PENGUKUR KETINGGIAN UNTUK PERHITUNGAN
VOLUME AIR MENGGUNAKAN SENSOR ULTRASONIK
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh
Anto Susanto
10206025
Pembimbing
Dr. Yeffry Handoko Putra, S.T, M.T Ir. Syahrul, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER UNIVERSITAS KOMPUTER INDONESIA
ABSTRAK
Sensor pengukur ketinggian untuk mengukur volume air ini dirancang untuk memudahkan pemantauan pada suatu penampungan air, khususnya pada tempat penampungan air yang sulit dijangkau manusia. Alat ini terdiri dari Sensor PING Ultrasonics Range Finderyang digunakan untuk mengukur jarak atau ketinggian, serta LCD dan PC sebagai tampilan dari hasil pengukuran. Kemudian Keypad digunakan sebagai input pengatur pengisian air, Buzzer digunakan sebagai alarm untuk memberi peringatan jika kondisi penampungan penuh dan mikrokontroler ATMega8535 sebagai pemroses utama pada rangkaian ini. Sehingga terbentuk suatu alat yang dapat mengukur ketinggian dan perhitungan volume air secara otomatis dan pengisian air yang dapat diatur olehuser.
Kata Kunci : Sensor PING, mikrokontroler ATMega8535, LCD, Ketinggian dan
ABSTRACT
Sensors measure the height and volume of water is designed to facilitate the monitoring process on a water reservoir, water reservoirs, especially in hard to reach people. This device consists of Ultrasonics PING Sensor Range Finder is used to measure the distance or height and volume of water, as well as the LCD
and the PC as a display of measurement results. Keypad then used as input time, Buzzer is used as an alarm to warn if the condition of the shelter is full and ATMega8535 microcontroller as the main processors in this series. To form a device that can measure the height and volume of water is automatically and the charging time of water that can be set by the user.
Keywords: Sensor PING, ATMEGA8535 microcontroller, LCD, height and
KATA PENGANTAR
Segala puji dan syukur kita panjatkan kehadirat Allah SWT., yang telah memberikan rahmat dan hidayah-Nya tugas akhir ini dengan judul “Pengukur
Ketinggian untuk Perhitungan Volume Air menggunakan Sensor Ultrasonik” dapat diselesaikan. Tugas akhir ini disusun untuk memenuhi salah satu syarat kelulusan dalam menempuh pendidikan program Strata Satu (S1) pada Jurusan Teknik Komputer, program studi Ilmu Komputer Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kesempurnaan, mengingat keterbatasan pengetahuan, keilmuan,pengalaman serta referensi yang penulis miliki. Oleh karena itu, penulis mengharapkan kritik dan saran yang
sifatnya membangun sehingga dapat menyempurnakan tugas akhir ini dimasa yang akan datang.
Dalam penulisan tugas akhir ini tidak lepas dari bantuan berbagai pihak, sehingga pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih kepada : Dosen Pembimbing I yang selalu memperhatikan dan memberikan arahan kepada penulis selama menempuh studi.
6. Kedua orang tua, Ibu dan Ayah tercinta yang telah banyak berkorban dalam membesarkan penulis, dan tak henti-hentinya memberikan perhatian, nasehat,serta motivasi selama studi. Semoga Allah SWT memberikan kemuliaan kepada keduanya baik di dunia maupun di akhirat kelak.., Amin
7. Kepada teman – teman 06 – TK1 yang selalu mendukung dan memotivasi, khususnya untuk Agung, Ridyan, Radit dan Dewi.
8. Teman-teman Hima Teknik Komputer, Terima kasih atas pengertian dan persahabatan yang diberikan.
9. Semua pihak yang telah banyak membantu dan tidak dapat penulis sebutkan satu persatu, terima kasih banyak atas bantuannya. Akhir kata, semoga semua kebaikan yang telah diberikan oleh semua pihak kepada penulis, mendapatkan balasan yang setimpal dari Allah SWT, dan berharap semoga tugas akhir ini dapat bermanfaat.
Wassalamu’alaikum Wr.Wb.
Bandung, Februari 2012
DAFTAR ISI
a. Pengukuran Permukaan Dengan Gelas Penunjuk 5 b. Pengukuran Permukaan Dengan Pelampung 6
2.1.2. Pengukuran Tidak Langsung 6
2.3. Sensor Ultrasonik 9
2.3.1. Pemancar Ultrasonik(Transmitter) 11
2.3.2. Penerima Ultrasonik(Receiver) 12
2.3.3. Sensor Ultrasonik PING 13
2.4. LCD(Liquid Crystal Display) 14
2.5. Keypad 14
2.6. Buzzer 15
2.7. Motor Servo 16
2.7.1. Jenis Motor Servo 16
2.8. Komunikasi Serial RS232 17
2.9. Komponen Pendukung 18
2.9.1. LM7805 18
2.9.2. LM323 18
2.10. Visual Basic 6.0 18
BAB III PERANCANGAN SISTEM 21
3.1. Diagram Blok Sistem 21
3.2. Perancangan Perangkat Keras(Hardware) 22
3.2.1. Perancangan Mekanik 22
3.2.2. Mikrokontroler AVR ATMega8535 24
3.2.3. Ping Ultrasonik 25
3.2.4. LCD(Liquid Crystal Display) 26
3.2.5. Keypad 27
3.2.6. Motor Servo 28
3.2.7. Sumber Tegangan 28
3.3. Perancangan Perangkat Lunak(Software) 29
3.3.1. Perancangan Algoritma Keseluruhan 29
3.3.2 BASCOM-AVR 31
3.3.3. ISP ( In-System Programming) 31
3.3.4. Modul Komunikasi Serial 32
3.3.5.1. Skema 32
3.3.5.2. Cara Kerja 33
BAB IV Pengujian dan Analisa 35
4.1 Pengujian Perangkat Keras 35
4.1.1 Pengujian Sumber Tegangan (Power supply) 35
4.1.2 Pengujian Sensor Ultrasonik Ping 36
4.2 Implementasi Antarmuka 40
4.3 Implementasi Input Nilai Volume Oleh User...41
BAB V Kesimpulan dan Saran 42
5.1 Simpulan 42
5.2 Saran 42
BAB I
PENDAHULUAN
1.1 Latar Belakang
Di era globalisasi ini perkembangan teknologi berkembang begitu pesat seiring dengan kemajuan pola pikir sumber daya manusia yang semakin maju. Keinginan untuk selalu menciptakan suatu hasil karya mengalami perubahan secara bertahap yang bersifat kompetitif agar dapat menciptakan kemudahan bagi manusianya sendiri yang di dukung dengan perangkat - perangkat canggih.
Pada tempat-tempat penampungan air sering kali diperlukan suatu mekanisme untuk mengetahui ketinggian permukaan air dan volume atau seberapa banyak air yang berada dipenampungan air tersebut. Sering kali mekanisme tersebut masih berupa cara-cara manual, misalnya dengan melihat dan melakukan pengukuran langsung pada tempat penampungan air. Untuk memantau ketinggian air ini ada beberapa cara, yaitu cara tradisional dan cara modern.
Sebelum ditemukannya suatu cara modern, manusia menggunakan semacam tongkat panjang atau galah untuk mendeteksi nilai ketinggian air. Cara tradisional ini memiliki kelemahan yaitu untuk mengukur tangki atau penampungan air yang memiliki kedalaman yang cukup dalam akan mengalami kesulitan dan pengukuran dengan cara ini tidak dapat dilakukan secara terus menerus karena faktor keterbatasan fisik yang ada pada manusia.
Mungkin cara tersebut merupakan cara yang paling sederhana dan mudah. Namun ada penampungan air yang sulit dijangkau untuk dikontrol, oleh karena itu
dibuatlah suatu mekanisme untuk memudahkan pengontrolan tersebut, salah satunya dengan membuat suatu sensor yang dapat mengukur ketinggian dan
pasti, dengan menggunakan sensor ultrasonik yang di pasang di atas tangki atau penampungan air. Digunakan sensor ultrasonik, karena jangkauan dari sensor ini cukup jauh biasanya lebih dari satu meter dan hanya membutuhkan sumber daya yang relatif kecil serta sensor ini mudah untuk diaplikasikan, khususnya pada pengukuran jarak.
1.2 Tujuan Penelitian
Adapun tujuan dari penelitian ini sebagai berikut :
1. Merancang kendali untuk pengontrolan pengukur ketinggian dan volume pada penampungan air dengan sensor ultrasonik.
2. Membuat suatu sistem untuk memberikan informasi atau peringatan dini
apabila air pada bak penampungan akan terisi penuh.
3. Merancang aplikasi input volume air, agar pengisian air dapat diatur oleh
user.
1.3 Rumusan Masalah
Dalam pembuatan tugas akhir ini dirancang sensor yang berfungsi untuk mengukur ketinggian untuk pengontrolan volume air dengan menggunakan Sensor Ultrasonik. Kendali yang akan dibuat dengan memanfaatkan mikrokontroler AVR ATMEGA8535, Sensor Ultrsonik PING, Keypad, LCD, Buzzer, motor servo dan PC untuk tampilan antarmuka pengguna serta pengisian program pada mikrokontroler.
1.4 Batasan Masalah
Batasan masalah dimaksud agar pembahasan dapat dilakukan secara terarah dan tercapai sesuai dengan tujuan, maka perlu ditetapkan batasan-batasan permasalahan yang akan dibahas, yaitu :
1. Ketinggian air maksimum adalah tetap dan pasti nilainya, dalam tugas akhir ini dibuat penampung air mini berbentuk kotak setinggi 100 cm, lebar 25 cm dan panjang 25 cm.
2. Hasil dari pengukuran ditampilkan melalui dua media yaitu LCD dan Komputer .
3. Sistem ini menggunakan sebuah pelampung dan sensor pengukur jarak. 4. Sistem Alarm dengan menggunakanBuzzer.
5. Dirancang Aplikasi dengan menggunakan input dariKeypad agar pengisian volume air dapat diatur olehuser.
6. Debit air tidak ditentukan, artinya aliran atau debit air sesuai dengan aliran air rumah pada umumnya.
1.5 Metode Penelitian
Pada pelaksanaan perancangan yang akan dibuat ini dilakukan beberapa tahapan, yaitu :
1. Penelusuran pustaka
Metode ini digunakan untuk mendapatkan teori mengenai alat yang akan dirancang dan mengetahui cara kerja dari setiap komponen yang digunakan. 2. Observasi.
Teknik pengumpulan data dengan mengadakan penelitian dan peninjauan langsung terhadap permasalahan yang diambil.
3. Studi Literatur
Pengumpulan data dengan cara mengumpulkan literatur, jurnal, paper baik
dari internet maupun bacaan-bacaan yang ada kaitannya dengan judul penelitian.
4. Perancangan Alat
5. Eksperimental dan pengujian alat
Melaksanakan pengujian dan eksperimen dari alat yang telah dirancang serta melakukan analisis dari pengujian alat tersebut.
1.6 Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut :
BAB I PENDAHULUAN
Menguraikan tentang latar belakang permasalahan, mencoba merumuskan inti permasalahan yang dihadapi, menentukan tujuan dan kegunaan penelitian, yang kemudian diikuti dengan pembatasan masalah, serta sistematika penulisan.
BAB II. DASAR TEORI
Pada bab ini akan dibahas mengenai dasar teori dari masing–masing bagian yang menjadi paduan atau dasar dari pembuatan tugas akhir, diantaranya sensor ultrasonik ping dari parallax, mikrokontroler, LCD, dan Keypad.
BAB III. PERANCANGAN SISTEM
Pada bab ini membahas mengenai proses perancangan dan pembuatan alat baik perangkat lunak maupun perangkat keras sistem serta bahan dan alat yang dipergunakan.
BAB IV. PENGUJIAN DAN ANALISA
BAB II
DASAR TEORI
2.1 Pengukuran Ketinggian (Level)
Alat-alat Instrument yang digunakan untuk mengukur dan menunjukkan tinggi permukaan cairan dikenal dengan istilah Level. Pengukuran level adalah yang berkaitan dengan peralatan proses yang berbentuk kolom seperti, Tangki, Drum, Tabung Silinder dan juga berupa kotak atau kubus.
2.1.1 Pengukuran Langsung
Tinggi level dapat dilihat langsung dan diduga kedalamannya tanpa harus mengalami proses pengubahan bentuk bacaan dari hasil pengukuran, ini dikarenakan oleh mekanisme yang secara langsung dapat diamati. Biasanya metoda pengukuran langsung ini dipakai oleh industri yang memerlukan tempat penampungan atau tangki yang berukuran kecil dan ditunjukkan dalam satuan
pengukuran panjang (meter). Dengan diketahuinya tinggi level maka volume dari cairan yang diukur dapat diketahui bila. Pengukuran level secara visual atau secara langsung dapat dilihat dengan bantuan alat ukur. Berikut di bawah ini beberapa contoh pengukuran langsung :
a. Pengukuran Permukaan Dengan Gelas Penunjuk
Gambar 2.1 Pengukuran permukaan dengan gelas penunjuk
b. Pengukuran Permukaan Dengan Pelampung
Banyak sekali cara-cara pengukuran dengan pelampung, tetapi pada dasarnya mempunyai prinsip sama, yaitu gerakan permukaan cairan diikuti dengan gerakan pelampung yang selanjutnya dihubungkan pada jarum berskala. Hubungan antara pelampung jarum penunjuk bias berupa tali, kawat dengan katrol atau batang kaku suatu engsel. Dengan menggunakan pelampung, daerah kerja pengukur permukaan dapat diperbesar. Skala pembacaan dapat diletakkan pada tempat yang tinggi atau rendah atau juga terpisah jauh dari tangki.
2.1.2 Pengukuran Tidak Langsung
Dalam metoda tidak langsung, perubahan tinggi rendahnya level yang terjadi dialihkan dengan penggunaan mekanisme tertentu, sehingga besaran sinyal dapat diamati. Gaya pada cairan menghasilkan gerak mekanik, pergerakan mekanik ini kemudian dikalibrasikan ke dalam bentuk angka-angka. Mekanisme pengalihan perubahan tinggi rendahnya level yang terjadi menjadi suatu besaran sinyal. Di bawah ini merupakan metode pengukuran secara tidak langsung :
a. Pengukuran Permukaan Dengan Ultrasonik
2.2 Mikrokontroler
Mikrokontroler adalah sebuah chip yang yang di dalamnya sudah terdapat Mikroprosesor, I/O pendukung, memori bahkan ADC ( Analog to Digital Converter) perangkat keras dibuat menjadi semakin canggih, jutaan transistor di simpan di dalamnya, miniatur dimensi semakin ditingkatkan dengan kemampuan mengolah program yang lebih komplek sehingga memungkinkan untuk aplikasi disegala bidang. Perkembangan perangkat lunak juga berkembang tak terbatas, seakan hanya dibatasi oleh kemampuan imajinasi manusia saja.
Mikrokontroler adalah mikroprosesor yang dikhususkan untuk instrumentasi dan kendali, contoh kendali aplikasi kendali pada motor, berperan seperti PLC (Programmable Logic Control), pengaturan pengapian dan injeksi bahan bakar
pada kendaraan atau alat mengukur suatu besaran, seperti suhu, tekanan, kelembaban dan lain-lain. Dalam perkembangannya yang begitu cepat,
batasan-batasan tersebut menjadi hilang, seperti definisi mikro dan main frame computer. Beberapa Mikrokontroler disebut Embedded Prosesor atau Embedded Prosesor adalah Mikrokontroler, artinya Prosesor yang diberikan program khusus yang selanjutnya diaplikasikan untuk akuisisi data dan kendali khusus dan bisa diprogram ulang.
2.2.1 Mikrokontroler AVR ATMega8535
AVR atau sebuah kependekan dari Alf and Vegard’s Risc Processor merupakan chip mikrokontroler yang diproduksi oleh Atmel, AVR merupakan seri mikrokontroler CMOS 8-bit buatanAtmel, berbasis arsitketurRISC ( Reduced Instruction Set Computer ). Berbeda dengan mikrokontroler keluarga MCS-51 yang berteknologiCISC(Complex Instruction Set Computing).
programmable Watchdog Timer dan mode power saving. Beberapa diantaranya mempunyai ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-Chip yang mengizinkan memori program untuk diprogram ulang dalam sistem menghubungkanserial SPI.
Gambar 2.2 Mikrokontroller AVR ATMega8535
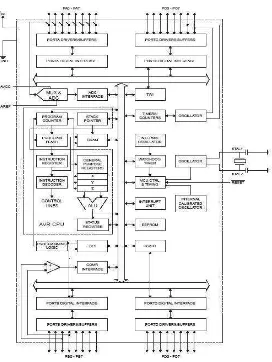
2.2.2 Diagram Blok dan Arsitektur ATMega8535
ATmega8535 mempunyai 32 general purpose register (R0..R31) yang terhubung langsung dengan Arithmetic Logic Unit(ALU), sehinggaregisterdapat diakses dan dieksekusi hanya dalam waktu satu siklus clock. ALU merupakan tempat dilakukannya operasi fungsi aritmetik, logika dan operasi bit. R30 berpasangan dengan R31, yang digunakan sebagai register penunjuk pada pengalamatan tak langsung. Didalam ALU terjadi operasi aritmetik dan logik antar register, antara register dan suatu konstanta, maupun operasi untuk register
Gambar 2.3Diagram Blok ATMega8535
2.2.3 Arsitektur ATMega8535
AVR menggunakan arsitekturHarvard, sehingga memisahkan memori serta bus data dengan program. Program ditempatkan pada Flash Memory, sedangkan memori data terdiri dari 32 buah register serbaguna, 512 bytes internal SRAM dan 64 Kbytes SRAM eksternal yang dapat ditambahkan.
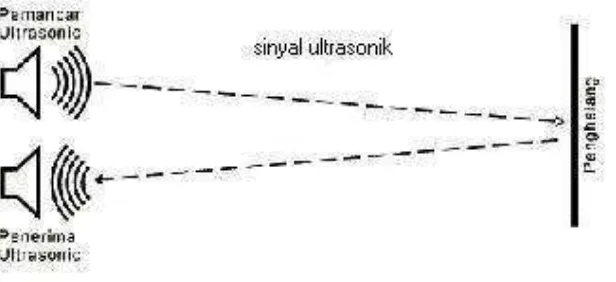
dipancarkan dari transmitter ultrasonik. Ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya (bidang pantul). Prinsip kerja dari sensor ultrasonik dapat ditunjukkan dalam Gambar 2.4 :
Gambar 2.4Prinsip Kerja Sensor Ultrasonik
Prinsip kerja dari sensor ultrasonik adalah sebagai berikut :
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi di atas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Dalam tugas akhir ini digunakan sensor ultrasonikPing.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima ultrasonik.
3. Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus :
S =
.
...
( 2.1 )antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
2.3.1 Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitterultrasonic.
Gambar 2.5Rangkaian Pemancar Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah
sebagai berikut :
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
sehingga arus yang akan mengalir pada kolektor T2 akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V. Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).
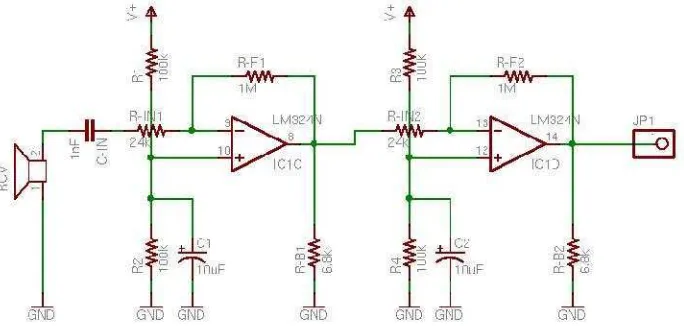
2.3.2 Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang
dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi
ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high ( logika ‘1’ ) sedangkan jarak yang lebih jauh adalah low ( logika’0’ ). Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).
Gambar 2.6Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian penerima gelombang ultrasonik tersebut adalah
1. Pertama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi < 40kHz melalui rangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
6. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
2.3.3 Sensor Ultrasonik PING
Ping Ultrasonics Range Finder adalah modul pengukur jarak dengan
ultrasonik buatan Paralax Inc. yang didesain khusus untuk teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm x 4,5cm), sensor ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran dari Ping berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 µS sampai 18.5 mS.
Gambar 2.7 Sensor Ultrasonics PING
momentum mekanik sehingga merambat sebagai interaksi dengan molekul dan sifat enersia medium yang dilaluinya.
Satu hal yang perlu diperhatikan adalah bahwa Ping tidak dapat mengukur objek yang permukaannya dapat menyerap suara, seperti busa atausound damper. Pengukuran jarak juga akan kacau jika permukaan objek bergerigi dengan sudut tajam.
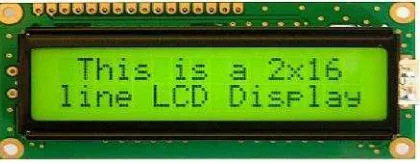
2.4 LCD (Liquid Crystal Display)
LCD adalah suatu komponen yang terintegrasi dimana fungsi dari komponen ini adalah untuk menampilkan karakter dari data yang dikirimkan pada pin atau kaki penerima 8 bit (pada LCD karakter). Secara umum jenis LCD dapat
dibedakan menjadi dua yaitu LCD karakter dan LCD grafik. LCD tidak dapat langsung menampilkan karakter bentuk grafik pada tampilannya sebelum suatu
LCD tersebut di program pada mikrokontroler.
LCD ada banyak jenis dan ukurannya diantaranya ada yang 16 kolom 2 baris, 20 kolom 2 baris. LCD ada yang memiliki backlight ada yang tidak, backlight sangat berguna sekali jika kondisi gelap atau di malam hari. LCD juga memiliki kemampuan untuk mempertajam tampilan atau yang sering disebut dengancontrast.Gambar 2.8 merupakan bentuk fisik dari LCD M1632 :
Gambar 2.8Bentuk Fisik LCDM1632
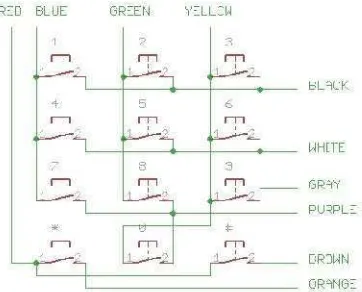
2.5 Keypad
sedang aktif dengan menekan tombol tertentu pada keypad. Keypad digunakan secara meluas pada hampir setiap peralatan kontrol berbasis mikrokontroler.
Keypad sering kita temui dalam berbagai peralatan elektronik, seperti : kalkulator, telepon, remote kontrol dan lain- lain. Keypad terdiri dari sejumlah saklar yang terhubung sebagai baris dan kolom. Ada beberapa jenis keypad yang sering digunakan, antara lain : keypad 1X4, keypad 3X4, keypad 4X4 dan banyak lagi. Gambar 2.9 ini menunjukan skematik dari keypad :
Gambar 2.9Gambar Skematik Keypad
2.6 Buzzer
menghasilkan suara berfrekuensi tinggi, sedangkan speaker mampu untuk menghasilkan suara dalam berfrekuensi tinggi dan rendah.
Pada umumnya buzzer digunakan untuk alarm, karena penggunaannya cukup mudah yaitu dengan memberikan tegangan input maka buzzer akan mengeluarkan bunyi. Frekuensi suara yang di keluarkan oleh buzzer yaitu antara 1-5 KHz.
Gambar 2.10Buzzer
2.7 Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) di mana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya. Motor servo adalah jenis motor yang digunakan sebagai penggerak pada sistem servo (servo-system) seperti pada penggerak pada kontrol posisi lengan robot. Motor servo secara struktur mesin listrik ada 2 macam: DC servo motor dan AC servo motor. DC Servo motor mempunyai konstruksi yang sama dengan
konstruksi motor dc. Motor servo juga bisa digunakan untuk menutup keran secara otomatis, cara kerjanya sama dengan mekanisme posisi suatu lengan robot, apabila ada perintah untuk berputar ke arah tertentu maka motor servo akan berputar, misalnya berputar untuk menutup putaran keran.
2.7.1 Jenis Motor Servo
1. Motor Servo Standar180°
2. Motor ServoContinuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Gambar 2.11Motor Servo
2.8 Komunikasi Serial RS232
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler dengan alat atau komponen lainnya. Port serial pada mikrokontroler terdiri atas dua pin yaitu RXD dan TXD, RXD berfungsi untuk menerima data dari komputer atau perangkat lainnya, TXD berfungsi untuk mengirim data ke komputer atau perangkat lainnya. Standar komunikasi serial untuk komputer ialah RS-232, IC yang digunakan bermacam-macam, tetapi yang paling mudah dan sering digunakan ialah IC MAX232.
RS-232 merupakan standar komunikasi serial yang didefinisikan sebagai
antarmuka antara perangkat terminal data (data terminal equipment atau DTE) dan perangkat komunikasi data (data communications equipment atau DCE)
menggunakan pertukaran data biner secara serial. Standar RS232 ditetapkan oleh Electronic Industry Association and Telecomunication Industry Association pada
2.9 Komponen Pendukung
2.9.1 LM7805
LM7805 merupakan IC Regulator yang menghasilkan tegangan output positif 5V dan IC regulator 79xx untuk catu daya negatif. (xx adalah nilai
tegangan yang dikeluarkan dari regulator tersebut). Gambar 2.12 merupakan gambar dari LM7805:
Gambar 2.12Bentuk Fisik LM7805 dan LM7905
2.9.2 LM323
LM323 adalah IC regulator tiga terminal positif denganoutputtegangan 5V dan kemampuan men-drive beban sebesar 3 Ampere. Sirkuit desain baru dan teknik pengolahan yang digunakan untuk menyediakan output yang tinggi pada regulator ini tanpa harus mengabaikan karakteristik perangkat arus yang lebih rendah. Tidak ada komponen eksternal yang diperlukan untuk pengoperasian LM323. Gambar 2.13 merupakan bentuk fisik dari LM323:
Gambar 2.13Bentuk Fisik LM323
2.10 Visual Basic 6.0
Visual Basic 6.0 akan menjadikan betapa mudahnya menyusun program aplikasi dengan tampilan grafis yang menawan dalam waktu yang relatif singkat. Program aplikasi dapat berupa program database, program grafis, program kendali, dan lain sebagainya.
Visual Basic 6.0 adalah bahasa pemrograman yang bekerja dalam ruang lingkup MS-Windows. Kemampuannya dapat dipakai untuk merancang program aplikasi yang berpenampilan seperti program lainnya berbasis MS-Windows. Kemampuan Visual Basic 6.0 secara umum adalah menyediakan komponen-komponen yang memungkinkan membuat program aplikasi yang sesuai dengan tampilan dan cara kerja MS-Windows. Visual basic yang dikembangkan oleh Microsoft sejak tahun 1991 merupakan pengembangan dari pendahulunya yaitu bahasa pemrograman BASIC (Baginners All-purpose Symbolic Instruction Code) yang dikembangkan pada era 1950-an. Visual basic merupakan salah satu development tool yaitu alat bantu untuk membuat berbagai macam program object, khususnya yang menggunakan sistem operasi windows, juga salah satu bahasa pemrograman object yang mendukung object (Object Oriented Programming = OOP). Dalam pemrograman berbasis obyek (OOP) dikenal beberapa istilah seperti object, property, method dan event. Berikut keterangan mengenai hal tersebut diatas :
a. Objectadalah komponen didalam sebuah program. b. Propertyadalah karakteristik yang dimiliki olehobject.
c. Methodadalah aksi yang dapat dilakukan olehobject. d. Eventadalah kejadian yang dapat dialami olehobject.
event pada object tertentu. Gambar 2.14 merupakan tampilan awal saat akan memulai program Visual Basic 6.0.
Gambar 2.14Tampilan Awal Visual Basic 6.0
Tampilan Integrated Development Environment (IDE) pada sebuah project Visual Basic dengan sebuah form, label, text dan command button terlihat pada Gambar 2.15 di bawah ini.
BAB V
SIMPULAN DAN SARAN
5.1 SIMPULAN
1. Sensor Ultrasonik dapat mengukur ketinggian untuk perhitungan volume air dengan media penampungan air mini menggunakan pelampung berfungsi dan hasil pengukuran dengan sensor hasilnya sama dengan pengukuran secara manual.
2. Input nilaisetpointdapat diatur olehuserdengan menggunakan keypad, jadi pengisian volume air dapat ditentukan olehuser.
3. Tampilan hasil pengukuran dapat ditampilkan melalui dua media yaitu komputer danLCD.
4. Kran pengisian air dapat dikontrol jika ketinggian antara sensor dengan pelampung telah mendekati jarak 10 cm dan air pun akan berhenti mengalir
ditutup oleh kran yang di gerakkan menggunakanmotor servo.
5.2 SARAN
Untuk memperbaiki atau penyempurnaan dari perancangan tugas akhir ini penulis memberikan saran, antara lain :
1. Dapat ditambahkan sensor untuk mengukur aliran air agar dapat diketahui berapa cepat aliran air yang mengalir pada penampungan.
DAFTAR PUSTAKA
1. Malvino, Paul Albert, dan Hanapi Gunawan. (1992). Prinsip-prinsip Elektronik. Jakarta : Erlangga.
2. Budiharto, Widodo & Rizal, Gamayel. (2007). 12 Proyek Mikrokontroler Untuk Pemula. Jakarta : Elex Media Komputindo.
3. Argianto, argi, Bascom AVR mania, ATMega8535 dan fungsinya, Februari 2011 (http://argi_argianto.blogspot.com diakses 9 April 2011).
4. Zal, Fahmi, Fahmizal-Note, Mengenal Bahasa BASIC pada BASCOM AVR, Mei 2011 (http://fahmizal-note.web.id diakses 14 Juni 2011).
5. Zal, Fahmi, Fahmizal-Note, Tutorial BASCOM AVR, Mei 2011 (http://fahmizal-note.web.id diakses 14 Juni 2011).
6. Mujahidin, Microholic-Mania, Interface LCD dengan Mikrokontroler AVR ATMega8535, Desember 2010 (http://iddhien.com, diakses 10 Januari 2011). 7. Rafiuddin, Rahmat, Belajar Sendir Mkrokontroler AVR seri ATMega,
DAFTAR RIWAYAT HIDUP
Penulis dilahirkan di Bandung pada tanggal 10 Januari 1989. Merupakan putra terakhir dari lima bersaudara dari bapak Wiwih Susanto dan ibu Herlin Herlina. Penulis menyelesaikan Sekolah Dasar di SD Negeri Cihampelas I Bandung pada tahun 2000 dan pada tahun yang sama melanjutkan Sekolah Menengah Pertama di SMP Negeri 6 Bandung dan selesai pada tahun 2003. Setelah menyelesaikan pendidikan di SMP selama tiga tahun, penulis melanjutkan pendidikan Sekolah Menengah Umum di SMA Pasundan 2 Bandung.
Pada tahun 2006 penulis terdaftar sebagai mahasiswa Universitas Komputer Indonesia pada Program Studi Teknik dan Ilmu Komputer, jurusan Teknik Komputer.
Selama mengikuti perkuliahan, penulis menjadi asisten laboratorium mata
kuliah Elektronika pada tahun ajaran 2008/2009. Pada tahun 2008 penulis menjadi anggota tim Robotika Universitas Komputer Indonesia pada Divisi Robot