Lampiran 1
Listing program dari sensor ultrasonik us-016
/*****************************************************
Dim Us As Word
Config ADC = Single, Prescaler = Auto
Do
Listing program dari seluruh sistem
/*****************************************************
Dim us as word
Config ADC = single, Prescale = Auto
Lampiran 3
Gambar Komponen
1. Sensor ultrasnik us-016 4. Wadah air
2. Optocoupler
5. solenoid valve
3. Relay
Lampiran 4
Gambar Alat Secara Keseluruhan
Tampak Samping
Lampiran 5
Rangkaian Lengkap Sistem
DAFTAR PUSTAKA
Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Bishop, Owen. 2004. Dasar-dasar Elektronika.Terjemahan.Jakarta: Penerbit Erlangga.
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Didin, Wahyudin, 2007, Belajar Mudah Mikrokontroller AT89S52 dengan Basic
Menggunakan BASCOM-8051, Yogyakarta: Andi.
Malvino. 1985. Prinsip – prinsip elektronika, Edisi III, Jilid 1. Jakarta : Gramedia Pustaka Umum.
Millman, J. 2010. Electronic Devices and Circuits. Columbia : McGraw-Hill International Book Company.
Setiawan,Afrie.2006. 20 aplikasi mikrokontroller ATMEGA8535 & ATMEGA 16 menggunakan BASCOM -AVR . Yogyakarta: ANDI
Suhata.2005.Aplikasi Mikrokontroler Sebagai Pengendali Peralatan Elektronika. Jakarta:Elex Media Komputindo.
Wardhana, Lingga. 2011. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta : Penerbit Andi
Yogyakarta
http://www.academia.edu/5472233/Sistem-kran-air-otomatis.html Di akses Pada tanggal 20 Februari 2016
BAB 3
PERANCANGAN SISTEM
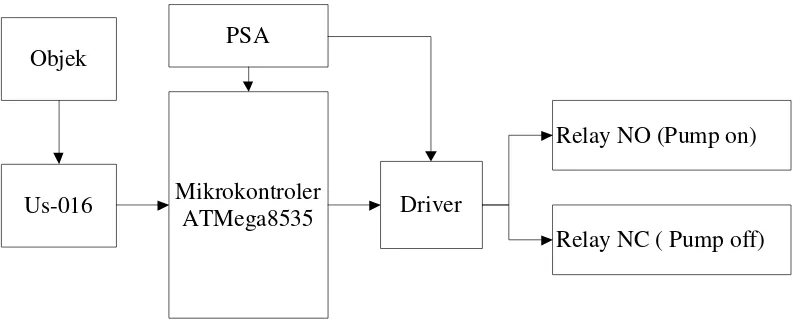
3.1 Diagram Block Cara Kerja Alat
Us-016 Mikrokontroler
Gambar 3.1 Blok diagaram sistem otomasi kran air wudhu
Berikut deskripsi fungsi setiap blok:
1. Blok Objek : Objek adalah benda hidup atau mati yang menjadi acuan aktifnya sensor Ultrasonik Us-016.
2. Us-016 : sebagai sensor jarak yang akan mendeteksi adanya objek yang akan berwudhu.
3. Blok Mikrokontroler ATmega 8535 : Membaca dan mengola hasil penerimaan data dari Sensor Ultrasonik Us-016 menjadi sebuah perintah ke driver.
4. Driver : Mengeksekusi perintah dari microcontroller ( membuka katup water pump).
5. PSA : mensuply tegangan ke microcontroller dan driver. 6. Relay NO (Pump on) : mengaktifkan pompa
7. Relay NC (Pump off) : nonaktifkan pompa
3.2 Rangkaian Mikrokontroller ATMega 8535
Rangkaian Sistem minimum pada penelitian ini di rancang sedemikian rupa agar microcontroller dapat bekerja. Rangkaian ini terdiri atas rangkaian osilator, standar PORT USB programer, sistem reset, dan sumber tegangan.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
Sistem reset pada mikrokontroler berada pada pin 9. Sistem microcontroller akan melakukan reset apabila pin 9 menerima satu siklus sinyal (1 dan 0). Sistem reset otomatis menggunakan kapasitro 100 nF/16V dan sebuah resistor senilai 10 KΩ. Dengan pemasangan kapasitor dan resistor ini, pada saat power supply dinyalakan maka mikrokontroller akan reset secara otomatis, kemudian bekerja secara normal.
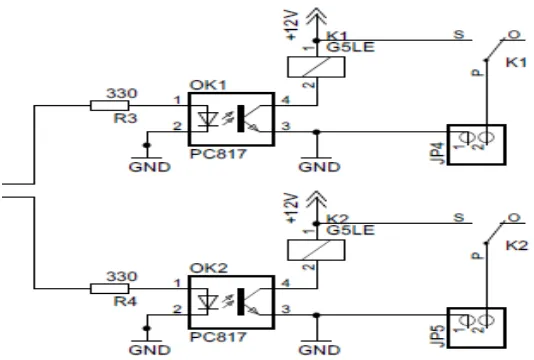
3.3 Rangkaian Driver (Optocoupler & Relay)
Rangkaian driver ini digunakan untuk mengaktifkan relay agar pompa dapat dikendalikan oleh mikro. Komponen utamanya yaitu relay dan optocoupler. Relay terdiri dari coil dan contact, coil adalah gulungan kawat yang mendapat arus listrik, sedang contact adalah sejenis saklar yang pergerakannya tergantung dari ada tidaknya arus listrik di coil. Contact ada 2 jenis : Normally Open (kondisi awal sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum diaktifkan close). Secara sederhana berikut ini prinsip kerja dari relay : Kontak Normally Open akan membuka ketika tidak ada arus mengalir pada kumparan, tetapi tertutup secepatnya setelah kumparan menghantarkan arus atau diberi tenaga. Kontak normally Close akan tertutup apabila kumparan tidak diberi tenaga dan membuka ketika kumparan diberi daya. Masing-masing kontak biasanya digambarkan sebagai kontak yang tampak dengan kumparan tidak diberi tanaga atau daya. Relay yang digunakan adalah relay 12 volt, ini berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatif relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik logam yang mengakibatkan saklar terhubung.
Gambar 3.4 Rangkaian Driver (Optocoupler & Relay)
Pada rangkaian driver relay digunakan optocoupler jenis PC 817 untuk mengaktifkan relay. Cara kerja optocoupler pada alat ini adalah Jika antara phototransistor dan LED terhalang maka phototransistor tersebut akan off sehingga output dari kolektor akan berlogika high, Sebaliknya jika antara phototransistor dan LED tidak terhalang maka phototransistor dan LED tidak terhalang maka phototransistor tersebut akan on sehingga output-nya akan berlogika low.
3.4 Rangkaian Sensor Ultrasonik (Us-016)
Pada pembuatan alat kontrol kran air wudhu ini menggunakan sensor jarak yaitu sensor ultrasonik jenis 016. Jarak tangkap modul Sensor ultrasonik Us-016 dapat mencapai 2 cm ~ 3m non-kontak pengukuran fungsi jarak, tegangan listrik 5V, beroperasi pada 3.8mA, mendukung tegangan output analog, stabil dan dapat diandalkan. Modul ini dapat diatur untuk rentang yang berbeda tergantung pada aplikasi (pengukuran jarak maksimum untuk setiap 1m dan 3m); ketika pin rentang mengambang jarak tempuhnya adalah 3m. jarak US-016 dapat dikonversi ke tegangan output analog, sehingga mempermudah dalam pemuatan program. Pin 40 mikro disambungkan ke output ADC sensor, kaki 6, 7, 8 dari mikro disambungkan ke kutub program dari sensor.
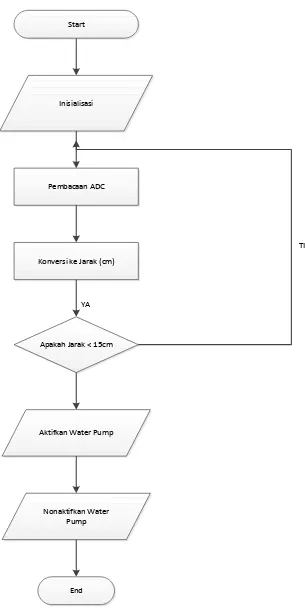
3.7 Diagram Alir Sistem Mikrokontroler ATMega8535
Gambar 3.6 Diagram Alir Sistem Mikrokontroler Start
Inisialisasi
Pembacaan ADC
Konversi ke Jarak (cm)
Apakah Jarak < 15cm
Aktifkan Water Pump YA
TIDAK
Nonaktifkan Water Pump
End
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Mikrokontroller ATMega 8535
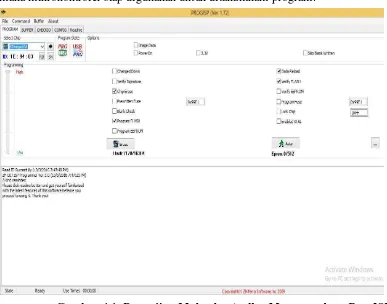
Pengujian rangkaian mikrokontriller ATMega 8535 dilakukan dengan menggunakan software PROGISP (Ver 1.72) karena pemrograman menggunakan mode ISP. Pengujian rangkaian ini dilakukan untuk mengetahui apakah mikrokontroller dapat diprogram langsung pada papan rangkaian dan rangkaian ini telah dikenali oleh program dwounloder
Hal yang pertama yang dilakukan adalah menghubungkan rangkaian mikorokontroler ke PC dengan menggunakan downloader, kemudian buka software PROGISP dan pilih chip select ATMega8535.Setelah memilih chip, pilihRead Signature pada bagian toolbar kanan maka text box akan menampilkan Read ID Succesfully. Jika sudah tampil pada texbox kata Read ID Succesfully maka mikrokontroler siap digunakan untuk ditanamkam program.
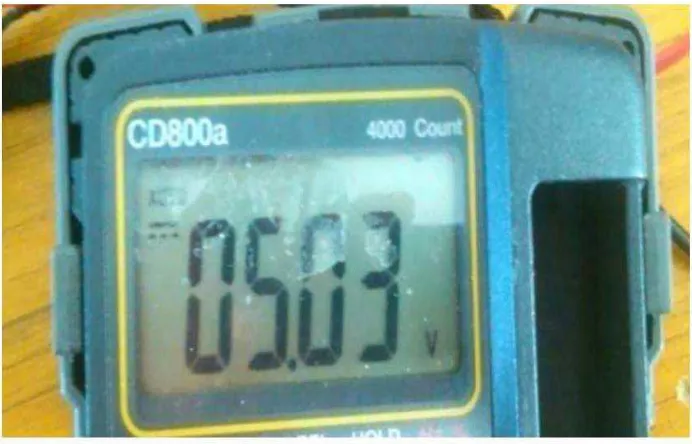
4.2 Pengujian Rangkaian Regulator
Pengujian rangkaian regulator dilakukan untuk mengetahui besar tegangan yang dihasilkan oleh output regulator L7805 menggunakan multimeter digital. Tegangan output regulator L7805 ini akan digunakan pada mikrokontroler yaitu sebesar 5 volt. Setelah dilakukan pengukuran menggunakan multimeter digital, maka terlihat jelas tampilan multimeter menunjukkan tegangan output regulator L705 sebesar 5 volt. Hal ini dapat menunjukkan bahwa tegangan yang diberikan ke mikrokontroler sesuai dengan spesifikasinya. Jadi dapat dipastikan tegangan dari rangkaian regulator tidak merusak mikrokontroler ATmega8535.
Gambar 4.2 Hasil Pembacaan output tegangan regulator L7805
4.3 Pengujian Rangkaian Relay
Pengujian rangkaian relay dilakukan untuk melihat bekerja atau tidaknya rangkaian relay pada sistem. Untuk mengaktifkan relay maka digunakan optocoupler. Relay di hubungkan pada Port C.0 mikrokontroler. Pada keadaan ON, infrared optocoupler dalam keadaan aktif maka secara otomatis fototransistor dalam keadaan saturasi,sehingga tegangan yang mengalir di coil relay sebesar 125 mV. Sebaliknya jika infrared dalam keadaan tidak aktif maka pada fototransistor dalam keadaan cut off, maka arus yang mengalir dalam keadaan off dan tegangan
sebesar 15,3 volt. Adapun program yang diisikan ke mikrokontroller untuk mengukur tegangan pada relay adalah sebagai berikut.
Config Portc.0 = output
Setelah program diatas dijalankan maka akan diperoleh hasil pengukuran. Dibawah ini adalah tabel data hasil pengukuran perbandingan tegangan pada mikrokontroler dengan relay:
Tabel 4.1 Tabel Pengukuran perbandingan tegangan pada mikrokontroler dengan relay
Mikrokontroler Portc.0 Relay
ON 4.98 V 125 mV
OFF 125 mv 15,3 V
4.4 Pengujian Rangkaian Sensor Ultrasonik Us-016
ultrasonik yang dikirim oleh sensor ultrasonik, gangguan pada pendeteksiaan sensor dapat diakibatkan oleh penghalang yang tidak mampu memantulkan gelombang bunyi dengan baik dan adanya interferensi gelombang dengan frekuensi yang sama.
Pulsa selebar 10 μs menyatakan jarak 1 mm. Jadi misalkan lebar pulsa yang dikirim adalah 10 ms, maka hasil pengukuran adalah 100 cm. Cara kerja sensor Dapat di simpulkan bahwa sensor ini ketika di beri penghalang/ benda yang menghalangi maka sensor akan menimbulkan tegangan sebesar pantulan yang di berikan. Setelah data di dapat berbentuk pulsa selanjutnya di baca oleh mikrokontroller. Adapun program yang diisikan ke mikrokontroller untuk mengukur ADC yang terdeteksi oleh sensor Ultrasonik us-016 adalah sebagai berikut:
Dim Us As Word
Config ADC = Single, Prescaler = Auto Do
Us = Get adc(0) Print Us
Waitms 100 Loop
Setelah program diatas dijalankan maka akan diperoleh hasil pengukuran. Dibawah ini adalah tabel data hasil pengukuran ADC pada jarak 10 cm – 30 cm:
Tabel 4.2 Tabel Data Hasil Pengukuran ADC
Jarak ( cm ) ADC Keterangan
10 00100101 (35) Kran tertutup
11 00100111(37) Kran tertutup
12 00101010(42) Kran tertutup
13 00101101(45) Kran tertutup
14 00110001(49) Kran tertutup
15 00110101(53) Kran terbuka
16 00111001(57) Kran terbuka
17 00111100(60) Kran terbuka
18 00111111(63) Kran terbuka
19 01000000(64) Kran terbuka
20 01000011(67) Kran terbuka
21 01000111(71) Kran terbuka
22 01001011(75) Kran terbuka
23 01001110(78) Kran terbuka
24 01010010(82) Kran terbuka
25 01010111(87) Kran terbuka
26 01011001(89) Kran tertutup
27 010111101(93) Kran tertutup
28 010111100(94) Kran tertutup
29 01100001(97) Kran tertutup
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. Telah berhasil dirancang sebuah alat kontrol kran air yang dapat meminimalisir kerusakan pada kran air wudhu. Sensor yang digunakan adalah sensor ultrasonik jenis us-016. Dengan menggunakan sensor tersebut maka kita dapat menggunakan kran air wudhu tanpa memutar katub kran seperti biasa. Pemutaran kran secara sembarangan dapat mengakibatkan kerusakan kran air. Pemborosan pada air juga diakibatkan karena kelalaian manusia lupa menutup kembali katub kran air. dengan alat kontrol ini maka dapat meminimalisir kerusakan kran kran dan pemborosan air.
2. Sistem yang digunakan pada alat ini adalah sistem sensor ultrasonik us-016 berbasis ATmega8535. Pada sistem ini digunakan driver relay yang terdiri dari 2 komponen utama yaitu relay dan optocoupler. Sistem ini sangat efisien untuk mengaktifkan water pump. Sensor us-016 memiliki perbedaan dengan HC-SR04. Pada sistem sensor us-016 memiliki output yang analog. Data yang dihasilkan dari output analog bersifat linier. Sehingga pembuatan program tidak memerlukan waktu yang panjang. jarak objek yang dapat membuka kran air adalah 15-25 cm. berikut tabel dari hasil pengukuran:
Jarak ( cm ) ADC Keterangan
10 00100101 (35) Kran tertutup
11 00100111(37) Kran tertutup
12 00101010(42) Kran tertutup
13 00101101(45) Kran tertutup
14 00110001(49) Kran tertutup
15 00110101(53) Kran terbuka
16 00111001(57) Kran terbuka
17 00111100(60) Kran terbuka
18 00111111(63) Kran terbuka
19 01000000(64) Kran terbuka
20 01000011(67) Kran terbuka
21 01000111(71) Kran terbuka
22 01001011(75) Kran terbuka
23 01001110(78) Kran terbuka
24 01010010(82) Kran terbuka
25 01010111(87) Kran terbuka
26 01011001(89) Kran tertutup
27 010111101(93) Kran tertutup
28 010111100(94) Kran tertutup
29 01100001(97) Kran tertutup
30 01100100(100) Kran tertutup
5.2 Saran
Setelah melakukan penelitian, diperoleh beberapa hal yang dapat dijadikan saran untuk dilakukan penelitian lebih lanjut yaitu :
1. Pemilihan sensor us-016 sebaiknya memiliki data sheet yang jelas, sehingga karakteristik sensor dapat diketahui.
BAB 2
TINJAUAN PUSTAKA
2.1Sensor Ultrasonik
Gelombang ultrasonik merupakan gelombang akustik yang memiliki frekuensi mulai 20 kHz hingga sekitar 20 MHz. Frekuensi kerja yang digunakan dalam gelombang ultrasonik bervariasi tergantung pada medium yang dilalui, mulai dari kerapatan rendah pada fasa gas, cair hingga padat. Jika gelombang ultrasonik berjalan melaui sebuah medium, Secara matematis besarnya jarak dapat dihitung sebagai berikut:
s = v.t/2……….. (1)
s adalah jarak dalam satuan meter, v adalah kecepatan suara yaitu 344 m/detik dan t adalah waktu tempuh dalam satuan detik. Ketika gelombang ultrasonik menumbuk suatu penghalang maka sebagian gelombang tersebut akan dipantulkan sebagian diserap dan sebagian yang lain akan diteruskan.
Sensor ultrasonik adalah sebuah sensor yang mengubah besaran fisis (bunyi) menjadi besaran listrik. Pada sensor ini gelombang ultrasonik dibangkitkan melalui sebuah benda yang disebut piezoelektrik. Piezoelektrik ini akan menghasilkan gelombang ultrasonik dengan frekuensi 40 kHz ketika sebuah osilator diterapkan pada benda tersebut. Rangkaian penyusun sensor ultrasonik ini terdiri dari transmitter, reiceiver, dan komparator. Selain itu, gelombang ultrasonik dibangkitkan oleh sebuah kristal tipis bersifat piezoelektrik.
Modul sensor Ultrasonik ini dapat mengukur jarak antara 3 cm sampai 3 m. Keluaran dari modul sensor ultrasonik ini berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya yang dihasilkan modul sensor ultrasonik ini bervariasi dari 115 uS sampai 18,5 mS. Secara prinsip modul sensor ultrasonik ini terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya.
Sensor ultrasonik bekerja berdasarkan sistem kerja gelombang, dimana gelombang yang digunakan adalah gelombang suara. Waktu untuk pada saat gelombang suara itu dibangkitkan dan dipantulkan kembali oleh receiver akan membutuhkan waktu.Waktu itulah yang akan menjadi data untuk menghitung jarak yang akan kita ukur karena besaran kecepatan telah ada yaitu kecepatan suara. Dengan kata lain sensor ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara. Berikut adalah spesifikasi sensor ultrasonik :
a. Power Suply : 5 Volt
b. Frekuensi Ultrasonik : 40 KHz c. Jarak maksimal : 400 cm d. Jarak minimal : 2 cm
e. Trigger Pulse Width : 10 µs f. Dimensi : 43 x 20 x 15
Sensor ultrasonik bekerja dengan mengirimkan gelombang suara menuju target dan mengukur waktu yang diperlukan untuk pulsa melenting kembali. Waktu yang diperlukan gaung untuk kembali ke sensor berbanding lurus dengan jarak atau tinggi dari objek, sebab suara mempunyai kecepatan konstan. Sinyal gaung yang kembali secara elektronis diubah menjadi output 4mA sampai dengan 20mA, yang mensuplai kecepatan aliran yang dimonitor ke alat kontrol eksternal. Objek padat, cair, butiran dan tekstil dapat dideteksi dengan sensor ultrasonik. Reflektifitas suara dari permukaan cairan sama dengan objek padat. Tekstil dan buih menyerap gelombang suara dan mengurangi rentang pensensoran.
2.1.1 Prinsip kerja sensor ultrasonik
2.1.2 Timing Diagram sensor Ultrasonik
Timing diagram sensor ultrasonik ditunjukkan pada gambar 2.2 dibawah
ini. Kita hanya perlu menyediakan pulsa 10 μs untuk memicu masukan atau
masukan trigger untuk memulai dan kemudian modul akan mengirim 8 siklus gelombang ultrasonik 40 KHz dan meningkatkan gaungnya (echo). Echo adalah jarak objek yang merupakan lebar pulsa dan jarak pada setiap bagiannya. Rentang melalui interval waktu antara pengiriman sinyal pemicu dan penerima sinyal echo dapat dihitung. Persamaannya adalah level waktu paling tinggi dikalikan dengan kecepatan (340m/s) dibagi dua.
Gambar 2.1 Timing diagram pengoperasian sensor ultrasonik Us-016
Jenis sensor yang digunakan pada penelitian ini adalah sensor Ultrasonik tipe Us-016. Jarak tangkap modul Sensor ultrasonik Us-016 dapat mencapai 2 cm ~ 3m non-kontak pengukuran fungsi jarak, tegangan listrik 5V, beroperasi pada 3.8mA, mendukung tegangan output analog, stabil dan dapat diandalkan. Modul ini dapat diatur untuk rentang yang berbeda tergantung pada aplikasi (pengukuran jarak maksimum untuk setiap 1m dan 3m); ketika pin rentang mengambang jarak tempuhnya adalah 3m. jarak US-016 dapat dikonversi ke tegangan output analog, tegangan output sebanding dengan jarak yang diuku
(a)
(b)
Gambar 2.2 Sensor Ultrasonik Us-016 (a) tampak depan (b) tampak belakang
Sensor ultrasonik us-016 memiliki 4 PIN, dari gambar dapat dijelaskan dari kiri ke kanan ke-empat PIN sebagai berikut:
PIN 1 : VCC menyambungkan ke VCC 5 volt
PIN 3 : Out Analog tegangan output pin (out) , tegangan analog sebanding dengan jarak pengukuran, rentang output adalah 0 ~ Vcc PIN 4 : Ground Terhubung ke sirkuit eksternal.
2.2 ATMega8535
ATMega8535 adalah mikrokontroler CMOS 8 bit daya rendah berbasis arsitektur RISC. Instruksi dikerjakan pada satu siklus clock, ATMega8535 mempunyai throughput mendekati 1 MIPS per MHz, hal ini membuat ATMega8535 dapat bekerja dengan kecepatan tinggi walaupun dengan penggunaan daya rendah. Mikrokontroler ATmega8535 memiliki beberapa fitur atau spesifikasi yang menjadikannya sebuah solusi pengendali yang efektif untuk berbagai keperluan. Fitur-fitur tersebut antara lain:
1. Saluran I/O sebanyak 32 buah, yang terdiri atas Port A, B, C dan D 2. ADC (Analog to Digital Converter)
3. Tiga buah Timer/Counter dengan kemampuan perbandingan 4. CPU yang terdiri atas 32 register
5. Watchdog Timer dengan osilator internal 6. SRAM sebesar 512 byte
7. Memori Flash sebesar 8kb dengan kemampuan read while write 8. Unit Interupsi Internal dan External
9. Port antarmuka SPI untuk men-download program ke flash 10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi 11. Antarmuka komparator analog
12. Port USART untuk komunikasi serial.
Mikrokontroler merupakan sebuah single chip yang didalamya telah dilengkapi
dengan CPU (Central Prosessing Unit); RAM ( RandomAcces Memory); ROM ( Read only Memory), Input, dan Output, Timer\ Counter, Serial com port secara spesifik digunakan untuk aplikasi –aplikasi control dan buka aplikasi serbaguna. Mikrokontroler umumnya bekerja pada frekuensi 4MHZ-40MHZ. Perangkat ini sering digunakan untuk kebutuhan kontrol tertentu seperti pada sebuah penggerak
motor. Read only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, sesuai dengan susunan MCS-51. Memory penyimpanan program dinamakan sebagai memory program.Random Acces Memory (RAM) isinya akan begitu sirna IC kehilangan catudaya dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Mikrokontroler biasanya dilengkapi dengan UART (Universal Asychoronous Receiver Transmitter) yaitu port serial komunikasi serial asinkron, USART (Universal Asychoronous\Asy choronous Receiver Transmitter) yaitu port yang digunakan untuk komunikasi serial asinkron dan asinkron yang kecepatannya 16 kali lebih cepat dari Uart, SPI ( Serial Port Interface), SCI ( Serial Communication Interface ), Bus RC ( Intergrated circuit Bus ) merupakan 2 jalur yang terdapat 8 bit, CAN ( Control Area Network ) merupakan standard pengkabelan SAE (Society of Automatic Enggineers).
2.2.1 Arsitektur ATMega8535
Gambar 2.3 Diagram Blok Fungsional ATmega8535
2.2.2 Fitur ATMega 8535
Kapabilitas detail dari ATMega8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16MHz. 2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte , dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte. 3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps. 5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
2.2.3 Konfigurasi ATMega 8535
Konfigurasi pin ATMega 8535 bisa dilihat pada gambar 2.2. di bawah ini. Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin ATMega 8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya. 2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC. 4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus , yaitu Timer/Counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Oscilat.
6. Port D (PD0.. PD7 merupakan pin I/O dua arah dan fungsi khusus, yaitu komparator analog, interupsi eksternal, komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
Gambar 2.4 Pin ATMega8535
Berikut adalah penjelasan fungsi tiap kaki. 1. PORT A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor ( dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D coverter.
2. PORT B
Merupakan 8 bit directional port I/O. setiap pinnya dapat menyediakan internal pull-up resistor ( dapat diatur per bit). Output buffer Port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B
juga memiliki untuk fungsi\fungsi alternatif khusus seperti yang terlihat pada tabel berikut.
Tabel 2.1. Konfigurasi Pin Port B ATMega 8535
PORT PIN FUNGSI KHUSUS
PB 0 T0 = timer/ counter 0 external counterinput PB 1 T1 = timer/counter 0 external counter input
PB 2 AINO = analog comparator positive input
PB 3 AINI =analog comparator negative input
PB 4 SS = SPI slave select input
PB 5 MOSI = SPI bus master output/slave input
PB 6 MISO = SPI bus master input/slave output
PB 7 SCK = SPI bus serial clock
3. PORT C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor ( dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, DUA pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscilator untuk timer/counter 2.
4. PORT D
yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi\fungsi alternatif khusus.
Tabel 2.2.Konfigurasi Pin Port D ATmega8535
PORT PIN FUNGSI KHUSUS
PD 0 RDX (UART input line)
PD 1 TDX (UART output line)
PD 2 INT0 ( external interrupt 0 input ) PD 3 INT1 ( external interrupt 1 input )
PD 4 OC1B (Timer/Counter1 output compareB match output) PD 5 OC1A (Timer/Counter1 output compareA match
output)
PD 6 ICP (Timer/Counter1 input capture pin)
PD 7 OC2 (Timer/Counter2 output compare match output)
5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low
selama minimal 2 machine cycle maka system akan di-reset. 6. XTAL1
XTAL1 adalah masukan ke inverting oscilator amplifier dan input ke internal clock operating circuit.
7. XTAL2
XTAL2 adalah output dari inverting oscilator amplifier. 8. Avcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah.
2.2.4. Peta Memori
AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal. Register keperluan umum menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register khusus untuk menangani I/O dan control terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan register yang khusus digunakan mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti contoh register, timer/counter, fungsi-fungsi I/O, dan sebagainya. Register khusus alamat memori secara lengkap dapat dilihat tabel ini. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F. Konfigurasi memori dapat kita ketahui dimana, memori program yang terletak dalam flash PEROM
Gambar 2.5 Status Register ATMega 8535
Port I/O pada mikrokontroller ATmega8535 dapat difungsikan sebagai input dan juga sebagai output dengan keluaran high atau low.Untuk mengatur fungsi portI/O sebagai input ataupun output, perlu dilakukan setting pada DDR dan port. Logika port I/O dapat diubah-ubah dalam program secara byte atau hanya bit tertentu. Mengubah sebuah keluaran bit I/O dapat dilakukan menggunakan perintah cbi (clear bit I/O)untuk menghasilkan output low atau perintah sbi (set bit I/O) untuk menghasilkan output high. Pengubahan secara byte dilakukan dengan perintah in atau out yang menggunakan register bantu. I/O merupakan bagian yang paling menarik dan penting untuk diamati karena I/O merupakan bagian yang bersangkutan dengan komunikasi mikrokontroller dengan dunia luar. Selain port I/O, bagian ini juga menyediakan informasi mengenai berbagai peripheral mikrokontroller yang lain, seperti ADC, EEPROM, UART, dan Timer. Komponen-komponen yang tercakup dalam workspace I/O meliputi berbagai register berikut :
1. AD_CONVERTER; register: ADMUX, ADCSR, ADCH, ADCL 2. ANALOG_COMPARATOR; register: ACSR
3. CPU; register: SREG, SPH, SPL, MCUCR, MCUCSR, OSCCAL, SFIOR, SPMCR.
4. EEPROM; register: EEARH, EEARL, EEDR, EECR
5. External_Interrupt; register: GICR, GIFR, MCUCR, MCUCSR 6. PORTA; register: PORTA, DDRA, dan PINA
7. PORTB; register: PORTB, DDRB, dan PINB 8. PORTC; register: PORTC, DDRC, dan PINC 9. PORTD; register: PORTD,DDRD, dan PIND 10. SPI; register: SPDR, SPSR, SPCR
11. TIMER_COUNTER_0; register: TCCR0, TCNT0, OCR0, TIMSK, TIFR, SFIOR
12. TIMER _COUNTER_1; register: TIMSK, TIFR, TCCR1A, TCCR1B, TCNT1H, TCNT1L, OCR1AH, OCR1AL, OCR1BL, ICR1H, 1CR1L 13. TIMER_COUNTER_2; register: TIMSK, TIFR, TCRR2, TCNT2, OCR2, ASSR, SFIOR
14. TWI; register: TWBR, TWCR, TWSR, TWDR, TWAR
15. USART; register: UDR, UCSRA, UCSRB, UCSRC, UBRRH, UBRRL 16. WATCDOG; register: WDTCR
Adapun komponen-komponen yang dapat diamati melalui I/O pada workspace
sebagai berikut : 1. Isi register
- R0 sampai dengan R15 - R16 sampai dengan R13 2. Processor
Adapun Instruksi I/O adalah sebagai berikut :
1. in; membaca data I/O Port atau internal peripheral register {Timers, UART, ke dalam register}
2. Out; menulis data sebuah register ke I/O Port atau internal peripheral register. 3. Idi (load immediate); untuk menulis konstanta ke register sebelum konstanta itu dituliskan ke I/O port.
6. Sbic (skip if bit in I/O is cleared); untuk mengecek apakah bit I/O register clear.Jika ya, skip satu perintah dibawahnya.
7. Sbis (skip if bit in I/O is set); untuk mengecek apakah bit I/O register set. Jika ya, skip satu perintah dibawahnya. Data yang dipakai dalam mikrokontroller ATmega8535 dipresentasikan dalam sistem bilangan biner, desimal, dan bilangan heksadesimal. Data yang terdapat di mikrokontroller dapat diolah dengan berbagai operasi aritmatik (penjumlahan, pengurangan, dan perkalian) maupun operasi nalar (AND, OR, dan EOR).
AVR ATmega8535 memiliki tiga buah timer, yaitu: 1. Timer/counter 0 (8 bit)
2. Timer/ counter 1 (16 bit) 3. Timer/counter 2 (8 bit)
Karena ATmega8535 memiliki 8 saluran ADC maka untuk keperluan konversi sinyal analog menjadi data digital yang berasal dari sensor dapat langsung dilakukan prosesor utama. Beberapa karakteristik ADC internal ATmega8535 adalah
1. Mudah dalam pengoperasian. 2. Resolusi 10 bit.
3. Memiliki 8 masukan analog. 4. Konversi pada saat CPU sleep. 5. Interrupt waktu konversi selesai.
2.3 Bahasa BASIC Menggunakan BASCOM-AVR
BASCOM-AVR adalah program BASIC Compiler berbasis Windows untuk mikrokontroler keluarga AVR seperti ATmega, dan yang lainnya. BASCOM-AVR merupakan program dengan bahasa tingkat tinggi BASIC yang dikembangkan dan dikeluarkan oleh MCS Elektronika. Penggunaan BASCOM-AVR sudah sangat luas di kalangan instrumentasi khususnya pada bahasa pemrograman yang memepermudah para pengguna.
2.3.1 Karakteristik Dalam BASCOM
Dalam progrm BASCOM, karakter dasarnya terdiri atas karakter alphabel (A-Z dan a-z), karakter numeric (0-9), dan karakter spesial (lihat tabel dibawah ini).
Tabel 2.3 Karakter Spesial
karakter Nama
Blank
„ Apostrophe
* Asterisk (symbol perkalian) + Plus sign
, Comma
- Minus sign
. Period (decimal po int)
/
Slash (division symbol) will be handled as\
: Colon
“ Double quotation mark ; Semicolon
< Less than
= Equal sign (assignment symbol or relational operator) > Greater than
\ Backspace (integer or word division symbol)
2.3.2 Tipe Data
Tabel 2.4 Tipe data BASCOM
2.3.3 Variabel
Variabel dalam sebuah pemrograman berfungsi sebagai tempat penyimpanan atau penampungan data sementara, misalnya menampung hasil perhitungan, menampung data hasil pembacaan register, dan lainnya. Variabel merupakan pointer yang menunjukkan pada alamat memori fisik dan mikrokontroler. Dalam BASCOM, ada beberapa aturan dalam penamaan sebuah variabel:
a. Nama variabel maksimum terdiri atas 32 karakter. b. Karakter bisa berupa angka atau huruf.
c. Nama variabel harus dimula dengan huruf. d. Variabel tidak boleh menggunkan kata
e. kata yang digunakan oleh BASCOM sebagai perintah, pernyataan, internal register, dan nama operator (AND, OR, DIM, dan lain-lain)
Sebelum digunakan maka variabel harus dideklarasikan terlebih dahu. Dalam BASCOM, ada beberapa cara untuk mendeklarasikan sebuah variabel. Cara pertama adalah menggunakan pernyataan „DIM‟ diikuti nama tipe datanya. Contohnya pendeklarasian menggunkan DIM sebagai berikut:
Dim nama as byte
Long 4 -214783648 - +2147483647
Single 4 -
String hingga 254 byte -
Dim tombol2 as word
Dim tombol3 as word
Dim tombol4 as word
2.3.4 Alias
Dengan menggunkan alias, variabel yang sama dapat diberikan nama yang lain. Tujuannya adalah mempermudah proses pemrograman. Umumnya, alias digunakan untuk mengganti nama variabel yang baku, seperti port mikrokontroler.
Dim LedBar as byte
Led1 as LedBar.0
Led2 as LedBar.1
Led3 as LedBar.2
Dalam deklarasi diatas, variabel yang sama dapat diberikan nama yang lain. Tujuannya adalah mempermudah proses pemrograman. Umumnya, alias digunakan untuk mengganti nama variabel yang baku, seperti port mikrokontroler.
Dim LedBar as byte
Led1 as LedBar.0
Led2 as LedBar.1
Led3 as LedBar.2
2.3.5 Konstanta
Dalam BASCOM, selain variabel kita mengenal pula konstanta. Konstansa merupakan variabel pula, perbedaannya dengan variabel adalah nilai yang terkandung tetap. Dengan konstanta, kode program yang kita buat akan lebih mudah dibaca dan dapat mencegah kesalahan penulisan pada program kita. Misalnya, kita akan lbih mudah menulis phi dari pada menulis 3,14159867. Sama seperti variabel, agar konstanta bisa dikenal oleh program, maka harus dideklarasikan terlebih dahulu. Berikut adalah pendeklarasikan sebuah konstanta.
Dim A As Const 5
Dim B1 As Const &B1001
Cara lain yang paling mudah:
Const Cbyte = &HF
Const Csingle = 1.1
Const Cstring = “test”
2.3.6 Array
Dengan array, kita bisa menggunakan sekumpulan variabel dengan nama dan tipe yang sama. Untuk mengakses variabel tertentu dalam array, kita harus menggunakan indeks. Indeks harus berupa angka dengan tipe data byte, integer, atau word. Artinya nilai maksimal sebuah indeks sebesar 65535. Proses pendeklarasikan sebuah array hampir sama dengan variabel, namun perbedaannya kita mengikuti jumlah elemennya. Berikut adalah contoh pemakaian array:
Dim kelas(10) as byte berurutan. Untuk pembacanya kita menggunakan indeks dimana elemen disimpan. Pada program diatas, elemen-elemen arraynya dikeluarkan ke Port 1 dari mikrokontroler.
2.3.7 Operasi-Operasi Dalam BASCOM
Pada bagian ini akan dibahas tentang cara menggabungkan, memodifikasi, membandingkan, atau mendapatkan informasi tentang sebuah pernyataan dengan menggunkan operator-operator yang tersedia di BASCOM dan bagaimana sebuah pernyataan terbentuk dan dihasilkan dari operator-operator berikut:
a. Operator Aritmatika
Operator digunakan dalam perhitungan aritmatika meliuti + (tambah), - (kurang), / (bagi), dan * (kali).
b. Operator Relasi
Operator berfungsi membandingkan nilai sebuah angka. Hasilnya dapat digunakan untuk membuat keputusan sesuai dengan program yang kita buat. Operator relasi meliput i:
Tabel 2.5 Tabel Operator Relas
Operator Relasi Pernyataan
= Sama dengan X = Y
Operator logika digunakan untuk menguji sebuah kondisi atau memanipulasi bit dan operasi bolean. Dalam BASCOM, ada empat buah operator logika, yaitu AND, OR , NOT, dan XOR.
Operator logika bisa pula digunakan untuk menguji sebuah byte dengan pola bit tertentu, sebagai contoh:
Dim A As Byte
2.4 Optocoupler
2.4.1 Pengertian Optocoupler
Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya terpisah. Biasanya optocoupler digunakan sebagai saklar elektrik, yang bekerja secara otomatis. Optocoupler atau optoisolator merupakan komponen penggandeng (coupling) antara rangkaian input dengan rangkaian output yang menggunakan media cahaya (opto) sebagai penghubung. Dengan kata lain, tidak ada bagian yang konduktif antara kedua rangkaian tersebut. Optocoupler sendiri terdiri dari 2 bagian, yaitu transmitter (pengirim) dan receiver (penerima).
1. Transmiter
Merupakan bagian yang terhubung dengan rangkaian input atau rangkaian kontrol. Pada bagian ini terdapat sebuah LED infra merah (IR LED) yang berfungsi untuk mengirimkan sinyal kepada receiver. Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra merah tidak terlihat oleh mata telanjang.
2. Receiver
Merupakan bagian yang terhubung dengan rangkaian output atau rangkaian beban, dan berisi komponen penerima cahaya yang dipancarkan oleh transmitter. Komponen penerima cahaya ini dapat berupa photodioda atapun phototransistor. Pada bagian receiver dibangun dengan dasar komponen phototransistor. Phototransistor merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka phototransistor lebih peka untuk menangkap radiasi dari sinar infra merah. Jika dilihat dari penggunaannya, optocoupler biasa digunakan untuk mengisolasi common rangkaian input dengan common rangkaian output. Sehingga supply tegangan untuk masing-masing rangkaian tidak saling terbebani dan juga untuk mencegah kerusakan pada rangkaian kontrol (rangkaian input).
Gambar 2.6 Bentuk fisik Sensor Optocoupler
Optocoupler merupakan gabungan dari LED infra merah dengan fototransistor yang terbungkus menjadi satu chips. Cahaya infra merah termasuk dalam gelombang elektromagnetik yang tidak tampak oleh mata telanjang. Sinar ini tidak tampak oleh mata karena mempunyai panjang gelombang berkas cahaya yang terlalu panjang bagi tanggapan mata manusia. Sinar infra merah mempunyai daerah frekuensi 1 x 1012 Hz sampai dengan 1 x 1014 GHz atau daerah frekuensi
dengan panjang gelombang 1μm – 1mm. LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi prasikap maju, LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer.
sebagai detektor cahaya infra merah. Detektor cahaya ini mengubah efek cahaya menjadi sinyal listrik, oleh sebab itu fototransistor termasuk dalam golongan detektor optik.
Fototransistor memiliki sambungan kolektor–basis yang besar dengan cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan diberi prasikap maju, cahaya yang masuk akan menimbulkan arus pada kolektor. Fototransistor memiliki bahan utama yaitu germanium atau silikon yang sama dengan bahan pembuat transistor. Tipe fototransistor juga sama dengan transistor pada umumnya yaitu PNP dan NPN. Perbedaan transistor dengan fototransistor hanya terletak pada rumahnya yang memungkinkan cahaya infra merah mengaktifkan daerah basis, sedangkan transistor biasa ditempatkan pada rumah logam yang tertutup. Cahaya infra merah termasuk dalam gelombang elektromagnetik yang tidak tampak oleh mata telanjang. Sinar ini tidak tampak oleh mata karena mempunyai panjang gelombang berkas cahaya yang terlalu panjang bagi tanggapan mata manusia. Simbol optocoupler seperti terlihat pada Gambar 2.6.
Gambar 2.7 Simbol Optocoupler
2.4.2 Prinsip Kerja dari Rangkaian Optocoupler
Prinsip kerja dari rangkaian Optocoupler adalah sebagai berikut :
1. Jika antara phototransistor dan LED terhalang maka phototransistor tersebut akan off sehingga output dari kolektor akan berlogika high.
2. Sebaliknya jika antara phototransistor dan LED tidak terhalang maka phototransistor dan LED tidak terhalang maka phototransistor tersebut akan on sehingga output-nya akan berlogika low.
2.5 Relay
Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat mengimplementasikan logika switching. Sebelum tahun 70an, relay merupakan
“otak” dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai menggantikan posisi relay. Relay yang paling sederhana ialah relay elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi listrik. Secara sederhana relay elektro-mekanis ini didefinisikan sebagai berikut :
• Alat yang menggunakan gaya elektromagnetik untuk menutup (atau membuka)
kontak saklar.
• Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Secara umum, relay digunakan untuk memenuhi fungsi – fungsi berikut : - Remote control : dapat menyalakan atau mematikan alat dari jarak jauh - Penguatan daya : menguatkan arus atau tegangan
- Pengatur logika kontrol suatu sistem
Gambar 2.8 Skema relay elektromekanik
BAB I
PENDAHULUAN
1.1Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi berdampak positif dalam pengembangan sensor di bidang fisika instrumentasi. Sensor merupakan sebuah perangkat yang berfungsi untuk mengubah besaran fisis menjadi besaran listrik. Dalam bidang fisika instrumentasi sensor sangat berperan penting. Pada semua bidang, sensor sangat dibutuhkan. Contohnya pada tugas akhir saya, sensor ultrasonik digunakan untuk pembuatan kran otomatis yang di aplikasikan untuk otomasi kran air wudhu.
Tujuan dari tugas akhir ini yaitu membuat alat otomasi kran air wudhu menggunakan sensor ultrasonik berbasis mikrokontroler ATMega8535. Pada pembuatan alat ini mikrokontroler ATMega8535 digunakan sebagai sistem minimum perangkat yang nantinya menjadi otak utama dari sistem yang dijalankan. Pengunaan AT-Mega8535 dikarenakan jenis ini sangat efisien dalam penggunaan dan dapat diintegrasikan dengan sensor yang akan digunakan Sensor yang akan digunakan adalah sensor ultrasonik. Secara prinsip modul sensor ultrasonik terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya.
1.2Rumusan Masalah
Dari uraian latar belakang di atas, maka perumusan masalahnya adalah sebagai berikut :
1. Bagaimana merancang sistem kran air wudhu otomatis menggunakan sensor ultrasonik us-016 berbasis mikrokontroler ATMega8535.
2. Bagaimana mendeteksi objek dibawah lokasi pengambilan air menggunakan sensor ultrasonik us-016.
1.3Batasan Masalah
Untuk menghindari adanya pembahasan di luar materi dalam mengerjakan penelitian ini, maka batasan masalah terdiri dari :
1. Perancangan alat ini berupa prototype menggunakan solenoid valve (kran elektronik) dan sensor ultrasonik berbasis mikrokontroler ATMega8535. 2. Perancangan ini menggunakan sensor ultrasonik us-016.
3. Jumlah solenoid valve (kran elektronik) yang akan digunakan sebanyak 1 buah.
1.4Tujuan Penelitian
Tujuan dilakukan penelitian ini adalah
1. Untuk meminimalisir pemborosan pada penggunaan air dan kerusakan kran air wudhu.
2. Untuk menganalisis kinerja pada realisasi sistem.
1.5Manfaat Penelitian
Penelitian ini diharapkan dapat bermanfaat baik untuk penulis sendiri, mahasiswa, institusi, ataupun masyarakat pengguna pada umumnya.
1. Bagi penulis bermanfaat sebagai penerapan ilmu yang telah di dapat selama perkuliahan yang berhubungan dengan manfaat sensor pada kehidupan sehari – hari.
2. Bagi institusi pendidikan diharapkan hasil penelitian ini bisa digunakan sebagai refrensi untuk melakukan penelitian berikutnya ataupun untuk bahan pembelajaran.
3. Bagi masyarakat umum diharapkan hasil penelitian ini dapat digunakan untuk kenyamanan beribadah pada mesjid-mesjid
1.6Metodologi Penelitian
Pada pembuatan tugas akhir ini digunakan metode studi literature, konsultasi dengan pembimbing, perancangan sistem, dan pengambilan data serta analisanya.
1. Metode literatur
Studi pustaka sebagai persiapan dalam melakukan penelitian dengan mencari dan mengumpulkan referensi mengenai sensor ultrasonik, dan mikrokontroler ATMega8535.
2. Metode Konsultasi
Berkonsultasi secara interaktif dengan pembimbing di Universitas Sumatera Utara.
3. Metode Perancangan Sistem
Melakukan penelitian dan perancangan alat secara langsung di Laboratorium Fisika Terpadu Universitas Sumatera Utara.
4. Metode Pengambilan Data dan Analisa
1.7Sistematika Penulisan
Adapun sistematika dalam penulisan skripsi ini mencakup beberapa bab dan subbab seperti dijelaskan di bawah ini :
BAB I Pendahuluan
Bab ini mencakup latar belakang penelitian, perumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode penelitian dan sistematika penulisan.
BAB II Tinjauan Pustaka
Bab ini membahas tentang landasan teori yang menjadi acuan untuk pengambilan data, analisa data serta pembahasan.
BAB III Perancangan Sistem
Bab ini mencakup perancangan dan sistem kerja. BAB IV Pengujian dan Analisa sistem
Bab ini membahas pengujian modul secara manual, pengujian rancangan sistem sensor us-016 dengan driver menggunakan eagle, pengambilan data dan analisa sistem secara keseluruhan.
BAB V Kesimpulan
Bab ini berisi tentang kesimpulan perancangan sistem sensor ultrasonik us-016 untuk otomasi kran air wudhu.
Daftar Pustaka
Berisi referensi-referensi yang telah digunakan selama pembuatan Tugas Akhir ini sebagai acuan yang mendukung.
ABSTRAK
Telah dilakukan rancang bangun sistem sensor ultrasonik us-016 untuk mengontrol kran air wudhu. Pelaksanaan kegiatan meliputi pembuatan dan pengujian alat. Pengujian yang dilakukan meliputi pengujian mikrokontroler ATmega8535 dan sensor ultrasonik us-016. Us-016 sebagai piranti yang akan mengaktifkan driver relay & optocoupler untuk membuka katup water pump. Referensi jarak yang digunakan mulai dari 15 cm sampai dengan 25 cm. jika ada objek yang tertangkap pada jarak 15-25 cm maka ATmega8535 akan mengirim perintah ke driver agar membuka water pump. Alat kontrol ini menggunakan sumber listrik PLN, selanjutnya tegangan PLN agan diubah ke 5 dan 12 volt menggunakan regulator. Untuk meminialisir pemakaian listrik maka digunakan relay untuk memutus aliran listrik jika tidak ada objek yang terdeteksi oleh Us-16.
ABSTRACT
It has been designed us-016 ultrasonic sensors system to control water faucet ablution. Implementation activities include the manufacture and testing tools. Tests performed include testing of the microcontroller ATmega8535 and us-016 ultrasonic sensor. Us-016 as a tool that would enable the relay and optocoupler driver to open the valve of the water pump. Reference distances are used ranging from 15 cm to 25 cm. if there is an object captured at a distance of 15-25 cm, then ATmega8535 will send commands to the driver to open the water pump, This control means using the power source voltage PLN, PLN here in after agan changed to 5 and 12 volts using a regulator. To minimalism electricity consumption then used the relay to cut off electricity if no objects are detected by Us-16
Keywords: ATmega8535, Us-016, Optocoupler, Relay
SKRIPSI
ABDUL HALIM
120801079
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUANALAM
UNIVERSITAS SUMATERA UTARA
SKRIPSI
Diajukan untuk Melengkapi Tugas dan Memenuhui Syarat Mencapai Gelar Sarjana Sains
ABDUL HALIM
120801079
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUANALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
2016
Judul : Perancangan alat kontrol kran air wudhu menggunakan sistem sensor ultrasonik us-016 berbasis ATmega8535
Kategori : Skripsi
Nama : Abdul Halim
Nomor Induk Mahasiswa : 120801079
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
Universitas Sumatera Utara
Disetujui di Medan, 2016
Komisi Pembimbing:
Pembimbing 2, Pembimbing 1,
Drs. Takdir Tamba, M.Eng.Sc Dr. Marhaposan Situmorang
NIP. 196006031986011002 NIP. 195510301980031003
Disetujui Oleh
Departemen Fisika FMIPA USU Ketua,
PERANCANGAN ALAT KONTROL KRAN AIR WUDHU MENGGUNAKAN SISTEM SENSOR ULTRASONIK US-016 BERBASIS ATMega8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan
yang masing- masing di sebutkan sumbernya.
Medan, 2016
Abdul Halim
120801079
Alhamdulillahirabbil „alamiin, segala puji dan syukur kepada Allah Subhanahu wa Ta‟ala yang telah memberikan rahmat dan karuniaNya sehingga penulis mampu menyelesaikan skripsi ini dengan
judul“ Perancangan Alat Kontrol Kran Air Wudhu Menggunakan Sistem Sensor Ultrasonik Us-016 Berbasis ATmega 8535 “ sesuai dengan waktu yang di tetapkan. Shalawat dan salam kepada junjungan kita Rasulullah, Muhammad SAW semoga kita mendapatkan syafa‟atnya di
kemudian hari kelak. Aamiin.
Dalam penyelesaian skripsi ini penulis menyampaikan rasa hormat dan terimakasih kepada pihak-pihak yang telah memberikan bimbingan, semangat dan petunjuk yang sangat berarti dan berharga bagi penulis untuk menyelesaikan skripsi ini. oleh karena itu pada kesempatan ini penulis mengucapkan terima kasih dan penghargaan sebesar-besarnya kepada:
1. Terkhusus kepada Ayahanda tercinta H.Lasidi dan Ibunda tercinta Halideriati terima kasih yang sebesar-besarnya atas kasih sayang, kepercayaan dan motivasinya sampai penulisan skripsi ini selesai. Juga kepada kakak, abang dan adikku tercinta Yulida, S.Pt , Herlambang, S.E , dan Fajar Ikhsan yang memberikan semangat dan dana kepada penulis untuk segera menyelesaikan skripsi ini.
2. Bapak Dr. Marhaposan Situmorang. sebagai dosen pembimbing pertama yang telah berkontribusi meluangkan waktunya dalam pemeriksaan isi, analisis data, pembahasan pada skripsi ini. Terimakasih juga atas masukan-masukan dan ilmu yang telah beliau berikan semasa kuliah.
3. Bapak Drs.Takdir Tamba M.Eng.Sc sebagai dosen pembimbing kedua yang telah memberikan masukan dan ilmu kepada penulis.
4. Teman-teman seperjuangan Fisika stambuk 2012 Universitas Sumatera Utara yang telah menjadi acuan semangat untuk menyelesaikan skripsi ini.
5. Kepala Laboratorium Fisika Dasar, Laboran, Koordinator dan Para Asisten yang telah menjadi partner dalam menyelesaikan skripsi ini.
ABSTRAK
Telah dilakukan rancang bangun sistem sensor ultrasonik us-016 untuk mengontrol kran air wudhu. Pelaksanaan kegiatan meliputi pembuatan dan pengujian alat. Pengujian yang dilakukan meliputi pengujian mikrokontroler ATmega8535 dan sensor ultrasonik us-016. Us-016 sebagai piranti yang akan mengaktifkan driver relay & optocoupler untuk membuka katup water pump. Referensi jarak yang digunakan mulai dari 15 cm sampai dengan 25 cm. jika ada objek yang tertangkap pada jarak 15-25 cm maka ATmega8535 akan mengirim perintah ke driver agar membuka water pump. Alat kontrol ini menggunakan sumber listrik PLN, selanjutnya tegangan PLN agan diubah ke 5 dan 12 volt menggunakan regulator. Untuk meminialisir pemakaian listrik maka digunakan relay untuk memutus aliran listrik jika tidak ada objek yang terdeteksi oleh Us-16.
Kata kunci : ATmega8535, Us-016, Optocoupler, Relay
ABSTRACT
It has been designed us-016 ultrasonic sensors system to control water faucet ablution. Implementation activities include the manufacture and testing tools. Tests performed include testing of the microcontroller ATmega8535 and us-016 ultrasonic sensor. Us-016 as a tool that would enable the relay and optocoupler driver to open the valve of the water pump. Reference distances are used ranging from 15 cm to 25 cm. if there is an object captured at a distance of 15-25 cm, then ATmega8535 will send commands to the driver to open the water pump, This control means using the power source voltage PLN, PLN here in after agan changed to 5 and 12 volts using a regulator. To minimalism electricity consumption then used the relay to cut off electricity if no objects are detected by Us-16
Halaman
1.5.Manfaat Penelitian ... 3
1.6.Metodologi Penelitian... 3
1.7 Sistematika Penulisan ... 4
BAB 2 Dasar Teori ... 5
2.1. Sensor Ultrasonik ... 5
2.1.1 Prinsip kerja sensor ultrasonik ... 6
2.1.2 Timing Diagram sensor Ultrasonik ... 7
2.2. ATMega8535 ... 9
2.2.1 Arsitektur ATMega8535... 11
2.2.2 Fitur ATMega 8535 ... 12
2.2.3 Konfigurasi ATMega 8535 ... 12
2.2.4. Peta Memori ... 16
2.2.5. Status register (SREG)... 16
2.3 Bahasa BASIC Menggunakan BASCOM-AVR ... 19
2.3.1 Karakteristik Dalam BASCOM ... 20
2.3.2 Tipe Data ... 20
2.3.3 Variabel ... 21
2.3.4 Alias ... 22
2.3.5 Konstanta ... 22
2.3.6 Array ... 23
2.3. 7 Operasi-Operasi Dalam BASCOM ... 23
2.4 Optocoupler ... 25
2.4.1 Pengertian Optocoupler ... 25
BAB 3 Perancangan Sistem ... 30
3.1Diagram Block Cara Kerja Alat ... 30
3.2Rangkaian Mikrokontroller ATMega 8535 ... 31
3.5. Rangkaian Driver (Optocoupler & Relay) ... 32
3.6. Rangkaian Sensor Ultrasonik (Us-016) ... 33
3.7 Diagram Alir Sistem Mikrokontroler ATMega8535 ... 34
BAB 4 Pengujian Alat dan Program... 35
4.1. Pengujian Rangkaian Mikrokontroller ATMega 8535 ... 35
4.2. Pengujian Rangkaian Regulator ... 36
4.3 Pengujian Rangkaian Relay. ... 36
4.4. Pengujian Rangkaian Sensor Ultrasonik Us-016 ... 37
BAB 5 Kesimpulan dan Saran ... 41
5.1. Kesimpulan ... 40
5.2. Saran ... 41
Nomor Judul Halaman Tabel
2.1. Konfigurasi Pin Port B ATMega 8535 ... 14
2.2. Konfigurasi Pin Port D ATmega8535 ... 15
2.3. Karakter Spesial ... 20
2.4. Tipe data BASCOM ... 21
2.5 Tabel Operator Relas ... 24
4.1. Hasil Pengujian Relay ... 38
4.2 Hasil Pengujian Ultrasonik us-016 ... 39
Nomor Judul Halaman Gambar
2.1. Timing diagram pengoperasian sensor ultrasonik Us-016 ... 7
2.2. Sensor Ultrasonik Us-016. ... 8
2.3. Diagram Blok Fungsional ATmega8535 ... 11
2.4. Pin ATMega8535 ... 13
2.5. Status Register ATMega 8535 ... 16
2.6. Bentuk fisik Sensor Optocoupler ... 26
2.7. Simbol Optocoupler ... 27
2.8. Skema relay elektromekanik ... 29
3.9. Blok diagaram sistem otomasi kran air wudhu ... 30
3.1. Rangkaian Sistem Minimum ATMega 8535 ... 31
3.2. Rangkaian Regulator ... 32
3.3. Rangkaian Catu Daya ... 32
3.4 Rangkaian Driver (Optocoupler & Relay)... 33
3.5. Rangkaian Sensor Ultrasonik (Us-016) ke Mikrokontroler ... 34
3.6 Diagram Alir Sistem Mikrokontroler ... 35
4.1. Pengujian Mokrokontroller Menggunakan ProgISP ... 36
Nomor Judul Halaman Lampiran
1. Listing program dari sensor ultrasonik us-016 ... 43
2. Listing program dari seluruh sistem ... 43
3. Gambar Komponen... 44
4. Gambar Alat Secara Keseluruhan ... 45