PENDAHULUAN
Latar Belakang
Rumusan Masalah
Tujuan Penelitian
Manfaat Penelitian
TINJAUAN PUSTAKA
Kajian Pustaka
Sistem kontrol logika fuzzy yang bekerja berdasarkan sistem komputer mikro disebut Advanced Fuzzy Logic Power Supply System Stabilizer (AFLPSS). Penggunaan sistem kendali logika fuzzy pada sistem eksitasi akan mengakumulasi kinerja PSS dari Hoang et al (1996). Pada penelitian ini, sistem adaptif berbasis logika fuzzy digunakan untuk mengatur parameter konstanta gain proporsional, derivatif, dan integral.
Kemudian dari hasil penelitian ini diperoleh perbandingan hasil antara sistem PSS dengan PID konvensional yang diatur berdasarkan aturan Ziegler-Nichols, dan PID adaptif yang didasarkan pada logika fuzzy dengan menggunakan lima keanggotaan. fungsi.
Stabilitas Sistem Tenaga Listrik
Penggunaan model sistem multi mesin dengan teknik tuning otomatis menggunakan algoritma genetika untuk merancang bobot matriks dan fungsi keanggotaan aturan fuzzy pada PSS dengan masukan berupa perubahan kecepatan rotor dan perubahan daya listrik dilakukan oleh Robandi (2002). . Hasil yang diperoleh adalah algoritma genetika dapat mengoptimalkan fungsi keanggotaan aturan logika fuzzy, namun model ini kurang cocok jika diterapkan pada sistem adaptif karena membutuhkan waktu yang cukup lama untuk proses pembelajaran sistem.
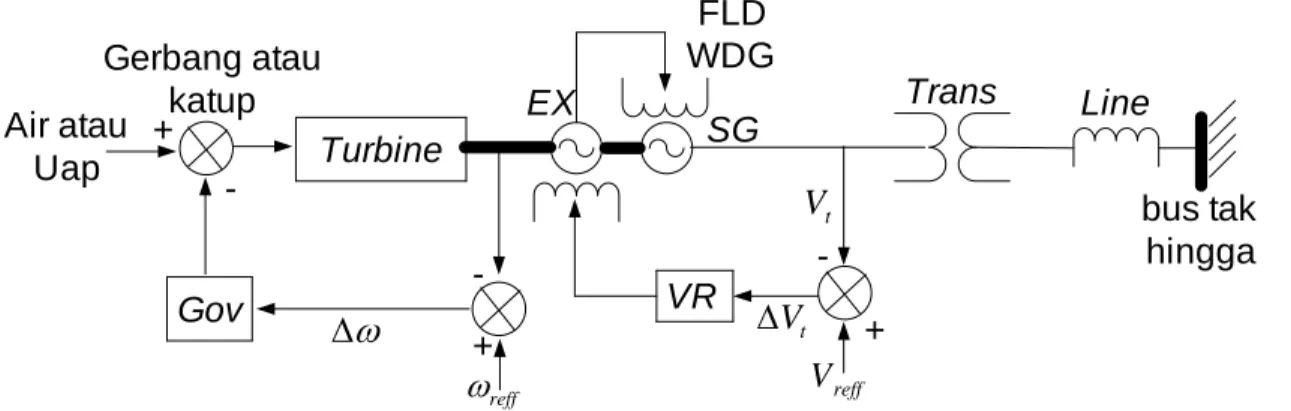
Komponen Dasar Sistem Tenaga Listrik
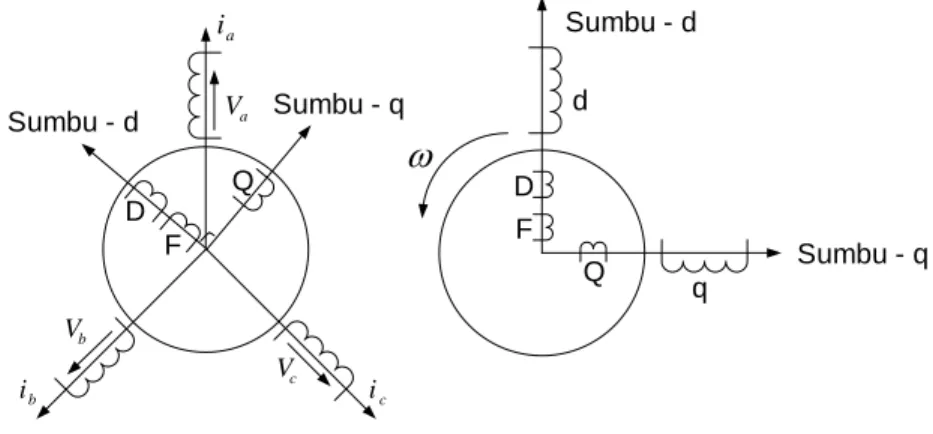
Pemodelan Generator Sinkron Tiga Fase
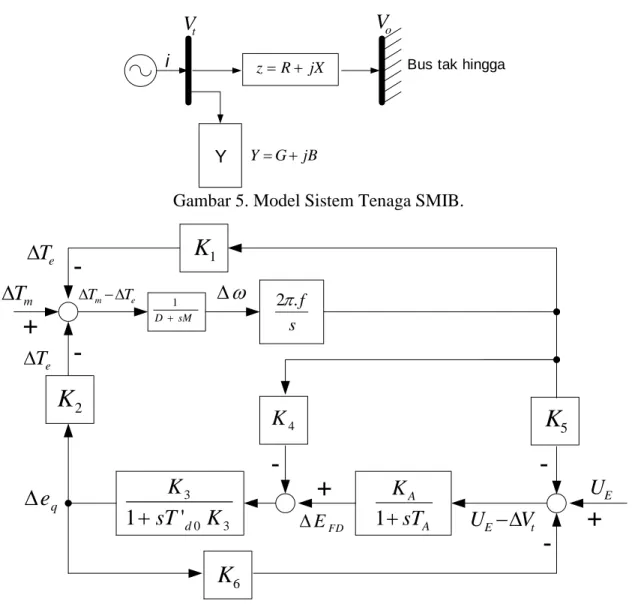
Sistem Tenaga Single Machine Infinite Bus (SMIB)
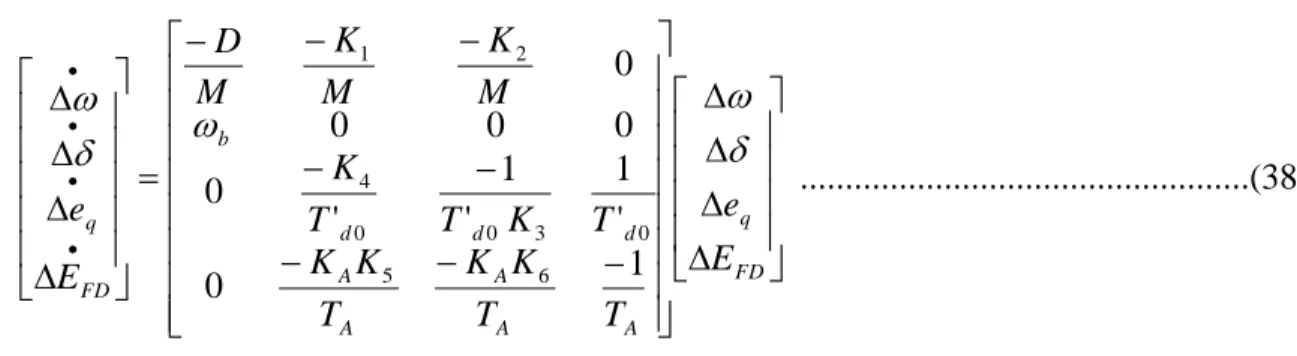
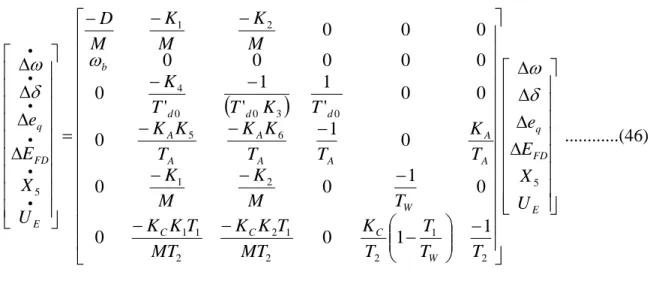
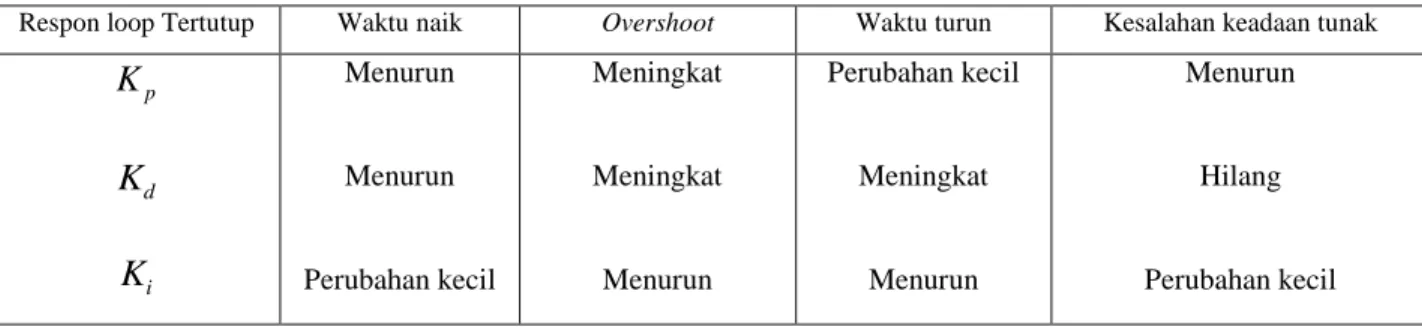
K perubahan tegangan terminal Vt untuk perubahan kecil pada sudut rotor dengan fluks kopel sumbu-d tetap. K perubahan tegangan terminal Vt untuk perubahan kecil pada fluks kopel sumbu-d dengan sudut rotor tetap. Sinyal listrik ini memiliki kontrol tambahan UE dikurangi perubahan tegangan terminal Vt sebagai input dan perubahan internal eq sebagai output.
Hubungan fasor antara arus jangkar i, tegangan terminal Vt, tegangan bus tak terhingga V0 dan tegangan internal eq' pada Gambar 5 dapat dinyatakan seperti pada Gambar 7.
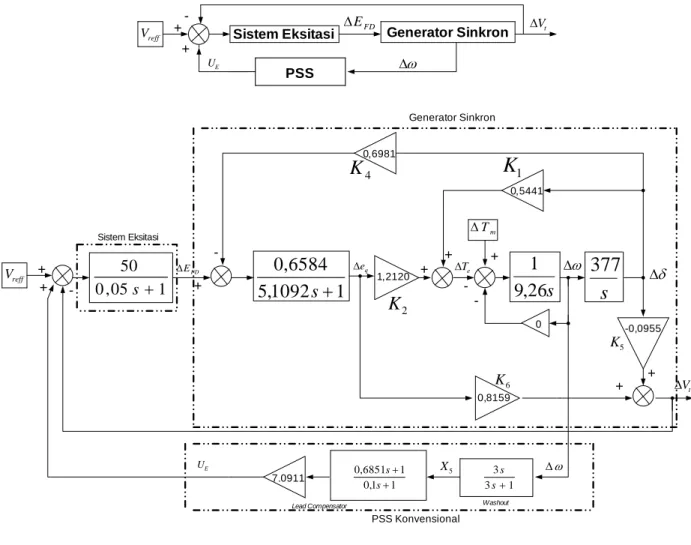
Kendali Power System Stabilizer (PSS)
Karena ada penundaan fase 1sta dan 1sT'd0K3 untuk s jn , lead kompensator fase harus disertakan dalam desain sistem eksitasi sehingga torsi redaman TE sama sefasa dengan pada frekuensi osilasi . Tentukan fungsi transfer GE untuk jalur maju sistem tenaga, yaitu fungsi transfer dari keluaran PSS ke torsi listrik.
Kendali Proportional Integral Derivative (PID)
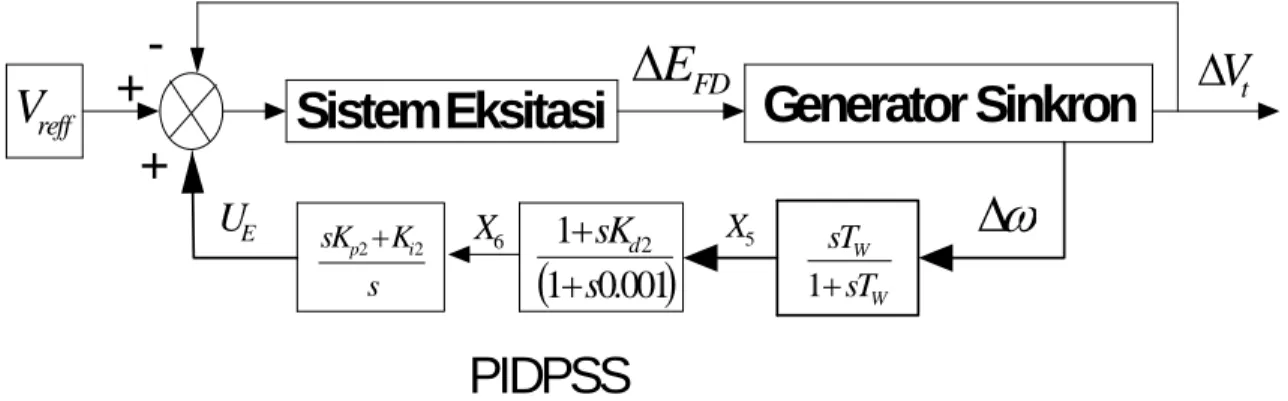
- Pengendali PIDPSS
- Fungsi alih PIDPSS
Kontrol proporsional (Kp) akan memiliki efek mengurangi waktu naik, tetapi tidak menghilangkan kesalahan keadaan tunak. Kontrol integral (Ki) akan memiliki efek mengoreksi kesalahan keadaan tunak, tetapi akan menyebabkan degradasi respons transien. Regulasi turunan (Kd) akan memberikan efek peningkatan stabilitas sistem, pengurangan overshoot dan peningkatan respon transmisi.
Hubungan korelasi dalam tabel mungkin tidak sepenuhnya akurat karena Kp, Ki, dan Kd saling bebas.
Pengendali Logika Fuzzy
- Unit Fuzifikasi
- Unit Aturan Fuzzy (Fuzzy Rule Base)
- Unit Inferensi Fuzzy / Unit Penarik Kesimpulan (fuzzy Inference
- Metode Max-Min
- Metode Max-Dot
- Unit Defuzifikasi
- Metode Rerata Maksimum (Mean of Max, MOM)
- Metode Pusat Area (Centre of Area, COA)
- Metode Sugeno
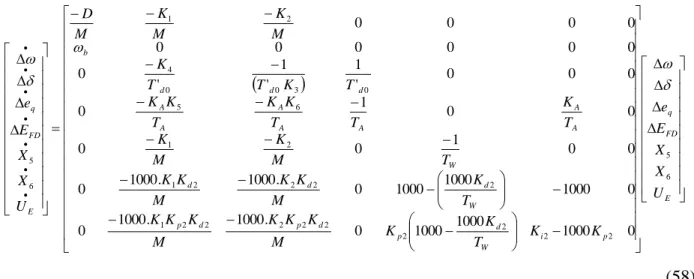
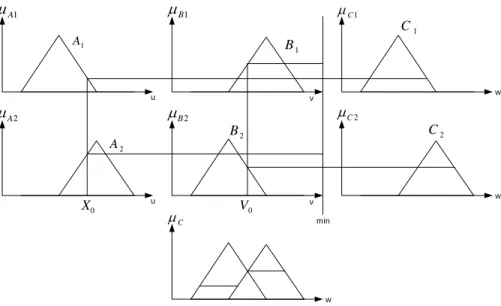
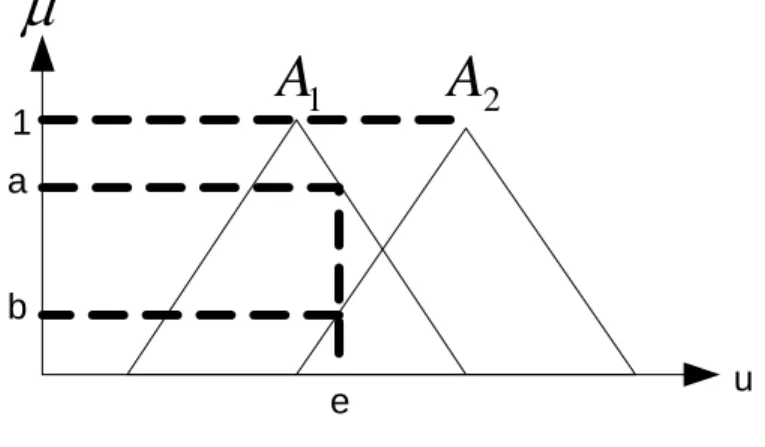
Pada Gambar 12 terlihat bahwa sinyal e mengalami fuzzifikasi menjadi besaran fuzzy A1 dengan derajat keanggotaan dan besaran fuzzy A2 dengan derajat keanggotaan b. U sedangkan himpunan fuzzy B pada semesta pembahasan adalah V, maka fungsi unit pengolah fuzzy adalah memetakan himpunan fuzzy A pada U ke himpunan fuzzy B pada V sesuai dengan aturan fuzzy yang telah ditetapkan. Metode ini adalah prosedur paling sederhana untuk memilih nilai keluaran atau aksi kontrol, v0 , yang memaksimalkan fungsi keanggotaan.
Algoritma MOM ini mengabaikan fungsi keanggotaan keluaran, tetapi dapat menyederhanakan proses defuzzifikasi keluaran defuzzifikasi w0, hanya bergantung pada titik perpotongan masukan, dan bukan pada bentuk fungsi keanggotaan.
METODE PENELITIAN
Diagram Alir Penelitian
Bahan Penelitian
Jalan Penelitian
- Perhitungan Parameter Sistem Tenaga Listrik SMIB dan
- Perhitungan dan Penentuan Parameter Blok Diagram PIDPSS
- Penyusunan Model Fuzzy Inference System (FIS) pada
- Proses Fuzifikasi pada Pengendali FPIDPSS
- Proses Penalaran Aturan (rule) dan Defuzifikasi
- Pelatihan dan Analisis Hasil Penelitian Simulasi Pengendali
Penurunan waktu setup pada PIDPSS dari 6,4 detik menjadi 3,45 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 46,09% dibandingkan dengan PSS konvensional. Penurunan waktu setup pada PIDPSS dari 6,95 detik menjadi 3,8 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 45,32% dibandingkan dengan PSS konvensional. Penurunan waktu setup pada PIDPSS dari 6,4 detik menjadi 3,4 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 46,88% dibandingkan dengan PSS konvensional.
Pengurangan settling time pada PIDPSS dari 6,05 detik menjadi 3,1 detik dibandingkan dengan PSS konvensional, sehingga menurunkan PIDPSS sebesar 48,76% dibandingkan dengan PSS konvensional. Pengurangan settling time pada PIDPSS dari 4,3 detik menjadi 3,6 detik dibandingkan dengan PSS konvensional, sehingga menurunkan PIDPSS sebesar 16,28% dibandingkan dengan PSS konvensional. Kemudian FPIDPSS mengalami penurunan settling time dari 3,6 detik menjadi 2,9 detik - 2,3 detik dibandingkan PIDPSS dan penurunan settling time dari 4,3 detik menjadi 2,9 detik - 2,3 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan yang sama dengan dibandingkan dengan PIDPSS dan pengurangan dibandingkan dengan PSS konvensional.
Penurunan settling time pada PIDPSS dari 5,05 detik menjadi 2,1 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 58,42% dibandingkan dengan PSS konvensional. Penurunan setting time pada PIDPSS dari 4,3 detik menjadi 2,9 detik dibandingkan PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 32,56% dibandingkan PSS konvensional. Penurunan setting time pada PIDPSS dari 5,1 detik menjadi 3,7 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 22,45% dibandingkan dengan PSS konvensional.
Kemudian FPIDPSS mengalami penurunan settling time dari 3,7 detik menjadi 3,3 detik – 2,3 detik dibandingkan PIDPSS dan penurunan settling time dari 5,1 detik menjadi 3,3 detik – 2,3 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan sebesar 10,81%. Pengurangan settling time pada PIDPSS dari 5 detik menjadi 2,9 detik dibandingkan PSS konvensional, sehingga PIDPSS berkurang 42% dibandingkan PSS konvensional.
HASIL DAN PEMBAHASAN
Tanggapan Dinamis Sistem Pada Saat Keadaan Awal
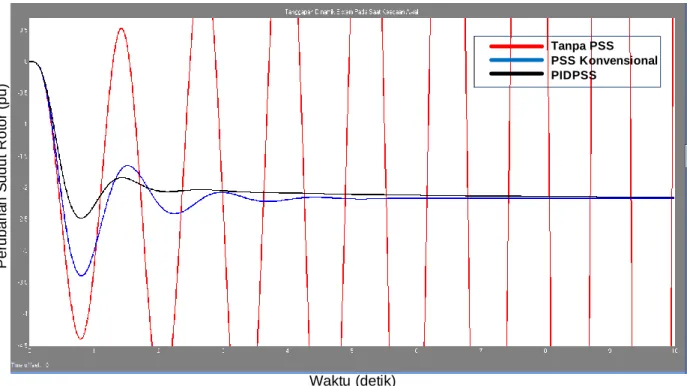
Perubahan kecepatan rotor pada PIDPSS yang ditunjukkan pada Gambar 22 mengalami penurunan overshoot dari 0,00672 pu menjadi 0,003 pu dibandingkan dengan PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 55,36% dibandingkan dengan PSS konvensional. Kemudian FPIDPSS mengalami penurunan settling time dari 3,45 detik menjadi 3,4 detik - 2,7 detik dibandingkan PIDPSS dan penurunan settling time dari 6,4 detik menjadi 3,4 detik - 2,7 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan 3,4 detik ke PSS normal. Perubahan sudut rotor pada PIDPSS seperti pada Gambar 23 menurunkan overshoot dari 0,34 pu menjadi 0,0905 pu dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 73,38% dibandingkan dengan PSS biasa.
Selanjutnya FPIDPSS mengalami penurunan waktu setup dari 3,8 detik menjadi 3,7 detik – 3,1 detik vs PIDPSS dan penurunan waktu setup dari 6,95 detik menjadi 3,7 detik – 3,1 detik vs PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan 3,7 detik dibanding PSS konvensional. Perubahan tegangan terminal Vt pada PIDPSS yang ditunjukkan pada Gambar 24 telah menurunkan overshoot dari 0,1617 pu menjadi 0,1078 pu dibandingkan PSS konvensional, mengurangi PIDPSS sebesar 33,33% dibandingkan dengan PSS konvensional. Selanjutnya FPIDPSS mengalami penurunan waktu setup dari 3,4 detik menjadi 3,3 detik – 2,6 detik vs PIDPSS dan penurunan waktu setup dari 6,4 detik menjadi 3,3 detik – 2,6 detik vs PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan 3,3 detik dibanding PSS konvensional.
Perubahan daya listrik Te pada PIDPSS seperti terlihat pada Gambar 25 telah menurunkan overshoot dari 0,195 pu menjadi 0,091 pu dibandingkan PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 53,33% dibandingkan dengan PSS konvensional. Selanjutnya FPIDPSS mengalami penurunan waktu setup dari 3,1 detik menjadi 3,05 detik – 2,8 detik vs PIDPSS dan penurunan waktu setup dari 6,05 detik menjadi 3,05 detik – 2,8 detik vs PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan 3,05 detik dibanding PSS konvensional.
Pengujian Gangguan Kenaikan Daya Elektrik
Penurunan waktu setup pada PIDPSS dari 4,85 detik menjadi 2,45 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 49,48% dibandingkan dengan PSS konvensional. Selanjutnya FPIDPSS mengalami penurunan waktu setup dari 2,45 detik menjadi 2,4 detik – 1,6 detik vs PIDPSS dan penurunan waktu setup dari 5,8 detik menjadi 3,4 detik – 3,18 detik vs PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan sebesar 3,18 dibandingkan dengan PSS konvensional. Penurunan waktu setup pada PIDPSS dari 4 detik menjadi 2,95 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 26,25% dibandingkan dengan PSS konvensional.
Kemudian FPIDPSS mengalami penurunan waktu settling dari 2,95 detik menjadi 2,8 detik - 2 detik dibandingkan PIDPSS dan penurunan settling time dari 4 detik menjadi 2,8 detik - 2 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan sebesar 30% - 50% terhadap PSS konvensional. Perubahan daya listrik Te pada PIDPSS seperti terlihat pada Gambar 29 mengalami penurunan overshoot dari 0,05 pu menjadi 0,024 pu terhadap PSS konvensional, sehingga PIDPSS mengalami penurunan sebesar 52% dibandingkan PSS konvensional. Kemudian, FPIDPSS mengalami penurunan waktu settling dari 2,1 detik menjadi 2 detik - 1,8 detik dibandingkan PIDPSS dan penurunan settling time dari 5,05 detik menjadi 2 detik - 1,8 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan sebesar terhadap PIDPSS dan penurunan sebanyak terhadap PSS konvensional.
Perubahan kecepatan rotor pada PIDPSS, seperti yang ditunjukkan pada Gambar 30, mengurangi overshoot dari 0,00128 pu menjadi 0,00064 pu relatif terhadap PSS konvensional, mengurangi PIDPSS sebesar 50% dibandingkan dengan PSS konvensional. Selanjutnya FPIDPSS mengalami penurunan waktu setup dari 2,9 detik menjadi 2,5 detik – 1,65 detik vs PIDPSS dan penurunan waktu setup dari 4,3 detik menjadi 2,5 detik – 2,65 detik vs PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan 2,5 detik dari PSS konvensional. Penurunan waktu setup pada PIDPSS dari 4,45 detik menjadi 2,95 detik dibandingkan dengan PSS konvensional, sehingga PIDPSS berkurang sebesar 33,71% dibandingkan dengan PSS konvensional.
Kemudian FPIDPSS mengalami penurunan waktu dropout dari 2,95 detik menjadi 2,3 detik – 1,6 detik dibandingkan dengan PIDPSS dan penurunan waktu dropout dari 4,45 detik menjadi 2,3 detik – 1,6 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan sebanyak dibandingkan dengan PIDPSS dan ' penurunan sebanyak terhadap PSS konvensional. Kemudian FPIDPSS mengalami penurunan waktu dropout dari 2,9 detik menjadi 2,45 detik – 1,6 detik dibandingkan PIDPSS dan penurunan waktu dropout dari 5,8 detik menjadi 3,4 detik – 3,1 detik dibandingkan PSS konvensional, sehingga FPIDPSS mengalami penurunan PIDPSS dan penurunan sebesar 51 % - 68% terhadap PSS konvensional.
Pengujian Gangguan Penurunan Daya Elektrik
PENUTUP
Kesimpulan
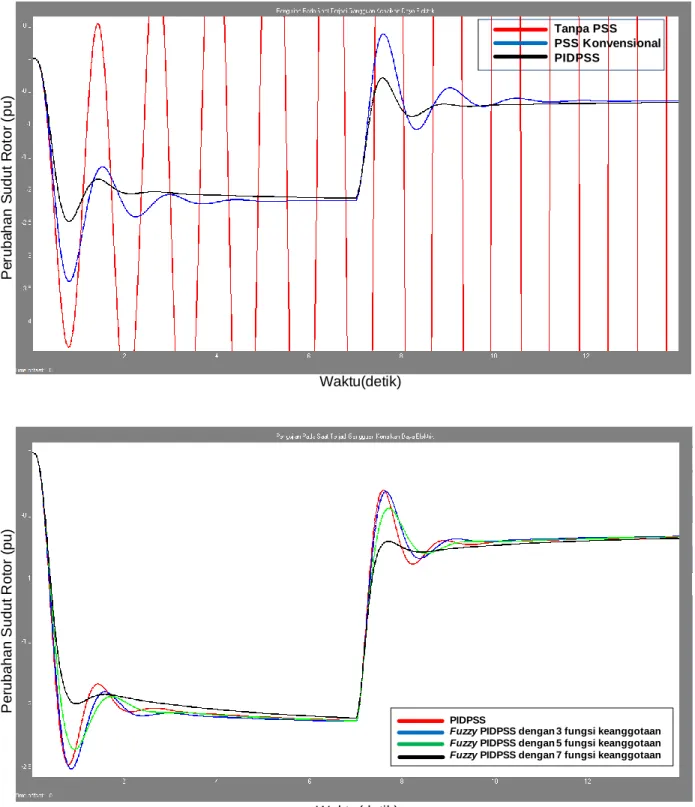
Kemudian penerapan kontroler logika fuzzy Proportional Integral Derivative (FPID) untuk meningkatkan kestabilan dinamik pada sistem SMIB dapat memberikan kinerja redaman osilasi yang lebih baik lagi dibandingkan dengan kontroler PIDPSS. Pada penelitian ini, kontroler logika fuzzy dengan total tujuh fungsi keanggotaan dapat menghasilkan hasil yang lebih baik dibandingkan dengan kontroler logika fuzzy yang menggunakan lima dan tiga fungsi keanggotaan. Namun untuk kecepatan waktu komputasi, kontroler logika fuzzy dengan total tujuh fungsi keanggotaan lebih lama dibandingkan dengan kontroler logika fuzzy dengan fungsi keanggotaan lima dan tiga.
Hiyama, T., Kugimiya, M., dan Satoh, H., (1994, September), Advanced PID Type Fuzzy Logic Power System Stabilizer, IEEE Transactions on Power Conversion, Vol. Hiyama, T., (1994, September), Robustness of Fuzzy Logic Power System Stabilizers Applied to Multimachine Power System, IEEE Transactions on Energy Conversion, vol. Hoang, P., dan Tomsovic, K., (1996, June), Design and Analysis of a Fuzzy Adaptive Power System Stabilizer, IEEE Transactions on Energy Conversion, vol.
Hsu, Y., Y., (1987, September), Design of self-tuning PID power system stabilizers for a synchronous generator, IEEE Transactions on Energy Conversion, vol. Kim, D., dan Rhee, S., (2001, June), Designing an Optimal Fuzzy Logic Controller Using Response Surface Methodology, IEEE Transactions on Fuzzy Systems, vol. Li, W., (1998, November), Design of a Hybrid Fuzzy Logic Proportional Plus Conventional Integral Derivative Controller, IEEE Transactions on Fuzzy Systems, vol.
Robandi, I., (2002, Oktober), Aturan Fuzzy dan Strategi Penyetelan Otomatis Matriks Berat pada Fuzzy Logic Optimal Power System Stabilizer Menggunakan Algoritma Genetika, Seminar Sistem Tenaga III, Institut Teknologi Sepuluh Nopember, Surabaya, hal. Toliyat, H., A., Sadeh, J., dan Ghazi, R., (1996, Maret), Merancang stabilisator sistem tenaga dengan logika fuzzy yang diperluas untuk meningkatkan stabilitas sistem tenaga, IEEE Transaction on Energy Conversion, vol. Wakimin, (2001), Studi Stabilizer Sistem Tenaga PID Berbasis Logika Fuzzy, Skripsi, Jurusan Teknik Elektro, Fakultas Teknik, Universitas Gadjah Mada, Yogyakarta.
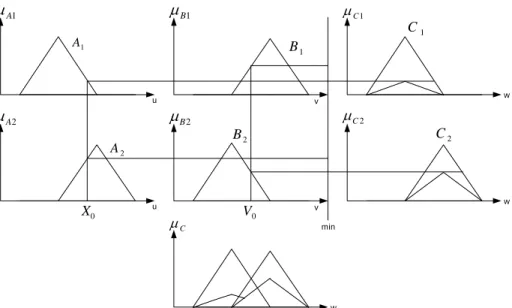
Namun setelah dihitung ternyata nilai invers dari matriks A di atas tidak dapat kita peroleh, sehingga nilai x1 sampai x9 dari matriks A.x = C di atas tidak dapat kita selesaikan dan kita tidak dapat menggunakan kontroler logika fuzzy dengan segitiga fungsi keanggotaan.
Saran