RANCANG BANGUN ALGORITMA AKUSTIK
SINGLE
BEAM
UNTUK DETEKSI BAWAH AIR
ASEP MA’MUN
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa tesis berjudul Rancang Bangun Algoritma Akustik Single Beam Untuk Deteksi Bawah Air adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Agustus 2014
Asep Ma’mun
RINGKASAN
ASEP MA’MUN. Rancang Bangun Algoritma Akustik Single Beam Untuk Deteksi Bawah Air. Dibimbing oleh HENRY M. MANIK dan TOTOK HESTIRIANOTO.
Aplikasi teknologi akustik untuk deteksi bawah laut dapat dibedakan menjadi empat tipe, yaitu single beam, dual beam, split beam, dan multi beam. Semakin banyak beam yang digunakan pada instrumen, maka semakin mahal harganya dan detail serta akurasi yang didapat semakin tinggi. Meskipun demikian, single beam merupakan alat yang lebih banyak digunakan di negara berkembang. Kehadiran Cruzpro fishfinder digunakan sebagai alternatif pemakaian multi beam. Penyimpanan data internal Cruzpro fishfinder cenderung mudah dilakukan, tetapi ketiadaan software untuk pengolahan data mentah ini menjadi hal penting untuk selanjutnya dikembangkan. Penelitian ini mengembangkan algoritma untuk pengolahan sinyal akustik yang dibuat dalam bentuk package Matlab. Pengujian dilakukan terhadap suatu nilai akustik pasti yang sering disebut bola sphere dan kemudian hasil tersebut dibandingkan dengan hasil dari instrumen akustik split beam. Alat yang digunakan sebagai pembanding adalah Simrad EY60 dan Biosonics DTx1000. Uji statistik yang digunakan pada penelitian yaitu Uji akurasi dan presisi, Uji homogenitas (Uji Fisher) dan Uji beda rerata dua kelompok data tidak berpasangan. Pengujian statistik digunakan untuk pembuktikan hipotesis penelitian. Dari penelitian ini didapatkan akurasi dan presisi yang baik dari pengukuran terhadap bola sphere. Beberapa rumusan seperti
beam width, koefisien absorbsi, dan kecepatan suara, digunakan selama pengembangan software dan dalam pendeteksian bola sphere. Hasil kuantifikasi yang diperoleh merupakan nilai Target strength (TS) dan Scattering Volume (SV). Pengembangan algoritma ini telah terbukti efisien dan berguna untuk pengolahan data mentah single beam Cruzpro, dengan standar deviasi 0,13 dengan selang kepercayaan 95%. Perangkat lunak yang dikembangkan untuk pengolahan data
single beam mengikuti kepada tiga bagian utama dalam sebuah software pengolahan yaitu bagian masukan, bagian pengolahan dan bagian visualisasi. Bagian masukan pada software ini terdiri dari beberapa inputan isian dan beberapa bagian inputan pilihan secara bertahap.Dilakukan juga pemecahan beberapa algoritma dalam bentuk fungsi untuk memudahkan dalam proses pembelajaran dan pengembangan software dimasa berikutnya.Hasil pengaplikasian algoritma single beam terhadap lamun, terumbu karang, pasir, lumpur dan ikan menunjukan data yang homogen dengan hasil pengukuran split beam. Disimpulkan bahwa algoritma yang diciptakan dapat diaplikasikan untuk deteksi bawah air.
SUMMARY
ASEP MA’MUN. Design of Algorithms and It’s Application to Single beam
Acoustic For Underwater Detection. Supervised by HENRY M. MANIK and TOTOK HESTIRIANOTO.
Application of acoustic technology for underwater detection can be differentiated into four types, namely single beam, dual beam, split beam and multi beam. The more acoustic beam constructed, the more expensive the instrument the higher details of detection and accuracy resulted. Single beam acoustic is the most widely applied acoustics particularly in developing country. Cruzpro Fishfinder replace the using of multi beam. Its relatively easy for cruzpro to storage the internal data, although found the lack of software to process the raw data. However those problem become necessary to improve the instrument. The aim of This study is to develope algorithm for acoustic signal processing embedded in Matlab package. Tests conducted on a definite value which is often called the acoustic sphere ball. The next step is comparing both of result from cruzpro and and split beam acoustic instruments. The tools used for comparison is the Simrad EY60 and Biosonics DTx1000. The statistical test used to study the accuracy and precision test , homogeneity test ( Fisher test ) and the mean of two different test unpaired data group. The test statistic used for proving the research hypothesis. Measurement of sphere ball show a good in accuracy and precision. Several functions were applied, beam width, absorption coefficient and sound velocity; during software development and sphere detection. The result of Quantification are value of Target strength ( TS ) and Scattering Volume ( SV ). Algorithm developed was proven efficient and useful for raw data processing of Cruzpro singlebeam acoustic, as revealed by low standard deviation of 0,13 with 95% confidence interval. The software developed for data processing single beam follow the three main parts to a processing software that is part of the input , the processing and visualization parts. The input to the software part consists of some input fields and some parts of input choices with step by step. The sofware also solving some algorithms in the form of functions to facilitate the learning process and software development in the next time. The application of algorithm to sea grass, coral reef, sand, clay and fish parallel to the split beam data. The conclusion is that the algorithm created can be applied for underwater detection.
© Hak Cipta Milik IPB, Tahun 2014
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknologi Kelautan
RANCANG BANGUN ALGORITMA AKUSTIK
SINGLE
BEAM
UNTUK DETEKSI BAWAH AIR
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2014
Judul Tesis : Rancang Bangun Algoritma Akustik Single Beam Untuk Deteksi Bawah Air
Nama : Asep Ma’mun
NIM : C552110091
Disetujui oleh Komisi Pembimbing
Henry M.Manik,S.Pi, MT.Ph.D Ketua
Dr.Ir. Totok Hestirianoto, M.Sc. Anggota
Diketahui oleh
Ketua Program Studi Teknologi Kelautan
Dr. Ir. Jonson Lumban. Gaol, M.Si.
Dekan Sekolah Pascasarjana
Dr. Ir. Dahrul Syah, M.Sc.Agr
PRAKATA
Puji syukur penulis panjatkan kehadirat Allah SWT karena rahmat dan karunianya sehingga tesis ini dapat terselesaikan. Tesis yang berjudul Rancang Bangun Algoritma Dan Aplikasinya Pada Akustik Single Beam Untuk Pendeteksian Bawah Air sebagai salah satu syarat untuk menyelesaikan program
magister sains .
Penulis mengucapkan terima kasih yang sebesar-besarnya kepada Dr. Ir. Henry M. Manik, M.T dan Dr. Ir. Totok Hestirianoto, M.Sc yang bersedia menjadi dosen pembimbing serta telah memberikan saran dan kritik atas penyelesaian tesis ini. Terima kasih kepada Dr.Ir. Chandra Nainggolan, M.Sc selaku dosen penguji tamu dan Dr.Ir. Sri Pujiyati, M.Si atas saran dan masukan kepada penulis. Kedua orang tua Muhammad Shoim dan Siti Jubaedah atas do’a dan motivasinya. Istri tercinta Ranum Esha Kharishma dan buah hati Hana Elora Faiha atas cinta kasih serta motivasinya. Penulis mengucapkan banyak terima kasih kepada seluruh staff Laboratorium Akustik dan Instrumentasi Kelautan serta Balai Riset Perikanan Laut (BRPL-KKP) atas pembelajaran, kemudahan dan dukunganya terhadap penelitian ini. Terima kasih kepada tim riset (2009) Sri Ratih Deswati dan Syahrul Purnawan serta tim riset (2012) Bambang Purwanto, Siti Hasanah atas data pendukung yang digunakan penulis. Terima kasih juga penulis sampaikan kepada pihak-pihak yang senantiasa memberikan dukungan kepada penulis baik dalam doa dan motivasi dalam mendukung pencapaian penelitian ini. Semoga karya ilmiah ini bermanfaat bagi kemajuan ilmu pengetahuan.
Bogor, Agustus 2014
DAFTAR ISI
DAFTAR TABEL xi
DAFTAR GAMBAR xi
DAFTAR LAMPIRAN xii
1 .. PENDAHULUAN 1
Latar belakang 1
Perumusan masalah 2
Kerangka pemikiran 2
Tujuan penelitian 3
Manfaat Penelitian 4
Hipotesis 4
2 .. METODE 6
Bahan penelitian 6
Peralatan penelitian 6
Lokasi penelitian dan waktu penelitian 6
Prosedur penelitian 8
Analisis data 10
3 HASIL DAN PEMBAHASAN 14
Algoritma nilai hambur balik single beam echosounder 14
Hasil uji kalibrasi 16
Hasil uji akurasi dan presisi 21
Rancang bangun software pengolahan 21
Aplikasi terhadap objek dan perbandingan dari hasil alat lain 26
Vegetasi lamun 27
Terumbu karang 29
Substrat dasar 32
Lempung 33
Pasir 35
Ikan 38
4 SIMPULAN DAN SARAN 40
Simpulan 40
Saran 41
DAFTAR PUSTAKA 41
LAMPIRAN 45
DAFTAR TABEL
1 Persamaan statistik 11
2 Persamaan statistik uji akurasi dan presisi 11
3 Deskripsi statistik 18
4 Distribusi persentase data hasil pengukuran 19
5 Uji homogenitas Fisher 20
6 Hasil uji akurasi dan presisi terhadap bola sphere 21 7 Deskripsi statistik data pengukuran lamun (Cruzpro & Simrad EY60) 28 8 Deskripsi statistik data Terumbu Karang (Cruzpro & Simrad EY60) 31 9 Deskripsi statistik data Lempung (Cruzpro & Simrad EY60) 34 10 Deskripsi statistik data Pasir (Cruzpro & Simrad EY60) 37 11 Deskripsi statistik data Ikan (Cruzpro & Biosonics Dtx1000) 39
DAFTAR GAMBAR
1 Lokasi aplikasi penelitian 7
2 Prosedur penelitian 9
3 Proses pembentukan dan ketentuan pengujian algoritma 10 4 Proses pembentukan package pengolahan data di Matlab 12 5 Pengujian hasil algoritma single beam (Cruzpro fishfinder) dengan hasil
split beam echosounder (Simrad EY 60 & Biosonics Dtx1000) 13
6 (a) spesifikasi bola sphere, (b) visualisasi data hasil pengukuran,
(c) Gambar echo envelope nilai TS (dB) 17
7 Distribusi frekuensi data hasil pengukuran 19
8 (a) Tampilan package input di Matlab, (b) input parameter alat, (c) input parameter lingkungan dan pemilihan nilai kecepatan suara 22 9 Proses pembentukan algoritma nilai hambur balik akustik suatu objek
dalam bentuk Target Strength (TS) dan Scattering volume (Sv) 24
10 Vegetasi lamun (Enhalus acroides) 27
11 Hasil pengukuran lamun (Cruzpro & Simrad EY 60) 28
12 Terumbu karang Nonacropora (Massive) 30
13 Hasil pengukuran Terumbu karang (Cruzpro & Simrad EY 60) 31
14 Substrat dasar (lempung) 33
15 Hasil pengukuran lempung (Cruzpro & Simrad EY 60) 34
16 Substrat dasar (pasir) 36
17 Hasil pengukuran pasir (Cruzpro & Simrad EY 60) 36
18 Ikan air tawar Nila (Oreochromis niloticus) 38
DAFTAR LAMPIRAN
1 Spesifikasi Cruzpro fishfinder (Single beam) 45 2 Spesifikasi dan Setting Simrad EY 60 (Split beam) 46
3 Spesifikasi Biosonics Dtx1000 (Split beam) 47
4 Spesifikasi Bola sphere dan besarnya nilai Target Strength (TS) 48 5 Deskripsi statistik hasil pengukuran bola sphere 48 6 Nilai rata-rata, simpangan baku dan standart error dari Lamun 49 7 Hasil uji statistik homogenitas data Lamun (Cruzpro & Simrad EY60) 49 8 Nilai rata-rata, simpangan baku dan standart error dari Terumbu karang 50 9 Hasil uji statistik homogenitas data Terumbu Karang (Cruzpro & Simrad
EY60) 50
10 Nilai rata-rata, simpangan baku dan standart error dari Lempung 51 11 Hasil uji statistik homogenitas data Lempung (Cruzpro & Simrad EY60) 51 12 Nilai rata-rata, simpangan baku dan standart error dari Pasir 52 13 Hasil uji statistik homogenitas data Pasir (Cruzpro & Simrad EY60) 52 14 Nilai rata-rata, simpangan baku dan standart error dari ikan 53 15 Hasil uji statistik homogenitas data Pasir (Cruzpro & Biosonics
Dtx1000) 53
1
1
PENDAHULUAN
Latar Belakang
Teknologi akustik merupakan teknologi yang kini banyak diandalkan dalam pendekteksian bawah air seperti stok sumber daya organisme, klasifikasi dasar perairan, migrasi organisme, bahkan dalam beberapa hal untuk pengkajian struktur bangunan, monitoring dan estimasi kandungan mineral. Teknologi hidroakustik pada dasarnya dikembangkan dalam dua jenis sistem, yaitu teknologi akustik sistem pasif (memanfaatkan sumber suara dari luar instrument ) dan teknologi akustik sistem aktif ( instrumen dapat membentuk dan memancarkan suara kemudian menangkap suara yang kembali ke instrumen) (Simmonds and MacLennan, 2005). Lurton (2002) menyatakan bahwa instrumen hidroakustik dapat dibedakan menjadi 4 jenis yaitu single beam, dual beam, split beam dan
multi beam. Banyaknya beam pada instrumen tersebut yang membedakan satu dan lainya. Dalam penginterpretasian data akustik meliputi beberapa tahapan yaitu proses pembentukan suara, pelepasan suara, pemantulan oleh objek, penangkapan sinyal yang kembali dan penginterpretasian data. Pemerosesan sinyal yang kembali merupakan salah satu bagian yang penting dari penginterpretasian data, karena pada tahapan ini akan menentukan kualitas data yang diharapkan dapat menggambarkan objek atau lingkungan disekitarnya. Kalibrasi merupakan faktor yang perlu dilakukan pada setiap pemerosesan data karena dalam proses perjalananya akan dipengaruhi oleh beberapa faktor dari lingkungan maupun dari komponen alat itu sendiri (Urick, 1983).
Semakin banyak beam yang digunakan pada alat, umumnya akan memberikan hasil yang baik untuk penginterpretasian data. Alat yang termasuk jenis ini seperti pada jenis split beam dan multi beam. Alat jenis ini merupakan teknologi yang cukup mahal, sehingga pada saat ini hanya beberapa instansi di Indonesia yang memiliki kemampuan untuk pengadaan alat tersebut. Fishfinder
merupakan alat akustik yang relatif jauh lebih murah dan mudah dijangkau oleh lembaga-lembaga atau institusi yang memiliki anggaran yang cukup minim seperti perguruan tinggi.
Fishfinder merupakan salah satu alat akustik yang termasuk kedalam jenis
Perumusan Masalah
Teknologi akustik merupakan teknologi yang diandalkan dalam beberapa kajian sumberdaya alam seperti pengkajian stok ikan di dalam kolom perairan, pemetaan dasar perairan bahkan digunakan untuk melihat migrasi organ renik seperti plankton (Lurton, 2002). Teknologi akustik umumnya merupakan teknologi yang mahal, sehingga daya jangkau kepemilikan instrumen tertentu seperti jenis split beam hanya dimiliki oleh lembaga-lembaga ataupun swasta yang memiliki kepentingan dan memiliki anggaran yang cukup tinggi. Dengan seiring berkembang teknologi akustik jenis single beam yang memiliki kemampuan menyimpan data seperti data posisi dan kedalaman bahkan jenis tertentu dapat menyimpan data echo. Salah satu instrumen ini adalah Cruzpro Fishfinder yang dikembangkan di New Zealand.
Pada awalnya alat ini dikembangkan untuk pencarian ikan di dalam kolom perairan. Kemampuanya menyimpan nilai hambur balik belum diiringi dengan pengembangan algoritma pengkuantifikasian dan software pengolahan untuk suatu pengkajian. Nilai hambur balik dapat digunakan dalam pengkajian dan pemetaan suatu objek didalam kolom perairan, hal ini karena pada dasarnya setiap organisme memiliki nilai hambur balik yang berbeda atau sering dikenal dengan memiliki nilai Target Strength yang berbeda (Simmonds and MacLennan, 2005). Pola beam yang berbentuk conical dengan luasan tertentu secara matematis dapat digunakan untuk menentukan nilai hambur balik dalam luasan volume atau dikenal dengan istilah Scattering volume (Lurton, 2002). Nilai-nilai tersebut secara lebih jauh dapat digunakan untuk mengkaji sumberdaya organisme diperairan, seperti kepadatan ikan.
Software pengolahan data akustik pada dasarnya dikembangkan dari bahasa pemerograman C++, adapun perbedaan dalam pembuatanya biasanya dalam bentuk penginisialisasian, alur kerja dan eksekusi dari suatu fungsi seperti dikembangkan oleh Matlab (Hunt et al, 2001). Matlab merupakan bahasa pemerograman yang mudah dipelajari, karena pada dasarnya bekerja dalam bentuk matrik-matrik data. Kemampuan dalam pengolahan dan pengoperasian matrik menjadi kunci utama untuk mempelajari program ini (Tanudjaja, 2007). Pada saat ini bahasa pemerograman Matlab terus berkembang dalam berbagai hal seperti pemerosesan signal bahkan dalam sistem kontrol. Program pemerosesan signal akustik yang dikembangkan dari Matlab dalam bentuk package yaitu untuk pengolahan data split beam yang dikembangkan oleh Rich Towler dengan nama
package yaitu ReadEKraw dan untuk pengkajian seismik yang diberi nama SeisLab dikembangkan oleh Eike Rietsch. Oleh karena itu, perlu dikembangkan juga package Matlab untuk pengolahan data single beam untuk pengkajian pemetaan ataupun pengkajian kepadatan objek perairan.
Kerangka Pemikiran
3 mengalami perkembangan kemampuan dari yang tidak bisa menyimpan data hingga kini memiliki kemampuan untuk menyimpan data. Salah satu jenis dari alat ini adalah CruzPro Fishfinder yang dikembangkan perusahaan CruzPro Ltd yang berlokasi di New Zealand. Teknologi ini jauh lebih murah bila dibandingkan dengan jenis lainya, sehingga mudah dijangkau oleh instansi yang memiliki keperluan akan alat ini.
Kemampuan penyimpanan data ini tidak diiringi dengan pengembangan software pengkuantifikasian data yang diperoleh, padahal data yang disimpan merupakan data bilangan digital number berbentuk biner yang secara umum mudah diekstrak dan dapat diolah. Data tersebut dapat diolah menjadi nilai-nilai yang lebih untuk proses analisis lebih lanjut seperti untuk pemetaan suatu objek bahkan untuk kajian kepadatan objek.
Kemampuan Cruzpro Fishfinder dalam menyimpan nilai hambur balik dalam bentuk digital number diperlukan algoritma yang sesuai untuk mengkonversinya menjadi nilai Target strength ataupun Scattering volume
sehingga dapat diaplikasikan lebih jauh. Mudahnya bahasa pemerograman Matlab dan banyaknya user pengguna program ini sehingga memungkinkan dikembangkanya software pengolahan data akustik berbasis package untuk pengolahan data single beam CruzPro fishfinder. Proses akurasi dan presisi serta kemudahan penggunaanya diperlukan nilai-nilai pembanding yang terlebih dahulu telah dilakukan ataupun terhadap nilai baku yang sudah terukur yang telah ada, sehingga algoritma yang dikembangkan sesuai dan dapat diaplikasikan. Kemudahan dan user friendly dalam pembuatan program merupakan hal yang terpenting, karena akan jauh lebih mudah dipahami dan dimengerti serta mudah diaplikasikan oleh pengguna untuk hal tertentu.
Tujuan Penelitian
Tujuan dari penelitian ini adalah sebagai berikut :
1) Menciptakan algoritma dan membentuknya dalam software pengolahan berbasis package Matlab untuk pengkuantifikasian data hidroakustik seperti
Target strength dan Scattering volume dari data single beam, dimana nilai-nilai ini sangat penting untuk pengkajian sumber daya dan pemetaan habitat dasar perairan.
Manfaat Penelitian
Penelitian ini dapat memberikan gambaran dalam pembentukan algoritma untuk pengkuantifikasian data akustik, khususnya data single beam echosounder sehingga dapat diaplikasikan untuk kegiatan pengkajian sumberdaya ataupun habitat dasar perairan. Penelitian ini menghasilkan software pengolahan berbasis
package Matlab yang mudah dipelajari dan dikembangkan, sehingga sangat bermanfaat untuk kegiatan-kegiatan pengajaran maupun penelitian aplikatif lainya.
Hipotesis
Dalam penelitian ini terdapat asumsi-asumsi yang berlaku pada algoritma yang telah dibuat dan hipotesis yang akan diuji, dapat dijelaskan sebagai berikut:
Asumsi Algoritma
Setiap benda ataupun organisme memiliki nilai hambur balik yang berbeda-beda tergantung kepada bahan penyusun dari benda atau organisme tersebut, nilai hambur balik digunakan sebagai karakteristik atau sebagai bahan identifikasi objek.
Penyimpangan nilai atau error pengukuran akibat faktor lainya yang tidak diperhitungkan dalam pembentukan algoritma bersifat independen.
Hasil dari kuantifikasi algoritma jika dibandingkan dengan nilai kontrol ( Bola sphere, spesifikasi terlampir) dengan menggunakan uji akurasi diperoleh hasil akurasi dan presisi yang baik, maka algoritma ini dapat digunakan dan dicari turunan algoritmanya.
Perbedaan penggunaan jenis alat untuk data pembanding pada penelitian ini tidak berpengaruh signifikan selama hasil yang diperoleh dalam kisaran nilai hambur balik suatu objek, hal ini dirujuk dari beberapa penelitian yang telah dilakukan.
Perbedaan waktu dan lokasi pengambilan data tidak berpengaruh signifikan terhadap nilai hambur balik yang diperoleh, selama nilai pengaruh lingkungan digunakan dalam pembentukan algoritma.
Data sekunder dan hasil data ground check yang digunakan sebagai data pembanding dianggap telah teruji hasilnya, karena pada umumnya sudah terpublikasikan secara ilmiah.
Beberapa hipotesis yang akan diuji pada penelitian ini antara lain :
Pembentukan hipotesis Uji Akurasi dan Presisi mengacu kepada Soeta’at (1996) 1. Uji Akurasi dan Uji Presisi
Akurasi
5 atau sama dengan dua kali jumlah total kuadrat kontrol (bola sphere).
Presisi kurang : jika jumlah total kuadrat hasil pengukuran lebih besar dari dua kali jumlah total kuadrat kontrol (bola sphere). Akurasi baik : Σselisih2 (3x Σkntrl2)
2. Uji Homogenitas ( Uji Fisher)
H0 : Nilai varian dari kelompok data hasil pengukuran sama dengan nilai varian dari kelompok data kontrol atau data pembanding (instrumen lain). Dapat dikatakan nilai yang dihasilkan homogen.
H1 : Nilai varian dari kelompok data hasil pengukuran tidak sama dengan nilai varian dari kelompok data kontrol atau data pembanding (instrumen lain). Dapat dikatakan nilai yang dihasilkan tidak homogen.
H0 : σ12σ22 H1 : σ12 > σ22
Sedangkan untuk kriteria pengujian hipotesis adalah sebagai berikut: Terima H0, jika Fhitung < Ftabel dan Tolak H0, jika Fhitung > Ftabel 3. Uji Beda Rerata Dua Kelompok Data (tidak berpasangan)
H0 : Varian nilai hambur balik menggunakan instrumen singel beam Cruzpro fishfinder sama dengan menggunakan instrumen split beam
Biosonic Dtx 1000 atau Simrad EY 60.
H1 : Varian nilai hambur balik menggunakan instrumen singel beam Cruzpro fishfinder tidak sama dengan nilai hambur balik menggunakan instrumen split beam Biosonic Dtx 1000 atau Simrad EY 60.
2
METODE
Bahan Penelitian
Dalam penelitian ini menggunakan dua jenis data yaitu data primer dan data sekunder dengan daerah perairan pengambilan yang sama. Data sekunder yang digunakan adalah data split beam Simrad EY 60 ( Vegetasi Lamun, Terumbu Karang dan Substrat dasar perairan) pada 2009 dan data single beam CruzPro
fishfinder ( Vegetasi Lamun, Terumbu Karang dan Substrat dasar perairan) yang telah dilakukan pada tahun 2012. Data ikan dilakukan pengambilan data langsung secara simultan antara split beam Biosonic DTX 1000 dengan single beam
CruzPro fishfinder pada tahun 2013. Bola sphere Biosonic 200 KHz (d = 36 mm, TS = -39,9 dB, dengan C = 1500 m/s dan durasi pulsa 0,5 ms).
Peralatan Penelitian
Alat yang digunakan pada saat penelitian yaitu singel beam echosounder
CruzPro (spesifikasi Lampiran 1), Accu 60 AH 12V, DC to AC Converter, Power Supply 12 V 10 A, GPS Garmin 78, kamera digital, Laptop dan PC komputer dan kapal nelayan. Spesifikasi alat dan parameter setting untuk pengambilan data split beam echosounder Simrad EY 60 terlampir pada Lampiran 2. Untuk pengambilan data ikan menggunakan split beam echosounder Biosonic DTX 1000 spesifikasi terlampir pada Lampiran 3 .Pengembangan algoritma menggunakan software Matlab 2010a serta SPSS 17 dan Microsoft exell untuk uji statistik data.
Lokasi Penelitian dan Waktu Penelitian
Penelitian ini dilakukan di dua lokasi penelitian yaitu di Watertank
Laboratorium Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, FPIK-IPB untuk pengujian algoritma yang telah diciptakan dilakukan di daerah perairan Pulau Pari, Kabupaten Administratif Kepulauan Seribu, DKI Jakarta (Gambar 1) merupakan lokasi pengambilan data vegetasi lamun, terumbu karang dan substrat dasar perairan. Pengambilan data ikan dilakukan di Watertank Laboratorium Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, FPIK-IPB. Pengambilan data lapangan dilakukan pada dua tahun yang berbeda yaitu pada 14-15 April 2012 pengambilan data menggunakan single beam Cruzpro fishfinder dan pada 18-20 Mei 2009 pengambilan data dengan menggunakan echosounder split beam Simrad EY 60. Adanya perbedaan waktu pengambilan data, sehingga dibentuk beberapa asumsi seperti dijabarkan dibagian sebelumnya. Pengambilan data ikan dengan Biosonic DTX 1000 pada 17 Oktober 2013. Pengembangan algoritma untuk single beam
7
penelitian
Ga
mbar
1. Lok
asi P
ene
li
ti
an
Prosedur Penelitian
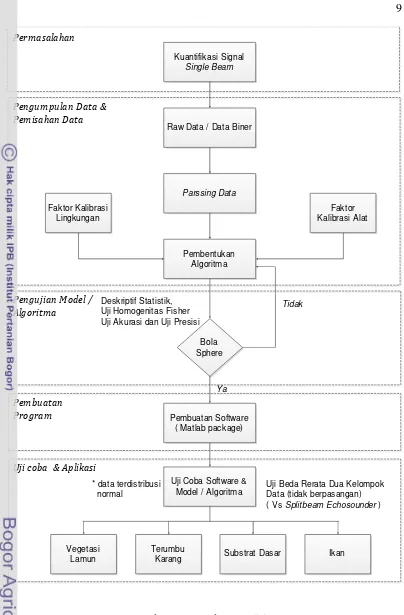
Sesuai dengan yang melatarbelakangi penelitian yaitu adanya permasalahan dalam proses kuantifikasi sinyal hambur balik yang dihasilkan
single beam echosounder, maka penelitian ini dimulai dengan proses pengambilan data bola sphere. Data hasil akusisi merupakan raw data berbentuk bilangan biner kemudian data tersebut akan dipisahkan menjadi beberapa kelompok data sesuai jenis data yang diperoleh. Dalam pembentukan algoritma dibutuhkan faktor-faktor lingkungan dan beberapa parameter dari alat itu sendiri yang digunakan sebagai proses kalibrasi, dengan harapan data yang diperoleh mencerminkan dari objek secara hidroakustik.
Data yang terkumpul dan faktor kalibrasi yang diperoleh kemudian diterapkan pada algoritma yang dibentuk, kemudian hasil kuantifikasi dilihat secara deskriptif statistik dan dibandingkan dengan nilai hambur balik bawaan bola sphere, setelah itu dilakukan pengujian algoritma dengan Uji Homogenitas Fisher (Uji-F) dan Uji Akurasi dan Presisi. Jika semua hasil yang diperoleh menujukan nilai yang sesuai dengan spesifikasi bawaan dari bola sphere dan data yang diperoleh homogen serta instrumen tersebut dikategorikan baik, maka algoritma yang diciptakan dapat digunakan tetapi jika tidak maka perlu dilakukan perbaikan algoritma yang dibentuk. Langkah berikutnya adalah pembuatan software berbentuk package Matlab karena umumnya data berbentuk biner dapat diakses langsung oleh bahasa pemerograman C++ seperti Matlab.
9 ( Vs Splitbeam Echosounder ) * data terdistribusi
Analisis Data
1. Algoritma nilai hambur balik Single beam echosounder
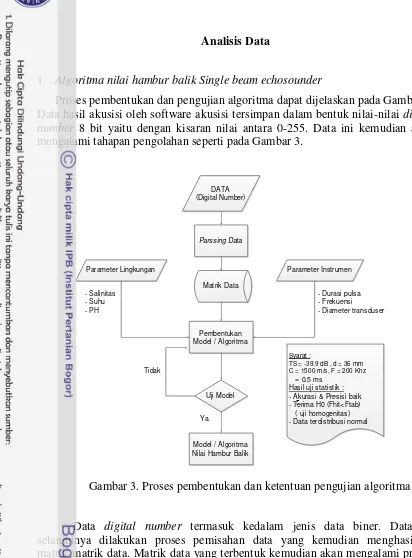
Proses pembentukan dan pengujian algoritma dapat dijelaskan pada Gambar 3. Data hasil akusisi oleh software akusisi tersimpan dalam bentuk nilai-nilai digital number 8 bit yaitu dengan kisaran nilai antara 0-255. Data ini kemudian akan mengalami tahapan pengolahan seperti pada Gambar 3.
Gambar 3. Proses pembentukan dan ketentuan pengujian algoritma
Data digital number termasuk kedalam jenis data biner. Data ini selanjutnya dilakukan proses pemisahan data yang kemudian menghasilkan matrik-matrik data. Matrik data yang terbentuk kemudian akan mengalami proses pengkuantifikasian beserta beberapa data lain yang diukur untuk proses pembentukan algoritma. Beberapa data lain yang digunakan merupakan data-data yang berasal dari parameter instrumen dan parameter lingkungan. Parameter-parameter ini digunakan sebagai upaya meningkatkan akurasi hasil algoritma dengan kondisi sebenarnya.
11 algoritma kemudian akan di uji secara statistik yaitu menggunakan uji akurasi dan presisi dan uji homogenitas (uji Fisher), dengan ketentuan hasil pengujian dapat dilihat pada Gambar 3. algoritma yang telah sesuai dengan ketentuan yang ada kemudian akan digunakan sebagai dasar pembentukan software pengolahan berbasis package Matlab. Beberapa persamaan matematis yang digunakan dalam proses pengujian secara statistik dari data -data yang diperoleh pada Tabel 1.
= varian kelompok kontrol = banyaknya sampel menggunakan beberapa persamaan matematis antara lain sebagai berikut :
2. Pembentukan software
Pengolahan data Cruzpro fishfinder dikembangkan dalam bentuk package Matlab. Pengembangan tersebut diharapkan dapat terus berkembang seperti pengolahan untuk data split beam Simrad yang dikembangkan oleh NOAA dengan autornya
yaitu Ritch Towler. Berikut proses pembentukan software package yang dikembangkan, dijelaskan pada Gambar 4.
Gambar 4. Proses pembuatan package pengolahan data di Matlab
Proses pertama pengidentifikasian data di Matlab. Matlab umumnya dapat mengidentifikasi data dalam bentuk bilangan biner atau digital number. Data hasil akusisi Cruzpro merupakan data berbentuk bilangan biner. Data hasil akusisi dari Cruzpro fishfinder kemudian akan dilakukan proses pemisahan data menjadi matrik-matrik tertentu. Pemisahan dan pembentukan matrik ini berdasarkan banyaknya kolom dan baris yang dihasilkan.
Matrik yang telah terbentuk kemudian akan mengalami proses penyaringan bandpass filter hal ini dilakukan untuk penghilangan gangguan yang dihasilkan oleh alat ataupun dari lingkungan. Proses penyaringan ini bertujuan agar nilai yang akan dikuantifikasi merupakan nilai dari objek yang sebenarnya. Proses penyaringan ini dalam istilah akustik sering dikenal dengan istilah
Threshold, dimana untuk nilai batasanya akan disesuaikan dengan kisaran nilai objek yang akan dianalisis. Kisaran nilainya akan mengacu kepada penelitian
13 yang telah dilakukan. Data hasil proses penapisan kemudian akan dikuantifikasi dengan algoritma yang diciptakan.
Dalam pembentukan model dibutuhkan beberapa parameter lingkungan dan parameter alat, sehingga dibutuhkan isian untuk memasukan nilai tersebut. Nilai-nilai yang akan dimasukan yaitu untuk parameter lingkungan (suhu, salinitas, pH dan kedalaman pengukuran), sedangkan untuk parameter alat (durasi pulsa, frekuensi dan diameter transduser). Parameter-parameter yang diperoleh selanjutnya akan dikuantifikasi menjadi beberapa nilai yang dibutuhkan untuk penentuan nilai hambur balik seperti kecepatan suara, beam volume, beam pattern
dan koefisien absorbsi. Faktor - faktor tersebut secara langsung sangat mempengaruhi besar kecilnya nilai hambur balik dari suatu objek.
Hasil dari kuantifikasi algoritma kemudian divisualisasikan dalam bentuk gambar dua dimensi. Gambar yang disajikan adalah gambar hasil kuantifikasi dari algoritma berupa gambar Target strength dan Scattering volume. Gambar tersebut kemudian dapat disimpan dalam beberapa bentuk antara lain berbentuk fig, jpeg, png, bmp dan lain-lain.
3. Aplikasi terhadap objek dan hasil instrumen lain
Dalam pengaplikasian model dan algoritma yang dihasilkan diperlukan perbandingan terhadap instrumen lain yang sifatnya sudah banyak digunakan dan diaplikasikan untuk berbagai objek. Salah satu instrument yang banyak digunakan adalah instrumen split beam seperti Simrad EY60 dan Biosonic dtx 1000. Berikut adalah proses perbandingan terhadap instrumen tersebut pada Gambar 5.
Gambar 5. Pengujian hasil algoritma singel beam (Cruzpro fishfinder)dengan hasil split beam echosounder (Simrad EY 60 & Biosonic Dtx 1000)
Data yang dihasilkan dari software akusisi pabrikan dari masing-masing instrumen, kemudian diekstrak oleh masing-masing software pengolahan. Software pengolahan untuk Cruzpro menggunakan package Matlab yang dikembangkan dalam penelitian ini, untuk data split beam menggunakan dua jenis
software yaitu package Matlab (NOAA) untuk data Simrad EY60 dan Echoview yang dibantu dengan dongle (instrumen pengekstrak) untuk data Biosonic Dtx1000. Nilai dari masing-masing hasil pengekstrakan kemudian akan dibandingkan satu sama lainya. Data hasil dari kuantifikasi tersebut akan dibandingkan . Nilai hambur balik dari suatu volume atau sering disebut dengan istilah Scattering volume (Sv) yang akan dibandingkan. Data tersebut akan mengalami Uji Beda Rerata Dua Kelompok data (tidak berpasangan). Algoritma ini dikatakan sesuai apabila berdasarkan probabilitas (tk signifikansi: 5%) hasil uji coba tersebut jika probabilitas (p>0,05), maka Ho diterima dan Jika probabilitas (p< 0,05), maka Ho ditolak (Sarwono et al, 2012).
.
3
HASIL DAN PEMBAHASAN
Algoritma Nilai Hambur Balik Single Beam Echosounder
Nilai hambur balik suara merupakan logaritimik perbandingan antara besarnya intensitas yang dikembalikan berbanding dengan besarnya intensitas yang dipancarkan oleh alat tersebut. Besaran yang sering digunakan yaitu desibel (dB) (Lurton, 2002). Dalam proses pembentukan, pemancaran dan penerimaan kembali sinyal yang kembali kealat (echo) dalam proses perjalananya mengalami penyerapan dan penghamburan suara baik dari suatu medium/lingkungan (ambient noise) atau dari objek yang berada pada kolom tersebut. Gangguan terhadap nilai intensitas suara dapat juga berlangsung di alat itu sendiri atau sering disebut dengan istilah self noise. Penggunan frekuensi dan faktor lingkungan sangat mempengaruhi kekuatan nilai hambur balik suara yang dihasilkan (Godlewka, 2008)
Sinyal yang kembali umumnya memiliki nilai intensitas yang lemah sehingga dibutuhkan penguatan terhadap sinyal tersebut yang besarnya dengan menggunakan fungsi TVG (Time Varied Gain) untuk singel target menggunakan fungsi 40 log r dan untuk multiple target menggunakan fungsi 20 log r
(Johanesson and Mitson, 1983). Dalam Biosonics (2004) besarnya nilai echo dari suatu target untuk singel beam Biosonic dapat dinyatakan sebagai berikut :
TS = 20 log (counts) - SL - RS + PS + TVG ... (1) dimana TS adalah nilai Target strength dari suatu target dan counts merupakan nilai intensitas yang diterima kembali oleh echosounder. SL merupakan source level atau intensitas suara yang dihasilkan oleh echosounder, dengan satuan dB re
1 Pa pada 1 m. RS (receive sensitivity) faktor sensitifitas dari echosounder, sedangkan PS (Power Setting) merupakan kekuatan listrik yang digunakan kedua faktor ini dinyatakan dalam bentuk logaritmik. TS merupakan nilai hambur dari
singel target maka fungsi TVG yang digunakan adalah :
15 TVG = 20 log r + r ... (3) Data hasil akusisi Cruzpro fishfinder merupakan data yang berbentuk nilai analog dengan bentuk biner yaitu 8 bit. Untuk mengkonversi nilai tersebut kedalam bilangan digital number, maka setiap nilai yang dihasilkan dibagi dengan nilai maksimum dari 8 bit yaitu 256. Tanudjaja pada tahun 2007 menyatakan proses ini sering disebut dengan istilah ADC (Analog to Digital converter). Dalam hal ini Cruzpro fishfinder menginisialisasi nilai tersebut dari 0 – 255, secara sistematis dapat dituliskan sebagai berikut :
Count =
... (4)
Dimana NA adalah nilai analog hasil akusisi Cruzpro fishfinder yang kemudian akan dinyatakan dalam bentuk logaritmik. Dalam pengkuantifikasian sinyal yang dihasilkan faktor bukaan beam, sudut yang dibentuk, jarak yang ditempuh dari pemancaran dan kembalinya sinyal memiliki pengaruh terhadap nilai hamburbalik yang dihasilkan. Menurut Greenlaw et al pada tahun (2004) menyatakan bahwa pengaruh pola beam yang dibentuk dari faktor-faktor tersebut perlu diperhitungkan. Secara matematis faktor beam dan polanya dapat dituliskan sebagai berikut :
Ce = 10 log ( c / 2 ) ... (5) Dimana c adalah kecepatan suara (m/s), merupakan durasi pulsa dengan satuan (s), sedangkan = equivalent two-way beam angle (steradians),Untuk
b2, sedangkan untuk nilai mean squared beam pattern factor (b2) dapat dicari dengan menggunakan persamaan berikut (Biosonic, 2004):
. Dimana, adalah major axis 3dB beam angle, adalah
minor axis 3dB beam angle dengan satuan derajat. Dari hasil serangkaian uji coba yang dilakukan diperoleh suatu tetapan yang dihasilkan sebagai faktor koreksi karena adanya perbedaan peruntukan penggunaan bola sphere (nilai kontrol) yang digunakan yaitu dalam hal jenis alat. Nilai dari faktor koreksi tersebut dapat ditentukan dengan persamaan :
corr = 10 log ( c / 2 ) ... (6) Hasil dari persamaan (5), merupakan suatu nilai yang mengambarkan kemampuan suatu alat untuk membedakan suatu objek dengan objek lain yang berdekatan. Dengan melihat faktor-faktor yang mempengaruhi nilai hambur balik suatu target disaat pemancaran, pemantulan atau dari instumen itu sendiri. Secara matematis dapat dibentuk algoritma yang dihasilkan untuk Cruzpro fishfinder
Persamaan (7) kemudian digunakan sebagai dasar algoritma untuk perhitungan nilai hambur balik suatu volume perairan atau sering disebut dengan istilah Volume backscattering strength (Sv). Nilai Sv penting untuk diketahui untuk pengkajian suatu nilai biomassa suatu organisme atau nilai hambur akustik suatu area dalam pengkajian habitat dasar perairan.
Dalam proses pembentukan algoritma untuk nilai Sv, TVG yang digunakan yaitu mengacu kedalam persamaan (3) karena digunakan untuk melihat
multiple target kemudian ditambahkan dengan hasil logaritmik dari luasan area reverberasi yang besarnya dapat dihitung sebagai berikut (Desamparados and Torres, 2010):
V = 10 log (π (D tan (Φ))2
) ... (8) Dimana, π tetapan bernilai 3.14, D adalah kedalaman perairan dengan satuan (m) dan Φ merupakan nilai dari setengah lebar beam (degree). Pembentukan algoritma untuk nilai Scattering volume yaitu dengan menggabungkan beberapa persamaan diatas yaitu, persamaan (1),(2),(3),(5),(6) dan (8), sehingga secara matematis dapat dituliskan persamaanya sebagai berikut : SV = 20 log (Count) - SL - RS + PS + TVG + Ce + corr + V ... (9) Algoritma yang dihasilkan pada persamaan (7) dan (9) penting penggunaanya untuk suatu pengkajian yang memanfaatkan nilai hambur balik dari sinyal akustik. Karena pada dasarnya kedua hal tersebut yang digunakan untuk suatu pengkajian seperti kuantifikasi biomassa, migrasi organisme, karakteristik suatu organisme, pemetaan habitat dasar perairan dan lain-lain.
Hasil Uji Kalibrasi
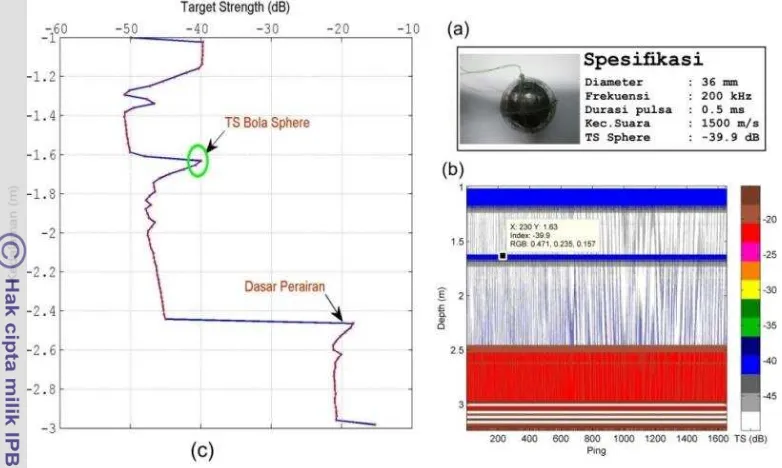
Berikut hasil kuantifikasi terhadap bola sphere sebagai uji validasi dan presisi algoritma yang telah diciptakan. Untuk spesifikasi bola sphere dan parameter alat yang digunakan ditunjukan oleh Gambar 6. bagian (a). nilai dan parameter tersebut merupakan hasil pengukuran dari rangkaian kalibrasi untuk penentuan nilai hambur balik bola sphere yang dilakukan oleh pihak produsen. Umumnya dilakukan dalam kondisi terkontrol pada saat pengukuran, sehingga semua kondisi dapat terukur dengan baik (Biosonic, 2004).
Gambar 6. bagian (b) menggambarkan visualisasi dua dimensi dari data hasil keluaran algoritma. Pada gambar tersebut diperoleh gambaran dari permukaan air, kolom perairan, target bola sphere dan dasar perairan. Dari gambar tersebut daerah permukaan pada kedalaman 0-1 m besar akan pengaruh
17
Gambar 6. (a) Spesifikasi bola sphere, (b) Visualisasi data hasil keluaran algoritma. (c) Gambar echo envelope nilai TS (dB)
Gangguan dari lingkungan terjadi karena pada daerah tersebut adanya reverberasi suara dipermukaan air akibat dasar perairan yang terlalu keras, yang menyebabkan suara memantul kembali kepermukaan dan dibagian permukaan terdapat tegangan permukaan air sebagai dinding yang memantulkan kembali lagi ke kolom perairan. Peristiwa ini akan terus berlangsung hingga intensitas dari suara tersebut melemah atau sampai suara tersebut mengalami penetrasi energinya stabil (Coates, 1990). Faktor lain yang mempengaruhi daerah tersebut yaitu dari kemampuan alat dalam membentuk pola beam di dalam kolom perairan. Suara akan memancar stabil pada daerah geometrical yang mana daerah ini memiliki batasan dari daerah akhir bagian near field hingga bagian akhir daerah far field
yang kisaranya dapat ditentukan dari diameter transduser, frekuensi yang digunakan dan kecepatan suara di perairan (Lurton, 2002).
Spesifikasi dari instrumen Cruzpro memiliki nilai near field kurang lebih sebesar 1 m untuk frekuensi 200 kHz dan frekuensi 50 kHz. Nilai far field untuk frekuensi 200 kHz sebesar 300 m, sedangkan untuk frekuensi 50 kHz sebesar 800 m (Berg, komunikasi pribadi, 14 Maret 2013). Daerah permukaan air sampai daerah near field tersebut merupakan daerah yang memiliki gangguan yang tinggi karena ketidakstabilan suara pada daerah tersebut. Hal ini merupakan salah satu yang disebut gangguan dari instrumen (Urick, 1983). Pada kedalaman 1,63 m terdeteksi objek bola sphere sebesar -39.9 dB yang digambarkan dengan warna biru dan inset tabel pada gambar yang menunjukan nilai pada titik tersebut. Pada pengukuran ini kondisi lingkungan yaitu, suhu perairan 26,7 0C, pH terukur 5,6 dan salinitas 0 0/00 . Kecepatan suara yang digunakan yaitu menurut algoritma Leroy (1969) sebesar 1500,96 m/s.
sebesar -39.9 dB dengan kecepatan suara sebesar 1500 m/s ditunjukan pada Lampiran 4. (Biosonic, 2004). Durasi pulsa yang digunakan sama dengan standar baku yang telah ditentukan dari pabrikan yaitu sebesar 0.5 ms. Penggunaan durasi pulsa yang sama merupakan syarat yang harus dipenuhi dalam uji kalibrasi dengan menggunakan nilai kontrol bola sphere, karena berkaitan dengan resolusi nilai hambur balik suara yang dihasilkan (Biosonic, 2004). Nilai hambur balik dari dasar perairan memiliki nilai sebesar -18 dB pada kedalaman 2,45 m yang digambarkan dengan warna coklat. Kuatnya nilai hambur balik ini karena dasar perairan tersebut merupakan dasar yang tersusun dari bahan kramik yang memiliki tekstur yang keras dan padat sehingga suara akan memantul dengan mudah jika mengenainya. Proses penyerapan suara pada karakteristik dasar perairan tersebut dapat dipastikan rendah karena memiliki porositas yang rapat.
Gambar 6. bagian (c) merupakan gambar rata-rata nilai hambur balik pada setiap lapisan kedalaman atau sering dikenal dengan istilah echo envelope dari proses nilai hambur balik suara yang dihasilkan. Dalam gambar tersebut telah terbentuk tiga gundukan utama yang menggambarkan nilai hambur balik masing-masing objek dimana objek tersebut adalah pertama daerah near field. Lurton pada tahun 2002 menyatakan bahwa near field merupakan daerah dimana terjadi reverbrasi yang sangat tinggi baik karena adanya tegangan permukaan air ataupun dari karakteristik instrumen tersebut dalam melakukan penetrasi suara kedalam perairan, umumnya terjadi pada daerah permukaan. gundukan kedua adalah nilai hambur balik dari target kontrol (bola sphere) dan gundukan yang ketiga adalah nilai hambur balik dari dasar perairan. Pengujian terhadap data hasil pengukuran yang diperoleh perlu diuji secara statistik dengan menggunakan bantuan software SPSS 17. Gambaran data secara statistik hasil kuantifikasi algoritma terhadap hasil pengukuran dan data kontol (bola sphere) disajikan Tabel 3.
Tabel 3. Deskripsi Statistik
19 penyebaran data dari nilai rata-ratanya atau dikenal dengan istilah simpangan baku yaitu sebesar 0,133 dB. Supardi (2011) menyatakan nilai varian adalah nilai kuadrat dari nilai simpangan baku dengan nilai sebesar 0,018, merupakan nilai variasi yang rendah. Nilai tersebut dapat dikatakan bahwa nilai hasil pengukuran tidak begitu menyimpang jauh dari nilai sebenarnya dan memiliki kemungkinan tingkat homogenitas yang cukup tinggi.
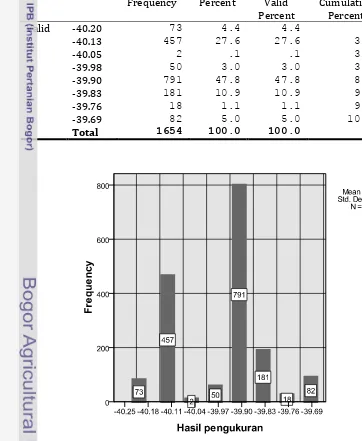
Pada Tabel 4. merupakan distribusi penyebaran data hasil kuantifikasi algoritma terhadap hasil pengukuran yang ditampilkan dalam bentuk persentase nilai yang dihasilkan terhadap jumlah data yang diperoleh. Sedangkan Gambar 5. adalah gambaran penyebaran frekuensi data terhadap nilai yang dihasilkan, dinyatakan dalam bentuk grafik batang.
Tabel 4. Distribusi persentase data hasil pengukuran
Frequency Percent Valid Percent
Cumulative Percent Valid -40.20 73 4.4 4.4 4.4
-40.13 457 27.6 27.6 32.0
-40.05 2 .1 .1 32.2
-39.98 50 3.0 3.0 35.2
-39.90 791 47.8 47.8 83.0
-39.83 181 10.9 10.9 94.0
-39.76 18 1.1 1.1 95.0
-39.69 82 5.0 5.0 100.0
Total 1654 100.0 100.0
Pada Tabel 4. dapat dilihat bahwa kemunculan nilai -39,90 dB hasil perhitungan algoritma memiliki frekuensi kemunculan paling besar dengan jumlah kemunculan sebanyak 791 data terhadap total data sebanyak 1654 data. Jika dinyatakan dalam bentuk persentase nilai ini memiliki persentase sebesar 47,8%. Sisa dari data yang diperoleh menyebar menujukan dibeberapa nilai antara lain nilai maksimum yang diperoleh -39,69 dB dan nilai minimum sebesar -40,20 dB. Nilai rata-rata dari hasil pengukuran diperoleh sebesar -39,96 dB dengan standar deviasi 0,133, nilai ini menunjukan tingkat penyebaran data terhadap rata-ratanya. Secara deskriptif statistik dapat dilihat bahwa nilai kemunculan paling banyak bernilai -39,90 dB, yaitu nilai yang sama dengan spesifikasi dari bola sphere yang digunakan.
Dilakukan pengujian statistik untuk melihat apakah data yang diperoleh hasil algoritma tersebut memiliki nilai yang hampir sama atau menyebar secara homogen dengan menggunakan uji homogenitas Fisher (Uji-F). Setelah data hasil pengukuran memenuhi kaidah sebaran normal dimana ratio antara skewness / std.Error of Skewness dan kurtosis / std.Error of Kurtosis yaitu berkisar antara -2 s/d +2 dari hasil perhitungan diperoleh 0,19 dan 1,88 (Lampiran 5) dengan nilai tersebut dapat dikatakan bahwa nilai tersebut menyebar normal. Hasil dari uji Fisher ditunjukan pada Tabel 5. Dalam pengujian statistik ini semua data yang diperoleh dikonversi kedalam bentuk nonlinier yang kemudian data tersebut diuji dengan hipotesis, H0 adalah nilai varian dari kelompok data hasil pengukuran sama dengan nilai varian dari kelompok data kontrol. Dapat dikatakan nilai yang dihasilkan homogen. Sedangkan, H1 adalah nilai varian dari kelompok data hasil pengukuran tidak sama dengan nilai varian dari kelompok data kontrol atau data pembanding (instrumen lain). Dikatakan nilai yang dihasilkan tidak homogen. Sedangkan untuk kriteria pengujian hipotesis diterima H0, jika Fhitung < Ftabel dan ditolak H0, jika Fhitung > Ftabel.
Tabel 5 . Uji homogenitas Fisher
Hasil Pengukuran Bola sphere
21 Hasil Uji Akurasi dan Presisi
Dalam pengujian suatu alat ukur apakah alat tersebut dapat menunjukan nilai atau besaran dari suatu objek diperlukan suatu pengujian yang menggambarkan nilai dan besaran objek tersebut. Nilai suatu objek akan tergambar sebenarnya apabila alat tersebut memiliki akurasi dan presisi yang baik. Akurasi adalah tingkat kedekatan atau kosistensi pengukuran terhadap nilai yang benar (true value), sedangkan presisi adalah tingkat kedekatan pengukuran terhadap nilai rerata (Soeta’at,1996). Presisi dikatakan baik jika jumlah kuadrat dari pengukuran lebih kecil atau sama dengan dari dua kali jumlah kuadrat nilai kontrol, sedangkan akurasi dikatakan baik apabila jumlah kuadrat selisih pengukuran dengan nilai kontrol lebih kecil atau sama dengan dari tiga kali jumlah kuadrat nilai kontol. Berikut Tabel 6. adalah hasil perhitungan untuk uji akurasi dan presisi.
Tabel 6. Hasil uji akurasi dan presisi terhadap bola sphere
Notasi Non_Linier Desibel(dB)
Pada Tabel 6. dapat dilihat bahwa jumlah kuadrat dari pengukuran ( hasil algoritma) yaitu sebesar -47.73 dB lebih kecil dari dua kali jumlah kuadrat kontrol yaitu sebesar -44.60 dB, sehingga dapat dikatakan bahwa alat ini memiliki presisi yang baik. Akurasi dari alat ini menunjukan akurasi yang baik dimana jumlah selisih kuadrat antara hasil pengukuran dan nilai kontrol yaitu sebesar -77.26 dB lebih kecil dari tiga kali jumlah kuadrat nilai kontrol yaitu sebesar -42.84 dB. Dengan adanya pengujian ini dapat disimpulkan bahwa alat dan penerapan algoritma yang digunakan memiliki tingkat akurasi dan presisi yang baik untuk pengukuran.
Rancang Bangun Software Pengolahan
dimodifikasi dikemudian hari, mudah memahami alur dari algoritma yang dibuat dan penggunaanya relatif mudah. Berikut Gambar 8. adalah beberapa tampilan dari software yang telah dikembangkan.
Gambar 8.(a) Tampilan package input di Matlab, (b) input parameter alat, (c) input parameter lingkungan dan pemilihan nilai kecepatan suara
Kadir pada tahun (2012) menyatakan bahwa setiap software pengolahan umumnya dibagi menjadi tiga bagian utama antara lain bagian masukan, bagian pengolahan dan bagian visualisasi (bagian tampilan). Bagian masukan meliputi didalamnya pemanggilan atau pembukaan data, pemisahan data, inisialisasi nilai dan beberapa proses perubahan bentuk agar dapat diakses maupun diterapkan dalam suatu perhitungan. Bagian pengolahan merupakan bagian perhitungan dan penerapan data-data yang dimasukan ke dalam sebuah atau lebih formula sehingga diperoleh suatu keluaran yang dapat divisualisasikan atau dapat diubah dalam bentuk lainya. Bagian visualisasi merupakan bagian tampilan hasil perhitungan suatu formula ataupun algoritma yang ditampilkan dalam bentuk gambar atau bentuk lainya. Sofware yang dikembangkan untuk pengolahan data singel beam
mengikuti kepada tiga bagian utama dalam sebuah software pengolahan dimana untuk bagian masukan pada software ini terdiri dari beberapa inputan dan beberapa bagian inputan pilihan.
23 digunakan dalam bentuk (Hz), durasi pulsa (ms) dan diameter transduser (m) yang digunakan. Karena ketiga parameter ini yang akan menentukan daya jangkau signal di dalam kolom perairan. Gambar 8 bagian (c) terdiri dari dua macam inputan yang pertama dalam bentuk masukan dan yang kedua dalam bentuk pilihan. Masukan pada bagian ini merupakan masukan parameter lingkungan yaitu suhu, salinitas dan PH. Nilai-nilai tersebut dimasukan dalam bentuk angka. Pemilihan penggunaan formula kecepatan suara yang akan digunakan yang terdiri dari 4 pilihan, yang dipilih dengan cara memasukan angka urutan pilihan, yang mana dibagian akhir metode yang digunakan disertakan pula angka hasil dari kuantifikasi parameter lingkungan dan parameter lainya.
Pada software pengolahan data single beam yang diciptakan terdapat dua bagian perhitungan formula yaitu bagian pertama didalam induk program dan bagian kedua diluar induk program. Perhitungan diluar induk program dibuat dalam bentuk function program yang dapat terhubung satu sama lainya dengan kata kunci yang diinisialisasi didalam induk program. Pemisahan beberapa formula menjadi beberapa function program bertujuan agar mempermudah mempelajari, memodifikasi apabila perlu diadakan pengembangan, mempercepat proses pengkuantifikasian program dan mempercepat visualisasi hasil kuantifikasi.
Pembuatan software pengolahan data single beam Cruzpro fishfinder
merupakan tahap selanjutnya dari pengembangan algoritma yang telah diciptakan dimana algoritma tersebut telah di uji secara statistik dan hasil dari uji tersebut diperoleh hasil akurasi dan presisi yang baik terhadap nilai kontrol yang biasanya dalam teknologi hidroakustik acuanya adalah bola sphere (bola keluaran pabrikan yang memiliki tetapan nilai hambur balik akustik).
Pembuatan software pengolahan data diharapkan memudahkan pengguna mengaplikasikanya dalam kegiatan-kegiatan riset berbasis teknologi akustik atau kegiatan lainya yang berguna khususnya untuk memajukan bidang perikanan dan kelautan. Para pengguna software diharapkan dapat mudah mempelajarinya baik dari mulai alur pengolahan hingga proses pengkuantifikasian data hidroakustik.
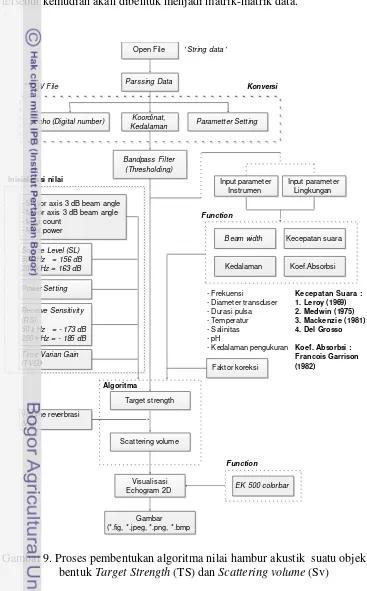
Proses pengolahan data single beam Cruzpro fishfinder dalam bentuk software pengolahan digambarkan pada Gambar 9. gambar tersebut menggambarkan proses pengolahan data dari mulai pemanggilan data, pemisahan data dari bilangan digital number menjadi matrik-matrik data, proses filtrasi, pemasukan beberapa parameter-parameter yang terkait baik dari lingkungan dan alat itu sendiri, proses pengkuantifikasian dengan algoritma yang diciptakan hingga proses visualisasi. Berikut adalah tahapan proses pengolahan data, penerapan algoritma, hingga ke visualisasi dalam sebuah software pengolahan yang dijelaskan pada Gambar 9.
Data hasil akusisi dari software bawaan Cruzpro fishfinder merupakan data bilangan biner 8 bit dengan rentang nilai antara 0-255 atau sering disebut juga dengan istilah data digital number. Data ini termasuk kedalam jenis data ASCII bilangan biner. Pada bahasa pemprograman C++ dalam hal ini matlab, data tersebut dapat diakses atau dipanggil dalam bentuk string data. Di Matlab data
Setelah data digital number dapat diakses oleh matlab kemudian data tersebut akan dilakukan proses pemisahan data (parssing data) yaitu dengan mekanisme pemisahan dengan cara menggunakan fungsi pencarian “fget1” fungsi ini akan mencacah setiap elemen-elemen anggota setiap matrik yang kemudian akan disesuaikan dengan ketentuan yang diberlakukan. Proses ini akan mencacah secara berulang-ulang hingga semua data terpisahkan, data yang terpisahkan tersebut kemudian akan dibentuk menjadi matrik-matrik data.
Gambar 9. Proses pembentukan algoritma nilai hambur akustik suatu objek dalam bentuk Target Strength (TS) dan Scattering volume (Sv)
25
Dalam program ini matrik data yang dibentuk menjadi 3 matrik, yaitu matrik yang berisikan semua nilai hamburbalik yang dihasilkan, matrik posisi dan kedalaman perairan, serta matrik yang berisikan parameter setting alat yang digunakan saat proses akusisi data dilapangan. Matrik-matrik yang dihasilkan, kemudian disimpan dalam bentuk file CSV (Comma Separated Value). Penyimpanan data dalam bentuk tersebut bertujuan supaya data tersebut dapat dengan mudah dilihat atau diekstrak dalam software lain yang sudah familiar seperti Microsoft exell, Notepad dan Workpad. Bentuk file lain yang bisa digunakan pada proses penyimpanan matrik di Matlab antara lain dalam bentuk MAT dan file ASCII lainya.
Data nilai hambur balik dalam bentuk CSV, kemudian diakses dan diolah lebih lanjut dengan menghilangkan gangguan (noise) tersebut menggunakan
bandpass filter. Prinsip kerja filter ini yaitu menyaring atau meloloskan data dalam selang yang telah ditentukan. Mekanisme dari nilai filter ini juga digunakan sebagai cara untuk menapis suatu objek dari objek lainya, hal ini bergantung nilai ambang batas yang digunakan atau sering dikenal dengan istilah sebutan
Threshold. Data hasil filtering dan thresholding kemudian dijadikan sebagai data dasar untuk dikuantifikasi dengan algoritma yang telah diciptakan, hal ini penting dilakukan sesuai yang dikatakan MacCammon (2004) dimana dalam proses kuantifikasi signal akustik hendaknya pengaruh dari lingkungan dan instrumen dihilangkan.
Sebelum melakukan penerapan dan pengkuantifikasian dengan algoritma yang telah diciptakan, terlebih dahulu ada beberapa data-data yang akan diinisialisasikan besaranya. Penginisialisasian nilai ini terkait dengan beberapa nilai bawaan atau spesifikasi dari alat yang digunakan seperti; Source level,
Receiving sensitivity (RS), mayor axis 3dB beam angel, minor axis 3dB beam angel, max count, Time varian gain (TVG), dan power setting. Nilai-nilai tersebut merupakan nilai-nilai yang dihasilkan dari proses pembuatan dan penguji cobaan instrumen dalam skala terkontrol pada umumnya (Waite, 2002). Cara penginisialisasian dilakukan dengan dua cara yaitu pertama dengan cara pembuatan statement nilai dan sebagian menggunakan sistem inputan nilai saat program tersebut dijalankan.
Inputan nilai saat program dijalankan dibagi menjadi dua jenis yaitu, input dari parameter instrumen dan input dari parameter lingkungan. Data yang termasuk kedalam parameter instrumen antara lain, frekuensi, diameter tranduser dan durasi pulsa. Menurut Jensen et al (1994) beberapa parameter yang termasuk kedalam parameter lingkungan adalah suhu, salinitas, derajat keasaman (PH) dan kedalaman pengukuran. Dalam proses pengkuantifikasian dengan algoritma dibutuhkan juga data-data turunan lain yang diturunkan dari data-data yang telah ada. Proses penurunan data-data tersebut dilakukan dengan menggunakan function
dan koefisien absorbsi. Nilai kecepatan suara yang akan digunakan merupakan pilihan dari hasil kuantifikasi function dimana algoritma yang digunakan mengacu kepada beberapa algoritma yang sering digunakan pada saat ini yaitu menurut Leroy (1969), Medwin (1975) dan Mackenzie (1981). Algoritma koefisien absorbsi yang digunakan yaitu menurut Francois (1982).
Komponen yang kemudian akan ditambahkan dalam algoritma adalah adanya penambahan nilai faktor koreksi. Penambahan nilai faktor koreksi ini terjadi karena adanya perbedaan peruntukan bola sphere acuan dalam proses kalibrasi. Spesifikasi alat yang memilliki bola sphere tersebut memiliki frekuensi lebih sebesar 1 KHz dari alat yang akan dibentuk algoritmanya. Hasil dari percobaan dan pengujian secara trial and error diperoleh hasil bahwa faktor koreksi yang dihasilkan nilainya sebanding dengan hasil kali kecepatan suara dengan durasi pulsa kemudian dibagi dua. Dalam bidang hidroakustik nilai ini dikenal dengan jarak minimal pembeda antara suatu objek dengan objek lainya yang saling berdekatan.
Data hasil filtrasi, inisialisasi, fuction dan koreksi, kemudian digabungkan dalam sebuah algoritma kuantifikasi. Keluaran dari algoritma yang diciptakan adalah nilai target strength (suatu nilai yang menunjukan besarnya nilai hambur balik akustik dari sebuah objek), jika diturunkan lebih jauh terbentuknya pola
conical dari pancaran beam yang terbentuk maka terjadilah suatu volume yang tereverbrasi. Besarnya nilai hamburbalik dari satu luasan volume yang tereverbrasi sering disebut dengan istilah Scattering volume. Nilai yang dihasilkan dinyatakan dalam satuan decibel (dB). Nilai hambur balik suatu objek maupun suatu volume digunakan sebagai dasar untuk identifikasi suatu objek, melihat karakteristik suatu objek dan dapat diaplikasikan untuk melihat kelimpahan suatu objek dalam kolom perairan.
Nilai hasil kuantifikasi yang dihasilkan merupakan nilai target strength dan scattering volume yang divisualisasikan dalam bentuk gambar dua dimensi. Keluaran yang dihasilkan merupakan gambar echogram yang tersusun dari tiga nilai utama yaitu ping, kedalaman dan nilai echo hasil kuantifikasi. Dalam pengklasifikasian echo diperlukan pengkodean klasifikasi warna yang umumnya dinyatakan dalam derajat tingkat keabuan (Sutherland, 2007). Nilai tersebut divisualisasikan masing-masing dalam sebuah gambar. Skala warna pada gambar echogram hasil kuantifikasi menggunakan pembagian warna dalam sistem Simrad EK500 yang dinyatakan dalam sebuah function diluar induk program. Gambar yang dihasilkan selanjutnya dapat disimpan atau dikonversi menjadi beberapa ekstensi seperti *.jpeg, *.png dan *.bmp. Secara default jika nilai ini disimpan dengan menggunakan proses penyimpanan biasa akan disimpan dalam bentuk ekstensi *.fig.
Aplikasi terhadap objek dan perbandingan dari hasil alat lain
27 Beberapa objek yang digunakan sebagai uji coba dan pengaplikasian adalah vegetasi lamun, terumbu karang, substrat dasar serta organisme ikan.
Vegetasi lamun
Vegetasi lamun merupakan salah satu bagian penting dari ekosistem pesisir, karena pada ekosistem ini tempat memijah beberapa jenis ikan dan merupakan tempat pengendapan unsur hara terutama masukan dari darat melalui sungai (Kiswara,1994). Lamun di Indonesia terdiri dari tujuh genus dari 12 genus lamun yang ada didunia jenis antara lain Enhalus, Thalassia, Halophila, Cymodocea, Sytingodium, dan Thalassodendron. Penelitian lamun dengan metode akustik sudah banyak dilakukan baik di dalam maupun diluar negeri, salah satu instrumen yang digunakan adalah split beam echosounder Simrad EY60. Perbandingan hasil dari split beam akan dibandingkan dengan hasil pengukuran dari single beam
dalam hal ini data Cruzpro Fishfinder. Jenis lamun yang digunakan sebagai objek perbandingan pada penelitian yaitu jenis Enhalus acoroides, digambarkan pada Gambar 10.
Gambar 10. Vegetasi lamun (Enhalus acroides)
Pengambilan data akustik ini dilakukan secara stasioner (pada satu titik) dilakukan akusisi dalam kurun waktu tertentu. Hasil akusisi kemudian diolah dengan Matlab dalam bentuk package ReadEkraw yang dikembangakan NOAA untuk split beam echosounder Simrad EY60, sedangkan untuk data single beam echosounder Cruzpro diolah dengan menggunakan package yang dikembangkan di Laboratorium Akustik dan Instrumentasi Kelautan. Semua proses akusisi dan pengolahan data masing-masing membutuhkan parameter lingkungan dan parameter alat yang digunakan dalam proses pengkuantifikasianya. Proses ini dilakukan bertujuan untuk meminimalisir pengaruh lingkungan maupun ganguan dari alat itu sendiri dalam proses pengkuantifikasin nilai hambur balik yang dihasilkan. Dari hasil visualisasi program, kemudian dilakukan integrasi area yaitu merata-ratakan nilai dari suatu area tertentu. Banyaknya integrasi area untuk masing-masing data sebanyak 30 sampel (n) dengan nilai yang digunakan adalah nilai Scattering volume (Sv). Dalam proses pengolahan data hambur balik yang dihasilkan perlu diadakanya suatu proses pemisahan data antara nilai sustrat dasar
dari lamun dengan nilai lamun, metode ini bisa dilihat dengan cara melihat echo envelope dari data yang dihasilkan (Falcao, 2010).
Hasil pengukuran pada Gambar 11. diperoleh bahwa kisaran nilai dari instrumen single beam (crp) memiliki nilai kisaran kelas yang jauh lebih sempit dibandingkan dengan split beam. Dengan kisaran kelas yang lebih sempit dapat menandakan semakin spesifik karakteristik nilai hambur dari suatu objek.
Gambar 11. Hasil pengukuran Lamun (Simrad EY 60 dan Cruzpro ) Berikut adalah deskripsi statistik data yang dihasilkan dari kedua pengukuran ditunjukan pada Tabel 7.
Tabel 7. Deskripsi statistik data pengukuran Lamun (Simrad EY 60 dan Cruzpro)
lamun_ey60 lamun_crp
N Valid 30 30
Missing 0 0
Mean -67.4087 -64.4127
Median -68.1600 -64.6500
Std. Deviation 2.33218 2.00725
Variance 5.439 4.029
29 rata-ratanya atau dikenal dengan istilah simpangan baku masing-masing yaitu sebesar 2,33 dB dan 2,00. Nilai varian dari data split beam sebesar 5,439 dan nilai varian dari single beam 4,029. Dari nilai tersebut dapat dikatakan bahwa nilai hasil pengukuran tidak begitu berbeda satu sama lainya baik dengan menggunakan
split beam ataupun dengan single beam oleh karena itu memiliki kemungkinan tingkat homogenitas yang cukup tinggi.
Menguji apakah data dari kedua instrumen tersebut sama, terlebih dahulu kedua kelompok data tersebut memiliki nilai sebaran yang menyebar secara normal. Pada data split beam diperoleh nilai ratio skewness/kurtosis dan Std.Error of skewness / kurtosis masing-masing sebesar 0,63 dan 0,25. Data dari single beam diperoleh nilai ratio tersebut masing-masing 0,66 dan 0,06. Dengan nilai-nilai yang diperoleh dapat dikatakan bahwa nilai-nilai tersebut menyebar normal karena berada pada rentang antara +2 s/d -2.
Pengujian kesamaan varian (homogenitas) menggunakan uji beda rerata dua kelompok data tidak berpasangan. Hasil uji statistika tersebut disajikan pada Lampiran 6 dan Lampiran 7. Perbandingan dua instrumen menggunakan banyaknya data masing-masing sebanyak 30 data dengan standar deviasi hasil pengukuran data single beam sebesar 2,332 dan split beam sebesar 2,007, nilai tersebut menggambarkan penyebaran data terhadap nilai rata-ratanya. Dari hasil tersebut dapat dikatakan nilai hasil pengukuran relatif sempit.
Keluaran hasil uji beda rerata dua kelompok data (tidak saling berpasangan) terlihat nilai rata-rata nilai hambur balik dengan menggunakan
single beam adalah -67,40 dB, sedangkan menggunakan split beam memiliki nilai rata -64,41 dB. Pada Lampiran 7 hasil dari uji-t dapat dilihat bahwa beda rata-rata dari dua kelompok data hasil pengukuran yaitu sebesar 4,045. Dari hasil statistik yang diperoleh bahwa kedua kelompok data yang diperoleh memiliki varian populasi yang identik atau sama, karena probabilitas (tk.signifikansi 5%) dalam hal ini nilai Levene’s test yang diperoleh 2,349 (p=0.131), karena p > 0,05 maka dapat dikatakan data tersebut bersifat homogen. Karena data yang diperoleh bersifat homogen maka yang dilihat pada Lampiran 7 adalah tabel bagian atas
equal variance assumed (data diasumsikan homogen). Nilai t sebesar -4,045, df= 58, (p>0,05) dapat disimpulkan bahwa tidak ada perbedaan nilai hambur balik yang dihasilkan antara single beam dan split beam. Terlihat nilai t negatif menandakan nilai hambur balik yang dihasilkan oleh single beam lebih kecil dari pada yang dihasilkan split beam.Nilai selisih mean yang diperoleh yaitu sebesar -2,996 dengan taraf kepercayaan 95%, rentang selisih nilai hambur balik yang dapat ditoleransi untuk single beam dan split beam yaitu dari 4,12 sampai 1,87. Dengan melihat hasil uji Levene’s test yang homogen antara single beam dan split beam dapat dikatakan bahwa instrumen single beam dapat digunakan dan diterapkan untuk deteksi vegetasi lamun jenis Enhalus acoroides
Terumbu karang