SISTEM PENJEJAK MATAHARI DUA AXIS PADA PEMBANGKIT LISTRIK TENAGA SURYA
TUGAS AKHIR
Diajukan Guna Memenuhi Persyaratan Untuk Mencapai Derajat Strata-1
Pada Jurusan Teknik Elektro Fakultas Teknik
Universitas Muhammadiyah Yogyakarta
Disusun Oleh :
CAHYO SETYO NUGROHO 20140120124
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA YOGYAKARTA
v
dimanfaatkan secara optimal, dikarenakan pengaruh dari rotasi dan revolusi bumi.
Sistem penjejak matahari dua axis adalah suatu inovasi baru yang
dirancang khusus untuk optimalisasi pengoprasian panel surya sebagai
pembangkit energi listrik.
Perancangan perangkat keras yang terdiri dari solar cell sebagai alat
konversi dari cahaya matahari menjadi tenaga listrik, pengolahan data yang
dioperasikan dengan arduino Nano, sensor LDR, sensor tegangan, driver relay,
dan penampil LCD.
Dengan menggunakan sistem penjejak matahari ini dapat menambah
efektifitas sel surya, karena energi terbesar yang diterima oleh sel surya adalah
arah radiasi matahari yang tegak lurus dengan bidang sel surya.
vi
Solar energy is one of the alternative sources of energy that can be
harnessed as a source of renewable energy. This untapped energy resources
optimally, due to the influence of rotation and revolution of the Earth.
Two axis sun tracking system is a new innovation that is designed
specifically for the optimization of the use of solar panels as generating electrical
energy.
The design of the hardware consists of a solar cell as a means of
conversion of sunlight into electric power, data processing which is operated with
the arduino Nano, sensors, voltage sensors, LDR relay driver, and the LCD
Viewer.
By using a tracking system of the Sun it can add to the effectiveness of the
solar cell, because the energy of the largest received by the solar cells is the
direction of the solar radiation that is perpendicular to the plane of the solar
cells.
vii
Terus menggali ilmu yang baru,
maka engkau akan mengenali
dan mengembangkan kemampuan diri
Jangan lupa bersyukur
dengan apa yang telah kamu dapatkan hari ini,
dan jangan bosan berdoa untuk impianmu
Alhamdulillah
Terima kasih untuk semuanya
viii Bismillah
Puji syukur kita panjatkan kehadirat Allah Subhanahu wa Ta’ala yang telah melimpahkan banyak rahmat-Nya kepada kita semua. Sholawat serta salam kita
haturkan kepada junjungan kita Nabi Muhammad Sholallahu ‘Alaihi Wa Salam.
Alhamdulillah penulis dapat menyelesaikan laporan tugas akhir dengan judul
SISTEM PENJEJAK MATAHARI DUA AXIS PADA PEMBANGKIT LISTRIK TENAGA SURYA
Tugas akhir ini disusun untuk memenuhi salah satu syarat dalam
menyelesaikan studi di Jurusan Teknik Elektro, Fakultas Teknik, Universitas
Muhammadiyah Yogyakarta
Tanpa menghilangkan rasa hormat yang mendalam penulis mengucapkan
terima kasih yang sebesar-besarnya kepada pihak-pihak yang telah membantu
penulis menyelesaikan proyek akhir ini, terutama kepada:
1. Bapak Ir. Agus Jamal M.Eng selaku Ketua Jurusan Teknik Elektro
Universitas Muhammadiyah Yogyakarta. Terima kasih atas bimbingannya
dan memberikan banyak saran dengan penuh kesabaran.
2. Bapak Rahmat Adiprasetya, ST., M.Eng., selaku Dosen Pembimbing I tugas
akhir, atas arahan dan bimbingannya dengan penuh kesabaran kepada penulis
selama melakukan proses perencanaan, pembuatan, dan penyusunan laporan
ini.
3. Mas Rama Okta Wiyagi, S.T.,M.Eng., selaku Dosen Pembimbing II tugas
akhir, atas arahan dan bimbingannya dengan penuh kesabaran kepada penulis
selama melakukan proses perencanaan, pembuatan, dan penyusunan laporan
ix
5. Kakak-kakakku tercinta Ira, Anto, Agdha, dan Sulis yang selalu memberikan
dukungan moral serta keponakanku Lexa yang telah menghiburku dikala
waktu gundah,
6. seluruh staf pengajar di urusan Teknik Elektro Universitas Muhammadiyah
Yogyakarta. yang telah memberikan ilmu sebagai bekal penulis menghadapi
tantangan di masa depan,
7. seluruh staf di urusan Teknik Elektro Universitas Muhammadiyah
Yogyakarta. yang telah membantu dalam pemanfaatan segala fasilitas
kampus,
8. Mbak Elok, Mas Rudi, Mas Uki, Mas Fajar dan teman ekstensi angkatan
2014 lainnya yang tidak bisa disebutkan semuanya yang telah memberikan
bantuan dan semangat untuk segera menyelesaikan proyek akhir,
9. Mas Sugeng, Haru, Arib dan teman-teman Lab Elektronika Dasar lainnya
yang telah membantu dan memberikan semangat untuk segera menyelesaikan
proyek akhir ini,
10. teman-teman kos Sendowo F119 dan jamaah Mushola Al-Ikhlas Sendowo,
11. untuk sahabat-sahabatku yang di perantauan lain, yang telah memberikan
semangat dan doa,
12. semua pihak yang telah membantu mendukung dalam penyusunan dan
pembuatan Proyek Akhir ini yang tidak dapat penulis sebutkan satu persatu.
Penulis berharap semoga laporan Proyek Akhir ini dapat bermanfaat bagi kita
semua, amiin
Yogyakarta, 23 Juli 2016
x
LEMBAR PENGESAHAN II ... iii
HALAMAN PERNYATAAN ... iv
INTISARI ... v
ABSTRACT ... vi
MOTTO DAN PERSEMBAHAN ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... xx
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xivi
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan ... 2
1.3. Manfaat ... 3
1.4. Batasan Masalah ... 3
1.5. Luaran Yang Diharapkan ... 3
1.6. Metodelogi ... 3
xi
2.3. Gerak Semu Tahunan Matahari ... 8
2.4. Sel Surya ... 9
2.5. Aktuator ... 11
2.6. Baterai ... 15
2.7. Arduino ... 15
2.8. Relay ... 19
2.9. LDR (Light Dependent Resistor) ... 20
2.10. Modul sensor tegangan ... 21
2.11. Modul catu daya LM2596... 22
BAB III METODE PENELITIAN 3.1. Diagram alur penelitian ... 23
3.1.1. Penjelasan blok diagram ... 24
3.2. Perancangan Sistem ... 25
3.3. Perancangan Perangkat Keras (Hardware)... 27
3.3.1. Perancangan sensor matahari ... 27
3.3.2. Rangkaian driver relay battery ... 28
3.3.3. Rangkaian driver relay aktuator ... 28
xii
4.1.2. Pengujian Aktuator... 33
4.1.3. Pengujian Driver Relay ... 37
4.1.4. Pengujian Arduino Nano dan LCD ... 38
4.1.5. Pengujian Resistor LDR ... 39
4.1.6. Pengujian Sensor Tegangan ... 40
4.1.7. Pengujian sistem secara keseluruhan ... 42
4.2. Pembahasan ... 48
4.2.1. Pengukuran konsumsi daya sistem penjejak matahari ... 48
4.2.2. Peningkatan energi ... 49
BAB V PENUTUP 5.1. Kesimpulan ... 51
5.2. Saran ... 52
DAFTAR PUSTAKA ... 53
xiii
Gambar 2.1. Gerak semu tahunan matahari ... 9
Gambar 2.2. Panel surya (Sel Surya) ... 10
Gambar 2.3. Aktuator linier ... 14
Gambar 2.4. Konfigurasi pin Arduino Nano ... 18
Gambar 2.5. Relay elektro mekanik ... 20
Gambar 2.6. Simbol dan bentuk LDR ... 21
Gambar 2.7. Modul regulator LM2596 ... 22
Gambar 3.1. Blok diagram alur penelitian ... 23
Gambar 3.2. Blok diagram sistem ... 26
Gambar 3.3. Rangkaian sensor LDR ... 27
Gambar 3.4. Rangkaian driver relay battery ... 28
Gambar 3.5. Rangkaian driver relay aktuator ... 29
Gambar 3.6. Flowchart program ... 30
Gambar 4.1. Grafik karakteristik antara tegangan dan kecepatan ... 35
Gambar 4.2. Grafik karakteristik antara tegangan dan kecepatan ... 36
Gambar 4.3. Hasil pengujian Arduino Nano dan LCD ... 39
Gambar 4.4. Hasil pengujian sensor tegangan ... 42
xiv
Tabel 4.1. Hasil pengujian Catu Daya LM2596S ... 33
Tabel 4.2. Hasil pengujian aktuator 1. ... 34
Tabel 4.3. Hasil Pengujian Driver Relay ... 37
Tabel 4.4. Hasil Pengujian sensor LDR ... 40
Tabel 4.5. Hasil pengujian sensor tegangan ... 41
Tabel 4.6. Hasil pengukuran daya sel surya tanpa penjejak ... 45
ABSTRACT
Solar energy is one of the alternative sources of energy that can be
harnessed as a source of renewable energy. This untapped energy resources
optimally, due to the influence of rotation and revolution of the Earth.
Two axis sun tracking system is a new innovation that is designed
specifically for the optimization of the use of solar panels as generating electrical
energy.
The design of the hardware consists of a solar cell as a means of
conversion of sunlight into electric power, data processing which is operated with
the arduino Nano, sensors, voltage sensors, LDR relay driver, and the LCD
Viewer.
By using a tracking system of the Sun it can add to the effectiveness of the
solar cell, because the energy of the largest received by the solar cells is the
direction of the solar radiation that is perpendicular to the plane of the solar
cells.
1
1.1. LATAR BELAKANG
Pada awal abad 21, banyak negara yang sudah menyadari pentingnya
pemanfaatan sumber energi terbarukan sebagai pengganti minyak bumi, batu bara,
dan gas yang kesemuanya itu dapat menimbulkan dampak kerusakan di bumi.
Semakin berkurangnya sumber energi yang tidak terbarukan, maka biaya
penambangan semakin besar sehingga harga energi semakin tinggi. Selain itu
penggunaan sumber energi tidak terbarukan dapat menimbulkan pencemaran alam.
Pemanfaatan energi terbarukan menjadi pilihan karena minim akan
pencemaran udara. Mudah diimplementasikan pada masyarakat umum khususnya
di daerah yang belum teraliri listrik. Terdapat beberapa sumber energi terbarukan
yang bersih, aman, dan tidak berpolusi.
Energi matahari adalah salah satu sumber energi alternatif yang dapat
dimanfaatkan sebagai sumber energi terbarukan. Sumber energi ini belum
dimanfaatkan secara optimal, dikarenakan pengaruh dari rotasi dan revolusi bumi.
Rotasi bumi yaitu bumi bergerak pada porosnya yang dapat menyebabkan
terjadinya siang dan malam hari, sedangkan revolusi bumi adalah pergerakan
bumi mengelilingi matahari dalam satu tahun.
Revolusi bumi dapat menyebakan gerak semu tahunan matahari, yaitu
Kedudukan maksimal matahari dari garis katulistiwa adalah 23.5o Lintang Utara
dan 23.5oLintang selatan.
Optimalisasi pemanfaatan energi matahari ini menjadi pemikiran bagi
Arindra Pamungkas pada tahun 2014. Dia membuat sebuah penjejak matahari
yang dapat mengikuti pergerakan matahari dari timur ke barat. Dia menggunakan
sensor fotodioda untuk sensor penjejak matahari dan menggunakan
mikrokontroller atmega 16 sebagai pengendalinya.
Di tahun 2015, Heny juga pernah membuat sebuah penjejak matahari yang
bergerak dalam satu axis, yaitu bergerak mengikuti cahaya matahari dari timur ke
barat. Dia menggunakan sensor LDR sebagai sensor pendeteksi arah datangnya
cahaya matahari dan menggunakan Arduino UNO sebagai pengendalinya.
Penjejak matahari rancangan Arindra dan Heni pada dasarnya mempunyai
prinsip kerja yang sama. Penjejak matahari mereka menggunakan sistem satu axis
yang dapat mengikuti pergerakan matahari dari timur sampai barat.
Untuk dapat meningkatkan efisiensi penjejak matahari, sistem dua axis dapat
diaplikasikan sebagai penjejak matahari. Sistem ini memungkinkan penjejak
matahari dapat mengontrol posisi yang sesuai dengan pergerakan rotasi dan
revolusi bumi.
1.2. TUJUAN
1.2.1. Mampu merancang alat pengatur posisi panel surya sesuai arah
datangnya cahaya matahari dengan dua axis, yaitu axis timur-barat dan
utara-selatan.
1.3. MANFAAT
Hasil dari tugas akhir ini dapat digunakan untuk menghasilkan energi
sebanyak mungkin dengan adanya sistem kontrol yang presisi untuk
mengendalikan pergerakan sel surya sesuai dengan arah datangnya cahaya
matahari sehinga dapat mengoptimalkan penyerapan cahaya matahari secara
langsung.
1.4. BATASAN MASALAH
Tugas akhir ini hanya terbatas pada hal-hal sebagai berikut:
1.4.1. Sel surya berfungsi sebagai pengkonveersi energi matahari ke energi
listrik.
1.4.2. Battery sebagai tempat penyimpanan energi listrik.
1.4.3. Rangkaian kontrol dan pengolah data menggunakan Arduino Nano.
1.4.4. Perbandingan daya pada sel surya dengan penjejak dan tanpa penjejak.
1.5. LUARAN YANG DIHARAPKAN
Dapat digunakan sebagai pengganti sumber energi minyak bumi yang optimal,
bersih, aman, dan bebas polusi.
1.6. METODOLOGI
1.6.1. Studi Pustaka
Metode ini dilaksanakan untuk mendapatkan dasar teori dan data sebagai
acuan.
1.6.2. Kerja di Laboratorium
Metode ini digunakan untuk merealisasikan rangkaian dan data hasil
1.6.3. Penggunaan Software
Pada tugas akhir ini digunakan software Eagle untuk menggambar
rangkaian dari kertas kedalam PCB dan software Arduino sebagai program
pengendali.
1.6.4. Konsultasi
Konsultasi dilakukan guna memperoleh informasi tentang materi yang
dibahas dengan Dosen Pembimbing Tugas Akhir.
1.7. SISTEMATIKA PENULISAN
Pada penulisan laporan ini, penulis membuat sistematika penulisan agar
memudahkan dalam membaca dan memahami isi dari laporan secara garis
besarnya. Secara global sistematika penulisan ini dibagi menjadi empat bagian:
BAB I PENDAHULUAN
Pada bab ini menjelaskan latar belakang penulisan sebagai topik, identifikasi
masalah yang timbul, pembatasan masalah yang timbul, dan pembatasan masalah
sebagai ruang lingkup yang hanya akan di bahas dalam penulisan.
BAB II DASAR TEORI
Pada bab ini menjelaskan tentang teori-teori yang yang mendukung dalam
perencanaan dan pembuatan alat.
BAB III METODE PENELITIAN
Membahas tentang metode penelitian, perancangan, pembuatan perangkat
keras yang meliputi rangkaian-rangkaian dan listing program yang akan
BAB IV PENGUJIAN DAN PEMBAHASAN
Bab ini berisi tentang hasil pengujian dan analisa yang mendukung untuk
keterangan mengenai pelaksanaan pembuatan tugas akhir.
BAB V PENUTUP
6
2.1. Sumber Energi
Energi adalah segela sesuatu yang membuat terjadi di sekeliling kita, energi
ada disemua benda, mobil, tanaman, angin, dan lain-lain.
Ada dua sember utama energi, yaitu:
1. Energi konvensional adalah energi yang sudah berasal dari bumi dalam
jumlah terbatas dan tidak dapat diregenerasi. Sumber energi ini akan
berakhir cepat atau lambat dan berbahaya bagi lingkungan.
2. Energi terbarukan adalah energi yang berasal dari sumber alami, seperti air,
matahari, dan angin. Sumber energi ini akan terus ada dan tidak berbahaya
bagi lingkungan.
Sumber energi konvensional dan terbarukan dapat dikonversikan menjadi
sumber energi sekunder, seperti listrik. Listrik berbeda dari sumber-sumber energi
lainnya dan dinamakan sumber energi sekunder atau pembawa energi karena
dimanfaatkan untuk menyimpan, memindahkan atau mendistribusikan energi
dengan nyaman. Sumber energi primer diperlukan untuk menghasilkan energi
listrik.
Ada beberapa jenis energi terbarukan yang dapat diterapkan di
daerah-daerah tertentu sesuai dengan letak geografisnya. Tenaga Surya, Tenaga Angin,
Biomassa dan Tenaga Air adalah teknologi yang paling sesuai untuk menyediakan
termasuk Panas Bumi dan Energi Pasang Surut adalah teknologi yang tidak bisa
dilakukan di semua tempat. Indonesia memiliki sumber panas bumi yang
melimpah; yakni sekitar 40% dari sumber total dunia. Akan tetapi sumber-sumber
ini berada di tempat-tempat yang spesifik dan tidak tersebar luas. Teknologi
energi terbarukan lainnya adalah tenaga ombak, yang masih dalam tahap
pengembangan.
(Contaned Energy Indonesia)
2.2. Energi Matahari
Energi surya atau matahari telah dimanfaatkan di banyak belahan dunia dan
jika dieksplotasi dengan tepat, energi ini berpotensi mampu menyediakan
kebutuhan konsumsi energi dunia saat ini dalam waktu yang lebih lama. Matahari
dapat digunakan secara langsung untuk memproduksi listrik atau untuk
memanaskan. Ada banyak cara untuk memanfaatkan energi matahari. Tumbuhan
mengubah sinar matahari menjadi energi kimia dengan cara fotosintesis. Kita
memanfaatkan energi ini dengan cara mengubah energi matahari menjadi energi
panas atau energi listrik. Dua tipe dasar energi matahari adalah “sinar matahari”
dan “photovoltaic” (photo: cahaya, voltaic: tegangan). Photovoltaic tenaga
matahari melibatkan pembangkit listrik dari cahaya. Prosesnya adalah penggunaan
bahan semi konduktor yang dapat disesuaikan untuk melepas elektron, pertikel
bermuatan negatif yang membentuk dasar listrik.
Bahan semi konduktor yang paling umum dipakai dalam sel photovoltaic
adalah silikon, sebuah elemen yang umum ditemukan di pasir. Semua sel
positif dan satu bermuatan negatif. Ketika cahaya matahari bersinar pada semi
konduktor, aliran listrik mengalir diantara sambungan dua lapisan yang
menyebabkan listrik mengalir sehingga membangkitkan arus DC. Makin kuat
cahaya, makin kuat aliran listrik.
(http://www.greenpeace.org/seasia/id/campaigns/perubahan-iklim-global/Energi-Bersih/Energi_matahari/)
2.3. Gerak Semu Tahunan Matahari
Gerak Semu Tahunan Matahari adalah gerakan semu matahari dari
khatulistiwa menuju garis lintang balik utara 23½o LU, kembali ke khatulistiwa
dan bergeser menuju ke garis lintang balik selatan 23½o LS dan kembali lagi ke
khatulistiwa. Hal tersebut berpengaruh pada letak tempat terbit dan terbenamnya
matahari yang setiap hari tidaklah sama . Setiap hari akan terjadi pergeseran dari
letak terbit/terbenamnya dibandingkan dengan letak yang kemarin.
Gerak semu matahari tahunan ini disebabkan karena proses perputaran bumi
mengelilingi matahari (revolusi), sehingga dapat dikatakan bahwa yang berubah
adalah posisi bumi terhadap matahari. Akibat dari perputaran bumi yang
mengelilingi matahari tersebut, maka mengakibatkan terjadinya pergeseran semu
letak terbit/terbenamnya matahari. Berikut ini bagan yang menunjukkan
Gambar 2.1.Gerak semu tahunan matahari
(sumber gambar: http://dinamikasains.blogspot.co.id)
Bumi bergerak mengelilingi matahari disebut revolusi. Pada saat berevolusi,
Bumi juga berputar pada porosnya. Kondisi ini mengakibatkan matahari seolah
bergerak bolak-balik di sekitar garis balik balik utara (23½o LU) dan garis balik
selatan (23½oLS).
(http://www.gurupendidikan.net/2016/03/pengertian-penyebab-dan-pengaruh-gerak-semu-tahunan-matahari.html)
2.4. Sel Surya
Konsep panas dan suhu harus dipahami sebelum sistem energi surya
dipahami. Seringkali kedua istilah ini disalah pahami dan bahkan lebih buruk,
digunakan secara terus menerus. Panas dan suhu memiliki perbedaan penting.
Pertama, suhu dapat diukur secara langsung dengan Termometer, tapi panas
biasanya harus diukur secara tidak langsung. Sesuatu yang panas dapat diukur
hanya tergantung pada suhu tetapi juga pada faktor-faktor lain seperti terbuat dari
apa dan ada berapa banyak.
Gambar 2.2.Panel surya (Sel Surya) (Sumber gambar: www.ecnmag.com)
Sebuah sistem energi surya aktif terdiri dari beberapa komponen yang saling
berhubungan dan fungsi utamanya adalah untuk mengkonversi terjadinya radiasi
matahari menjadi bentuk yang kompatibel dengan beban energi. Dalam cahaya
matahari terkandung energi dalam bentuk foton. Ketika foton ini mengenai
permukaan sel surya, elektron-elektronnya akan tereksitasi dan menimbulkan
aliran listrik. Prinsip ini dikenal sebagai prinsip photoelectric. Sel surya dapat
tereksitasi karena terbuat dari material semikonduktor yang mengandung unsur
silikon. Silikon ini terdiri atas dua jenis lapisan sensitif: lapisan negatif (tipe-n)
dan lapisan positif (tipe-p). Sel surya terbuat dari bahan yang mudah pecah dan
berkarat jika terkena air. Karena itu sel ini dibuat dalam bentuk panel-panel
dikenal sebagai panel surya. Daya yang dihasilkan oleh panel surya maksimum
diukur dengan besaran Wattpeak (Wp), yang konversinya terhadap Watthour (Wh)
tergantung intensitas cahaya matahari yang mengenai permukaan panel.
Selanjutnya daya yang dikeluarkan oleh panel surya adalah daya panel dikalikan
lama penyinaran.
2.5. Aktuator
Aktuator adalah sebuah peralatan mekanis untuk menggerakkan atau
mengontrol sebuah mekanisme atau sistem. Aktuator adalah bagian keluaran
untuk mengubah energi suplai menjadi energi kerja yang dimanfaatkan. Sinyal
keluaran dikontrol oleh sistem kontrol dan aktuator bertanggung jawab pada
sinyal kontrol melalui elemen kontrol terakhir.
Aktuator diaktifkan dengan menggunakan lengan mekanis yang biasanya
digerakkan oleh motor listrik, yang dikendalikan oleh media pengontrol otomatis.
2.5.1. Fungsi Aktuator
Aktuator memiliki fungsi sebagai berikut:
1. Penghasil gerakan
2. Gerakan rotasi dan translasi
3. Mayoritas aktuator sebagai motor based
4. Aktuator dalam simulasi cenderung dibuat linier
5. Aktuator riil cenderung non-linier
2.5.2. Tenaga Penggerak Aktuator
1. Aktuator tenaga elektris, biasanya digunakan solenoid, motor arus
searah (Mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang
2. Aktuator tenaga hidrolik, torsi yang besar konstruksinya sukar.
3. Aktuator tenaga pneumatik, sukar dikendalikan.
4. Aktuator lainnya: piezoelectric, magnetic, ultra sound.
2.5.3. Macam-macam actuator
1. Aktuator mekanik
Salah satu contoh aktuator mekanik adalah motor DC. Motor DC
mengubah energilistrik berupa sinyal tegangan menjadi energi mekanik
berupa putaran yang kontinyu.
2. Aktuator listrik/ elektrik
Merupakan alat yang digunakan untuk merubah sinyal listrk menjadi
gerakan mekanik. Tipe aktuator listrik adalah sebagai berikut:
1) Selenoid
2) Motor stepper
3) Brushless DC-motors.
4) Motor Induksi.
5) Motor Sinkron.
3. Aktuator Hidrolik
Aktuator hidrolik merupakan silinder hidrolik maupun motor hidrolik,
dimana silinder hidrolik bergerak secara translasi sedangkan motor hidrolik
bergerak secara roatasi. Prinsip kerja aktuator hidrolik milupti prinsip
4. Aktuator pneumatic
Aktuator pneumatik prinsip kerjanya menggunakan perbedaan tekanan.
Aktuator pneumatik sering digunakan untuk mentranslasikan sinyal kontrol
menjadi suatu gaya atau torsi yang besar untuk memanipulasi elemen
kontrol.
Aktuator pneumatik dapat digolongkan menjadi 2 kelompok:
1) Gerakan lurus (gerakan linear):
Prinsip kerja aktuator linier adalah bahwa ada sebuah motor yang
berputar sekrup drive yang menggunakan timing belt drive sinkron.
Beberapa aktuator linier juga dapat menggunakan drive atau drive worm
gear langsung. Yang pernah pilihan, berputar sekrup mendorong kacang
berkendara sepanjang sekrup, yang pada gilirannya mendorong keluar
batang dan memutar sekrup di arah yang berlawanan akan menarik
kembali batang. Menurut Asosiasi Ilmu, sekrup drive baik thread ACME
atau bola atau belt-driven yang adalah apa yang memberikan mesin
gerakannya. Sebuah tabung penutup melindungi mur sekrup dari
unsur-unsur lingkungan dan kontaminasi sehingga memungkinkan untuk
menggunakan mesin terus menerus tanpa kesempatan itu bangun
dilekatkan. Dorong bantalan radial izin sekrup untuk memutar secara
bebas dalam kondisi dimuat dan aktuator linier memberikan kekuatan.
Ada berbagai bentuk energi yang dijalankan aktuator. Bentuk-bentuk
energi meliputi, hidrolik, pneumatik, mekanik dan listrik. Aktuator linier
Gambar 2.3.Aktuator linier
(Sumber gambar : http://icon-blogger.blogspot.co.id/)
2) Gerakan putar
Aktuator putar atau Rotary Motion Actuator merupakan motor
pneumatik mengubah energi pneumatik menjadi gerakan putar mekanik
secara kontinyu. Motor pneumatik dengan sudut putar tanpa batas telah
menjadi salah satu elemen kerja yang paling banyak dipakai.
1. Kelebihan Aktuator Pneumatik
2. Kecepatan putaran dan tenaga dapat diatur secara tak terbatas
3. Batas kecepatan cukup lebar
4. Ukuran kecil sehingga ringan
5. Memiliki pengaman beban lebih
6. Tidak peka terhadap debu, cairan, panas, dan dingin
7. Tahan terhadap ledakan
8. Mudah dalam pemeliharaan
2.6. Baterai
Baterai ialah kombinasi dua atau lebih sel elektrokimia yang bisa
menyimpan energi dan kemudian merubahnya menjadi energi listrik. Baterai
sekali pakai disebut dengan baterai primer, sedangkan baterai isi ulang disebut
dengan baterai sekunder. Baterai terdiri dari satu atau lebih voltaic cell
(tergantung besarnya voltase yang diinginkan contohnya baterai aki 6 Volt atau 12
Volt). Masing-masing voltaic cell terdiri dari dua half cells yang dihubungkan
secara seri oleh penghantar elektrolit. Satu half cells mempunyai elektroda positif
(katoda) yang satunya elektroda negatif (atoda). Daya baterai di dapat dari reaksi
reduksi dan oksidasi. Reduksi terjadi pada di katoda dan oksidasi terjadi di katoda.
Elektroda tersebut tidak bersentuhan dan arus listrik dihubungkan dengan
elektrolit. Elektrolit dapat berupa cairan atau padat.
Aki terdiri dari sel-sel dimana tiap sel memiliki tegangan sebesar 2 V,
artinya aki mobil dan aki motor yang memiliki tegangan 12 V terdiri dari 6 sel
yang dipasang secara seri (12 V = 6 x 2 V) sedangkan aki yang memiliki tegangan
6 V memiliki 3 sel yang dipasang secara seri (6 V = 3 x 2 V). Antara satu sel
dengan sel lainnya dipisahkan oleh dinding penyekat yang terdapat dalam bak
baterai, artinya tiap ruang pada sel tidak berhubungan karena itu cairan elektrolit
pada tiap sel juga tidak berhubungan (dinding pemisah antar sel tidak boleh ada
yang bocor/merembes).
2.7. Arduino
Arduino adalah pengendali mikro singleboard yang bersifat opensource,
perangkat elektronik dalam berbagai bidang. Hardware-nya memiliki prosesor
Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri. Arduino
juga merupakan platform hardware terbuka yang ditujukan kepada siapa saja
yang ingin membuat peralatan elektronik interaktif berdasarkan hardware dan
software yang fleksibel dan mudah digunakan. Mikrokontroler diprogram
menggunakan bahasa pemrograman arduino yang memiliki kemiripan syntax
dengan bahasa pemrograman C. Karena sifatnya yang terbuka maka siapa saja
dapat mengunduh skema hardware arduino dan membuatnya. Arduino
menggunakan keluarga mikrokontroler ATMega yang dirilis oleh Atmel sebagai
basis, namun ada individu/perusahaan yang membuat clone arduino dengan
menggunakan mikrokontroler lain dan tetap kompatibel dengan arduino pada level
hardware. Untuk fleksibilitas, program dimasukkan melalui bootloader meskipun
ada opsi untuk membypass bootloader dan menggunakan downloader untuk
memprogram mikrokontroler secara langsung melalui port ISP.
2.7.1. Jenis-Jenis arduino:
1. Arduino UNO
Jenis arduino ini adalah yang paling banyak digunakan. Terutama untuk
pemula sangat disarankan untuk menggunakan Arduino Uno. Dan banyak
sekali referensi yang membahas Arduino Uno. Versi yang terakhir adalah
Arduino Uno R3 (Revisi 3), menggunakan ATMEGA328 sebagai
Microcontrollernya, memiliki 14 pin I/O digital dan 6 pin input analog. Untuk
pemograman cukup menggunakan koneksi USB type A to To type B. Sama
2. Arduino Due
Berbeda dengan saudaranya, Arduino Due tidak menggunakan ATMEGA,
melainkan dengan chip yang lebih tinggi ARM Cortex CPU. Memiliki 54 I/O
pin digital dan 12 pin input analog. Untuk pemogramannya menggunakan
Micro USB, terdapat pada beberapa handphone.
3. Arduino Mega
Mirip dengan Arduino Uno, sama-sama menggunakan USB type A to B
untuk pemogramannya. Tetapi Arduino Mega, menggunakan Chip yang lebih
tinggi ATMEGA2560. Dan tentu saja untuk Pin I/O Digital dan pin input
analognya lebih banyak dari Uno.
4. Arduino Leonardo
Bisa dibilang Leonardo adalah saudara kembar dari Uno. Dari mulai
jumlah pin I/O digital dan pin input Analognya sama. Hanya pada Leonardo
menggunakan Micro USB untuk pemogramannya.
5. Arduino Fio
Bentuknya lebih unik, terutama untuk socketnya. Walau jumlah pin I/O
digital dan input analognya sama dengan uno dan leonardo, tapi Fio memiliki
Socket XBee. XBee membuat Fio dapat dipakai untuk keperluan projek yang
berhubungan dengan wireless.
6. Arduino Lilypad
Bentuknya yang melingkar membuat Lilypad dapat dipakai untuk
lamanya menggunakan ATMEGA168, tapi masih cukup untuk membuat satu
projek keren. Dengan 14 pin I/O digital, dan 6 pin input analognya.
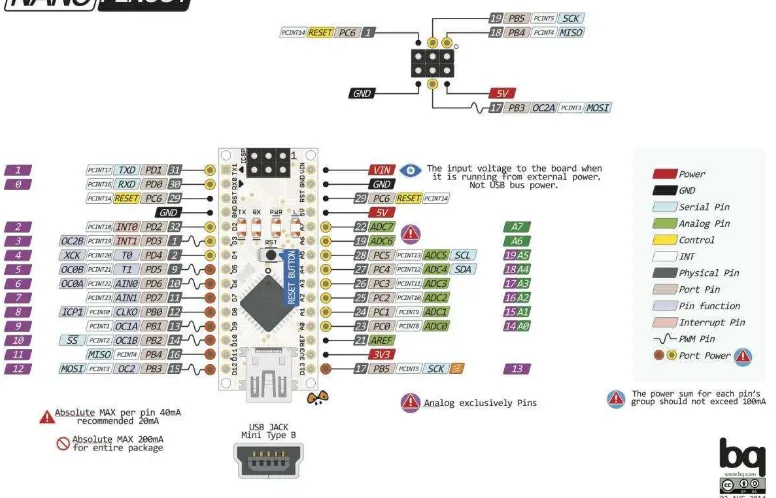
7. Arduino Nano
Sepertinya namanya, Nano yang berukulan kecil dan sangat sederhana ini,
menyimpan banyak fasilitas. Sudah dilengkapi dengan FTDI untuk
pemograman lewat Micro USB. 14 Pin I/O Digital, dan 8 Pin input Analog
(lebih banyak dari Uno). Dan ada yang menggunakan ATMEGA168, atau
ATMEGA328.
Gambar 2.4.Konfigurasi pin Arduino Nano (sumber gambar : www.bq.com )
8. Arduino Mini
Fasilitasnya sama dengan yang dimiliki Nano. Hanya tidak dilengkapi
dengan Micro USB untuk pemograman. Dan ukurannya hanya 30 mm x 18
9. Arduino Micro
Ukurannya lebih panjang dari Nano dan Mini. Karena memang
fasilitasnya lebih banyak yaitu; memiliki 20 pin I/O digital dan 12 pin input
analog.
10. Arduino Ethernet
Ini arduino yang sudah dilengkapi dengan fasilitas ethernet. Membuat
Arduino kamu dapat berhubungan melalui jaringan LAN pada komputer.
Untuk fasilitas pada Pin I/O Digital dan Input Analognya sama dengan Uno.
11. Arduino Esplora
Rekomendasi bagi kamu yang mau membuat gadget sepeti Smartphone,
karena sudah dilengkapi dengan Joystick, button, dan sebagainya. Kamu hanya
perlu tambahkan LCD, untuk lebih mempercantik Esplora.
12. Arduino Robot
Ini adalah paket komplit dari Arduino yang sudah berbentuk robot. Sudah
dilengkapi dengan LCD, Speaker, Roda, Sensor Infrared, dan semua yang
kamu butuhkan untuk robot sudah ada pada Arduino ini.
2.8. Relay
Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara
elektronik (elektro magnetik). Saklar pada relay akan terjadi perubahan posisi
OFF ke ON pada saat diberikan energi elektro magnetik pada armatur relay
tersebut.Relaypada dasarnya terdiri dari 2 bagian utama yaitu saklar mekanik dan
sistem pembangkit elektromagnetik (induktor inti besi). saklar atau kontaktor
pembangkit magnet untuk menarik armatur tuas saklar atau kontaktorrelay.Relay
yang ada dipasaran terdapat berbagai bentuk dan ukuran dengan tegangan kerja
dan jumlah saklar yang berfariasi, berikut adalah salah satu bentukrelayyang ada
dipasaran.
Gambar 2.5.Relayelektro mekanik
(Sumber gambar: http://www.jayconsystems.com)
2.9. LDR (Light Dependent Resistor)
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor
yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya
yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang
dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata
lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus
listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan
menghambat arus listrik dalam kondisi gelap.
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang
diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm
(kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi
Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika
sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti
Maling, Shutter Kamera, Alarm dan lain sebagainya.
(http://teknikelektronika.com/pengertian-ldr-light-dependent-resistor-cara-mengukur-ldr/)
Gambar 2.6.Simbol dan bentuk LDR (sumber gambar : teknikelektronika.com)
2.10. Modul sensor tegangan
Modul sensor tegangan adalah suatu sensor yang digunakan untuk
mngukur tegangan DC dari 0 volt sampai maksimal 25 volt. Nilai output dari
sensor ini adalah analog, yang nantinya akan diproses dengan menggunakan pin
adc arduino. Modul ini bekerja berdasarkan prinsip resistive divider, membuat
tegangan yang akan dideteksi berkurang 5x lipat. Tegangan input analog pada
Arduino 0-5v, sehingga tegangan maximum yang dapat dideteksi oleh sensor
adalah 5x 5v = 25v. Jika menggunakan sistem tegangan input 3.3v, maka
2.11. Modul catu daya LM2596
Modul regulator LM2596 adalah suatu regulator yang berfungsi untuk
menurunkan tegangan (step down). Regulator ini mampu mengeluarkan arus
maksimal 3 A, dengan daya input 3.5 V sampai 40 V, dan daya output 1.2 V
sampai 37 V. Range tegangan input minimal 1.5 volt lebih besar dari tegangan
input.
Dalam rangkaian ini, catu daya menggunakan modul regulator LM2596S,
regulator tersebut digunakan untuk menurunkan tegangan dari battery aki atau
dari sel surya menjadi tegangan 12 volt yang dapat digunakan sebagai input
arduino.
23
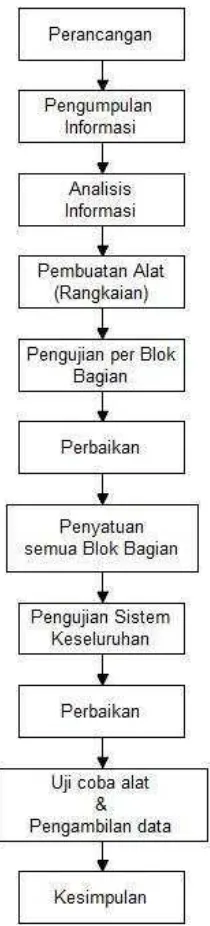
3.1. Diagram alur penelitian
Diagram blok alur penelitian dapat dilihat pada gambar 3.1.
3.1.1. Penjelasan blok diagram
1.Perancangan
Penelitian ini dimulai dari perancangan awal mengenai bentuk, sistem
rangkaian dan sistem mekanik dari alat ini.
2.Pengumpulan informasi
Pada tahap ini dilakukan pengumpulan data-data informasi dari buku
maupun dari sumber internet yang terpecaya mengenai bahan dan komponen
yang akan digunakan.
3.Analisis informasi
Setelah dilakukan proses pengumpulan informasi, maka proses selanjutnya
adalah analisis informasi untuk menentukan bentuk, bahan dan komponen yang
akan digunakan.
4.Perancangan dan pembuatan alat (rangkaian)
Pada tahap ini dilakukan perancangan sistem elektris dan pembuatan sistem
mekanik, seperti perangkaian komponen-komponen pada papan PCB dan
sistem penggerak yang akan digunakan pada alat ini.
5.Pengujian per blok bagian
Pengujian ini dilakukan dengan tujuan untuk mengetahui kualitas tiap blok
bagian, agar tidak terjadi kerusakan saat semua bagian disatukan.
6.Perbaikan
Perbaikan dilakukan apabila hasil dari pengujian per blok bagian tidak
sesuai dengan apa yang diharapkan atau kinerja tidak maksimal.
Tahap ini dilakukan penyatuan semua blok bagian yang telah teruji menjadi
satu kesatuan yang sesuai dengan perancangan sebelumnya.
8.Pengujian sistem keseluruhan
Pengujian sistem keseluruhan adalah pengujian setelah semua bagian
disatukan, bertujuan untuk mengetahui kinerja alat secara keseluruhan.
9.Perbaikan
Perbaikan dilakukan apabila hasil dari pengujian sistem keseluruhan tidak
sesuai dengan apa yang diharapkan atau kinerja belum maksimal.
10. Uji coba alat dan pengambilan data
Setelah dilakukan pengujian dan perbaikan secara keseluruhan, maka
proses uji coba alat dilakukan apakah alat mampu bekerja sesuai yang
diharapkan atau tidak. Pada tahap ini sekaligus dilakukan proses pengambilan
data yang diperlukan untuk laporan.
11. Kesimpulan
Kesimpulan berisi hasil akhir dari penelitian dan evaluasi terhadap
penelitian.
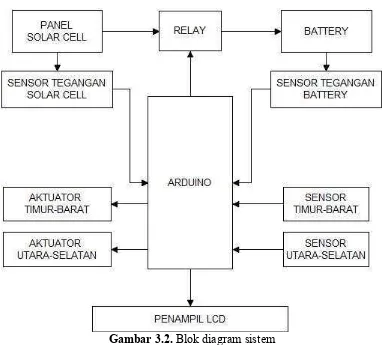
3.2. Perancangan sistem
Pengertian perancangan sistem adalah penggabungan beberapa rangkaian
yang sudah ada atau membuat rangkaian menjadi satu sistem utuh yang
difungsikan sebagai suatu yang dapat bekerja sesuai fungsinya. Untuk mengetahui
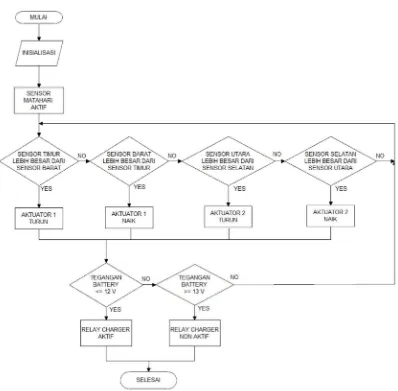
Gambar 3.2.Blok diagram sistem
Cara kerja dari diagram diatas adalah sel surya menerima cahaya matahari
sehingga akan mengeluarkan tegangan. Tegangan dari sel surya dibaca oleh
sensor tegangan sel surya. Sensor tersebut akan mengirim data ke arduino yang
selanjutnya diolah untuk mengirim hasil data ke layar lcd. Untuk pengisisan
baterai, tegangan pada baterai akan dibaca oleh sensor tegangan baterai, bila
tegangan baterai dibawah 12 volt maka relay akan aktif dan baterai akan
melakukan pengisian ulang. Bila tegangan baterai sudah diatas 13 volt, maka relay
akan non aktif dan pengisisan ulang akan berhenti. Hal ini bertujuan untuk
menghemat umur baterai dengan cara pengisian ulang baterai tidak dilakukan
Pada bagian pergerakan panel surya, panel surya digerakan oleh dua
aktuator yaitu aktuator 1 untuk pergerakan utara - selatan dan aktuator 2 untuk
pergerakan timur – barat. Setiap aktuator dikendalikan oleh dua sensor, yaitu
sensor timur – barat untuk aktuator 2 dan sensor utara – selatan untuk aktuator 1.
3.3. Perancangan Perangkat Keras (Hardware)
Perancangan perangkat keras atau hardwere meliputi dari perancangan
secara elektris dan secara mekanik. Perancangan elektris meliputi dari
perancangan system sensor matahari dan perancangan driver relay.
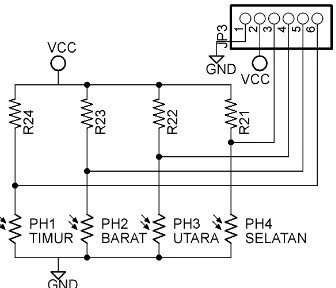
3.2.1.Perancangan sensor matahari
Sensor matahari yang digunakan adalah sensor LDR (Light Dependent
Resistor). Sensor LDR berfungsi untuk mendeteksi intensitas cahaya matahari
dan pada alat ini difungsikan untuk mendeteksi arah matahari dengan cara
membandingkan intensitas cahaya matahari dengan dua sensor LDR. Sensor
LDR yang digunakan berjumlah 4 buah sensor, yaitu sensor untuk arah timur,
barat, utara, dan selatan. Rangkaian skematik sensor sel surya seperti dibawah
ini.
Gambar 3.2. adalah rangkaian LDR dengan sistem pembagi tegangan,
resistor LDR di rangkai seri dengan resistor 47 k.
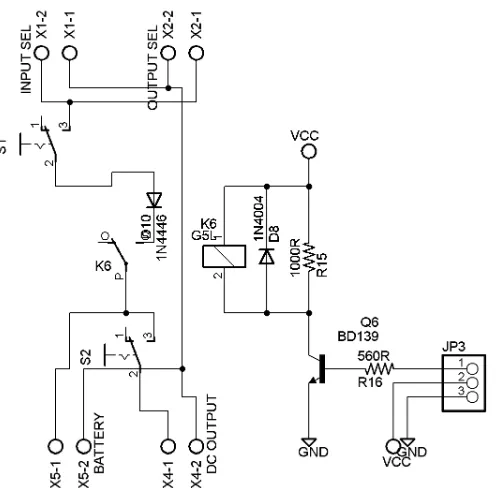
3.2.2.Rangkaian driver relaybattery
Rangkaian driver ini digunakan sebagai saklar untuk pengisian battery,
apabila tegangan battery dibawah 12 volt maka relay akan aktif dan battery
melakukan pengisisan, relay akan non aktif jika tegangan battery sudah diatas
13 volt.
Gambar 3.4.Rangkaiandriver relay battery
Rangkaian driver relay menggunakan prinsip kerja transistor sebagai saklar,
yang bekerja apabila transitor aktif maka relay akan teraliri tegangan dan akan
aktif. Transistor yang digunakan adalah jenis NPN BD139.
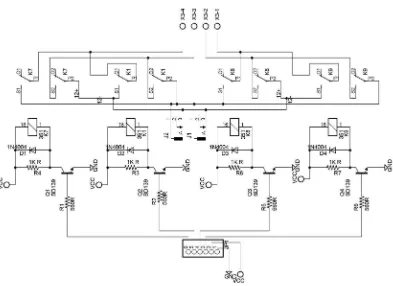
3.2.3.Rangkaian driver relay aktuator
Rangkaian driver ini digunakan untuk mengatur arah putar motor
Gambar 3.5.Rangkaiandriver relayaktuator
Relay yang 8 kaki berfungsi sebagai driver penggerak actuator 1 dan
actuator 2. Satu aktuator menggunakan 2 relay yang digunakan sebagai
pengubah arah polaritas tegangan input aktuator, sehingga aktuator dapat
bergerak secara bolak balik atau naik atau turun.
3.4. Perancangan perangkat lunak (software)
Pada pembuatan alat ini, adrduino diprogram dengan bahasa C Arduino.
Pada bahasa C Arduino untuk mempermudah pengaksesan komponen elektronik
telah disediakanlibraryyang dibagikan gratis pada situs resmi arduino. Flowchart
31
Tujuan pengujian ini adalah untuk membuktikan apakah sistem yang
diimplementasikan telah memenuhi spesifikasi yang telah direncanakan
sebelumnya. Hasil pengujian yang akan dimanfaatkan untuk menyempurnakan
kinerja sistem dan sekaligus digunakan dalam pengembangan lebih lanjut.
Berdasarkan spesifikasi sistem yang telah dijalankan sebelumnya, maka dilakukan
pengujian terhadap sistem menggunakan beberapa metode pengujian. Metode
pengujian dipilih berdasarkan fungsi operasional dan beberapa parameter yang
ingin diketahui dari sistem tersebut.
Dalam penelitian ini dipilih 2 macam metode pengujian, yaitu pengujian
fungsional dan pengujian kinerja sistem secara keseluruhan. Pengujian fungsional
digunakan untuk membuktikan apakah sistem yang diimplementasikan dapat
memenuhi persyaratan fungsi operasional yang direncanakan sebelumnya.
Sedangkan pengujian kinerja sistem secara keseluruhan bertujuan untuk
memperoleh beberapa parameter yang dapat menunjukkan kemampuan dan
kehandalan sistem dalam menjalankan fungsi operasionalnya. Dengan
ditemukan kelebihan dan kekurangan dari alat yang dibuat sehingga memudahkan
jika dilakukan pengembangan nantinya.
4.1. Pengujian Fungsional
Ada 2 macam metode pengujian fungsional yang dilakukan yaitu pengujian
fungsional bagian demi bagian dan pengujian sistem secara keseluruhan.
Pengujian fungsional bagian demi bagian dari sistem keseluruhan terdiri dari :
1. Pengujian modul regulator LM2596S (catu daya)
2. Pengujian aktuator 1 dan aktuator 2
3. Pengujiandriverrelay
4. Pengujian Arduino Nano dan Display LCD
5. Pengujian LDR (Light Dependent Resistor)
4.1.1. Pengujian Modul Regulator LM2596S (Catu Daya)
Rangkaian pertama yang harus diuji adalah rangkaian catu daya. Hal ini
dikarenakan rangkaian catu daya merupakan aspek yang paling penting dalam
menjalankan seluruh rangkaian sistem ini. Melalui catu daya ini, sistem akan
memperoleh input untuk mengaktifkan komponen-komponen dalam sistem.
Pengujian yang dilakukan adalah dengan mengambil data pengukuran tegangan
Pengujian catu daya ini sebelumnya regulator LM2596S diatur agar tegangan
output 12 Volt dan 10 Volt. Adapun hasil pengujian catu daya ditunjukkan pada
Tabel 4.1.
TEGANGAN INPUT TEGANGAN OUTPUT
10 Volt TEGANGAN OUTPUT12 Volt
8 Volt 6.75 Volt 6.75 Volt
9 Volt 7.75 Volt 7.71 Volt
10 Volt 8.75 Volt 8.88 Volt
11 Volt 9.81 Volt 9.78 Volt
12 Volt 9.96 Volt 10.84 Volt
13 Volt 9.98 Volt 11.86 Volt
14 Volt 9.99 Volt 11.96 Volt
15 Volt 10 Volt 11.98 Volt
Tabel 4.1.Hasil pengujian Catu Daya LM2596S
Dari hasil pengujian diatas, dapat disimpulkan bahwa tegangan input minimal
yang dibutuhkan untuk kinerja regultor yang baik adalah 1.5 - 2 Volt lebih besar
dari tegangan output.
4.1.2. Pengujian Aktuator
Pengujian aktuator ini dilakukan pada aktuator 1 dan aktuator 2, pengujian
dilakukan dengan memberi tegangan input pada masing-masing aktuator dari 5
volt sampai 15 volt, arus diukur dengan 2 metode yaitu arus saat tanpa beban dan
mengetahui kinerja dari aktuator tersebut.
Pengujian pertama dilakukan pada aktuator 1, adapun hasil pengujiannya
dapat ditunjukkan pada tabel 4.2.
NOTEGANGAN
(volt)
ARUS (A)
JARAK (m)
WAKTU (s)
KECEPATAN (m/s) TANPA
BEBAN
DENGAN BEBAN
1 5 0.45 0 0.085 0 0.00000
2 6 0.59 0 0.085 0 0.00000
3 7 0.34 0.9 0.085 105 0.00081
4 8 0.35 1.05 0.085 85 0.00100
5 9 0.35 0.7 0.085 71 0.00120
6 10 0.38 0.67 0.085 57 0.00149
7 11 0.39 0.65 0.085 48 0.00177
8 12 0.41 0.66 0.085 46 0.00185
9 13 0.43 0.61 0.085 38 0.00224
10 14 0.39 0.65 0.085 34 0.00250
11 15 0.38 0.66 0.085 32 0.00266
Tabel 4.2.Hasil pengujian aktuator 1.
Dari hasil tabel 4.2. Dapat dibuat grafik karakteristik antara tegangan dan
Gambar 4.1.Grafik karakteristik antara tegangan dan kecepatan
Dari hasil gambar grafik diatas, dapat disimpulkan bahwa semakin besar
tegangan input maka kecepatan gerak aktuator semakin tinggi.
Pengujian kedua dilakukan pada aktuator 2, adapun hasil pengujiannya dapat
ditunjukkan pada tabel 4.3.
NOTEGANGAN(volt)
ARUS (A)
JARAK (m)
WAKTU (s)
KECEPATAN (m/s) TANPA
BEBAN
DENGAN BEBAN
1 5 0.18 0.3 0.055 71 0.00077
2 6 0.2 0.35 0.055 55 0.00100
3 7 0.2 0.36 0.055 45 0.00122
4 8 0.2 0.37 0.055 36 0.00153
5 9 0.22 0.38 0.055 29 0.00190
6 10 0.23 0.38 0.055 27 0.00204
NOTEGANGAN(volt)
ARUS (A)
JARAK (m)
WAKTU (s)
KECEPATAN (m/s) TANPA
BEBAN
DENGAN BEBAN
8 12 0.25 0.41 0.055 21 0.00262
9 13 0.25 0.41 0.055 20 0.00275
10 14 0.26 0.41 0.055 18 0.00306
11 15 2.27 0.42 0.055 17 0.00324
Tabel 4.2.Hasil pengujian aktuator 2.
Dari hasil tabel 4.2. Dapat dibuat grafik karakteristik antara tegangan dan
kecepatan.
Gambar 4.2.Grafik karakteristik antara tegangan dan kecepatan
Dari hasil gambar grafik diatas, dapat disimpulkan bahwa semakin besar
tegangan input maka kecepatan gerak aktuator semakin tinggi.
bahwa kinera aktuator 2 lebih baik dari pada kinerja aktuator 1, karena dari hasil
tabel aktuator 2 lebih konstan dan stabil.
Dari sisi mekanis aktuator 2 mempunyai panjang maksimal 100 cm dan
aktuator 1 mempunyai panjang 111 cm. Sehingga aktuator 2 dapat digunakan
sebagai penggerak axis utara selatan yang membutuhkan pnajang lebih, dan
aktuator 1 penggerak axis timur barat.
4.1.3. PengujianDriverRelay
Pengujiandriverrelay dilakukan untuk mengetahui kinerja dari relay tersebut
apakah sesuai fungsinya yaitu sebagai saklar atau bukan. Pengujian driver relay
didasarkan pada prinsip kerja transistor BD139 sebagai saklar, transistor ini akan
aktif jika ada tegangan input pada V basis (Vb). Jika transistor aktif maka relay
akan aktif. Pada alat ini akan menggunakan 2 jenis relay, yaitu relay 5 kaki dan
relay 8 kaki. Berikut hasil pengujian driver relay dapat dilihat pada tabel 4.4.
JENIS KONDISI Vbe(volt)Vce(volt) V relay
RELAY 5 KAKI
ON 0.7 0 4.82
OFF 0 5 0
RELAY 8 KAKI
ON 0.7 0 4.9
OFF 0 5.4 0
Tabel 4.3.Hasil PengujianDriver Relay
bekerja dengan baik sebagaimana fungsinya, yaitu sebagai saklar.
4.1.4. Pengujian Arduino Nano dan LCD
Pengujian Arduino sangat penting untuk dilakukan, karena arduino adalah
sebagai komponen terpenting dalam alat ini. Pengujian ini dilakukan untuk
mengetahui kinerja dari sistem arduino nano. Pengujian dilakukan dengan
memberi data program yang dapat menampilkan di LCD. Berikut adalah contoh
program pengujian Arduino dan LCD:
#include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27,16, 2); void setup() {
lcd.setCursor(1,0); //Start at character 4 on line 0 lcd.print("CAHYO SETYO N.");
delay(1000);
lcd.setCursor(0,1);
lcd.print("20140120124 UMY"); delay(8000);
}
void loop() { }
Gambar 4.3.Hasil pengujian Arduino Nano dan LCD
Dari hasil pengujian diatas dapat diketahui bahwa Arduino Nano dan LCD
masih dapat berfungsi dengan baik
4.1.5. Pengujian Resistor LDR
Sensor LDR (Light Dependent Resistor) digunakan untuk sensor arah untuk
panel surya, sistemnya yaitu membandingkan sensor timur dan barat, dan sensor
utara dan selatan. Pengujian sensor LDR perlu dilakukan bertujuan untuk
mengetahi nilai hambatan masing-masing sensor. Nilai hambatan pada tiap LDR
berbeda jadi pengujian ini adalah mencari nilai hambatan resistor yang saling
berdekatan. Pengujian ini dilakukan didalam ruangan dan dengan intensitas
NO SENSOR
LDR
NILAI HAMBATAN
()
1 LDR 1 5412/94k
2 LDR 2 6632/94k
3 LDR 3 5943/60k
4 LDR 4 6478/107k
Tabel 4.4.Hasil Pengujian sensor LDR
Dari hasil pengujian sensor LDR diatas diketahui nilai dari masing masing
LDR hampir sama, untuk kinerja sensor arah yang maksimal maka dipilih 2
pasang sensor LDR yang nilainya saling mendekati. Yaitu untuk arah timur-barat
menggunakan LDR 1 dan LDR 3, sedangkan untuk arah utara selatan
menggunakan LDR 2 dan LDR 4.
4.1.6. Pengujian Sensor Tegangan
Pengujian ini dilakukan pada sensor tegangan yang telah dihubungkan dengan
arduino dan hasil pembacaan ditampilkan di LCD. Berikut listing programnya:
void battery() {float vbat,vb,vb1;
lcd.setCursor(6,1);
vbat=analogRead(6); //V batery A6 vb=(vbat/4.092);
lcd.print(vb1); delay(15); }
void solar() { lcd.setCursor(6,0); float vsc, vsc1,vsc2;
vsc=analogRead(7); //V solar cell A4 vsc1=(vsc/4.092);
vsc2=(vsc1/10); lcd.print(vsc2); delay(15);}
Dari hasil listing program diatas, maka dilakukan pengujian dengan
memberi tegangan yang sama ke kedua sensor. Hasil dari pengujian dapat
dilihat pada tabel 4.6.
V INPUT
8.00 7.65 4.38% 7.65 4.38%
9.00 8.63 4.11% 8.63 4.11%
10.00 9.65 3.50% 9.65 3.50%
11.00 10.61 3.55% 10.61 3.55%
12.00 11.63 3.08% 11.63 3.08%
13.00 12.66 2.62% 12.66 2.62%
14.00 13.69 2.21% 13.61 2.79%
15.00 14.71 1.93% 14.64 2.40%
Faktor kesalahan didapatkan dengan rumus:
0 0 100
V
V
V
input hasil input
FK
Dengan FK : Faktor kesalahan
Dari hasil pengujian diatas didapatkan tegangan yang diukur dan yang
ditampilkan mengalami perbedaan, yaitu drop voltage. Ini dikarenakan pengaruh
rangkaian yang lain seperti driver relay. Tetapi faktor kesalahan yang didapatkan
masih dalam dibawah ambang batas, yaitu 5%.
Gambar 4.4.Hasil pengujian sensor tegangan
4.1.7. Pengujian sistem secara keseluruhan
Setelah perangkat keras teruji dengan baik pada fungsi masing-masing,
kemudian dilakukan penyusunan masing-masing blok rangkaian sesuai dengan
skematik yang telah dibuat. Tujuan dari pengujian sestem secara keseluruhan
adalah untuk mengetahui apakah alat dapat bekerja sesuai perancangan awal atau
Setelah alat dinyalakan sensor LDR akan menerima cahaya, nilai dari sensor
ini dikirimkan ke Arduino dalam bentuk nilai ADC. Arduino akan
membandingkan nilai dari masing-masing LDR, dan memberikan isyarat ke
aktuator untuk menentukan posisi panel surya. Posisi panel surya dipertahankan
hingga terjadi pergantian posisi yang memiliki intensitas cahaya matahari
tertinggi.
Gambar 4.5.Pengujian secara keseluruhan
Pengujian ini dilakukan selama beberapa hari diruangan terbuka yang terkena
sinar matahari langsung. Pengujian dilakukan pada tanggal 9 Juni 2016 sampai
tanggal 17 Juni 2016, dilakukan dalam rentang waktu lama karena cuaca tidak
menentu sehingga akan mempengaruhi hasil data pengujian.
penjejak matahari dua axis dan pengujian tanpa penjejak matahari.
1. Pengujian sistem tanpa penjejak
Pengujian tegangan arus dan daya keluaran sel surya tanpa penjejak
matahari ini perlu dilakukan sebagai pembanding untuk melihat pengaruh
penggunaan sistem penjejak matahari terhadap keluaran sel surya. pengujian
ini dilakukan dalam waktu satu hari dengan pengambilan data dilakukan
setiap satu jam dari pukul 08.30 hingga 15.00 WIB. Waktu pengambilan data
dilakukan dari tanggal 16 Juni 2016.
Pengukuran nilai tegangan dilakukan dengan pengukuran secara open
circuit(OC). Sedangkan dalam pengukuran arus sel surya diberi beban resistif
dengan nilai resistansi sebesar 3 . Pada pengukuran arus, nilai resistansi
sengaja diperkecil agar arus yang terukur sesuai dengan arus yang dihasilkan
sel surya. Sebenarnya untuk dapat mengetahui arus maksimal sel surya,
pengukuran dilakukan dengan sistem short circuit (SC), karena untuk
menghindari kerusakan dari solar cell maka pengukuran diberi beban. Hasil
pengukuran arus dan tegangan ini digunakan untuk menghitung daya keluaran
sel surya. Dalam pengukuran ini nilai hambatan dalam alat ukur diabaikan,
karena dalam pengujian ini bertujuan untuk membandingkan hasil
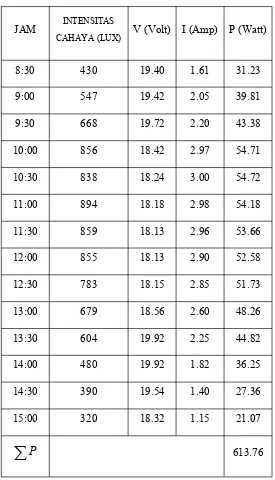
JAM INTENSITAS
CAHAYA (LUX) V (Volt) I (Amp) P (Watt)
8:30 430 19.40 1.61 31.23
9:00 547 19.42 2.05 39.81
9:30 668 19.72 2.20 43.38
10:00 856 18.42 2.97 54.71
10:30 838 18.24 3.00 54.72
11:00 894 18.18 2.98 54.18
11:30 859 18.13 2.96 53.66
12:00 855 18.13 2.90 52.58
12:30 783 18.15 2.85 51.73
13:00 679 18.56 2.60 48.26
13:30 604 19.92 2.25 44.82
14:00 480 19.92 1.82 36.25
14:30 390 19.54 1.40 27.36
15:00 320 18.32 1.15 21.07
P 613.76Tabel 4.6.Hasil pengukuran daya sel surya tanpa penjejak
Nilai daya didapatkan dengan rumus:
I V P
Dengan P : daya (Watt)
I : Arus(Amp)
Dari data diatas menunjukkan bahwa besar intensitas cahaya matahari
sangat berpengaruh terhadap penyerapan energi oleh solar panel. Semakin
besar intensitas matahari maka semakin besar pula daya yang diperoleh.
Untuk nilai arus sangat berpengaruh terhadap besar kecilnya intensitas cahaya
matahari, sedangkan nilai tegangannya relatif stabil. Total daya pada
pengujian tanpa penjejak adalah sebesar 613.76 Watt. Dan dengan rata-rata
adalah sebesar 43.84 Watt.
2. Pengujian sistem dengan penjejak
Pengujian daya keluaran sel surya dengan penjejak matahari dilakukan
untuk mengetahui pengaruh penggunaan sistem penjejak cahaya matahari
yang telah dirancang terhadap keluaran sel surya. Pengujian ini dilakukan
dalam satu hari yaitu tanggal 13 Juni 2016..
Pengujian dilakukan dalam waktu satu hari penuh dan dilakukan
pengambilan data setiap setengah jam sekali. Secara keseluruhan perlakuan
dalam pengujian ini sama dengan pengujian daya keluaran sel surya tanpa
penjejak matahari. Hanya dalam pengujian ini digunakan sistem penjejak
cahaya matahari untuk menggerakkan sel surya menghadap ke arah
ini diharapkan akan dapat meningkatkan daya yang dihasilkan sel surya. Hasil
pengukuran arus dan tegangan pada pengujian daya keluaran sel surya
menggunakan sistem penjejak diperlihatkan pada tabel 4.7
JAM INTENSITAS
CAHAYA (LUX) V (Volt) I (Amp) P (Watt)
8:30 528 19.38 1.92 37.21
9:00 625 19.31 2.31 44.61
9:30 673 18.89 2.38 44.96
10:00 662 18.92 2.40 45.41
10:30 828 19.31 2.60 51.25
11:00 840 19.05 3.22 62.18
11:30 827 19.40 3.00 57.15
12:00 825 18.53 2.78 51.51
12:30 877 18.37 2.89 53.09
13:00 763 19.48 2.80 54.54
13:30 805 19.75 2.84 56.09
14:00 720 19.75 2.84 56.09
14:30 698 18.31 2.50 45.78
15:00 648 18.71 2.42 45.28
P 709.76Tabel 4.7.Hasil pengujian sistem dengan penjejak
penjejak dan dengan penjejak adalah relatif stabil.
4.2. Pembahasan
Dari data pengujian sistem dengan penjejak dan sistem tanpa penjejak
diperoleh nilai daya yang berbeda. Berikut ini adalah hasil diagram karakteristik
daya pada kedua pengujian diatas.
Gambar 4.6.Karakteristik daya terhadap waktu
Dari gambar grafik diatas diperoleh perbedaan nilai daya yang dihasilkan
antara sistem dengan penjejak dan sistem tanpa penjejak. Nilai untuk sistem
dengan penjejak relatif stabil, perebedaan yang kelihatan adalah di saat pagi hari
dan sore hari.
4.2.1. Pengukuran konsumsi daya sistem penjejak matahari
Pengukuran konsumsi daya sistem penjejak matahari ini dilakukan dengan
dari battery.
Berikut adalah nilai daya pada sistem penjejak matahari:
Vinput = 12 volt.
Istandby = 0.17 A
Imax = 0.9 A
Pmax = 10.8 Watt
Pstandby = 2.04 Watt
Keterangan: Pstandby : Aktuator 1 dan 2 tidak aktif
Pmax : Aktuator 1 dan 2 aktif
4.2.2. Peningkatan energi
Dari pengujian tanpa penjejak dan pengujian dengan penjejak dapat dicari
peningkatan energi dari metode tanpa penjejak yang dibandingkan dengan metode
Dari hasil perhitungan diatas diperoleh peningkatan energi dari sistem
tanpa penjejak ke sistem dengan penjejak adalah 15.64%. Dari data ini dapat
dibuktikan bahwa penggunaan sistem penjejak matahari dua axis dapat
51
5.1. Kesimpulan
Berdasarkan pengamatan dan pembahasan sistem keseluruhan pada alat ini,
diperoleh kesimpulan sebagai berikut.
1. Sistem kinerja dari alat ini dapat bekerja sesuai dengan perencanaan yang
telah dibuat, sensor LDR ( Light Dependent Resistor) berfungsi sangat
baik karena sangat peka terhadap besar intensitas cahaya matahari
sehingga sistem kerja aktuator dapat mengarahkan panel surya ke arah
matahari secara tepat.
2. Perolehan daya sel surya dengan penjejak matahari akan lebih efektif
pada sore hari.
3. Keuntungan penggunaan sistem penjejak matahari adalah perolehan
energi naik 15.64% dari sistem tanpa penjejak.
4. Posisi matahari pada bulan dilakukan pengamatan yaitu bulan Juni
sedang berada di utara garis katulistiwa, sehingga panel surya
5.2. Saran
Berikut saran dari penulis untuk menjadikan alat ini lebih baik lagi
kedepannya dan dapat dikembangkan:
1. Seharusnya pengujian alat sel surya dengan penjejak matahari dilakukan
pengamatan selama satu tahun agar dapat mengetahui efektifitas dari alat
ini.
2. Alat ini dapat dikembangkan untuk menambahkan RTC dan modul LAN
sehingga agar mempermudah dalam pengamatan, pengamatan tinggal
dilakukan dalam ruangan.
3. Diharapkan kedepannya alat ini bisa membantu banyak manusia, dan
dapat dikembangkan sehingga alat ini bisa menjadi produk yang dapat
53
Anonim, Pengertian Penyebab dan Pengaruh Gerak Semu Tahunan Matahari,
(online)
http://www.gurupendidikan.net/2016/03/pengertian-penyebab-dan-pengaruh-gerak-semu-tahunan-matahari.html. Diakses Tanggal 7
Maret 2016.
Anonim, 2013, Aktuator, (online) https://id.wikipedia.org/wiki/Aktuator., Diakses
Tanggal 7 Maret 2016
Anonim, 2013, Energi Matahari, (online) http://www.greenpeace.org/seasia
/id/campaigns/perubahan-iklim-global/Energi-Bersih/Energi_matahari/,
Diakses Tanggal 7 Maret 2016
Tim penulis, Buku Panduan Energi yang tebarukan, (online) www.yumpu.com,
Diakses Tanggal 7 Maret 2016
Dickson Kho, 2015, Pengertian LDR(Light Dependent Resistor) dan Cara
Mengukurnya, (online)
HENNY SUKMAWATI DWI ARIES TANTYA, 2015, KENDALISOLAR CELL
BERBASIS ARDUINO, Program Diploma Teknik Elektro UGM,
Yogyakarta.
Pamungkas, Arindra. 2014. PENGGERAK PANEL SOLAR CELL
BERDASARCAHAYA MENGGUNAKAN MIKROKONTROLER
ATMEGA16. Program Diploma Teknik Elektro UGM, Yogyakarta.
Shahwil, Muhammad, 2013. Panduan Mudah Simulasi & Praktek Mikrokontroller
Arduino. Andi Offset. Yogyakarta.
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16, 2); // Set the LCD I2C address float timur,barat,utara,selatan,tb,us;
void setup() {
Serial.begin(9600); lcd.begin(16,2); lcd.init();
for(int i = 0; i< 3; i++) {
lcd.backlight(); delay(250);
lcd.noBacklight(); delay(250);
}
lcd.backlight();
lcd.setCursor(1,0); //Start at character 4 on line 0 lcd.print("CAHYO SETYO N.");
delay(1000);
lcd.setCursor(0,1);
lcd.print("20140120124 UMY"); delay(8000);
lcd.clear();
pinMode(2,OUTPUT); // Output aktuator1+ pinMode(3,OUTPUT); // Output actuator1-pinMode(4,OUTPUT); // Output aktuator2+ pinMode(5,OUTPUT); // Output actuator2-pinMode(6,OUTPUT);
}
void loop() {
} } }
// TEGANGAN SOLAR CELL lcd.setCursor(2,0); lcd.print("Vs="); lcd.setCursor(12,0); lcd.print("V");
// TEGANGAN BATERY lcd.setCursor(2,1); lcd.print("Vb="); lcd.setCursor(12,1); lcd.print("V");
{
battery(); solar(); delay(500);
}
utara=analogRead(0);
utara=(10.0*utara)/1024.0;
selatan=analogRead(1);
selatan=(10.0*selatan)/1024.0;
us=utara-selatan; delay(500);
if ((us<0.02 && us>-0.02) || utara<selatan) { digitalWrite(2, LOW);
{ digitalWrite(3, LOW); delay(10);
} else
{digitalWrite(3,HIGH); delay(10);
}
timur=analogRead(2);
timur=(10.0*timur)/1024.0;
barat=analogRead(3);
barat=(10.0*barat)/1024.0;
tb=timur-barat; delay(100);
if ((tb<0.01 && tb>-0.01) || timur<barat) { digitalWrite(4, LOW);
delay(10); }
else
{digitalWrite(4,HIGH); delay(10);
}
if ((tb<0.01 && tb>-0.01) || timur>barat) { digitalWrite(5, LOW);
delay(10); }
else
{digitalWrite(5,HIGH); delay(10);
vb1=(vb/10); lcd.print(vb1); delay(15);
if(vb1>=13)
{ digitalWrite(6,LOW); delay(10);
}
if(vb1<=12)
{ digitalWrite(6,HIGH); delay(10);}}
void solar() { lcd.setCursor(6,0); float vsc, vsc1,vsc2;
vsc=analogRead(6); //V solar cell A4 vsc1=(vsc/4.092);
vsc2=(vsc1/10); lcd.print(vsc2); delay(15);
An IMPORTANT NOTICE at the end of this data sheet addresses availability, warranty, changes, use in safety-critical applications, intellectual property matters and other important disclaimers. PRODUCTION DATA.
3-A Step-Down Voltage Regulator
1
1 Features
1• 3.3-V, 5-V, 12-V, and Adjustable Output Versions
• Adjustable Version Output Voltage Range: 1.2-V to 37-V ± 4% Maximum Over Line and Load Conditions
• Available in TO-220 and TO-263 Packages • 3-A Output Load Current
• Input Voltage Range Up to 40 V • Requires Only 4 External Components
• Excellent Line and Load Regulation Specifications • 150-kHz Fixed-Frequency Internal Oscillator • TTL Shutdown Capability
• Low Power Standby Mode, IQ, Typically 80μA
• High Efficiency
• Uses Readily Available Standard Inductors • Thermal Shutdown and Current-Limit Protection
2 Applications
• Simple High-Efficiency Step-Down (Buck) Regulator
• On-Card Switching Regulators • Positive to Negative Converter
3 Description
The LM2596 series of regulators are monolithic integrated circuits that provide all the active functions for a step-down (buck) switching regulator, capable of driving a 3-A load with excellent line and load regulation. These devices are available in fixed output voltages of 3.3 V, 5 V, 12 V, and an adjustable output version.
Requiring a minimum number of external components, these regulators are simple to use and include internal frequency compensation, and a fixed-frequency oscillator.
The LM2596 series operates at a switching frequency of 150 kHz, thus allowing smaller sized filter components than what would be required with lower frequency switching regulators. Available in a standard 7-pin TO-220 package with several different lead bend options, and a 7-pin TO-263 surface mount package.
Device Information(1)
PART NUMBER PACKAGE BODY SIZE (NOM)
LM2596 TO-220 (7) 14.986 mm × 10.16 mm TO-263 (7) 10.10 mm × 8.89 mm
(1) For all available packages, see the orderable addendum at the end of the data sheet.
Typical Application
2
Product Folder Links:LM2596
Submit Documentation Feedback Copyright © 1999–2016, Texas Instruments Incorporated
3 Description...1 4 Revision History...2 5 Description (continued)...3 6 Pin Configuration and Functions...3 7 Specifications...4
7.1 Absolute Maximum Ratings ...4
7.2 ESD Ratings...4
7.3 Operating Conditions ...4
7.4 Thermal Information ...4
7.5 Electrical Characteristics – 3.3-V Version...5
7.6 Electrical Characteristics – 5-V Version...5
7.7 Electrical Characteristics – 12-V Version...5
7.8 Electrical Characteristics – Adjustable Voltage Version ...5
7.9 Electrical Characteristics – All Output Voltage Versions ...6
7.10 Typical Characteristics ...7 8 Detailed Description...10
8.3 Feature Description...10
8.4 Device Functional Modes...14 9 Application and Implementation...15
9.1 Application Information...15
9.2 Typical Applications ...22 10 Power Supply Recommendations...31 11 Layout...31
11.1 Layout Guidelines ...31
11.2 Layout Examples...31
11.3 Thermal Considerations ...33 12 Device and Documentation Support...35
12.1 Community Resources...35
12.2 Trademarks ...35
12.3 Electrostatic Discharge Caution ...35
12.4 Glossary ...35 13 Mechanical, Packaging, and Orderable
Information...35
4 Revision History
NOTE: Page numbers for previous revisions may differ from page numbers in the current version.
Changes from Revision C (April 2013) to Revision D Page
• AddedESD Ratingstable,Feature Descriptionsection,Device Functional Modes,Application and Implementation
section,Power Supply Recommendationssection,Layoutsection,Device and Documentation Supportsection, and
Mechanical, Packaging, and Orderable Informationsection. ...1 • Removed all references to design softwareSwitchers Made Simple...1
Changes from Revision B (April 2013) to Revision C Page