Rudi Masrul : Analisis Penggunaan Power System Stabilizer (PSS) Dalam Perbaikan Stabilitas Dinamik Sistem Tenaga Listrik Multimesin, 2009.
USU Repository © 2009
TUGAS AKHIR
ANALISIS PENGGUNAAN POWER SYSTEM STABILIZER (PSS)
DALAM PERBAIKAN STABILITAS DINAMIK SISTEM
TENAGA LISTRIK MULTIMESIN
Diajukan untuk memenuhi salah satu persyaratan dalam meyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro Oleh:
NIM: 040402032 Rudi Masrul
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSTAS SUMATERA UTARA
MEDAN
i
ABSTRAK
Tugas akhir ini menganalisis perbaikan stabilitas dinamis sistem tenaga listrik yang dilakukan dengan pemasangan Power System Stabilizer (PSS) yang diterapkan pada sistem eksitasi. Model sistem yang digunakan ialah sistem tenaga listrik multimesin, yang terdiri dari tiga generator atau pembangkit.
Analisis dan simulasi ini diawali dengan pembuatan model matematik sistem tenaga listrik tanpa pemasangan Power System Stabilizer (PSS) ke dalam persamaan variabel keadaan, dan kemudian dibentuk model blok diagram yang merupakan plant sistem, yang masukannya dari perubahan kecepatan rotor, dan keluaran dari Power System Stabilizer (PSS) kemudian masuk ke eksitasi. Kemampuan sistem tenaga
listrik dengan pemasangan Power System Stabilizer (PSS) pada sisi pembangkitan dalam meredam osilasi lebih baik jika dibandingkan tanpa pemasangan Power System Stabilizer.
Model sistem tenaga listrik dibentuk ke dalam persamaan differensial linier yang kemudian dibentuk persamaan variabel keadaan dan penerapan Power System Stabilizer (PSS) yang diterapkan ke masukan eksitasi dapat digunakan untuk analisa
ii
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat ALLAH SWT atas rahmat dan karunia yang dilimpahkan sehingga dapat menyelesaikan Tugas Akhir ini. Adapun Tugas Akhir ini dibuat untuk memenuhi syarat kesarjanaan di Departemen Teknik Elektro, Fakultas Teknik Universitas Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada yang teristimewa yaitu ayahanda, ibunda, dan kakak-kakakku serta abang-abangku tercinta yang merupakan bagian hidup penulis yang senantiasa mendukung dan mendoakan dari sejak penulis lahir hingga sekarang.
Selama masa perkuliahan sampai masa penyelesaian tugas akhir ini, penulis banyak memperoleh bimbingan dan dukungan dari berbagai pihak. Untuk itu, dengan setulus hati penulis menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Bapak Ir.Surya Tarmizi Kasim, Msi., selaku dosen Pembimbing Tugas Akhir, atas segala bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir.Mustafrind Lubis, selaku dosen Wali penulis, atas bimbingan dan arahannya dalam menyelesaikan perkuliahan.
iii
4. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh Karyawan di Jurusan Teknik Elektro Fakultas Teknik Elektro USU.
5. Teman-teman angkatan ’04, wahyu, izal, kifli, anhar, franklin, bayu, lutfi, nurul, idris, tosa, aci, salman, mufi, ronal sibuea, chandra dan lain-lain yang tak dapat penulis sebutkan satu persatu.
6. Asisten Laboratorium Konversi Energi Listrik made, jukki, ai, eko, ronal dan kurniadi yang telah banyak memberikan dukungan kepada penulis dalam penyelesaian tugas akhir ini.
7. Senior – Seniorku dan Junior-Juniorku yang telah membantu dalam penyelesaian tugas akhir ini.
8. Teman-teman penulis di lorong IX, Tri-B (Pendi, Mami, dan ….), Ewin, Nazri, B’ Eddy, Ari, Juni (Adikku), Iwan no 4, Iwan no 6, Arief, Taufik, Alis (Agus), Poetra, Andi (ILKOM), B’ Izal, Eko, yang telah banyak membantu dan memberikan banyak inspirasi pada penulis.
9. Teman-teman penulis di Mechanical Industry, Inal, Rahmat, B’Zoel, wahyu, Afgan (Frenklyn) dan semuanya yang banyak menemani penulis untuk Browsing.
iv
Akhir kata, tugas akhir ini masih jauh dari kesempurnaan, masih banyak kesalahan dan kekurangan, namun penulis tetap berharap semoga tugas akhir ini bisa bermanfaat dan memberikan inspirasi bagi pengembangan selanjutnya.
Medan, Januari 2009
Penulis
v
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xii
DAFTAR NOTASI ... xiii
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan dan Manfaat Tugas Akhir ... 3
1.3 Batasan Masalah ... 3
1.4 Metode Penulisan ... 4
1.5 Sistematika Penulisan ... 5
BAB II OPERASI DAN DINAMIKA SISTEM TENAGA LISTRIK 2.1 Dinamika Sistem Tenaga Listrik ... 7
2.2 Kestabilan Sistem Tenaga Listrik ... 8
2.2.1 Kestabilan Steady State ... 9
vi
2.3 Operasi Sistem Tenaga ... 10
2.4 Permasalahan Dinamika Sistem Tenaga... 12
2.5 Kestabilan Transfer Daya Generator ... 15
2.6 Load Frequency Control ... 18
2.7 Flexible AC Transmision System (FACTS) ... 19
2.8 Subsynchronous Resonance (SSR) ... 21
BAB III STABILITAS SISTEM TENAGA LISTRIK 3.1 Umum ... 23
3.2 Pemodelan Sistem Tenaga Listrik ... 24
3.2.1 Model Sistem Tenaga Listrik Multimesin ... 24
3.2.2 Model Linear Sistem ... 25
3.2.3 Jaringan Transmisi Tenaga Listrik ... 25
3.2.4 Model Linear Dinamika Sebuah Mesin Sinkron ... 26
3.2.5 Masalah Stabilitas Sistem Generator Sinkron ... 35
3.2.6 Kontribusi Torsi Redaman dan Torsi Sinkronisasi Dari Loop Mekanik dan Loop Elektrik ... 38
3.3 Model Dinamika Multimesin ... 44
vii
3.3.2 Pemodelan Sistem Eksitasi ... 49
3.3.3 Pemodelan Turbin dan Sistem Pengaturannya ... 49
3.4 Power System Stabilizer ... 52
3.4.1 Konsep Dasar PSS ... 52
3.4.2 Komponen PSS ... 52
3.5 State Space sistem Tenaga Listrik ... 55
3.5.1 Sifat Eigen Pada Besaran Matriks ... 56
3.5.2 Eigenvalue dan Stabilitas ... 57
BAB IV SIMULASI DAN ANALISIS 4.1 Algoritma ... 58
4.1.1 Data ... 60
4.1.2. Aliran Daya (Loadflow) ... 62
4.1.3. Reduksi Matriks Admitansi Jaring ... 62
4.1.4. Pemodelan Sistem ... 63
4.2. Hasil Simulasi dan Analisis ... 63
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 78
viii
DAFTAR PUSTAKA ... 79
LAMPIRAN A ... 81
LAMPIRAN B ... 85
LAMPIRAN C ... 88
ix
DAFTAR GAMBAR
Gambar 2.1 Diagram Transfer Daya ... 16
Gambar 2.2 Skema TCS ... 21
Gambar 3.1 Diagram Sebuah Mesin Pada Sistem Multimesin ... 26
Gambar 3.2 Dinamika Dasar Generator Sinkron ... 26
Gambar 3.3 Diagram Blok Model Dinamika Sebuah Generator Sinkron ... 32
Gambar 3.4 Dinamika Model Reaksi Jangkar Terhadap Perubahan Sudut ... 33
Gambar 3.5 Diagram Mode Tegangan ... 34
Gambar 3.6 Model Linear Sebuah Generator Sinkron ... 35
Gambar 3.7 Blok Diagram Model Dinamika Gerak Rotor dengan Memasukkan Efek Loop Reaktif ... 36
Gambar 3.8 Blok Diagram Model Loop Mekanik Dinamika Mesin Sinkron ... 38
Gambar 3.9 Diagram Phasa Torsi Sinkronisasi dan Torsi Redaman ... 39
Gambar 3.10 Diagram Blok Komponen Torsi Yang Dihasilkan Oleh Komponen Reaktif ... 40
Gambar 3.11 Blok Diagram Sebuah Mesin Sinkron Dengan PSS ... 44
Gambar 3.12 Diagram Sistem Generator Sinkron Dalam Model Multimesin ... 45
x
Gambar 3.14 Model Linear Turbin Air dan Pengaturannya ... 50
Gambar 3.15 Model Linear Turbin Uap dan Pengaturannya ... 51
Gambar 3.16 Sebuah Sistem PSS pada Generator ke-I ... 53
Gambar 3.17 PSS Dalam Bentuk Model Linear ... 53
Gambar 4.1 Flowchart Penyelesaian Tugas Akhir ... 59
Gambar 4.2 Single Line Diagram Sistem Tenaga Listrik ... 62
Gambar 4.3 Flowchart Proses Reduksi Matriks Jaringan ... 63
Gambar 4.4 Respon Tegangan Generator 1 ... 70
Gambar 4.5 Respon Frekuensi Generator 1 ... 71
Gambar 4.6 Respon Tegangan Generator 2 ... 71
Gambar 4.7 Respon Frekuensi Generator 2 ... 72
Gambar 4.8 Respon Tegangan Generator 3 ... 72
Gambar 4.9 Respon Frekuensi Generator 3 ... 73
Gambar 4.10 Respon Tegangan Generator 1 dengan Penambahan Beban ... 74
Gambar 4.11 Respon Frekuensi Generator 1 dengan Penambahan Beban ... 75
Gambar 4.12 Respon Tegangan Generator 2 dengan Penambahan Beban ... 75
xi
Gambar 4.14 Respon Tegangan Generator 3 dengan Penambahan Beban ... 76
Gambar 4.15 Respon Frekuensi Generator 3 dengan Penambahan Beban ... 77
Gambar A-1, Matriks YBUS dari sistem transmisi dan representasi generator dengan
xii
DAFTAR TABEL
Tabel 1. Parameter Dinamik Mesin ... 60
Tabel 2. Parameter Dinamik Mesin ... 60
Tabel 3. Data Beban dan Pembangkitan ... 61
Tabel 4. Data Saluran Transmisi ... 61
Tabel 5. Tegangan dan Sudut Tiap-tiap Bus Hasil Aliran Daya ... 64
Tabel 6. Parameter Interkoneksi ... 64
Tabel 7. Nilai eigen sebelum dipasang PSS ... 67
Tabel 8. Parameter PSS ... 68
Tabel 9. Nilai eigen sistem setelah digunakan PSS ... 68
Tabel 10. Hasil Analisa Sebelum Diberi Gangguan ... 73
xiii
DAFTAR NOTASI A = Matriks keadaan sistem (Variabel keadaan sistem)
i = Perubahan sudut rotor mesin ke-i
D = Konstanta redaman
E’q = Perubahan tegangan generator
Kg = Konstanta gain governor
KA = Konstanta gain amplifier
Ki,j = Parameter Interkoneksi (i,j=1,2,3,….)
M = Konstanta inersia Mesin
R = Konstanta gain regulator
Tm = Perubahan Torsi Mekanik/Prime Mover
T’do = Konstanta waktu medan pada open circuit
Tg = Konstanta waktu Governor
Tt = Konstanta waktu Turbin
TA = Konstanta waktu Amplifier
VFD = Perubahan tegangan medan
VF = Perubahan Tegangan ke arah eksitasi setelah di filter
xiv
Y = Perubahan level Katup Turbin
VA = Perubahn tegangan ke arah Eksitasi setelah dikuatkan
1
BAB I PENDAHULUAN
1.1 Latar Belakang
Pada perencanaan dan operasi sistem tenaga listrik, kestabilan sistem adalah hal yang sangat penting. Pada sistem pengaturan modern, eksitasi memegang peranan penting dalam mengendalikan kestabilan suatu pembangkit karena apabila terjadi fluktuasi beban maka eksitasi sebagai pengendali akan berfungsi mengontrol keluaran generator seperti tegangan, dan faktor daya dengan cara mengatur kembali besaran-besaran input guna mencapai titik keseimbangan baru. Bila arus eksitasi naik maka daya reaktif yang disalurkan generator ke sistem akan naik sebaliknya bila turun maka daya reaktif yang disalurkan akan berkurang. Jika arus eksitasi yang diberikan terlalu kecil, aliran daya reaktif akan berbalik dari sistem menuju ke generator sehingga generator menyerap daya reaktif dari sistem. Keadaan ini sangat berbahaya karena akan menyebabkan pemanasan berlebihan pada stator.
Pada dasarnya, kestabilan sistem tenaga listrik terbagi dalam kestabilan steady state dan kestabilan transient. Kestabilan transient berhubungan dengan
gangguan besar yang terjadi secara tiba-tiba, seperti gangguan hubung singkat, pemutusan saluran, pemindahan atau pemutusan beban. Sedangkan kestabilan steady state berhubungan dengan kemampuan sistem tenaga listrik untuk kembali pada
kondisi operating point-nya setelah terjadi gangguan kecil.
2
melalui cara-cara berbeda, tergantung pada sifat dari sistem, kondisi operasi serta pada sifat dan lokasi yang memulai gangguan. Ketidakstabilan sistem yang diwujudkan dalan bentuk tegangan di beberapa bus turun jauh di bawah kondisi normal dan memungkinkan terjadi gagal tegangan, maka peristiwa tersebut bisa dikatakan atau merupakan fenomena ketidakstabilan tegangan. Persoalan stabilitas sangat bergantung pada kemampuan sistem mempertahankan kondisi tegangan mantap pada seluruh bus, baik dalam keadaan operasi normal maupun setelah terjadi gangguan. Suatu sistem dikatakan dalam kondisi tegangan tidak stabil, bila terjadi perubahan pada sistem di luar prakiraan.
Oleh karena itu yang akan dibahas dalam tugas akhir ini nantinya tentang Power System Stabilizer dalam pengaturan eksitasi untuk memperbaiki respon
stabilitas dinamik sistem tenaga listrik.
3
1.2 Tujuan dan Manfaat Tugas Akhir
Adapun tujuan utama penulisan tugas akhir ini adalah:
1. Memberikan penjelasan dan pengetahuan tentang Power System Stabilizer.
2. Memberikan penjelasan mengenai pengaturan eksitasi sistem pembangkitan tenaga listrik untuk memperbaiki respon stabilitas dinamik yang akan berpengaruh dalam sistem interkoneksi.
3. Membandingkan sistem tenaga listrik yang memakai Power System Stabilizer dengan yang tidak menggunakan Power System Stabilizer, serta membuktikan bahwa Power System Stabilizer dengan penalaan yang sesuai dapat memperbaiki atau mempercepat respon kestabilan dinamik sistem tenaga listrik.
4. Manfaat penulisan tugas akhir ini adalah menambah pengetahuan dan wawasan penulis dan pembaca mengenai pengaturan sistem eksitasi pembangkit dalam memperbaiki respon stabilitas dinamik sistem tenaga listrik yang sangat erat sekali hubungannya pada sistem interkoneksi.
1.3 Batasan Masalah
4
1. Tidak membahas tentang studi aliran daya secara mendalam. 2. Tidak mmembahas tentang kestabilan transien.
3. Membahas tentang Power System Stabilizer dalam pengaturan eksitasi pembangkitan tenaga listrik untuk memperbaiki respon stabilitas tenaga listrik multimesin.
4. Dalam membuat model dinamik sistem tenaga listrik multimesin dilakukan asumsi-asumsi sebagai berikut:
a. Sistem dianggap linear b. Tahanan stator diabaikan
c. Unit-unit generator dalam satu pembangkit dianggap identik. d. Ayunan antar unit generator dalam satu pembangkit
diabaikan.
e. Beban sebagai beban statik
f. Kejenuhan inti pada generator diabaikan
5. Simulasi yang dilakukan terdiri dari tiga pembangkit tenaga listrik.
1.4 Metode Penulisan
Metode penulisan yang digunakan penulis dalam tugas akhir ini yaiutu:
5
2. Studi bimbingan yaitu dengan melakukan diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU dan sesama Mahasiswa.
1.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika pembahasan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, manfaat penulisan, batasan masalah, metode dan sistematika penulisan.
BAB II : OPERASI DAN DINAMIKA SISTEM TENAGA LISTRIK
Bab ini menjelaskan gambaran secara umum mengenai permasalahan kestabilan dinamik, pengoperasian dan kontrol sistem tenaga listrik.
BAB III: PEMODELAN SISTEM TENAGA LISTRIK
6
BAB IV: SIMULASI DAN ANALISIS
Bab ini membahas tentang simulasi sistem dan analisis hasil simulasi.
BAB V: KESIMPULAN DAN SARAN
7
BAB II
OPERASI DAN DINAMIKA SISTEM TENAGA LISTRIK
2.1 Dinamika Sistem Tenaga Listrik
Sistem tenaga modern dipresentasikan oleh sebuah sistem interkoneksi yang sangat tergantung pada kontrol untuk memanfaatkan secara optimal sumber daya yang ada. Sumber yang dapat diperbarui dan ekonomi energi listrik merupakan faktor penentu perkembangan industri yang bisa meningkatkan standar hidup masyarakat. Sejak revolusi industri, kebutuhan energi listrik meningkat tajam. Sebagian besar energi yang dibutuhkan oleh masyarakat modern disuplai dalam bentuk energi listrik. Peningkatan kebutuhan energi listrik yang sebanding dengan keterbatasan antara sumber daya dan lingkungan merupakan tantangan yang harus dihadapi oleh perancang sistem. Sebuah keterbatasan pada penyaluran daya akan menimbulkan usaha untuk meningkatkan kemampuan jaring transmisi dalam pencarian solusi teknologi terbaik. Perkembangan rekayasa kontrol yang sangat cepat cenderung mengatur penyaluran daya pada saluran transmisi daya listrik sesuai kebutuhan dan bervariasi dari waktu ke waktu menggunakan kontrol yang terpadu dan optimal.
8
2.2 Kestabilan Sistem Tenaga Listrik
Stabilitas sistem tenaga listrik telah menjadi perhatian utama dalam sebuah sistem operasi. Perhatian itu muncul dari fakta bahwa pada kondisi keadaan mantap (steady state), kecepatan rata-rata untuk semua generator harus sama. Kondisi tersebut dinamakan pada operasi sinkron dari sebuah sistem yang terinterkoneksi. Gangguan kecil atau besar pada sistem tenaga berdampak pada operasi sinkron. Sebagai contoh, kenaikan atau penurunan tiba-tiba pada beban, atau akibat rugi pembangkitan, menjadi salah satu jenis gangguan yang berpengaruh sangat signifikan terhadap sistem. Jenis lain dari gangguan adalah jaring transmisi terputus, beban lebih (over load), atau hubung singkat. Dengan demikian diharapkan stabilitas sistem akan menuju ke keadaan mantap dalam waktu singkat setelah gangguan menghilang. Hal itu merupakan gambaran dari sebuah sistem yang dianggap sukses.
9
2.2.1 Kestabilan Steady State
Kestabilan steady state adalah kemampuan sistem tenaga untuk mencapai kondisi stabil pada kondisi operasi baru yang sama atau identik dengan kondisi sebelum terjadi gangguan setelah sistem mengalami gangguan kecil. Analisis kestabilan steady state menggunakan pendekatan model linear. Kestabilan steady state pada sistem tenaga dapat disebut sebagai kestabilan sinyal kecil (small signal stability). Kestabilan steady state merupakan sebuah fungsi dari kondisi operasi.
2.2.2 Kestabilan Transien
Kestabilan transien adalah kemampuan sistem tenaga untuk mencapai kondisi stabil operasi baru yang dapat diterima setelah sistem mengalami gangguan besar. Analisis kestabilan transien menggunakan pendekatan model nonlinear. Kestabilan transien pada sistem tenaga adalah respon output yang mencapai kondisi operasi steady state yang diizinkan dan sistem yang dapat kembali ke posisi semula pada saat sistem mengalami gangguan. Kestabilan transien merupakan fungsi dari kondisi operasi dan gangguan.
10
2.3 Operasi Sistem Tenaga
DyLiacco, Fink, dan Carlson mengklasifikasikan operasi sistem tenaga menjadi 5 (lima) keadaan, yaitu keadaan aman, keadaan siaga, keadaan darurat, keadaan berbahaya, dan keadaan restoratif. Klasifikasi operasi sistem tenaga secara rinci dapat dijelaskan sebagai berikut:
1. Keadaan Aman
Pada keadaan ini semua batasan persamaan tegangan (Vt) dan
pertidaksamaan arus (I) dipenuhi. Pada keadaan ini, pembangkitan dianggap cukup mensuplai kebutuhan beban yang ada serta tidak ada peralatan yang melebihi batas kerja. Demikian juga pada keadaan ini, batas cadangan cukup untuk memenuhi tingkat keamanan dengan mengutamakan sistem utama. Aktivitas berikutnya adalah meningkatkan kepuasan keamanan.
2. Keadaan Siaga
11
3. Keadaan Darurat
Untuk gangguan besar, sistem dapat masuk ke dalam keadaan darurat. Di sini variabel (I) terganggu, dan bagaimanapun juga sistem akan tetap utuh dan kontrol darurat dapat digunakan untuk memperbaiki sistem menuju ke keadaan siaga. Jika kontrol tersebut tidak efektif, dan gangguan awal cukup besar dan melebihi batas sistem, maka sistem akan jatuh dan mencapai keadaan berbahaya.
4. Keadaan Berbahaya
Keadaan berbahaya terjadi jika dua variabel (I) dan (Vt) diganggu. Gangguan
pada keseimbangan variabel berdampak pada pelepasan beban sistem. Kontrol darurat diusahakan untuk menghindari sistem jatuh total.
5. Keadaan Restoratif
Keadaan ini merupakan transisi untuk variabel (I) yang bertemu dengan kontrol darurat, tetapi variabel (Vt) belum dapat terpenuhi. Dari keadaan ini,
sistem dapat berpindah ke kedua jenis keadaan (siaga atau aman).
Untuk pengembangan lebih lanjut dalam pendefinisian keadaan sistem, darurat sistem tenaga dapat didefinisikan sebagai:
1. Krisis Viabilitas, krisis ini terjadi akibat ketidakseimbangan antara pembangkit, beban, transmisi lokal atau sistem luas.
12
Keadaan berbahaya berhubungan dengan karakteristik kesalahan dari sebuah sistem dan kehilangan integritas sistem, termasuk pemecahan yang tidak dapat terkontrol. Hal itu menjelaskan bahwa objek kontrol pada keadaan darurat seharusnya menghindari transisi dari keadaan darurat ke keadaan bahaya. Oleh sebab itu, pengetahuan tentang dinamika sistem sangat penting untuk mendesain kontroler yang berhubungan dengan keadaan sistem.
2.4 Permasalahan Dinamika Sistem Tenaga
Pada tahap awal perkembangan sistem tenaga, lebih dari 50 tahun yang lalu, kedua permasalahan kestabilan (steady state dan transien) menjadi tantangan bagi para perancang. Pembangunan fast acting static exciter dan electronic voltage regulator untuk mengatasi tingkat permasalahan kestabilan transien dan steady state.
Perkembangan di bidang operasi kecepatan tinggi circuit breaker dan pengurangan waktu dalam penghilangan gangguan juga telah terbukti dapat meningkatkan kestabilan sistem.
13
berkembang dengan sangat cepat. Desain kontrol sistem pada prime-mover juga dapat membantu meningkatkan performansi dinamika sistem, khususnya stabilitas frekuensi.
Di sisi lain, problem osilasi tenaga frekuensi rendah menjadi hal yang sangat penting untuk dicermati. Osilasi frekuensi berada antara 0,2 sampai dengan 2,0 Hz. Frekuensi yang lebih rendah dapat semakin meluas menjadi osilasi interarea. Osilasi tersebut ditemukan pada fast voltage regulation dalam generator. Hal itu dapat dibantu dengan penyediaan peralatan kontrol tambahan berupa Power System Stabilizer (PSS). Desain dan perkembangan PSS yang efektif akhir-akhir ini banyak
diinvestigasi oleh para peneliti.
Problem utama lain yang dihadapi oleh sistem tenaga modern adalah tegangan jatuh atau ketidakstabilan tegangan yang merupakan hasil dari ketidakstabilan kondisi mantap. Sejarah mencatat bahwa ketidakstabilan steady state berhubungan dengan ketidakstabilan sudut daya dan kehilangan sinkronisasi antar generator secara perlahan. Kejatuhan tegangan bus beban di bawah kondisi beban tinggi dan batas daya reaktif secara perlahan adalah fenomena yang saat ini sedang banyak diminati.
14
kontroler yang cocok untuk mengatasi masalah. Sistem tidak hanya menempatkan kontroler pada generator seperti eksitasi dan kontroler pengatur kecepatan, tetapi juga kontroler pada HVDC converter station, Static VAR Compensator (SVC), dan peralatan FACTS yang lain. Peralatan kontrol baru seperti Thyristor Controlled Series Compensation (TCSC), STATCOM, dan Static Phase Shifter (SPS) melaju
terus dan berkembang pesat. Keanekaragaman penggunaan kontroler saat inimenjadi tantangan bagi para perancangan untuk menghasilkan kombinasi yang ideal.
Peralatan yang digunakan untuk menyelesaikan studi problem dinamika sistem di waktu lampau amat sederhana. Simulasi analog menggunakan AC Network Analyser tidak mencukupi untuk model generator secara detail. Keuntungan
komputer digital tidak hanya dapat mengantar model peralatan kompleks, tetapi juga dapat mensimulasikan sistem skala besar. Model realistis memungkinkan simulasi sistem melebihi periode yang lebih lama dari periode sebelumnya. Kontrol modern dapat diaplikasikan untuk memperbaiki performansi sistem. Sekarang banyak dikembangkan implementasi kontrol modern sebagai peralatan yang cerdas untuk memperbaiki performansi sistem tenaga listrik, seperti aplikasi Optimal Control, Fuzzy Logic Control, dan Genetic Algorithm. Walaupun sebagian masih terbatas
15
2.5 Kestabilan Transfer Daya Generator
Generator beroperasi dalam keadaan stabil, jika terdapat keseimbangan antara daya input mekanis penggerak utama (prime mover) dengan daya output listrik. Dalam keadaan ini generator berputar dalam kecepatan sinkron dengan tegangan keluaran 1 pu. Jika terjadi ketidakseimbangan misal karena kenaikan atau penurunan beban maka generator akan mengalami transien yaitu menyimpangnya nilai kecepatan rotor generator (frekuensi sitem) dan tegangan dari nilai nominal. Agar kecepatan rotor dan tegangan keluaran generator kembali normal, governor dan rangkaian eksitasi akan bereaksi menyeimbangkan daya input dan output. Jika akibat beroperasinya governor dan rangkaian eksitasi, nilai kecepatan dan tegangan menuju nilai baru atau kembali ke nilai nominal, berarti generator tersebut stabil. Sebaliknya, bila akibat beroperasinya governor dan rangkaian eksitasi, nilai kecepatan dan tegangan tidak konvergen ke satu niali, bearti generator tersebut tidak stabil.
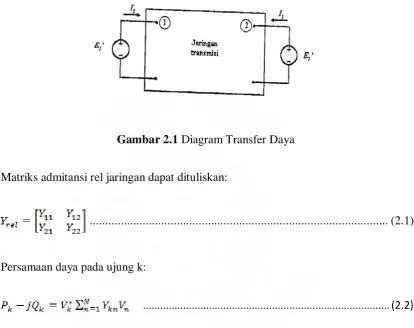
Kestabilan generator bergantung pada banyak faktor. Di samping faktor kecepatan respon governor dan eksitasi, kestabilan generator sangat bergantung pada nilai sudut daya generator pada nilai transfer daya tertentu dan reaktansi jaringan antara generator dan beban. Untuk memahami lebih lanjut mengenai fenomena kestabilan transfer daya generator ditunjukkan gambar 2.1. Gambar 2.1 adalah skema generator yang mencatu daya melalui sistem transmisi ke sistem ujung penerima pada rel 2. Segiempat yang terlihat mewakili sistem transmisi yang terdiri dari komponen pasif linear seperti transformator, saluranb transmisi, kapasitor dan termasuk juga reaktansi peralihan generator tersebut. Tegangan E’1 mewakili
16
sini di anggap sebagai tegangan tak terhingga atau tegangan dalam peralihan motor serempak yang reaktansi peralihannya sudah dimasukkakn ke dalam jaringan.
Gambar 2.1 Diagram Transfer Daya
Matriks admitansi rel jaringan dapat dituliskan:
... (2.1)
Persamaan daya pada ujung k:
... (2.2)
Dengan k dan n berturut-turut sama dengan 1 dan 2. Dengan menggantikan V dengan E’, dapat dituliskan
... (2.3)
bila,
17
Diperoleh
... (2.4)
... (2.5)
Persamaan-persamaan yang serupa berlaku juga pada rel 2. Jika didefinisikan
Dan menetapkan sudut baru sedemikian rupa sehingga
Maka
... (2.6)
... (2.7)
Persamaan (2.5) dapat ditulis dengan lebih sederhana sebagai
... (2.8)
Persamaan (2.7) dinamakan persamaan sudut daya. Bila jaringan dianggap tanpa resistansi, semua unsur Yrel adalah suseptansi sehingga G11 dan keduanya adalah
nol. Persamaan sudut daya yang kemudian berlaku untuk jala-jala reaktansi murni adalah hanya merupakan persamaan yang sudah dikenal:
18
... (2.10)
Dengan X adalah reaktansi transfer antara E’1 dan E’2. Persamaan (2.8) menjelaskan
bahwa daya maksimum yang bisa ditransfer oleh generator sangat bergantung nilai reaktansi jaringan. Jika suatu generator mentransfer lebih dari daya maksimumnya maka akan terjadi ketidakstabilan berupa hilangnya sinkronisasi pada generator. Jika masih terjadi kenaikan beban, maka kopling magnet rotor dan stator akan lepas. Upaya menaikan batas maksimum trnsfer daya dapat dilakukan dengan memperkecil nilai reaktansi jaringan.
2.6 Load Frequency Control
Sistem pengaturan prime mover memberikan sarana untuk mengendalikan frekuensi dan daya listrik. Frekuensi sistem bergantung pada keseimbangan daya aktif. Fluktuasi permintaan daya aktif pada satu titik direfleksikan oleh sistem sebagai fluktuasi frekuensi. Karena banyak generator penyalur daya listrik terhubung pada sistem, maka diharuskan menyediakan metode yang tepat untuk mengalokasikan fluktuasi permintaan daya tersebut.
19
Dengan aksi kontrol kecepatan primer, perubahan pada beban sistem akan berpengaruh pada penyimpangan frekuensi steady state, bergantung pada karakteristik droop governor dan sensitivitas frekuensi beban. Semua unit pembangkit dengan pengaturan kecepatan akan memberikan kontribusi pada perubahan pembangkitan dengan mengabaikan lokasi perubahan beban. Sarana dasar untuk mengatur daya prime mover agar sesuai dengan variasi beban pada perilaku yang diinginkan adalah melalui kontrol set-point referensi beban pada unit pembangkit yang dipilih. Seiring dengan beban sistem yang selalu berubah, diperlukan perubahan output secara otomatis dengan kontrol pembangkitan. Tujuan utama dari kontrol pembangkitan otomatis adalah untuk mengontrol frekuensi pada nilai nominal yang telah ditentukan dan untuk menjaga pertukaran daya antar kontrol area pada nilai yang dijadwalkan dengan menyesuaikan output dari generator. Fungsi ini secara umum disebut sebagai Load Frequency Control (LFC).
2.7 Flexible AC Transmision System (FACTS)
20
Institute (EPRI) di Palo Alto negara bagian California di Amerika Serikat. Pada awal pengembangannya, teknologi FACTS ditujukan untuk menjawab permasalahan dalam peningkatan kapasitas pengaliran daya listrik pada sistim jaringan transmisi dan juga untuk menyediakan peralatan kendali daya listrik yang terpercaya pada jalur transmisi yang diinginkan.
21
Thyristor Controlled Series Compensation (TCSC), STATCOM, Static Phase Shifter
(SPS) dan lain-lain.
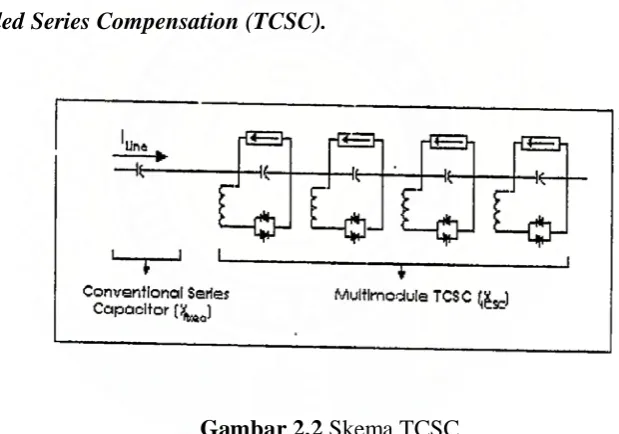
Upaya menaikkan batas maksimum transfer daya dapat dilakukan dengan memperkecil nilai reaktansi jaringan. Cara yang paling efektif adalah dengan menggunakan kompensasi kapasitor seri (salah satu jenis FACTS). Disamping meningkatkan kestabilan dinamik, kapasitor seri juga berfungsi memperbaiki regulasi tegangan dan keseimbangan daya reaktif serta memperbaiki load sharing antar saluran paralel. Salah satu bentuk peralatan kapasitor seri adalah Thyristor Controlled Series Compensation (TCSC).
Gambar 2.2 Skema TCSC
2.8 Subsynchronous Resonance (SSR)
22
Power System Stabilizer (PSS). Cara inilah yang akan dikembangkan dalam tugas akhir ini.
23
BAB III
PEMODELAN SISTEM TENAGA LISTRIK
3.1 Umum
Sistem tenaga listrik terdiri dari bagian-bagian yang kompleks, seperti; pembangkit, sistem transmisi, saluran distribusi, beban yang dinamik dan lain-lain. Antara bagian yang satu dengan yang lain saling berinteraksi. Kondisi beban yang di-namik dapat mempengaruhi putaran generator, tegangan dan variabel state sistem yang lain. Pembangkit yang tersambung secara interkoneksi terdiri dari beberapa mesin (terkopling) yang mempunyai daya dan karakteristik yang identik. Sehingga ayunan dari salah satu mesin saling mempengaruhi mesin yang lain dalam unit pembangkit tersebut. Mesin-mesin dalam satu unit pembangkit akan beraksi bersama-sama secara serempak untuk menanggulangi pengaruh ayunan dari unit pembangkit yang lain. Untuk mengetahui prilaku tiap-tiap variabel sistem, diperlu-kan suatu analisis kestabilan sistem tenaga listrik.
tran-24
sien digunakan pendekatan model nonlinear, sedangkan model linear digunakan untuk menganalisis kestabilan dinamik .
Berbagai usaha telah dilakukan untuk memperbaiki kestabilan sistem tenaga listrik. Usaha tersebut dilakukan menggunakan cara pemasangan peralatan kontrol pada sistem tenaga, misal pemasangan PSS dan TCSC Controller. Dalam Tugas Akhir ini, dilakukan koordinasi penalaan PSS secara serempak. Untuk menyelesai-kan permasalahan tersebut, diperlumenyelesai-kan model sistem tenaga listrik. Model sistem te-naga listrik yang digunakan adalah model linear.
Pada bab ini, dibahas secara singkat mengenai pemodelan linear sistem tenaga listrik, mulai dari generator sinkron, governor, eksitasi, dan PSS.
3.2 Pemodelan Sistem Tenaga Listrik
3.2.1 Model Sistem Tenaga Listrik Multimesin
Kesahihan analisis studi kestabilan dinamik (kestabilan di daerah sekitar titik kerja) jaring tenaga listrik yang meliputi respons dinamik sistem tergantung pada kesahihan pemodelan sistem tersebut.
Untuk memudahkan pemahaman tentang multimesin,di sini akan dijelaskan beberapa istilah yang akan digunakan, yaitu:
1. Mesin tunggal adalah sebuah mesin (generator) yang mensuplai daya ke suatu beban tanpa dibantu oleh mesin lain.
25
3. Sistem pendistribusian multiarea adalah pendistribusian daya listrik di suatu daerah (area) yang dilayani oleh satu atau beberapa bus (gardu induk) yang ada di daerah tersebut dan merupakan bagian dari sistem interkoneksi.
4. Sistem interkoneksi adalah sistem terpadu penyaluran tenaga listrik yang dicatu oleh pembangkit yang berkapasitas besar.
5. Sistem multimesin adalah gabungan dari beberapa pembangkit (bisa terdiri dari mesin terkopling atau mesin tunggal) yang tersambung secara interkoneksi.
6. Beban statik adalah beban tenaga listrik yang berupa beban lokal atau beban bukan lokal yang harga impedansinya dianggap tetap.
7. Beban lokal adalah beban yang berada pada bus pembangkit.
3.2.2 Model Linear Sistem
Model sistem linear jaring tenaga listrik multimesin berbasis pada pemodelan Park dengan asumsi sebagai berikut:
1. Tahanan stator diabaikan.
2. Kondisi sistem dianggap seimbang dan kejenuhan inti generator diabaikan. 3. Beban dianggap sebagai beban statik.
3.2.3 Jaringan Transmisi Tenaga Listrik
26
Gambar 3.1 Diagram Sebuah Mesin Pada Sistem Multimesin
3.2.4 Model Linear Dinamika Sebuah Mesin Sinkron
Untuk memahami dinamika sistem multimesin serta pengendaliannya, terlebuh dahulu diuraikan tentang dinamika dasar sebuah generator sinkron ditunjukkan pada gambar 3.2.
Gambar 3.2 Dinamika Dasar Generator Sinkron
Suatu generator agar menghasilkan energi listrik, membutuhkan duaa masukan, yang pertama torsi mekanik turbin (Tm). Torsi ini berfungsi untuk memutar
27
rangkaian medan, melalui lilitan yang terdapat pada rotor. Dengan adanya torsi
mekanik, rotor generator berputar dengan energi kinetik 1/2J 2
joule. Momentum
sudut M=J joule detik, dengan (radian per detik) merupakan kecepatan sudut dan
J adalah momen inersia (kg-m2). Fluksi yang dibangkitkan oleh kumparan medan rotor dengan arus If akan berputar dan menginduksikan gaya gerak listrik pada
kumparan stator sebesar:
E = c n ... (3.1)
Persamaan Ayunan Rotor Generator Sinkron
Jika generator sinkron dibebani, akan mengalir arus dari generator ke beban. Selanjutnya arus ini menghasilkan fluksi pada stator dan akan menimbulkan torsi elektrik (Te) melawan torsi mekanik. Pada kondisi tunak, jumlah torsi mekanik
dengan torsi elektrik sama dengan nol (Tm-Te = 0), dan generator akan berputar pada
kecepatan sudut sinkron ( 0). Sebelum mencapai kondisi tunak ada masa transient
dan jumlah torsi ini menimbulkan terjadinya torsi akserasi dan akan menimbulkan percepatan atau perlambatan, persamaan gerak pada kondisi ini adalah:
Ta = Tm – Te = J
... (3.2)
dengan :
Tm = Torka mekanik turbin (Nm)
Te = Torka elektrik rotor (Nm)
28
t = waktu (detik)
m = Sudut mekanis rotor (rad-mekanik)
J = Total momen inersia mesin sinkron (kg.m2)
J = M/ 0
Persamaan (3.2) dikali dengan kecepatan sudut ( m), sehingga di dapat
persamaan:
... (3.3)
Dengan:
Pm = Daya mekanik pada rotor (Watt)
Pm = Tm m
Pe = Daya elektrik pada rotor (Watt)
Pe = Te e
Pa = Daya percepatan (Watt)
m = Kecepatan sudut sinkron (rad- mekanik/s)
Persamaan di atas dapat diubah menjadi:
... (3.4)
29
………....(3.5)
Jika
Maka persamaan (3.5) dapat disederhanakan menjadi:
(pu) ... (3.6)
Dalam persamaan sudut dan kecepatan elektrik, didapatkan
(pu) ... (3.7)
Dengan:
s = Kecepatan sudut sinkron (rad/detik)
= Sudut elektrik rotor (rad)
30
Persamaan (3.7) disebut persamaan ayunan mesin, adalah persamaan dasar yang mengatur dinamika (gerak) perputaran mesin sinkron dalam studi kestabilan. Dari persamaan tersebut dapat diketahui bahwa perbedaan antara daya mekanik turbin dan daya elektrik generator menyebabkan sudut rotor mengalami percepatan atau perlambatan.
Karena mesin juga memiliki komponen torsi yang sebanding dengan kecepatan sudut, persaman gerak rotor secara lengkap dinyatakan sebagai berikut:
... (3.8)
Dimana:
D = koefisien redaman mesin
Suatu generator yang beroperasi pada kondisi tunak (Tm=Te), 0, E’q0,
kemudian terjadi penambahan beban kecil akan menyebabkan kenaikan fluksi medan stator yang akan menyebabkan perubahan E’q, perubahan kecil juga akan
menyebabkan perubahan sudut mesin dan perubahan torsi elektrik, torsi elektrik akan naik dengan bertambahnya sudut mesin , dan E’q, perubahan torsi elektrik ini
dinyatakan:
... (3.9)
31
Jika torsi mekanik konstan, maka persamaan gerak putar rotor untuk perubahan beban kecil disekitar kondisi itu adalah:
... (3.10)
Jika didefinisikan:
d/dt = S dan d2/dt2 = S2
maka persamaan di atas menjadi :
... (3.11)
32
Gambar 3.3 Diagram Blok Model Dinamika Sebuah Generator Sinkron
Gambar 3.3 di atas menggambarkan dinamika sistem sebuah generator sinkron, sehubungan dengan adanya perubahan beban kecil disekitar titik operasi pada kondisi operasi sitem.
Pengaruh perubahan beban kecil juga dirasakan oleh lilitan jangkar sehingga medan E’qmengalami perubahan sebesar E’q, besarnya perubahan tegangan medan
ini dipengaruhi oleh perubahan sudut mesin ( ) dan jika tegangan medan eksitasi
konstan ( EFD=0), maka:
... (3.12)
33
Hubungan di atas digambarkan dalam bentuk diagram pada gambar 3.4 berikut.
Gambar 3.4 Dinamika Model Reaksi Jangkar Terhadap Perubahan Sudut
Selanjutnya perubahan tegangan medan berpengaruh terhadap tegangan terminal generator begitu juga perubahan sudut mesin. Perubahan tegangan terminal akibat perubahan sudut mesin dan perubahan tegangan medan dinyatakan:
Vt = K5 + K6 E’q ... (3.13)
34
Dalam bentuk diagram digambarkan sebagai berikut:
Gambar 3.5 Diagram Mode Tegangan
Regulator tegangan (AVR) yang dipasang pada terminal generator digunakan untuk mengatur tegangan medan eksitasi (EFD), selisih keluaran tegangan terminal
generator yang terjadi dengan tegangan yang diinginkan merupakan input bagi AVR untuk mengatur tegangan medan eksitasi. Jika perubahan medan eksitasi harus
diperhitungkan ( EFD≠0), maka bentuk persamaan medan menjadi:
………(3.14)
Dengan,
EFD = (KA/(1+TAS)) Vt ; keluaran tegangan medan dari sistem eksitasi.
35
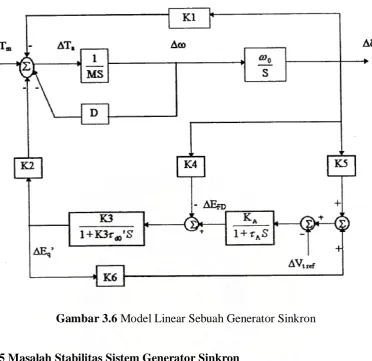
Gambar 3.6 Model Linear Sebuah Generator Sinkron
3.2.5 Masalah Stabilitas Sistem Generator Sinkron
Di sini akan ditinjau atau dianalisa masalah kestabilan mesin sinkron berdasarkan torsi redaman dan torsi sinkronisasi yang timbul serta pengaruhnya terhadap kestabilan sistem generator sinkron.
Perubahan torsi elektrik:
Te= K1 + K2 E’q ... (3.15)
Dengan, E’q= +
Te total dapat dinyatakan dengan,
36
Dengan, A = K1 +
Diagram berikut ini secara khusus menggambarkan kelakuan dinamik rotor dari generator sinkron.
Gambar 3.7 Blok Diagram Model Dinamika Gerak Rotor dengan Memasukkan Efek
Loop Reaktif
Dengan fungsi transfer:
... (3.17)
Kemudian dalam bentuk umum (staandard):
... (3.18)
Dari loop A menghasilkan torsi sinkronisasi, dari loop B menghasilkan torsi redaman. Persamaan karakteristik loop mekanik:
... (3.19)
37
(faktor redaman)
(frekuensi natural)
(frekuensi redaman)
Sehingga akar-akar persamaan karakteristiknya (nilai eigen) adalah:
... (3.20)
Dari akar-akar karakteristik (nilai eigen) dapat dilihat sifat kestabilan sistem. Sistem stabil jika bagian riil nilai eigen berharga negatif atau , kondisi ini dipenuhi jika:
(D+B) > 0 ; torsi redaman (TD) bernilai positif
A > 0 ; torsi sinkronisasi (TS) bernilai positif
Akan timbul masalah jika TD dan TS sangat kecil atau negatif, dan sudut daya
akan bertambah terus tidak mencapai konvergen dan amplitudo osilasi sistem semakin membesar sehingga sistem tidak stabil. Dapat disimpulkan bahwa:
> 0 maka sistem stabil
38
Persoalan bagaimana dapat diatur sehingga stabilitas sistem bertambah baik. Kemudian akan dilihat bagaimana kontribusi torsi redaman maupun torsi sinkronisasi dari masing-masing loop (loop mekanik dan loop elektrik).
3.2.6 Kontribusi Torsi Redaman dan Torsi Sinkronisasi Dari Loop Mekanik dan Loop Elektrik
A. Loop Mekanik
Gambar 3.8 Blok Diagram Model Loop Mekanik Dinamika Mesin Sinkron
Persamaan karakteristik loop mekanik:
S2+ (D/M) S + (K1 0/M) = 0
Dalam bentuk umum adalah:
... (3.21)
Dengan,
39
(frekuensi natural)
(frekuensi redaman)
Melalui loop mekanik, torsi yang dihasilkan adalah sebagai berikut:
Te = K1 + D ... (3.22)
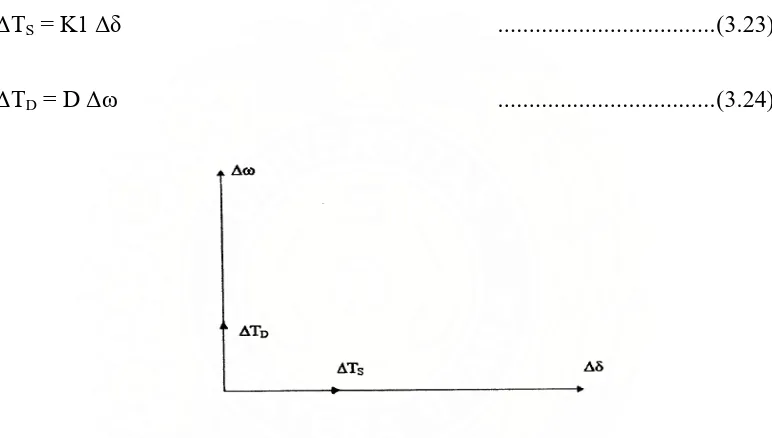
TS = K1 ... (3.23)
TD= D ... (3.24)
Gambar 3.9 Diagram Phasa Torsi Sinkronisasi dan Torsi Redaman
Perubahan sudut rotor ( ) mengakibatkan timbulnya torsi melawan arah perubahan
sebagai torsi sinkronisasi TSyang sefasa dengan .
T/ = K1 (koefisien redaman) ... (3.25)
Sedangkan perubahan kecepatan sudut rotor ( ) juga menyebabkan timbulnya torsi
yang melawan perubahan sebagai torsi redaman TDyang sefasa dengan .
40
Torsi redaman TD dan torsi sinkronisasi TS berbeda fasa 90o dengan torsi redaman
mendahului torsi sinkronisasi.
K1 > 0 ; tergantung pada operasi mesin, parameter dan jaringan
D > 0 ; koefisien gesekan antara bantalan poros udara dan belitan
Sehingga kontribusi loop mekanik memberikan torsi redaman maupun torsi sinkronisasi yang berharga positif.
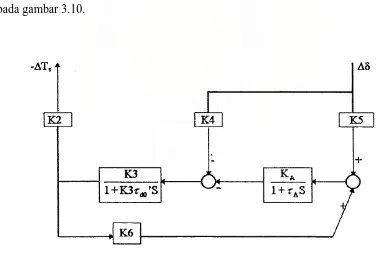
B. Dari Loop Elektrik Dalam Dua Mode
Reaksi jangkar dan perubahan tegangan terminal, secara diagram ditunjukkan pada gambar 3.10.
41
1. Reaksi Jangkar (jalur K4) Fungsi transfer dinyatakan:
... (3.27)
Perubahan sudut rotor juga mengakibatkan terjadinya reaksi jangkar yang melalui K4. Kejadian ini akan menyebabkan perubahan fluks cakupan pada generator, kemudian dengan K2 akan menghasilkan torsi sinkronisasi (TS)
dan torsi redaman (TD).
Torsi yang dihasilkan dinyatakan dengan:
... (3.28) Torsi sinkronisasi sefasa terhadap perubahan sudut rotor ( ), diperoleh dari nilai nyata :
.. (3.29)
Torsi redaman sefasa dengan perubahan kecepatan ( ), diperoleh dari
imajiner :
... (3.30)
2. Perubahan Tegangan Terminal (melalui loop K5)
42
menghasilkan torsi sinkronisasi (TS) dan torsi redaman (TD). Dengan
memperhitungkan efek AVR dan eksitasi maka diperoleh hubungan:
... (3.31)
Torsi sinkronisasi adalah:
... (3.32)
Torsi redaman adalah:
... (3.33)
Selanjutnya masing-masing torsi yang dihasilkan dari loop mekanik dan loop elektrik menghasilkan resultan torsi. Sistem akan stabil jika:
Total TS = (K1 + TS Reaksi jangkar + TS Tegangan terminal) > 0
43
Jika masing-masing koefisien ada yang bernilai negatif, maka sistem menjadi tidak stabil.
Dengan memperhatikan persamaan (3.17) sampai dengan (3.31) , harga-harga dari koefisien di atas tergantung dari nilai , dan KA serta K1 s/d K6.
Sedangkan harga K1 s/d K6 tergantung juga pada kondisi operasi dan pembebanan. Dalam sistem yang terdiri dari sebuah pembangkit, harga K1 s/d K4 dan K6 selalu bernilai positif, sedangkan K5 bernilai positif atau negatif tergantung kondisi operasi. Keadaan K5 yang demikian ini akan membawa masalah yang serius dalam operasi sistem tenaga.
Jika keadaan pembebanan menghasilkan K5 negatif dan menyebabkan torsi redaman menjadi negatif, maka harga total redaman menjadi turun atau bernilai negatif, dan sistem menjadi tidak stabil. Situasi ini akan diperburuk dengan pemasangan AVR yang bertujuan menstabilkan tegangan, sebab nilai K5 akan diperbesar oleh penguatan AVR (KA). Melihat bentuk persamaan (3.31), maka
dapat diusahakan untuk mengatur torsi redaman, yaitu dengan cara mengatur (memperkecil) penguatan AVR (KA), tetapi cara ini tidak dapat dilakukan sebab
penguatan exciter yang besar sangat dibutuhkan untuk menghasilkan torsi sinkronisasi yang besar.
44
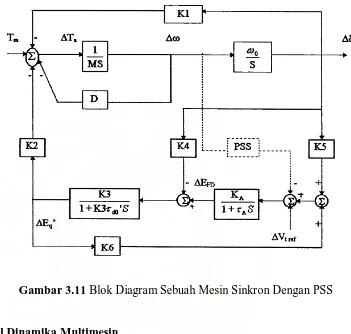
atau daya. PSS merubah menjadi sinyal tegangan untuk diumpankan ke sistem eksitasi bersama dengan sinyal referensi, seperti pada gambar 3.11 berikut.
Gambar 3.11 Blok Diagram Sebuah Mesin Sinkron Dengan PSS
3.3 Model Dinamika Multimesin
Model mesin sinkron yang berinteraksi dengan mesin-mesin lain pada model multimesin, yang terhubung melalui saluran transmisi yang mempunyai tahanan Re
dan reaktansi Xe dengan pembatasan sebagai berikut:
1. Keadaan dianggap setimbang, 2. Beban bersifat statik,
45
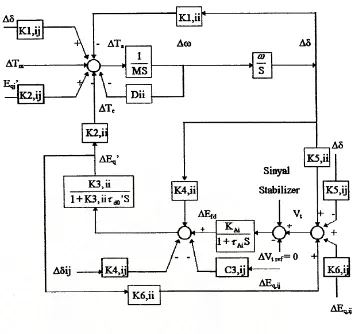
Gambar 3.12 Diagram Sistem Generator Sinkron Dalam Model Multimesin
Dari diagram terlihat bahwa dan dari mesin yang lain (j) mempengaruhi mesin itu (i) dibagian:
46
3.3.1 Persamaan Dinamik
Dengan mengacu pada model dinamika sebuah mesin pada bagian 3.2 serta dengan memperhatikan pengaruh dari mesin-mesin yang lain seperti terlihat pada gambar 3.12, persamaan dinamik meliputi:
a. Persamaan Torsi dan Sudut Rotor
Perubahan torsi elektrik dan kecepatan sudut rotor yang timbul pada mesin i pada sistem multimesin selain oleh sebab mesin itu sendiri, dipengaruhi juga dari mesin lain (j) sehingga didapatkan persamaan:
... (3.34)
... (3.35)
... (3.36)
47
b. Persamaan Tegangan Terminal
Perubahan sudut mesin dan perubahan tegangan medan dari mesin ke-j memberikan pengaruh pada mesin ke-I melalui K5,ike-j dan K6,ike-j sehingga tegangan terminal mesin ke-I adalah:
... (3.37)
48
c. Persamaan Medan
Perubahan sudut mesin dan tegangan medan mesin ke-j memberikan pengaruh pada mesin ke-i melalui K4,ij dan K3,ij dan persamaan medan stator mesin ke-i menjadi:
) UEi+ (1/ Ai) EFD -(KAi/ Ai) Vti
... (3.38)
Dengan,
C3,ii = 1-(Xdi-X’di)Bii
C3,ii = 1/K3,ii
C3,ij = (Xdi-X’di)YijSij
49
3.3.2 Pemodelan Sistem Eksitasi
Model sistem eksitasi dalam pengaturan tegangan mengacu pada model standar IEEE yang paling sederhana, yaitu tipe1 seperti yang ditunjukkan pada gambar 3.13. KAi , KFi, KEi, TAi, TEi, TFi, dan U2i
berturut-turut merupakan konstanta penguatan filter, konstanta penguatan exciter, waktu tanggap amplifier, waktu tanggap exciter, waktu tanggap filter, dan perubahan sinyal kontrol mesin ke-i.
Gambar 3.13 Sistem Eksitasi Tipe 1 IEEE
VAi = Perubahan tegangan amplifier mesin ke-i
VFi= Perubahan tegangan keluaran penyearah mesin ke-i
3.3.3 Pemodelan Turbin dan Sistem Pengaturannya
50
a. Turbin Air
Turbin air memiliki input berupa tenaga mekanik dari dorongan air yang keluar dari pipa air (penstock) bendungan, dan memiliki output tenaga (torka) mekanik yang digunakan untuk memutar generator. Turbin juga memiliki peralatan pelengkap pendamping sebagai pengatur putaran yang disebut governor. Model linear dari turbin air dan governor secara sederhana dapat dibentuk dalam diagram blok, seperti ditunjukkan pada gambar 3.14.
Gambar 3.14 Model Linear Turbin Air dan Pengaturannya
Yi, Twi, Tgi, Kgi, Ri, d an U1i berturut-turut merupakan perubahan
51
... (3.39)
... (3.40)
b. Turbin Uap
Sama seperti turbin air , turbin uap memiliki input berupa energi mekanik yang disemburkan dari ketel uap dan memiliki output energi (torka) mekanik yang digunakan untuk menggerakkan turbin uap.
Model turbin uap dalam bentuk linear dapat dilihat pada gambar 3.15. Dalam model-model linear, perbedaan antara turbin air dan turbin uap terletak pada harga-harga parameternya.
Gambar 3.15 Model Linear Turbin Uap dan Pengaturannya
Kgui, Tgui, dan Ttui, masing-masing merupakan konstanta (parameter)
penguatan pengatur turbin uap, waktu tanggap pengatur turbin uap, dan waktu tanggap turbin uap mesin ke-i.
52
...
(3.42)3.4 Power System Stabilizer
Kestabilan dinamik dalam sistem daya listrik ditentukan oleh kemampuan berbagai komponen pembangkit dalam pemberian transfer respon terhadap perubahan beban yang terjadi. Perubahan beban yang terjadi secara tiba-tiba dan periodik tidak dapat direspon dengan baik oleh generator sehingga dapat mempengaruhi kestabilan dinamik sistem. Respon yang kurang baik dapat menimbulkan osilasi frekuensi dalam periode yang lama. Hal itu akan mengakibatkan pengurangan kekuatan transfer daya yang dapat diatasi menggunakan peralatan tambahan yang disebut Power System Stabilizer (PSS).
3.4.1 Konsep Dasar PSS
PSS merupakan peralatan yang menghasilkan sinyal kontrol untuk diumpankan pada sistem eksitasi. Namun pada pendekatan yang lebih baru, sinyal kontrol yang keluar dari PSS diumpankan juga ke sisi turbin. Fungsi dasar PSS adalah menambah batas kestabilan dengan mengatur eksitasi generator untuk memberi redaman terhadap osilasi rotor mesin sinkron. Ketidakmampuan meredam osilasi dapat membatasi kemampuan transfer daya.
3.4.2 Komponen PSS
Implementasi sebuah PSS pada sistem daya yang disambungkan melalui Vp
53
Gambar 3.16 Sebuah Sistem PSS pada Generator ke-i
Blok diagram model PSS ditunjukkan pada gambar 3.17.
Gambar 3.17 PSS Dalam Bentuk Model Linear
Berikut penjelasan fungsi masing-masing blok pada gambar 3.17.
1. Blok Gain
Gain berfungsi untuk mengatur besar penguatan agar diperoleh besaran torsi
sesuai dengan yang diinginkan. 2. Blok Washout
Washout filter berfungsi untuk menyediakan bias steady state output PSS
54
tidak untuk sinyal DC offset. Washout filter bekerja sebagai high pass filter yang melewatkan semua frekuensi yang diinginkan. Jika hanya mode lokal yang diinginkan, nilai Tw dapat dipilih dalam range 1 sampai 2. Tetapi, jika
mode interarea juga ingin diredam, maka nilai Tw harus dipilih dalam interval
10 sampai 20. Blok Lead/Lag
Lead-lag berfungsi sebagai penghasil karakteristik phase-lead yang sesuai
untuk mengkompensasi phasa-lag antara masukan eksitasi dan torsi generator.
3. Limiter
Output PSS dibatasi agar aksi PSS pada AVR sesuai dengan yang diharapkan. Sebagai contoh, pada saat terjadi pelepasan beban, AVR beraksi untuk mengurangi tegangan terminal generator pada saat PSS menghasilkan sinyal kontrol untuk menaikkan tegangan (karena kecepatan rotor generator bertambah besar pada saat pelepasan beban). Pada kondisi ini sangat diperlu-kan untuk menonaktifdiperlu-kan PSS. Hal ini menunjukdiperlu-kan pentingnya pembatasan nilai sinyal output PSS yang dapat dilakukan oleh blok limiter. Perlu diperhatikan bahwa, nilai batasan negatif yang tinggi dapat menggangu kestabilan swing pertama.
Secara umum, fungsi alih dari PSS dapat digambarkan dalam bentuk model linear yaitu:
55
s /(1+ s ) adalah sebuah faktor washout yang bekerja sebagai high-pass filter
dengan time lag . Faktor yang ada dalam kurung adalah sebuah lead compensation
untuk memperbaiki phase lag melalui sistem. Parameter-parameter A, B, C, D, dan
KSTAB ditala harga yang tidak berubah.
3.5 State Space sistem Tenaga Listrik
Secara umum sistem tenaga listrik dapat dinyatakan dalam persamaan state space berikut :
=
∆x
A
∆x+B
∆u ..………..(3.44)Keterangan :
x
∆ = n x 1 vektor keadaan
u
∆ = r x1 vektor input A = n x n matriks transition B = n x r matriks input
Sebagai contoh model yang terdiri dari n mesin, jika ditulis dalam variabel x dan u adalah sebagai berikut :
……….(3.45)
... (3.46) Dimana:
Y= Perubahan Level Katup (pu)
56
= Perubahan kecepatan sudut (pu)
= Perubahan sudut rotor (pu)
VA= Perubahan tegangan kearah eksitasi setelah dikuatkan (pu)
EFD= Perubahan tegangan medan (pu)
E’q= Perubahan tegangan generator (pu)
VF= Perubahan tegangan ke arah eksitasi setelah difilter (pu)
3.5.1 Sifat Eigen Pada Besaran Matriks
Kestabilan dapat dianalisis menggunakan beberapa cara, yaitu analisis eigenvalue, analisis Routh Hurwith dan lain-lain. Berikut ini, dipaparkan secara singkat mengenai analisis kestabilan menggunakan eigenvalue. Untuk analisis tersebut, diperlukan model matematik dari sistem yang dianalisis.
Bentuk umum dari problema eigen dinyatakan oleh persamaan yang dapat ditulis dalam bentuk matrix sebagai berikut:
A = ………(3.47)
Dimana:
A = matriks n x n
= vektor n x 1, ≠0
Untuk menentukan nilai eigen, maka persamaan (3.42) menjadi:
57
penyelesaian persamaan diatas memberikan akar-akar karakteristik sebanyak n yaitu = 1, 2, ………., n yang dikenal dengan nilai eigen matriks A. Nilai eigen
dapat berupa bilangan real atau kompleks.
3.5.2 Eigenvalue dan Stabilitas
Stabilitas sistem ditentukan dengan eigenvalue sebagai berikut:
1. Real eigenvalue berhubungan dengan mode non-oscillatory. Negatif real eigenvalue menunjukan mode yang stabil. Semakin besar magnitudenya, maka semakin cepat pula kestabilannya. Positif real eigenvalue menunjukan instabilitas pada waktu tertentu.
2. Bila eigenvalue merupakan bilangan kompleks, maka sistem dikatakan stabil jika bagian realnya bernilai negatif. Komponen real eigenvalue menghasilkan redaman, dan komponen imajiner menghasilkan frekuensi osilasi. Bagian negatif real menyatakan osilasi teredam, sedangkan bagian positif real menyatakan osilasi tak teredam dari amplitudo. Jadi untuk kompleks eigenvalue:
= ± j ………(3.50)
frekuensi osilasi dalam Hz adalah:
………(3.51)
ini menyatakan frekuensi redaman. Rasio redaman adalah sebagai berikut:
58
BAB IV
SIMULASI DAN ANALISIS
Dalam tugas akhir ini dilakukan simulasi dan membandingkan antara sistem tenaga listrik yang menggunakan power system stabilizer dengan yang tidak menggunakan power system stabilizer. Pengolahan data dan simulasi dikerjakan dengan menggunakan software MATLAB 7.01 . Algoritma penyelesaian Tugas Akhir, data, hasil simulasi dan analisis diuraikan dalam bab ini.
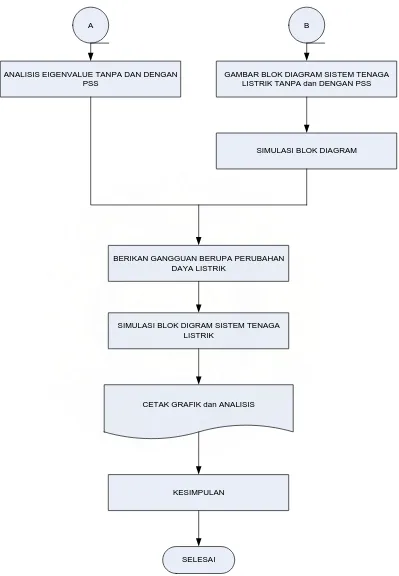
4.1 Algoritma
Langkah-langkah penyelesaian tugas akhir ini ditunjukkan pada gambar 4.1 dibawah ini.
START
MASUKAN DATA SALURAN, BEBAN, DAN PARAMETER MESIN
LOADFLOW
REDUKSI MATRIKS
PEMODELAN LINEAR SISTEM TENAGA LISTRIK
59
A B
ANALISIS EIGENVALUE TANPA DAN DENGAN PSS
GAMBAR BLOK DIAGRAM SISTEM TENAGA LISTRIK TANPA dan DENGAN PSS
SIMULASI BLOK DIAGRAM
BERIKAN GANGGUAN BERUPA PERUBAHAN DAYA LISTRIK
SIMULASI BLOK DIGRAM SISTEM TENAGA LISTRIK
CETAK GRAFIK dan ANALISIS
KESIMPULAN
SELESAI
60
4.1.1 Data
Dalam tugas akhir ini data saluran, beban dan parameter mesin diambil dari buku Power System Control and Stability (P.M Anderson dan A.A Fouad) dan Desain Sistem Tenaga Modern (Imam Robandi). Data saluran, Beban dan Parameter
mesin ditunjukkan pada tabel 1. dan tabel 2. Single line sistem tenaga listrik ditunjukkan pada gambar 4.2.
Tabel 1. Parameter Dinamik Mesin
Pembangkit Xd (pu)
Tabel 2. Parameter Dinamik Mesin
61
Tabel 3. Data Beban dan Pembangkitan
No Bus Jenis
Pembangkitan Konsumsi
P(MW) Q(Mvar) P(MW) Q(Mvar)
1 1 Generator 2494.00 637.79 1000.0 230.0
2 2 Generator 442.00 212.63 400.0 40.0
3 3 Generator 681.00 522.63 500.0 100.0
4 4 Beban - - 500.0 200.0
5 5 Beban - - 750.0 55.0
6 6 Beban - - 400.0 270.0
Tabel 4. Data Saluran Transmisi
No. Saluran R + j X (pu) Jarak(Km) 1 Bus 5 – Bus 6 0.0147 + j 0.1413 251.00 2 Bus 4 – Bus 6 0.0088 + j 0.0836 75.00 3 Bus 2 – Bus 5 0.0103 + j 0.1151 74.00 4 Bus 3 – Bus 5 0.0013 + j 0.0128 22.20 5 Bus 1 – Bus 2 0.0037 + j 0.0416 74.00
62
G1 G2
G3
BUS 1 BUS 2
BUS 3 BUS 5
BUS 4 BUS 6
Gambar 4.2 Single Line Diagram Sistem Tenaga Listrik
4.1.2. Aliran Daya (Loadflow)
Tujuan dari perhitungan aliran daya dalam kasus ini untuk mencari harga tegangan dan sudut pada tiap-tiap bus. Data tersebut digunakan untuk perhitungan re-duksi admitansi jaring dan parameter model linear multimesin.
4.1.3. Reduksi Matriks Admitansi Jaring
63
pembangkit). Diagram alir proses reduksi matriks admitansi jaring sistem tenaga listrik secara sederhana ditunjukkan pada Gambar 4.3.
Proses Reduksi
Matriks 3 x 3
Stop
Data saluran, beban
sistem dan Vbus
Start
Gambar 4.3 Flowchart Proses Reduksi Matriks Jaringan
4.1.4. Pemodelan Sistem
Sistem tenaga listrik dimodelkan ke dalam model linear multimesin. Dalam Tugas Akhir ini, PSS dipasang pada tiap-tiap pembangkit. Model linear multimesin dalam bentuk simulink ditunjukkan pada Lampiran.
4.2. Hasil Simulasi dan Analisis
Hasil perhitungan aliran daya digunakan sebagai inisialisasi dari model sistem tenaga listrik multimesin. Nilai tegangan dan sudut hasil perhitungan aliran daya di-tunjukkan pada Tabel 5.
64
Tabel 5. Tegangan dan Sudut Tiap-tiap Bus Hasil Aliran Daya
Bus Tegangan (p.u)
Sudut (0)
1 1.000 0.000 2 1.000 -0.033618
3 1.000 -0.12943 4 0.9364 -0.15232 5 0.9937 -0.13115 6 0.94001 -0.16585
Hasil perhitungan parameter interkoneksi ( K1 s.d K6) dengan program MATLAB ditunjukkan pada tabel 6.
Tabel 6. Parameter Interkoneksi
Parameter Interkoneksi
Nilai Parameter
Interkoneksi
Nilai
K1(11) 2.4939 K2(11) 0.6127
K1(12) 1.4729 K2(12) 0.2598
K1(13) 1.0357 K2(13) 0.1564
K1(21) 1.4271 K2(21) 0.3955
K1(22) 2.7246 K2(22) 0.8536
K1(23) 1.3181 K2(23) 0.2289
K1(31) 0.9015 K2(31) 0.4507
K1(32) 1.2114 K2(32) 0.4973
K1(33) 2.1127 K2(33) 1.2837
65
Parameter Interkoneksi
Nilai Parameter
Interkoneksi
Nilai
K4(11) 28.33 C3(11) 4.6241
K4(12) 14.411 C3(12) 2.0797
K4(13) 13.969 C3(13) 1.6774
K4(21) 10.115 C3(21) 1.5399
K4(22) 21.937 C3(22) 3.8308
K4(23) 11.841 C3(23) 1.6654
K4(31) 9.9288 C3(31) 0.91992
K4(32) 12.049 C3(32) 1.2797
K4(33) 21.975 C3(33) 3.8163
Parameter Interkoneksi
Nilai Parameter
Interkoneksi
Nilai
K4(11) 0.8024 C3(11) 4.4441
K4(12) 0.5014 C3(12) 2.0123
K4(13) 0.3018 C3(13) 1.4225
K4(21) 0.5735 C3(21) 1.4648
K4(22) 0.9050 C3(22) 3.8008
K4(23) 0.3319 C3(23) 1.3912
K4(31) 0.6535 C3(31) 0.9302
K4(32) 0.7211 C3(32) 1.2786
66
Parameter Interkoneksi
Nilai Parameter
Interkoneksi
Nilai
K5(11) 0.2623 K6(11) 1.6433
K5(12) 0.1595 K6(12) 0.2892
K5(13) 0.1044 K6(13) 0.2060
K5(21) 0.1620 K6(21) 0.2296
K5(22) 0.2740 K6(22) 1.6107
K5(23) 0.1139 K6(23) 0.2245
K5(31) 0.1486 K6(31) 0.1405
K5(32) 0.1695 K6(32) 0.1978
K5(33) 0.3180 K6(33) 1.5584
Parameter Interkoneksi
Nilai
K3(11) 0.2250 K3(22) 0.2631
K3(33) 0.2892
Matriks admitansi jaringan 6 x 6 sebelum direduksi ditunjukkan di bawah ini:
Ybus=
67
Matriks reduksi dan parameter-parameter interkoneksi digunakan untuk mencari matriks A sistem yang berordo 18 x 18 (Matriks State Space). Eigenvalue hasil simulasi matriks A sebelum dipasang PSS ditunjukkan pada tabel 7.
Tabel 7. Nilai eigen sebelum dipasang PSS.
Eigenvalue Frekuensi Osilasi Damping Ratio
-102.85 + 0.031292i 0.0049803 1
-102.02 + 0.01902i 0.0030272 0.99199
-102.02 + 0.0077361i 0.0012312 0.992
-13.256 + 42.767i 6.8065 0.12889
-12.022 + 39.265i 6.2493 0.11689
-11.098 - 43.978i 6.9993 0.10791
-9.0449 - 39.116i 6.2255 0.087945
-14.342 + 21.937i 3.4914 0.13945
-11.006 - 22.443i 3.572 0.10701
-5.0331 + 17.63i 2.806 0.048938
-4.4011 + 15.49i 2.4654 0.042793
-1.7093 + 14.575i 2.3197 0.01662
3.9833 - 15.486i 2.4647 -0.03873
2.4884 - 13.693i 2.1793 -0.024195
-1.2031 - 14.599i 2.3234 0.011698
-9.2882e-016 +2.2241e-016i 3.5397e-017 9.0311e-018
-1.462 - 2.351i 0.37417 0.014216
-1.15 - 1.7891i 0.28475 0.011182
68
parameter PSS yang digunakan pada tiap-tiap pembangkit ditunjukkan pada tabel 8. Parameter PSS dicari dengan metode trial error yang merujuk pada power system stabilizer merk Mitsubishi (pada lampiran).
Tabel 8. Parameter PSS
Pembangkit KPSS TW T1 T3 T2 T4
Generator 1 0.2 1 0.02 0.02 0.1 0.1 Generator 2 3 1 0.1 0.1 0.02 0.02 Generator 3 0.2 1 0.02 0.02 0.1 0.1
Tabel 9. Nilai eigen sistem setelah digunakan PSS
Eigenvalue Frekuensi Osilasi Damping Ratio
-102.85 + 0.031515i 0.0050157 1
-102.02 + 0.01902i 0.0030272 0.99199
-102.02 + 0.0077357i 0.0012312 0.992
-50.689 + 0.25817i 0.041089 0.49286
-49.309 - 0.26188i 0.041679 0.47944
-13.256 + 42.767i 6.8065 0.12889
-12.023 + 39.267i 6.2495 0.1169
-11.098 - 43.978i 6.9993 0.10791
69
-14.332 + 21.944i 3.4925 0.13935
-11.011 - 22.451i 3.5732 0.10706
-5.0368 + 17.63i 2.8059 0.048974
-4.4008 + 15.49i 2.4654 0.04279
-1.7108 + 14.576i 2.3198 0.016635
Eigenvalue Frekuensi Osilasi Damping Ratio
-3.9819 - 15.484i 2.4643 0.038716
-2.4886 - 13.693i 2.1793 0.024197
-1.2034 - 14.596i 2.3231 0.011701
-3.4811e-007 +1.0872e007i 1.7304e-008 3.3847e-009
-1.462 - 2.351i 0.37418 0.014216
-1.15 - 1.7891i 0.28475 0.011182
-10.005 + 0.0011257i 0.00017915 0.097282 -10.008 + 0.0051069i 0.00081279 0.097307 -9.9948 - 0.0011246i 0.00017899 0.09718 -9.9922 - 0.0051005i 0.00081178 0.097156 -0.99999 -1.5942e-005i 2.5372e-006 0.0097231
70
Dari tabel 7. Dan tabel 9. Terlihat bahwa Eigenvalue sistem yang menggunakan PSS lebih negatif daripada yang tidak menggunakan PSS. Ini menandakan sistem yang menggunakan PSS lebih stabil dari pada sistem yang tidak menggunakan PSS.
Respon frekuensi, dan tegangan pada tiap-tiap generator sebelum dan sesudah menggunakan PSS, ditunjukkan pada gambar-gambar di bawah ini. Kurva yang berwarna hijau menunjukkan respon tegangan atau frekuensi sebelum menggunakan PSS. Kurva yang berwarna ungu menunjukkan respon tegangan atau frekuensi setelah menggunakan PSS. Sumbu y menunjukkan amplitudo variasi tegangan atau frekuensi dalam pu. Sumbu x menunjukkan waktu dalam sekon.
Amplitudo Osilasi Tegangan
(pu)
Waktu (sekon)
71
Waktu (sekon)
Amplitudo Osilasi Frekuensi
(pu)
Gambar 4.5 Respon Frekuensi Generator 1
Amplitudo Osilasi Tegangan
(pu)
Waktu (sekon)
72
Amplitudo Osilasi Frekuensi
(pu)
Waktu (sekon)
Gambar 4.7 Respon Frekuensi Generator 2
Amplitudo Osilasi Tegangan
(pu)
Waktu (sekon)
73
Amplitudo Osilasi Frekuensi
(pu)
Waktu (sekon)
Gambar 4.9 Respon Frekuensi Generator 3
Dari hasil simulasi terlihat bahwa sistem yang menggunakan PSS lebih cepat stabil dari pada yang tidak menggunakan PSS. Secara terperinci respon tegangan dan frekuensi terhadap waktu kestabilan ditunjukkan pada tabel 10. Di bawah ini.
Tabel 10. Hasil Analisa Sebelum Diberi Gangguan
Tanpa PSS Dengan PSS
Waktu Stabil (sekon) Waktu Stabil (sekon) Tegangan Frekuensi Tegangan Frekuensi
Generator 1 8 6 4.5 5
Generator 2 6 7 4.8 4.8
74
Kemudian sistem diberi gangguan yaitu perubahan daya berupa kenaikan konsumsi daya sebesar 0.2 pu pada bus generator 2. Respon tegangan dan frekuensi pada masing-masing generator ditunjukkan pada gambar-gambar di bawah ini. Kurva yang berwarna hijau menunjukkan respon tegangan atau frekuensi sebelum menggunakan PSS. Kurva yang berwarna ungu menunjukkan respon tegangan atau frekuensi setelah menggunakan PSS. Sumbu y menunjukkan amplitudo variasi tegangan atau frekuensi dalam pu. Sumbu x menunjukkan waktu dalam sekon.
Amplitudo Osilasi Tegangan
(pu)
Waktu (sekon)