56
DAFTAR PUSTAKA
Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Setiawan,Afrie.2006. 20 aplikasi mikrokontroller ATMEGA8535 &
ATMEGA 16 menggunakan BASCOM -AVR . Yogyakarta: ANDI.
Wardana, Lingga. 2006. Belajar Sendiri Mikrokontroller AVR seri ATmega 8535
simulasi, hardware, dan aplikasi. Penerbit Andi. Yogyakarta.
http://www.academia.edu/5472233/sistem-kran-air-otomatis.html Di akses Pada tanggal 13 Juni 2015
http://www.buletin.melsa.net.id/okt/1020/bahasa-c.html
Di akses Pada tnggal 23 Juni 2015
http://www.fanyludiana.blogspot.com/2014/02/pengujian-sensor-ultrasonik.html Di akses Pada tanggal 27 juni 2015
http://www.freescale.com/datasheets/mpx5100gp Di akses Pada tanggal 16 Juni 2015 http://www.hpinfotech.com
Di akses Pada tanggal 23 juni 2015
http://www.journal.unhas.ac,id/index.php/elen/article/view/675/574.html Di akses Pada tanggal 27 juni 2015
27
BAB III
PERANCANGAN DAN PEMBUATAN
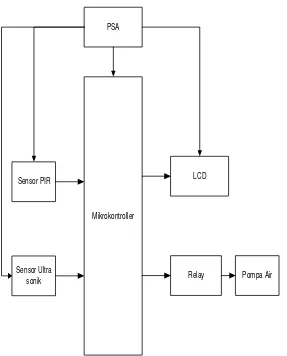
3.1. Diagram Blok Rangkaian
Mikrokontroller
LCD
Relay Pompa Air Sensor PIR
PSA
Sensor Ultra sonik
28 3.1.1 Fungsi Tiap Blok
1. Blok mikrokontroller : Sebagai Pengolah sinyal input – Output. 2. Blok Sensor PIR : Sebagai Pengindera gerak tubuh manusia. 3. Blok Sensor Ultrasonik : Sebagai pendeteksi level air.
4. Blok LCD : Sebagai output tampilan.
5. Blok power supply : Sebagai penyedia tegangan ke system dan Sensor.
6. Blok Relay : Sebagai saklar untuk pompa air. 7. Blok Pompa Air : Sebagai Water Pump.
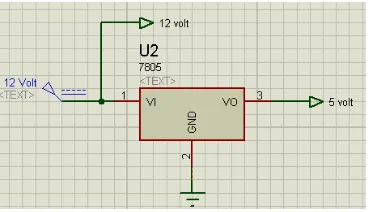
3.2 Rangkaian penstabil tegangan( Regulator)
Rangkaian ini berfungsi untuk memberikan supply tegangan ke seluruh rangkaian yang ada. Keluaran rangkaian Regulator ini yaitu 5 volt, keluaran 5 volt.
Gambar 3.2 Rangkaian regulator
29
apabila PSA dinyalakan. Dan di gandakan output 12 volt. Di gunakan untuk keperluan lain.
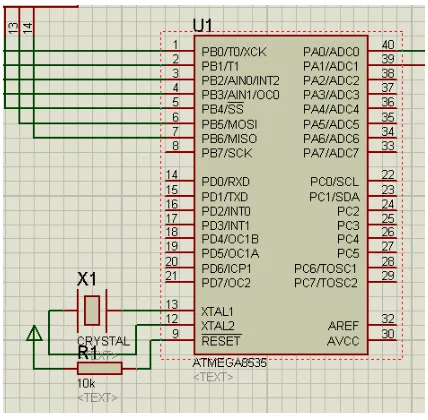
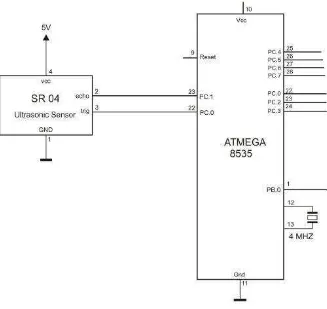
3.3. Rangkaian Mikrokontroller ATMega8535
Rangkaian sistem minimum mikrokontroler ATMEGA8535 dapat dilihat pada gambar 3.3 di bawah ini :
Gambar 3.3Rangkaian sistem minimum mikrokontroler ATMEGA8535
Dari gambar 3.3, Rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
30
(aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke Jack 10 Pin header sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
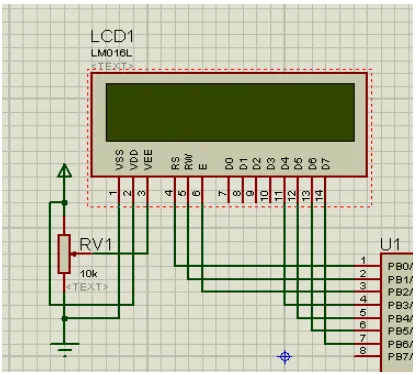
3.4. Perancangan Rangkaian LCD (Liquid Crystal Display)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi
tampilan karakter. Pemasangan potensio sebesar 5 KΩ untuk mengatur kontras
31
Gambar 3.4. Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubung ke PB.0... PB.7, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega8535.
3.5. Rangkaian Relay Pompa air
32
Komponen utama dari rangkaian ini adalah relay. Relay ini memisahkan tegangan rendah dari rangkaian dengan tegangan tinggi dari beban yang dihubungkan dengan sumber tegangan 12 - 24 volt PLN.
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 9 volt, ini berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 9 volt dan negative relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik logam yang mengakibatkan saklar terhubung.
33
dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
3.6. Perancangan Rangkaian Sensor Ultrasonik Ping
Pada rancangan ini menggunakan sensor jarak sensor jarak yaitu sensor ultrasonic. Tipe sensor ultrasonic yaitu SR 04. Cara kerja sensor pada rangkaian adalah sebagai berikut: Sensor akan memancarkan sebuah gelombang ultrasonic dengan frekuensi 40 kHz kemudian sensor akan mendeteksi pantulan gelombang ultrasonic tersebut jika mengenai suatu objek pemantul.
Antara dipancarkan gelombang ultrasonic dengan diterimanya kembali gelombang tersebut terdapat selisih waktu dan dengan mengetahui kecepatan suara kecepatan suara diudara maka dapat dihitung jarak objek dengan sensor. Dengan persamaan:
s = V × ………. 1
Dimana: s = jarak objek dengan sensor
v = kecepatan suara (340 m/s)
34
35
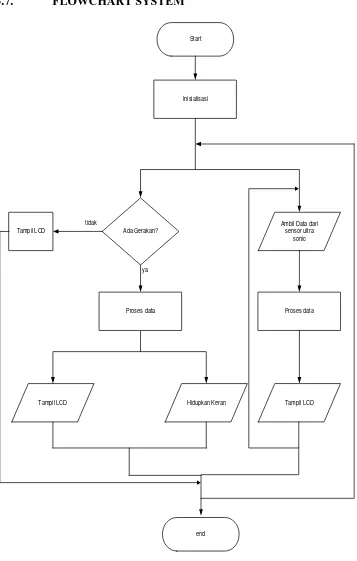
3.7. FLOWCHART SYSTEM
Start
Inisialisasi
Ada Gerakan?
Tampil LCD Hidupkan Keran
Proses data tidak
ya Tampil LCD
Ambil Data dari sensor ultra
sonic
Proses data
Tampil LCD
end
36 BAB IV
HASIL DAN PEMBAHASAN
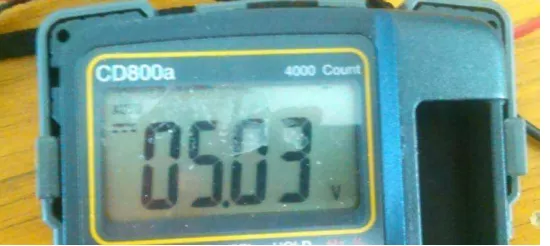
4.1. Pengujian Rangkaian regulator
Pengujian rangkaian regulator ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari output regulator 7805 menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak.
Gambar 4.1. Gambar tegangan output ic regulator 7805 Pada pump menggunakan 12 volt, jadi pada pump air ini tidak perlu menggunakan ic regulator karena outpun dari adaptor sudah 12 volt DC.
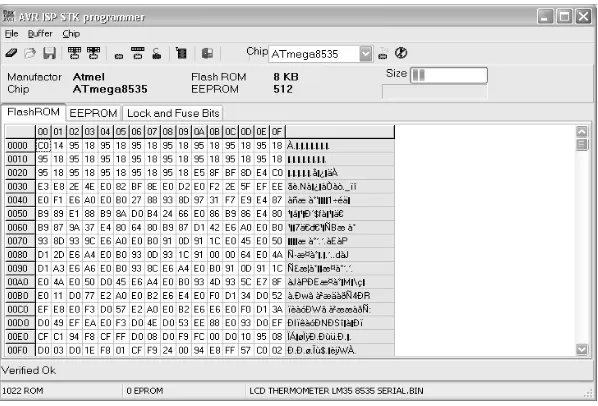
4.2. Pengujian Rangkaian Mikrokontroler ATMega8535
37
Gambar 4.2. Informasi Signature Mikrokontroler
ATMega menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.3. Interfacing LCD 2x16
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan. LCD dihubungkan langsung ke Port D dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.Display karakter pada LCD diatur oleh pin EN, RS dan RW: Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke
LCD, maka melalui program EN harus dibuat logika low “0” dan set ( high ) pada
38
dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan
melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
39
Program di atas akan menampilkan kata “Tes LCD” di baris pertama pada
display LCD 2x16. Pada alat dalam penelitian ini, Saat keseluruhan rangkaian diaktifkan, maka pada LCD akan menampilkan status sensor dan emberitahuan apabila menerima sms .
4.4 Pengujian Rangkaian Relay
Ketika diberikan tegangan 5V pada pin PA.0, maka transistor C945 akan aktif. Hal ini menyebabkan kumparan pada relay K1 dialiri arus listrik. Dengan demikian, kontak K1 akan terhubung. Dioda D1 berfungsi sebagai komponen pengaman transistor arus balik yang mungkin timbul akibat dari aktifnya kumparan relay. Ketika pin JP1 berlogika 0 (0 Volt), maka transistor dalam keadaan tidak aktif, dan kumparan relay tidak dialiri arus listrik. Hal ini akan menyebabkan kontak K1 tidak terhubung.
40 volt sensor ini mendeteksi perubahan suhu pada lingkungan disekitar sensor dan di khususkan pada tubuh manusia dan pendeteksiaan dengan jarak maksimum 5 Meter, dan Jarak ukur dapat di sesuaikan dengan mengatur gain dan vref pada bagian bawah sensor pir.
Pengujian sensor yaitu dengan program sebagai berikut. #include <mega8535.h>
41 (0<<DDA2) | (0<<DDA1) | (1<<DDA0);
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (1<<PORTA0);
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
42
Pengujaian dengan program di atas yaitu, ketika ada gerakan terdeteksi
oleh sensor, maka akan tampil di LCD, dengan tulisan “sensor aktif”, dan
sebalikanya ketika tidak ada terdeteksi gerakan dari sensor LCD akan
menampilkan “sensor non aktif”. Pengujian ini bertujuan untuk mengetahui, aktif
atau tidaknya sensor.
4.6. Pengujian sensor Ultrasonic
43
Konektor SIG adalah sebagai control sensor ini dalam pendeteksian objek sekaligus pembacaan jarak objek dengan sensor ini. Progam dapat mensetting sensor ini dengan jarak yang telah ditentukan sesuai dengan ring deteksi dari sensor ultrasonic ping ini. Ketika sensor disetting jaraknya maka dengan jarak yang telah ditentukanlah sensor akan bekerja dalam pendeteksian objek. Jarak pantulan yang dipakai sensor ultrasonic pada rangkaian ini adalah 30 cm. Langkah selanjutnya adalah memberikan program sederhana pada Sensor Ultrasonik. Program yang diberikan adalah sebagai berikut :
#include <mega8535.h>
#include <delay.h>
#include <stdio.h>
#include <stdlib.h>
#include <alcd.h>
#include <stdio.h>
#define triger PORTA.0
#define pin_triger DDRA.0
#define echo PINA.1
#define pin_echo DDRA.1
44 {
pin_triger=1;// pin TRIGGER
triger=1;
delay_us(10);
triger=0;
pin_echo=0;// pin ECHO
counter = 0;
while (echo==0);
while (echo==1)
{
counter++;
if ( counter > 13000) break;
}
}
4.7. Pengujian Keseluruhan
45 CodeWizardAVR V3.12 Advanced
Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 05/11/2015 Author :
Company : Comments:
Chip type : ATmega8535 Program type : Application
AVR Core Clock frequency: 8.000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 128
*******************************************************/
46 #define relay PORTA.0
#define sensor PINA.1
#define triger PORTC.1 #define pin_triger DDRC.1 #define echo PINC.0 #define pin_echo DDRC.0
unsigned char buff[33]; unsigned int counter,jarak; float volume;
// Alphanumeric LCD functions #include <alcd.h>
// Declare your global variables here
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
47
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (1<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=0
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (1<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
48
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Disconnected // OC1B output: Disconnected // Noise Canceler: Off
49 // Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (0<<CS11) | (0<<CS10);
TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00;
50
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00; OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00); MCUCSR=(0<<ISC2);
// USART initialization // USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization // Analog Comparator: Off
51 // connected to the AIN0 pin
// The Analog Comparator's negative input is // connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
SFIOR=(0<<ACME);
// ADC initialization // ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
// SPI initialization // SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
52
54 lcd_putsf("air mati");
delay_ms(200); }
if (sensor==1) {
relay=1;
lcd_gotoxy(0,1); lcd_putsf("air hidup"); delay_ms(5000); }
55 BAB V PENUTUP 5.1 Kesimpulan
Berdasarkan hasil pengujian, analisis dan hasil perancangan pada aplikasi mikrokontroler untuk otomatis air wudhu ini dapat diambil kesimpulan: Dari desain otomatis kran air wudhu yang telah dibuat, sistem ini mempunyai:
1. Desain pengisi penampung air otomatis yang telah dibuat, sistem ini dapat bekerja sesuai yang dikehendaki dapat mengendalikan pompa air secara otomatis dengan cara mendeteksi gerakan tubuh manusia dan diterima oleh sensor PIR.
2. Pengujian rangkaian regulator yang bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian dengan pengukuran tegangan keluaran dari output regulator 7805 menggunakan multimeter digital. setelah dilakukan pengkukuran maka diperoleh besaran tegangan keluaran sebesar 5 volt.
3. Sensor pir bekerja dengan system high-low dan menghasilkan output 5 volt sensor ini mendeteksi perubahan suhu pada lingkungan disekitar area sensor dan dikhususkan pada tubuh manusia.
5.2 SARAN
1. Untuk kedepannya Alat ini dapat dikembangkan supaya dapat mendeteksi jika kehabisan air didalam wadah penampungan air.
5
BAB II
LANDASAN TEORI
Dalam Bab ini akan membahas tentang komponen- komponen yang di gunakan dalam seluruh unit alat ini. Agar pembahasan tidak melebar dan menyimpang dari topik utama laporan ini, maka setiap komponen hanya di bahas sesuai fungsi nya pada masing- masing unit nya.
2.1 Mikrokontroler ATMega8535
Mikrokontroler dapat dianalogikan sebagai sebuah sistem komputer yang dikemas dalam sebuah chip, artinya di dalam sebuah IC mikrokontroler sebetulnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja, yaitu meliputi mikroprosesor, ROM, RAM, I/O dan clock seperti halnya yang dimiliki oleh sebuah PC. Mengingat kemasannya yang berupa sebuah chip dengan ukuran yang relatif lebih kecil, tentu saja spesifikasi dan kemampuan yang dimiliki oleh mikrokontroller akan menjadi lebih rendah bila dibandingkan dengan sistem komputer seperti PC baik dilihat dari segi kecepatannya. Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja.
6
pada sistem-sistem yang relatif tidak terlalu kompleks atau tidak memerlukan bahan komputasi yang tinggi.
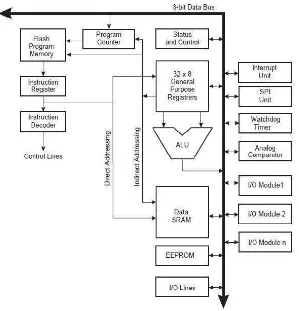
2.1.1 Arsitektur Mikrokontroler AVR ATmega8535
Mikrokontroller AVR merupakan keluarga mikrokontroller RISC (Reduced Instruction Set Computing) keluaran Atmel. Konsep arsitektur AVR pada mulanya dibuat oleh dua orang mahasiswa di Norwegian institute of Technology ( NTH ) yaitu Alf-Egil Bogen dan Vegard Wollan. Mikrokontroler ATMega8535 merupakan salah satu anggota mikrokontroller AVR 8-bit. AVR merupakan mikrokontroller dengan arsitektur Harvard dimana antara kode program dan data disimpan dalam memori secara terpisah. Umumnya arsitektur Havard ini menyimpan kode program dalam memori permanen atau semi-permanen (non Volatille). Sedangkan data disimpan dalam memori tidak permanen (Volatile). ATMega8535 memiliki fitur yang cukup lengkap, mulai dari kapasitas memori program dan memori data yang cukup besar, interupsi, timer/counter, PWM, USART, TWI, analog comparator, EEPROM internal dan juga ADC internal semuanaya ada dalam ATMega8535.
Selain itu kemampuan kecepatan eksekusi yang lebih tinggi menjadi alasan bagi banyak orang untuk beralih dan lebih memilih untuk menggunakan mikrokontroller jenis AVR dari pada pendahulu nya keluarga MCS-51.
7
saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. 32x 8bit register serba guna digunakan untuk mendukung operasi Arithcmetic Logic Unit (ALU) yang dapat dilakukan dalam 1 siklus. 6 dari register serba guna dapat digunakan sebagai 3 buah register pointer 16- bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Hampir semua instruksi AVR ini memiliki format 16-bit(word).
Selain register serba guna terdapat register lain yang tepetakan dengan teknik memori mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk beberapa fungsi khusus antara lain sebagai register kontrol timer/counter, interupsi, ADC, USART, SPI, EEPROM dan Fungsi I/O lainnya. Register-register ini menempati memori pada alamat 0x20h-0x5fh.
8 2.1.2 Fitur ATMega8535
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8535:
1. 130 macam instruksi, yang hampir semuanya dieksekusi dalam satu siklus clock.
2. Kecepatan mencapai 16 MPS dengan clock 16 MHZ. 3. 512 Byte internal EEPROM.
4. 32x8-bit register serba guna.
5. 8 Kbyte Flash memory, yang memiliki fasilitas In-System Programing. 6. 512 Byte SRAM.
7. Programming Lock, fasilitas untuk mengamankan kode program. 8. 4 channel output PWM.
9. 8 channel ADC 10-Bit.
10. 2 Buah timer/counter 8-bit dan 1 buah timer/counter 16-bit. 11. Serial USART.
12. Master/Slave SPI serial interface. 13. Serial TWI atau 12 C.
14. On-Chip Analog comparator.
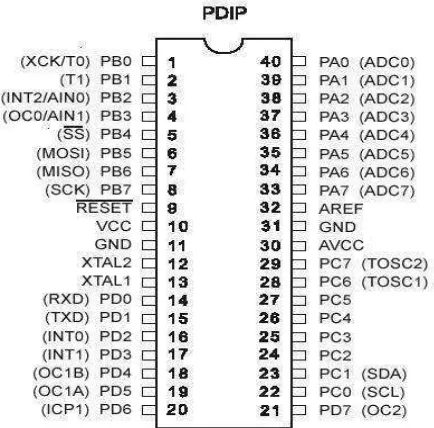
2.1.3 Konfigurasi Pin ATMega8535
Mikrokontroler ATMega8535 memiliki 40 pin untuk model PDIP ditunjukkan pada Gambar 2.2, dan 44 pin untuk model TQFP dan PLCC. Nama-nama pin pada mikrokontroler ini adalah :
9
2. GND merupakan pin ground untuk catu daya digital.
3. Port A (PA0...PA7) merupakan pin I/O 8bit dua arah(bi-directional) dan pin masukan 8 chanel ADC.
4. Port B (PB0 – PB7) merupakan akan pin I/O 8 bit dua arah (bi-directional)dengan resistor pull-up internal dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI.
5. Port C (PC0 – PC7) merupakan pin I/O 8bit dua arah (bi-directional)dan pin fungsi khusus, yaitu TWI, komperator analog, input ADC dan Timer Osilator.
6. Port D (PD0 – PD7) merupakan pin I/O 8 bit dua arah(bi-directional) dan pin fungsi khusus, yaitu komperator analog, interupsi eksternal dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk mereset mikrokontroler.
8. XTAL1 merupakan input ke penguat osilator pembalik dan input ke internal clock.
9. XTAL2 merupakan out put dari penguat oslator pembalik.
10. AVCC merupakan pin masukan tegangan untuk ADC yang terhubung ke portA.
10
Gambar 2.2 Konfigurasi Pin ATMega8535
2.1.4 Deskripsi pin-pin pada mikrokontroler ATMega8535 : 1. Port A
Merupakan 8-bit dua arah bi-directional port I/O,dengan menggunakan resistor pull-up internal dimana setiap pinnya dapat diatur per bit. Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan8 channel ADC. 2. Port B
11
LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output.Selain sebagai port I/O 8 bit port B juga dapat difungsikan secara individu sebagai berikut:
1. PB7: SCK ( SPI Bus Serial Clock)
2. PB6: MISO( SPI Bus Master Input/ Slave Out put) 3. PB5: MOSI( SPI Bus Master Output/Slave Input). 4. PB4: SS (SPI Slave Select Input)
5. PB3: AIN1(Analog Comparator Negatif Input) OC0 (Out put Compare Timer/counter 0)
6. .PB2: AIN0 (Analog Comparator Positif Input) INT2 (External Interrupt 2 Inpt)
7. PB1:T1 (Timer/Counter 1 External Counter Input)
8. PB0:T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Input/Output)
3. Port C
12
atau diisi 1 jika sebagai output. Selain itu, Port C juga difungsikan secara individu sebagai berikut:
1. PC7: TOSC2 (Timer Oscillator 2) 2. PC6: TOSC1 (Timer Oscillator 1) 3. PC1: SDA (Serial Data Input/Output) 4. PC0: SCI (Serial Clock)
4. Port D
Merupakan Port I/O 8-bit dua arah (bi-directional) . Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus sebagai berikut:
1. PD7: OC2 ( Ouput Compare Timer/Counter 1) 2. PD6: ICP1 ( Timer Counter 1 input capture)
3. PD5: OC1A ( Output Compare A Timer /Counter1) 4. PD4: OC1B ( Output Compare B Timer/Counter 1) 5. PD3: INT1 ( External Interrupt 1 Input)
6. PD2: INT0 ( External interrupt 0 Input) 7. PD1: TXD ( USART Transmit)
13 5. RESET
RST pada pin 9 merupakan pin reset yang akan bekerja bira diberi pulsa rendah (aktif Low) selama minimal 1,5us.
6. XTAL2
Merupakan out put dari penguat dari osilator pembalik 7. XTAL1 eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah pin masukan referensi analog untuk ADC. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
10. AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
2.1.5 Peta Memory ATMega8535
14
Gambar 2.3 Organisasi memori ATMega8535
1. Memori Program
ATMega8535 memiliki kapasitas memori program sebesar 8 Kbyte yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing alamat memiliki lebar data sebesar 16 bit.Sehingga organisasi memori program seperti ini sering dituliskan dengan 4K x 16 bit.Memori program ini juga terbagi menjadi dua yaitu program boot dan juga bagian program aplikasi.
2. Memori Data
15
USART, SPI, EEPROM dan port I/O seperti Port A, Port B, Port C, dan Port D. Selanjutnya 512 byte diatasnya digunakan untuk memory data SRAM .
Jika register-register I/O diatas diakses seperti mengakses data pada memori ( Jika kita menggunakan instruksi LD atau ST ) maka register I/O diatas menempati alamat 0020-005F. Tetapi jika register-register I/O diakses seperti mengakses I/O pada umumnya ( menggunakan instruksi IN/ IOUT) maka register I/O diatas menempati alamat memori
Gambar 2.4 (a) Register I/O Sebagai Memori Data, (b) Register I/O sebagai I/O
3. Memori EEPROM
16
EEPROM Data (EEDR) dan register EEPROM control ( EECR). Untuk megakses memory EEPROM ini diperlakukan sperti mengakses data eksternal sehingga waktu dari eksekusi relatif lebih lama dibadingkan jika kita mengakses data dari SRAM.
2.1.6 Register Serba guna ( General Purpose Register)
ATMega8535 memiliki 32 byte register serbaguna yang terletak pada awal alamat RAM. Dari 32 byte register serba guna 6 byte terakhir juga digunakan sebagai register pointer yaitu register pointer X,register pointer Y dan Register pointer Z.
Gambar 2.5 Register Serba guna
2.1.7 USART ( Universal Synchronous and Asynchoronous Serial Receiver
And Transmitter)
Universal Synchronous Serial Receiver and Transmitter (USART) juga
17
USART merupakan komunikasi yang memiliki fleksibilitas yang tinggi, yang dapat kita gunakan untuk melakukan transfer data baik antara mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART. USART memungkinkan transmisi data baik secara synchronous maupun
asynchronous sehingga dengan demikian USART pasti kompatibel dengan
UART.
Pada ATMega8535, pengaturan secara umum pengaturan mode komunikasi baik Synchronous maupun Asynchronous adalah sama, perbedaannya hanya terletak pada sumber clocknya saja. Pada mode Asynchronous masing -masing Peripheral memiliki sumber clock sendiri sedang kan pada mode Synchronous hanya ada satu sumber clock yang digunakan secra bersama- sama. Dengan demikian secara hardware untuk mode Asynchronous hanya membutuhkan 2 pin yaitu TXD dan RXD sedangkan untuk mode Synchronous harus 3 pin yaitu TXD,RXD dan XCK.
2.1.8 Status Register ( SREG)
18
Gambar 2.6 Status Register
Status Register ATMega8535 :
1. Bit 7 – I : Global Interrupt Enable
Bit I digunakan untuk mengaktifkan interrupsi secara umum ( interrupsi global). Jika bit I benilai “1” maka interrupsi secara umum akan aktif , tetapi
jika bernilai “0” maka tidak ada satupun interrupsi yang aktif. Pengaturan
jenis-jenis interrupsi apa sja yang akan aktif dilakukan dengan mengatur register kontrol yang sesuai dengan jenis interrupsi tersebut, dengan terlebih dahulu mengaktifkan interupsi global, yaitu bit I diset ‟1‟.
2. Bit 6 – T : Bit Copy Storage
Bit T digunakan untuk mementukan bit sumber atau bit tujuan pada instruksi bit copy. Pada instruksi BST, data akan dicopy dari register ke bit T ( Bit T sebagai tujuan) sedangkan pada instruksi BLD, bit T akan di copy ke register ( Bit T Sebagai Sumber).
3. Bit 5 – H : Half carry Flag
19 4. Bit 4 – S: Sign bit
Bit S merupakan kombinasi antara bit V dan bit N, yaitu dengan meng-XOR-kan bit V dan bit N.
5. Bit 3 –V : Two‟s Complement over flow flag
Bit V digunakan untuk mendukun operasi aritmatika komplemen 2.Jika terjadi luapan pada operasi aritmatika bilangan komplemen 2 maka akan
menyebabkan bit V bernilai “1”.
6. Bit 2 - N : Negative Flag
Bit N digunakan untuk menunjukkan apakah hasil sebuah operasi aritmatika ataupun operasi logika bernilai negatif atau tidak.Jika hasilnya negatif
maka bit N bernilai “1” dan jika hasilnya bernilai positif maka bit N bernila ‟0”.
7. Bit 1 - Z : Zero Flag
Bit Z digunakan untuk menunjukkan hasil operasi aritmatika ataupun operasi logika apakah bernilai nol atau tidak.Jika hasilnya nol maka bit Z bernilai
“1” dan jika hasilnya tidak nol maka bit Z bernilai‟0”. 8. Bit 0 – C : Carry flag
Bit C digunakan untuk menunjukkan hasil operasi aritmatika ataupun logika apakah ada carry atau tidak.Jika ada carry maka bit C bernilai ‟1” dan jikatidak ada carry maka bit C akan bernilai “0”.
2.2 Infra RED
20
spektroskop cahaya, maka radiasi cahaya infra merah akan nampak pada spectrum
elektromagnet dengan panjang gelombang di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini, maka cahaya infra merah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa atau dapat dideteksi. Infra merah dapat dibedakan menjadi tiga daerah yakni: Near
Infra Red (0.75-1.5 μm), Mid Infra Red (1.50-10 μm), dan Far Infra Red (10-100
μm). Media infra merah ini dapat digunakan baik untuk kontrol aplikasi lain
maupun transmisi data. Sifat-sifat cahaya infra merah: 1. Tidak tampak oleh mata manusia.
2. Tidak dapat menembus materi yang tidak tembus pandang. 3. Dapat ditimbulkan oleh komponen yang menghasilkan panas.
2.3 Sensor dan Tranduser
Sensor merupakan bagian sistem instrumentasi yang dapat memberikan parameter fisik dari suatu besaran yang diukur. Sensor akan menerima input berupa rangsangan fisik, yang kemudian informasi tersebut ditransfer untuk mengaktifkan seluruh sistem. Untuk mengubah informasi yang telah terukur, diperlukan suatu alat (komponen) yang disebut transduser. Tranduser adalah suatu alat yang dapat digerakkan oleh energi yang dapat menyalurkan energi dalam bentuk yang sama atau berlawanan dari satu sistem.
21
perubah dari energi listrik menjadi energi mekanik, karena bila kumparan putar dilalui arus akan timbul gaya elektromagnetik.
2.4 Transistor
Transistor adalah komponen aktif yang menggunakan aliran elektron sebagai prinsip kerjanya di dalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitor, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitor dan basis, dan yang lain antara kolektor dan basis. Adapun simbol dari kedua transistor seperti pada Gambar 2.9 berikut ini:
Gambar 2.7 Simbol Transistor Bipolar (NPN)
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cut off, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cut off. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur karena terlalu besar. BJT akan kondisi (on) jika arus basis (IB) lebih besar dari IC/BJT akan mengalami keadaan menyumbat (off) jika IB = 0.
Cara yang termudah untuk menggunakan sebuah transistor adalah sebagai
switch, artinya transistor dioperasikan pada salah satu dari saturasi atau titik
22
transistor berada dalam keadaan saturasi, transistor tersebut seperti sebuah switch yang tertutup dari kolektor ke emitor. Jika transistor tersumbat (cut-off), transistor seperti sebuah switch yang terbuka. Berikut ini adalah gambar yang menunjukkan rangkaian yang telah dianalisis sampai saat ini.
Gambar 2.8 (a) Rangkaian switching transistor. (b) Biasanya dengan cara ini rangkaian di gambarkan. (c) Contoh dari transistor yang digunakan sebagai
switch. (d) Garis beban dc
2.5 Ultrasonik
23
kerapatan rendah pada fasa gas, cair hingga padat. Ketikagelombang ultrasonik menumbuk suatu penghalang maka sebagian gelombang tersebut akan dipantulkan sebagian diserap dan sebagian yang lain akan diteruskan. Proses ini ditunjukkan pada gambar 2.9.
Gambar 2.9 Fenomena gelombang ultrasonic saat ada penghalang Sensor ultrasonic adalah sebuah sensor yang mengubah besaran fisis (bunyi) menjadi besaran listrik. Secara prinsip modul sensor ultrasonik ini terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Bentuk sensor ultrasonik diperlihatkan pada gambar 2 .10 berikut.
Gambar 2.10 Bentuk sensor ultrasonik
24
mikrokontroler (Pulsa high selama 5μS). Suara ultrasonik dengan frekuensi
sebesar 40KHz akan dipancarkan selama 200μS oleh modul sensor ultrasonik ini.
Suara ini akan merambat di udara dengan kecepatan 344.424m/detik (atau 1cm
setiap 29.034μS) yang kemudian mengenai objek dan dipantulkan kembali ke
modul sensor ultrasonic tersebut. Selama menunggu pantulan sinyal ultrsonik dari bagian trasmiter, modul sensor ultrasonik ini akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan terdeteksi oleh modul sensor ultrasonik. Oleh karena itulah lebar pulsa tersebut dapat merepresentasikan jarak antara modul sensor ultrasonik dengan objek.
2.6 Relay
Relay adalah alat yang dioperasikan dengan listrik yang secara mekanis mengontrol perhubungan rangkaian listrik. Relai adalah bagian terpenting dari banyak sistem kontrol, bermanfaat untuk kontrol jarak jauh dan untuk pengontrolan alat tegangan dan arus tinggi dengan sinyal kontrol tegangan arus rendah. Ketika arus mengalir melalui elektromagnet pada relai control elektromekanis, medan magnet yang menarik lengan besi dari jangkar inti terbentuk. Akibatnya, kontak pada jangkar dan kerangka relai terhubung. Relai dapat mempunyai kontak NO atau kontak NC atau kombinasi dari keduanya.
25
Normally Open (NO), apabila kontak-kontak tertutup saat relay dicatu. Normally Closed (NC), apabila kontak-kontak terbuka saa relay dicatu. Change Over (CO), relay mempunyai kontak tengah yang normal tertutup, tetapi ketika relay dicatu kontak tengah tersebut akan membuat hubungan dengan
kontak-kontak yang lain.
2.7 Saklar Pembatas
Saklar pembatas adalah saklar yang bekerja jika mendapat tekanan. Banyak digunakan dalam pengontrolan otomatis membalik putaran motor, garasi otomatik, sensor roda berjalan. Dalam penggunaaanya dapat dipilih posisi NO maupun NC. Berikut gambar simbolnya dan gambar aslinya:
Gambar 2.12 Saklar Pembatas
26 2.8 Water Pump
Pompa adalah peralatan mekanis berfungsi untuk menaikkan cairan dari dataran rendah ke dataran tinggi. Pada prinsipnya, pompa mengubah energy mekanik motor menjadi energi aliran fluida. Energi yang diterima oleh fluida akan digunakan untuk menaikkan tekanan dan mengatasi tahanan yang terdapat pada saluran yang dilalui. Dalam tugas akhir ini, pompa yang digunakan adalah Water Pump yang difungsikan sebagai penyuplai air kedalam penampung air. Berikut merupakan gambar dari Water Pump :
1 daerah yang kekeringan, akan sangat sulit sekali mendapatkan air sehingga harus membeli dengan harga yang mahal. Pada daerah pegunungan yang jauh dari sumber air, jika ingin mendapatkan air maka harus mengambil air dengan cara mengambil langsung dari sungai atau sumbernya yang harus ditempuh dengan berjalan kaki yang jaraknya berkilo-kilo meter. Mengingat pentingnya air bagi kehidupan manusia maka air harus dihemat penggunaanya. Di dalam kehidupan sehari-hari, sebagian besar orang menggunakan pompa listrik untuk mendapatkan air. Oleh karena itu penggunaan air secara hemat secara tidak langsung akan menghemat pemakaian energi listrik.
2
Dengan alasan itu akan membuat sistem kendali kran air wudhu menggunakan sensor PIR (Passive Infrared Receiver) berbasis mikrokontroler.
Penampung air mempunyai fungsi khusus sebagai tempat menyimpan persediaan air. Pada umumnya, tempat penampung air ini diletakkan di tempat yang tinggi, sehingga dibutuhkan sebuah pompa air untuk mengisinya. Hal ini sering menimbulkan masalah ketika hendak mengisi tempat penampung air tersebut, karena tidak dapat diketahui dengan pasti volume air yang sudah ada di dalam tempat penampung air. Seringkali air yang diisikan sudah melewati batas daya tampung, sehingga banyak air yang terbuang sia-sia. Hal ini tidak hanya menyebabkan pemborosan penggunaan air tetapi juga pemborosan biaya listrik yang harus dikeluarkan untuk mengaktifkan pompa. Oleh karena itu, diperlukan suatu cara agar bisa mengendalikan pompa untuk mengisi tempat penampung air agar penggunaan air lebih efisien.
3 1.2. Rumusan Masalah
Berdasarkan uraian dari latar belakang diatas, rumusan masalah yang dapat diambil secara umum yaitu bagaimana merancang rangkaian aplikasi mikrokontroler untuk otomatisasi kran dan penampung air pada tempat wudhu. Rumusan masalah tersebut dapat dijabarkan sebagai berikut :
1. Bagaimana mendesain otomatisasi kran wudhu?
2. Bagaimana mendesain pengisi tempat penampung air otomatis?
3. Bagaimana kinerja sistem yang dibuat jika dibandingkan dengan sistem yang sudah ada?
1.3. Tujuan Penelitian
Adapun Tujuan dari penulisan tugas akhir ini sebagai berikut : 1. Mendesain pengisi tempat penampung air otomatis. 2. Mengetahui tegangan output pada rangkaian
3. Mengatahui aplikasi pengisian tempat penampungan air otomatis
1.4. Batasan Masalah
Dalam perencanaan penelitian ini terdapat beberapa batasan masalah sebagai berikut:
4
2. Tangan yang dibasuh harus di bawah sensor dan pada sistem ini hanya mampu mengalir deras pada tekanan air yang tinggi.
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat susunan bab – bab yang membentuk laporan ini dalam sistematika penulisan laporan dengan urutan sebagai berikut :
1. Bab I : Menguraikan latar belakang, tujuan, manfaat, batasan masalah, metode penelitian, serta sistematika dari tugas akhir itu sendiri. 2. Bab II : Merupakan sumber-sumber mendasar yang bersifat teoritis sebagai
bahan referensi.
3. BabIII : Membahas mengenai perancangan sistem tiap blok dan keseluruhandari sistem yang bersifat prosedural untuk selanjutnya di analisa.
i
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, dengan limpahan berkat-NYA penyusunan Tugas Akhir ini dapat diselesaikan dalam waktu yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaian Tugas Akhir ini yaitu kepada:
1. Bapak Prof. Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Marpongahtun, M.Sc selaku Pembantu Dekan I Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. 3. Ibu Dr. Susilawati, M.Si selaku ketua Program Studi D-3 Fisika Fakultas
Matematika dan Ilmu Pengetahuan Alam universitas Sumatera Utara. 4. Bapak Junedi Ginting, S.Si M.Si, selaku pembimbing yang telah
membimbing dan mengarahkan kepada penulis dalam menyelesaikan Laporan Tugas Akhir ini.
5. Seluruh Staf Pengajar / Pegawai program studi fakultas MIPA Universitas Sumatera Utara.
6. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa dukungan moril dan materil yang sangat membantu dalam menyelesaikan Laporan Tugas Akhir ini.
7. Senior kami Fathurrahman yang telah memberikan bantuan berupa ilmu dan motivasi dalam menyelesaikan Laporan Tugas Akhir ini.
8. Rekan Fisika Instrumentasi D3 yang memberikan bantuan penulis untuk menyelesaikan Laporan ini.
9. Semua pihak yang turut membantu dalam pengerjakan Laporan Tugas Akhir yang tidak dapat disebutkan satu persatu.
ii ABSTRAK
Jumlah air yang ada di alam adalah tetap, tetapi kebutuhan air bersih meningkat. Terjadinya ketidak seimbangan antara kebutuhan dan suplai air bersih,Upaya yang dapat di lakukan adalah dengan melakukan sebuah penghematan dalam menggunakan air bersih atau dengan kata lain memanfaatkan air sebaik mungkin. Kran umumnya digerakkan secara manual selama ini Oleh setiap aktifitas manusia dengan cara memutar atau menggerakkan kran ke atas atau ke bawah. Dengan memanfaatkan sensor Passive Infrared (PIR) sebagai pendeteksi objek berupa anggota tubuh manusia dan Sensor Ultra Sonic sebagai level tangki air. Penelitian ini penulis akan membuat kran otomatis yang berbasis ATmega 8535 untuk menghidari pemborosan air dalam aktifitas sehari-hari . Hasil penelitian menunjukkan bahwa sensor PIR ini dapat mendeteksi objek dalam jarak maksimum 15 cm. Dari hasil perbandingan menggunakan kran manual dan kran otomatis terjadi selisih 20% lebih hemat menggunakan kran otomatis dari pada menggunakan kran manual. Penggunaan sensor PIR pada penelitian ini memiliki sensitifitas sangat rendah, dimana pembacaan sensor ini harus tepat dengan objek, jika objek tidak sesuai maka sensor tesebut tidak dapat berkerja.
SISTEM OTOMATIS ON/OFF KRAN DAN LEVEL TANGKI
AIR MENGGUNAKAN BAHASA C BERBASIS ATMEGA8535
TUGAS AKHIR
TEUKU HENRY KURNIAWAN
122408004
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM UNIVERSITAS SUMATRA UTARA
SISTEM OTOMATIS ON/OFF KRAN DAN LEVEL TANGKI
AIR MENGGUNAKAN BAHASA C BERBASIS ATMEGA8535
TUGAS AKHIR
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat Memperoleh Ahli Madya
TEUKU HENRY KURNIAWAN
122408004
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM UNIVERSITAS SUMATRA UTARA
PERSETUJUAN
Judul : Sistem Otomatis ON/OFF Kran Dan Level Tangki Air Menggunakan Bahasa C Berbasis ATMega8535.
Kategori : Tugas Akhir
Nama : Teuku Henry Kurniawan
NIM : 122408004
Program Studi : Fisika D-III
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatra Utara
Disetujui di Medan, Juni 2015
Disetujui Oleh
Ketua Program Studi Pembimbing,
( Dr. Susilawati, M.Si ) (Junedi Ginting, S.Si M.Si )
PERNYATAAN
SISTEM KRAN AIR OTOMATIS MENGGUNAKAN SENSOR PIR (PASSIVE INFRA RED) BERBASIS ATMEGA8535
TUGAS AKHIR
Saya mengakui bahwa tugas Akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni 2015
i
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, dengan limpahan berkat-NYA penyusunan Tugas Akhir ini dapat diselesaikan dalam waktu yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaian Tugas Akhir ini yaitu kepada:
1. Bapak Prof. Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Marpongahtun, M.Sc selaku Pembantu Dekan I Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. 3. Ibu Dr. Susilawati, M.Si selaku ketua Program Studi D-3 Fisika Fakultas
Matematika dan Ilmu Pengetahuan Alam universitas Sumatera Utara. 4. Bapak Junedi Ginting, S.Si M.Si, selaku pembimbing yang telah
membimbing dan mengarahkan kepada penulis dalam menyelesaikan Laporan Tugas Akhir ini.
5. Seluruh Staf Pengajar / Pegawai program studi fakultas MIPA Universitas Sumatera Utara.
6. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa dukungan moril dan materil yang sangat membantu dalam menyelesaikan Laporan Tugas Akhir ini.
7. Senior kami Fathurrahman yang telah memberikan bantuan berupa ilmu dan motivasi dalam menyelesaikan Laporan Tugas Akhir ini.
8. Rekan Fisika Instrumentasi D3 yang memberikan bantuan penulis untuk menyelesaikan Laporan ini.
9. Semua pihak yang turut membantu dalam pengerjakan Laporan Tugas Akhir yang tidak dapat disebutkan satu persatu.
ii ABSTRAK
Jumlah air yang ada di alam adalah tetap, tetapi kebutuhan air bersih meningkat. Terjadinya ketidak seimbangan antara kebutuhan dan suplai air bersih,Upaya yang dapat di lakukan adalah dengan melakukan sebuah penghematan dalam menggunakan air bersih atau dengan kata lain memanfaatkan air sebaik mungkin. Kran umumnya digerakkan secara manual selama ini Oleh setiap aktifitas manusia dengan cara memutar atau menggerakkan kran ke atas atau ke bawah. Dengan memanfaatkan sensor Passive Infrared (PIR) sebagai pendeteksi objek berupa anggota tubuh manusia dan Sensor Ultra Sonic sebagai level tangki air. Penelitian ini penulis akan membuat kran otomatis yang berbasis ATmega 8535 untuk menghidari pemborosan air dalam aktifitas sehari-hari . Hasil penelitian menunjukkan bahwa sensor PIR ini dapat mendeteksi objek dalam jarak maksimum 15 cm. Dari hasil perbandingan menggunakan kran manual dan kran otomatis terjadi selisih 20% lebih hemat menggunakan kran otomatis dari pada menggunakan kran manual. Penggunaan sensor PIR pada penelitian ini memiliki sensitifitas sangat rendah, dimana pembacaan sensor ini harus tepat dengan objek, jika objek tidak sesuai maka sensor tesebut tidak dapat berkerja.
iii
2.1. Mikrokontroller ATmega8535 5
2.1.1. Arsitektur Mkrokontroler AVR ATmega8535 6
2.1.2. Fitur ATmega8535 8
2.1.3. Konfigurasi Pin ATmega8535 8
2.1.4. Deskripsi pin-pin pada Mikrokontroler ATmega8535 10
2.1.5. Peta Memory ATMega8535 13
2.1.6. Register Serba guna ( General Purpose Register) 16
2.1.7 USART 16
BAB III. PERANCANGAN DAN PEMBUATAN 27
3.1. Diagram Blok Rangkaian 27
3.1.1. Fungsi Tiap Blok 28
3.2. Rangkaian Penstabil Tegangan(Regulator) 28
3.3. Rangkaian Mikrokontroler ATmega8535 29
3.4. Perancangan Rangkaian LCD 30
3.5. Rangkaian Relay Pompa Air 31
3.6. Perancangan Rangkaian Sensor Ultrasonik Ping 33
iv
BAB IV. HASIL DAN PEMBAHASAN 36
4.1. Pengujian Rangkaian Regulator 36
4.2. Pengujian Rangkaian Mikrokontroller Atemga8535 36
4.3. Intefacing LCD 2 x 16 37
4.4. Pengujian Rangkaian Relay 39
4.5. Pengujian Sensor PIR 40
4.6. Pengujian Sensor Ultrasonic 42
4.7. Pengujian Keseluruhan 44
BAB V. PENUTUP 55
5.1. Kesimpulan 55
5.2. Saran 55
DAFTAR PUSTAKA LAMPIRAN
v
DAFTAR GAMBAR
Gambar 2.1 Arsitektur ATMega 8535 7
Gambar 2.2 Konfigurasi Pin ATMega8535 10
Gambar 2.3 Organisasi memori ATMega8535 14
Gambar 2.4 (a) Register I/O Sebagai Memori Data 15
(b) Register I/O sebagai I/O 15
Gambar 2.5 Register Serba guna 16
Gambar 2.6 Status Register 18
Gambar 2.7 NPN 21
Gambar 2.8 Rangkaian Switching Transistor 22
Gambar 2.9 Fenomena gelombang ultrasonic saat ada penghalang 23
Gambar 2.10 Bentuk Sensor Ultrasonik 23
Gambar 2.11 Simbol Relay 24
Gambar 2.12 Saklar Pembatas 25
Gambar 2.13 Water Pump 26
Gambar 3.1 Diagram Blok 27
Gambar 3.2 Rangkaian Regulator 28
Gambar 3.3 Rangkaian system minimum mikrokontroller
Atemega8535 29
Gambar 3.4 Rangkaian LCD 31
Gambar 3.5 Skematik Rangkaian Relay 31
Gambar 3.6 Rangkaian Skematik Sensor Ultrasonik PING 34
Gambar 3.6 Sistem Flowchart 35
Gambar 4.1 Tegangan Output IC Regulator 7805 36