FAKULTAS TEKNOLOGI DAN INFORMATIKA
INSTITUT BISNIS DAN INFORMATIKA STIKOM SURABAYA 2016
RANCANG BANGUN ROBOT TANK SEBAGAI ALAT PENDETEKSI GAS MUDAH TERBAKAR BERBASIS KOMUNIKASI BLUETOOTH HC-05
TUGAS AKHIR
Program Studi S1 Sistem Komputer Fakultas
Teknologi dan Informatika
Oleh :
x DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN SYARAT ... ii
MOTTO ... iii
HALAMAN PERSEMBAHAN ... iv
HALAMAN PENGESAHAN ... v
HALAMAN PERNYATAAN ... vi
ABSTRAK ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan ... 3
1.5Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 5
2.1 Microcontroller ATMega 32A ... 5
xi
2.1.2 Konfigurasi pin Mikrokontroller AVR ATMega32A ... 7
2.2 Sensor Gas MQ4 dan MQ2 ... 11
2.3 Modul Bluetooth HC-05 ... 13
2.4 Dagu Rover 5 4WD ... 15
2.5 Motor DC ... 16
2.6 Pulse Width Modulation (PWM) ... 20
2.7 Liquid Cristal Display (LCD) ... 21
2.8 EMS 2A Dual H-Brige ... 24
2.9 Sensor Infrared ... 30
2.10 Joystick PS-2... 32
BAB III METODE PENELITIAN ... 33
3.1 Model Pengembangan ... 33
3.2 Prosedur Penelitian ... 33
3.3 Diagram Blok Sistem... 35
3.3.1 Diagram Blok Joystick ... 35
3.3.2 Diagram Blok Robot ... 36
3.4 Perancangan Mekanik Robot ... 38
3.4.1 Ukuran dimensi Mobile Robot ... 39
3.4.2 Struktur Material Mobile Robot ... 39
3.4.3 Perancangan Minimum system ATMega32A ... 40
3.4.4 Driver Motor DC 24V (EMS 2A Dual H-Bridge)... 41
3.4.5 Perancangan Joystick Bluetooth ... 43
xii
3.5.1 Program Membaca Sensor Gas dan Menampilkan Pada LCD ... 51
3.5.2 Program Komunikasi Bluetooth HC-05 ... 52
3.5.3 Program Membaca Sensor Infrared ... 53
3.6 Metode Pengujian dan Evaluasi Sistem... 54
3.6.1 Pengujian dan Evaluasi Minimum Sistem (ATMega32A) ... 54
3.6.2 Pengujian dan Evaluasi Driver Motor dan Motor DC ... 55
3.6.3 Pengujian dan Evaluasi Sensor Gas (MQ2 dan MQ4) ... 55
3.6.4 Pengujian dan Evaluasi Sensor Infrared ... 56
3.6.5 Pengujian dan Evaluasi Komunikasi Bluetooth HC-05 ... 56
BAB IV HASIL DAN PEMBAHASAN ... 57
4.1 Pengujian Minimum System ... 57
4.1.1 Tujuan ... 57
4.1.2 Alat yang Digunakan ... 57
4.1.3 Prosedur Pengujian ... 57
4.1.4 Hasil Pengujian ... 58
4.2 Pengujian Driver Motor dan Motor DC ... 60
4.2.1 Tujuan ... 60
4.2.2 Alat yang Digunakan ... 60
4.2.3 Prosedur Percobaan ... 60
4.2.4 Hasil Pengujian ... 61
4.3 Pengujian Sensor Gas (MQ2 dan MQ4) ... 62
4.3.1 Tujuan ... 62
xiii
4.3.3 Prosedur Percobaan ... 62
4.3.4 Hasil Pengujian ... 63
4.4 Pengujian Sensor Infrared ... 66
4.4.1 Tujuan ... 66
4.4.2 Alat yang Digunakan ... 66
4.4.3 Prosedur Pengujian ... 66
4.4.4 Hasil Pengujian ... 67
4.5 Pengujian Terhadap Komunikasi Bluetooth HC-05 ... 68
4.5.1 Tujuan ... 68
4.5.2 Alat yang Digunakan ... 68
4.5.3 Prosedur Pengujian ... 69
4.5.4 Hasil Pengujian ... 69
4.6 Pengujian Keseluruhan Sistem Robot Deteksi Benda yang Terdapat Gas Mudah Terbakar ... 70
4.6.1 Tujuan ... 70
4.6.2 Alat yang Digunakan ... 71
4.6.3 Prosedur Pengujian ... 71
4.6.4 Hasil Pengujian ... 71
4.7 Pengujian Keseluruhan Sistem Terhadap Kendali Robot ... 73
4.7.1 Tujuan ... 73
4.7.2 Alat yang Digunakan ... 73
4.7.3 Prosedur Pengujian ... 74
xiv BAB V
PENUTUP ... 76
5.1 Kesimpulan ... 76
5.2 Saran ... 77
DAFTAR PUSTAKA ... 78
LAMPIRAN ... 79
1 1.1 Latar Belakang Masalah
Pada industri kimia, sering terjadi kebocoran gas pada pipa maupun pada tabung gas yang berada di area industri tersebut. Gas tersebut biasanya mengandung unsur gas metana dan butane yang mudah terbakar. Kebocoran gas tersebut sangatlah berbahaya bagi para pekerja maupun masyarakat sekitar industri. Hal ini membuat para pekerja sangat kesulitan untuk mencari tahu dimana letak titik kebocoran gas yang akan dicari. Pada penelitian sebelumnya sudah digunakan perancangan pendeteksi kebocoran tabung gas berbasis microcontroller at89s52 (Budi Tjahjono,2013) Dan penelitian Pendeteksi Gas Metan Pada Sistem Biogas Berbasis Microcontroller (Ratna IP,2014). Namun pada penelitian tersebut dirasa masih membahayakan karena masih melibatkan peran manusia secara langsung.
Berdasarkan beberapa masalah di atas, maka dirasa perlu untuk merancang dan membuat sebuah Robot yang mampu untuk menggantikan peran manusia dan memiliki kemampuan mendeteksi kekuatan aroma gas, sehingga titik kebocoran bisa ditemukan.
Karena Robot dengan desain tersebut diharapkan Robot dapat menjelajah pada kondisi permukaan yang tidak datar dan memiliki kemampuan untuk menyeimbangkan diri.
1.2 Rumusan Masalah
Dari latar belakang yang telah diuraikan, dapat ditarik beberapa rumusan masalah sebagai berikut :
1. Bagaimana merancang dan membuat Robot pendeteksi gas yang mudah terbakar.
2. Bagaimana cara kontrol Robot menggunakan joystickBluetooth.
1.3 Batasan Masalah
Dalam perancangan dan pembuatan simulasi ini, terdapat beberapa batasan masalah, antara lain :
1. Menggunakan 1 Robot.
2. Robot akan dikontrol secara manual dengan joystick bluetooth. 3. Joystickbluetooth hanya berupa prototype.
4. Pergerakan Robot masih belum bisa berjalan secara skuensial.
5. Objek yang di cari berupa benda yang didalamnya terdapat gas mudah terbakar.
6. Gas yang dideteksi hanya gas yang mengandung unsur metana dan butane seperti bensin dan LPG.
1.4 Tujuan
Adapun tujuan dari pembuatan simulasi ini yaitu :
1. Mengendalikan pergerakan Robot menggunakan joystick bluetooth sebagai input kontrol.
2. Robot dapat mendeteksi bau gas yang mudah terbakar . 3. Mendeteksi adanya benda yang terdapat gas mudah terbakar
1.5 Sistematika Penulisan
Laporan Tugas Akhir ini ditulis dengan sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini membahas tentang latar belakang masalah, perumusan masalah, pembatasan masalah, tujuan penulisan laporan tugas akhir, dan sistematika penulisan tugas akhir.
BAB II : LANDASAN TEORI
Bab ini membahas tentang berbagai teori yang mendukung tugas akhir ini. Hal tersebut meliputi ATMega 32A, Sensor Gas (MQ2 dan MQ4), Obstacle Avoidance, Bluetooth HC-05, Motor DC.
BAB III : METODE PENELITIAN
tentang pembuatan perangkat keras (hardware) dengan menggabungkan perangkat lunak (software) sebagai pengontrol pada Robot tersebut, serta penerapan metode penelitian pada Robot ini.
BAB IV : PENGUJIAN DAN ANALISIS SISTEM
Bab ini berisi tentang pengujian secara keseluruhan. Pengujian yang dilakukan meliputi pengujian minimum sistem, pengujian motor driver, pengujian sensor gas MQ 02 dan MQ 04, pengujian Bluetooth HC-05, pengujian kendali Robot dengan joystick, pengujian keseluruhan sistem deteksi benda yang didalamnya terdapat gas mudah terbakar.
BAB V : PENUTUP
33 3.1. Model Pengembangan
Tujuan dari tugas akhir ini yaitu akan membuat sebuah mobile Robot yang mampu membantu manusia dalam mendeteksi kebocoran gas. Robot ini berperan sebagai perantara antara manusia dengan bau gas. Robot akan dikendalikan secara manual menggunakan joystick Robot Bluetooth yang sudah dirancang untuk mengirim perintah user, Robot akan berjalan menuju ke tempat yang diinginkan user untuk memeriksa apakah ada kebocoran gas.
Robot ini mempunyai lengan yang berfungsi untuk perantara antara Robot dengan benda yang didalamnya terdapat bau gas yang berbahaya. Dibagian ujung lengan Robot terdapat sensor gas yang berfungsi sebagai pencium bau gas yang yang mengandung unsur gas metana dan butane. Sedangkan sensor jarak akan mendeteksi suatu benda di depannya, agar Robot tidak menabrak benda tersebut karena benda tersebut sangat berbahaya dan supaya tidak terjadi hal-hal yang tidak diinginkan.
3.2. Prosedur Penelitian
Prosedur penelitian yang dipakai dalam pengerjaan tugas akhir ini adalah:
1. Studi literatur
penelitian yang dilakukan antara lain: Pencarian data-data literatur untuk perangkat keras dari masing-masing komponen, informasi dari internet dan konsep teoritis dari buku-buku penunjang tugas akhir ini, serta materi-materi perkuliahan yang telah didapatkan dan perancangan perangkat lunak yaitu menggunakan CodeVisionAVR melalui pencarian dari internet, dan konsep-konsep teoritis dari buku-buku penunjang tersebut. Dari kedua bagian tersebut akan dipadukan agar dapat bekerja sama untuk menjalankan sistem dengan baik.
2. Tahap perancangan dan pengembangan sistem
Dalam membuat pengembangan sistem, terdapat beberapa langkah rancangan sistem yang diambil antara lain:
a. Membuat flowchart pada proses sistem secara keseluruhan b. Melakukan perancangan perangkat keras yang meliputi:
1. Merancang rangkaian elektronik yang digunakan pada penelitian ini 2. Melakukan percobaan tentang cara penggunaan sensor dan device
yang digunakan pada penelitian ini 3. Merancang mekanik untuk mobile Robot
c. Melakukan perancangan perangkat lunak yang meliputi:
1. Mengatur protokol pengiriman antara PC dan microcontroller.
2. Membuat program pada microcontroller untuk mendeteksi benda yang didalamnya terdapat bau gas.
3. Membuat program pengiriman dari joystick Bluetooth ke microcontroller pada Robot.
5. Membuat program tampilan ke LCD.
3.3. Diagram Blok Sistem
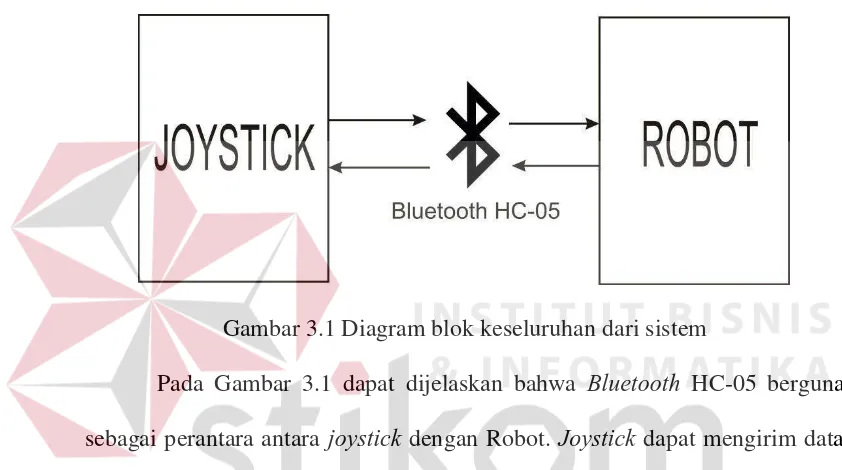
Dari penelitian ini terdapat suatu proses dimana joystick dapat terhubung dengan Robot melalui komunikasi Bluetooth HC-05. Pada Gambar 3.1 adalah diagram blok keseluruhan sistem ini.
Gambar 3.1 Diagram blok keseluruhan dari sistem
Pada Gambar 3.1 dapat dijelaskan bahwa Bluetooth HC-05 berguna sebagai perantara antara joystick dengan Robot. Joystick dapat mengirim data ke Robot dan sebaliknya Robot juga dapat mengirim data ke joystick melalui komunikasi Bluetooth HC-05. Didalam diagram blok keseluruhan sistem ini dapat dibagi menjadi dua bagian diagram blok yaitu diagram blok pada joystick dan diagram blok pada Robot. Berikut penjelasan tentang diagram blok joystick dan diagram blok Robot.
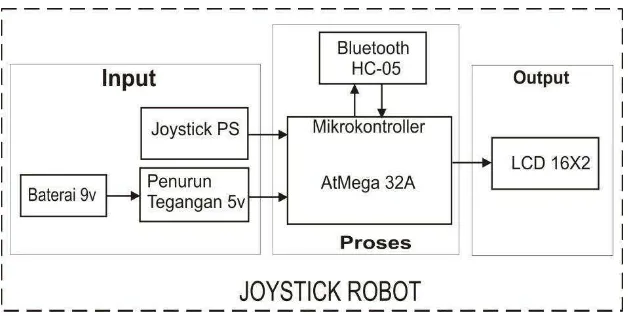
3.3.1 Diagram Blok Joystick
Gambar 3.2 Diagram Blok Joystick
Pada Gambar 3.2 dijelaskan bahwa didalam diagram blok joystick terdapat suatu sistem yaitu input, proses, dan output. Didalam input terdapat 3 komponen yaitu joystick, baterai 9 volt, dan penurun tegangan yang berguna sebagai masukan ke suatu proses. Sedangkan pada proses terdapat 2 komponen yaitu microcontroller ATMega32A yang berguna untuk memproses data masukan, dan Bluetooth HC-05 digunakan sebagai alat komunikasi antara microcontroller joystick dengan microcontroller Robot. Pada output terdapat LCD yang digunakan untuk menampilkan data yang sudah diproses oleh microcontroller ATMega32A.
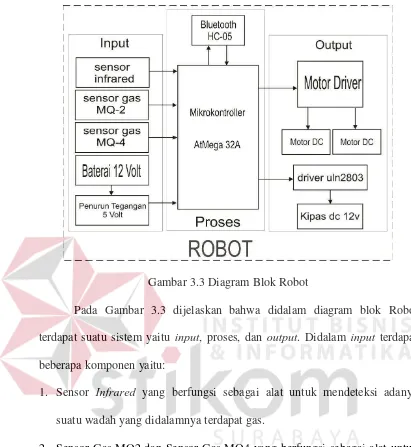
3.3.2 Diagram Blok Robot
Gambar 3.3 Diagram Blok Robot
Pada Gambar 3.3 dijelaskan bahwa didalam diagram blok Robot terdapat suatu sistem yaitu input, proses, dan output. Didalam input terdapat beberapa komponen yaitu:
1. Sensor Infrared yang berfungsi sebagai alat untuk mendeteksi adanya suatu wadah yang didalamnya terdapat gas.
2. Sensor Gas MQ2 dan Sensor Gas MQ4 yang berfungsi sebagai alat untuk mendeteksi bau gas metana dan butane.
3. Baterai 12 volt sebagai power supply.
kontrol pergerakan pada Motor DC dan driver ULN2803 sebagai penggerak pada kipas dc 12 volt.
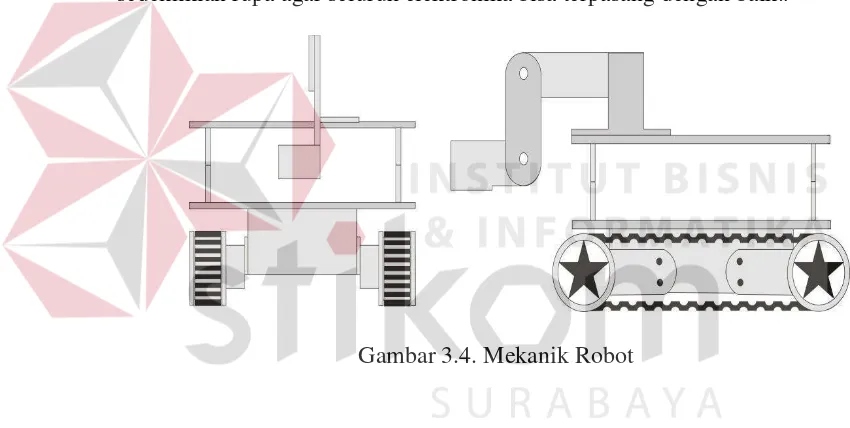
3.4 Perancangan Mekanik Robot
Didalam perancangan mekanik Robot ini terdapat dua pengerjaan mekanik, yaitu mekanik Robot dan mekanik joystik.
a. Mekanik Robot yang di gunakan adalah Dagu Rover 5 pada bagian base Robot dan didesain menyerupai bentuk roda tank. Robot ini didesain sedemikian rupa agar seluruh elektronika bisa terpasang dengan baik..
Gambar 3.4. Mekanik Robot
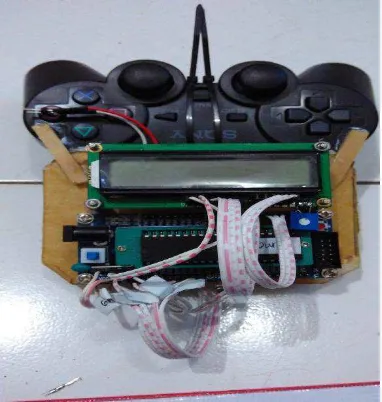
Gambar 3.5. Tampilan Joystick
3.4.1. Ukuran dimensi Mobile Robot
Setelah semua komponen tambahan dari penelitian ini dipasangkan ukuran dimensi dari Robot:
1. Ukuran Robot : 22cm (lebar) x 22cm (panjang) x 15,5cm (tinggi) 2. Ukuran lengan Robot : 20cm (panjang) x 3cm (lebar) x 25cm(tinggi) 3.4.2. Struktur Material Mobile Robot
Bahan material yang digunakan dalam penelitian ini menggunakan beberapa bahan diantaranya sebagai berikut :
a. Bagian rangka 1. Dagu Rover 5 2. Mur dan baut 3. Akrilik
b. Bagian dari penggerak Robot 1. Motor dc 7,2 Volt
c. Bagian dari Joystick 1. Joystick PS 2. Akrilik 3. Mur dan baut
3.4.3. Perancangan Minimum sistem ATMega32A
Pada tugas akhir ini dibuat beberapa buah pengendali menggunakan microcontroller keluaran pada perangkat lunak AVR, yaitu ATMega32A. Untuk menjalankan microcontroller ini diperlukan rangkaian minimum sistem. Rangkaian minimum sistem tersebut terdiri rangkaian reset dan rangkaian osilator. Dalam perancangan minimum sistem memerlukan beberapa komponen pendukung seperti kristal, resistor dan kapasitor.
Rangkaian minimum sistem dibuat untuk mendukung kerja dari microcontroller ATmega dimana microcontroller sebagai otak pada Robot dan tidak bisa berdiri sendiri atau harus ada rangakaian dan komponen pendukung seperti halnya rangakaian catu daya dan lain sebagainya yang biasanya disebut minimum sistem. Pada rangkaian minimum sistem ATMega32A ini terdapat konfigurasi pin input dan output sebagai berikut:
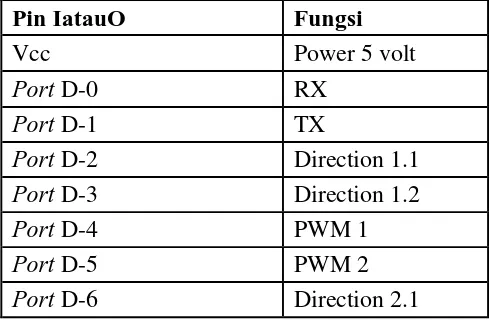
Tabel 3.1 Konfigurasi pin I atau O pada minimum sistem
Pin IatauO Fungsi
Vcc Power 5 volt
Port D-0 RX
Port D-1 TX
Port D-2 Direction 1.1
Port D-3 Direction 1.2
Port D-4 PWM 1
Port D-5 PWM 2
Port D-7 Direction 2.2
Port A-1 Sensor Infrared
Port A-6 Sensor MQ2
Port A-7 Sensor MQ4
Port C-1 Input Kipas DC
Port B-9 Mereset Program
3.4.4 Driver Motor DC 24 V (EMS 2A Dual H-Bridge)
Embedded Module Series (EMS) 2A Dual H-Bridge didesain untuk menghasilkan drive 2 arah dengan arus kontinyu sampai dengan 2 A pada tegangan 5,5 Volt sampai 46 Volt Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Secara garis besar, fungsi modul pengendali motor ini adalah untuk mengendalikan arah dan kecepatan putaran motor dc sesuai instruksi kendali dari minimum sistemATMega32A.
Kecepatan putar motor dapat dikendalikan dengan mengatur besar – kecilnya tegangan yang di masukkan, atau dapat juga dengan menggunakan teknik PWM (Pulse Width Modulation).
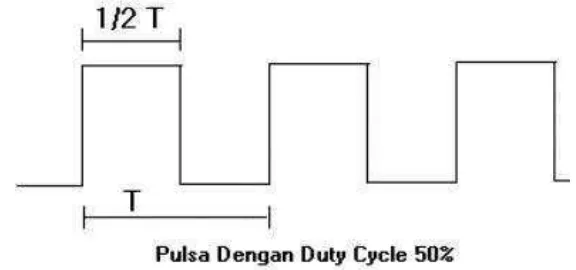
mulai dari bottom lagi dan begitu seterusnya atau yang dinamakan single slope (satu arah cacahan) (Ardi Winoto, 2008). Berikut adalah Gambar 3.3 untuk pulsa dengan duty cycle 50% :
Gambar 3.6 Pulsa dengan duty cycle 50%
Besarnya amplitudo dan frekuensi pulsa adalah tetap, sedangkan besarnya duty cycle berubah-ubah sesuai dengan kecepatan yang diinginkan, semakin besar duty cylce maka semakin cepat pula kecepatan motor. Sebagai contoh bentuk pulsa yang dikirimkan adalah seperti pada Gambar 3.3, pulsa kotak dengan duty cycle pulsa 50%. Semakin besar duty cycle pulsa kotak, maka semakin lama pula posisi logika high. Jika motor diatur agar berjalan ketika diberi logika high, maka jika memberi pulsa seperti pada Gambar 3.4, maka motor akan berada pada kondisi “hidup-mati-hidup-mati” sesuai dengan bentuk pulsa tersebut. Semakin lama motor berada pada kondisi “hidup” maka
semakin cepat pula kecepatan motor tersebut. Motor akan berputar dengan kecepatan maksimum jika mendapat pulsa dengan duty cycle 100%.
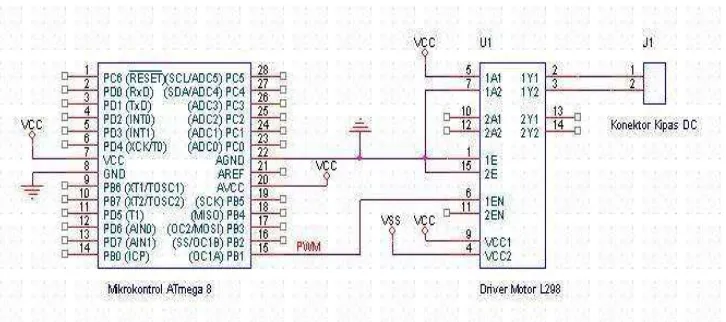
Gambar 3.7 Rangkaian drivermotor dc 24V L298N
3.4.5 Perancangan Joystick Bluetooth A. Serial Peripheral Interface (SPI)
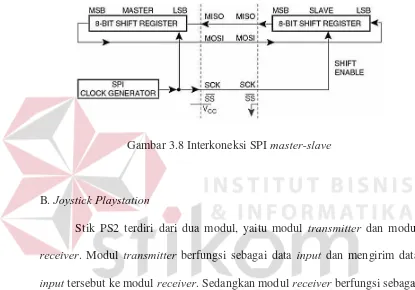
SPI merupakan hubungan data serial yang standar untuk mikroprosesor, microcontroller dan peripheral yang dikeluarkan oleh perusahaan Motorola. Hubungan dalam SPI merupakan hubungan data serial yang full-duplex, synchronous. SPI dipakai untuk menyediakan komunikasi antara kontroler dengan piranti peripheral. Komunikasi antara mikrokprosesor dan peripheral atau inter-processor dapat dilakukan dengan SPI. Piranti peripheral SPI tersedia dari shift register sederhana untuk ADC, DAC dan chip memori. Kontroler yang terintegrasi dengan port SPI menyediakan hubungan ke piranti peripheral dengan port SPI.
keluar oleh pulsa clock yang diterima pada pin SCK sampai pin SS dibuat rendah. Jika bit SPI Interrupt Enable (SPIE) pada register diset, sebuah interupsi diminta. Slave mungkin melanjutkan untuk data baru dikirim ke SPDR sebelum membaca data yang diterima. Byte terakhir yang diterima akan dijaga dalam Buffer Register untuk digunakan selanjutnya.
Gambar 3.8 Interkoneksi SPI master-slave
B. JoystickPlaystation
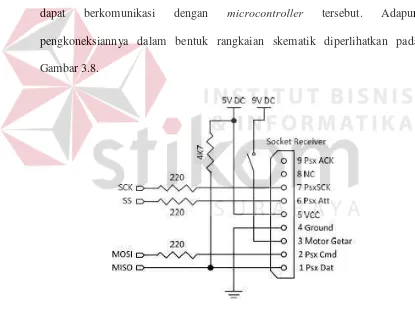
Gambar. 3.9 Konfigurasi pin Stik PS2
Beberapa pin Stik PS2 tersebut harus dikoneksikan ke microcontroller supaya dapat berkomunikasi dengan microcontroller tersebut. Adapun pengkoneksiannya dalam bentuk rangkaian skematik diperlihatkan pada Gambar 3.8.
Tabel 3.2 Data joystick Playstation
Byte Psx CMD
Psx Data Keterangan
01 0x01 -
02 0x42 0x41
03 - 0x5A Bit
7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
04 - Digital 1 Start Joy
R
Joy L
Select
05 - Digital 2 □ X O ∆ R1 R2 L1 L2
06 - Analog 1X Joystick analog kanan sumbu X 128 center 07 - Analog 1 Y Joystick analog kanan sumbu Y 128 center 08 - Analog 2X Joystick analog kiri sumbu X 128 center
09 - Analog 2 Y Joystick analog kiri sumbu Y 128 center
3.5. Rancangan Perangkat Lunak
a. Diagram alir keseluruhan sistem pada Robot
Gambar 3.11 Diagram alir keseluruhan sistem pada Robot
Tabel 3.3 Proses Pengendalian Robot
No. Tombol Joystick
Data yang diterima
Pergerakan Robot
1 A Maju
2 B Mundur
3 C Belok Kanan
4 D Belok Kiri
6 F Maju Serong Kiri
7 G Mundur Serong Kanan
8 H Mundur Serong Kiri
9 I Kecepatan + Maju
10 J Kecepatan + Mundur
11 K Kecepatan + Kanan
12 L Kecepatan + Kiri
13 M Kecepatan + Maju Serong Kanan
14 N Kecepatan + Maju Serong Kiri
15 O Kecepatan + Mundur Serong Kanan
16 P Kecepatan + Mundur Serong Kiri
17 S Mengaktifkan Kipas Dan Sensor Gas
18 - Z Berhenti (tidak ada input)
b. Diagram alir keseluruhan sistem pada joystick
Gambar 3.12 Diagram Alir Keseluruhan Sistem Pada Joystick
Tabel 3.4 Proses Pengiriman Data No. Tombol
Joystick
Data yang dikirim
Pergerakan Robot
1 A Maju
2 B Mundur
3 C Belok Kanan
4 D Belok Kiri
6 F Maju Serong Kiri
7 G Mundur Serong Kanan
8 H Mundur Serong Kiri
9 I Kecepatan + Maju
10 J Kecepatan + Mundur
11 K Kecepatan + Kanan
12 L Kecepatan + Kiri
13 M Kecepatan + Maju Serong Kanan
14 N Kecepatan + Maju Serong Kiri
15 O Kecepatan + Mundur Serong Kanan
16 P Kecepatan + Mundur Serong Kiri
17 S Mengaktifkan Kipas Dan Sensor Gas
18 - Z Berhenti (tidak ada input)
3.5.1 Program Membaca Sensor Gas dan Menampilkan Pada LCD Diagram alir untuk mengetahui nilai ADC (Analog to Digital Converter) dari bensin maupun LPG terhadap mobile Robot berdasarkan pembacaan sensor gas (MQ2 dan MQ4) dan ditampilkan ke LCD terdapat pada Gambar 3.13.
Gambar 3.13 Diagram Alir Pembacaan Sensor Gas.
Pada Gambar 3.13 diagram alir pembacaan nilai ADC bensin maupun LPG pada sensor gas MQ2 dan MQ4, dimulai dengan inisialisasi sensor gas MQ2 dan MQ4, kemudian melakukan penghitungan lebar pulsa dan data sensor gas MQ2 dan MQ4 tersebut disimpan pada sebuah variabel dan data tersebut dimasukkan dalam rumus untuk mengubah pulsa menjadi nilai digital, Setelah itu ditampilkan ke LCD. Berikut potongan program pembacaan sensor gas MQ2 dan MQ4 serta menampilkan ke Komputer :
kipas = 1; kanan_stop; kiri_stop;
atauatauformat pengiriman
atauatauP(data1)S(data2)K% delay_ms(5000);
atauataumemulai kirim data sensor putchar('P');
if(sensor1 < 10) printf("00%dS",sensor1);
else if(sensor1 >= 10 && sensor1 < 100) printf("0%dS",sensor1);
else printf("%dS",sensor1);
if(sensor2 < 10) printf("00%dK",sensor2);
else if(sensor2 >= 10 && sensor2 < 100) printf("0%dK",sensor2);
else printf("%dK",sensor2);
delay_ms(1); }
3.5.2 Program Komunikasi Bluetooth HC-05
Gambar 3.14 Diagram alir komunikasi Bluetooth.
Pada Gambar 3.14 diagram komunikasi bluetooth dimulai dengan mensettingBluetooth pada jalur RX dan TX. Setelah itu jika jalur RX dan TX terkoneksi maka Bluetooth akan melakukan proses scanning dan jika tidak terkoneksi maka Bluetooth pada jalur RX dan TX harus disetting lagi. Setelah melakukan proses scanning, jika Bluetooth terdeteksi maka Bluetooth berhasil terhubung,dan jika belum terdeteksi maka Bluetooth tetap melakukan scanning sampai bluetooh berhasil terhubung.
3.5.3 Program Membaca Sensor Infrared
Gambar 3.15 Diagram alir pembacaan sensor infrared
Pada diagram alir pembacaan sensor infrared terhadap benda dimulai dengan inisialisasi sensor, setelah itu sensor proses mendeteksi benda, jika benda tidak ada maka kembali ke proses pendeteksi benda, jika benda ada maka proses berhenti.
3.6 Metode Pengujian dan Evaluasi Sistem
Dalam pengujian sistem ini pengujian akan dilakukan pada perangkat keras serta perangkat lunak yang telah dibuat. Pengujian yang telah dilakukan dimulai dari pengujian minimum sistem, pengujian motor dc, pengujian komunikasi Bluetooth, pengujian sensor gas MQ-2 dan MQ-4, serta pengujian sensor Infrared.
3.6.1 Pengujian dan Evaluasi Minimum Sistem (ATMega32A)
dengan cara mengaktifkan power supply dan hubungkannya dengan minimum sistem. Sambungkan minimum sistem dengan komputer menggunakan kabel downloader lalu jalankan compiler CodeVisionAVR pada komputer tersebut. Setelah itu lakukan proses chip signature untuk mengetahui apakah sudah terkoneksi dengan baik dengan microcontroller. Jika proses chip signature berhasil maka akan keluar informasi tentang microcontroller yang terhubung antara komputer dengan microcontroller. Kemudian lakukan proses download pada microcontroller, jika proses download berhasil maka akan CodeVisionAVR akan mengeluarkan tampilan proses download.
3.6.2 Pengujian dan Evaluasi Driver Motor dan Motor DC
Pengujian motor dc ini bertujuan untuk mengetahui apakah motor dc bergerak atau berputar sesuai dengan yang diharapkan dan berputar dengan pwm tertentu sesuai dengan program yang telah di tentukan. Dalam hal ini pengujian dilakukan dengan memberikan tegangan pada driver motor dc dan melakukan koneksi antara driver motor dc dengan minimum sistem. Setelah itu proses dilanjutkan dengan menggunakan program untuk menggerakkan motor dc pada compiler CodeVisionAVR yang di download pada minimum sistem. Jika proses pengujian tersebut berhasil maka motor dc akan bergerak sesuai dengan yang diperintahkan dalam program yang terdapat pada microcontroller.
3.6.3 Pengujian dan Evaluasi Sensor Gas (MQ2 dan MQ4)
minimum sistem pada Robot. Setelah itu proses dilanjutkan dengan membaca nilai ADC pada compiler CodeVisionAVR yang akan di download pada minimum sistem dan akan ditampilkan pada LCD. Jika proses pengujian tersebut berhasil maka LCD akan menampilkan data berupa nilai kadar gas dari bensin maupun LPG.
3.6.4 Pengujian dan Evaluasi Sensor Infrared
Pengujian sensor infrared ini bertujuan untuk mengetahui informasi jarak antara benda dengan mobile Robot. Dalam hal ini pengujian dilakukan dengan memberikan tegangan pada sensor infrared dan melakukan koneksi antara sensor infrared dengan minimum sistem. Setelah itu proses dilanjutkan dengan menggunakan program membaca nilai “0” dan “1” dari sensor infrared pada compiler CodeVisionAVR yang akan di download pada minimum sistem ATMega32.
3.6.5 Pengujian dan Evaluasi Komunikasi Bluetooth HC-05
57
HASIL DAN PEMBAHASAN
Pengujian system yang telah dilakukan penulis ini merupakan pengujian terhadap perangkat keras serta perangkat lunak dari system secara keseluruhan yang telah selesai dibuat untuk mengetahui komponen-komponen dari sistem tersebut apakah sistem tersebut berjalan dengan baik.
4.1. Pengujian Minimum System 4.1.1. Tujuan
Pengujian minimum system bertujuan untuk mengetahui apakah minimum system dapat melakukan proses connect dan download program ke microcontroller dengan baik.
4.1.2. Alat yang Digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut: 1. Rangkaian minimum systemmicrocontroller ATMega32A. 2. Kabel Downloader.
3. PC atau Laptop.
4. Program CodeVisionAVR. 5. Power supply 1000mA - 12V. 4.1.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan power supply tersebut dengan minimum system.
2. Sambungkan minimum system dengan kabel downloader.
3. Selanjutnya aktifkan PC dan jalankan program CodeVisionAVR.
4. Selanjutnya download program yang telah dibuat kedalam minimum system, maka yang dilakukan adalah menjalankan menu Chip Signature Programmer pada CVAVR(CodeVisionAVR).
5. Setelah itu jika proses Signature selesai maka selanjutnya menuju ke proses compile project dengan menekan F9 pada keyboard, kemudian proses download program ke microcontroller masuk ke menu make project pada CodeVisionAVR.
6. Masuk ke menu chip programmer dan cari chip signature 7. Lalu tekan menu chip signature
8. Amati hasil pembacaan microcontroller yang ditampilkan oleh CVAVR, apakah sama dengan microcontroller yang diharapkan.
4.1.4. Hasil Pengujian
Gambar 4.1 Cara melakukan chip signature pada CVAVR
Setelah dilakukan chip signature maka pada PC akan menampilkan informasi berupa jenis chip dan beberapa informasi lain tentang microcontroller yang digunakan. Untuk lebih jelasnya terlihat pada Gambar 4.2.
[image:37.595.93.509.308.682.2]Dari hasil pengujian chip signature tersebut menandakan bahwa microcontroller telah siap digunakan dan sudah bisa digunakan untuk proses selanjutnya.
4.2. Pengujian Driver Motor dan Motor DC
Driver motor digunakan sebagai perantara antara microcontroller dengan motor DC agar microcontroller dapat mengatur pergerakan dari motor DC dan juga kecepatan yang diinginkan. Dalam pengujian ini microcontroller akan diberikan program yang mengatur pergerakan dari motor DC.
4.2.1. Tujuan
Pengujian ini bertujuan untuk melihat apakah minimum system telah dapat mengatur pergerakan dan kecepatan dari roda melalui input yang diberikan pada driver motor.
4.2.2. Alat yang Digunakan
1. Rangkaian minimum system ATMega 32A . 2. Downloader.
3. PC atau Laptop. 4. CodeVisionAVR.
5. Power supply 1000mA - 12V. 6. Driver motor.
7. Motor DC.
4.2.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system ATMega 32A. 2. Sambungkan minimum system dengan kabel downloader.
4. Download program untuk mengatur pergerakan motor yang telah dibuat kedalam minimum system
5. Lihat pergerakan roda sesuai dengan inputan pada program yang telah dibuat. 4.2.4. Hasil Pengujian
[image:39.595.94.502.271.664.2]Pengujian dengan pergerakan roda dengan inputan dari microcontroller dan driver motor sebagai device perantara dapat dilihat hasilnya pada tabel 4.1.
Tabel 4.1 Hasil pengujian pergerakan driver motor
No. Pin Input Input Gerak Motor DC
1
Input 1 1
Motor kiri maju Input 2 0
Input 3 0 Input 4 0
2
Input 1 0
Motor kiri mundur Input 2 1
Input 3 0 Input 4 0
3
Input 1 0
Motor kanan maju Input 2 0
Input 3 1 Input 4 0
4
Input 1 0
Motor kanan mundur Input 2 0
Input 3 0 Input 4 1
5
Input 1 0
Motor berhenti Input 2 0
4.3. Pengujian Sensor Gas (MQ-2 dan MQ-4)
Pengujian ini dilakukan dengan menghubungkan sensor gas MQ-2 dan MQ-4 pada microcontroller melalui port A-6, port A-7, tegangan 5v dan ground. Lalu memberikan program pembacaan nilai ADC pada sensor gas MQ-2 dan MQ-4, kemudian menampilkan hasilnya pada LCD ke dalam microcontroller.
4.3.1. Tujuan
Tujuan pengujian ini yaitu untuk mengetahui hasil pembacaan sensor gas MQ-2 dan MQ-4 dalam mendeteksi kadar gas sehingga memiliki output dari keseluruhan sistem yang telah dibuat berupa informasi persentase gas.
4.3.2. Alat yang Digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut:
1. Rangkaian minimum system ATMega 32A . 2. Downloader.
3. PC atau Laptop. 4. CodeVisionAVR.
5. Power supply 1000mA - 12V. 6. Sensor gasMQ-2 dan MQ-4 . 4.3.3. Prosedur Pengujian
Langkah-langkah untuk melakukan pengujian sensor gas MQ2 dan MQ-4 ini adalah sebagai berikut:
4. Download program pembacaan sensor gas yang telah dibuat kedalam minimum system.
5. Amati hasil pembacaan nilai ADC menggunakan sensor gas pada layar LCD. 4.3.4. Hasil Pengujian
Dalam pengujian sensor gas ini terdapat dua pengujian yaitu pengujian sensor gas terhadap Bensin dan pengujian sensor gas terhadap LPG.
[image:41.595.93.541.301.751.2]a. Pengujian sensor gas terhadap Bensin
Tabel 4.2 Pengujian sensor gas terhadap Bensin
No. Sensor 1 Range (215-255) Sensor 2 Range (122-165) Tingkat keberhasilan
Sensor 1 Sensor 2
1 255 193 Berhasil Tidak Berhasil
2 255 132 Berhasil Berhasil
3 222 140 Berhasil Berhasil
4 255 187 Berhasil Tidak Berhasil
5 255 145 Berhasil Berhasil
6 236 139 Berhasil Berhasil
7 215 162 Berhasil Berhasil
8 203 143 Tidak Berhasil Berhasil
9 255 136 Berhasil Berhasil
10 255 172 Berhasil Tidak Berhasil
11 185 130 Tidak Berhasil Berhasil
12 223 147 Berhasil Berhasil
13 255 149 Berhasil Berhasil
14 255 127 Berhasil Berhasil
15 210 131 Tidak Berhasil Berhasil
16 218 171 Berhasil Tidak Berhasil
17 255 136 Berhasil Berhasil
18 176 105 Tidak Berhasil Tidak Berhasil
19 247 140 Berhasil Berhasil
20 255 161 Berhasil Berhasil
21 255 137 Berhasil Berhasil
22 223 144 Berhasil Berhasil
23 200 123 Tidak Berhasil Berhasil
24 249 155 Berhasil Berhasil
25 255 171 Berhasil Tidak Berhasil
27 255 124 Berhasil Berhasil
28 255 139 Berhasil Berhasil
29 255 145 Berhasil Berhasil
30 188 115 Tidak Berhasil Tidak Berhasil
Rata-rata 235 144 23 22
[image:42.595.107.543.85.183.2]b. Pengujian sensor gas terhadap LPG
Tabel 4.3 Pengujian sensor gas terhadap LPG No. Sensor 1
range (63-103) Sensor 2 range (165-225) Tingkat keberhasilan
Sensor 1 Sensor 2
1 130 159 Tidak Berhasil Tidak Berhasil
2 111 217 Berhasil Berhasil
3 45 127 Tidak Berhasil Tidak Berhasil
4 123 247 Tidak Berhasil Tidak Berhasil
5 61 153 Tidak Berhasil Tidak Berhasil
6 118 188 Tidak Berhasil Berhasil
7 79 179 Berhasil Berhasil
8 71 188 Berhasil Berhasil
9 70 172 Berhasil Berhasil
10 102 209 Berhasil Berhasil
11 75 197 Berhasil Berhasil
12 118 218 Tidak Berhasil Berhasil
13 69 163 Berhasil Tidak Berhasil
14 96 225 Berhasil Berhasil
15 66 130 Berhasil Tidak Berhasil
16 96 221 Berhasil Berhasil
17 123 230 Tidak Berhasil Tidak Berhasil
18 60 184 Tidak Berhasil Berhasil
19 39 134 Tidak Berhasil Tidak Berhasil
21 53 173 Tidak Berhasil Berhasil
22 38 127 Tidak Berhasil Tidak Berhasil
23 51 143 Tidak Berhasil Tidak Berhasil
24 120 206 Tidak Berhasil Berhasil
25 69 184 Berhasil Berhasil
26 86 196 Berhasil Berhasil
27 108 232 Tidak Berhasil Tidak Berhasil
28 101 235 Berhasil Tidak Berhasil
29 118 227 Tidak Berhasil Tidak Berhasil
30 51 158 Tidak Berhasil Tidak Berhasil
Rata-rata
83 185 13 15
4.4Pengujian Sensor Infrared
Pengujian berikut adalah pengujian terhadap Infrared Sensor pada mobile Robotterhadap benda atau objek yang ada didepan mobile Robot. Pada pengujian ini dilakukan dengan cara mendekatkan Infrared Sensor ke suatu benda hingga mendeteksi adanya benda.
4.4.1 Tujuan
Pengujian ini bertujuan untuk menguji apakah Infrared Sensor pada mobile Robot telah bekerja sesuai dengan yang diharapkan dan dapat melakukan deteksi benda yang sesuai dengan kebutuhan pada tugas akhir ini.
4.4.2. Alat yang Digunakan 1. Personal Computer(PC)
2. Rangkaian minimum system ATMega 32A 3. Downloader.
4. CodeVisionAVR
5. Power supply 1000mA - 12V 6. Infrared Sensor
4.4.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system. 2. Sambungkan minimum system dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CodeVisionAVR.
4. Download program deteksi benda yang telah dibuat kedalam minimum system.
6. Amati hasil pembacaan benda menggunakan Infrared Sensor dilayar LCD. Amati apakah sensor tersebut berjalan sesuai input yang diberikan kepada program.
4.4.4. Hasil Pengujian
[image:45.595.97.517.319.649.2]Pengujian Infrared Sensor pada mobile Robotuntuk mendeteksi benda ini mempunyai set point yaitu 9 cm. Set point di peroleh saat pengujian pertama sensor infrared diberi halangan berupa benda dan diukur menggunakan penggaris. Berikut pengujian sensor infrared dapat dilihat hasilnya pada Tabel 4.4.
Tabel 4.4 Pengujian Sensor Infrared No. Jarak Tempuh Robot
(meter)
Jarak Robot dengan benda (cm)
Rata-rata (cm) Error (cm)
1 3 m 6
6,3 2,7
2 3 m 7
3 3 m 6
4 3 m 6,5
5 3 m 6
1 2 m 8
8,4 0,6
2 2 m 6,5
3 2 m 9
4 2 m 9
5 2 m 9,5
1 1 m 8
8,2 0,8
2 1 m 8
3 1 m 8
4 1 m 10
5 1 m 7
1 0,5 m 7,5
7,6 1,4
2 0,5 m 7,5
3 0,5 m 7
4 0,5 m 8,5
5 0,5 m 7,5
dan 0,5 meter. Sedangkan error terkecil diperoleh dari jarak normal yaitu dengan jarak 2 meter dan 1 meter.
Dari pengujian sensor infrared dapat disimpulkan ketika Robot berjalan dengan jarak terjauh dan terdekat pembacaan sensor infrared pada Robot masih kurang akurat. Sedangkan ketika Robot berjalan dengan jarak normal pembacaan sensor infrared pada Robot lebih akurat.
4.5 Pengujian Terhadap Komunikasi Bluetooth HC-05
Pengujian berikut adalah pengujian terhadap komunikasi Bluetooth HC-05. Didalam pengujian ini Bluetooth pada joystick akan mengirimkan data yang berupa karakter ke Bluetooth pada Robot dan peneliti dapat mengetahui apakah data yang diterima oleh Bluetooth sesuai dengan data yang dikirim.
4.5.1 Tujuan
Pengujian ini bertujuan untuk mengetahui apakah proses pengiriman data pada Bluetooth berjalan sesuai yang diharapkan.
4.5.2 Alat yang Digunakan 1. Personal Computer(PC)
2. Rangkaian minimum system ATMega 32A 3. Downloader.
4. CodeVisionAVR
5. Power supply 1000mA - 12V 6. Bluetooth HC-05
4.5.3 Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system. 2. Sambungkan minimum system dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CodeVisionAVR.
4. Download program pengiriman data pada Bluetooth yang telah dibuat kedalam minimum system.
5. Tekan tombol joystick dan lihat data yang ditampilkan pada LCD apakah data tersebut sama dengan data pada program.
4.5.4 Hasil Pengujian
[image:47.595.93.518.302.756.2]Pada pengujian ini proses komunikasi Bluetooth HC-05 dengan cara mengirimkan data inputan pada joystick yang berupa karakter. Karakter tersebut akan dikirim melalui Bluetooth HC-05 yang ada pada joystick dan Robot dan hasil dari pengiriman tersebut akan ditampilkan ke LCD.
Tabel 4.5 Pengujian Komunikasi Bluetooth HC-05 No. Tombol
Joystick Data yang dikirim Data yang diterima Tingkat keberhasilan
1 A A Berhasil
2 B B Berhasil
3 C C Berhasil
4 D D Berhasil
5 E E Berhasil
6 F F Berhasil
7 G G Berhasil
8 H H Berhasil
9 I I Berhasil
10 J J Berhasil
11 K K Berhasil
13 M M Berhasil
14 N N Berhasil
15 O O Berhasil
16 P P Berhasil
17 S S Berhasil
18 - Z Z Berhasil
Pada Tabel 4.5 dapat disimpulkan bahwa proses pengiriman data antara Bluetooth HC-05 terdapat tingkat keberhasilan. Didalam pengujian ini Bluetooth berhasil melakukan proses pengiriman data sebesar 100% dan tidak ada error sama sekali.
4.6 Pengujian Keseluruhan Sistem Robot Deteksi Benda yang Terdapat Gas Mudah Terbakar.
Pengujian keseluruhan sistem mobile Robot melakukan penyusuran ke area yang tidak datar dengan jarak yang sudah ditentukan. Kemudian mobile Robot akan melakukan pencarian benda yang terdapat gas mudah terbakar. Setelah itu mobile Robot mulai mendeteksi bau gas dan hasilnya akan dikirim ke joystick.
4.6.1 Tujuan
4.6.2 Alat yang Digunakan 1. Personal Computer(PC) 2. Downloader
3. CodeVisionAVR
4. Power supply 1000mA - 12V 5. Mobile Robot
6. Joystick Bluetooth
7. Meteran
4.6.3 Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system. 2. Sambungkan minimum system dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CodeVisionAVR. 4. Download seluruh program yang sudah jadi ke ATMega 32
5. Amati hasil pecarian pada mobile Robotserta mendeteksi adanya benda yang terdapat bau gaas di area tersebut.
4.6.4 Hasil Pengujian
Tabel 4.6 Hasil Pengujian keseluruhan sistem Percobaan ke- Jarak Tempuh (m) Jarak Deteksi Dengan Benda(cm)
Tingkat Keberhasilan Deteksi Pada
Bensin LPG
Sensor 1 Sensor 2 Sensor 1 Sensor 2 1 10 m 7 cm Berhasil Gagal Berhasil Berhasil 2 10 m 7,5 cm Berhasil Berhasil Berhasil Berhasil 3 10 m 6,6 cm Gagal Gagal Berhasil Berhasil 4 10 m 8 cm Berhasil Berhasil Gagal Berhasil 5 10 m 7 cm Berhasil Berhasil Berhasil Berhasil
6 10 m 10 cm Gagal Gagal Gagal Gagal
7 10 m 6,5 cm Berhasil Gagal Berhasil Berhasil 8 10 m 6 cm Berhasil Gagal Berhasil Berhasil 9 10 m 7 cm Berhasil Berhasil Berhasil Berhasil 10 10 m 8 cm Berhasil Berhasil Gagal Gagal 11 6 m 8 cm Berhasil Berhasil Gagal Berhasil 12 6 m 9 cm Berhasil Berhasil Gagal Gagal 13 6 m 7 cm Berhasil Berhasil Berhasil Berhasil 14 6 m 5,5 cm Gagal Gagal Berhasil Berhasil 15 6 m 7,7 cm Berhasil Berhasil Gagal Gagal 16 6 m 8 cm Berhasil Berhasil Gagal Berhasil
17 6 m 6 cm Gagal Gagal Berhasil Berhasil
18 6 m 6,5 cm Gagal Gagal Berhasil Berhasil 19 6 m 7,5 cm Berhasil Berhasil Berhasil Berhasil 20 6 m 7 cm Berhasil Berhasil Berhasil Berhasil 21 2 m 9 cm Berhasil Berhasil Gagal Gagal 22 2 m 8 cm Berhasil Berhasil Berhasil Gagal 23 2 m 7,5 cm Berhasil Berhasil Berhasil Berhasil 24 2 m 8,3 cm Berhasil Berhasil Gagal Gagal 25 2 m 7,7 cm Berhasil Berhasil Berhasil Gagal 26 2 m 8 cm Berhasil Berhasil Berhasil Berhasil 27 2 m 8,5 cm Berhasil Berhasil Gagal Gagal 28 2 m 7 cm Berhasil Berhasil Berhasil Berhasil
29 2 m 6 cm Gagal Gagal Berhasil Berhasil
30 2 m 8 cm berhasil Berhasil Gagal Gagal
dan pada Sensor2 mobile Robot berhasil mendeteksi 21 kali keberhasilan, 9 kali gagal. Sedangkan untuk mendeteksi LPG pada Sensor1 mobile Robot berhasil mendeteksi 19 kali, 11 kali gagal dan pada Sensor2 mobile Robot berhasil mendeteksi 20 kali, 10 kali gagal. Dari hasil pengujian tersebut terdapat persentase tingkat keberhasilan yaitu deteksi terhadap bensin sebesar 75% dan deteksi terhadap LPG sebesar 65%. Pada pengujian tersebut masih banyak mengalami kegagalan, hal ini disebabkan oleh angin yang berhembus dan membuat pembacaan sensor jadi kurang akurat.
4.7 Pengujian Keseluruhan Sistem Terhadap Kendali Robot
Pengujian keseluruhan sistem terhadap kendali Robot adalah pengujian saat user mengendalikan Robot menggunakan joystick Bluetooth dan peneliti akan mengetahui apakah perintah yang diinginkan user sesuai dengan pergerakan Robot.
4.7.1 Tujuan
Pengujian ini bertujuan untuk mengetahui bagaimana jalannya Robot ketika user menggendalikan Robot menggunakan joystick Bluetooth. Serta peneliti dapat mengetahui apakah data masukan dari joystick sama dengan data yang diterima oleh Robot.
4.7.2Alat yang Digunakan 1. Personal Computer(PC) 2. Downloader
3. CodeVisionAVR
5. Mobile Robot
6. Joystick Bluetooth
4.7.3Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system. 2. Sambungkan minimum system dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CodeVisionAVR. 4. Download seluruh program yang sudah jadi ke ATMega 32A
5. Amati hasil kendali pada mobile Robot apakah sesui dengan perintah joystick.
4.7.4 Hasil Pengujian
[image:52.595.97.514.322.743.2]Pengujian keseluruhan sistem pada kendali Robot ini yaitu Robot akan dikendalikan dengan joystick oleh user dengan cara user memberi perintah untuk bergerak maju, mundur, belok kiri dan belok kanan.
Tabel 4.7 Hasil Pengujian Terhadap Kendali Pergerakan Robot Percobaan ke- Tombol joystick Keterangan arah Pergerakan Robot Tingkat keberhasilan
1 Atas Maju Maju Berhasil
2 Atas Maju Maju Berhasil
3 Atas Maju Maju Berhasil
4 Atas Maju Maju Berhasil
5 Atas Maju Maju Berhasil
6 Atas Maju Maju Berhasil
7 Atas Maju Maju Berhasil
8 Atas Maju Maju Berhasil
9 Atas Maju Maju Berhasil
10 Atas Maju Maju Berhasil
11 Bawah Mundur Mundur Berhasil
12 Bawah Mundur Mundur Berhasil
13 Bawah Mundur Mundur Berhasil
14 Bawah Mundur Mundur Berhasil
15 Bawah Mundur Mundur Berhasil
16 Bawah Mundur Mundur Berhasil
18 Bawah Mundur Mundur Berhasil
19 Bawah Mundur Mundur Berhasil
20 Bawah Mundur Mundur Berhasil
21 Kiri Belok Kiri Belok Kiri Berhasil 22 Kiri Belok Kiri Belok Kiri Berhasil 23 Kiri Belok Kiri Belok Kiri Berhasil 24 Kiri Belok Kiri Belok Kiri Berhasil 25 Kiri Belok Kiri Belok Kiri Berhasil 26 Kiri Belok Kiri Belok Kiri Berhasil 27 Kiri Belok Kiri Belok Kiri Berhasil 28 Kiri Belok Kiri Belok Kiri Berhasil 29 Kiri Belok Kiri Belok Kiri Berhasil 30 Kiri Belok Kiri Belok Kiri Berhasil 31 Kanan Belok Kanan Belok Kanan Berhasil 32 Kanan Belok Kanan Belok Kanan Berhasil 33 Kanan Belok Kanan Belok Kanan Berhasil 34 Kanan Belok Kanan Belok Kanan Berhasil 35 Kanan Belok Kanan Belok Kanan Berhasil 36 Kanan Belok Kanan Belok Kanan Berhasil 37 Kanan Belok Kanan Belok Kanan Berhasil 38 Kanan Belok Kanan Belok Kanan Berhasil 39 Kanan Belok Kanan Belok Kanan Berhasil 40 Kanan Belok Kanan Belok Kanan Berhasil
76 PENUTUP
5.1. Kesimpulan
Berdasarkan dari hasil evaluasi dan pengujian yang sudah dilakukan dalam Rancang Bangun Robot Tank Sebagai Alat Pendeteksi Gas Mudah Terbakar Berbasis Komunikasi Bluetooth Hc-05, sehingga dapat dibuat beberapa kesimpulan sebagai berikut:
1. Dari hasil pengujian keseluruhan sistem sensor gas pada robot berhasil mendeteksi adanya gas yang terkandung dalam Bensin sebesesar 75% dan pada LPG sebesar 65%. Hal ini dikarenakan pada saat pengujian berada pada area terbuka.
2. Pada pengujian keseluruhan sistem terhadap kendali robot terdapat tingkat keberhasilan sebesar 100% dan tidak ada error sama sekali.
3. Pada pengujian sensor infrared dapat disimpulkan ketika Robot berjalan dengan jarak terjauh dan terdekat pembacaan sensor infrared pada Robot masih kurang akurat. Sedangkan ketika Robot berjalan dengan jarak normal pembacaan sensor infrared pada Robot lebih akurat.
5.2 SARAN
Agar pada penelitian selanjutnya sistem ini dapat dikembangkan lebih baik lagi, maka penulis memberikan saran sebagai berikut:
1. Untuk kedepannya kendali pada robot dapat dikembangkan dengan sistem android.
2. Untuk sensor benda dapat dikembangkan dengan menggunakan kamera supaya dapat membedakan benda lainnya.
3. Sensor gas diharapkan ditambahkan sebuah wadah untuk menampung gas yang telah dideteksi.
78
DAFTAR PUSTAKA
Budi Tjahjono, Khairul Saleh. 2013. Perancangan Pendeteksi Kebocoran Tabung Gas Berbasis Microcontroller At89s52
Ratna IP. 2014. Pendeteksi Gas Metan Pada System Biogas Berbasis Microcontroller.
ATMEL Corporation. 2005, Atmega32, (Online). (www.atmel.com, diakses 15 januari 2016)
Electronics, R. (2010, mei 4). EMS 2A Dual H-Bridge. Diambil dari (http://www.innovativeelectronics.com, diakses 16 januari 2016)