PENGANTAR
Assalamu’alaikum wr.wb.
Mata Kuliah Teknik Kendali adalah mata kuliah wajib 2 sks dengan kode mata kuliah TMU 462 pada semester 4 di Program Studi Teknik Mesin. Dengan mengikuti mata kuliah ini diharapkan mahasiswa menguasai analisis dasar sistem kendali yang meliputi: sistem kendali umpan balik, model matematik, blok diagram, alih bentuk Laplace, fugsi alih, dan kestabilan. Disamping menguasai analisis sistem kendali mahasiswa diharapkan juga mampu memahami pengendalian di industri yang meliputi : Kendali On-Off, kendali proporsional, kendali integral serta kendali proporsional-integral untuk proses pengendalian panas, mekanika, listrik, dan fluida.
Diktat Teknik Kendali disusun dalam rangka mendukung pencapaian kompetensi yang diharapkan pada mata kuliah Teknik Kendali
Banyak kekurangan yang ada pada diktat sederhana ini, oleh karenanya masukan dari pembaca akan sangat berguna bagi penyempurnaan diktat kuliah ini.
Yogyakarta, Februari 2016
Bambang Riyanta, S.T.,M.T.
DAFTAR ISI
Pengantar
BAB I
Pendahuluan………...…..4
BAB II Kendali Manual, Kendali Otomatis Kendali Loop Terbuka
dan Kendali Loop Tertutup……….……6
BAB III Model Matematik Sistem Fisik
dan Respon Sistem………. …....13
BAB V Aksi Kendali dalam Industri(berisi : Kendali ON-
OFF, Kendali Proporsional, Integral dan Differensial)………... ………..43
BAB VI Kestabilan Sistem……….. ……….55
Daftar Pustaka
BAB I
Sistem Kendali adalah : susunan komponen-komponen fisik yang saling dihubungkan sedemikian rupa sehingga memerintah, mengarahkan atau mengatur dirinya sendiri atau sistem lain
Aplikasi sistem pengendalian tidak hanya mencakup bidang keteknikan, melainkan juga menyangkut ilmu biologi dan ilmu sosial. Dimensi-dimensi tambahan ini telah menciptakan begitu banyak masalah baru sehingga analisis dan perancangan sistem sesungguhnya telah menjadi sebuah ilmu tersendiri.
Titik berat utama dalam teknologi pengendalian modern adalah pengembangan model-model matematis untuk berbagai sistem fisis. Instrumen matematis dipergunakan untuk mempermudah memahami serta menganalisis sistem fisis .
penyederhanaan akan menuju ke sistem-sistem yang bisa diuraikan oleh persamaan diferensial biasa linier.
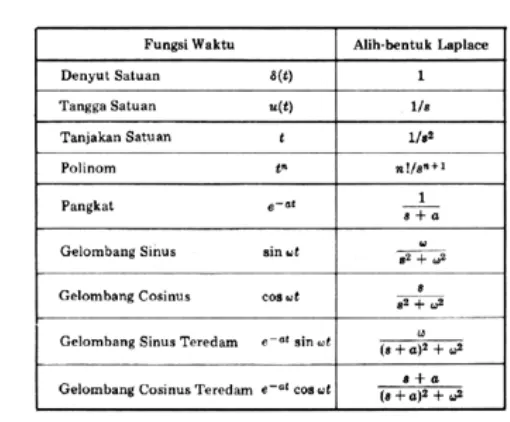
Cara-cara untuk menyelesaikan persamaan-persamaan matematis telah cukup tercatat dalam kepustakaan matematika dan teknik . Instrumen matematik transformasi Laplace misalnya, sangat umum digunakan untuk mentransformasi bentuk persamaan diferensial sebuah sistem dinamik pada domain t menjadi persamaan aljabar biasa pada domain s . Model matematik sistem dalam bentuk aljabar biasa ini lebih sederhana dan mudah dikelola dengan kaidah aljabar untuk mendapatkan respon sistem ketika menerima input.
Instrumen Diagram blok diperlukan untuk menampilkan komponen-komponen yang berperan dalam sistem fisis beserta hubungan antar bagian dalam sistem tersebut. Dalam diagram blok komponen-komponen sistem fisik di tampilkan dalam bentuk blok-blok fungsional. Anak panah menunjukkan aliran sinyal dari sistem dimaksud.
komponen yang terletak di dalam sistem atau subsistem) sedemikian rupa agar tindakan pengendalian yang tepat sebagai fungsi dari keluaran dan masukannya bisa dilakukan.
BAB II
Kendali Manual,
Otomatis,
Loop Terbuka &
Loop Tertutup
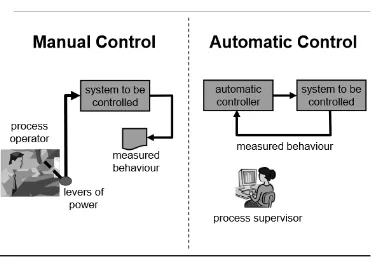
Teknologi kontrol pertama kali dikembangkan memanfaatkan manusia sebagai pengontrolnya (kendali manual) , setelah teknologi mesin, elektronik dan komputer ditemukan mulailah tenaga manusia diganti dengan peralatan tersebut sehingga disebutlah istilah kontrol otomatis (kendali otomatis ). Gambar berikut menunjukkan perbedaan konsep pengendalian manual dan otomatis serta aplikasinya
Gambar 2. Aplikasi kendali manual pada pengaturan suhu uap
Gambar 3. Aplikasi kendali otomatis pada pengaturan suhu uap
Meski flexible kendali manual memiliki kelemahan pada rendahnya tingkat presisi dan akurasi. Berbeda dengan kendali manual kendali otomatis lebih akurat dan presisi meskipun konsekwensinya tidak flexibel .
II.1. Kendali loop terbuka dan loop tertutup Sistem Kontrol Loop Tertutup (closed-loop
Gambar 4. Diagram Sistem Kontol Loop Tertutup
Sistem Kontrol Loop Terbuka (open-loop
control system) : adalah sistem kontrol
yang keluarannya tidak berpengaruh pada
aksi pengendalian.
Gambar 5. Diagram Sistem Kontol Loop Terbuka
II.2. Aplikasi kendali loop loop dan tertutup terbuka
Aplikasi kendali loop tertutup antara lain :
a.
Pengkondisi
Aplikasi kendali loop terbuka antara lain :
a.
Lampu Lalu
c. Kipas angin b. Setrika
listrik c. Fly by wire system
II.2. Catatan untuk kendali loop loop dan tertutup
terbuka
Kendali loop tertutup
- Menggunakan aksi umpan balik untuk memperkecil kesalahan sistem.
- Penggunaan umpan-balik membuat respon sistem relatif kurang peka terhadap gangguan eksternal dan perubahan internal pada parameter sistem.
d. Mesin Cuci
- Dapat digunakan komponen-komponen dengan ketelitian lebih rendah dan murah untuk mendapat pengendali plant dengan teliti yang tidak mungkin diperoleh pada sistem loop terbuka.
- Kestabilan merupakan persoalan utama karena cenderung terjadi kesalahan akibat koreksi berlebihan yang dapat menimbulkan osilasi.
- Sistem kontrol loop tertutup mempunyai kelebihan hanya jika terdapat gangguan/perubahan yang tidak dapat diramal pada komponen sistem
- Membutuhkan komponen-komponen dengan ketelitian tinggi dan relatif mahal.
Kendali loop terbuka
- Keluarannya tidak diukurkan atau diumpan-balikan untuk dibandingkan dengan masukan acuan.
- Ketelitian sistem bergantung pada kalibrasi.
diketahui dan tidak terdapat gangguan internal maupun eksternal.
- Setiap sistem kontrol yang bekerja pada basis waktu adalah loop terbuka.
- Konstruksinya sederhana dan perawatannya mudah.
- Lebih mudah dibuat dan lebih murah
- Kestabilan bukan merupakan persoalan utama.
- Untuk sistem dengan masukan yang telah diketahui sebelumnya dan tidak ada gangguan, maka disarankan untuk menggunakan kontrol loop terbuka.
BAB III
Model Matematik Sistem Fisik
Dan respon sistem
III.1. Model Matematik Sistem Fisik
Pada analisis dan desain sistem kendali, diperlukan permodelan sistem fisis. Model fisis ini harus dapat menggambarkan karakteristik sistem tersebut secara memadai. Dari model fisis diturunkan model matematis. Model matematis diartikan sebagai hubungan matematik yang menghubungkan keluaran sistem dengan masukannya. Model matematis diperoleh dari hukumhukum fisis sistem yang bersangkutan seperti dinamika sistem mekanis yang dimodelkan dengan hokum Newton, dinamika sistem elektrik dimodelkan dengan hukumhukum Kirchoff, ohm dll.
Model matematis digunakan untuk memperkirakan bagaimana sistem akan memberikan tanggapan pada kondisi spesifik yang pasti tanpa menguji sistem fisik yang sebenarnya. Suatu sistem yang memiliki model matematis sama tidak selalu menggambarkan model fisis yang sama (misal : analogi sistem mekanis dengan sistem elektrik).
Model Matematik Sistem Mekanik
Pada sistem mekanik untuk mencari persamaan karakteristik system banyak menggunakan Hukum Newton.
Gerakan Translasi: ΣF = m a Gerakan Rotasi: Στ = J α
dengan :
F = gaya yang bekerja pada massa m m = massa benda
a = percepatan benda
τ = torsi yang bekerja pada benda J = momen inersia benda
α = percepatan sudut
Contoh:
o
Sistem Mekanik Pegas
o Sistem mekanik roda gigi
Rodagigi n1 diputar oleh torsi Τ1, menghasilkan torsi Τ2pada Roda gigi n2
ω
2ω
1=
r
1r
2=
n
1n
2: = n
Speed conversion n := gear ratio
T11 = T22
Energy /power conservation
= T1
T2
=ω2
ω1
=n
Torque conversion
=
T
1n
=
T2=
J
2
J
2n
J
1
n
2J
2
J
1= n
2J
2o Sistem mekanik Pengungkit
∑MA = 0
F1 x l1 = F2 x l2
F2 =
F
1
x l
1
l
2
o Sistem mekanik Dashpot
Keseimbangan gaya arah y
∑Fy = 0
- F1 + f
dy
(
t
)
dt
= 0F1 = f
dy
(
t
)
dt
Latihan
Sistem mekanik seperti gambar berikut: dengan :
F(t) = gaya yang bekerja pada massa m K = konstanta pegas
B = konstanta daspot (peredam viscos) Y(t) = simpangan pegas
Carilah model matematik
sistem mekanik tersebut dengan
Y(t) sebagai output dan F(t) sebagai input.
o Model matematik system elektrik
Pada sistem elektrik untuk mencari persamaan karakteristik system banyak menggunakan Hukum-hukum pada rangkaian listrik. Hukum ohm, persamaan tegangan Kirchoff, dan arus Mesh
Resistor
Model matematik :
VR(t) = IR(t).R
Kapasitor
Model matematik :
Vc(t) =
1
C
∫I
C (t)dt VCC
I
c Induktor
Model matematik :
VL(t) = L
d i
L(
t
)
dt
Latihan
Sebuah rangkaian listrik terdiri dari komponen RLC dengan tegangan input Vi dan tegangan
output Vo ditampilkan dalam gambar berikut :
R L
Vi Vo
Carilah model matematik dari system listrik tersebut !
III.2. Respon Sistem
L
I
LIII.2.1 Pengertian Respon Sistem
Respon sistem atau tanggapan sistem adalah perubahan perilaku output terhadap perubahan sinyal input. Respon sistem berupa kurva ini akan menjadi dasar untuk menganalisa karakteristik system selain menggunakan persamaan/model matematika. Bentuk kurva respon sistem dapat dilihat setelah mendapatkan sinyal input. Sinyal input yang diberikan untuk mengetahui karakteristis system disebut sinyal test. Ada 3 tipe input sinyal test yang digunakan untuk menganalisa system dari bentuk kurva response:
Impulse signal, sinyal kejut sesaat
Step signal, sinyal input tetap DC secara
mendadak
Ramp signal, sinyal yang berubah mendadak
(sin, cos).
III.2.2. Cara memperoleh respon sistem
Pada sistem dinamik , persamaan karakteristik system melibatkan persamaan differensial, sehingga ketika diberikan sinyal input tidak mudah memperoleh respon sistemnya secara langsung.
domain s. Instrumen transformasi yang banyak digunakan adalah transformasi Laplace. Model matematik sistem dalam bentuk aljabar biasa ini lebih sederhana dan mudah dikelola dengan kaidah aljabar untuk mendapatkan respon sistem ketika menerima input. Setelah manipulasi model matematik dalam domain s , persamaan karakteristik ditransformasi Laplace balik (invers Laplace) ke domain t. Parameter input kemudian di masukkan ke dalam persamaan untuk mendapatkan respon sistem.
Latihan
Non Differential Equation f(t)
L
-1 (F(s))Time Domain f(s) Equation f(t) Algebraic Equation
f(s) Algebraic Manipulation
Algebraic Differential
Equation
Laplace Domain
L
(f(t))L
(
f
(
t
))=
∫
0
∞
Transformasi Laplace
1. Tentukan alih bentuk Laplace dari fungsi f(t)= e-t
Jawab:
2. Tentukan alih bentuk Laplace fungsi tanjakan f(t)= t
Jawab
Pilih satu jawaban
1/s -5/(s-3)
-1/(s+3)
5/s
Tidak ada jawaban yang benar
4. F(s) = 1 adalah alih bentuk dari fungsi f(t) berbentuk:
Pilih satu jawaban
Satuan tanjakan f(t) = t
Satuan undakan f(t) = 1(t)
Satuan denyut f(t) = (t)
Sinyal sinus
Tidak ada jawaban yang benar
Latihan
Transformasi Laplace balik
1. Tentukan alih bentuk Laplace dari
3
e-t– e
-2t Jawab:maka:
2. Tentukan alih bentuk Laplace balik dari
Jawab
III.2.3 Bentuk sinyal respon sistem
Respon sistem atau tanggapan sistem terbagi dalam dua domain/kawasan:
Domain waktu (time response)
Domain frekuensi (frequency response)
domain respon sistem
Respon Peralihan (transient response)
Bentuk sinyal respon transien
Bentuk sinyal respond transient ada 3:
Underdamped response, output melesat
naik untuk mencapai input kemudian turun dari nilai yang kemudian berhenti pada kisaran nilai input. Respon ini memiliki efek osilasi
Critically damped response, output tidak
melewati nilai input tapi butuh waktu lama untuk mencapai target akhirnya.
Overdamped response, respon yang dapat
mencapai nilai input dengan cepat dan tidak melewati batas input.
maka dikatakan sistem ini stabil. Jika sistem tidak stabil, output akan meningkat terus tanpa batas sampai sistem merusak diri sendiri atau terdapat rangkaian pengaman yang memutus sistem.
Sensitifitas sistem
adalah perbandingan antara persentase perubahan output dengan persentase perubahan input. Perubahan pada input bisa normal atau ada gangguan dimana parameter proses akan berubah seiring dengan usia, lingkungan, kesalahan kalibrasi dsb. Pada sistem siklus tertutup tidak terlalu sensitif terhadap hal ini karena adanya proses monitoring balik/feedback. Kondisi sebaliknya terjadi pada sistem siklus terbuka. Pemilihan sistem siklus terbuka harus memperhatikan spesifikasi beban dan kapasitas sistem.
Klasifikasi Respon Sistem
Berdasarkan sinyal bentuk sinyal uji yang digunakan, karakteristik respon sistem dapat diklasifikasikan atas dua macam, yaitu:
o Karakteristik Respon Waktu (Time Respons),
Spesifikasi Respon Transient, adalah
spesifikasi respon sistem yang diamati mulai saat terjadinya perubahan sinyal input/gangguan/beban sampai respon masuk dalam keadaan steady state. Tolak ukur yang digunakan untuk mengukur kualitas respon transient ini antara lain;
rise time, delay time, peak time, settling time, dan % overshoot.
Spesifikasi Respon Steady State,
adalah spesifikasi respon sistem yang diamati mulai saat respon masuk dalam keadaan steady state sampai waktu tak terbatas (dalam praktek waktu pengamatan dilakukan saat TS t 5TS). Tolok ukur yang digunakan untuk mengukur kualitas respon
steady state ini antara lain; %eror steady state baik untuk eror posisi, eror kecepatan maupun eror percepatan
o Karakteristik Respon Frekuensi
(Frequency Respons)
karakter respon frekuensi adalah karakteristik respon yang spesifikasi performansinya didasarkan pengamatan magnitude dan sudut fase dari penguatan/gain (output/input) sistem untuk masukan sinyal sinus (A sin
t). Tolak ukur yang digunakan untuk mengukur kualitas respon frekuensi ini antara lain;
Frequency Gain Cross Over,
Frequency Cut-Off (filter),
Frequency Band-Width (filter),
Gain Margin,
Phase Margin,
Slew-Rate Gain dan lain-lain.
o Karakteristik Respon Waktu Sistem Orde I dan Sistem Orde II
Respon output sistem orde I dan orde II, untuk masukan fungsi Impulsa, step, ramp dan kuadratik memiliki bentuk yang khas sehingga mudah diukur kualitas responnya (menggunakan tolok ukur yang ada). Pada sistem orde tinggi umumnya memiliki bentuk respon yang kompleks atau tidak memiliki bentuk respon yang khas, sehingga ukuran kualitas sulit ditentukan. Meskipun demikian, untuk sistem orde tinggi yang ada dalam praktek (sistem yang ada di industri), umumnya memiliki respon menyerupai atau dapat didekati dengan respon orde I dan II. Untuk sistem yang demikian dapatlah dipandang sebagai sistem orde I atau II, sehingga ukuran kualitas sistem dapat diukur dengan tolok ukur yang ada.
Adalah karakteristik sistem yang didapatkan dari spesifikasi respon output terhadap masukan impulsa.
Menguji Respon System
[image:31.420.128.353.346.476.2]Salah satu cara untuk menguji dan menganalisa suatu sistem adalah dengan memberikan suatu sinyal uji (test signal) sebagai masukan dan mengamati serta menganalisa keluarannya. Berbagai sinyal masukan dapat digunakan untuk keperluan analisa yang berbeda-beda. Jika sistem yang digunakan untuk keperluan masukan dengan kenaikan gradual sepanjang waktu, maka digunakan sinyal uji fungsi ramp. Sinyal fungsi step digunakan untuk menguji keandalan terhadap gangguan luar, dsb.
Contoh 1 :
Sebuah sistem orde 1 ditampilkan dalam diagram blok berikut :
Fungsi alih loop tertutup sistem tersebut adalah :
C
(
s
)
R
(
s
)
=1
Ts
+
1
Bila sistem tersebut diuji menggunakan input fungsi unit step
r(t) = 1 ;
R(s) = L [ r(t) ] =
1
s
Bila dimasukkan ke dalam persamaan fungsi alih loop tertutup diperoleh :
C(s) =
Ts
1
=
1
s
-
1
s
+
1
T
Dengan invers Laplace L-1 [
1
s
-
1
s
+
1
T
]
diperoleh :
=
C(t) = 1- e
-t/TPlotting C(t) terhadap waktu untuk t ≥ 0 ditampilkan pada grafik berikut :
Contoh 2.
r(t) = t ;
R(s) = L [ r(t) ] =
1
s
2Bila dimasukkan ke dalam persamaan fungsi alih loop tertutup diperoleh :
C(s) =
Ts
1
+
1
.
1
s
2=
1
s
2-
T
s
−
T
2Ts
+
1
Dengan invers Laplace L-1 [
1
s
2-
T
s
−
T
2Ts
+
1
]
diperoleh :
=
C(t) = t- T + Te
-t/TBAB IV
DIAGRAM BLOK
IV.1. Pengertian , Fungsi dan Bentuk
Pengertian
Suatu penyajian bergambar dari fungsi yang dilakukan oleh tiap komponen sistem dan aliran sinyalnya.
Fungsi
E(s)
C(s)
R(s)
Bentuk
X(s) : Sinyal masukan
Y(s) : Sinyal Keluaran
o Komparator : Detektor Kesalahan
o Diagram Blok system loop tertutup
Y(s
)
G(s
)
E(s
C(s
o Pengaruh Gangguan pada system loop tertutup
IV.2. Prosedur Penggambaran diagram Blok
1. Tulis persamaan karakteristik setiap
elemen sistem
2. Transformasi persamaan karakteristik
elemen sistem dari domain t ke domain s
menggunakan Transformasi Laplace
3. Tulis Fungsi alih setiap elemen sistem
G1(s
)
E(s
)
C(s
)
R(s
)
Gangguan N(s)
4. Tampilkan fungsi alih setiap elemen dalam
blok yang sesuai
5. Rakit semua elemen menjadi diagram blok
lengkap
Contoh :
Tinjau rangkaian RC pada gambar berikut :
Persamaan karakteristik setiap elemen pada system tersebut adalah :
Elemen 1
i =
e
i−
e
oR
Elemen 2
e
o=
∫
i dt
C
Transformasi Laplace untuk persamaan pertama dengan syarat awal 0 diperoleh :
R Elemen 1 Elemen 2 i
C eo
I(s)
E0(s)
Ei(s)
Elemen 1
L
[i
=
e
i−
e
oR
]
I(s) =
E
i(
s
)−
E
0(
s
)
R
Diagram blok elemen 1
Elemen 2
L
[e
o =∫
i dt
C
]
E
0(s) =
I
Cs
(
s
)
Diagram blok elemen 2
E0(s)
Ei(s)
Diagram blok keseluruhan hasil rakitan elemen 1 dan elemen 2
IV.2. Penyederhanaan Diagram Blok
Syarat penyederhanaan diagram blok
1. Hasil Kali umpan maju harus sama
Berikut ditampilkan contoh-contoh penyederhanaan diagram blok
Contoh 3
BAB V
Aksi Kendali
dalam industri
V.1. Aksi Kontrol Dasar (Metoda Pengaturan)
Kontrol ON-OFF (Kontrol Dua Posisi)
Aksi kontrol dua posisi atau on-off. Dalam sistem kontrol dua posisi, elemen pembangkit hanya mempunyai dua posisi tertentu yaitu on dan off. Kontrol dua posisi atau on-off relatif sederhana dan tidak
mahal dan dalam hal ini sangat banyak digunakan dalam sistem kontrol industri maupun domestik.
Ambil sinyal keluaran dan kontroler u(t) tetap pada salah satu nilai maksimum atau minimum tergantung apakah sinyal pembangkit kesalahan positif atau negatif, sehingga,
u(t) = U1 untuk e(t) > 0
= U2 untuk e(t) < 0
dengan U1 dan U2 konstan. Nilai minimum U2
biasanya nol atau –U1. Kontroler dua posisi umumnya
Gambar. Kontroler beroperasi otomatis.
Gambar (a) Diagram blok kontroler on-off; (b) diagram blok kontroler on-off dengan jurang diferensial
kesalahan telah bergerak mendekati nilai nol. Dalam beberapa kasus jurang diferensial terjadi sebagai akibat adanya penghalang yang tidak dikehendaki dan gerakan yang hilang, sering juga hal ini dimaksudkan untuk mencegah operasi yang berulang-ulang dan mekanisme on-off.
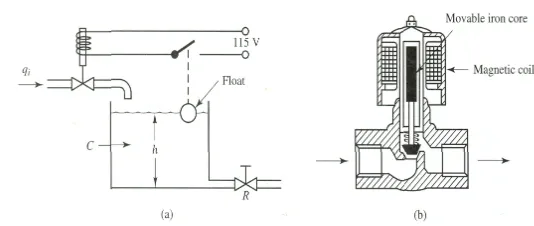
Tinjau sistem kontrol tingkat cairan pada Gambar di bawah digunakan untuk mengontrol laju aliran masuk. Katup ini bisa dalam posisi terbuka atau tertutup. Dengan sistem kontrol dua posisi ini, laju aliran masuk dapat positif, tetap, atau nol.
[image:52.420.84.351.346.459.2]
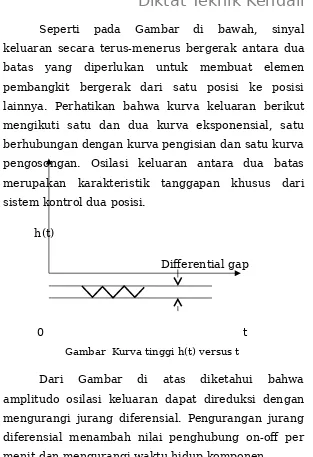
Seperti pada Gambar di bawah, sinyal keluaran secara terus-menerus bergerak antara dua batas yang diperlukan untuk membuat elemen pembangkit bergerak dari satu posisi ke posisi lainnya. Perhatikan bahwa kurva keluaran berikut mengikuti satu dan dua kurva eksponensial, satu berhubungan dengan kurva pengisian dan satu kurva pengosongan. Osilasi keluaran antara dua batas merupakan karakteristik tanggapan khusus dari sistem kontrol dua posisi.
h(t)
Differential gap
[image:53.420.69.382.52.509.2]
Gambar Kurva tinggi h(t) versus t
Dari Gambar di atas diketahui bahwa amplitudo osilasi keluaran dapat direduksi dengan mengurangi jurang diferensial. Pengurangan jurang diferensial menambah nilai penghubung on-off per menit dan mengurangi waktu hidup komponen.
Besaran jurang diferensial harus ditentukan dari pengamatan seperti ketepatan yang diperlukan dan waktu hidup komponennya.
Kendali on-off memiliki sifat :
1. Mesin berputar dengan kecepatan penuh atau mati
2. Peralatan cepat rusak karena pada posisi hidup-mati berulang-ulang
3. Tidak bisa mencapai nilai yang diinginkan hanya berosilasi di sekitar nilai yang diinginkan
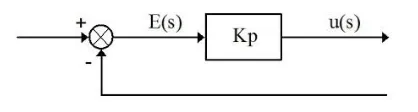
Kontrol Proporsional (P)
Untuk kontroler dengan aksi kontrol proporsional, hubungan antara masukan kontroler u(t) dan sinyal pembangkit kesalahan e(t) adalah
u(t) = K
pe(t)
atau dalam besaran transformasi Laplace
U
(
s
)
E
(
s
)
= KpGambar 2.5. Diagram blok kontroller proporsional
response berisolasi, dengan cara demikian memperpanjang setting waktu. Sebaliknya perubahan respon dari input sebaiknya secepat mungkin. Respon yang cepat dapat dicapai dengan menaikkan K, tetapi sekali lagi dapat menyebabkan ketidak stabilan sistem.
Kendali Proporsional memiliki sifat :
1. Mesin berputar dengan kecepatan proporsional dengan besarnya sinyal error 2. Keluaran tidak bisa mencapai nilai yang
diinginkan karena saat sinyal error bernilai 0 mesin mati.
3. Peralatan lebih awet dibanding pada kontrol on off karena mesin tidak hidup-mati berulang
Kontrol Integral (I)
atau
Gambar Diagam blok kontroller integral
dengan Ki adalah konstanta yang dapat diubah.
Fungsi alih dari kontroler integral adalah
kesalahan nol, nilai u(t) tetap konstan. Aksi kontrol integral biasanya disebut kontrol reset.
Kontrol Proporsional ditambah Integral (PI)
Aksi kontrol kontroler proporsional ditambah integral didefinisikan dengan persamaan berikut :
atau fungsi alihnya sebagai berikut:
dengan KP penguatan proporsional dan Ti disebut
waktu integral. Keduanya KP dan Ti dapat ditentukan.
Waktu integral mengatur aksi kontrol internal, sedang perubahan nilai KP berakibat pada bagian
Laju reset diukur dalam pengulangan per menit. Gambar di bawah menunjukkan diagram blok kontroler proporsional ditambah integral. Jika sinyal pembangkit kesalahan e(t) adalah fungsi langkah-unit
Gambar Diagram blok kontroler proporsional ditambah integral
Kontrol Turunan (Derivative) (D)
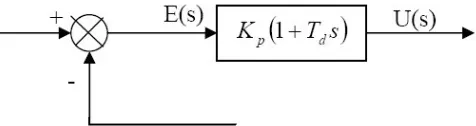
Kontrol Proporsional ditambah Turunan (PD)
Aksi kontrol proporsional ditambah turunan didefinisikan dengan persamaan berikut.
dan fungsi alihnya adalah:
dengan KP adalah penguatan proporsional dan Td
konstanta yang disebut waktu turunan. KP dan Td
keduanya dapat ditentukan. Aksi kontrol turunan kadang kadang disebut laju kontrol dengan besaran keluaran kontroler proporsional ke laju perubahan sinyal pembangkit kesalahan. Waktu turunan Td
Gambar Diagram blok kontroler proporsional ditambah turunan
Gambar di atas menunjukkan diagram blok kontroler proporsional ditambah turunan. Aksi kontrol turunan mempunyai karakter antisipasi. Namun demikian, aksi kontrol turunan tidak dapat mengantisipasi aksi lain yang belum pernah dilakukan.
Satu pihak aksi kontrol mempunyai keuntungan mengantisipasi, tapi di pihak lain juga mempunyai kelemahan yaitu adanya gangguan sinyal penguatan yang dapat bercampur pada pembangkit (aktuator).
Kontrol Proporsonal ditambah Integral ditambah Turunan (PID)
Kombinasi dari aksi kontrol proporsional, aksi kontrol integral, dan aksi kontrol turunan disebut aksi kontrol proporsional ditambah integral ditambah turunan. Kombinasi ini mempunyai keuntungan dibanding masing-masing kontroler. Persamaan dengan tiga kombinasi ini diberikan oleh :
atau fungsi alihnya
dengan KP penguatan proporsional, Ti waktu integral,
dan Td waktu turunan.
BAB VI
kestabilan
Dinfinisi Kestabilan
Sistem adalah stabil jika tanggapan denyutnya mendekati nol ketika waktu mendekati tak terhingga
U(s
)
E
Sistem adalah stabil jika setiap masukan terbatas menghasilkan keluaran terbatas pula.
Kestabilan sebuah sistem ditentukan oleh tanggapannya terhadap masukan atau gangguan. Secara naluriah, system yang stabil adalah sistem yang tetap dalam keadaan diam bila tidak dirangsang oleh sumber luar dan akan kembali diam jika semua rangsangan dihilangkan. Kestabilan dapat didefinisikan dengan tepat dalam pengertian tanggapan denyut suatu system.
Penyelidikan tentang derajat kestabilan dari sebuah sistem seringkali memberikan keterangan yang berharga mengenai tingkah lakunya, yaitu, jika sistem stabil seberapa dekatkah sistem itu akan menjadi tak stabil Hal ini merupakan konsep kestabilan .relatif. Biasanya kestabilan relatif dinyatakan dalam pengertian dari suatu pararneter sistem tertentu yang diijirikan di mana sistem tersebut akan tetap stabil.
Syarat Sistem Stabil
Suatu syarat perlu agar sistem menjadi stabil adalah bahwa bagian-bagian nyata dari akar-akar persamaan ciri mempunyai bagian-bagian nyata negatif.
Dari persamaan ciri R(s) = 0 mempunyai akar-akar yang disebut dengan kutub (poles).Suatu syarat perlu agar sistem menjadi stabil adalah bahwa bagian-bagian nyata dari akar-akar persamaan ciri mempunyai bagian-bagian nyata negatif atau Re(s) negatif. Hal tersebut untuk menjamin tanggapan denyutnya (keluaran) akan susut seeara eksponensial bersama waktu, oleh karena untuk e-t = 0 untuk t
mendekati .
Analysis Kestabilan System menggunakan Methode Routh
o Transfer function dari suatu sistem loop tertutup berbentuk :
o Hal pertama à memfaktorkan A(s)
o A(s) : persamaan karakteristik
o Pemfaktoran polinomial dengan orde lebih dari 2 cukup sulit, sehingga digunakan
o Kriteria Kestabilan Routh
o Kriteria kestabilan Routh memberi informasi ada tidaknya akar positif pada persamaan karakterisitik bukan
nilai akar tersebut
Prosedur Analysis Kestabilan System menggunakan Methode Routh
1. Tulis persamaan karakteristik sistem dalam bentuk polinomial s :
2. Semua koefisien persamaan karakteristik harus positif. Jika tidak, sistem tidak stabil.
3. Jika semua koefisien positif, susun koefisien polinomial dalam baris dan kolom dengan pola:
Proses ini diteruskan sampai baris ke-n
secara lengkap. Susunan lengkap dari
koefisien berbentuk segitiga.
Syarat perlu dan syarat cukup agar sistem
sn a
0 a2 a4 a6 .
sn−1 a
1 a3 a5 a7 .
sn−2 b
1 b2 b3 b4 .
sn−3 c
1 c2 c3 c4 .
sn−4 d
1 d2 d3 d4 .
. . . . . . . . .
s2 e 1 e2
s1 f1 s0 g
o Koefisien persamaan karakteristik semua
positif (jika semua negatif maka masing – masing ruas dikalikan minus 1 sehingga hasilnya positif)
o Semua suku kolom pertama pada tabel Routh mempunyai tanda positif.
Jika ada nilai nol lihat pada bagian “kondisi khusus”
Latihan
Contoh 1
Terapkan kriteria kestabilan Routh untuk :
Dengan semua koefisien positif. Susunan koefisien menjadi
Syarat agar semua akar mempunyai bagian real negatif diberikan :
a
0s
3+
a
1s
2+
a
2s
+
a
3=
0
s3 a
0 a2
s2 a
1 a3
s1 a1a2−a0a3
a1
a
1a
2> a
oa
3o Bila salah satu suku kolom pertama dalam suatu baris adalah nol, maka suku nol ini diganti dengan bilangan positif ε yang sangat kecil.
Contoh 2
s3 + 2s2 + s + 2 = 0
Susunan koefisiennya :
# Bila tanda koefisiennya sama, berarti terdapat pasangan akar imajiner pada sistem. Pada persamaan di atas ada akar di ± J
o Bila tanda koefisien (ε) berlawanan, berarti ada akar positif persamaan karakteristik.
Contoh 3
s3 – 3 s + 2 = (s – 1)2 (s + 2) = 0
Susunan koefisiennya adalah
s
31
1
s
22
2
s3 1 -3
berubah tanda s2 0 ≈ ε 2
s1 -3 – (2/ ε)
berubah tanda
s0 2
# Terdapat dua perubahan tanda koefisien di kolom pertama, berarti ada dua akar positif di pers. karakteristik. Sesuai dengan
persamaan awalnya à sistem tidak stabil
Keadaan Khusus
o Jika semua koefisien pada suatu baris adalah nol maka koefisien itu menunjukkan
akar – akar besaran yang sama tapi letaknya berlawanan
o Penyelesaian : menggantinya dengan turunan
suku banyak pembantu à P(s)
Contoh 4
s5 + 2s4 + 24s3 + 48s2 – 25s – 50 = 0
Susunan koefisiennya adalah
s5 1 24 -25
s4 2 48 -50 ß Suku banyak
pembantu P(s)
s3 0 0
Susunan koefisiennya adalah
s5 1 24 -25
s4 2 48 -50 ß Suku banyak
pembantu P(s)
s3 0 0
P(s) = 2s4 + 48s2 – 500
Sehingga susunan koefisiennya:
s5 1 24 -25
s4 2 48 -50
s3 8 96 ß Koefisien dari
dP(s)/ds
s2 24 -50
s1 112,7 0
s0 -50
# Ada satu perubahan tanda, berarti ada satu akar positif.
Sistem tidak stabil.
o Tinjau sistem berikut
R(s) ____K______ s(s2+s+1)(s+2)
C(s) +
-o Fungsi alih loop tertutup
o
Persamaan karakteristik
o Susunan koefisien
K s K s K s s K s 0 7 9 1 3 7 2 3 4 2 0 2 3 3 1
# Untuk kestabilan, K harus positif dan semua koefisien pada kolom pertama harus positif. Oleh karena itu,
14/9 > K > 0
DAFTAR pustaka
C
(
s
)
R
(
s
)
=
K
s
(
s
2+
s
+
1
)(
s
+
2
)+
K
1. Katsuhiko Ogata, 1970, Modern Control
Engineering , Prentice Hall inc. Englewood
Cliffs, N.J.
2. Distefano, JJ, Ph.D., Stubberud, AR, Ph.D., dan
Williams, IJ., Ph.D., Sistem Pengendalian dan Umpan
Balik, Seri Buku Schaum, Teori dan Soal, Terjemahan,
Airlangga, Surabaya, Indonesia,