PENGECATAN BODY MOBIL DENGAN MENGGUNAKAN
HARMONY SEARCH ALGORITHM
SKRIPSI
ANNAS MAIYASYA
081402044
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
PERMASALAHAN PENJADWALAN FLOW SHOP DALAM PROSES PENGECATAN BODY MOBIL DENGAN MENGGUNAKAN
HARMONY SEARCH ALGORITHM
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Teknologi Informasi
ANNAS MAIYASYA 081402044
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERMASALAHAN PENJADWALAN FLOW SHOP DALAM PROSES PENGECATAN BODY MOBIL DENGAN MENGGUNAKAN HARMONY SEARCH ALGORITHM
Kategori : SKRIPSI
Nama : ANNAS MAIYASYA
Nomor Induk Mahasiswa : 081402044
Program Studi : S1 TEKNOLOGI INFORMASI
Fakulttas : ILMU KOMPUTER DAN TEKNOLOGI INFORMASI (FASILKOM-TI) UNIVERSITAS SUMATERA UTARA
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Sarah Purnamawati, ST, M.Sc M. Fadly Syahputra, B.Sc, M.Sc.IT NIP. 19830226 201012 2 003 NIP. 19830129 200912 1 003
Diketahui/disetujui oleh S1 Teknologi Informasi Ketua,
iv PERNYATAAN
PERMASALAHAN PENJADWALAN FLOW SHOP DALAM PROSES PENGECATAN BODY MOBIL DENGAN MENGGUNAKAN
HARMONY SEARCH ALGORITHM
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, September 2014
PENGHARGAAN
Bismillahirrahmanirrahim, dengan menyebut nama ALLAH Yang Maha Pengasih dan Maha Penyayang. Dengan limpahan rahmat serta nikmat yang tidak terhitung nilainya penulisan skripsi ini dapat diselesaikan pada waktu yang tepat.
Dalam menyelesaikan sripsi ini, tidak terlepas dari bantuan dan kerja sama serta dukungan dari berbagai pihak, untuk itu penulis mengucapkan terima kasih kepada :
1. ALLAH SWT Rabb semesta alam, tidak ada patut yang disembah dan dinomor satukan melainkan hanya ALLAH SWT.
2. Nabi Muhammad SAW sebagai tauladan bagi manusia dan Rasulullah yang paling tepat dijadikan sebagai idola.
3. Pewaris peradaban sains dan teknologi, yaitu Al Khawarizmi, Al Jazari dll yang menjadi cikal bakal munculnya peradaban dunia modern sehingga bekembang pesatnya sains dan teknologi untuk menjadi punggung peradaban dunia.
4. Dosen pembimbing M. Fadly Syahputra, B.Sc, M.Sc.IT dan Sarah Purnamawati, ST, M.Sc yang telah memberikan bimbingan dan ilmunya dalam menyelesaikan sripsi ini.
5. Pegawai program studi S1 Teknologi Informasi Delima Harahap dan Faisal Hamid yang telah membantu untuk memperoleh gelar sarjana.
6. Seluruh dosen FASILKOM-TI yang telah memberikan bantuan dan dukungan untuk menyelesaikan skripsi ini.
7. Orang tua yang telah memberikan bantuan dan motivasi dalam menyelesaikan skripsi ini.
8. Seluruh teman-teman khususnya Billy Azzahry dan Franheit Sangapta yang telah memberikan bantuan dan dukungan sehingga skripsi ini dapat diselesaikan.
vi ABSTRAK
Automotive painting dalam proses pengecatan body mobil dengan menggunakan tenaga robot, membuat efisiensi dalam sistem produksi. Sistem produksi akan lebih efisien jika memperhatikan penjadwalan urutan mobil yang akan dilakukan painting
dengan mempertimbangkan bentuk body mobil. Penjadwalan flow shop merupakan model penjadwalan dimana job-job yang akan diproses seluruhnya mengalir pada arah/jalur produk yang sama. Masalah penjadwalan sering kali muncul jika terdapat n job yang akan diproses pada m buah mesin, yang harus ditetapkan mana yang harus dikerjakan terlebih dahulu dan bagaimana mengalokasikan job pada mesin sehingga diperoleh suatu proses produksi yang terjadwal. Harmony Search Algorithm adalah sebuah algoritma optimasi metaheuristik yang berdasarkan musik. Algoritma ini diinspirasi oleh observasi yang mengarah ke musik untuk mencari harmoni yang sempurna. Harmoni musik ini sejalan untuk menemukan opitmal dalam proses optimasi. Berdasarkan pengujian yang telah dilakukan, diperoleh urutan mobil yang optimal dengan nilai makespan yang minimum.
FLOW SHOP SCHEDULING PROBLEM IN PROCESS PAINTING CAR BODY USE HARMONY SEARCH ALGORITHM
ABSTRACT
Automotive painting in the process of painting a car body with the use of robots, create efficiency in production systems. Production system would be more efficient if the notice scheduling the order of painting a car that will be taking into account the shape of the car body. Flow shop scheduling is scheduling models where jobs-jobs that will be processed entirely in the flow direction / same product lines. Scheduling problem often arises when there are n jobs to be processed on m machine, which should be established which should be done first and how to allocate the job to the machine in order to obtain a production process that is scheduled. Harmony Search Algorithm is a metaheuristic optimization algorithm which is based on music. The algorithm is inspired by the observation that leads to music for perfect harmony. This musical harmony is line to find opitmal in the optimization process. Based on the testing that has been done, the car obtained optimal sequence with minimum makespan value.
viii
2.1.3. Penggolongan cat berdasarkan fungsi 8
2.1.4. Process flow paint shop 9
2.2. Definisi Penjadwalan 12
2.4.1. Inisialisasi masalah optimasi dan parameter algoritma 22
2.4.2. Inisialisasi harmony memory 23
2.4.4. Harmony memory update 24
2.4.5. Check stopping criterion 24
2.5. Penelitian Terdahulu 25
BAB 3 ANALISIS DAN PERANCANGAN SISTEM 27
3.1. Mobil yang Digunakan 27
3.2. Penghitungan Waktu Pengecatan Body Mobil 28
3.3. Penerapan Algoritma 30
3.3.1. Input parameter 32
3.3.2. Inisialisasi harmony memory 32
3.3.3. Improvisasi new harmony 33
3.3.4. Fungsi objektif 36
3.3.5. Harmony memory update 38
3.3.6. Kriteria berhenti 38
3.4. Analisis Sistem 38
3.4.1. System requirement 38
3.4.2. Process modelling 39
3.4.3. Antarmuka sistem 41
BAB 4 HASIL DAN PEMBAHASAN 47
4.1. Rancangan dan Implementasi Sistem 47
4.1.1. Kebutuhan hardware 47
4.1.2. Kebutuhan software 48
4.2. Pengujian Data 48
4.2.1. Penghitungan makespan minimum 49
BAB 5 KESIMPULAN DAN SARAN 51
5.1. Kesimpulan 51
5.2. Saran 51
x DAFTAR TABEL
Hal.
TABEL 2.1 Penelitian Terdahulu 25
TABEL 3.1 Ukuran Dimensi Mobil 28
TABEL 3.2 Parameter Standart Pengecatan 29
TABEL 3.3 Waktu Pengecatan 30
TABEL 3.4 Contoh Waktu Flow Shop Scheduling 33
TABEL 3.5 Penghitungan Makespan 37
TABEL 4.1 Hasil Pengujian 49
DAFTAR GAMBAR
Hal.
GAMBAR 2.1 Flow Process Painting 9
GAMBAR 2.2 Pengecatan Body Mobil dengan Automative Paint 12
GAMBAR 2.3 Alur Flow Shop 18
GAMBAR 2.4 Peta Penjadwalan Flow Shop 19
GAMBAR 2.5 Arsitektur Flow Shop 20
GAMBAR 2.6 Analogi Improvisasi Musik 21
GAMBAR 3.1 Flowchart Harmony Search Algorithm 31
GAMBAR 3.2 Context Diagram Sistem Penjadwalan Flow Shop 39
GAMBAR 3.3 DFD Level 0 40
GAMBAR 3.4 DFD Level 1 41
GAMBAR 3.5 Tampilan Memasukkan Nama File 42
GAMBAR 3.6 Tampilan Kesalahan Memasukkan File 42
GAMBAR 3.7 Tampilan File Berhasil Diinput 43
GAMBAR 3.8 Tampilan Jumlah Mobil Berhasil Diinput 44
GAMBAR 3.9 Tampilan HMS 45
vi ABSTRAK
Automotive painting dalam proses pengecatan body mobil dengan menggunakan tenaga robot, membuat efisiensi dalam sistem produksi. Sistem produksi akan lebih efisien jika memperhatikan penjadwalan urutan mobil yang akan dilakukan painting
dengan mempertimbangkan bentuk body mobil. Penjadwalan flow shop merupakan model penjadwalan dimana job-job yang akan diproses seluruhnya mengalir pada arah/jalur produk yang sama. Masalah penjadwalan sering kali muncul jika terdapat n job yang akan diproses pada m buah mesin, yang harus ditetapkan mana yang harus dikerjakan terlebih dahulu dan bagaimana mengalokasikan job pada mesin sehingga diperoleh suatu proses produksi yang terjadwal. Harmony Search Algorithm adalah sebuah algoritma optimasi metaheuristik yang berdasarkan musik. Algoritma ini diinspirasi oleh observasi yang mengarah ke musik untuk mencari harmoni yang sempurna. Harmoni musik ini sejalan untuk menemukan opitmal dalam proses optimasi. Berdasarkan pengujian yang telah dilakukan, diperoleh urutan mobil yang optimal dengan nilai makespan yang minimum.
FLOW SHOP SCHEDULING PROBLEM IN PROCESS PAINTING CAR BODY USE HARMONY SEARCH ALGORITHM
ABSTRACT
Automotive painting in the process of painting a car body with the use of robots, create efficiency in production systems. Production system would be more efficient if the notice scheduling the order of painting a car that will be taking into account the shape of the car body. Flow shop scheduling is scheduling models where jobs-jobs that will be processed entirely in the flow direction / same product lines. Scheduling problem often arises when there are n jobs to be processed on m machine, which should be established which should be done first and how to allocate the job to the machine in order to obtain a production process that is scheduled. Harmony Search Algorithm is a metaheuristic optimization algorithm which is based on music. The algorithm is inspired by the observation that leads to music for perfect harmony. This musical harmony is line to find opitmal in the optimization process. Based on the testing that has been done, the car obtained optimal sequence with minimum makespan value.
BAB I
PENDAHULUAN
1.1. Latar Belakang
Perkembangan di dunia industri semakin lama mengalami peningkatan dilihat dari kualitas maupun kuantitas produksinya. Mulai dari menggunakan tenaga manusia yang terampil sampai dengan menggunakan mesin dalam melakukan kegiatan produksi sehingga kecil kemungkinan terjadinya kesalahan yang disebabkan kesalahan manusia (human error). Di negara maju hampir semua industri melakukan kegiatan produksi dengan menggunakan tenaga mesin, sehingga manusia hanya mengoperasikan mesin dalam kegiaatan produksinya.
Walaupun sudah menggunakan tenaga mesin dalam melakukan kegiatan produksinya, setiap perusahaan industri tetap berusaha agar kegiatan produksinya menghasilkan suatu hasil yang optimum. Penjadwalan merupakan salah satu upaya perusahaan industri untuk memperoleh hasil yang optimum. Penjadwalan produksi diupayakan untuk mendapatkan suatu penugasan pekerjaan yang efektif pada setiap stasiun kerja, agar tidak terjadi penumpukan job sehingga dapat mengurangi waktu idle (menganggur) atau waktu menunggu untuk proses pengerjaan berikutnya (Masruroh, 2012).
Flow shop scheduling merupakan model penjadwalan dimana job-job yang akan diproses seluruhnya mengalir pada arah/jalur produk yang sama. Dengan perkataan lain, job-job memiliki routing kerja sama. Masalah penjadwalan sering kali muncul jika terdapat n job yang akan diproses pada m buah mesin, yang harus ditetapkan mana yang harus dikerjakan terlebih dahulu dan bagaimana mengalokasikan job pada mesin sehingga diperoleh suatu proses produksi yang terjadwal (Ginting, 2006).
Harmony Search Algorithm adalah sebuah algoritma optimasi metaheuristik yang berdasarkan musik. Algoritma ini diinspirasi oleh observasi yang mengarah ke musik untuk mencari harmoni yang sempurna. Harmoni musik ini sejalan untuk menemukan opitmal dalam proses optimasi.
1.2. Rumusan Masalah
Dalam proses pengecatan mobil dengan variasi bentuk mobil yang berbeda di mesin pengecatan yang sama, masih ditemukan waktu menunggu. Maka dibutuhkan solusi optimal untuk mendapatkan penjadwalan urutan mobil yang efektif dan efisien dalam proses pengecatan. Bagaimana mendapatkan urutan mobil yang efektif dan efisien dalam proses pengecatan, sehingga memperoleh nilai makespan yang minimum dalam menyelesaikan permasalahan penjadwalan flow shop.
1.3. Batasan Masalah
Batasan masalah yang penulis buat dalam penelitian ini adalah sebgai berikut :
a) Variasi bentuk mobil dibatasi hanya dua puluh jenis bentuk mobil dengan luas bidang permukaan body mobil yang berbeda.
b) Menggunakan dua mesin pengecat atau setiap mobil melewati dua proses pengecatan, yaitu basecoat dan clearcoat.
c) Pada tahapan basecoat turbobell yang digunakan berjumlah satu, sedangkan pada clearcoat turbobell yang digunakan berjumlah tiga.
3
makespan.
e) Body mobil yang akan dicat menggunakan single colour.
1.4. Tujuan
Tujuan dari penelitian ini adalah untuk mendapatkan urutan mobil yang efektif dan efisien sehingga memperoleh nilai makespan yang minimum dalam penjadwalan flow shop.
1.5. Manfaat
Manfaat dari penelitian ini adalah sebagai berikut :
a) Memperoleh jumlah produksi mobil yang lebih maksimal karena mengefisienkan waktu proses pengecatan.
b) Menjadi penyelesaian permasalahan penjadwalan flow shop.
1.6. Sistematika Penulisan
Tugas akhir ini terdiri dari enam bab dengan sistematika penulisan sebagai berikut :
Bab I Pendahuluan
Bab pendahuluan berisi mengenai hal-hal yang mendasari dilakukannya penelitian serta mengidentifikasi masalah penelitian. Bab pendahuluan ini terdiri dari latar belakang, rumusan masalah, batasan masalah, tujuan dan manfaat penelitian.
Bab II Landasan Teori
Bab III Metodologi
Dalam bab metodologi ini diuraikan penelitian yang dilakukan untuk mengembangkan dan menyelesaikan masalah yang akan diteliti.
Bab IV Hasil dan Pembahasan
Pada bab hasil dan pembahasan akan memaparkan hasil uji coba algoritma yang telah dilakukan untuk mennelesaikan masalah flow shop.
Bab V Kesimpulan dan Saran
BAB 2
LANDASAN TEORI
2.1. Pengecatan Body Mobil
Pengecatan adalah salah satu jenis pelapisan permukaan dimana bahan pelapisnya
telah diberi pewarna (cat). Pengecatan secara tradisional digambarkan sebagai suatu
proses pewarnaan. Proses pengecatan tersebut biasa digunakan untuk pekerjaan akhir
(finishing) produk-produk dari logam, kayu, plastik dan lain-lain (Saputra, 2009).
Proses mengecat merupakan suatu proses yang penting dalam industri automotif.
Proses ini bertujuan untuk memberi penampilan yang menarik dan menyediakan
lapisan perlindungan melawan cuaca dan karat (Farid, 2008).
Cat dan industri pengecatan terdiri dari berbagai jenis operasi, mulai dari
bervolume besar original equipment manufactures (OEMs) yang berjalan otomatis,
sistem monitor tertutup untuk toko melakukan kontrak kerja dengan peralatan yang
dioperasikan secara manual.
Lapisan tipis cat konvensioanl hanya setebal ramut manusia, namun terdiri dari
empat lapisan. Dalam proses konvensioanl, sasis otomotif disiapkan untuk dicelupkan
dalam electrocoat dan kemudian proses primer dilakukan untuk memberikan
perlindungan korosi. Untuk adhesi, lapian ini dipanggang diatas sasis di dalam oven.
Kemudian basecoat menyediakan warna yang sebenarnya dan clearcoat untuk
penampilan dan tahan gores. Sasis ini dipanggang lagi di dalam oven untuk
2.1.1. Sejarah automotive painting
Sejak automobile pertama sekali dibuat pada akhir tahun 1800, telah banyak perubahan pada teknologi cat untuk melindungi dan memperindah alat transportasi, dari produk alami hingga high tech polymer. Pada awal abad ke 20 teknologi automotive paint diawali dengan air-dry varnish system yang digunakan untuk mebel yang terbuat dari kayu dan kereta kuda. Pilihan warna kereta kuda pada saat itu hanya warna hitam.
Sejarah cat pelindung kembali lagi pada kereta kuda. Cat pelindung utama menggunakan lemak hewan. Kemudian digunakan lilin dan minyak. Lemak dan minyak digunakan untuk membantu memperkuat cat dari embun dan memelihara kayu dari panas. Lemak dan minyak juga membantu memperhalus dan memperindah. Bahan-bahan ini telah sering digunakan untuk memelihara dan melindungi produk
mereka. Pada akhirnya metode protecting dan beautifying digunakan untuk automobiles, sama halnya dengan kereta kuda. Secara cepat automobiles juga menggunakan kayu dan sangat terkenal dengan cat yang bagus.
Dalam menggunakan logam besi dan baja, harus dicat untuk mencegah terjadinya korosi dan walaupun beberapa bagian body disampingnya galvanis, cat merupakan solusi yang tepat karena sifatnya yang protective dan decorative.
Kekurangan dari cat ini adalah mudah digunakan, lebih tahan lama dan cepat kering, sehingga menjadi rintangan yang nyata dalam efisiensi produksi mesin mobil. Seperti kemajuan dalam ilmu kimia yang ditemukan di dalam laboratorium, kemajuan teknologi pengecatan sudah ketinggalan zaman. Pada tahun 1923, E.I. DuPont De Nemours mengembangkan sistem nitrocellulose lacquer, yang menawarkan banyak pilihan warna dan lebih mudah mengaplikasikannya dengan menggunakan spray guns. Akan tetapi, sistem lacquer membutuhkan aplikasi spray dengan 3 sampai 4 lapisan cat untuk memperoleh hasil yang diinginkan. Lacquers juga memiliki daya tahan yang buruk terhadap beberapa zat kimia.
Nitrocellulose paints dalam menggunakan aplikasi spray dan waktu pengeringan cukup signifikan dengan waktu yang lebih pendek. Keuntungan lainnya adalah jumlah warna yang tersedia lebih banyak. Ilmu kimia memberikan kontribusi kepada industri automotive dengan menghasilkan alkyd resins. Alkyd resin digunakan dalam pembuatan alkyd enamels. Alkyd resins diperoleh dari glycerin yang diproses
7
bahan peledak dan dalam zat pelarut yang digunakan dalam cat.
Alkyd enamels dari tahun 1930-an dikenalkan dengan cepat kemampuannya untuk diakui seperti pemrosesan modren automotive finishing. Enamels menawarkan sebuah gloss finish yang bagus dan color palette yang layak. Sebelum berkembangnya proses pengecatan, alkyd enamels lebih tahan lama dan tentu saja lebih cepat. Ketika perkembangan domestik dimulai lagi setelah perang dunia II, acrylic lacquers diberikan OEM dan meneruskan kembali industri untuk selanjutnya. Lacquer diberikan waktu pengeringan yang sangat cepat dibandingkan enamels. Ini diwujudkan dalam meningkatkan daya produksi yang signifikan pada jalur perakitan yang difasilitasi automobile manufaktur untuk memenuhi permintaan yang tinggi pasca perang. Formulasi acrylic lacquer juga membawa permukaan yang lebih besar untuk formulasi warna yang tersedia. Nitrocellulose lacquer digunakan pada beberapa
mobil penumpang sampai sekitar tahun 1957, ketika acrylic lacquer diperkenalkan. Acrylic lacquers menawarkan daya tahan dan kecerahan yang lebih baik serta warna yang tepat terutama metalliccs.
Enamels mengungguli lacquers dengan mengeliminasi buffing yang dibutuhkan setelah proses pengeringan untuk mencapai finish high-gloss dan juga memberikan peningkatan daya tahan pada kerusakan UV. Enamels juga diuntungkan para penggunanya dengan mempertahankan daya tahan dan melebihi kecepatan metode aplikasi sebelumnya. Penggunaan katalis, yang segera dimulai setelah pengenalan acrylic enamels, meningkatkan kinerja hingga 50 persen lebih lacquers untuk menyediakan perbaikan lebih lanjut dalam penampilan dan daya tahan, tipe baru finish, yang disebut “Basecoat / Clearcoat,” dikembangkan dan diperkenalkan pada tahun 70-an. Topcoat paint system dipisah menjadi enamel basecoat berpigmen diikuti oleh clear finish. Kunci untuk teknologi ini adalah pengembangan bahan clearcoat dengan daya tahan yang unggul di semua iklim. Awalnya, biaya basecoat/clearcoat paint system mahal dan hanya digunakan pada beberapa high-end automobile finishes. Namun, perbaikan dalam teknologi material dan pemrosesan membantu untuk mengurangi biaya dan pada akhir tahun 80-an paint system ini telah tersebar luas. Bahkan, hanya sebagian kecil dari mobil yang diproduksi saat ini tidak menggunakan basecoat/clearcoat paint system (Farid, 2008).
Keuntungan dari dua lapisan sistem ini banyak. Ini sangat meningkatkan gloss
formulator cat menggabungkan peredam UV untuk melindungi clearcoat dan pigmen basecoat dari oksidasi. Oleh karena itu, dapat memakan waktu bertahun-tahun untuk menimbulkan efek memudar.
2.1.2. Fungsi pengecatan
Adapun fungsi pengecatan untuk bahan logam maupun non logam adalah sebagai berikut (Saputra, 2009):
a) Fungsi Dekorasi (hiasan)
Pengecatan bertujuan untuk memperindah benda / barang yang dicat, sehingga barang akan mempunyai nilai seni ekonomi dan daya tarik lebih tinggi dibandingkan sebelumnya.
b) Fungsi Pelindung
Pengecatan bertujuan untuk melindungi permukaan bahan material yang dicat, terutama pada bahan logam. Perlindungan ini untuk menghambat terjadinya korosi akibat pengaruh cuaca / lingkungan sekitar, sehingga dapat memperpanjang usia logam tersebut dari korosi / karat.
c) Fungsi Khusus
Pengecatan yang digunakan untuk tujuan-tujuan khusus seperti, pemantulan cahaya, isolasi dan peredam suara.
2.1.3. Penggolongan cat berdasarkan fungsi
Adapun penggolongan cat berdasarkan fungsi adalah sebagai berikut :
a) Top Coat, yaitu lapisan terluar yang langsung terlihat oleh mata.
b) Under Coat, yaitu lapisan yang ada di bawah lapisan top coat.
9
d) Surfacer, yaitu under coat yang digunakan untuk mengisi permukaan yang tidak sempurna. Surfacer diformulasikan sedemikian rupa sehingga melalui pengecatan surfacer dapat diperoleh permukaan yang halus sebelum lapisan top coat diaplikasikan.
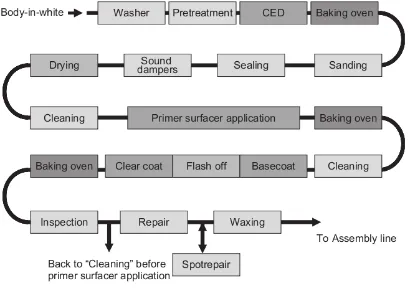
2.1.4. Process flow paint shop
Process painting body mobil tidak hanya terfokus kepada pengecatan body mobil saja, akan tetapi terdapat beberapa tahapan proses yang melibatkan proses pengovenan selain pengecatan. Secara keseluruhan flow process painting digambarkan pada gambar 2.1. (Streitberger dan Dossel, 2008):
Gambar 2.1 Flow Process Painting
a) Washer
Pada proses awal dari proses painting body mobil adalah wahser, yaitu
b) Pretreatment
Pretreatment adalah proses dimana body mobil mengalami proses pembersihan dan pelapisan dengan bahan kimia, yaitu meningkatkan adhesi dan perlindungan korosi.
c) CED
CED merupakan proses tahap pengecatan dengan cara dicelup yang berfungsi untuk memperkuat anti karat.
d) Baking Oven
Baking oven adalah proses yang terjadi di dalam ruang oven untuk mempercepat proses pengeringan body mobil.
e) Sanding
Sanding merupakan proses pengamplasan body mobil untuk menghaluskan permukaan body mobil agar dapat diproses pada tahap pengecatan selanjutnya.
f) Sealing
Sealing adalah proses pemberian sealer pada sela-sela body mobil yang bertujuan supaya air tidak masuk ke dalam mobil atau mesin jika terkena air.
g) Sound Dampers
Sound dampers berfungsi untuk mengurangi suara bising yang diakibatkan oleh perputaran roda atau gesekan ban dengan aspal serta suara bising mesin yang akan mengurangi kenyamanan dalam berkendara. Pada tahap ini menggunakan aplikasi penyemprotan dengan ketebalan 0.3 mm. Selain itu sound dampers dapat juga berfungsi sebagai peredam hawa panas baik yang ditimbulkan dari mesin atau hawa panas dari luar.
h) Drying
11
i) Cleaning
Cleaning merupakan proses pembersihan body mobil dari debu dan kotoran agar dapat dicat pada tahap selanjutnya dengan menggunakan spray bertekanan angin.
j) Primer Surfacer Application
Primer Surfacer Application berfungsi untuk memberi ikatan antara lapisan primer dengan topcoat.
k) Basecoat
Basecoat merupakan tahap pengecatan yang berfungsi untuk melekatkan antara CED dengan Clearcoat sehingga lebih sempurna serta sebagai dasar
pewarnaan pada body mobil.
l) Flash Off
Pada tahap ini body mobil yang sudah selesai dicat basecoat akan dihentikan sejenak untuk proses pengeringan sebelum masuk ke tahap selanjutnya.
m) Clearcoat
Clearcoat merupakan tahap pengecatan lapisan akhir dan paling atas yang berguna sebagai pelindung anti gores dan agar tampak lebih mengkilap.
n) Inspection
Proses ini adalah proses akhir dari suatu rangkaian pengecatan yaitu pemeriksaan secara menyeluruh dari hasil pengecatan untuk memastikan ada tidaknya defect yang melebihi standar pemeriksaan. Pemeriksaan dilakukan secara visual dalam ruangan yang sangat terang untuk memudahkan inspeksi.
o) Repair
p) Spotrepair
Spotrepair merupakan proses perbaikan atau pemolesan jika ada timbul bintik-bintik pada body mobil.
q) Waxing
Waxing adalah proses untuk menutupi permukaan cat secara menyeluruh. Waxing berfungsi untuk melindungi body mobil dari sengatan sinar ultra violet dan goresan dari oxidan di udara serta melindungi dari kotoran.
Dalam hal ini penulis memfokuskan masalah proses pengecatan pada tahap topcoat, yaitu basecoat dan clearcoat untuk dicari optimasi dan urutan jenis body mobil yang akan melewati proses basecoat dan clearcoat dengan mempertimbangkan
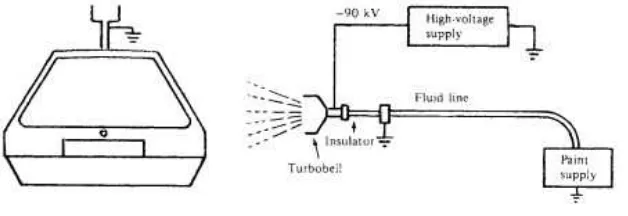
luas bidang permukaan body mobil. Pada gambar 2.2 merupakan gambaran ketika dilakukan pengecatan body mobil :
Gambar 2.2 Pengecatan Body Mobil dengan Autumotive Paint
Dari gambar 2.2 dapat dilihat sebuah body mobil yang sedang dilakukan pengecatan dengan teknologi robot. Turbobell akan memancarkan cat yang akan
disemprotkan ke body mobil. Selain itu turbobell sudah diprogram agar bergerak sesuai dengan bentuk body mobil.
2.2. Definisi Penjadwalan
13
Semakin kompleks dalam sebuah sistem produksi, maka semakin dibutuhkan sebuah penjadwalan produksi yang baik.
Penjadwalan didefinisikan sebagai proses pengaturan waktu dari suatu kegiatan operasi, secara umum penjadwalan bertujuan untuk meminimalkan waktu proses, waktu tunggu langganan dan tingkat persediaan, serta penggunaan yang efisien dari fasilitas, tenaga kerja dan peralatan (Masruroh, 2008). Penjadwalan yang baik akan memberikan dampak positif, yaitu rendahnya biaya operasi dan waktu pengiriman.
Penjadwalan adalah suatu rencana pengaturan urutan kerja serta pengalokasian sumber, baik berupa waktu maupun fasilitas yang ada untuk menyelesaikan sekumpulan tugas dalam jangka waktu tertentu (Azmi, 2012). Penjadwalan bisa dikatakan sebagai suatu fungsi pengambilan keputusan, yaitu suatu proses untuk
menentukan jadwal yang mengalokasikan aktifitas pada sumber daya.
Definisi yang lain, Azmi (2012) menyatakan bahwa penjadwalan pesanan (job) berkaitan dengan bagaimana megalokasikan job pada mesin-mesin yang tersedia dalam urutan tertentu sehingga tujuan penjadwalan dapat tercapai dan kendala-kendala yang ada dapat diatasi dengan memuaskan,
Penjadwalan merupakan alat ukur yang baik untuk perencanaan agregat. Pesanan-pesanan pada tahap ini akan ditugaskan pertama kalinya pada sumber daya tertentu (fasilitas, pekerja, peralatan), kenudian dilakukan pengurutan kerja pada tiap-tiap pusat pemrosesan sehingga dicapai optimalitas utilisasi kapasitas yang ada. Adapun fungsi pokok dari penjadwalan produksi adalah untuk membuat agar proses produksi dapat berjalan lancar sesuai waktu yang telah direncanakan, sehingga bekerja dengan kapasitas penuh dengan biaya seminimal mungkin serta kuantitas produk yang diinginkan dapat diproduksi tepat pada waktunya (Masruroh, 2008).
2.2.1. Permasalahan penjadwalan
Permasalahan penjadwalan adalah permasalahan pengalokasian pekerjaan ke mesin, pada kondisi mesin mempunyai kapasitas dan jumlah terbatas. Secara umum masalah penjadwalan dapat dijelaskan sebagai n job (J1,, J2, ... Jn) yang harus diproses di m
mesin (M1, M2, ... Mn). Waktu yang diperlukan untuk memproses pekerjaan J1 pada
mesin M adalah P setiap job harus diproses tanpa dihentikan selama waktu proses p
tersedia sejak waktu nol (Budiansyah, 2005).
Pemecahan permasalahan yang diinginkan adalah mendapatkan jadwal yang optimal, yaitu menyelesaikan semua pekerjaan dengan mendapatkan jadwal yang optimal yaitu menyelesaikan semua pekerjaan dengan adanya keterbatasan kapasitas dan keterbatasan mesin dengan memenuhi fungsi tujuannya.
2.2.2. Istilah dalam penjadwalan
Dalam permasalahan penjadwalan terdapat beberapa istilah-istilah yang akan dijumpai pada substansi pembahasannya, antara lain :
a) Processing Time / Waktu proses (Pi)
Waktu yang diperlukan untuk menyelesaikan operasi atau proses dari pekerjaan pada mesin i, waktu proses ini telah mencakup waktu untuk persiapan dan pengaturan proses.
b) Release Date (ri)
Release date bisa disebut juga ready date. Release date adalah waktu ketika job sampai di sistem, yang mana waktu tercepat ketika job j dapat memulai proses.
c) Due Date (di)
Due date adalah batas akhir pekerjaan ke mesin i boleh diselesaikan. Lewat dari batas ini suatu job dikatakan tardy.
d) Completion Time / Waktu Penyelesaian (Ci)
Completion time adalah rentang waktu sejak pekerjaan pertama dimulai (t = 0) hingga pekerjaan ke mesin i diselesaikan.
e) Lateness (Li)
Lateness adalah penyimpangan dari waktu penyelesaian hingga saat due date. Li = Ci – di < 0, saat penyelesaian memenuhi batas (early job).
15
f) Tardiness (Ti)
Tardiness merupakan keterlambatan penyelesaian suatu pekerjaan dari saat due date.
Ti = Max {0, Li}
1≤i≤n
g) Earliness
Earliness merupakan saat penyelesaian terlalu dini (sebelum due date), earliness juga disebut lateness negative.
Ei = Min {Li, 0}
h) Slack (Si)
Slack adalah waktu sisa yang tersedia bagi suatu pekerjaan. Si = di – ti
i) Makespan (Ms)
Makespan adalah jangka waktu penyelesaian suatu pekerjaan yang merupakan penjumlahan dari seluruh waktu proses suatu mesin.
j) Flow Time (Fi)
Flow time adalah routing waktu mulai dari pekerjaan ke mesin i siap untuk dikerjakan hingga pekerjaan selesai.
k) Ready Time (Ri)
Ready time adalah saat pekerjaan ke mesin i dapat dikerjakan (selesai dijadwalkan).
2.2.3. Jenis permasalahan penjadwalan
Permasalahan penjadwalan dapat dilkasifikasikan berdasarkan faktor-faktor berikut ini, yaitu :
a) Jumlah Mesin
• Penjadwalan m mesin
b) Pola Kedatangan Job • Statik
Semua job datang secara bersamaan dan semua fasilitas tersedia pada saat kedatangan job.
• Dinamik
Job datang secara acak selama masa penjadwalan.
c) Ketidakpastian pada Job dan Mesin • Deterministik
Terdapat kapasitas tentang job dan mesin, misalnya tentang waktu kedatangan, waktu setup dan waktu proses.
• Stokastik
Terdapat ketidakpastian mengenai job dan mesin.
d) Pola Aliran Produksi • Flow Shop
Pada pola aliran proses flow shop, semua job cenderung memiliki urutan operasi (routing) yang sama.
• Job Shop
Pada pola aliran proses job shop, masing-masing job memiliki urutan operasi yang unik. Setiap job bergerak dari satu mesin / stasiun kerja menuju mesin / stasiun kerja yang lain dengan pola yang berbeda-beda.
2.2.4. Fungsi objektif penjadwalan
17
a) Makespan
Makespan adalah jumlah waktu yang dibutuhkan untuk menyelesaikan seluruh proses pada semua tahapan yang dijadwalkan mulai dari saat pemrosesan tahapan pertama sampai tahapan terakhir selesai diproses.
Cmaks = Mmaks {Ci}
b) Maximum Flowtime
Fmaks = Mmaks {Fi}
c) Mean Flowtime
Fungsi objektif ini menunjukkan rata-rata waktu yang dihabiskan setiap
tahapan. Flowtime adalah selisih completion time dengan ready time.
d) Mean Weight Flowtime
Pengertian mean weight flowtime mirip dengan mean flowtime, tetapi mempertimbangkan prioritas pekerjaan setiap job dalam perhitungannya.
e) Maximum Lateness
Maximum Lateness adalah nilai lateness yang terbesar. Lateness adalah selisih antara waktu penyelesaian job dengan due date-nya. Lateness bernilai negatif jika waktu penyelesaian job lebih awal dari due date dan bernilai positif jika job diselesaikan setelah due date.
Cmaks = Max{Li}
f) Mean Tardiness
Mean tardiness adalah rata-rata keterlambatan (positif lateness) untuk seluruh job yang dijadwalkan.
g) Mean Weight Tardiness
h) Number of Tardy Job
Number of tardy adalah menunjukkan banyaknya job yang mengalami keterlambatan (positif lateness).
i) Utilitas Mesin (Um)
Utilitas mesin adalah perbandingan interval waktu mesin m melakukan pemrosesan dibebani dengan makespan. Fungsi objektif ini berdasrkan atribut shop floor.
2.3. Flow Shop Scheduling
Flow shop scheduling merupakan model penjadwalan dimana job-job yang akan
diproses seluruhnya mengalir pada arah/jalur produk yang sama. Dengan perkataan lain, job-job memiliki routing kerja sama. Masalah penjadwalan sering kali muncul jika terdapat n job yang akan diproses pada m buah mesin, yang harus ditetapkan mana yang harus dikerjakan terlebih dahulu dan bagaimana mengalokasikan job pada mesin sehingga diperoleh suatu proses produksi yang terjadwal (Ginting, 2006).
Penjadwalan flow shop sering kali diselesaikan dengan mengembangkan permutasi urutan job yang akan diurutkan. Job bersifat independent, secara serempak tersedia pada waktu nol dan urutan mesin dari semua pekerjaan sama. Masing-masing job memiliki waktu proses pada masing-masing mesin. Preemption tidak diizinkan. Tujuan penjadwalan pada umumnya adalah menemukan suatu urutan job yang bertujuan untuk meminimalisasi makespan.
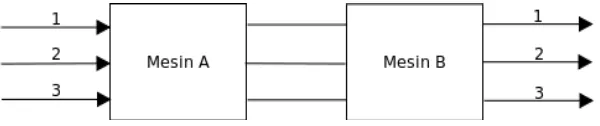
Gambar 2.3 Alur Flow Shop
Pada gambar 2.3 terdapat 2 mesin, yaitu mesin A dan mesin B serta 3 job. Setiap job yaitu 1-2-3 merupakan job yang akan melewati mesin A dan mesin B secara berurut. Setiap job harus melewati mesin A terlebih dahulu, setelah melewati mesin A
19
Kumar dan Suresh (2009) mengatakan bahwa permasalahan flow shop scheduling dapat dikarakteristikan sebagai berikut :
a) Tersedia satu set dari multiple-operation job untuk pemrosesan pada waktu nol (setiap job membutuhkan m operasi dan setiap operasi membutuhkan mesin yang berbeda).
b) Pengaturan waktu untuk operasi adalah urutan tersendiri dan dimasukkan dalam pemrosesan waktu.
c) Pendeskripsian job diketahui terlebih dahulu.
d) m mesin yang berbeda tersedia terus-menerus.
e) Setiap operasi individu job diproses sampai selesai tanpa istirahat.
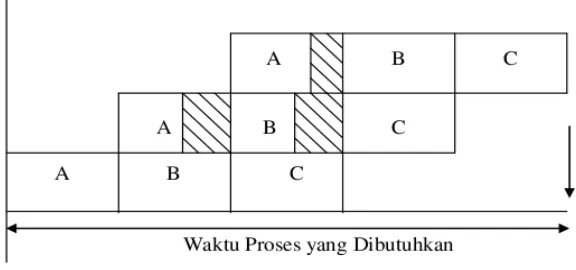
Gambar 2.4 Peta Penjadwalan Flow Shop
Pada gambar 2.4 dijabarkan proses penjadwalan dimana setiap job harus melewati setiap mesin. Gambar yang diarsir merupakan waktu kosong yang terjadi ketika urutan job yang diproses dari A-B-C. Dalam penelitian ini dilakukan bagaimana agar waktu kosong tersebut dapat diminimalkan sehingga waktu yang dibutuhkan menjadi optimal.
Proses penjadwalan flow shop pada pengecatan body mobil dapat dilihat dalam
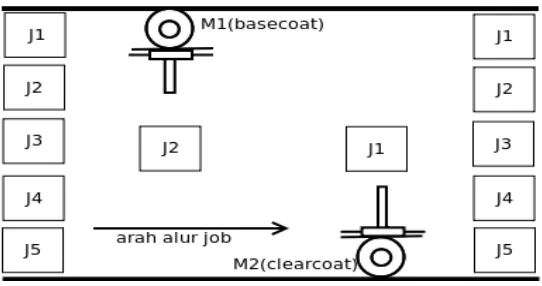
Gambar 2.5 Arsitektur Flow Shop
Pada gambar 2.5 terdapat 2 buah mesin automotive paint, yaitu M1 (basecoat) dan M2 (clearcoat). Selain itu ada 5 job/mobil yang akan dilakukan proses
pengecatan. Sehingga kelima mobil tersebut harus melewati M1 terlebih dahulu kemudian melewati M2 sesuai dengan urutan mobil yang telah ditentukan. Kelima mobil tersebut akan dicari urutannya dengan menggunakan algoritma harmony search. Kemudian akan didapat waktu yang optimal dengan urutan yang tepat.
2.4. Harmony Search Algorithm
Harmony Search Algorithm (HSA) pertama sekali dikembangkan oleh Zong Woo Geem et al pada tahun 2001. Algortima ini tergolong algoritma metaheuristik baru keefektivan dan keuntungannya telah dipraktekkan dalam berbagai macam aplikasi. Sejak pertama sekali muncul pada tahun 2001, algoritma ini telah diaplikasikan untuk memecahkan banyak permasalahan optimasi diantaranya function optimization, engineering optimization, water distribution networks, groundwater modelling,
energy-saving dispatch, truss design, vehicle routing dan lain-lain.
21
permasalahan optimasi akan menjadi solusi terbaik untuk permasalahan yang objektif dan terbatas. Kedua pemrosesan ini akan menghasilkan solusi terbaik atau optimum (Yang, 2009).
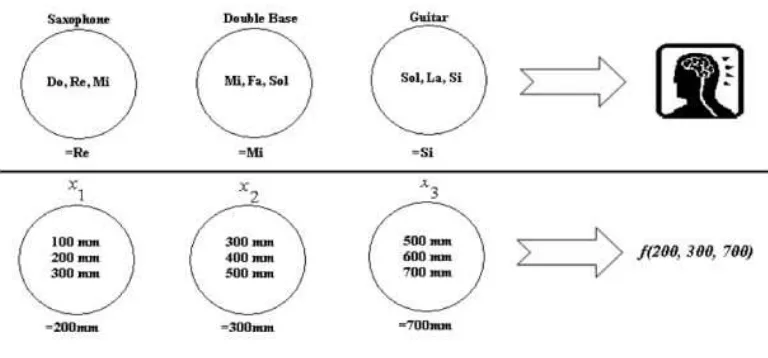
Gambar 2.6 Analogi Improvisasi Musik
Analogi antara improvisasi musik dan teknik optimasi dapat digambarkan pada gambar 2.6 :
Setiap pemain musik (saxophonist, double bassist dan guitarist) dapat dianalogikan sebagai variabel (x1, x2, x3) dan tingkat nada setiap instrumen musik (saxophone = {Do, Re, Mi}; double bass = {Mi, Fa, Sol}; dan guitar = {Sol, La, Si}) dianalogikan sebagai variabel (x1 = {100, 200, 300}; x2 = {300, 400, 500}; dan x3 = {500, 600, 700}). Jika saxophonist mengeluarkan bunyi Re, double bassist mengeluarkan bunyi Mi dan guitarist mengeluarkan bunyi Si, maka ketiganya secara bersamaan akan membuat harmoni baru yaitu (Re, Mi, Si). Jika harmoni baru ini lebih baik daripada
harmoni sebelumnya, maka harmoni baru yang akan digunakan. Demikian juga solusi vektor baru (200mm, 300mm, 700mm) akan digunakan juga jika lebih baik daripada yang sebelumnya untuk syarat nilai fungsi objektif (Chakraborty et al, 2009).
Sesuai dengan konsep di atas, HSA terdiri dari lima tahapan, yaitu :
a) Inisialisasi masalah optimasi dan parameter algoritma. b) Inisialisasi harmony memory.
d) Harmony memory update.
e) Ulangi tahap c dan d sampai kriteria berhenti terpenuhi.
2.4.1. Inisialisasi masalah optimasi dan parameter algoritma Pada tahap pertama, permasalahan optimasi ditentukan sebagai berikut :
Minimize (or Maximize) f (x)
dengan xi Є Xi, i = 1,2,...,N
dimana f (x) : suatu fungsi objektif xi : variabel keputusan ke i
Xi : himpunan variabel keputusan
N : jumlah varibel keputusan
Selanjutnya, menentukan parameter-parameter yang dibutuhkan dalam HSA, yaitu :
a) Harmony Memory Size (HMS)
HMS adalah jumlah solusi vektor dalam harmony memory.
b) Harmony Memory Considering Rate (HMCR)
HMCR merupakan nilai kontinu yang digunakan sebagai parameter improvisasi harmoni dalam HSA. Nilai dari parameter ini adalah 0 ≤ HMCR ≤ 1.
c) Pitch Adjusment Rate (PAR)
PAR merupakan nilai kontinu yang digunakan sebagai parameter improvisasi harmoni setelah kriteria HMCR terpenuhi. Nilai dari parameter ini adalah 0 ≤ PAR ≤ 1.
d) Kriteria Berhenti
23
2.4.2. Inisialisasi harmony memory
Dalam tahap yang kedua komponen dari setiap vektor pada harmony memory, yang mana ukuran HMS diinisialisasi dengan sebuah angka yang dibagikan secara acak diantara batas tertinggi dan terendah [L xi, U xi], dimana 1 ≤ i ≤ N. Ini dilakukan untuk
komponen ke i dari solusi vektor ke j yang menggunakan persamaan berikut : xj
i = Lxi + rand(0, 1) ∙ (Uxi – Lxi)
dimana :
j = 1, 2, 3, ... , HMS
rand(0, 1) : angka random antara 0 dan 1
2.4.3. Improvisasi harmoni baru
Pada tahap ini, new harmony vector x' = (x'1, x'2, x'3, x'4, .... , x'N) mempunyai tiga
bagian dasar, yaitu :
a) Memory Consideration
Penggunaan memory consideration sangat penting, ini sama halnya dengan memilih individu terbaik di dalam genetic algorithms. Memory consideration akan memastikan harmoni terbaik yang akan dibawa terakhir menjadi new harmony memory.
b) Pitch Adjustment
Pitch adjustment ditetapkan oleh sebuah pitch band-width brange dan sebuah
pitch adjusting rate rpa. Walaupun di dalam musik, pitch adjustment adalah alat
untuk mengubah frekwensi, ini cocok untuk menghubungkan solusi perbedaan yang sedikit di dalam HSA. Dalam teori, pola dapat diatur linear atau nonlinear, tetapi dalam prakteknya linear adjustment yang digunakan. Jadi dapat disimpulkan xnew = xold + brange * Є dimana xold adalah pola hidup atau
solusi dari harmony memory dan xnew adalah pola baru setelah aksi pitch
Pseudocode dari HSA adalah sebagai berikut :
begin
objective function f(x), x = (x1,x2, ... ,xd)T generate initial harmonics (real number arrays)
define pitch adjusting rate (rpa), pitch limits and bandwidth define harmony memory accepting rate (raccept)
while (t < Max number of iterations)
generate new harmonics by accepting best harmonics adjust pitch to get new harmonics (solutions)
if (rand > raccept), choose an existing harmonic randomly
else if (rand > rpa), adjust the pitch randomly within limits else generate new harmonics via random selection
end if
accept the new harmonics (solutions) if better end while
find the current best solutions end
c) Random Selection
Random selection berguna untuk memperluas keanekaragaman solusi. Walaupun pitch adjustment memiliki peran yang sama, tetapi pitch adjustment dibatasi untuk pitch adjustment lokal tertentu saja dan demikian juga untuk local search. Random selection dapat berjalan di sistem yang lebih lanjut untuk memeriksa berbagai macam solusi agar menemukan global optimal.
2.4.4. Harmony memory update
Apabila new harmony vector x' = (x'1, x'2, x'3, x'4, ... , x'N) lebih baik daripada harmoni
terburuk untuk nilai fungsi objektif pada harmony memory, maka new harmony dimasukkan ke dalam harmony memory dan demikian harmoni terburuk akan dikeluarkan dari harmony memory. Ini sebenarnya adalah tahap seleksi dimana nilai fungsi objektif dievaluasi untuk ditentukan apabila variasi baru akan dimasukkan ke dalam populasi (harmony memory).
2.4.5. Check stopping criterion
25
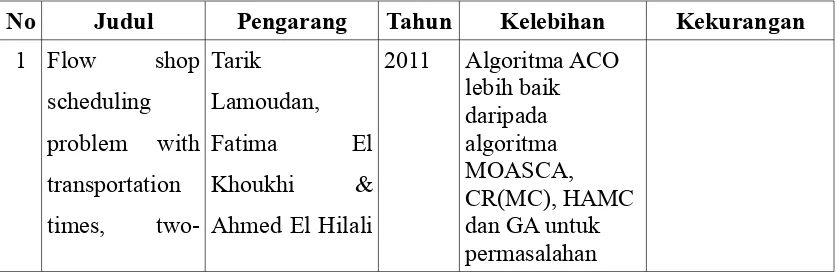
2.5. Penelitian Terdahulu
Penjadwalan flow shop dalam upaya mencari optimasi terbaik, telah banyak menyelesaikan bebagai macam permasalahan dalam kehidupan sehari-hari. Dari permasalahan yang kecil hingga permasalahan yang cukup kompleks dengan berbagai
metode dalam penyelesaiannya.
Lamoudan (2011) dalam penelitiannya menyelesaikan permasalahan penjadwalan flow shop mengenai waktu perpindahan suatu job yang terkadang masih memiliki waktu kosong ketika berpindah dari satu mesin ke mesin lainnya. Dalam hal ini Lamudan (2011) menggunakan ant colony algorithm untuk menyelesaikan permasalahannya dalam mencari waktu makespan terkecil.
Soukhal (2005) dalam penelitiannya menyelesaikan permasalahan penjadwalan flow shop dengan menggunakan polynomial-time algorithm. Permasalahan yang diteliti oleh Soukhal (2005) adalah mengenai truck pengangkut barang yang akan diantar kepada customer dengan mempertimbangkan kapasitas truck dan waktu pengangkutan.
Boukef (2007) melakukan penelitian permasalahan penjadwalan flow shop dalam hal meminimalkan jumlah harga untuk proses produksi dan proses pengiriman yang dilakukan pada farmasi obat-obatan dan industri makanan. Boukef (2007) menggunakan metode genetic algorithm untuk menyelesaikan permasalahannya.
Aulia (2011) melakukan penelitian permasalahan penjadwalan flow shop dengan kendala permutasi pada harmony search algorithm. Hasilnya algoritma ini dapat menyelesaikan permasalahan dengan baik dibandingkan dengan lower bound.
Tabel 2.1 Penelitian terdahulu
No Judul Pengarang Tahun Kelebihan Kekurangan
robots and
Berdasarkan referensi penelitian-penelitian terdahulu maka penulis meneliti mengenai penjadwalan flow shop pada proses pengecatan body mobil di pabrik pembuatan mobil dengan mempertimbangkan setiap luas permukaan body mobil yang berbeda ketika melewati lebih dari satu mesin dengan menggunakan algoritma
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
3.1. Mobil yang Digunakan
Mobil yang akan digunakan dalam penelitian ini diambil dari bebagai jenis mobil
dengan bentuk body yang berbeda-beda. Sehingga luas permukaan bodynya juga
berbeda pada setiap mobil.
Pengecatan body mobil dilakukan dengan single colour. Proses pewarnaan
dasar pada mobil dilakukan pada tahap basecoat. Pada tahap basecoat ini yang
menentukan warna body mobil. Sedangkan tahap clearcoat merupakan proses
pengecatan yang berguna untuk pelindung anti gores dan agar kelihatan lebih
mengkilap.
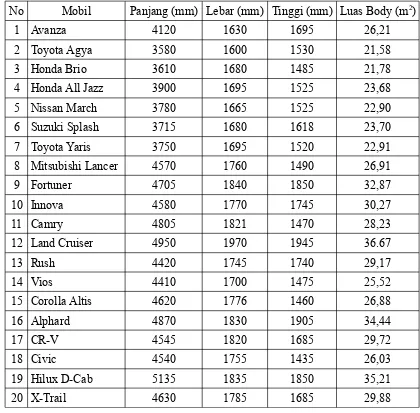
Data mobil yang digunakan penulis merupakan data ukuran dimensi mobil
panjang, lebar dan tinggi. Sehingga luas permukaan body mobil yang didapat
merupakan perkiraan luas permukaan body mobil. Untuk menghitung perkiraan luas
permukaan body mobil, setiap sisi mobil dihitung luasnya dari ukuran dimensi mobil,
Tabel 3.1 Ukuran Dimensi Mobil
No Mobil Panjang (mm) Lebar (mm) Tinggi (mm) Luas Body (m2)
1 Avanza 4120 1630 1695 26,21
2 Toyota Agya 3580 1600 1530 21,58
3 Honda Brio 3610 1680 1485 21,78
4 Honda All Jazz 3900 1695 1525 23,68
5 Nissan March 3780 1665 1525 22,90
6 Suzuki Splash 3715 1680 1618 23,70
7 Toyota Yaris 3750 1695 1520 22,91
8 Mitsubishi Lancer 4570 1760 1490 26,91
9 Fortuner 4705 1840 1850 32,87
10 Innova 4580 1770 1745 30,27
11 Camry 4805 1821 1470 28,23
12 Land Cruiser 4950 1970 1945 36.67
13 Rush 4420 1745 1740 29,17
14 Vios 4410 1700 1475 25,52
15 Corolla Altis 4620 1776 1460 26,88
16 Alphard 4870 1830 1905 34,44
17 CR-V 4545 1820 1685 29,72
18 Civic 4540 1755 1435 26,03
19 Hilux D-Cab 5135 1835 1850 35,21
20 X-Trail 4630 1785 1685 29,88
3.2. Penghitungan Waktu Pengecatan Body Mobil
Pada penelitian ini proses pengecatan body mobil yang akan diteliti adalah pada
proses pengecatan tahap akhir, yaitu basecoat dan clearcoat. Basecoat merupakan
proses pengecatan yang menentukan warna dasar body mobil. Ketebalan cat yang
akan ditentukan dalam tahap basecoat adalah 15 μm (Streitberger & Dossel 2008).
Sedangkan clearcoat merupakan tahapan pengecatan lapisan akhir dan paling atas
yang berguna sebagai pelindung anti gores dan agar tampak lebih mengkilap.
Ketebalan cat yang akan ditentukan dalam tahap clearcoat adalah 35 – 50 μm. Dalam
29
Dossel 2008).
Untuk menghitung waktu yang harus dilalui body mobil pada tahap basecoat
dan clearcoat, terlebih dahulu harus diketahui parameter standart alat cat mobil yang
biasanya digunakan dengan tenaga robot. Menurut Ansdell dalam bukunya
Automotive Paints, parameter standart yang digunakan dalam penelitian ini adalah :
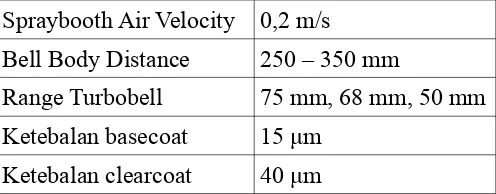
Tabel 3.2 Parameter Standart Pengecatan
Spraybooth Air Velocity 0,2 m/s
Bell Body Distance 250 – 350 mm
Range Turbobell 75 mm, 68 mm, 50 mm
Ketebalan basecoat 15 μm
Ketebalan clearcoat 40 μm
Spraybooth Air Velocity adalah kecepatan turbobell ketika menyemprotkan cat
ke body mobil. Bell body distance adalah jarak turbobell dari body mobil yang akan
dicat. Sedangkan Range turbobell adalah cakupan luas permukaan cat yang akan
mengenai body mobil ketika proses pengecatan. Dalam penelitian ini penulis
menggunakan bell body distance dengan ukuran 250 mm dan range turbobell 50 mm.
Dari tabel 3.2, untuk menghitung waktu pada tahap basecoat yang terlebih
dahulu dihitung adalah waktu yang dibutuhkan turbobell untuk mengecat body mobil
pada ukuran 50 mm. Setelah diketuhui waktu pada setiap 50 mm, kemudian dihitung
waktu dari keseluruan luas permukaan body mobil.
Untuk menghitung waktu yang dibutuhkan setiap 50 mm digunakan rumus
kecepatan yaitu v = s / t. Sehingga dihasilkan waktu 1,25 detik dengan v = 0,2 m/s dan
s = 250 mm. Jika dikonversi ke dalam meter, maka range setiap 1 meter
membutuhkan waktu 25 detik pada tahapan basecoat. Karena ketebalan clearcoat 2,7
kali lebih tebal dari basecoat, maka waktu tahapan clearcoat adalah 2,7 kali dari
tahapan basecoat.
Pada tahapan basecoat, turbobell yang digunakan berjumlah satu. Sedangkan
pada tahapan clearcoat, turbobell yang digunakan berjumlah tiga. Sehingga diperoleh
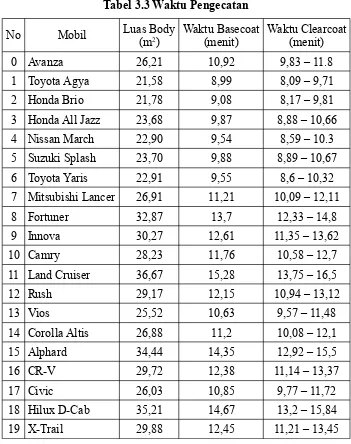
pada tabel 3.3 berikut ini :
0 Avanza 26,21 10,92 9,83 – 11.8
1 Toyota Agya 21,58 8,99 8,09 – 9,71
2 Honda Brio 21,78 9,08 8,17 – 9,81
3 Honda All Jazz 23,68 9,87 8,88 – 10,66
4 Nissan March 22,90 9,54 8,59 – 10.3
5 Suzuki Splash 23,70 9,88 8,89 – 10,67
6 Toyota Yaris 22,91 9,55 8,6 – 10,32
7 Mitsubishi Lancer 26,91 11,21 10,09 – 12,11
8 Fortuner 32,87 13,7 12,33 – 14,8
9 Innova 30,27 12,61 11,35 – 13,62
10 Camry 28,23 11,76 10,58 – 12,7
11 Land Cruiser 36,67 15,28 13,75 – 16,5
12 Rush 29,17 12,15 10,94 – 13,12
13 Vios 25,52 10,63 9,57 – 11,48
14 Corolla Altis 26,88 11,2 10,08 – 12,1
15 Alphard 34,44 14,35 12,92 – 15,5
16 CR-V 29,72 12,38 11,14 – 13,37
17 Civic 26,03 10,85 9,77 – 11,72
18 Hilux D-Cab 35,21 14,67 13,2 – 15,84
19 X-Trail 29,88 12,45 11,21 – 13,45
3.3. Penerapan Algoritma
Dalam penelitian ini akan menyelesaikan permasalahan penjadwalan flow shop pada
proses pengecatan body mobil dengan menggunakan algoritma harmony search. Pada
penelitian terdahulu, algoritma harmony search sudah ada digunakan dalam
menyelesaikan permasalahan penjadwalan flow shop dan hasilnya cukup efisien.
31
pembangkitan nilai awal secara random dan dilanjutkan dengan proses improvisasi.
Improvisasi merupakan proses inti dari algoritma harmony search dengan cara
menyesuaikan vektor tetangganya sehingga terbentuk vektor solusi yang baru. Seperti
permainan musik ketika mencari harmoni yang lebih baik untuk mendapatkan
harmoni musik yang tepat, sebagaimana inspirasi dari algoritma ini dibuat.
Penerapan algoritma harmony search dalam proses penjadwalan flow shop
dapat dilihat dari flowchart berikut ini :
3.3.1. Input parameter
Untuk menyelesaikan permasalahan penjadwalan flow shop sehingga mendapatkan
hasil yang optimum, maka dalam penerapan algoritma ini yang dilakukan pertama
sekali adalah penginputan parameter-parameter yang dibutuhkan, yaitu :
a) Harmony Memory Size (HMS)
HMS merupakan jumlah solusi vektor dalam harmoni memori.
b) Jumlah Job
Jumlah job dalam penelitian ini adalah jumlah mobil yang akan digunakan
dalam penjadwalan flow shop.
c) Harmony Memory Consideration Rate (HMCR)
HMCR merupakan nilai kontinu yang digunakan sebagai parameter
improvisasi harmoni dalam HSA. Nilai dari parameter ini adalah 0 ≤ HMCR ≤
1. Dalam penelitian ini digunakan HMCR dengan nilai 0,9.
d) Pitch Adjusment Rate (PAR)
PAR merupakan nilai kontinu yang digunakan sebagai parameter improvisasi
harmoni setelah kriteria HMCR terpenuhi. Nilai dari parameter ini adalah 0 ≤
PAR ≤ 1. Dalam penelitian ini digunakan PAR dengan nilai 0,3.
e) Kriteria Berhenti
Kriteria berhenti merupakan nilai yang digunakan untuk menghentikan
pengulangan improvisasi harmoni baru.
3.3.2. Inisialisasi harmony memory
Dalam tahap inisialisasi Harmony Memory, vektor-vektor solusi akan mengisi
harmoni memori sesuai dengan jumlah HMS. Vektor solusi dihasilkan dari variabel
keputusan yang dibangkitan secara random. Vektor solusi yang terbentuk secara
random merupakan urutan job dalam flow shop. Kemudian masing-masing vektor
solusi akan dihitung nilai maskpannya. Sehingga akan menghasilkan vektor solusi
33
Berikut ini merupakan contoh data yang akan diselesaikan berdasarkan
permasalahan flow shop, yaitu :
Tabel 3.4 Contoh Waktu Flow Shop Scheduling
Mesin/Mobil 1 2 3 4 5 6 7
1 1 3 5 2 4 5 3
2 2 4 1 3 5 4 2
Dari data pada tabel 3.4, jumlah mesin adalah 2 dan jumlah mobil adalah 7.
Sehingga variabel keputusan yang tebentuk adalah
Xi = {1,2,3,4,5,6,7}
Setelah dihasilkan variabel keputusan Xi, selanjutnya tentukan jumlah HMS
yang akan dibentuk untuk menampung jumlah vektor solusi dalam HM. Kemudian
dilakukan pembangkitan vektor solusi secara random dan dihitung makespan dari
masing-masing vektor solusi.
3.3.3. Improvisasi new harmony
Tahap improvisasi merupakan tahapan inti dari algoritma harmony search yang akan
menghasilkan solusi vektor baru serta objective function masing-masing vektor solusi.
Kemudian nilai dari objective function tersebut akan dibandingkan dengan objective
function yang terdapat pada HMS. Jika objective function dari hasil improvisasi
merupakan yang terbaik, maka vektor solusi yang terdapat pada HMS akan digantikan
dengan yang baru.
Untuk melakukan improvisasi ada aturan yang harus dipenuhi dalam proses
penyelesaiannya, yaitu :
a) Harmony Memory Consideration
Di dalam harmony memory consideration ada beberapa proses yang harus
• Membangkitkan bilangan acak secara random antara 0 dan 1.
• Bilangan acak yang diperoleh kemudian disesuaikan dengan HMCR yang sudah ditentukan nilainya.
• Jika bilangan acak tersebut lebih besar dari HMCR maka dibangkitkan variabel keputusan yang baru dari variabel keputusan Xi.
• Jika bilangan acak tersebut lebih kecil dari HMCR maka dibangkitkan variabel keputusan baru yang sifatnya sementara dari variabel keputusan
Xi. Yang kemudian akan disesuaikan dengan aturan pitch adjusment.
Selanjutnya variabel keputusan Xi yang diperoleh dari harmony memory
consideration akan disesuaikan dengan aturan pitch adjustment.
b) Pitch Adjustment
Pitch adjusment merupakan aturan yang harus dilalui setelah aturan harmony
memory consideration terpenuhi. Proses yang harus dilalui di dalam pitch
adjusment adalah sebagai berikut :
• Membangkitkan bilangan acak secara random anatara 0 dan 1.
• Bilangan acak yang diperoleh kemudian disesuaikan dengan PAR yang sudah ditentukan nilainya.
• Jika bilangan acak tersebut lebih besar dari PAR maka variabel keputusan yang diperoleh dari tahapan harmony memory consideration dipertahankan
sebagai variabel keputusan yang baru.
• Jika bilangan acak tersebut lebih kecil dari PAR maka variabel keputusan yang diperoleh dari tahapan harmony memory consideration disesuaikan
dengan variabel tetangganya.
Berikut ini merupakan contoh proses improvisasi yang terjadi di dalam
algoritma harmony search.
• Iterasi 1
Bilangan acak yang dibangkitikan misalkan a1 = 0,432. Kemudian bilangan
35
variabel keputusan dipilih secara random. Misalkan yang dipilih x1' = 2.
Selanjutnya bangkitkan bilangan acak yang akan dilakukan penyesuaian
dengan PAR = 0,3. Misalkan bilangan acak yang dibangkitkan adalah a2 =
0,512. Karena a2 > PAR, maka variabel keputusan x1' = 2 tetap
dipertahankan.
• Iterasi 2
Bilangan acak yang dibangkitkan misalkan a1 = 0,925. Kemudian bilangan
acak tersebut disesuaikan dengan HMCR = 0,9. Karena a1 > HMCR, maka
variabel keputusan dipilih secara random dari X1. Misalkan yang dipilih x1'
= 5.
• Iterasi 3
Bilangan acak yang dibangkitkan misalkan a1 = 0,276. Kemudian bilangan
acak tersebut disesuaikan dengan HMCR = 0,9. Karena a1 < HMCR, maka
variabel keputusan dipilih secara random. Misalkan yang dipilih x1' = 3.
Selanjutnya bangkitkan bilangan acak yang akan dilakukan penyesuaian
dengan PAR = 0,3. Misalkan bilangan acak yang dibangkitkan adalah a2 =
0,114. Karena a2 < PAR, maka variabel keputusan x1' = 3 dilakukan
penyesuaian dengan variabel disebelahnya, yaitu x2' = 4.
• Iterasi 4
Bilangan acak yang dibangkitkan misalkan a1 = 0,456. Kemudian bilangan
acak tersebut disesuaikan dengan HMCR = 0,9. Karena a1 < HMCR, maka
variabel keputusan dipilih secara random. Misalkan yang dipilih x1' = 6.
Selanjutnya bangkitkan bilangan acak yang akan dilakukan penyesuaian
dengan PAR = 0,3. Misalkan bilangan acak yang dibangkitkan adalah a2 =
0,212. Karena a2 < PAR, maka variabel keputusan x1' = 6 dilakukan
penyesuaian dengan variabel disebelahnya, yaitu x2' = 7.
• Iterasi 5
Bilangan acak yang dibangkitkan misalkan a1 = 0,941. Kemudian bilangan
variabel keputusan dipilih secara random dari X1. Misalkan yang dipilih x1'
= 6.
• Iterasi 6
Bilangan acak yang dibangkitikan misalkan a1 = 0,672. Kemudian bilangan
acak tersebut disesuaikan dengan HMCR = 0,9. Karena a1 < HMCR, maka
variabel keputusan dipilih secara random. Misalkan yang dipilih x1' = 1.
Selanjutnya bangkitkan bilangan acak yang akan dilakukan penyesuaian
dengan PAR = 0,3. Misalkan bilangan acak yang dibangkitkan adalah a2 =
0,322. Karena a2 > PAR, maka variabel keputusan x1' = 1 tetap
dipertahankan.
• Iterasi 7
Bilangan acak yang dibangkitikan misalkan a1 = 0,731. Kemudian bilangan
acak tersebut disesuaikan dengan HMCR = 0,9. Karena a1 < HMCR, maka
variabel keputusan dipilih secara random. Misalkan yang dipilih x1' = 3.
Selanjutnya bangkitkan bilangan acak yang akan dilakukan penyesuaian
dengan PAR = 0,3. Misalkan bilangan acak yang dibangkitkan adalah a2 =
0,843. Karena a2 > PAR, maka variabel keputusan x1' = 3 tetap
dipertahankan.
Dari proses improvisasi di atas maka diperoleh solusi vektor yang baru, yaitu :
X = [2 5 4 7 6 1 3]
Selanjutnya dari urutan mobil tersebut, maka akan dihitung fungsi objektifnya untuk
mengetahui waktunya.
3.3.4. Fungsi objektif
Fungsi objektif pada penelitian ini menggunakan makespan, yaitu jangka waktu
penyelesaian suatu job yang merupakan penjumlahan dari seluruh waktu proses suatu
37
terbaik dan memastikan job dari awal sampai akhir terselesaikan. makespan dihitung
dengan menggunakan persamaan berikut ini :
Cmax = max{Ci ,, i = 1,2,...,n}
Untuk menghitung makespan akan dijabarkan pada tabel 3.5 berikut ini :
Tabel 3.5 Penghitungan makespan
Dari tabel 3.5, di kolom mobil sudah tersusun urutan mobil yang akan diproses
pada masing-masing mesin 1 dan mesin 2. Pada urutan mobil yang ke-1 (mobil 2),
mula-mula waktu mulainya 0. Karena setiap mobil pada urutan ke-1 pasti dimulai dari
menit ke 0. Untuk mengetahui waktu mulai pada urutan mobil yang ke-2 (mobil 5),
yaitu durasi waktu dan waktu mulai pada urutan mobil ke-1 (mobil 2) dijumlahkan.
Sehingga hasil jumlah tersebut merupakan waktu mulai dari urutan mobil ke-2 (mobil
5). Begitu seterusnya sampai mobil yang terakhir. Untuk mengisi waktu akhir, durasi
waktu dan waktu mulai dijumlahkan pada setiap mobil.
Untuk mesin 2, waktu mulai pada urutan mobil ke-1 (mobil 2) diambil dari
urutan mobil selanjutnya, didapat dari hasil perbandingan antara waktu akhir urutan
mobil ke-1 (mobil 2) pada mesin 2 (j) dengan waktu akhir urutan mobil ke-2 (mobil 5)
(i + 1). Yang diambil adalah waktu akhir yang paling besar. Sehingga didapat nilai
makespan adalah urutan terakhir (mobil 3) pada urutan mobil ke-7 di mesin 2, yaitu
24.
3.3.5. Harmony memory update
Setelah proses improvisasi selesai maka akan didapat urutan mobil baru. Kemudian
dari urutan mobil tersebut dihitung makespan. Setelah diperoleh nilai makespan,
kemudian nilai makespan tersebut dibandingkan dengan nilai makespan yang terdapat
pada HM.
Jika makespan yang diperoleh pada tahapan improvisasi lebih kecil dari
makespan yang terdapat pada HM, maka urutan mobil dan nilai makespan pada HM
akan diganti dengan urutan mobil dan makespan yang baru. Akan tetapi jika
makespan yang diperoleh pada tahapan improvisasi tidak lebih kecil dari makespan
yang terdapat pada HM, maka urutan mobil dan makespan pada HM akan tetap
dipertahankan.
3.3.6. Kriteria berhenti
Kriteria berhenti merupakan kondisi dimana proses improvisasi akan berhenti jika
memenuhi ketetapan kriteria berhenti. Akan tetapi jika ketetapan kriteria berhenti
belum terpenuhi, maka proses improvisasi terus dilakukan berulang-ulang sampai
memenuhi kriteria berhenti.
3.4. Analisis Sistem
Analisis sistem merupakan tahapan untuk menjelaskan sistem yang akan
dikembangkan. Dalam analisis sistem akan dipaparkan bagaimana proses sistem
tersebut berjalan.
3.4.1. System requirement
Pada penelitian ini mengidentifikasi masalah penjadwalan flow shop dalam proses
39
berbeda. Dengan menggunakan algoritma harmony search diharapkan dapat
menghasilkan urutan mobil yang ideal dengan makespan terkecil sehingga
memberikan solusi dalam industri mobil.
Dalam menyelesaikan penelitian ini, terlebih dahulu harus memiliki data waktu
pada setiap body mobil ketika body mobil dilakukan proses pengecatan pada tahapan
basecoat dan clearcoat. Data waktu ini akan disimpan dalam file txt.
Sistem ini akan meminta user untuk memasukkan nama file txt yang sudah
berisi data waktu untuk diolah. Selanjutnya sistem akan meminta juga berapa jumlah
improvisasi yang akan dilakukan untuk mengolah data tersebut. Setelah data diolah,
sistem akan menampilkan urutan mobil dan makespan terkecil.
3.4.2. Process modelling
Untuk menggambarkan proses dan aktivitas sistem digunakan Data Flow Diagram
(DFD). DFD adalah teknik grafis yang menggambarkan aliran informasi dan
transformasi yang diplikasikan pada saat bergerak dari input menjadi output. DFD
untuk menyelesaikan penjadwalan flow shop dalam sistem ini adalah sebagai berikut :
a) Context Diagram
Context diagram adalah DFD tingkat atas yang paling tidak detail dari sebuah
sistem yang menggunakan aliran-aliran data ke dalam dan ke luar sistem serta
ke dalam dan ke luar entity eksternal. Context diagram pada sistem ini dapat
digambarkan pada gambar 3.2 :
Gambar 3.2 Context Diagram Sistem Penjadwalan Flow Shop
Pada context diagram terdiri dari entity user, yang memberikan input data dan
hasilnya kepada user.
b) DFD Level n
DFD level n digunakan untuk menggambarkan diagram fisik maupun diagram
logis. Dimana DFD level n merupakan hasil pengembangan dari context
diagram ke dalam komponen yang lebih detail sehingga disebut dengan
top-down partitioning.
Gambar 3.3 DFD Level 0
DFD pada gambar 3.3 menggambarkan pemrosesan data txt yang diinput dan
divalidasi. Setelah divalidasi, data diproses untuk menghitung makespan dan
mencari urutan mobil. Dari DFD level 0 di atas dapat dikembangkan lagi
menjadi DFD level 1 pada proses penghitunga makespan dan mencari urutan
41
Gambar 3.4 DFD Level 1
DFD level 1 pada gambar 3.4 menggambarkan dimana sistem memproses
dalam menghitung makespan dan pencarian urutan mobil yang optimal. Untuk
yang pertama adalah membangkitkan urutan mobil sebanyak HMS. Kemudian
dihitung makespan dari masing-masing HM. Selanjutnya membangkitkan
urutan mobil untuk mencarai solusi baru sesuai dengan ketentuan HMCR dan
PAR. Setelah dibangkitkan, dihitung makespan untuk mencari makespan yang
terbaik. makespan solusi baru kemudian diupdate ke HMS jika makespan
solusi baru lebih baik daripada makespan yang lama.
3.4.3. Antarmuka sistem
Antarmuka sistem adalah tampilan sistem yang dirancang untuk memberikan
kemudahan bagi pengguna dalam melakukan penelitian. Antarmuka dalam penelitian
ini dirancang secara tekstual.
1) Input File
Pertama kali pengguna akan diminta untuk memasukkan nama file dalam
diolah oleh sistem seperti pada gambar 3.5 berikut ini :
Gambar 3.5 Tampilan Memasukkan Nama File
Jika pengguna memasukkan nama file yang tidak ada dalam direktori atau
pengguna memasukkan nama file yang tidak sesuai dengan yang diminta,
maka sistem akan menampilkan informasi bahwa file yang dimasukkan tidak
ditemukan seperti gambar 3.6 berikut ini :