PERANCANGAN ALAT PENGUKUR KEKERUHAN AIR DENGAN MENGGUNAKAN ATmega8535
TUGAS AKHIR
SRI WAHYUNI NASUTION NIM : 112411005
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN ALAT PENGUKUR KEKERUHAN AIR DENGAN MENGGUNAKAN ATmega8535
TUGAS AKHIR
Diajukan untuk melengkapi dan memenuhi syarat mencapai gelar ahlimadya
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : PERANCANGAN ALAT PENGUKUR KEKERUHAN AIR DENGAN MENGGUNAKAN ATmega8535 Kategori : Tugas Akhir
Nama : Sri Wahyuni Nasution
NIM : 112411005
Program Studi : D-III Metrologi dan Instrumentasi Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam (MIPA) Universitas
Sumatera Utara
Diluluskan di Medan, Juli 2014
Komisi Pembimbing :
Diketahui/Disetujui oleh
Ketua Jurusan D3 Metrologi dan Instrumentasi Pembimbing, FMIPA USU,
NIP. 196607291992032002 NIP. 195507061981021002
PERANCANGAN ALAT PENGUKUR KEKERUHAN AIR DENGAN MENGGUNAKAN ATmega8535
TUGAS AKHIR
Saya mengakui bahwa Tugas akhir ini adalah hasil kerja saya sendiri kecuali beberapa kutipan dan ringkasan yang masing- masing di sebutkan sumbernya.
Medan, Juli 2014
NIM. 112411005 Sri Wahyuni Nasution
PENGHARGAAN
sehingga dapat menyelesaikan Skripsi ini dengan baik. Shalawat dan Salam kepada Nabi Muhammad SAW semoga kita mendapatkan safa’atnya di kemudian hari. Amin
Dalam kesempatan ini penulis menyampaikan rasa hormat dan ucapan terima kasih yang sebesar- besarnya kepada keluarga serta orang- orang yang mendukung sehingga penulis dapat menyelesaikan proyek ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Abdul Kholid Nasution dan Ibunda Helni Wati, terima kasih atas kasih sayang dan kepercayaan yang telah kalian berikan kepada anak kalian ini, , terimakasih buat dukungannya, doa dan motivasi yang diberikan dari awal mulai perkuliahan sampai penulisan skripsi ini serta buat seluruh keluarga yang telah membantu, mendukung dan memberikan kelonggaran serta support terhadap pendidikan saya hingga bisa berkembang seperti sekarang.
2. Yth.Bapak Dekan Dr.Sutarman beserta jajarannya di lingkungan FMIPA USU
3.
Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam dan selaku dosen pembimbing penulis dalam penyelesaian Tugas akhir ini. Penulis sangat berterima kasih untuk setiap bimbingan, masukan , saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian skripsi ini .
4. Bap
Studi Fisika Fakultas Matematika Dan Ilmu Pengetahuan Alam.
5. Kepada bang Oki Handinata alumni Fisika USU 2007 yang telah memeberi banyak motivasi dan pembelajaran dalam menyelesaikan tugas akhir saya.
6. Teman–teman seperjuangan yang telah banyak membantu dalam proses pengerjaan tugas akhir ini(kusus nya anak D3 metrologi dan Instrumentasi) 7. Kepada UKM robotic sikonek USU , kepada kawan kawan , abang abang, serta
adik adik yang telah memebantu saya.
8. dan kepada semua pihak yang telah berkontribusi dalam kehidupan penulis yang tidak mampu saya tuliskan satu persatu.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Juli 2014 Penulis,
ABSTRAK
Air yang keruh akan menyebabkan intensitas cahaya yang masuk kedalamnya berkurang. Dengan demikian tingkat kekeruhan air dapat dideteksi dengan alat pengukur intensitas cahaya. Kegiatan rancang bangun dilakukan dengan tujuan untuk menghasilkan alat yang dapat digunakan untuk mengukur tingkat kekeruhan air sebagai pemanfaatan piranti elektronika berupa fototransistor. Proses rancang bangun meliputi pembuatan rangkaian Op-Amp sederhana yang berfungsi sebagai penguat dan desain sistem sensor fototransistor yang bekerja berdasar prinsip
efekfotolistrik. Alat hasil kegiatan rancang bangun dikarakterisasi dengan melakukan kalibrasi. Caranya adalah dengan membandingkan besaran keluaran yang ditunjukkan oleh alat ukur, yaitu berupa tegangan, dengan hasil pengukuran intensitas cahaya yang dihasilkan oleh luxmeter. Ujicoba aplikasi alat untuk mengukur tingkat kekeruhan air dilakukan pada air yang dibuat keruh secara sengaja, yaitu dengan air aquades , air keran toilet dan minuman cocacola..Perubahan tegangan keluaran terhadap tingkat kekeruhan mengikuti pola eksponensial turun, sebagaimana terjadi pada banyak proses yang berlangsung secara alamiah. Cara pengukuran tingkat kekeruhan air dengan alat ini tidak dapat dilakukan oleh alat pengukur intensitas cahaya yang tidak resisten terhadap cairan, seperti luxmeter produk industri yang ada di Laboratorium Fisika USU. Sifat sistem sensornya yang permisif untuk dicelupkan ke dalam air dan biaya pembuatannya yang murah adalah di antara keunggulan dari alat ini selain hasil pengukuran yang baik.
DAFTAR ISI
BAB II LANDASAN TEORI 2.1 Hardware ... 6
2.2 Sensor Cahaya ... 9
2.3 Kapasitor ... 12
2.3.1 Kapasitor keramik ... 14
2.4 Resistor ... 19
2.5 Pengendali mikro dan mikrokontroller ... 23
2.6 Software ... 25
2.7 Codevision AVR ... 28
3.1 Rancangan system ... 30
3.2 Rancangan system elektronik ... 33
3.3 Tata letak komponen ... 35
3.4 Rangakaian mikrokontroller ATMega8535 ... 37
3.5 Rangkaian power supplay (PSA) ... 38
3.6 Saklar ... 39
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Pengujian Rangkaian Mikrokontroller ATMega8535 ... 40
4.2 Pengujian Rangkaian Power Supplay (PSA) ... 42
4.3 Pengujian sensor ... 43
4.4 Programming ... 44
4.5 Downloading ... 45
4.6 Hasil Pengujian dengan mengambil data dari 5 Responden(Pengguna ... 46
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 46
5.2 Saran ... 46
Gambar 1.2 Deskripsi Pin AT Mega 8535 ... 8
Gambar 1.3 Blok Diagram Fungsional ATmega8535 ... 10
Gambar 1.4 Konfigurasi Atmega 8535 ... 13
Gambar 1.5 Status Register ATMega8535 ... 13
Gambar 1.6 Prinsip kerja sensor cahaya ... 17
Gambar 1.7 Prinsip Pemantulan cahaya ... 18
Gambar 1.8 Rancangan Blog diagram ... 19
Gambar 1.9 Rancangan sistem Elektronik ... 20
Gambar 1.10 Tata letak komponen dan jalur pengawatan Pada PCB Mainboard ... 22
Gambar 1.11 Rangkaian Mikrokontroller ATmega8535 ... 22
Gambar 1.12 Rangkaian PSA ... 23
Gambar 1.13 Dimensi sensor Ultrasonic Pengujian LCD ... 27
Gambar 1.14 Sistem pengujian LCD ... 27
DAFTAR TABEL Tabel 1.1 Tabel port b ... 21
Tabel 1.2 Tabel port d ... 21
ABSTRAK
Air yang keruh akan menyebabkan intensitas cahaya yang masuk kedalamnya berkurang. Dengan demikian tingkat kekeruhan air dapat dideteksi dengan alat pengukur intensitas cahaya. Kegiatan rancang bangun dilakukan dengan tujuan untuk menghasilkan alat yang dapat digunakan untuk mengukur tingkat kekeruhan air sebagai pemanfaatan piranti elektronika berupa fototransistor. Proses rancang bangun meliputi pembuatan rangkaian Op-Amp sederhana yang berfungsi sebagai penguat dan desain sistem sensor fototransistor yang bekerja berdasar prinsip
efekfotolistrik. Alat hasil kegiatan rancang bangun dikarakterisasi dengan melakukan kalibrasi. Caranya adalah dengan membandingkan besaran keluaran yang ditunjukkan oleh alat ukur, yaitu berupa tegangan, dengan hasil pengukuran intensitas cahaya yang dihasilkan oleh luxmeter. Ujicoba aplikasi alat untuk mengukur tingkat kekeruhan air dilakukan pada air yang dibuat keruh secara sengaja, yaitu dengan air aquades , air keran toilet dan minuman cocacola..Perubahan tegangan keluaran terhadap tingkat kekeruhan mengikuti pola eksponensial turun, sebagaimana terjadi pada banyak proses yang berlangsung secara alamiah. Cara pengukuran tingkat kekeruhan air dengan alat ini tidak dapat dilakukan oleh alat pengukur intensitas cahaya yang tidak resisten terhadap cairan, seperti luxmeter produk industri yang ada di Laboratorium Fisika USU. Sifat sistem sensornya yang permisif untuk dicelupkan ke dalam air dan biaya pembuatannya yang murah adalah di antara keunggulan dari alat ini selain hasil pengukuran yang baik.
BAB I
PENDAHULUAN
1.1
Latar BelakangAir adalah senyawa yang penting bagi semua bentuk kehidupan yang diketahui sampai saat ini di bumi, tetapi tidak di planet lain. Air menutupi hampir 71% permukaan bumi. Air bersih penting bagi kehidupan manusia.
Namun air banyak mendapat pencemaran baik dari sumber domestik maupun non domestik. Semua bahan pencemar tersebut secara langsung ataupun tidak langsung akan mempengaruhi kualitas air. Adanya pencemar ini dapat menyebabkan kekeruhan pada air. Kekeruhan pada air dalam istilah teknik biasanya disebut dengan turbiditas. Kekeruhan adalah keadaan buram atau kekaburan dari cairan yang disebabkan oleh partikel individu (padatan tersuspensi) yang umumnya tidak terlihat dengan mata telanjang, mirip dengan asap di udara. Pengukuran kekeruhan adalah tes kunci dari kualitas air. Kekeruhan dalam air permukaan dapat disebabkan oleh pertumbuhan fitoplankton, kegiatan manusia yang mengganggu tanah, seperti konstruksi dapat menyebabkan tingkat sedimen yang tinggi ketika memasuki perairan selama musim hujan karena limpasan air hujan sehingga menciptakan kondisi keruh.
1.2 RUMUSAN MASALAH
Berbagai uraian yang telah ada maka penelitian ini diarahkan pada permasalahan berikut:
1. Rancang bangun alat ukur kekeruhan air berbasis mikrokontroler Atmega 8535 dengan interface tampilan LCD
2. Perancangan program database menggunakan RS 232
1.3 BATASAN MASALAH
Mengingat keterbatasan waktu dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini. Adapun permasalahan ini adalah :
1. Mengetahui bagaimana prinsif kerja dari rangkaian alat kekeruhan air
2. Mengetahui bagaimana fungsi dari masing- masing komponen utama yaitu sensor cahaya dan komponen lain nya 3. Bagaimana menentukan nilai turbiditas air keran , air aquades dan air minuman
coca cola
1.4 TUJUAN PENELITIAN
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah :
1. Untuk mengembangkan fungsi sensor cahaya dengan cara membuat alat pengukur kekeruhan air dalam bidang instrumentasi.
2. Untuk menambah pengetahuan penulisan dalam membuat dan menganalisa suatu hasil praktek dengan teori ketika membuat alat pengukur kekeruhan air
1.5 MANFAAT
Adapun Manfaat pembahasan ini adalah :
1. Mempermudah pekerjaan dalam bidang pengukuran khususnya mengukur kekeruhan air
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, batasan masalah, tujuan pembahasan, metodologi pembahasan, sistematika penulisan dan relevansi dari penulisan tugas akhir ini.
BAB II : TINJAUAN PUSTAKA
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang pengukuran ,kekeruhan air dipergunakan, serta cara kerja dari kekeruhan air serta komponen pendukung.
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV : PENGUJIAN SISTEM
Berisi tentang pembahasan pengujian sistem dan menganalisa data hasil pengujian.
BAB V : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Umum
2.2 Mikrokontroler Atmega8535
Mikrokontroler sesuai namanya adalah suatu alat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada mikrokontroler, telah ada terlebih dahulu muncul mikroprosesor. Bila dibandingkan dengan mikroprosesor,mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya :
a. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia sementara pada mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O yang dimaksud adalah PPI 8255. (Syahrul.2012)
b. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga mutlak harus ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC memori eksternal. Dengan kelebihan-kelebihan di atas, ditambah dengan harganya yang relatif murah sehingga banyak penggemar elektronika yang kemudian beralih ke mikrokontroler. Namun demikian, meski memiliki berbagai kelemahan, mikroprosesor tetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem.
bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti komputer).(Dedi.2010)
Gambar 2.1 Blok Diagram ATMega8535
Dari gambar tersebut dapat dilihat bahwa Atmega8535 memiliki bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu Atmega8535. Selain mudah didapatkan dan lebih murah Atmega8535 juga memiliki fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu ATTiny, AVR klasik, dan ATMega. Perbedaannya hanya pada fasilitas dan I/O yang tersedia serta fasilitas lain seperti ADC, EEPROM, dan lain sebagainya. Salah satu contohnya adalah ATMega 8535. Memiliki teknologi RISC dengan kecepatan maksimal 16 MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan varian MCS51.Adapun blok diagramnya sebagai berikut :
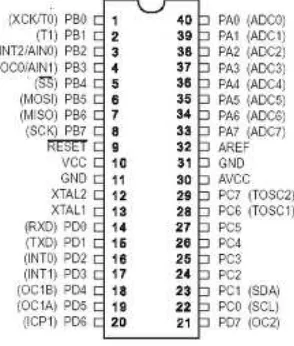
Mikrokontroler Atmega8535 mempunyai jumlah pin sebanyak 40 buah, dimana 32 pin digunakan untuk keperluan port I/O yang dapat menjadi pin input/output sesuai konfigurasi. Pada 32 pin tersebut terbagi atas 4 bagian (port),
yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk keperluan rangkaian osilator, supply tegangan, reset, serta tegangan referensi untuk ADC. Untuk lebih jelasnya, (Agus. 2005).
Berikut ini adalah susunan pin-pin dari Atmega8535;
• VCC merupakan pin yang berfungsi sebagai pin masukkan catu daya • GND merupakan pin ground
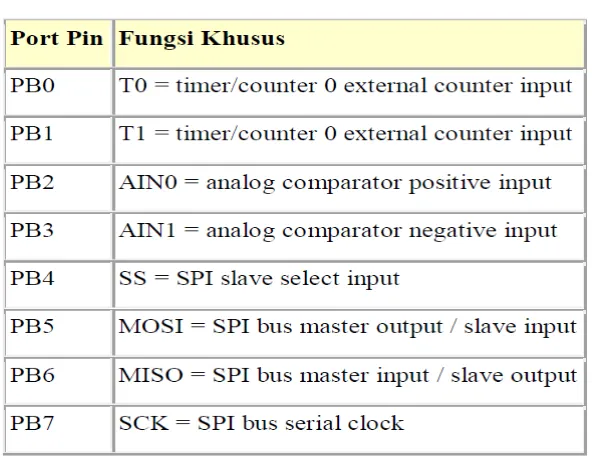
• Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC • Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu Timer/Counter, Komparator Analog, dan SPI
• Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, Komparator Analog, dan Timer Oscilator
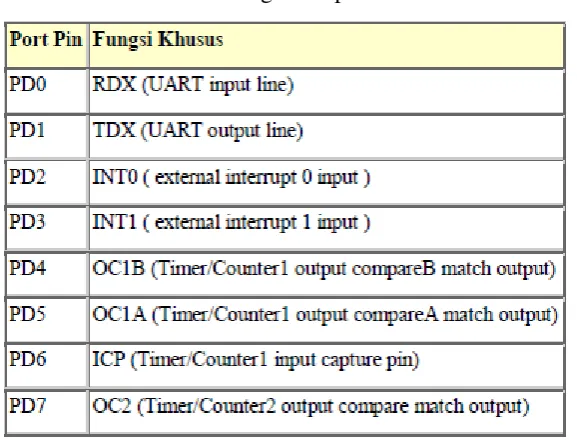
• Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Komparator Analog, Interupsi Iksternal dan komunikasi serial USART
• Reset merupakan pin yang digunakan untuk mereset mikrokontroler • XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal
2.3 Port-Port Pada Atmega8535 Dan Fungsinya
Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
Port B
Tabel 2.1 Fungsi Pin-pin Port B
Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator untuk timer/counter 2.
Port D
Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.2 Fungsi Pin-pin Port D
RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit
XTAL2
AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberikan ke kaki ini
AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah
2.4Peta Memori ATMega8535
ATMega8535 memiliki dua jenis memori yaitu Program Memory dan Data Memory ditambah satu fitur tambahan yaitu EEPROM Memory untuk penyimpan data.(Wardhana.2006)
2.4.1 Program Memory
ATMega8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memory
dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader,
yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi
menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman.(Agus.2005)
Gambar 2.3 Peta Memori Program
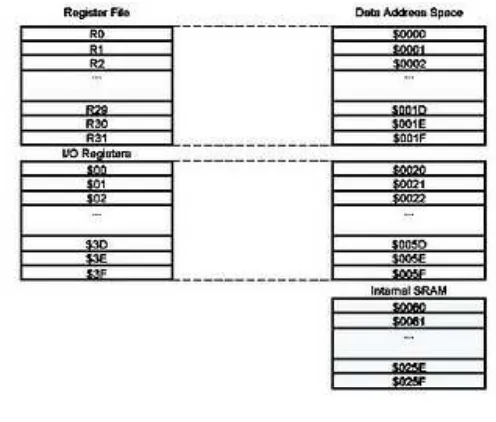
2.4.2 Data Memory
.
Gambar 2.4 Peta Memori Data
untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiri dari 64 register
2.4.3 EEPROM Data Memory
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Loaksinya terpisah dengan system address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.4.4 Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2. 6 Status Register ATMega 8535
• Bit 7 – I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan. Bit ini akan clear ketika ada interrupt yang dipicu dari hardware, setelah program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi SEI.
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
• Bit 5 – H: Half Carry Flag
• Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement Overflow Flag V.
• Bit 3 – V : Two’s Complement Overflow Flag Digunakan dalam operasi aritmatika
• Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
• Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghaslkan bilangan nol, maka bit ini akan set.
• Bit 0 – C : Carry F
• lag
Jika suatu operasi menghasilkan Carry, maka bit ini akan set.
2.5 Komunikasi Serial
komunikasi data serial asinkron. Pada komunikasi data serial asinkron, clock dikirimkan bersama-sama dengan data serial tetapi clock tersebut dibangkitkan sendiri-sendiri baik pada sisi pengirim maupun sisi penerima. Sedangkan komunikasi data serial asinkron tidak diperlukan clock karena data dikirimkan dengan kecepatan tertentu. Baik pada pengirim maupun penerima.
2.5.1 Komunikasi Serial pada ATmega8535
Peralatan komunikasi Serial pada ATmega8535 sudah terintegrasi pada system Chip. Dan masing-masing registernya baik data maupun kontrol dihubungkan dengan register Input-Output atau Port, sebagaimana peralatan lainnya. Sehingga User (kita) cukup hanya mengakses register-register yang berhubungan dengan Serial inilah untuk mempengaruhi atau memanipulasi peralatan tersebut. Data dikirim melalui beberapa jalur data. Biasanya masing-masing dengan kabel tersendiri.Pada prisipnya register-register peralatan ini hanya 5 buah. UDR, UCSRA, UCSRB, UCSRC, dan UBRR. (Wardhana .2006)
USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
2.5.2 UDR (USART Data Register)
diterima dari USART akan ditampung ke dalam UDR. USART kemudian memberitahukan kepada user (kita) melalui beberapa bendera, maupun interupsi, saat 1 byte data yang diterima sudah lengkap, dan hendak bersiap untuk menerima 1-byte data berikutnya. User (kita) diminta untuk segera mengambil data pada UDR sebelum UDR ditimpa oleh data byte yang baru. Demikian tansfer data pada Serial ini, dilakukan byte demi byte dengan menggunakan UDR.
2.5.3 UCSRA, UCSRB, UCSRC (Usart Control and Status Register)
Tiga register ini adalah register-register untuk mengontrol panampilan dari USART. Bagaimana data ditangani, jumlah bit setiap datanya, apakah menggunakan paritas, jumlah stop bitnya, dan lain sebagainya yang berhubungan dengan pengaturan. Termasuk juga berisi bendera-bendera yang digunakan untuk mengatahui sampai di mana proses yang sedang terjadi. Setiap bit dalam 3 register tersebut mengandung sebuah arti yang khusus, dan berpengaruh yang khusus pula.
2.5.4 UBRR (Usart Baud Rate Register)
2.6 Bahasa Pemrograman Mikrokontroler
Pengembangan sebuah sistem menggunakan mikrokontroler AVR buatan ATMEL menggunakan software AVR STUDIO dan CodeVisionAVR. AVR STUDIO merupakan software yang digunakan untuk bahasa assembly yang mempunyai fungsi yang sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR. Sedangkan CodeVisionAVR merupakan software C-cross Compiler, dimana program dapat ditulis dalam bahasa C, CodeVision memiliki IDE (Integrated development Environment) yang lengkap, dimana penulisan program, compile,link, pembuatan kode mesin (assembler) dan download program ke chip AVR dapat dilakukan dengan CodeVision, selain itu ada fasilitas terminal, yaitu melakukan komunikasi serial dengan mikrokontroler yang sudah di program. Proses download program ke IC mikrokontroler AVR dapat menggunakan System programmable Flash on-Chip mengizinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
2.6.1 CodevisionAVR
untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded.
File object COFF hasil kompilasi dapat digunakan untuk keperluan debugging pada tingkatan C, dengan pengamatan variabel, menggunakan debugger Atmel AVR Studio. IDE mempunyai fasilitas internal berupa software AVR Chip In-System Programmer yang memungkinkan Anda untuk melakukan transfer program kedalam chip mikrokontroler setelah sukses melakukan kompilasi/asembli secara otomatis. Software In-System Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVRProg, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/development boards.
Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
• Modul LCD alphanumeric
• Bus I2C dari Philips
• Sensor Suhu LM75 dari National Semiconductor
• Real-Time Clock: PCF8563, PCF8583 dari Philips, DS1302 dan DS1307 dari Maxim/Dallas Semiconductor
• Protokol 1-Wire dari Maxim/Dallas Semiconductor
• Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
• Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor
• SPI
• Power Management
• Delay
• Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengujinkan Anda untuk menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
• Set-up akses memori eksternal
• Inisialisasi port input/output
• Inisialisasi interupsi eksternal
• Inisialisasi Timer/Counter
• Inisialisasi Watchdog-Timer
• Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
• Inisialisasi Pembanding Analog
• Inisialisasi ADC
• Inisialisasi Antarmuka SPI
• Inisialisasi Antarmuka Two-Wire
• Inisialisasi Antarmuka CAN\
• Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307
• Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20
2.7 MAX/ HIN/ RS 232
Modul ini dapat difungsikan sebagai jalur komunikasi antara komputer atau mikrokontroler berantarmuka UART RS232 / TTL dengan modul atau jaringan berantarmuka UART RS485 half-duplex. RS232-RS485 Converter merupakan suatu pengubah level tegangan dua arah antara RS232/TTL dan RS485. Modul ini dapat difungsikan sebagai jalur komunikasi antara computer atau mikrokontroler berantarmuka UART RS232 dengan modul atau jaringan berantarmuka UART RS485.
Spesifikasi
1. Mengubah level tegangan RS232 atau TTL menjadi RS485 dan sebaliknya.
2. Mengakomodasi baud rate 300 bps hingga 115200 bps.
3. Dapat dikonfigurasi sebagai DCE (Data Communication Equipment) atau DTE (Data Terminal Equipment).
4. Arah data pada jalur RS485 dapat dikendalikan secara manual (sisi RS232/TTL menggunakan 2 jalur data dan 1 jalur kontrol) ataupun otomatis (sisi RS232/TTL hanya menggunakan 2 jalur data).
2.8 Modul ADC
Modul ADC( Analog to digital converter) terdiri atas 5 masukkan di Bandar A (PORT A <0:3,5>) dan 3 masukkan di Bandar E. Masukkan analog memuati (charges) kapasitor “ sample and hold” yang memeberikan keluaran nya kepada modul ADC dan modul ini memeberikan hasil konversi secara successive kepada register hasil ADRESL dalam ukuran 10 bit. Modul ini dapat beroperasi walaupun dalam keadaan sleep dengan syarat penabuh ADC diambil dari osilator RC internal. Modul ini memepunyai 4 register khusus: ADRESH memegang data hasil konversi byte tinggi
ADRESL memegang data hasil konversi byte rendah ADCON0 memegang operasi ADC.
ADCON1 memegang fungsi pen pen Bandar ADC
DAC sederhana dapat di buat dengan menggunakan rangkaian resistor yang di susun sebagai tangga R-2R DAC ini di susun menggunakan beberapa resistor dengan resistansi sebesar R dan beberapa resistor dengan menggunakan beberapa resistor lain dengan rsistansi sebesar 2R. JUmlah bit DAC tanggan R-2R dapat di buat sekehendak hati. Tentu saja tergantung jumlah tingkat tegangan yang diinginkan.
2.9 Menggunakan port untuk menyalakan LED
menyala jika jalur port tersebut bernilai 0 (yang artinya 0 volt,yang dengan demikian anoda lebih positif dibandingkan katoda dan akan padam jika jalur port bernilai 1 (yang artinya 5 volt,sehingga anoda memilki tegangan yang sama dengan katoda.
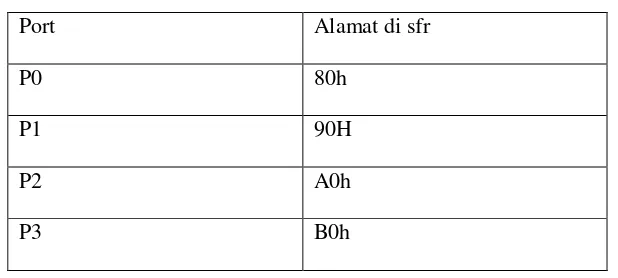
2.9 Register Port Masukkan/keluaran Paralel
Register port masukkan/keluaran paralele merupakan register yang digunakan sebagai buffer pada port masukkan/ keluaran P0,P1,P2,P3.Register port masukkan/keluaran berada di sfr dengan alamat seperti pada table di bawah ini.
Tabel 2.3 Alamat Port di SFR
Port Alamat di sfr
P0 80h
P1 90H
P2 A0h
P3 B0h
BAB III
PERANCANGAN ALAT DAN PEMBUATAN SISTEM
3.1 Spesifikasi Alat Sistem Pengukuran
Adaptor : 5 V / 2 A
Sensor Cahaya : 2cm – 3m IC Mikrokontroller : ATMega 8535
Port Serial : RS 232
LCD : 16 x 2 cm
Dan komponen pendukung lainnya
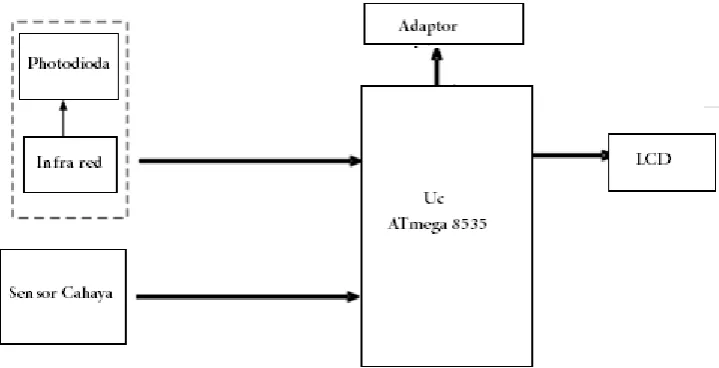
3.2 Perancangan Blok Diagram Sistim
Adapun diagram blok dari system yang dirancang,seperti yang diperlihatkan
Gambar 3.1 Diagram Block
Fungsi dari Tiap Blok :
1. Blok Fotodioda : Sebagai input/data 2. Blok Sensor Cahaya : Sebagai input data cahaya 3. Blok Mikrokontroller : Mengkonversi data dari sensor 4. Blok LCD : Sebagai penampil data
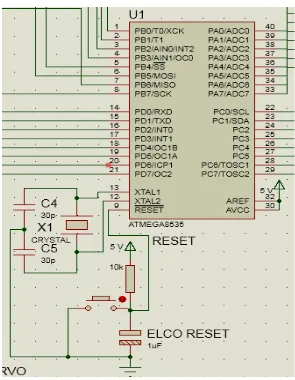
3.3 Rangkaian Mikrokontroler ATMega8535
:
Gambar 3.2 Rangkaian sistem minimum mikrokontroler ATMEGA 8535
3.4 Rangkaian Sensor cahaya
Sensor Cahaya LDR (Light Dependent Resistor) adalah salah satu jenis resistor yang dapat mengalami perubahan resistansinya apabila mengalami perubahan penerimaan cahaya. Besarnya nilai hambatan pada Sensor Cahaya LDR (Light Dependent Resistor) tergantung pada besar kecilnya cahaya yang diterima oleh LDR itu sendiri. LDR sering disebut dengan alat atau sensor yang berupa resistor yang peka terhadap cahaya. Biasanya LDR terbuat dari cadmium sulfida yaitu merupakan bahan semikonduktor yang resistansnya berupah-ubah menurut banyaknya cahaya (sinar) yang mengenainya. Resistansi LDR pada tempat yang gelap biasanya mencapai sekitar 10 MΩ, dan ditempat terang LDR mempunyai resistansi yang turun menjadi
sekitar 150 Ω. Seperti halnya resistor konvensional, pemasangan LDR dalam suatu
gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, aluminium, baja, emas dan perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling banyak, digunakan karena mempunyai daya hantaryang baik (TEDC,1998) Prinsip Kerja Sensor Cahaya LDR (Light Dependent Resistor) Resistansi Sensor Cahaya LDR (Light Dependent Resistor) akan berubah seiring den-gan perubahan intensitas cahaya yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi LDR
seki-tar 10MΩ dan dalam keadaan terang sebe-sar 1KΩ atau kurang. LDR terbuat dari ba
-han semikonduktor seperti kadmium sul-fida. Dengan ba-han ini energi dari cahaya yang jatuh menyebabkan lebih banyak mua-tan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah men-galami penurunan.
Gambar 3.3 Sensor Cahaya
3.5 Display LCD Character 2 x16
Tabel 3.1 fungsi pinLCD character 2x16
0 = Instruction Register 1 = Data Register
5 R/W
13 DB6 - 14 DB7 MSB
15 BPL Back Plane Light 16 GND Ground voltage
Gambar 3.4 LCD character 2x16
Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD itu sendiri.
Gambar 3.5 Peta memory LCD character 2x16
pertama menempati alamat 00h. dan karakter kedua yang berada pada posisi baris kedua menempati alamat 40h
Agar dapat menampilkan karakter pada display maka posisi kursor harus terlebih dahulu diset. Instruksi Set Posisi Kursor adalah 80h. dengan demikian untuk menampilkan karakter, nilai yang terdapat pada memory harus ditambahkan dengan 80h.
Sebagai contoh, jika kita ingin menampilkan huruf “B” pada baris kedua pada posisi kolom kesepuluh.maka sesuai dengan peta memory, posisi karakter pada kolom 10 dari baris kedua mempunyai alamat 4Ah, sehingga sebelum kita menampilkan huruf “B” pada LCD, kita harus mengirim instruksi set posisi kursor, dan perintah untuk instruksi ini adalah 80h ditambah dengan alamat 80h + 4Ah =0Cah. Sehingga dengan mengirim perintah 0Cah ke LCD, akan menempatkan kursor pada baris kedua dan kolom ke 1
3.6Rangkaian RS 232
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler dengan devais lainnya.
Gambar 3.6. MAX232 dalam rangkaian
3.7 Diagram Alir Program
gambar 3.7. flowchat cara kerja alat mulai
Inisialisasi serial port
Inisialisasi ADC
Akses/baca nilai Intensitas cahaya
Kirim nilai ke mikro
Tampilkan nilai LCD
Keterangan :
BAB IV
PENGUJIAN ALAT DAN ANALISA RANGKAIAN
4.1 Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 40 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 20 dihubungkan dengan ground. Kemudian tegangan pada kaki 40 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega 8535, program yang diberikan adalah sebagai berikut:
#include <mega8535.h>
#include <delay.h>
#include <stdio.h>
while (1)
{
// Place your code here
PORTC=0x00;
Delay_ms(1000);
PORTC=0xFF;
Delay_ms(1000);
4.2 Pengujian dan Analisa Rangkaian Sensor Cahaya Metode Percobaan
4.2.1 Alat & Bahan
Alat Bahan
Turbidimeter dan Tabung Sampel
Air Aquades,Air kran toilet dan air minuman cocacola
4.2.2 Langkah kerja
1. Mempersiapkan alat dan bahan yang akan digunakan
2. Memasangkan/menyambungkan turbidimeter dengan sumber listrik, diamkan selama 15 menit
3. Larutan standar diletakan pada tempat sample yang ada dalam turbidimeter, lalu melakukan pengukuran dengan menyesuaikan nilai pengukuran dengan cara memutar tombol pengatur hingga nilai yang tertera pada layar pada turbidimeter sesuai dengan nilai standar
4. Sample dimasukan pada tempat pengukuran sampel yang ada pada turbidimeter
4.3 Data Pengamatan
No Jenis Sampel Nilai Pengukuran Manual
Pengujian sistem secara keseluruhan ini dilakukan dengan menggabungkan semua peralatan ke dalam sebuah system yang terintegrasi. Data hasil pengukuran dan grafik Pada data ini terdapat perbedaan antara data yang didapat dari nilai yang tertera dengan data yang dihasilkan oleh alat, dimana data yang dihasilkan oleh alat memiliki % deviasi = hal ini dapat dilihat dari hasil analisis yang diperoleh
% kesalahan = ∣ ���� −���� ���� ������� −������������ ��
Untuk nilai kran air
• Untuk nilai 8.4
% kesalahan =�8.4−12,6
12,6 � x 100 % = 0,33%
• Untuk nilai 9,3
% kesalahan =�9,3 − 12,6
12,6 � x 100 % = 0,26 %
• Untuk nilai 9,2
% kesalahan =�9,2 −12,6
12,6 � x 100 % = 0,26 %
Untuk nilai aquades
• Untuk nilai
% kesalahan =�12,9 − 13,2
13,2 � x 100 % = 0,2 %
• Untuk nilai
% kesalahan =�9,3 −13,2
13,2 � x 100 % = 0,29%
% kesalahan =�13,8 −13,2
13,2 � x 100 % = 0,04 %
% kesalahan =�32,0 −33,2
Pada praktikum yang telah dilakukan ini adalah untuk mengenal, mengetahui dan memahami atau mempelajari alat pengujian yaitu turbidimeter sekaligus mengukur tingkat kekeruhan pada pada beberapa sampel dengan menggunakan alat turbidimeter. Sampel yang di uji diantaranya air keran toilet, air aquades dan air minuman cocacola. Prinsip kerja dari alat untuk menguji kekeruhan ini adalah alat akan memancarkan cahaya pada media atau sampel, dan cahaya tersebut akan diserap, dipantulkan atau menembus media tersebut. Cahaya yang menembus media akan diukur dan ditransfer kedalam bentuk angka.
dengan jelas. Akan tetapi pengukuran sampel harus dilakukan sebanyak 3 kali dengan menekan tombol pengulangan pengukuran untuk setiap pengulangan agar pengukuran tepat atau valid, dan hasilnya langsung dirata-ratakan.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan dari percobaan ini, yaitu sebagai berikut :
1. Berdasarkan pengujian yang telah dilakukan dan berdasarkan data hasil pengamatan yang telah diperoleh maka dapat disimpulkan bahwa kekeruhan pada setiap sampel adalah tidak sama antara satu dengan yang lainnya .Hasil data yang telaah diperoleh bahwa pada sampel air keran toilet yaitu 8,9 NTU, air Aquades yaitu 12 NTU, air minuman coca cola 32 NTU.
2. Setiap sampel mempunyai tingkat kekeruhan yang berbeda satu sama lain. Kekeruhan tertinggi terdapat pada air minuman coca cola sedangkan yang terendah pada air keran toilet.
5.2 Saran
Daftar Pustaka
Agfianto Eko Putra, Teknik antar muka computer : konsep & aplikasi, Penerbit Graha Ilmu, Yogyakarta, 2002
Charles L. Philips, Royce D. Harbor, Sistem Kontrol, Penerbit PT Prenhallindo, Jakarta,
Arisman, Dr., MB, Gizi dalam daur kehidupan, Penerbit Buku kedokteran EGC, DEPKES, 1996
Interfacing the serial/ RS 232 Port/ http : // www. beyondlogic.org/ serial/
Prentice- hall, inc., Englewood Cliffs Nj, Electronic Instrumentasi & Measurement Tecniques, Penerbit Erlangga, Jakarta, 1999
Retna Prasetia dan Catur Edi Widodo,Teori dan Praktek Interfacing Port Parallel & Port Serial Komputer dengan VB 6.0, Penerbit Andi Yogyakarta
Suhata, ST, VB Sebagai Pusat Kendali Peralatan Elektronik, Penerbit Elex Media Komputindo, Jakarta, 2005.
Wolfgang link, Pengukuran, pengendalian & pengaturan dengan PC, Penerbit Elex Media Komputindo, Jakarta, 1993
LAMPIRAN A
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 31/05/2014 Author : user Company : free Comments:
Chip type : ATmega8535 Program type : Application
AVR Core Clock frequency: 1,000000 MHz Memory model : Small
#include <mega8535.h>
// Alphanumeric LCD functions #include <alcd.h>
#include <i2c.h> #include <stdio.h> #include <delay.h> #include <bh1750.h>
// Declare your global variables here signed int data,data2;
char dat[32];
void BH1750_init() {
delay_ms(100);
BH1750_write(power_down); }
void BH1750_write(unsigned char cmd) {
i2c_start();
i2c_write(cmd); i2c_stop();
}
unsigned long BH1750_read_word() {
unsigned char value=0; unsigned char lb = 0; unsigned char hb = 0; i2c_start();
i2c_write(BH1750_address_r); hb = i2c_read(1);
lb = i2c_read(0);
i2c_stop(); value =(hb<<8)|lb; return value;
}
unsigned char lb = 0;
unsigned long get_lux_value(unsigned char mode, unsigned long delay_time) {
unsigned long lux_value=0; BH1750_write(power_up); BH1750_write(mode);
//lux_value = BH1750_read_word(); lux_value=baca_i2c(0x23,0x47); delay_ms(delay_time);
BH1750_write(power_down);
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected TCCR0=0x00;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
TCCR1B=0x00; TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0x00;
OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// USART initialization // USART disabled UCSRB=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC disabled ADCSRA=0x00;
// SPI initialization // SPI disabled SPCR=0x00;
// TWI initialization // TWI disabled TWCR=0x00;
// Alphanumeric LCD initialization // Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu: // RS - PORTB Bit 5
lcd_putsf("yuni system"); i2c_init();
lcd_init(16); BH1750_init(); delay_ms(1000); lcd_clear(); while (1) {
data=get_lux_value(cont_H_res_mode2,300); data2=33-data;
sprintf(dat,"%d ntu",data2); lcd_clear();
lcd_gotoxy(0,0); lcd_puts(dat); delay_ms(300);