ABSTRAK
Perkembangan teknologi telah berkembang dengan pesat khususnya teknologi robotika. Teknologi ini tidak hanya berkembang dalam dunia industri saja, akan tetapi teknologi robot sudah berkembang menjadi salah satu media edukasi dan permainan bagi anak-anak sekolah dasar.
Perancangan robot yang ada selain berfungsi untuk memudahkan pekerjaan manusia dapat juga di jadikan sebagai prasarana edukasi di dunia pendidikan dengan memberikan metode-metode yang mudah dimengerti oleh user atau pemakai. Salah sattu cara untuk mengenalkan robot yaitu dengan dibuatnya mobile robot terkendali ini yang pengendaliannya menggunakan personal komputer.
Perancangan mobile robot terkendali ini akan dijalankan pada lintasan yang telah dibuat. Perancangan mobile robot ini memanfaatkan personal komputer dan mikrokontroler sebagai pengendali motor DC. Personal komputer berfungsi sebagai kendali yang akan mengatur jalannya mobile robot. Personal komputer ini akan mengontrol mobile robot dengan memberikan data ke mikrokontroler melalui komunikasi serial RS232. Mikrokontroler sebagai pengolah data dari komputer akan mengirimkan data ke driver motor DC sebagai pengendali putaran roda mobile robot. Untuk sumber tegangan motor DC digunakan baterai 1,2 volt berjumlah 9 buah dan untuk sumber tegangan mirokontroler digunakan baterai 9 volt.
Perancangan mobile robot ini diharapkan dapat menjadi sarana edukasi bagi siswa-siswi sekolah dasar untuk memperkenalkan teknologi robotika sedini mungkin.
PERANCANGAN MOBILE ROBOT TERKENDALI
SEBAGAI SARANA EDUKASI
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Progam Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Disusun Oleh :
Shandy Permadi (10203077)
Pembimbing :
Sri Nurhayati, S.Si., M.T.
Hidayat, S.Kom.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
DAFTAR GAMBAR
Gambar 2.1 Mikrokontroler AT89S514 ... 4
Gambar 2.2 Register TMOD... 12
Gambar 2.3 Register TCON ... 12
Gambar 2.4 Register TMOD pada Mode 1... 13
Gambar 2.5 Register IE... 13
Gambar 2.6 Register SCON... 14
Gambar 2.7 Register SCON Mode 1 UART ... 15
Gambar 2.8 Konektor DB-9 pada bagian belakang CPU ... 17
Gambar 2.9 Max 232 ... 18
Gambar 2.10 Motor DC Magnet Permanen... 19
Gambar 2.11 Baterai Ni-MH 2500 mAh ... 20
Gambar 2.12 Pengiriman karakter ‘A’ tanpa bit paritas ... 21
Gambar 2.13 Level tegangan RS232 pada pengiriman karakter ‘A’ tanpa bit paritas ... 22
Gambar 2.14Tampilan Integrated Development Environment (IDE) visual Basic ... 30
Gambar 3.1 Diagram Blok Sistem ... 32
Gambar 3.2 Rangkaian Mikrokontroler... 34
Gambar 3.3 Rangkaian Driver Motor DC... 35
Gambar 3.4 Rangkaian RS232... 37
Gambar 3.5 Diagram Alir Program Visual Basic ... 39
Gambar 3.6 Rancangan menu Utama ... 40
Gambar 3.7 Tampilan pada personal komputer ... 41
Gambar 3.8 Contoh tampilan setelah input data... 42
Gambar 3.9 Diagram Proses Memprogram Mikrokontroler... 42
DAFTAR ISI
2.4 Catu Daya ... 20
2.5 Tinjauan Perangkat Lunak ... 21
2.5.1 Tata Cara Komunikasi Data Serial ... 21
2.5.2 Karakteristik Sinyal Port Serial ... 22
2.5.3 Base Addres Port Serial Komputer ... 22
2.5.4 Pengaksesan Port Serial Dengan Visual Basic 6.0 ... 27
2.5.4.1 Pengaksesan Secara Langsung Melalui Register UART... 27
2.5.4.2 Pengaksesan Port Serial Dengan Control MSComm ... 28
2.6 Pengertian Visual Basic ... 29
BAB III PERANCANGAN 3.1Diagram Blok Sistem... 32
3.2Cara Kerja Sistem ... 33
3.3Perancangan Perangkat Keras... 33
3.3.1 Rangkaian Mikrokontroler... 33
3.3.2 Rangkaian Driver Motor DC ... 34
3.4.1 Perancangan Perangkat Lunak untuk PC ... 38
3.4.1.1 Diagram Alir Program Visual Basic ... 39
3.4.1.2 Perancangan Menu Utama ... 40
3.4.1.3 Format Pengiriman Data ... 40
3.4.1.4 Tampilan Software Pada PC ... 41
3.4.1.5 Tampilan Setelah Input Data ... 42
3.4.2 Perancangan Perangkat Lunak untuk Mikrokontroler ... 42
3.4.2.1 Pengaksesan Perangkat Lunak Pada Mikrokontroler ... 43
BAB IV ANALISIS DAN UJI COBA
4.1 Percobaan Gerak Maju ... 48 4.2 Percobaan Gerak Belok Kanan dan Belok Kiri ... 50
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan ... 52 5.2Saran ... 53
DAFTAR PUSTAKA ... 54
LAMPIRAN A – SKEMA RANGKAIAN
DAFTAR PUSTAKA
(1) Budiharto, Widodo (2006). Belajar Sendiri Membuat Robot Cerdas. Jakarta: Elek Media Komputindo.
(2) Komputer, Wahana.(2004). Tutorial Membuat Program dengan Visual Basic. Jakarta: Salemba Infotek.
(3) Kurniadi, Adi. (2003). Pemrograman Microsoft Visual Basic 6. Jakarta: Elex Media
Komputindo.
(4) Nalwan, P.A. (2003). Teknik Antarmuka dan Pemrograman Mikrokontroler. Jakarta: Elek Media Komputindo.
(5) Retra, P., & Catur, E. (2004). Teori dan Praktek Interfacing Port Paralel dan Port Serial Komputer dengan Visual Basic 6.0. Yogyakarta: Andi.
DAFTAR TABEL
Tabel 2.1 Contoh Instruksi MCS-51... 8
Tabel 2.2 Fungsi-Fungsi Alternatif pada Port 3... 10
Tabel 2.3 Alamat vektor interupsi ... 14
Tabel 2.4 Mode komunikasi ... 15
Tabel 2.5 Konfigurasi pin dan nama sinyal konektor serial DB-9 ... 17
Tabel 2.6 Alamat dasar port serial pada komputer ... 22
Tabel 2.7 Tabel alamat register Com Serial... 23
Tabel 2.8 Daftar pembagi untuk berbagai baudrate pada frekwensi kristal 1,8432MHz.... 24
Tabel 2.9 Interupt Enable Register ... 24
Tabel 2.10 Interupt Identification Register... 25
Tabel 2.11 Line Control Register... 25
Tabel 2.12 Modem Control Register ... 26
Tabel 2.13 Line Status Register ... 26
Tabel 2.14 Modem Status Register... 27
Tabel 2.15 Alamat dan lokasi bit pada register UART... 27
Tabel 3.1 konfigurasi pin untuk menjalankan motor penggerak ... 36
Tabel 3.2 Tabel kebenaran untuk satu motor... 36
Tabel 3.3 Percobaan maju sekali ... 43
Tabel 4.1 Percobaan Maju Sekali Menggunakan Delay di Mikrokontroler ... 48
Tabel 4.1 Percobaan Maju Dua Kali Menggunakan Delay di Mikrokontroler... 49
KATA PENGANTAR
Segala puji dan syukur kehadirat Allah SWT, atas keagungan, rahmat dan karunia-Nya penulis dapat menyelesaikan tugas akhir ini.
Penulisan tugas akhir ini dimaksudkan untuk memenuhi salah satu syarat untuk menyelesaikan program studi Strata I di Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
Penyusunan Tugas Akhir ini tentunya tidak dapat berjalan dengan lancar dan baik tanpa adanya pihak-pihak yang telah membantu penulis untuk menyelesaikan penulisan Tugas Akhir ini. Oleh karena itu penyusun mengucapkan terima kasih kepada :
1. Kedua orang tua yang selalu memberikan nasehat dan dukungan serta selalu mendo’akan putranya.
2. Bapak Wendy Zarman, M.Si, selaku Ketua Jurusan Teknik Komputer dan wali kelas 03 TK02.
3. Ibu Sri Nurhayati, M.Si, selaku dosen pembimbing I yang telah banyak membantu penulis dalam menyelesaikan tugas akhir ini.
4. Bapak Hidayat, S.Kom selaku dosen pembimbing II dan pembimbing PKM (Program Kreativitas Mahasiswa) yang telah banyak membantu penulis dalam menyelesaikan tugas akhir ini. Khususnya dalam proses pembuatan tugas akhir di Lab. Sisdig.
5. Seluruh Staf dan pengajar Teknik Komputer Universitas Komputer Indonesia.
Terima kasih atas ilmu yang telah diberikan mudah-mudahan bermanfaat.
6. Kakak dan adikku (Dedy-Opik) yang telah banyak mendoakan penulis dalam menyelesaikan tugas akhir ini.
7. Irfan Dwiguna Sumitra yang telah banyak membantu dalam pembuatan alat. 8. Teman-teman asisten Lab Mikroprosesor (Irfan, Sri, Bernard).
9. Teman-teman asisten Lab Sisdig (Gani, Lea, Wina, Vidly).
10. Teman-teman 03TK2, dan juga bagi tekan-rekan lain yang tidak mungkin disebutkan satu persatu. Terima kasih semuanya.
Penulis menyadari bahwa Laporan Tugas Akhir ini masih banyak kekurangannya, Meskipun demikian penulis berharap semoga apa yang telah dikerjakan berguna dan bermanfaat bagi berbagai pihak.
Semoga Allah SWT memberi berkah atas semua ilmu yang kita dapatkan, Amien.
Bandung, Juli 2008
LEMBAR PENGESAHAN
PERANCANGAN MOBILE ROBOT TERKENDALI
SEBAGAI SARANA EDUKASI
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Disusun Oleh :
Shandy Permadi (10203077)
Bandung, 20 Juli 2008 Menyetujui,
Pembimbing I Pembimbing II
Sri Nurhayati, S.Si., M.T Hidayat, S.Kom
NIP. 4127.70.05.013 NIP. 4127.70.05.011
Mengetahui,
4.4 Bentuk Fisik Mobile Robot
Berikut ini adalah bentuk fisik dari perancangan mobile robot terkendali.
Gambar 4.3 Mobile robot tampak samping depan
Mobile robot memiliki panjang 20cm, lebar 11cm, tinggi 10cm, dan berat gr
872
Gambar 4.5 Mobile robot tampak dari atas
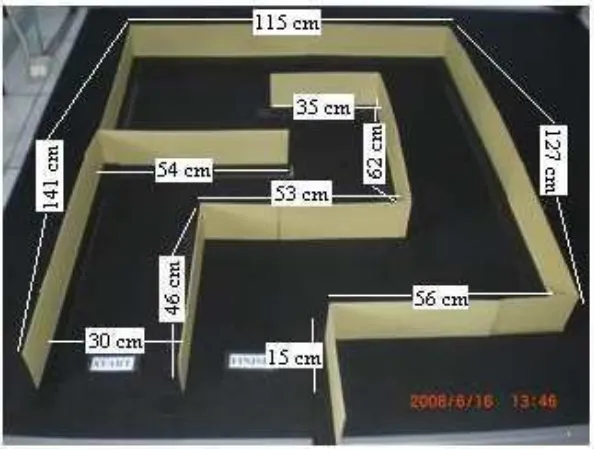
Gambar 4.7 Labirin