SISTEM PENGONTROLAN LEVEL KETINGGIAN AIR SECARA OTOMATIS MENGGUNAKAN MIKROKONTROLER
ATMEGA8535 DENGAN SENSOR ULTRASONIK
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Ahli Madya
AHMAD NAWAWI HARAHAP 082408009
PROGRAM STUDI D-III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : SISTEM PENGONTROLAN KETINGGIAN AIR SECARA OTOMATIS MENGGUNAKAN
MIKROKONTROLER ATMEGA8535 DENGAN SENSOR ULTRASONIK Kategori : LAPORAN TUGAS AKHIR
Nama : AHMAD NAWAWI HARAHAP Nomor Induk Mahasiswa : 082408009
Program Studi : DIPLOMA (D3) FISIKA INSTRUMENTASI Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, 06 Juni 2011
Komisi Pembimbing :
Diketahui/Disetujui oleh
Program Studi Fisika Instrumentasi Pembimbing, Ketua,
PERNYATAAN
SISTEM PENGONTROLAN LEVEL KETINGGIAN AIR SECARA OTOMATIS MENGGUNAKAN MIKROKONTROLER
ATMEGA8535 DENGAN SENSOR ULTRASONIK
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya
Medan, 06 Juni 2011
PENGHARGAAN
Puji dan Syukur Penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang dengan limpah karunia-NYA, sehingga penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
ABSTRAK
DAFTAR ISI
1.4 Sistematika Penulisan...2
BAB II LANDASAN TEORI 2.1 Mikrokontroler ATMega8535...4
2.1.1 Kontruksi ATMega8535...6
2.1.2 Pin-Pin Pada Mikrokontroler ATMega8535...8
2.7.2 Dioda Penyearah (Rectifier)...27
2.7.3 Dioda Zener...28
2.7.4 Dioda Cahaya (LED : Light Emitting Dioda)...28
2.8 Relay...29
2.9 Sensor Jarak Ultrasonik PING...30
BAB III SISTEM KERJA RANGKAIAN 3.1 Diagram Blok...34
3.2 Rangkaian Mikrokontroler ATMega8535...35
3.3 Rangkaian Power Supplay (PSA)...36
3.4 Rangkaian Relay Pengendali Pompa Air...37
3.5 Saklar...39
3.6 Sensor Ultrasonik Ping...40
3.6.1 Prinsip Kerja Pemancar Ultrasonik (Transmitter)...42
3.6.2 Prinsip Kerja Penerima Ultrasonik (Receiver)...43
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Pengujian Rangkaian Mikrokontroller ATMega8535...44
4.2 Pengujian Rangkaian Power Supplay (PSA)...45
4.3 Pengujian Rangkaian Relay...46
4.4 Pengujian Sensor Ultrasonik PING...47
4.5 Dta Analisa Pengukuran Jarak Ketinggian Air...49
4.6 Diagram Alir (Flowchart)...54
DAFTAR TABEL
Halaman Tabel 2.4 Gelang Resistor 13
Tabel 2.5 Nilai Kapasitor 19
DAFTAR GAMBAR
Halaman
Gambar 2.1 Konfigurasi IC Mikrokontroller ATMega8535 8
Gambar 2.2 Blog Diagram IC ATMega8535 9
Gambar 2.3 Bentuk Fisik Transformator 11
Gambar 2.4 Fluks Pada Transformator 12
Gambar 2.5 Resistor Karbon 13
Gambar 2.6 Potensiometer 15
Gambar 2.7 Grafik Perubahan Nilai pada Potensiometer 15
Gambar 2.8 Skema Kapasitor 16
Gambar 2.9 Electrolytic Capacitor (ELCO) 18
Gambar 2.10 Ceramic Capasitor 19
Gambar 2.11 Simbol Tipe Transistor 21
Gambar 2.12 Transistor sebagai Saklar ON 23 Gambar 2.13 Karakteristik Daerah Saturasi Pada Transistor 24 Gambar 2.14 Transistor Sebagai Saklar OFF 25
Gambar 2.15 Simbol Dioda 26
Gambar 2.16 Sifat Dioda Bias Maju dan Bias Mundur 27 Gambar 2.17 Dioda Penyearah Yang Diberi Arus Bolak Balik (AC) 28
Gambar 2.18 Simbol Dioda Zener 28
Gambar 2.19 Simbol Dioda Cahaya ( LED ) 29
Gambar 2.20 Simbol Relay dan Rangkaian Driver 30 Gambar 2.21 Sensor jarak ultrasonik ping 31
Gambar 2.22 Instalasi Sensor Ping 31
Gambar 2.23 Diagram Waktu Sensor Ping 32
Gambar 2.24 Jarak Ukur Sensor Ping 32
Gambar 3.1 Diagram Blok 34
Gambar 3.6 Prinsip Pemantulan Sensor Ultrasonik 41 Gambar 3.7 Pemancar Ultrasonik Transmitter 42 Gambar 4.1 Rangkaian Power Supplay (PSA) 46
Gambar 4.2 Pengujian Rangkaian Relay 47
PENGHARGAAN
Puji dan Syukur Penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang dengan limpah karunia-NYA, sehingga penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
ABSTRAK
BAB I PENDAHULUAN
1.1.Latar Belakang
Perkembangan teknologi informatika semakin hari semakin bertambah maju. Dalam
dunia industri, informatika memegang peranan penting dalam proses produksi. Seiring
dengan lajunya percepatan teknologi, membuat banyak orang menjadi termotifasi
untuk membuat sesuatu hal yang baru, sesuatu yang dapat dikendalikan secara
otomatis dengan menggunakan suatu sistem yang mudah dioperasikan. Pada
kenyataannya, informatika juga dapat mengurangi beban pemerintah dalam hal
penghematan energi listrik, dengan alat-alat yang dapat menghemat listrik atau pun
sumber daya lainnya seperti penghematan air bila dipadukan dengan sedikit rangkaian
elektronika.
Contohnya dalam hal, pengisian penampung air yang dapat menghemat air
dan listrik. Apalagi pada zaman sekarang ini, dimana pemerintah menghimbau
kepada setiap masyarakat untuk dapat lebih berhemat terutama energi listrik dan
menghemat air. Dengan latar belakang itulah, penulis memilih judul “Sistem
Pengontrolan Level Ketinggian Air Secara Otomatis Menggunakan Mikrokontroler
ATMega8535 Dengan Sensor Ultrasonik”. Dengan sistem ini, kita tidak perlu
khawatir terhadap penampung air dirumah kita. Ketika sistem diaktifkan, dimana
dalam hal ini sistem pengisian air akan aktif, maka pengontrolan terhadap penampung
tangki air sudah penuh atau belum. Dengan demikian pemilik rumah sudah dapat
menghemat air, listrik dan waktu.
1.2.BATASAN MASALAH
Untuk membahas persoalan agar sesuai dengan tujuan, maka penulis membatasi
pembahasan Tugas Akhir. Adapun yang menjadi batasan masalah adalah sebagai
berikut :
1. Hanya membahas prinsip kerja untuk Sistem Pengontrolan Level Ketinggian
Air Secara Otomatis Menggunakan Mikrokontroler ATMega8535 Dengan
Sensor Ultrasonik.
2. Pembahasan pada hardware dan software komputer terbatas kepada
penggunaannya dalam rangkaian dan tidak dibahas secara rinci.
3. Alat uji ini hanya dapat menguji ketinggian air pada tangki penyimpanan air
secara otomatis menggunakan Atmega8535 dengan sensor ultrasonik.
1.3.TUJUAN PENULISAN
Adapun tujuan penulisan Tugas Akhir ini adalah membuat sebuah Sistem
Pengontrolan Level Ketinggian Air Secara Otomatis Menggunakan Mikrokontroler
ATMega8535 Dengan Sensor Ultrasonik. Mempermudah dalam pengisian air, karena
pada pengisiannya dilakukan secara otomatis dengan sensor ultrasonik. Dengan sistem
ini kita tidak perlu khawatir terhadap penampungan air dirumah kita dan dapat
1.4.SISTEMATIKA PENULISAN
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja dari Sistem Pengontrolan
Level Ketinggian Air Secara Otomatis Menggunakan Mikrokontroler ATMega8535
Dengan Sensor Ultrasonik, maka penulis menulis laporan ini sebagai berikut :
BAB I PENDAHULUAN
Dalam Bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan
masalah, serta sistematika penulisan.
BAB II LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang
digunakan untuk pembahasan dan cara kerja dari rangkaian Teori pendukung
itu antara lain tentang mikrokontroler ATmega8535 (hardware dan software),
bahasa program yang digunakan, serta karekteristik dari komponen-komponen
pendukung.
BAB III SISTEM KERJA RANGKAIAN
Pada bab ini akan dibahas sistem kerja rangakian, yaitu diagram blok dari
BAB IV ANALISA DAN PENGUJIAN ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan pengujian alat,
penjelasan mengenai rangkaian – rangkaian yang digunakan, penjelasan
mengenai program yang diisikan ke mikrokontroler Atmega8535.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang
dilakukan dari tugas akhir ini serta saran apakah rangkaian ini dapat dibuat lebih
efisien dan dikembangkan perakitannya pada suatu metode lain yang mempunyai
BAB II
LANDASAN TEORI
2.1 Mikrokontroler ATMega8535
Mikrokontroler, sebagai suatu terobosan teknologi mikrokontoler dan mikrokomputer,
hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi
baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak
namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam
jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosesor).
Sebagai kebetuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan
para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih
canggih.
Ilustrasi yang mungkin bisa memberikan gambaran yang jelas dalam
penggunaan mikrokontroler adalah aplikasi mesin tiket dalam arena permainan yang
saat ini terkenal di Indonesia. Jika kita sudah selesai bermain, maka akan diberikan
suatu nilai, nilai inilah yang menentukan berapa jumlah tiket yang bisa diperoleh dan
jika dikumpulkan dapat ditukar dengan berbagai macam hadiah. Sistem tiket ini
ditangani dengan mikrokontroler, karena tidak mungkin menggunakan computer PC
yang harus dipasang disamping (atau di belakang) mesin permainan yang
bersangkutan.
Selain system tiket, kita juga dapat menjumpai aplikasi mikrokontroler dalam
bidang pengukuran jarak jauh atau yang dikenal dengan system telemetri. Misalnya
jika dipasang suatu system pengukuran yang bisa mengirimkan data lewat pemancar
dan diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya.
Sistem pengukuran jarak jauh ini jelas membutuhkan suatu system akusisi data
sekaligus system pengiriman data secara serial (melalui pemancar), yang semuanya itu
bisa diperoleh dari mikrokontroler yang digunakan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya),
mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan
lainnya terletak pada perbandingan RAM dan ROM-nya. Pada system computer
perbandingan RAM dan ROM-nya besar, artinya program-program pengguna
disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antarmuka
perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada
mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
control disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang
ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat
penyimpanan sementara, termasuk register-register yang digunakan pada
mikrokontroler yang bersangkutan.
Mikrokontroler ATMega8535 merupakan salah satu keluarga dari MCS-51
keluaran Atmel. Jenis Mikrokontroler ini pada prinsipnya dapat digunakan untuk
mengolah data per bit ataupun 8 bit secara bersamaan. Pada prinsipnya program pada
Mikrokontroler dijalankan bertahap, jadi pada program itu sendiri terdapat beberapa
Beberapa fasilitas yang dimiliki oleh Mikrokontroler ATMega8535 adalah
sebagai berikut :
a. Sebuah Central Processing Unit 8 bit.
b. Osilatc : Internal dan rangkaian pewaktu.
c. RAM internal 128 byte.
d. Flash Memory 2 Kbyte.
e. Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah
interupsi internal).
f. Empat buah programmable port I/O yang masing – masing terdiri dari
delapan buah jalur I/O.
g. Sebuah port serial dengan control serial full duplex UART.
h. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika.
Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada frekuensi 12
MHz.
2.1.1 Kontruksi ATMega8535
Mikrokontrol ATMega8535 hanya memerlukan 3 tambahan kapasitor,1 resistor dan 1
kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 KiloOhm
dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini
ATMega8535 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan
frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi
rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja
mikrokontroler. Memori merupakan bagian yang sangat penting pada mikrokontroler.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori
penyimpanan progam ini dinamakan sebagai memori program.
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai
untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan progam yang sudah
baku dan diproduksi secara massal, progam diisikan ke dalam ROM pada saat IC
mikrokontroler dicetak di pabrik IC. Untuk keperluan tertentu mikrokontroler
mengunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang
disingkat menjadi PEROM atau PROM. Dulu banyak dipakai UV-EPROM (Ultra
Violet Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk Memori Program ATMega8535 adalah Flash
PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat
bantuan alat yang dinamakan sebagai ATMega8535 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip ATMega8535 sebesar 128 byte,
meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah
cukup.
Sarana Input/Ouput yang disediakan cukup banyak dan bervariasa.
ATMega8535 mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal
ATMega8535 dilengkapi UART (Universal Asyncronous Receiver/ Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD) diletakan berhimpitan dengan P1.0 dan P1.1 di
kaki nomor 2 dan 3, sehingga kalau sarana input/ouput yang bekerja menurut fungsi
waktu. Clock penggerak untaian pencacah ini bisa berasal dari oscillator kristal atau
clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1 berhimpitan dengan P3.4
dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/ouput parelel
kalau T0 dan T1 dipakai.
ATMega8535 mempunyai enam sumber pembangkit interupsi, dua
diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua
kaki ini berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur
input/output parelel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran
ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535
dapat dikonfigurasi, baik secara single ended input maupun differential input. Selain
itu, ADC ATmega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode
operasi, dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah
disesuaikan dengan kebutuhan ADC itu sendiri.
Port1 dan 2, UART, Timer 0,Timer 1 dan sarana lainnya merupakan register
yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Functoin
2.1.2 Pin-Pin Pada Mikrokontroler ATMega8535
Deskripsi pin-pin oada Mikrokontroler ATMega8535 :
Gambar 2.1 Konfigurasi IC Mikrokontroller ATMega8535
Penjelasan Pin
VCC : Tegangan Supplay (5 volt)
GND : Ground
RESET : Input reset level rendah pada pin ini selama lebih dari
panjang pulsa minimum akan menghasilkan reset,
walaupun clock sedang berjalan.
XTAL1 : Input penguat osilator inverting dan input pada rangkaian
operasi clock internal.
XTAL2 : Output dari penguat osilator inverting.
AVCC : Pin tegangan suplay untuk port A dan ADC. Pin ini harus
dihubungkan ke VCC walaupun ADC tidak digunakan,
filter.
AREF : Pin referensi tegangan analaog untuk ADC.
Gambar 2.2 Blog Diagram IC ATMega8535
a. Port A (PA0-PA7)
Port A berfungsi sebagai input analog ke ADC. Port A juga dapat
berfungsi sebagai port I/O 8 bit bidirectional, jika ADC tidak digunakan
maka port dapat menyediakan resistor pull-up internal
(dipilih untuk setiap bit).
b. Port B (PB0-PB7)
Port B merupakan I/O 8 bit biderectional dengan resistor pull-up
internal (dipilih untuk setiap bit) c. Port C (PC0-PC7)
Port C merupakan I/O 8 bit biderectional dengan resistor pull-up
d. Port D (PD0-PD7)
Port D merupakan I/O 8 bit biderectional dengan resistor pull-up
internal (dipilih untuk setiap bit)
2.2 EEPROM ATMega8535
Mikrokontroler ATMega8535 memiliki EEPROM sebesar 2 Kbyte untuk tempat
penyimpanan data dan 256 byte memory Ram. 128 byte dari memory tersebut
menempati ruang sejajar dengan register fungsi khudud. Hal ini berarti memory yang
128 byte tersebut memiliki alamat yang sama tetapi beda pada ruang yang terpisah
dengan SFR.
Bila suatu perintah diperlukan menuju alamat memory dengan alamat di atas
7FH, maka diperlukan mode pengalamatan yang berbeda sehingga CPU dapat menuju
RAM atau menuju memory. Sebagai contoh, perintah pengalamatan langsung berikut
akan menuju SFR dengan alamat 0A0H, yaitu P2. Mov 0A0H,#data. Sementara
perintah yang untuk menuju memory dengan alamat 0A0H dikerjakan dengan cara
pengalamatan tidak langsung, memory akan dituju buka alamat P2. Mov @R0.#data.
Dalam hal ini, operasi stack adalah contoh untuk pengalamatan tidak langsung,
sehingga memory dengan alamat di atas 128 pada RAM tersedia untuk keperluan
stack.
Demikian juga dengan EEPROM yang ada pada ATMega8535, data pada
memori tersebut diset dengan memberikan nilai logika 1 pada bit EEMEM, yaitu bit
pada register WMCOM pada alamat SFR dengan nilai lokasi 96H. EEPROM
alamat tersebut di atas digunakan MOVX, sementara untuk mencapai data dengan
alamat terdebut di atas digunakan perintah yang sama tetapi dengan mengatur nilai
EEMEN dengan logika LOW.
Selama penulisan ke EEPROM dapat juga dilakukan pembacaan tetapu harus
dimulai dari bit MSB, sekali penulisan telah selesai data yang benar telah tersimpan
dengan baik pada lokasi memori EEPROM tersebut.
2.3 Transformator
Transformmator atau trafo adalah komponen elektromagnet yang dapat mengubah
taraf suatu tegangan AC ke taraf yang lain. Adaptor AC-DC merupakan piranti yang
menggunakan transformator step-down.
Gambar 2.3 Bentuk Fisik Transformator
Transformator bekerja berdasarkan prinsip induksi elektromagnetik. Tegangan
masukan bolak-balik yang membentangi primer menimbulkan fluks magnet yang
idealnya semua bersambung dengan lilitan sekunder. Fluks bolak-balik ini
menginduksikan GGL dalam lilitan sekunder. Jika efisiensi sempurna, semua daya
Gambar 2.4 Fluks Pada Transformator
2.4 Resistor
Resistor komponen pasif elektronika yang berfungsi untuk membatasi arus listrik yang
mengalir. Berdasarkan kelasnya resistor dibagi menjadi 2 yaitu : Fixed Resistor dan
Variable Resistor Dan umumnya terbuat dari carbon film atau metal film, tetapi tidak
menutup kemungkinan untuk dibuat dari material yang lain.
Pada dasarnya semua bahan memiliki sifat resistif namun beberapa bahan
tembaga perak emas dan bahan metal umumnya memiliki resistansi yang sangat kecil.
Bahan – bahan tersebut menghantar arus listrik dengan baik, sehingga dinamakan
konduktor. Kebalikan dari bahan yang konduktif, bahan material seperti karet, gelas,
karbon memiliki resistansi yang lebih besar menahan aliran elektron dan disebut
sebagai insolator.
2.4.1 Fixed Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah
arus yang mengalir dalam satu rangkaian. Sesuai dengan namanya resistor bersifat
resistif dan umumnya terbuat dari bahan karbon. Tipe resistor yang umum berbentuk
tabung porselen kecil dengan dua kaki tembaga dikiri dan kanan. Pada badannya
terdapat lingkaran membentuk gelang kode warna untuk memudahkan pemakai
mengenali besar resistansi tanpa mengukur besarnya dengan ohm meter. Kode warna
tersebut adalah standar menufaktur yang dikeluarkan oleh EIA (Electronic Industries
Resistansi dibaca dari warna gelang yang paling depan ke arah gelang toleransi
berwarna coklat, emas, atau perak. Biasanya warna gelang toleransi ini berada pada
bahan resistor yang paling pojok atau juga dengan lebar yang lebih menonjol,
sedangkan warna gelang yang keempat agak sedikit ke dalam. Dengan demikian
pemakai sudah langsung mengetahui berapa toleransi dari resitor tersebut. Kalau anda
telah bisa menentukan mana gelang pertama selanjutnya adalah membaca nilai
resistansinya.
Biasanya resistor dengan toleransi 5%, 10% atau 20% memiliki gelang (tidak
termasuk gelang toleransi). Tetapi resistor dengan toleransi 1% atau 2% (toleransi
kecil) memiliki 4 gelang (tidak termasuk gelang toleransi). Gelang pertama dan
seterusnya berturut-turut menunjukkan besar nilai satuan, dan gelang terakhir adalah
faktor penggalinya.
2.4.2 Variable Resistor
Untuk kelas resistor yang kedua ini terdapat 2 tipe. Untuk tipe pertama dinamakan
variable resistor dan nilainya dapat diubah sesuai keinginan dengan mudah dan sering
digunakan untuk pengaturan volume, bass, balance, dll. Sedangkan yang kedua adalah
semi-fixed resistor. Nilai dari resistor ini biasanya hanya diubah pada kondisi tertentu
saja. Contoh penggunaan dari semi-fixed resistor adalah tegangan referensi yang
digunakan untuk ADC, fine tune circuit, dll. Ada beberapa model pengaturan nilai
untuk mendapatkan semua nilai resistor. Model ini dinamakan “Potentiometers” atau
“Trimmer Potentiometers”.
Gambar 2.6 Potensiometer
Pada gambar di atas untuk bentuk 3 biasanya digunakan untuk volume kontrol.
Bentuk yang ke 2 merupakan semi fixed resistor dan biasanya di pasang pada PCB
(Printed Circuit Board). Sedangkan bentuk 1 dpotentiometers. Ada 3 tipe didalam
perubahan nilai dari resistor variabel, perubahan tersebut dapat dilihat pada gambar :
Gambar 2.7 Grafik Perubahan Nilai pada Potensiometer
Pada saat tipe A diputar searah jarum jam, awalnya perubahan nilai resistansi
menjadi sangat cepat. Tipe ini sangat cocok dengan karakteristik telinga manusia.
Karena telinga sangat peka ketika membedakan suara dengan volume yang lemah,
tetapi tidak terlalu sensitif untuk membedakan perubahan suara yang keras. Biasanya
tipe A ini juga disebut sebagai “Audio Taper” potensiometer. Untuk tipe B perubahan
resistansinya adalah linier dan cocok digunakan untuk Aplikasi Balance Control,
resistance value adjustment in circuit, dll. Sedangkan untuk tipe C perubahan resistansinya kebalikan dati tipe A.
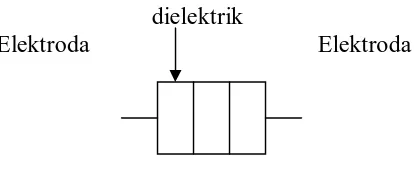
2.5 Kapasitor
Kapasitor adalah komponen elektronika yang dapat menyimpan muatan listrik.
Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu
bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum,
keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka
muatan-muatan positif akan mengumpul pada salah satu kaki elektroda metalnya dan
pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu
lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknya
muatan negatif tidak bisa menuju ke ujung kutup positif karena terpisah oleh bahan
elektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada
konduktif pada ujung- ujung kakinya. Di alam bebas phenomena kapasitor terjadi
pada saat terkumpulnya muatan-muatan positif dan negatif diawan. Kondensator
diidentikkan mempunyai dua kaki dan dua kutub yaitu positif dan negatif serta
Sedangkan jenis yang satunya lagi kebanyakan nilai kapasitasnya lebih rendah,
tidak mempunyai kutub positif atau negatif pada kakinya, kebanyakan berbentuk bulat
pipih berwarna coklat, merah, hijau dan lainnya seperti tablet atau kancing baju yang
sering disebut kapasitor (capacitor).
dielektrik
Elektroda Elektroda
Gambar 2.8 Skema Kapasitor
Namun kebiasaan dan kondisi serta artikulasi bahasa setiap negara tergantung
pada masyarakat yang lebih sering menyebutkannya. Kini kebiasaan orang tersebut
hanya menyebutkan salah satu nama yang paling dominan digunakan atau lebih sering
didengar. Pada masa kini, kondensator sering disebut kapasitor (capacitor) ataupun
sebaliknya yang pada ilmu elektronika disingkat dengan huruf (C). Satuan dalam
kondensator disebut Farad.
Adapun cara memperluas kapasitor atau kondensator dengan jalan:
1. Menyusunnya berlapis-lapis.
2. Memperluas permukaan variabel.
3. Memakai bahan dengan daya tembus besar
Kapasitor merupakan komponen pasif elektronika yang sering dipakai didalam
merancang suatu sistem yang berfungsi untuk mengeblok arus DC, Filter, dan
penyimpan energi listrik. Didalamnya 2 buah pelat elektroda yang saling berhadapan
insulator dinamakan dielektrik. Ketika kapasitor diberikan tegangan DC maka energi listrik disimpan pada tiap elektrodanya. Selama kapasitor melakukan pengisian, arus
mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang
membedakan tiap - tiap kapasitor adalah dielektriknya. Berikut ini adalah jenis– jenis
kapasitor yang dipergunakan dalam perancangan ini.
2.5.1 Electrolytic Capacitor (ELCO)
Gambar 2.9 Electrolytic Capacitor (ELCO)
Elektroda dari kapasitor ini terbuat dari alumunium yang menggunakan
membrane oksidasi yang tipis. Karakteristik utama dari Electrolytic Capacitor adalah
perbedaan polaritas pada kedua kakinya. Dari karakteristik tersebut kita harus berhati
– hati di dalam pemasangannya pada rangkaian, jangan sampai terbalik. Bila
polaritasnya terbalik maka akan menjadi rusak bahkan “MELEDAK”. Biasanya jenis
kapasitor ini digunakan pada rangkaian power supply. Kapasitor ini tidak bisa
digunakan pada rangkaian frekuensi tinggi. Biasanya tegangan kerja dari kapasitor
dihitung dengan cara mengalikan tegangan catu daya dengan 2. Misalnya kapasitor
akan diberikan catu daya dengan tegangan 5 Volt, berarti kapasitor yang dipilih harus
2.5.2 Ceramic Capacitor
Kapasitor menggunakan bahan titanium acid barium untuk dielektriknya. Karena
tidak dikonstruksi seperti koil maka komponen ini dapat digunakan pada rangkaian
frekuensi tinggi. Biasanya digunakan untuk melewatkan sinyal frekuensi tinggi
menuju ke ground. Kapasitor ini tidak baik digunakan untuk rangkaian analog, karena
dapat mengubah bentuk sinyal. Jenis ini tidak mempunyai polaritas dan hanya tersedia
dengan nilai kapasitor yang sangat kecil dibandingkan dengan kedua kapasitor diatas.
Gambar 2.10 Ceramic Capacitor
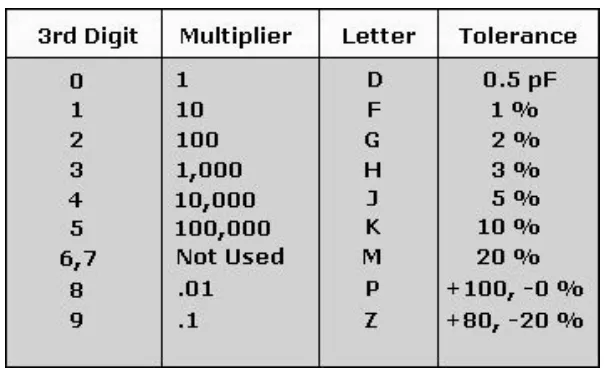
2.5.3 Nilai Kapasitor
Untuk mencari nilai dari kapasitor biasanya dilakukan dengan melihat angka/kode
yang tertera pada badan kapasitor tersebut. Untuk kapasitor jenis elektrolit memang
mudah, karena nilai kapasitansinya telah tertera dengan jelas pada tubuhnya.
Sedangkan untuk kapasitor keramik dan beberapa jenis yang lain nilainya dikodekan.
Biasanya kode tersebut terdiri dari 4 digit, dimana 3 digit pertama merupakan angka
dan digit terakhir berupa huruf yang menyatakan toleransinya. Untuk 3 digit pertama
angka yang terakhir berfungsi untuk menentukan 10n, nilai n dapat dilihat pada tabel
Tabel 2.5 Nilai Kapasitor
Misalnya suatu kapasitor pada badannya tertulis kode 474J, berarti nilai
kapasitansinya adalah 47 + 104 = 470.000 pF = 0.47µF sedangkan toleransinya 5%.
Yang harus diingat didalam mencari nilai kapasitor adalah satuannya dalam pF (Pico
Farad).
2.6 Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit
pemutus dan penyambung (switching), stabilisasi tegangan, modulasi sinyal atau
sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran listrik, dimana
berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan
pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Pada umumnya, transistor memiliki 3 terminal. Tegangan atau arus yang
dipasang di satu terminalnya mengatur arus yang lebih besar yang melalui 2 terminal
lainnya. Transistor adalah komponen yang sangat penting dalam dunia elektronik
Rangkaian analog melingkupi pengeras suara, sumber listrik stabil, dan penguat sinyal
radio. Dalam rangkaian-rangkaian digital, transistor digunakan sebagai saklar
berkecepatan tinggi. Beberapa transistor juga dapat dirangkai sedemikian rupa
sehingga berfungsi sebagai logic gate, memori, dan komponen-komponen lainnya.
Transistor adalah komponen elektronika yang mempunyai tiga buah terminal.
Terminal itu disebut emitor, basis, dan kolektor. Transistor seakan-akan dibentuk dari
penggabungan dua buah dioda. Dioda satu dengan yang lain saling digabungkan
dengan cara menyambungkan salah satu sisi dioda yang senama. Dengan cara
penggabungan seperti dapat diperoleh dua buah dioda sehingga menghasilkan
transistor NPN.
Bahan mentah yang digunakan untuk menghasilkan bahan N dan bahan P
adalah silikon dan germanium. Oleh karena itu, dikatakan :
1. Transistor germanium PNP
2. Transistor silikon NPN
3. Transistor silikon PNP
4. Transistor germanium NPN
5.
Semua komponen di dalam rangkaian transistor dengan simbol. Anak panah
yang terdapat di dalam simbol menunjukkan arah yang melalui transistor.
Gambar 2.11 Simbol Tipe Transistor
Keterangan :
C = kolektor
E = emiter
B = basis
Didalam pemakaiannya transistor dipakai sebagai komponen saklar
(switching) dengan memanfaatkan daerah penjenuhan (saturasi) dan daerah
penyumbatan (cut off) yang ada pada karakteristik transistor.
Dari banyak tipe-tipe transistor modern, pada awalnya ada dua tipe dasar
transistor bipolar junction transistor (BJT atau transistor bipolar) dan field-effect
transistor (FET), yang masing-masing bekerja secara berbeda. Transistor bipolar dinamakan demikian karena kanal konduksi utamanya menggunakan dua polaritas
pembawa muatan: elektron dan lubang, untuk membawa arus listrik. Dalam BJT, arus
listrik utama harus melewati satu daerah/lapisan pembatas dinamakan depletion zone,
dan ketebalan lapisan ini dapat diatur dengan kecepatan tinggi dengan tujuan untuk
mengatur aliran arus utama tersebut. FET ( juga dinamakan transistor unipolar ) hanya
menggunakan satu jenis pembawa muatan (elektron atau hole, tergantung dari tipe
FET). Dalam FET, arus listrik utama mengalir dalam satu kanal konduksi sempit
dengan depletion zone di kedua sisinya (dibandingkan dengan transistor bipolar
dimana daerah Basis memotong arah arus listrik utama). Dan ketebalan dari daerah
perbatasan ini dapat dirubah dengan perubahan tegangan yang diberikan, untuk
mengubah ketebalan kanal konduksi tersebut.Secara umum, transistor dapat
dibeda-bedakan berdasarkan banyak kategori:Materi semikonduktor: Germanium, Silikon,
1. Kemasan fisik: Through Hole Metal, Through Hole Plastic, Surface Mount, IC,
dan lain-lain
2. Tipe: UJT, BJT, JFET, IGFET (MOSFET), IGBT, HBT, MISFET, VMOSFET,
MESFET, HEMT, SCR serta pengembangan dari transistor yaitu IC (Integrated
Circuit) dan lain-lain.
3. Polaritas: NPN atau N-channel, PNP atau P-channel
4. Maximum kapasitas daya: Low Power, Medium Power, High Power
5. Maximum frekwensi kerja: Low, Medium, atau High Frequency, RF transistor,
Microwave, dan lain-lain
6. Aplikasi: Amplifier, Saklar, General Purpose, Audio, Tegangan Tinggi, dan
lain-lain.
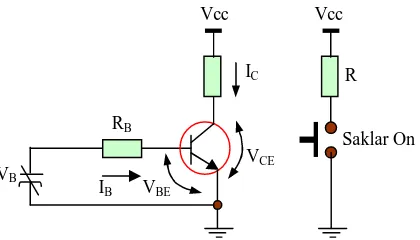
Pada daerah penjenuhan nilai resistansi persambungan kolektor emiter secara
ideal sama dengan nol atau kolektor dan emiter terhubung langsung (short). Keadaan
ini menyebabkan tegangan kolektor emiter (VCE) = 0 Volt pada keadaan ideal, tetapi
pada kenyataannya VCE bernilai 0 sampai 0,3 Volt. Dengan menganalogikan transistor
sebagai saklar, transistor tersebut dalam keadaan on seperti pada gambar .
Gambar 2.12 Transistor sebagai Saklar ON
Saturasi pada transistor terjadi apabila arus pada kolektor menjadi
maksimum dan untuk mencari besar arus basis agar transistor saturi adalah :
Rc
Hubungan antara tegangan basis (VB) dan arus basis (IB) adalah :
B
Jika tegangan VB telah mencapai BE B
Gambar 2.13 dibawah ini menunjukkan apa yang dimaksud dengan VCE (sat)
adalah harga VCE pada beberapa titik dibawah knee dengan posisi tepatnya
ditentukan pada lembar data. Biasanya VCE (sat) hanya beberapa perpuluhan volt,
walaupun pada arus kolektor sangat besar bisa melebihi 1 volt. Bagian dibawah
Gambar 2.13 Karakteristik Daerah Saturasi Pada Transistor
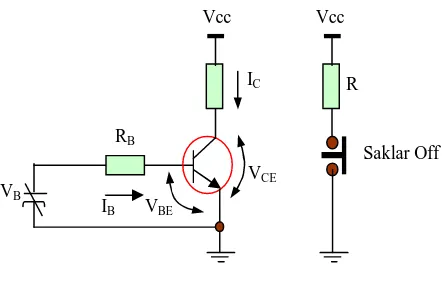
Pada daerah penyumbatan,nilai resistansi persambungan kolektor emiter
secara ideal sama dengan tak terhitung atau terminal kolektor dan emiter terbuka
(open). Keadaan ini menyebabkan tegangan (VCB) sama dengan tegangan sumber
(Vcc). Tetapi pada kenyataannya Vcc pada saat ini kurang dari Vcc karena
terdapat arus bocor dari kolektor ke emiter. Dengan menganalogikan transistor
sebagai saklar, transistor tersebut dalam keadaan off seperti gambar dibawah ini.
Gambar 2.14 Transistor Sebagai Saklar OFF
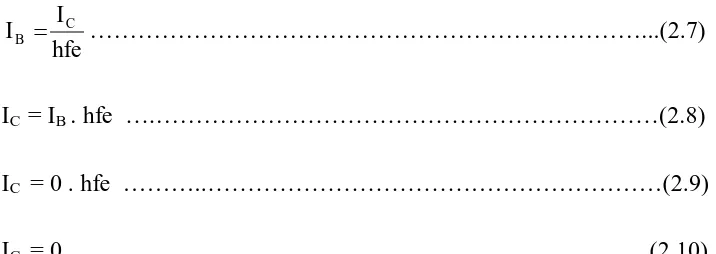
Keadaan penyumbatan terjadi apabila besar tegangan habis (VB) sama dengan
hfe I
I C
B ………...(2.7)
IC = IB . hfe ….………(2.8)
IC = 0 . hfe ………..………(2.9)
IC = 0 ………(2.10)
Hal ini menyebabkan VCE sama dengan Vcc dapat dibuktikan dengan rumus :
Vcc = Vc + VCE …………..……… (2.11)
VCE = Vcc – (Ic . Rc) …..……… (2.12)
VCE = Vcc …..……… (2.13)
2.7 Dioda
Dioda adalah suatu bahan yang dibuat dari bahan yang disebut PN Junction yaitu
suatu bahan campuran yang terdiri dari bahan positif (P type) dan bahan negatif (N
type). Apabila kedua bahan tersebut dipertemukan maka akan menjadi komponen
aktif yang disebut Dioda. P type akan membentuk kaki yang disebut kaki Anoda dan
N type akan membentuk Katoda. Pada dioda, arus listrik hanya akan dapat mengalir
dari anoda ke kutub katoda.
A K
2.7.1 Karakteristik Dioda
Sifat umum dioda adalah hanya dapat menghantarkan arus listrik ke satu arah saja.
Oleh karena itu bila pemasangan dioda terbalik maka dioda tidak akan dapat
menghantarkan arus listrik. Prinsip ini biasanya digunakan sebagai pengaman alat
elektronika yaitu untuk menunjukkan benar atau salah penyambungan catu daya.
Dioda memiliki dua elektroda (kaki), yaitu anoda dan katoda. Kaki – kaki ini
tidak boleh terbalik dalam pemasangannya. Kaki katoda biasanya dekat dengan tanda
cincin sedangkan kaki yang jauh dari tanda cincin berarti kaki anoda. Jika P (anoda)
diberi tegangan positif dan N (katoda) diberi tegangan negatif maka pemberian
tegangan ini disebut bias maju (biased forward), seperti yang diperlihatkan pada
gambar 2.14.a. Sebaliknya, bila diberi tegangan yang terbalik yaitu P (anoda) diberi
tegangan negatif dan N (katoda) diberi tegangan positif maka pemberian tegangan ini
disebut bias mundur (biased reverse). Pada keadaan ini, arus yang mengalir dalam
dioda sangat kecil sehingga dapat diabaikan (gambar 2.14.b).
a. Bias Maju ( Biased Forward )
P N
I
b. Bias Mundur ( Biased Reverse )
Gambar 2.16 Sifat Dioda Bias Maju dan Bias Mundur
Pada saat diberi biased forward, dioda dapat dialiri arus dengan resistansi yang
cukup kecil, yang dikenal dengan nama resistansi maju (forward). Sebaliknya, jika
dioda diberi biased reverse, maka arus listrik akan mengalami resistansi yang amat
besar dan disebut resistance reverse
Dioda dapat dianggap suatu Voltage Sensitive Electronic Switch, dimana
dioda akan menutup atau dalam kondisi ON jika anoda lebih positif dari katoda dan
dioda akan terbuka jika kondisi sebaliknya. Macam – macam dioda yang harus
diketahui adalah :
1. Dioda Penyearah (Rectifier)
2. Dioda Zener
3. Dioda Cahaya (LED – Light Emiting Dioda)
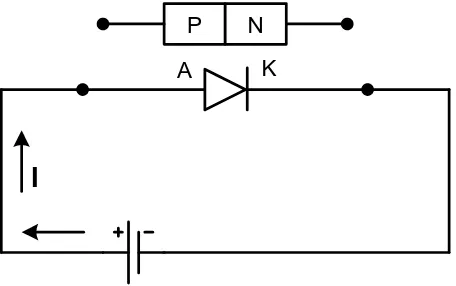
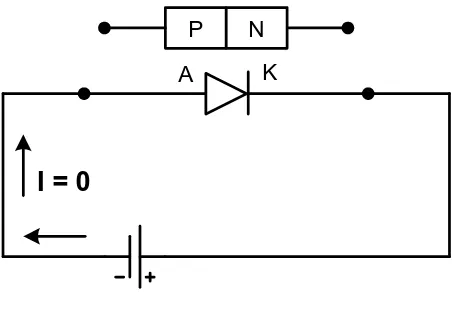
2.7.2 Dioda Penyearah (Rectifier)
Dioda ini biasanya digunakan pada power supply, namun digunakan juga pada
rangkaian radio sebagai detektor, dan lain – lain. Prinsip kerja dari dioda penyearah
adalah sebagai berikut :
P N
I = 0
a. Simbol b. Cara kerja dioda penyearah
Gambar 2.17 Dioda Penyearah Yang Diberi Arus Bolak Balik (AC)
Arus AC yang mendorong elektron keatas melalui resistor, saat melewati
dioda hanya ½ periode positif dari tegangan input yang akan memberikan biased
forward pada dioda, sehingga dioda akan menghantarkan selama ½ periode positif.
Tetapi untuk ½ periode negatif, dioda dibias reverse dan terjadilah penyumbatan
karena kecil sekali arus yang dapat mengalir. Dengan demikian, arus AC telah
disearahkan oleh dioda ini menjadi arus yang searah (DC).
2.7.3 Dioda Zener
Dioda zener merupakan dioda yang banyak sekali digunakan setelah dioda penyearah.
Lambang dari dioda zener dapat dilihat pada gambar 2.16.
Gambar 2.18 Simbol Dioda Zener
2.7.4 Dioda Cahaya (LED : Light Emitting Dioda)
LED merupakan salah satu jenis dioda yang mengubah energi perpindahan electron –
electron yang jatuh dari pita konduksi ke pita valensi menjadi cahaya. Berwana –
Input Output
warninya cahaya yang dipancarkan ini, dikarenakan jenis bahan yang digunakan
berbeda – beda. Bahan – bahannya antara lain gallium, arsen dan fosfor. Penggunaan
LED biasanya berhubungan dengan segala hal yang dilihat oleh manusia, seperti
untuk mesin hitung, jam digital, dan lain – lain.
Gambar 2.19 Simbol Dioda Cahaya ( LED )
2.8 Relay
Relay adalah suatu rangkaian switch magnetik yang bekerja bila mendapat catu dan
suatu rangkaian trigger. Relay memiliki tegangan dan arus nominal yang harus
dipenuhi output rangkaian pendriver atau pengemudinya. Arus yang digunakan pada
rangkaian adalah arus DC.
Konstruksi dalam suatu relay terdiri dari lilitan kawat (coil) yang dililitkan
pada inti besi lunak. Jika lilitan kawat mendapatkan aliran arus, inti besi lunak kontak
menghasilkan medan magnet dan menarik switch kontak. Switch kontak mengalami
gaya listrik magnet sehingga berpidah posisi ke kutub lain atau terlepas dari kutub
asalnya. Keadaan ini akan bertahan selama arus mengalir pada kumparan relay. Dan
relay akan kembali keposisi semula yaitu normaly ON atau Normaly OFF, bila tidak
ada lagi arus yang mengalir padanya, posisi normal relay tergantung pada jenis relay
yang digunakan. Dan pemakaian jenis relay tergantung pada kadaan yang diinginkan
dalam suatu rangkaian.
Menurut kerjanya relay dapat dibedakan menjadi :
a. Normaly Open (NO), saklar akan tertutup bila dialiri arus
b. Normaly Close (OFF), saklar akan terbuka bila dialiri arus
c. Change Over (CO), relay ini mempunyai saklar tunggal yang nomalnya tertutup
yang lama, bila kumparan 1 dialiri arus maka saklar akan terhubung ke terminal
A, sebaliknya bula kumparan 2 dialiri arus maka saklar akan terhubung ke
terminal B.
Analogi rangkaian relay yang digunakan pada tugas akhir ini adalah saat basis
transistor ini dialiri arus, maka transistor dalam keadaan tertutup yang dapat
menghubungkan arus dari kolektor ke emiter yang mengakibatkan relay terhubung.
Sedangkan fungsi dioda disini adalah untuk melindungi transistor dari tegangan
induksi berlebih, dimana tegangan ini dapat merusak transistor. Jika transistor pada
basis tidak ada arus maju, transistor terbuka sehingga arus tidak mengalir dari kolektor
ke emiter, relay tidak bekerja karena tidak ada arus yang mengalir pada gulungan
kawat.
Bentuk relay yang digunakan da bentuk relay dengan rangkaian driver dapat
dilihat pada gambar 2.20.
a. Simbol b. Relay dengan rangkaian driver
2.9 Sensor Jarak Ultrasonik PING
Sensor jarak ultrasonik ping adalah sensor 40 khz produksi parallax yang banyak
digunakan untuk aplikasi atau kontes robot cerdas. Kelebihan sensor ini adalah hanya
membutuhkan 1 sinyal ( SIG ) selain jalur 5 v dan ground. Perhatikan gambar
dibawah ini :
Gambar 2.21 Sensor jarak ultrasonik ping
Gambar 2.22 Instalasi Sensor Ping
Sensor PING mendeteksi jarak objek dengan cara memancarkan gelombang
ultrasonik ( 40 KHz ) selama t = 200 us kemudian mendeteksi pantulannya. Sensor
PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller
pengendali ( pulsa trigger dengan tout min 2 us ).
Spesifikasi sensor ini :
a. Kisaran pengukuran 3cm-3m.
c. Echo hold off 750uS dari fall of trigger pulse.
d. Delay before next measurement 200uS.
e. Burst indicator LED menampilkan aktifitas sensor.
Gambar 2.23 Diagram Waktu Sensor Ping
Sensor Ping mendeteksi jarak obyek dengan cara memancarkan gelombang
ultrasonik (40 kHz) selama tBURST (200 μs) kemudian mendeteksi pantulannya.
Sensor Ping memancarkan gelombang ultrasonik sesuai dengan kontrol dari
mikrokontroler pengendali (pulsa trigger dengan tOUT min. 2 μs). Gelombang
ultrasonik ini melalui udara dengan kecepatan 344 meter per detik, mengenai obyek
dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high pada pin SIG
setelah memancarkan gelombang ultrasonik dan setelah gelombang pantulan
terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa High (tIN) akan
sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan
Gambar 2.24 Jarak Ukur Sensor Ping
Sistem minimal mikrokontroller ATMega 8535 dan software basic stamp
Editor diperlukan untuk memprogram mikrokontroller dan mencoba sensor ini.
Keluaran dari pin SIG ini yang dihubungkan ke salah satu port di kit mikrokontroller.
Contoh aplikasi sensor PING pada mikrokontroler BS2, dimana pin SIG terhubung ke
pa pin7, dan memberikan catu daya 5V dan ground. fungsi Sigout untuk mentrigger
ping, sedangkan fungsi Sigin digunakan untuk mengukur pulsa yang sesuai dengan
BAB III
SISTEM KERJA RANGKAIAN
3.1 Diagram Blok
Secara garis besar, perancangan pengisian tangki air otomatis menggunakan sensor
ultrasonik ini terdiri dari Bar Display, Mikrokontroler ATMega8535, Relay, Sensor
ultrasonik, Pompa Air dan Tangki Penampungan. Diagram blok dari perancangan
pengisian tangki air otomatis menggunakan sensor ultrasonik ditunjukkan pada
gambar 3.1 berikut :
1. Bar Display Led berfungsi untuk menampilkan level ketinggian air dimana led
terdiri dari 16 buah dan setiap led akan menyala pada level ketinggian air
dengan jarak yang berbeda – beda.
2. Mikrokontroler Atmega8535 meupakan pusat kendali dari seluruh rangkaian.
Dimana mikrokontroler akan mengambil data yang dikirimkan oleh Sensor
Ultrasonik kemudian membandingkannya dengan nilai yang benar dan
ditampilkan oleh Display Led, kemudian mengendalikan pengisian tangki air.
3. Relay berfungsi untuk menghidup atau mematikan pompa air yang
dikendalikan mikrokontroler.
4. Pompa Air berfungsi untuk pengisi air pada tempat penampungan air.
5. Sensor Ultrasonik berfungsi sebagai pengendali ketinggian air. Sinyal yang
dipancarkan kedalam air kemudian akan merambat sebagai sinyal. Sinyal
tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian
penerima Ultrasonik. Setelah sinyal tersebut sampai di penerima ultrasonik,
kemudian sinyal tersebut akan diproses untuk menghitung jarak level
ketinggian air pada penampungan.
6. Tangki Penampungan Air berfungsi untuk menampung air yang dikirim dari
pompa air.
3.2 Rangkaian Mikrokontroler ATMega8535
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Kompoen
utama dari rangkaian ini adalah IC mikrokontroler ATMega8535. Pada IC inilah
semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang
Vreg LM7805CT
IN OUT TIP32C
100ohm
100uF
330ohm 220V 50Hz 0Deg
TS_PQ4_12
2200uF 1uF
1N5392GP 1N5392GP
12 Volt
5 Volt
Gambar 3.2 Rangkaian mikrokontroller ATMega8535
3.3 Rangkaian Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada.
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt,
keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian,
sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke motor stepper.
Rangkaian power supplay ditunjukkan pada gambar 3.3 berikut ini.
Pompa
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan
agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari
keluaran 2 buah dioda penyearah.
3.4Rangkaian Relay Pengendali Pompa Air
Relay ini berfungsi sebagai saklar elektronik yang dapat menghidupkan / mematikan
peralatan elektronik (dalam hal ini Pompa Air). Rangkaian relay pengendali Pompa
Air tampak seperti gambar di bawah ini :
Pada rangkaian di atas, untuk menghubungkan rangkaian dengan 220 V AC
digunakan relay. Relay merupakan salah satu komponen elektronik yang terdiri dari
lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan
medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positif
relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2)
dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana
medan magnet ini akan menarik logam yang mengakibatkan saklar (kaki 3) terhubung
ke kaki 4. Dengan demikian, jika kita gunakan kaki 3 dan kaki 4 pada relay sebagai
saklar untuk menghidupkan/mematikan lampu maka kita dapat menghidupkan/
mematikan Pompa Air dengan cara mengaktifkan atau menon-aktifkan relay.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay digunakan
transistor tipe NPN. Dari gambar dapat dilihat bahwa negatif relay dihubungkan ke
kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif
maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke
ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan
mengakibatkan relay aktif. Sebaliknya jika transistor tidak aktif, maka kolektor tidak
terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12 volt, keadaan ini
menyebabkan tidak aktif.
Kumparan pada relay akan menghasilkan tegangan singkat yang besar ketika
relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini.
Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan
ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara normal dioda ini
tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinon-aktifkan, pada
dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor,
yang mengakibatkan kerusakan pada transistor.
Rangkaian ini juga dilengkapi dengan LED indicator, dimana LED indikator
ini akan menyala, jika relay aktif dan sebaliknya, LED indikator ini akan mati jika
relay tidak aktif. LED indikator ini dikendalikan oleh sebuah transistor jenis PNP,
dimana basis transistor ini mendapatkan input dari kolektor transistor C945. Transistor
tipe PNP akan aktif jika mendapat tegangan 0 volt pada basisnya.
3.5 Saklar
Saklar adalah sebuah perangkat yang digunakan untuk memutuskan jaringan listrik,
atau untuk menghubungkannya. Jadi saklar pada dasarnya adalah alat penyambung
atau pemutus aliran listrik. Selain untuk jaringan listrik arus kuat, saklar berbentuk
kecil juga dipakai untuk alat komponen elektronika arus lemah.
Secara sederhana, saklar terdiri dari dua bilah logam yang menempel pada
suatu rangkaian, dan bisa terhubung atau terpisah sesuai dengan keadaan sambung
(on) atau putus (off) dalam rangkaian itu. Material kontak sambungan umumnya
dipilih agar supaya tahan terhadap korosi. Kalau logam yang dipakai terbuat dari
bahan oksida biasa, maka saklar akan sering tidak bekerja. Untuk mengurangi efek
korosi ini, paling tidak logam kontaknya harus disepuh dengan logam anti korosi dan
anti karat. pada dasarnya tombol bisa diaplikasikan untuk sensor mekanik, karena bisa
dijadikan sebagai pedoman pada mikrokontroller untuk pengaturan alat dalam
3.6 Sensor Ultrasonik PING
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang
suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya,
frekuensi kerjanya pada daerah di atas gelombang suara dari 40 KHz hingga 400 KHz.
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima.
Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric
dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma
penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz
diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi
(mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan
dan ini disebut dengan efek piezoelectric.
Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi
gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya). Pantulan
gelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan gelombang
ultrasonik akan diterima kembali oleh unit sensor penerima. Selanjutnya unit sensor
penerima akan menyebabkan diafragma penggetar akan bergetar dan efek
piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
Untuk lebih jelas tentang prinsip kerja dari sensor ultrasonik dapat dilihat prinsip dari
Gambar 3.5 Prinsip kerja Sensor Ultrasonik
Besar amplitudo sinyal elektrik yang dihasilkan sensor penerima tergantung
dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor
penerima. Proses sensoring yang dilakukan pada sensor ini menggunakan metode
pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara
sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh
sinyal ultrasonik dalam perjalanannya dari rangkaian pengirim sampai diterima oleh
rangkaian penerima, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada
media rambat yang digunakannya, yaitu udara. Prinsip pantulan dari sensor ulrasonik
ini dapat dilihat pada gambar 3.6 sebagai berikut:
3.6.1 Prinsip Kerja Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal
berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonic
Gambar 3.7 Pemancar Ultrasonik Transmitter
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3 K ohm untuk
pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang
merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati
dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1,
sehingga arus yang akan mengalir pada kolektotr T1 akan besar sesuai dari
penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati
sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari
penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V.
Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik dengan
Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).
3.6.2 Prinsip Kerja Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh
pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima
tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian
band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan.
Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian
komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan
tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan
sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat
dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan
jarak yang lebih jauh adalah low (logika’0’). Logika-logika biner ini kemudian
BAB IV
ANALISA DAN PENGUJIAN ALAT
4.1 Pengujian Rangkaian Mikrokontroller ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan
menghubungkan rangkaian ini dengan power supplay sebagai sumber tegangan. Kaki
40 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 20 dihubungkan
dengan ground. Kemudian tegangan pada kaki 40 diukur dengan menggunakan
voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 volt.
Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler
ATMega8535. program yang diberikan adalah sebagai berikut :
Loop :
Cpl p3.7
Acall Tunda
Sjmp Loop
Tunda :
Mov r7,#255
Tnd :
Mov R6,#255
Djnz R6,#$
Djnz R7,Tnd
Program di atas akan mengubah logika yang ada pada P3.7 selama selang
waktu tunda. Jika logika pada P3.7 high maka aka diubah menjadi low, demikian juga
sebaliknya jika ligika pada P3.7 low maka akan diubah ke high, demikian seterusnya.
Logika low akan mengaktifkan transistor sehingga LED akan menyala dan logika high
akan menonaktifkan transistor, sehingga LED padam. Dengan demikian program ini
akan membuat LED berkedip terus menerus. Jika LED telah berkedip terus – menerus
sesuai dengan program yang diinginkan, maka rangkaian mikrokontroler telah
berfungsi dengan baik.
Jika program tersebut diisikan ke mikrokontroler ATMega8535, kemudian
mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian
minimum mikrokontroller ATMega8535 telah bekerja dengan baik.
4.2 Pengujian Rangkaian Power Supplay (PSA)
Pengujian pada bagian rangkaian catu daya ini dapat dilakukan dengan mengukur
tegangan keluaran dari rangkaian ini dengan menggunakan volt meter digital. Dari
hasil pengujian diperoleh tegangan keluaran pertama sebesar + 5,0 volt. Sedangkan
tegangan keluaran kedua adalah sebesar +12,3 volt. Power Supply bertugas merubah
tegangan listrik AC menjadi tegangan listrik DC yang stabil sampai suatu arus
maksimum yang ditentukan oleh design. Pengujian dilakukan dengan memberikan
Vreg
Gambar 4.1 Rangkaian Power Supplay (PSA)
4.3 Pengujian Rangkaian Relay
Pengujian rangkaian relay dapat dilakukan dengan memberikan teganan 5 volt dan 0
volt pada basis transistor C945. Transistor C945 merupakan transistor jenis NPN,
transistor jenis ini akan aktif jika pada basis diberi tegangan > 0,7 volt dan tidak aktif
jika pada basis diberi tegangan < 0,7 volt. Aktifnya transistor akan mengaktifkan
relay. Pada rangkaian ini relay digunakan untuk memutuskan hubungan Pompa air
dengan sumber tegangan 12 volt, dimana hubungan yang digunakan adalah normally
close ( NC ), dengan demikian jika relay aktif maka hubungan Pompa air ke sumber
tegangan akan terputus.
Pengujian dilakukan dengan memberikan tegangan 5 volt pada basis transistor,
jika relay aktif dan pompa air akan hidup, maka rangkaian ini telah berfungsi dengan
baik. Pengujian selanjutnya dilakukan dengan menghubungkan input rangkaian ini ke
Gambar 4.2 Pengujian Rangkaian Relay
Kemudian memberikan program yang sederhana pada mikrokontroller
ATMega8535. Program yang diberikan adalah sebagai berikut:
Setb P0.1
. . .
Perintah diatas akan memberikan logika high pada P0.1, sehingga P0.1 akan
mendapatkan tegangan 5 volt. Tegangan 5 volt ini akan mengaktifkan transistor C945,
sehingga relay juga menjadi aktif dan lampu akan hidup. Berikutnya memberikan
program sederhana untuk menonaktifkan relay. Programnya sebagai berikut:
Clr P0.1
. . .
Perintah diatas akan memberikan logika low pada P0.1, sehingga P0.1 akan
mendapatkan tgangan 0 volt. Tegangan 0 volt ini akan menonaktifkan transistor
C945, sehingga relay juga menjadi tidak aktif dan lampu tidak hidup.
4.4 Pengujian Sensor Ultrasonik PING
Sensor ultrasonic ping akan bekerja jika mendapat suplay tegangan sebesar 5 V DC.
dimana tegangan 5 V DC dihubungkan dengan konektor Vcc dan ground pada sensor.
sebagai control sensor ini dalam pendeteksian objek sekaligus pembacaan jarak objek
dengan sensor ini.
Progam dapat mensetting sensor ini dengan jarak yang telah ditentukan sesuai
dengan ring deteksi dari sensor ultrasonic ping ini. Ketika sensor disetting jaraknya
maka dengan jarak yang telah ditentukanlah sensor akan bekerja dalam pendeteksian
objek. Jarak pantulan yang dipakai sensor ultrasonic pada rangkaian ini adalah 30 cm.
Langkah selanjutnya adalah memberikan program sederhana pada Sensor Ultrasonik.
Program yang diberikan adalah sebagai berikut :
unsigned char urf_pink (void)
4.5 Data Analisa Pengukuran Jarak Ketinggian Air.
Tabel 4.5 Data Hasil Pengujian Pengisian Tangki Air Otomatis
Keterangan :
a. Tangki Kosong
Pada Tangki Kosong ketinggian air 0 cm maka semua display led dalam keadaan
hidup (high) dan pompa akan hidup untuk mengisi air ke tangki.
b. Start Awal
Pada Start Awal ketinggian air 7,8 – 8,7 cm maka semua display led dalam
keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
c. Level 1
Pada Level 1 ketinggian air 8,8 cm, maka display led level 1 akan hidup (high),
sedangkan display led level 2, level 3, level 4, level 5, level 6, level 7, level 8,
level 9, level 10, level 11, level 12, level 13, level 14, level 15, level dan 16 dalam
keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
d. Level 2
Pada Level 2 ketinggian air 9,5 cm, maka display led level 1 dan level 2 akan
hidup (high), sedangkan display led level 3, level 4, level 5, level 6, level 7, level
8, level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level 16
dalam keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
e. Level 3
Pada Level 3 ketinggian air 10,3 cm, maka display led level 1, level 2 dan level 3
akan hidup (high), sedangkan display led level 4, level 5, level 6, level 7, level 8,
level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level 16 dalam
f. Level 4
Pada Level 1 ketinggian air 11 cm, maka display led level 1, level 2, level 3 dan
level 4 akan hidup (high), sedangkan display led level 5, level 6, level 7, level 8,
level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level 16 dalam
keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
g. Level 5
Pada Level 5 ketinggian air 11,6 cm, maka display led level 1, level 2, level 3,
level 4 dan level 5 akan hidup (high), sedangkan display led level 6, level 7, level
8, level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level 16
dalam keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
h. Level 6
Pada Level 6 ketinggian air 12,2 cm, maka display led level 1, level 2, level 3,
level 4, level 5 dan level 6 akan hidup (high), sedangkan display led level 7, level
8, level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level dalam
keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
i. Level 7
Pada Level 7 ketinggian air 12,9 cm, maka display led level 1, led level 2, level 3,
level 4, level 5, level 6 dan level 7 akan hidup (high), sedangkan display led level
8, level 9, level 10, level 11, level 12, level 13, level 14, level 15 dan level 16
dalam keadaan mati (low) dan pompa akan terus hidup sampai 20 cm.
j. Level 8
Pada Level 8 ketinggian air 13,3 cm, maka display led level 1, level 2, level 3,