MENGGUNAKAN BORLAND DELPHI 7.0
SEBAGAI PROGRAM APLIKASI PENGENDALI
TUGAS AKHIR
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan Program Sarjana di Jurusan Teknik Elektro
Oleh :
RUDI RUSDIANA 1.31.06.016
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
i
banyak dikembangkan saat ini. Pengendalian pintu gerbang dengan menggunakan program aplikasi menggunakan Delphi digunakan sebagai salah satu pengembangan sistem komunikasi nirkabel, dalam perancangan ini menggunakan Modulasi FSK sistem modulasi digital dan dipancarkan dengan menggunakan transceiver FM, dan untuk pengolahan data pada motor menggunakan ATMega8535 dengan bahasa C. Secara elektronis alat ini dapat bekerja dengan baik sebagai mana yang diharapkan.dari Personal Computer (PC) dapat mengendalikan pintu gerbang membuka ataupun menutup.
ii
at this time. Control of the gate using an application program using Delphi is used as one of the development of wireless communication systems, the design uses FSK modulation and digital modulation system is emitted by using an FM transceiver, and for processing data on the motor using the C language ATMEGA8535 Electronic tool can work well as where desired. From Personal Computer (PC) can control the gate opens or closes.
panjatkan kehadirat Allah S.W.T. karena atas nikmat dan karunia-Nya-lah penulis dapat menyelesaikan laporan tugas akhir ini.
Laporan tugas akhir ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan program S1 di Jurusan Teknik Elektro. Penulis sangat menyadari bahwa laporan tugas akhir ini masih jauh dari kesempurnaan, oleh karena itu penulis sangat mengharapkan kritik dan saran dari semua pihak untuk perbaikan dan penyempurnaan laporan tugas akhir ini.
Dalam pembuatan laporan tugas akhir ini, banyak pihak yang telah memberikan masukan, bantuan, serta dorongan sehingga laporan tugas akhir ini dapat terselesaikan. Untuk itu penulis mengucapkan terimakasih yang sedalam-dalamnya kepada.
1. Orangtua tercinta yang telah mengasuh, mendidik, memberikan semangat, memberikan kasih sayang, dan memberikan doa restu yang tidak mungkin akan dapat terbalas.
2. Kakakku Yus Rusyana yang senantiasa memberi motivasi serta dukungan agar menyelesaikan tugas akhir ini.
3. Ibu Tri Rahajoeningroem, MT, selaku dosen wali dan juga sebagai dosen Pembimbing I yang telah memberikan bimbingan, dorongan serta motivasi untuk menyelesaikan tugas akhir ini.
5. Bapak Muhammad Aria, MT, selaku Ketua Jurusan Teknik Elektro Universitas Komputer Indonesia.
6. Seluruh dosen serta Staff Pengajar Universitas Komputer Indonesia Jurusan Teknik Elektro atas didikan dan dukungannya selama ini.
7. Para Sahabat Eceng Gondok Community Agah, Iip, Feri, Agung, Hanra, Yuga, Arief dan Wida yang bersama menyelesaikan tugas akhir ini.
8. Rekan-rekan seperjuangan Dede, Angga, Hilman, Indra, Jafar Juprie, Jafar Sidik, Zakir, Dublin Uhuy dan yang lainnya yang telah banyak membantu. 9. Semua pihak yang terlibat dalam pembuatan Tugas Akhir ini yang tak
mungkin penulis menuliskannya satu per satu. Terimakasih banyak.
Penulis menyadari dalam penyusunan tugas akhir ini masih jauh dari sempurna. Oleh karena itu saran dan kritik yang sifatnya membangun sangat penulis harapkan sebagai bahan masukan bagi penulis untuk menghasilkan karya yang lebih baik.
Semoga Allah SWT merestui dan memberikan ridho-Nya atas semua amal
perbuatan kita, Amin…..
Bandung, Agustus 2011
1 1.1 Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi (IPTEK) saat ini sangat
pesat, terutama di bidang teknologi elektronika yang dapat mempengaruhi
kehidupan masyarakat untuk melangkah lebih maju, berpikiran praktis, dan
simple. Hal semacam ini memerlukan sarana pendukung yang sederhana, praktis dan berteknologi tinggi. Salah satunya teknologi komputer yang tidak hanya
berperan dalam satu bidang saja, melainkan di segala bidang kehidupan manusia.
Banyak hal yang mungkin saat ini untuk menyelesaikan permasalahan manusia
membutuhkan biaya, waktu, tenaga yang cukup besar untuk penyelesaiannya.
Dengan adanya kemajuan teknologi komputer, permasalahan tersebut dapat
ditekan seminimal mungkin.
Sebagai contoh untuk membuka dan menutup pintu gerbang harus
dilakukan dengan menggerakkan pintu tersebut dengan secara manual. Dalam hal
ini bila ada peralatan yang dapat membuka dan menutup pintu dengan pengendali
dari jarak jauh maupun dari jarak dekat.
Peralatan ini dapat membuka dan menutup pintu sesuai dengan kehendak
yang diinginkan dengan menggunakan sebuah sistem pengontrolan. Pekerjaan
dalam membuka dan menutup pintu gerbang biasanya dilakukan secara manual,
apalagi antara jarak rumah dengan pintu gerbang yang begitu jauh. Apalagi
konstruksi dari pintu gerbang yang besar akan membuat orang semakin malas
Teknologi komunikasi nirkabel (Wireless) pada saat ini pun banyak berkembang untuk memenuhi kebutuhan. Keuntungannya adalah sifat
mobilitasnya yang tinggi dan tidak tergantung kepada kabel dan koneksi tetap.
Jaringan Wireless atau Wireless Network menjadi begitu sangat popular untuk dipasang dirumah-rumah atau di kantor-kantor. Ada beberapa sistem modulasi
yang digunakan dalam komunikasi wireless mulai dari modulasi analog sampai modulasi digital. Sekarang ini modulasi digital menjadi pilihan karena Melalui
proses modulasi digital sinyal-sinyal digital setiap tingkatan dapat dikirim ke
penerima dengan baik. Pada dasarnya ada 3 macam modulasi yaitu ASK, FSK
dan PSK. Modulasi FSK merupakan sistem modulasi yang kebal terhadap noise
dibandingkan dengan sistem modulasi yang lain untuk jarak yang tidak terlalu
jauh.
Atas dasar pertimbangan itulah maka alat ini dibuat dengan tujuan
mempermudah dalam membuka dan menutup pintu gerbang yang tidak efektif.
Sistem ini cukup handal digunakan untuk kelancaran mobilitas pekerjaan.
1.2 Rumusan masalah
Berdasarkan permasalahan diatas maka diperoleh rumusan masalah sebagai
berikut :
1. Bagaimana merancang sebuah sistem pengendali pintu gerbang dengan
motor untuk pengendali pintu gerbang dengan menggunakan sistem
modulasi FSK.
1.3 Tujuan
Tujuan yang diharapkan oleh penulis dalam pembuatan Tugas Akhir ini
adalah sebagai berikut :
1. Dapat merancang sebuah sistem pengendali pintu gerbang dengan
pengendalian jarak jauh.
2. Dapat mengolah data dari komputer agar bisa menjalankan motor untuk
pengendali pintu gerbang dengan menggunakan sistem modulasi FSK.
1.4 Batasan Masalah
Berdasarkan rumusan di atas, maka masalah difokuskan pada perancangan
dan pembuatan sebuah alat elektronis yang dapat membuka dan menutup pintu
dengan pengendali jarak jauh dengan ketentuan:
1. Menggunakan motor stepper sebagai penggerak utama pintu gerbang.
2. Pintu gerbang bergerak secara horizontal dari kiri ke kanan pada saat
membuka .
3. Menggunakan perangkat transceiver sebagai alat komunikasi berbasis
wireless.
1.5 Metodologi Penelitian
Tahapan-tahapan penelitian yang akan ditempuh dalam menyelesaikan
tugas akhir ini diantaranya adalah.
a. Tinjauan pustaka
Pencarian dan pengumpulan literatur-literatur dan kajian-kajian yang
berkaitan dengan masalah-masalah yang ada pada tugas akhir ini, baik
berupa artikel, buku referensi, internet, dan sumber-sumber lain yang
berkaitan dengan sistem dalam perancangan.
b. Perancangan sistem
Pada tahap ini akan dilakukan perancangan sistem dan ditampilkan dalam
bentuk blok diagram.
c. Pembuatan sistem
Pada tahap ini akan dilakukan pembuatan sistem sesuai dengan model
yang telah dirancang dalam blok diagram.
d. Pengujian sistem
Pengujian yang dilakukan dengan cara mengukur sinyal dari setiap blok,
setelah itu melakukan pengujian dengan menggabungkan tiap-tiap blok
dari sistem.
e. Analisa
Sistem yang sudah dibangun kemudian diuji, sesudah proses pengujian
BAB I PENDAHULUAN, berisi tentang latar belakang atau alasan pemilihan
judul/topik tugas akhir, tujuan tugas akhir, batasan masalah, metode penelitian
yang digunakan, dan sistematika penulisan laporan.
BAB II TEORI DASAR, menguraikan tentang teori–teori yang berhubungan
perancangan, teknik modulasi, motor stepper, pemograman delphi dan driver motor stepper, radio transceiver, multiplekser, demultiplekser, optocoupler dan komparator.
BAB III PERANCANGAN SISTEM, menjelaskan tentang proses perancangan
dan pembuatan alat, seperti modulasi dan demodulasi FSK, rangkaian driver motor stepper, rangkaian komparator, list program.
BAB IV PENGUJIAN ALAT DAN ANALISA, membahas tentang cara
pengujian alat pengendali gerbang dan membahas tentang analisa dari hasil
pengujian yang diperoleh.
BAB V PENUTUP, merupakan bagian akhir dari laporan tugas akhir yang berisi
tentang kesimpulan dari perancangan pengendalian pintu gerbang ini dan
6 2.1 Modulasi Digital
Dalam memenuhi kebutuhan transmisi sinyal, maka dibutuhkan suatu
proses modulasi atau penumpangan sinyal data yang berbentuk biner pada suatu
gelombang pembawa (carrier). Pemilihan jenis modulasi yang digunakan
ditentukan oleh penerapan yang diinginkan, termasuk juga karakteristik kanal
yang digunakan seperti bandwidth yang tersedia dan kerentanan (susceptibility)
kanal terhadap perubahan (fading).
Ada tiga macam perbedaan sistem modulasi digital antara lain:
1. Amplitude Shift Keying(ASK)
2. Frequency Shift Keying(FSK)
3. Phase Shift Keying(PSK).
Dalam modulasi digital terdapat teknik modulasi Quadrature Amplitude
Modulation (QAM), yang mana secara ektensif digunakan pada gelombang
microwave. QAM merupakan kombinasi antara ASK and PSK.
Modulasi pembawa dengan deretan pulsa ada tiga perbedaan jenisnya
dimana istilah modulasi ini disebut sebagai Pulse Amplitude Modulation (PAM),
Pulse Duration Modulation (PDM) dan Pulse Position Modulation (PPM). Ada
tipe lain dari modulasi yang disebutkan di atas yaitu Pulse Width Modulation
(PWM), dimana modulasi ini adalah melakukan variasi lebar pulsa tergantung dari
Gambar 2.1 Bentuk Modulasi Digital
Berbeda dengan modulasi analog dimana input signal berbentuk kontinu.
Pada modulasi digital signal input sudah berbentuk diskrit yang ditandai oleh dua
kondisi yaitu kondisi “0” dan kondisi “1”. Signal digital yang mewakili informasi
tersebut agar dapat ditransmisikan harus dimodulasi terlebih dahulu dengan
gelombang pembawanya yang akan membawanya sampai ditujuan, cara
perubahan bagi sinyal digital ada beberapa teknik antara lain :
1. Teknik dasar :
Amplitude shift keying(ASK)
Frequency shift keying(FSK)
Phase shift keying (PSK)
2. Varian dari teknik dasar di atas
4 Pulse Amplitude Modulation (4-PAM)
Quadrature Phase ShiftKeying (QPSK)
2.1.1 Amplitude Shift Keying(ASK)
Pembangkitan gelombang AM dapat dilakukan dengan dua pendekatan
berbeda. Pertama adalah dengan membangkitkan sinyal AM secara langsung
tanpa harus dengan membentuk sinyal baseband. Dalam kasus biner, generator
harus mampu memformulasikan satu dari dua sinyal gelombang AM yang
mungkin. Teknik ini lebih dikenal dengan Amplitude Shift Keying (ASK), yang
secara langsung menyiratkan arti sebuah terminologi yang menggambarkan suatu
teknik modulasi digital.
Dengan menggunakan sinyal baseband untuk memodulasi amplitudo suatu
sinyal carrier yang dalam hal ini merupakan sinyal sinusoida (baik cos maupun
sinus), seringkali ini dikenali sebagai AM analog dengan informasi dalam bentuk
digital. Hal yang perlu diperhatikan adalah jangan sampai salah persepsi, bahwa
kedua teknik ini merupakan pembangkitan gelombang AM yang digunakan untuk
mentransmisikan informasi digital. Selanjutnya keduanya ketahui sebagai dua
bentuk pembentukan ASK atau lebih kita pahami sebagai AM digital.
Pada situasi tertentu, memungkinkan sinyal baseband yang ditransmisi
memiliki dua kemungkinan nilai informasi yaitu antara nol (0) dan satu (1).
Karena kemungkinan nilai informasinya tersusun dari dua keadaan tersebut maka
selanjutnya sistem ini kita kenal dengan binary ASK atau kadang lebih disukai
dengan menyebutnya sebagai BASK yang merupakan singkatan dari Binary
Amplitude Shift Keying.
Bentuk sinyal termodulasi dalam hal ini dapat didekati dengan sebuah
Gambar 2.2 Bentuk Gelombang Modulasi ASK 2.1.2 Phase Shift Keying(PSK)
Dalam modulasi analog kita sulit membedakan antara modulasi frekuensi
dengan modulasi fase, sehingga keduanya dikatagorikan sebagai hal yang sama
karena keduanya memiliki pengaruh yang sama pada sinyal carrier yaitu
perubahan frekuensi sesuai dengan variasi amplitudo sinyal informasi yang
memodulirnya.
Dalam kasus modulasi digital perbedaan antara frekuensi modulasi dengan
fase modulasi cukup jelas, karena dalam modulasi digital sinyal informasi
memiliki bentuk gelombang diskrit. Seperti dalam hal modulasi amplitudo dan
modulasi frekuensi, kita memulai dengan sinyal carrier sinusoidal yang memiliki
bentuk dasar Acos[θ(t)].
Dengan adanya proses modulasi pada fase gelombang carrier tersebut
yaitu dengan sistem Phase Shift Keying(PSK) nilai q(t) adalah 2πfc + f(t). Dalam
termodulasi dan mengandung informasi sesuai dengan input dari sinyal baseband
pemodulasinya.
Dalam Binary Phase Shift Keying (BPSK), dua fase keluaran yang
mungkin akan keluar dan membawa informasi. Satu fase keluaran mewakili suatu
logic 1 dan yang lainnya logic 0. Sesuai dengan perubahan keadaan sinyal
masukan digital, fase pada keluaran carrier bergeser diantara dua sudut yang
keduanya terpisah 180°. Nama lain untuk BPSK adalah Phase Reversal Keying
(PRK) dan biphase modulation. BPSK adalah suatu bentuk suppresed carrier,
square wavememodulasi suatu sinyalContinuous Wave (CW).
Diagram blok sederhana sebuah modulator BPSK. Balanced modulator
bekerja seperti suatu switch pembalik fase. Tergantung pada kondisi logic pada
input digital, carrier yang ditransfer ke output pada kondisi inphase (0°) atau
bergeser 180° dengan phase carrier oscillatorreferensi.
Gambar 2.3 Modulator BPSK
2.1.3 Frequency Shift Keying(FSK)
Frequency Shift Keying (FSK) merupakan sistem modulasi digital yang
relatif sederhana, dengan kinerja yang kurang begitu bagus dibandingkan sistem
modulasi FSK, sinyal pemodulasi berupa aliran pulsa biner yang bervariasi
diantara dua level tegangan diskrit sehingga berbeda dengan bentuk perubahan
yang kontinyu pada gelombang analog. Ekpresi yang umum untuk sebuah sinyal
FSK biner adalah:
………..2.2
dimana :
v(t) = adalah bentuk gelombang FSK biner
Vc = puncak amplitudo carrier tanpa termodulasi ωc = carrier frekuensi (dalam radian)
fm(t) = frekuensi sinyal digital biner pemodulasi Δω = beda sinyal pemodulasi (dalam radian)
Dari persamaan diatas dapat dilihat bahwa dengan FSK biner amplitudo
carrier Vc tetap konstan dengan adanya modulasi. Bilamana, output frekuensi
carrier (ωc) akan bergeser dengan suatu nilai sebanding +∆/2 radian. Pergeseran
frekuensi (∆ω /2) adalah sebanding dengan amplitudo dan polaritas pada sinyal
input biner. Sebagai contoh, sebuah biner satu akan bernilai +1 volt dan sebuah
biner nol akan bernilai –1 volt yang menghasilkan pergeseran frekuensi pada +∆ω
/2 dan −∆ω/2. Sebagai tambahan, laju pada pergeseran frekuensi adalah sebanding
dengan setengah laju perubahan sinyal input biner fm(t) (yaitu bit rate input).
Sehingga deviasi (pergeseran) sinyal output carrier diantara C+ ∆/2 dan
C
2.1.4 Modulator FSK
Dengan FSK biner, center pada frekuensi carriertergeser (terdeviasi) oleh
input data biner. Sebagai konsekuensinya, output pada suatu modulator FSK biner
adalah suatu fungsi step pada domain frekuensi. Sesuai perubahan sinyal input
biner dari suatu logic 0 ke logic 1, dan sebaliknya, output FSK bergeser diantara
dua frekuensi: suatu mark frekuensi atau logic 1 dan suatu space rekuensi atau
logic 0. Dengan FSK biner, ada suatu perubahan frekuensi output setiap adanya
perubahan kondisi logic pada sinyal input. Sebagai konsekuensinya, laju
perubahan output adalah sebanding dengan laju perubahan input. Dalam modulasi
digital, laju perubahan input pada modulator disebut bit rate dan memiliki satuan
bit per second (bps). Laju perubahan pada output modulator disebut baud atau
baud rate dan sebanding dengan keterkaitan waktu pada satu elemen sinyal
output. Esensinya, baud adalah kecepatan simbol per detik. Dalam FSK biner, laju
input dan laju output adalah sama; sehingga,bit rate dan baudrate adalah sama.
Suatu FSK biner secara sederhana diberikan seperti Gambar (2.4).
Gambar 2.5 Sinyal Keluaran Modulator FSK 2.1.5 Pertimbangan Bandwidth pada FSK
Sebagaimana sistem komunikasi elektronik yang lain, bandwidth
merupakan hal penting dalam merancang sebuah pemancar FSK. Sistem ini
memiliki kesamaan dengan sistem modulasi FM analog. Gambar (2.6)
memberikan ilustrasi sebuah diagram blok pemancar FSK.
Gambar 2.6 Hubungan Inputdan OutputPada Modulator FSK
Pada Gambar 2.6 menunjukkan sebuah modulator FSK biner, yang mana
memiliki kemiripan dengan modulator FM, dan ini seringkali berupa VCO
(voltage controlled oscillator). Input rate tercepat ada pada perubahan data 1 atau
0 secara beruntun, yang dalam hal ini digambarkan sebagai bentuk gelombang
persegi. Sebagai konsekuensinya, hanya frekuensi fundamental yang dipakai
sebagai acuan. Saat ini terjadi nilai frekuensi modulasi tertinggi sebanding dengan
tepat ditengah diantara frekuensi mark dan space. Sebuah kondisi logika 1
menggeser VCO dari kondisi frekuensi rest menjadi frekuensimark , dan logika
0 menggeser frekuensi VCO dari rest menjadi space. Sebagai onsekuensinya
perubahan keadaan input 1/0 secara berurutan menyebabkan deviasi frekuensi dari
mark ke space. Dalam modulator binary FSK, ∆f merupakan puncak deviasi
frekuensi pada carrier dan nilainya sebanding dengan besarnya beda frekuensi
antara markdan rest. Nilai ini sebanding dengan setengah beda antara markdan
space. Puncak dari deviasi frekuensi tergantung dari amplitudo sinyal pemodulasi.
Dalam sinyal digital biner, semua logika 1 memiliki level tegangan yang
sama, demikian pula halnya dengan semua loghika 0. Sebagai konsekuensinya
pada system FSK memiliki frekuensi deviasi yang konstan dan selalu pada nilai
maksimum.
Gambar 2.7 Gambaran Frekuensi pada FSK
Output pada modulator FSK dikaitkan dengan input biner dapat
ditunjukkan dengan Gambar 2.7 Disini logika 0 berkaitan dengan frekuensi space
(fs), dan logika 1 berkaitan dengan frekuensimark (fm). Sedangkan frekuensi
carrier dinyatakan sebagai fs. Frekuensi deviasi sinyatakan dengan hubungan
...2.3
dimana tb merupakan waktu untuk satu bit dalam satuan detik, sedangkan besarnya fm dan fs dinyatakan sebagai:
………..2.4
Dari Gambar tersebut dapat dilihat bahwa FSK tersusun dari dua
gelombang sinusoida pada frekuensi fm dan fs. Gelombang pulsa sinus memiliki
spectrum frekuensi untuk sinyal FSK yang dapat digambarkan sebagai fungsi (sin
x)/x. Sebagai konsekuensinya, kita dapat mewakili spectrum output untuk sinyal
FSK seperti ditunjukkan pada Gambar 2.6 Bentuk bandwidth pada FSK dapat
didekati sebagai:
………2.5
2.1.6 Demodulator FSK
Rangkaian yang paling umum digunakan untuk demodulasi sinyal FSK
biner adalah phase-locked-loop (PLL), yang ditunjukkan dalam blok diagram
pada Gambar 2.7 Suatu demodulator FSK-PLL bekerja sangat mirip dengan
demodulator PLL-FM. Sesuai input ke PLL bergeser diantara frekuensi markdan
space, dc error voltage pada output fase komparator mengikuti pergeseran
frekuensi. Karena hanya ada dua frekuensi input mark dan space, maka disini
juga hanya ada dua output error voltage. Satu mewakili suatu logic 1’ dan
lainnya mewakili suatu logic 0’. Sehingga, frekuensi natural pada PLL dibuat
sama untuk frekuensi center pada modulator FSK. Sebagai suatu hasil, perubahan
dalam dc error voltage mengikuti perubahan dalam input frekuensi analog dan
simetris disekitar 0 V dc.
Kita mulai dengan menganalisa kinerja pada matched filter coherent yang
dalam hal ini menggunakan correlation detector. Kinerja system correlation
detector untuk system komunikasi biner dinyatakan dalam bentuk persamaan
berikut:
……….2.6
dimana
E = energy
ρ = koefisien korelasi
Penurunan ini didasari asumsi (anggapan) bahwa keduia sinyal memiliki
priority probability yang sama. Untuk aplikasi system FSK, dimana
……….2.7
sehingga E dan ρ diberikan sebagai
……….2.8
Jika kita tetapkan ρ = 0, probability of errornya senilai:
2.2 Pemograman Delphi
Bahasa Pemrograman Delphi merupakan pemrograman Visual (berbasis
windows) yang dibuat oleh sebuah Perusahaan Software Borland .Inc, Fungsi dari
aplikasi ini adalah sama dengan fungsi aplikasi visuallainnya, seperti VB, Foxpro
dan lain-lain.
Delphi dapat menangani pembuatan aplikasi sederhana sampai pada
aplikasi yang berbasis client/server atau jaringan, Delphi dapat dimanfaatkan
untuk membuat aplikasi yang berbasis text, grafik, angka, databasemaupun web.
Bahasa Pemrograman visual mempunyai 2 hal yaitu object dan kode
program, manifestasi dari object adalah berbentuk komponen yang dapat dilihat
(visual), sedangakan kode program merupakan sekumpulan teks yang digunakan
sebagai sebuah perintah yang telah diatur dengan suatu aturan dan mempunyai
suatu tujuan tertentu.
Bahasa pemrograman Delphi merupakan bahasa pemrograman yang
dikembangkan dari bahasa pemrograman Pascal, Pascal berbasis text only
sedangkan Delphi berbasis visual (windows).
Berikut ini sebagian kecil dari banyak kelebihan Borland Delphi 7 :
Berbasis Object Oriented Programming (OOP). Setiap bagian yang ada
pada program dipandang sebagai suatu object yang mempunyai sifat-sifat
yang dapat diubah dan diatur.
Satu file .exe. Setelah program dirancang dalam IDE (Intergrated
langsung didistribusikan dan dijalankan pada komputer lain tanpa perlu
menyertakan file DLL dari luar. Ini merupakan sebuah kelebihan yang
sangat berarti.
Borland Delphi 7 hadir bersama Borland Kylix 3 yang berbasiskan Linux,
sehingga memungkinkan programmer untuk membuat aplikasi
multi-platform.
Gambar 2.10 Tampilan Pada Program Delphi 7
2.3 Motor Stepper
Motor Stepperadalah motor DC yang gerakannya bertahap (step per step)
dan memiliki akurasi yang tinggi tergantung pada spesifikasinya. Setiap motor
stepper mampu berputar untuk setiap stepnya dalam satuan sudut (0.75, 0.9, 1.8),
makin keil sudut per step-nya maka gerakan per step-nya motor stepper tersebut
Motor stepper banyak digunakan untuk aplikasi-aplikasi yang biasanya
cukup menggunakan torsi yang kecil, seperti untuk penggerak piringan disket atau
piringan CD. Dalam hal kecepatan, kecepatan motor stepper cukup cepat jika
dibandingkan dengan motor DC. Motor stepper merupakan motor DC yang tidak
memiliki komutator. Pada umumnya motor stepper hanya mempunyai kumparan
pada statornya sedangkan pada bagian rotornya merupakan magnet permanent.
Dengan model motor seperti ini maka motor stepperdapat diatur posisinya pada
posisi tertentu dan/atau berputar ke arah yang diinginkan, searah jarum jam atau
sebaliknya.
Gambar 2.11 Skema Motor Stepper
Kecepatan motor stepper pada dasarnya ditentukan oleh kecepatan
pemberian data pada komutatornya. Semakin cepat data yang diberikan maka
motor stepper akan semakin cepat pula berputarnya. Pada kebanyakan motor
stepper kecepatannya dapat diatur dalam daerah frekuensi audio dan akan
menghasilkan putaran yang cukup cepat.
Untuk mengatur gerakan motor per step-nya dapat dilakukan dengan 2
Step 2b 1b 2a 1a
1 0 0 0 1
2 0 0 1 0
3 0 1 0 0
4 1 0 0 0
Tabel 2.2 Motor Stepperdengan Gerakan Half Step
Step 2b 1b 2a 1a
Optocoupler merupakan gabungan dari LED infra merah dengan
fototransistor yang terbungkus menjadi satu chips. Cahaya infra merah termasuk
dalam gelombang elektromagnetik yang tidak tampak oleh mata telanjang. Sinar
ini tidak tampak oleh mata karena mempunyai panjang gelombang berkas cahaya
yang terlalu panjang bagi tanggapan mata manusia. Sinar infra merah mempunyai
Gambar 2.12 Skema Optocoupler
LED infra merah ini merupakan komponen elektronika yang
memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi
prasikap maju, LED infra merah yang terdapat pada optocoupler akan
mengeluarkan panjang gelombang sekitar 0,9 mikrometer.
Proses terjadinya pancaran cahaya pada LED infra merah dalam
optocoupler adalah sebagai berikut. Saat dioda menghantarkan arus, elektron
lepas dari ikatannya karena memerlukan tenaga dari catu daya listrik. Setelah
elektron lepas, banyak elektron yang bergabung dengan lubang yang ada di
sekitarnya (memasuki lubang lain yang kosong). Pada saat masuk lubang yang
lain, elektron melepaskan tenaga yang akan diradiasikan dalam bentuk cahaya,
sehingga dioda akan menyala atau memancarkan cahaya pada saat dilewati arus.
Cahaya infra merah yang terdapat pada optocoupler tidak perlu lensa untuk
memfokuskan cahaya karena dalam satu chip mempunyai jarak yang dekat
dengan penerimanya. Pada optocoupler yang bertugas sebagai penerima cahaya
infra merah adalah fototransistor. Fototransistor merupakan komponen elektronika
termasuk dalam golongan detektor optik.
Fototransistor memiliki sambungan kolektor–basis yang besar dengan
cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang
elektron. Dengan diberi prasikap maju, cahaya yang masuk akan menimbulkan
arus pada kolektor.
Fototransistor memiliki bahan utama yaitu germanium atau silikon yang
sama dengan bahan pembuat transistor. Tipe fototransistor juga sama dengan
transistor pada umumnya yaitu PNP dan NPN. Perbedaan transistor dengan
fototransistor hanya terletak pada rumahnya yang memungkinkan cahaya infra
merah mengaktifkan daerah basis, sedangkan transistor biasa ditempatkan pada
rumah logam yang tertutup.
2.5 Komunikasi Serial
Komunikasi data serial sangat berbeda dengan format pemindahan data
pararel. Disini, pengiriman bit-bit tidak dilakukan sekaligus melalui saluran
pararel, tetapi setiap bit dikirimkan satu persatu melalui saluran tunggal.
Dalam pengiriman data secara serial harus ada sinkronisasi atau
penyesuaian antara pengirim dan penerima agar data yang dikirimkan dapat
diterima dengan tepat dan benar oleh penerima. Salah satu mode transmisi dalam
komunikasi serial adalah mode asynchronous. Transmisi serial mode ini
digunakan apabila engiriman data satu karakter tiap pengiriman. Antara satu
karakter dengan yang lainnya tidak ada waktu antara yang tetap. Karakter dapat
yang tidak tentu, kemudian dikirimkan sisanya. Dengan demikian bit-bit data ini
dikirimkan dengan periode yang acak sehingga pada sisi penerima data akan
diterima kapan saja. Adapun sinkronisasi yang terjadi pada mode transmisi ini
adalah dengan memberikan bit-bit penanda awal dari data dan penanda akhir dari
data pada sisi pengirim maupun penerima. Berikut adalah
format pengiriman secara serial.
Gambar 2.13 Format Pengiriman Data Serial
Format data komunikasi serial terdiri dari parameter-parameter yang dipakai
untuk menentukan bentuk data serial yang dikomunikasikan, dimana
elemen-elemennya terdiri dari.
1. Kecepatan data per bit (baud rate).
2. Jumlah bit data pekarakter (data length).
3. Jumlah stop bit dan start bit.
2.6 Mikrokontroler ATMega8535
Mikrokontroller, sebagai suatu terobosan teknologi mikrokontroller dan
microcomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi
baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan
kandungan, transistor yang lebih banyak namun hanya membutuhkan ruang
kecil serta dapat diproduksi secara massal ( dalam jumlah banyak) sehingga
akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggih
serta dalam bidang pendidikan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolahan kata pengolahan angka, dan lain
sebagainya). Mikrokontroller hanya bias digunakan untuk satu aplikasi tertentu
saja. Perbedaan lainnya terletak pada perbandingan RAM dan ROM-nya. Pada
sistem komputer perbandingan RAM dan ROM-nya besar, artinya
program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan
antar muka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan
pada mikrokontroller, perbandingan ROM dan RAM-nya yang besar artinya
program control disimpan dalam ROM yang ukurannya relatif lebih besar,
sedangkan RAM digunakan sebagai tempat penyimpanan sederhana sementara,
termasuk register-register yang digunakan pada mikrokontroller yang
bersangkutan.
Mikrokontroller AT-Mega 8535 merupakan salah satu keluarga dari
MSC-51 keluaran Atmel. Mikrokontroller ini pada prinsipnya dapat digunakan
untuk mengolah data per bit ataupun data 8 bit secara bersamaan. Pada
prinsipnya program pada mikrokontroller dijalankan bertahap, jadi pada
program itu sendiri terdapat beberapa set instruksi dan tiap instruksi itu
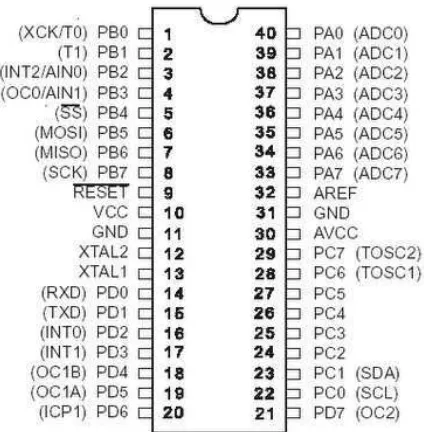
Gambar 2.14 Konfigurasi Pin AT-Mega8535
Beberapa fasilitas yang dimiliki oleh Mikrokontroller AT-Mega 8535
adalah sebagai berikut:
1. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
2. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit.
3. Tiga buah timer counter,dua diantaranya memiliki fasilitas pembanding.
4. CPU dengan 32 buah register.
5. EEPROM sebesar 512 byte.
6. Empat buah programmable port I/O yang masing – masing terdiri dari
delapan buah jalur I/O
7. Memori flash sebesar 8K bit system Self-programable Flash.
8. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika.
9. Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik
Mikrokontroller AT-Mega 8535 hanya memerlukan tambahan 3
kapasitor, 1 resistor dan 1 kristal serta catu daya 5 volt. Kapasitor 10 micro-fard
dan resistor 10 kilo Ohm dipakai untuk membentuk rangkaian riset. Dengan
adanya rangkaian riset ini AT-Mega 8535 otomatis diriset begitu rangkaian
menerima catu daya. Kristal dengan frekuensi maksimum 24 MHz dan
kapasitor 30 mikro-farad dipakai untuk melengkapi rangkaian osilator
pembentuk clock yang menentukan kecepatan kerja Mikrokontroller. Memori
merupakan bagian yang sangat penting pada Mikrokontroller.
2.7 Radio Communication Transceiver
Radio communication transceiver adalah pesawat pemancar radio
sekaligus berfungsi ganda sebagai pesawat penerima radio yang digunakan untuk
keperluan komunikasi. Ia terdiri atas bagian transceiver dan bagian receiver yang
dirakit secara terintegrasi. Pada generasi mula-mula, bagian pemancar atau
transmitter dan bagian penerima atau receiver dirakit secara terpisah dan
merupakan bagian yang berdiri sendiri-sendiri dan bisa bekerja sendiri-sendiri
pula Pada saat ini kedua bagian diintegrasikan dipekerjakan secara bergantian.
Pesawat pemancar sederhana terdiri atas suatu osilator pembangkit getaran
radio dan getaran ini setelah ditumpangi dengan getaran suara kita, dalam teknik
radio disebut dimodulir, kemudian oleh antena diubah menjadi gelombang radio
dan dipancarkan. Seperti kita ketahui bahwa gelombang suara kita tidak dapat
mencapai jarak yang jauh walaupun tenaganya sudah cukup besar, sedangkan
gelombang radio dengan tenaga yang relatif kecil dapat mencapai jarak ribuan
kilometer. Agar suara kita dapat mencapai jarak yang jauh, maka suara kita
ditumpangkan pada gelombang radio hasil dari pembangkit getaran radio, yang
disebut gelombang pembawa atau carrier dan gelombang pembawa tadi akan
mengantarkan suara kita ke tempat yang jauh. Di tempat jauh tadi, gelombang
radio yang terpancar diterima oleh antena lawan bicara kita. Oleh antenanya,
gelombang radio tadi, yang berupa gelombang elektromagnetik diubah menjadi
Gambar 2.16 Blok Diagram Transceiver
2.8 DriverMotor Stepper
Rangkaian ini pada dasarnya hanya merupakan rangkaian switching arus yang mengaliri lilitan pada motor stepper. Urutan pemberian data pada motor stepper ini dapat mengontrol arah putaran dari motor stepper ini. Penambahan kecepatan pada motor stepper dapat dilakukan dengan cara meningkatkan frekuensi pemberian data pada rangkaian switching arus.
Rangkaian kontrol ini nantinya terhubung langsung dengan lilitan pada motor, rangkaian power supplai, dan rangkaian yang dikontrol secara digital yang pada akhirnya menentukan kapan lilitan yang diinginkan dalam kondisi off atau on. Selain hanya menggunakan transistor switching ar, saat ini sudah tersedia driver motor yang memang diperuntukkan bagi motor stepper, yang lebih dikenal dengan H-Bridge. Komponen ini biasanya digunakan pada motor stepper tipe bipolar, walaupun demikian tidak menutup kemungkinan digunakan pada motor stepper tipe yang lain.
30 3.1 Gambaran Umum
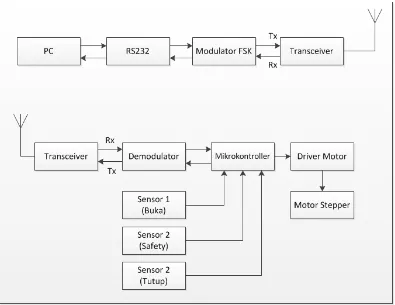
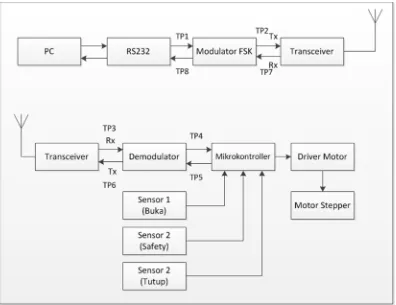
Perancangan sistem ini terdiri dari beberapa bagian, berikut ini adalah blok
diagram dari pengendalian pintu gerbang yang akan dirancang.
Gambar 3.1 Blok Diagram Perancangan Sistem
Komputer (PC) digunakan untuk antarmuka (interface) antara user dan
komputer sebagai pengendali. Pengendali yang dimaksud adalah dengan
menggunakan bahasa pemograman Delphi. Data-data yang diperlukan sistem,
akan dikirimkan oleh komputer (PC) dalam bentuk data digital. Data digital ini
kemudian dimodulasikan menggunakan modulasi FSK yang kemudian akan
FM dan sinyal analog dari fm akan didemodulasi lagi dengan modulasi FSK lalu
keluaran sinyalnya akan dihubungkan ke mikrokontroler guna diolah datanya agar
bisa menjalankan motor supaya gerbang terbuka atau tertutup.
Sensor akan menditeksi apakah kondisi pintu gerbang terbuka atau
tertutup. Sensor ini juga akan mengirim data ke mikrokontroler yang kemudian
akan diinisialisali berdasarkan kondisi serta apabila data cocok sesuai data yang
tersimpan pada mikrokontroler maka mikrokontroler akan mengirimkan data
selanjutnya akan dibaca oleh Personal Computer(PC) sehingga dapat ditampilkan
kondisi pintu gerbang oleh sebuah perangkat lunak (software) pada PC.
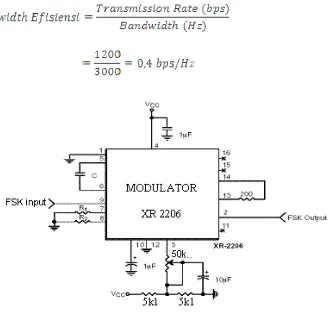
3.2 Perancangan Modulator FSK
Data digital yang dikirimkan secara serial sebelum diteruskan ke pemancar
harus dimodulasikan atau diubah parameternya dari parameter tegangan menjadi
frekuensi. Modulator FSK akan mengubah data yang dikirimkan mikrokontroler
menjadi sinyal sinusiodal dengan frekuensi yang bergantung pada data dari
mikrokontroler. Nilai frekuensi yang dihasilkan bergantung pada nilai R1, R2 dan
nilai C yang merupakan komponen eksternal yang harus ditambahkan pada IC
XR-2206. Nilai frekuensi yang dihasilkan akan sesuai dengan persamaan :
f1= 1/(R1.C)………..………(3.1)
dan
dari persamaan diatas maka f1dan f2dapat dihitung seperti dibawah ini, dengan
harga C = 33 nF serta frekuensinya f1= 1200 dan f2=2200 Hz maka
f1 = 1/(R1.C)
f1merupakan frekuensi yang dihasilkan pada saat input berupa data logika
high, sedangkan f2 merupakan frekuensi yang dihasilkan pada saat input berupa
data logika low. Rangkaian modulator FSK dapat dilihat pada gambar 3.2. Pulsa
logikahigh pada penelitian ini akan setara dengan f1yaitu sebesar 1200 Hz. Nilai
dari C ditetapkan sebesar 33nF, karena itu nilai R1 adalah sebesar 25,2 k ohm.
Sedangkan data logika low akan setara dengan f2 sebesar 2200 Hz, sehingga nilai
R2 adalah 13,7 k ohm. Untuk memudahkan pengesetan dan karena tidak ada nilai
resistor sebesar itu maka untuk R1 dan R2 digunakan resistor variabel 50 k ohm
untuk R1dan 20 k ohm untuk R2.
Dari frekuensi yang yeng telah diketahui maka dapat dilakukan
perhitungan untuk mengetahui indeks modulasi, deviasi frekuensi, bandwith, serta
bandwidth efisiensinya. Untuk perhitungan indeks modulasi adalah sebagai
Untuk deviasi frekuensi
Dan bandwidth efisiensinya :
Gambar 3.2 Rangkaian Modulator FSK
3.3 Perancangan Demodulator FSK (XR 2211)
Rangkaian demodulator FSK menerima sinyal yang berasal dari receiver.
Seperti pada waktu dipancarkan, sinyal ini berupa sinyal sinusiodal yang
berubah-ubah frekuensinya sesuai dengan data yang dikirimkan. Demodulator akan
mengubah kembali sinyal sinusoidal tersebut menjadi sinyal digital (biner).
menghasilkan output logika high, sedangkan frekuensi input yang kurang dari
frekuensi tengah akan menghasilkan output logika low. Frekuensi tengah
ditentukan dengan mengatur besarnya hambatan pada R0 dan besarnya C0
(kondensator yang terhubung pada pin 13 dan 14 IC XR 2211). Nilai frekuensi
tengah ditentukan berdasarkan nilai kedua frekuensi yang dihasilkan oleh
modulator FSK. Penentuan nilai frekuensi tengah dihitung dengan persamaan :
……….(3.3)
Pemilihan nilai R0dan C0dilakukan berdasarkan persamaan :
f0= 1/(R0.C0)………....(3.4)
,8
Selanjutnya mencari harga R0
f0= 1/(R0.C0)
1624,8 = 1/(R0.33n)
R0 = 1/1624,8.33n
= 18.705,57
Nilai f1 dan f2 berturut-turut adalah 1200 Hz dan 2200 Hz sehingga
didapatkan nilai f0 adalah sebesar 1624,8 Hz. Berdasarkan nilai f0 ini, ditentukan
digunakan dalam rangkaian adalah variabel resistor 20 k ohm sehingga dapat
diubah-ubah nilainya untuk pengesetan.
Gambar 3.3 Rangkaian Demodulator FSK
3.4 Rangkaian Antarmuka Serial Max232
Data yang berasal dari demodulator FSK adalah pada level tegangan TTL
(Transistor Transistor Logic), sedangkan komputer hanya dapat menerima data
dalam bentuk level tegangan RS232. Oleh karena itu digunakanlah IC MAX232
yang dapat mengubah level tegangan TTL menjadi level tegangan RS232 dan
sebaliknya sehingga data dapat terbaca. Seperti kita ketahui bahwa level tegangan
pada TTL adalah antara 0 sampai 5 volt, dimana tegangan 0 volt mewakili kondisi
low dan 5 volt mewakili kondisi high.Sedangkan pada RS232 level tegangannya
berkisar antara -3 sampai 25 volt. Gambar 3.4 merupakan gambar aplikasi dari IC
Gambar 3.4 Antarmuka serial RS232 dengan IC MAX232
Komunikasi serial membutuhkan port sebagai saluran data, salah
satunya dengan menggunakan port serial DB9.
3.5 Rangkaian Sensor Optocoupler
Sensor cahaya yang digunakan adalah optocoupler yang prinsip kerjanya
adalah ketika ada benda yang berada di antara celah sensornya, maka cahaya yang
dikirimkan tidak bisa diterima oleh bagian penerimanya, sehingga menghasilkan
tegangan keluaran yang nilainya mendekati VCC, begitu juga sebaliknya, jika
tidak ada benda diantara celah sensornya maka akan menghasilkan tegangan
keluaran yang nilainya mendekati 0 Volt.
R1
100R
R2
1k
R3
4k7 VCC
OUT
3.6 Driver Motor Stepper dengan IC ULN2003
Motor stepper memiliki beberapa kebutuhan standar yang harus dipenuhi
agar dapat bekerja dengan baik, antara lain:
1. Tegangan arus yang memadai untuk setiap lilitan untuk langkah tiap step
2. Lama tegangan/arus yang harus diberikan untuk setiap langkah atau step.
Hal ini diperlukan untuk memberikan waktu yang cukup bagi torsi (tarikan
antar kutub yang berlawanan) untuk memindahkan posisi kutub tadi ke
posisi yang paling dekat dengan kutub stator (lilitan).
Kebutuhan ini berbeda-beda untuk setiap motor stepper. Makin singkat
waktu pemberian tegangan/arus yang dibutuhkan, makin tinggi kecepatan
maksimum motor stepper tersebut dapat dioperasikan. Dalam perancangan
rangkaian motor stepper ini digunakan IC ULN2003, yang dapat mengemudikan
motor stepper dengan tegangan maksimum mencapai 50 V dan arus 500 mA. IC
ini memiliki 7 untai penguat transistor tipe Darlington yang dioperasikan sebagai
rangkaian switching. Input sesuai dengan berbagai tipe logika.
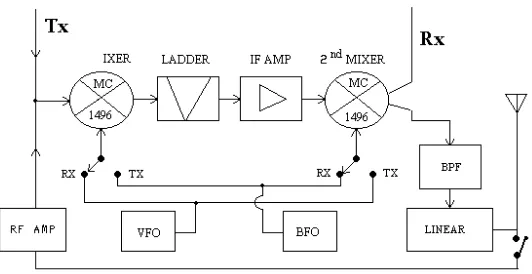
Radio Transceiver FM digunakan sebagai device yang dapat mengirim
serta menerima sinyal modulasi yang ditransmisikan melalui media udara. Sinyal
modulasi yang dipancarkan Radio Frequency FM dibagian transmitter ke udara
kemudian diterima oleh Radio Frequency FM dibagian receiver. Kemudian sinyal
modulasi yang sudah diterima Radio Frequency FM dibagian penerima disalurkan
ke input demodulator untuk melalui proses selanjutnya sampai sinyal termodulasi
tersebut menjadi sinyal informasi kembali, begitupun selanjutnya bila transceiver
FM dibagian penerima berubah fungsi sebagai transmitter.
Gambar 3.7 Rangkaian pada Transceiver
3.7 Perancangan Bentuk Pintu Gerbang
Dibawah ini adalah bentuk fisik dari pintu gerbang yang akan buat. Pintu
gerbang dalam perancangan ini bergerak secara horizontal pada pintu dipasang rel
Gambar 3.8 Perancanaan Bentuk Pintu Gerbang
Seperti pada gambar diatas sensor 1 digunakan untuk mendeteksi kondisi pintu
terbuka, dan sensor 2 untuk mendeteksi kondisi pintu tertutup. Sedangkan
pembatas digunakan agar pintu gerbang bergerak lurus,
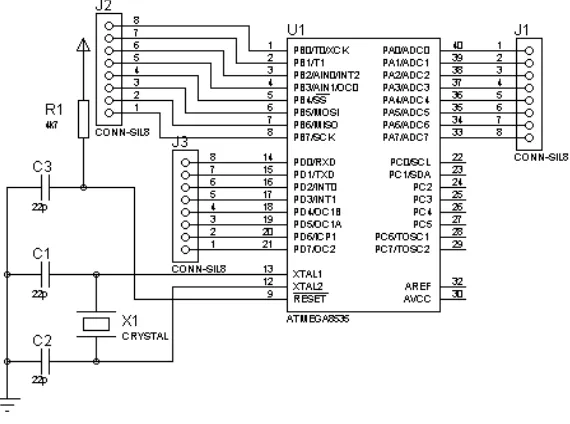
3.8 Rangkaian ATMega8535
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang
ada. Komponen utama dari rangkaian ini adalah Mikrokontroler ATMega8535.
Pada mikrokontroler inilah semua program diisikan, sehingga rangkaian dapat
berjalan sesuai dengan yang dikehendaki. Mikrokontroler ini merupakan suatu
keping IC dimana terdapat mikroprosesor dan memori program (ROM) serta
memori serbaguna (RAM), bahkan ada fasilitas ADC, PLL, EEPROM dalam satu
kemasan.
Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan populer.
Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel, Microchip,
Winbond, Atmel, Philips, Xemics danlain-lain. Dari beberapa vendor tersebut,
lebih lanjut.
ATMega8535 adalah mikrokontroler CMOS 8-bit berbasis AVR dengan
konsumsi daya rendah yang dikembangkan dari arsitektur RISC. Dengan Instruksi
yang dapat dijalankan dalam satu siklus clock, ATMega8535 mempunyai
throughputs sistem 1 MIPS per MHz.
ATMega8535 mempunyai 32 register yang secara langsung terhubung
dengan Arithmatic Logic Unit (ALU). Mikrokontroler ATMega8535 juga
dilengkapi dengan port serial, yang memungkinkan bagi kita mengirimkan data
dalam format serial. Mikrokontroler ATMega8535 mempunyai 40 pin dengan
catu daya tunggal 5 volt. Ke-40 pin dalam keluarga mikrokontroler ATMega8535
digambarkan sebagai berikut:
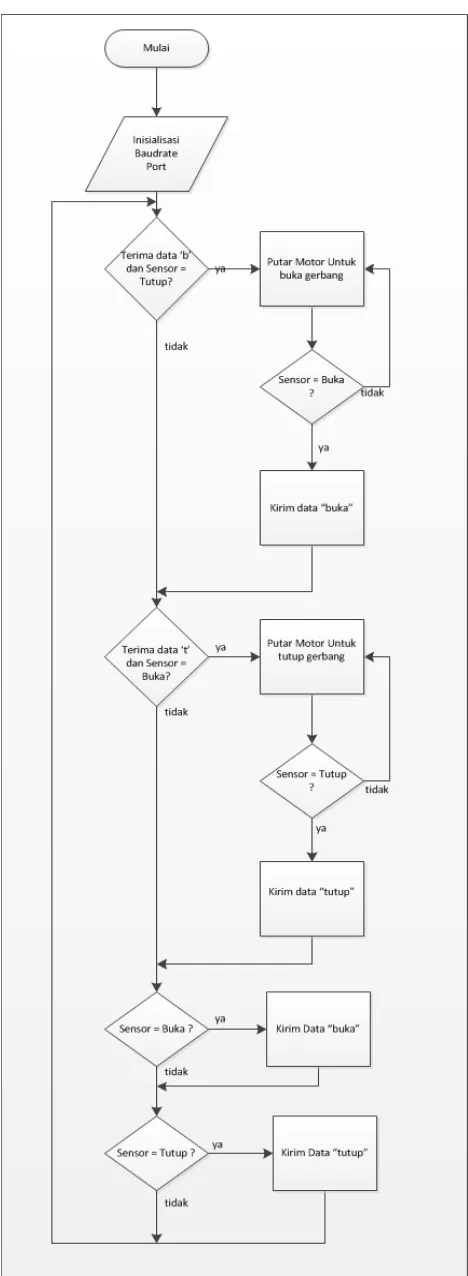
inisialisasi baudrate. Jika tombol buka ditekan atau terima data “BG” dari Port D0
atau kondisi gerbang tertutup, jika semua memenuhi akan menjalankan motor
searah jarum jam lalu saat motor berjalan akan membaca kondisi dari pintu jika
sensor terdeteksi maka motor akan berhenti tetapi jika motor akan tetap berjalan.
Akan tetapi jika tombol tidak ditekan dan mikro tidak menerima data dari
Port D0 tetapi menerima data dari sensor maka kirim data untuk menampilkan
kondisi pintu gerbang.
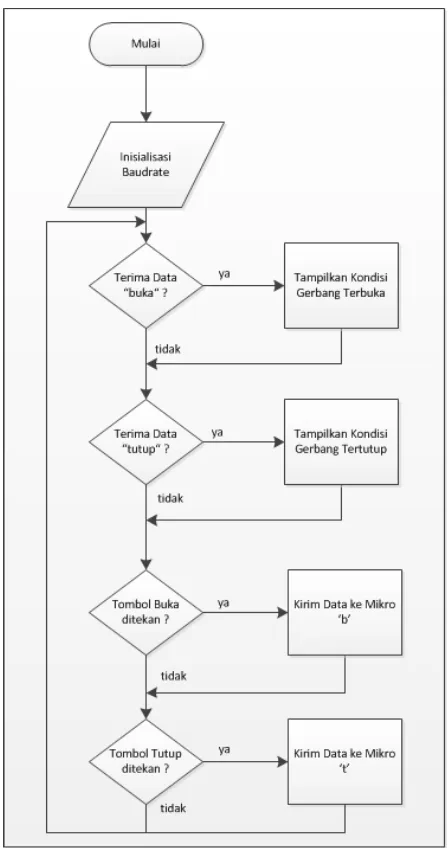
3.9 Perangkat Lunak (Software)
Perangkat lunak yang digunakan untuk pengendalian pintu gerbang ini
yaitu Borland Delphi 7. Perangkat lunak ini bersifat interface jadi selain untuk
mengendalikan pintu gerbang juga untuk menampilkan status pintu terbuka atau
tertutup.
Berikut ini tampilan dari pemograman Delphi yang di buat dalam
perancangan.
Gambar 3.12 Diagram Alur dari Pemograman Delphi
Penjelasan dari diagram alur diatas yaitu jika menerima data B maka akan
menampilkan kondisi pintu terbuka dan T untuk menampilkan kondisi pintu
tertutup. Jika tombol buka ditekan makan akan mengirimkan data BG untuk
membuka pintu gerbang dan jika tombol tutup ditekan akan mengirimkan data TG
45
Pada bab ini memperlihatkan pengujian dari seluruh sistem. Pengujian ini
dilakukan dengan tujuan untuk mengetahui apakah masing-masing blok serta
keseluruhan sistem dapat bekerja sesuai dengan yang diharapkan.
Gambar 4.1 Titik Pengukuran Tiap Blok Diagram
Ket : TP = Titik Pengukuran / Test Point
Karena pada tugas akhir ini menggunakan komunikasi dua arah maka
pengujian dilakukan satu arah terlebih dahulu dimana komputer akan mengirim
data untuk menjalankan motor. Lalu selanjutnya komputer yang akan menerima
4.1 Pengukuran dan Pengujian Untuk Arah Pertama
Pengukuran dan pengujian ini dilakukan untuk mengetahui sinyal keluaran
dari tiap blok diagram maupun keseluruhan sistem saat komputer mengirim data
untuk menjalankan motor untuk membuka atau menutup pintu gerbang.
4.1.1 Pengujian Program Delphi
Pengujian program dilakukan bertujuan untuk mengetahui apakah program
dapat berkerja sesuai yang diharapkan yang dalam hal ini untuk mengirim data
untuk mengendalikan motor.
Gambar 4.2 Tampilan Program Pengujian
Program dibuat sesuai dengan sistem yang akan dibuat atau sesuai dengan
cara kerja alat. Program bekerja secara interface dan akan mengirim data melalui
digunakan untuk menutup pintu gerbang.
Penjelasan dari uraian list program diatas adalah komponen Comport akan
aktif saat program dijalankan, lalu jika button1 ditekan maka mengirimkan data
karakter ‘b’ tombol button2 tidak aktif dan jika button2 ditekan maka akan
mengirimkan data karakter ’t’ dan button1tidak aktif.
4.1.2 Pengukuran dan Pengujian Rangkaian Max232
Pengujian ini bertujuan untuk mengetahui sinyal data keluaran dari
komputer yang akan dimodulasikan dan juga mendeteksi koneksi mikrokontroler
ke PC. Untuk pengujian Rangkaian RS232 ini dilakukan dengan cara
dilakukan yaitu mengatur baudrate pada 1200 bps dan flow control pada off.
Setelah itu rangkaian RS232 dihubungkan ke mikrokontroler yang telah diisi
program untuk menyalakan LED dengan cara menekan ‘b’ pada keyboard untuk
kondisi menyala dan ‘t’ untuk kondisi mati.
Gambar 4.3 Setting Pengukuran Sinyal Keluaran Rangkaian Max232
Gambar 4.4 Bentuk Sinyal Keluaran dari Max232 saat Tombol Buka ditekan.
Gambar 4.5 Bentuk Sinyal Keluaran dari Max232 saat Tombol Tutup ditekan. Personal
computer
Rangkaian RS232
Rangkaian Max232 berfungsi untuk mengkonversi tegangan level RS232 ke level
tegangan TTL maka keluaran dari Rangkaian Max232 berupa data digital yang
dapat dimodulasikan menggunakan modulasi FSK.
4.1.3 Pengukuran Modulator FSK
Pengujian pada bagian ini bertujuan untuk mengetahui apakah modulator
sudah dapat menghasilkan sinyal sinusoidal dengan frekuensi 1200 Hz dan 2200
Hz. Input logic high pada modulator didapat dengan cara memberikan tegangan
sebesar 5 volt, sedangkan input logic low dengan cara menghubungkan input
modulator ke ground.
Gambar 4.6 Cara Pengukuran Modulator FSK
Pengesetan modulator agar dapat menghasilkan frekuensi 1200 Hz pada
saat diberi logic 1 adalah dengan cara memutar resistor variabel yang terhubung
ke kaki 7 pada IC XR2206, sedangkan untuk menghasilkan frekuensi 2200 Hz
pada saat diberi logic 0 dilakukan dengan memutar resistor variabel yang
terhubung ke kaki 8 XR2206. Hasil dari pengukuran dapat dilihat pada gambar
Gambar 4.7a Bentuk Sinyal Pada Saat Logic High
Gambar 4.7b Bentuk Sinyal Keluaran Saat Logic Low
Gambar 4.8 Sinyal FSK Keluran dari Modulator dengan Masukan Data
Clock
Sinyal keluaran akan berbentuk sinyal FSK ketika diberi input yang
kHz. Hasil yang diperoleh adalah modulator dapat menghasilkan sinyal FSK yang
kombinasi dari frekuensi 1200 Hz dan 2200 Hz.
Gambar 4.9 Sinyal keluaran FSK dengan Input Data dari Rangkaian Max232
Dilihat dari hasil pengukuran frekuensi dari sinyal keluaran modulator
terjadi perbedaan, menurut perhitungan frekuensi sinyal keluaran seharusnya
1624,8 Hz dan pada pengukuran frekuensi dari sinyal keluaran FSK yaitu 1465
Hz. Hal ini disebabkan oleh masih adanya noise yang terjadi akibat bahan PCB
dan juga pada kabel penghubung yang masih ada yang longgar maupun redaman
dari media.
4.1.4 Pengukuran Tranceiver FM
Pengujian ini bertujuan untuk melihat perubahan yang terjadi pada sinyal
FSK apabila ditransmisikan melalui transceiver FM. Pada pengujian kali ini data
yang dikirimkan melalui function generator dengan frekuensi data sebesar 1 kHz.
Gambar 4.11 Setting Pengujian Transceiver FM
Gambar 4.12 Bentuk Sinyal Keluaran dan Spektrum dari Transceiver FM
Perubahan terlihat pada ampliduto sinyal keluaran pada bagian transceiver
di penerima terjadi perdaman pada amplitudo menjadi 1,03 Volt yang awalnya
1,87 Volt. Dikarenakan antena yang digunakan masih berupa kabel yang
impedansinya kurang dari 50 Ω tidak sesuai dengan ketentuan dari transceiver
yang harus menggunakan impedansi 50 Ω.
Setelah pengukuran dengan menggunakan dengan input dari function
generator, lalu dicoba pengukuran dengan input dari modulator FSK agar
Jarak Pemancar
Gambar 4.13 Bentuk Sinyal Keluaran dari Transceiver
Pengujian transceiver FM dapat bekerja tetapi masih terdapat noise yang
cukup besar yang mengakibatkan data yang diterima kurang bagus. Untuk jarak
maksimal yang dapat dipancarkan yaitu sekitar 11 meter. Dan agar frekuensi tidak
berubah akibat thermal maka dipasang heatsink dikomponen transceiver. Karena
4.1.5 Pengujian Demodulator FSK
Demodulator adalah bagian mengubah sinyal hasil modulasi oleh
modulator menjadi sinyal sebelum dimodulasi. Dengan kata lain output dari
demodulator ini sama dengan data input dari modulator.
Gambar 4.14Setting Pengukuran Demodulator FSK
Pada pengujian ini input demodulator merupakan sinyal FSK output dari
rangkaian modulator. Supaya demodulator dapat menerima dan demodulasikan
sinyal FSK yang diterima, maka VCO yang ada pada rangkaian demodulator perlu
diatur dengan cara memutar VR1 pada rangkaian. Hasil yang didapat pada
rangkaian demodulator ini berupa sinyal kotak seperti sinyal input pada
modulator.
Tahap pengukuran pada pengukuran demodulator ini yang pertama input
dari modulator di hubungkan ke ground maka akan menghasilkan keluaran 0 Volt.
Yang kedua input dari modulator dihubungkan ke 5 volt, hasil keluarannya pun
harus 5 Volt dc. Setelah kedua ketentuan terpenuhi selanjutnya dimasukan input
Gambar 4.15a Sinyal Keluaran Demodulator saat Modulator diberi input logic0
Gambar 4.15b Sinyal Keluaran Demodulator saat Modulator diberi Input Logic1
Tabel 4.2 Pengukuran Demodulator
Input Modulator Output Demodulator
0 = Ground 0 = Ground
1 = 5 Volt 1 = 5 Volt
Dari hasil pengukuran dan tabel pengukuran maka dapat diketahui bahwa
demodulator dapat bekerja sesuai dengan yang diharapkan apabila media
Gambar 4.16 Sinyal Keluaran Demodulator Saat Modulator diberi Inputdari
Function Generator
Setelah pengukuran dari input function generatordianggap sesuai dengan
yang diharapkan dimana sinyal input dari modulator sama dengan sinyal output
dari demodulator selanjutnya dilakukan pengukuran dengan sinyal masukan dari
Personal Computer(PC) yang dihubungkan ke rangkaian Max232.
Gambar 4.17 Sinyal Keluaran Demodulator Saat Modulator diberi Inputdari Rangkaian Max232
Hasil yang didapat dari demodulator sama dengan input pada modulator
yaitu berupa sinyal data dengan frekuensi yang sama. Sinyal keluaran dari
ms. Sedangkan untuk perbedaan amplitudo gelombang yang berbeda terjadi
karena output dari modulator FSK melalui rambatan gelombang sehingga terjadi
redaman pada amplitudo.
4.1.6 Pengujian Sistem Minimum Mikrokontroler
Pengujian ini dilakukan dengan mencoba program mikrokotroler yang
telah dibuat. Program ini dibuat disesuaikan dengan sistem yg telah dibuat. Disini
program dibuat sesuai dengan cara kerja alat jadi inputan dari secara interface
Dari uraian program diatas, dapat dijelaskan bahwa jika mikrokontroler menerima
data ‘b’ dari PC maka PORTD akan keluaran untuk menggerakan motor yang
berputar searah jarum jam dengan delay 20ms. Semakin kecil delay makan motor
4.1.7 Pengujian Driver Motor
Hasil pengujian driver motor ini bertujuan untuk untuk mengetahui
kondisi output atau keluaran dari rangkaian driver motor saat memberi perintah ke
motor stepper untuk bergerak.
Langkah pengukuran untuk pengujian driver motor stepper dengan cara
memasukan dari 4 inputan diberikan secara bergantian. Data input driver motor
ini berasal dari mikro yang diset seperti tabel di bawah ini.
Tabel 4.3 Hasil Pengujian Driver Motor Stepper
Masukkan Kondisi Kumparan
diharapkan. Dimana tegangan dari input dapat dilewatkan oleh rangkaian driver
motor ini.
4.1.8 Analisa Sistem
Secara keseluruhan dari pengiriman data menggunkan media udara mengalami
bebarapa kendala diantaranya yaitu sinyal keluaran dari demodulator terjadi
pergeseran fasa dibandingkan dengan input modulator. Hal ini tidak berpengaruh
terhadap data karena data sama dengan data yang dimodulasikan akan tetapi
Pengukuran untuk arah yang kedua dilakukam untuk mengetahui proses
pengiriman data dari mikrokontroler ke PC dan dilakukan dengan cara mengukur
sinyal keluaran dari tiap blok serta keseluruhan dari pengiriman data dari
mikrokontroler ke PC yang akan ditampilkan pada program aplikasi yang dibuat.
4.2.1 Pengukuran Mikrokontroler
Tujuan pada pengukuruan ini yaitu untuk mengetahui bentuk data dari
mikrokontroler yang akan dimodulasikan. Pengukuran dilakukan dengan
menggunkan software hyperterminal dimana apabila menekan tombol ‘b’ pada
keyboard akan menyalakan led dan apabila menekan tombol t makan led akan
padam.
Gambar 4.17SettingPengukuran Tx Mikrokontroler
Dibawah ini adalah list program yang digunakan untuk pengujian sinyal
PORTC = 0; printf ("T"); }
Gambar 4.18 Sinyal Keluaran dari Mikrokonroler
Hasil pengukuran dari tx mikrokontroler sesuai dengan yang diharapkan karena
keluran berbentuk sinyal digital atau TTL.
4.2.2 Pengukuran Sensor Optocoupler
Pengujian rangkaian sensor bertujuan untuk melihat apakah sensor dapat
bekerja dengan baik karena sensor merupakan bagian penting dari sistem. Sensor
yang digunakan adalah sensor optocoupler yang merupakan sebuah sensor
infrared LED dan phototransistor.
Prinsip kerja dari sensor ini yaitu ketika phototransistor menerima
pancaran dari infrared maka keluaran dari sensor bernilai 0,36 volt dan apabila
phototransistor tidak menerima pancaran dari infrared maka keluarannya 4,5 volt.
Untuk pengukuran sensor ini dilakukan dengan cara mengukur keluaran dari
Kondisi Tidak
oleh mikrokontroler yang menerima logic 1 mulai dari 2,7 Volt.
4.2.3 Pengukuran Modulator FSK
Pengujian dilakukan dengan menggunakan LED terlebih dahulu
penjelasan dari list progrsm di atas jika button1 ditekan maka led akan menyala
dan apabila button 2 ditekan maka led akan mati. Pengukuran dilakukan dengan
cara mengukur output dari modulator. Sinyal masukan pada modulator berasal
dari pin 13 pada mikrokontroler, yang berfungsi sebagai Tx dari mikrokontroler
Gambar 4.19 Setting Pengukuran Modulator FSK Mikrokontroler Modulator Osiloskop
Gambar 4.20 Sinyal Keluaran dari Modulator
Dilihat dari hasil pengukuran keluaran dari modulator bahwa frekuensi
keluaran dari modulator sesuai dengan yang diharapkan. Karena modulator dapat
bekerja menpresentasi bit 0 dan bit 1.
4.2.4 Pengukuran Transceiver FM
Pengujian ini bertujuan untuk melihat perubahan yang terjadi pada sinyal
FSK apabila ditransmisikan melalui transceiver FM. Pengukuran yang dilakukan
yaitu dengan menghubungkan mikrokontroler ke modulaton yang kemudian
dihubungkan kembali pada pemancar FM yang kali ini menggunakan transceiver.
Gambar 4.21 Setting Pengukuran Transceiver FM
mikrokontroler Modulator FSK Transceiver FM Osiloskop
Gambar 4.22 Sinyal Keluaran dari Transceiver
Dilihat dari gambar hasil pengukuran, perbedaan dengan pengukuran yang
pertama yaitu terletah pada frekuensi keluarannya. Pada pengukuran kali ini
frekuensi lebih tinngi dibanding pengukuran dengan yang sebelum nya.
4.2.5 Pengukuran Demodulator FSK
Tujuan pada pengukuran ini adalah untuk mengetahui sinyal dari
demodulator . pengukuran demodulator dilakukan dengan menghubungkan sinyal
keluaran dari modulator. Segingga dapat menghasilkan sinyal data yang dikirim
melalui modulasi FSK dan dipacarkan dengan menggunakan transceiver FM.
Gambar 4.23 Setting Pengukuran Demodulator FSK
Mikrokontroler Modulator FSK Transceiver FM di Pengirim
Transceiver FM di Penerima Demodulator
\
Gambar 4.24 Sinyal Keluaran dari Demodulator FSK
Pada pengukuran ini pun pada sinyal keluaran dari demodulator terdapat
perbedaan fasa, akan tetapi perbedaan fasa tidak berpengaruh terhadap data yang
diterima yang penting data yang dikirim sama dengan data yang diterima.
4.2.6 Pengujian Program Delphi
Pada pengujian ini program delphi difungsikan untuk membaca data dari
komputer yang kemudian menampilkan kondisi pintu gerbang. Pengujian
dilakukan dengan cara memasukan program untuk membaca input melalui RS232.
procedure TForm1.ComPort1RxChar(Sender: TObject; Count: Integer);
var
data:string; begin
Comport1.ReadStr(data,count); label1.caption := data;
akan mengkonversi data ke format string. Dan jika diterima maka akan
ditampilkan pada label1.
Gambar 4.25 Tampilan Program saat Menerima Data.
Dari hasil pengujian program delphi sudah dapat bekerja sesuai dengan
yang diharapkan dimana dapat mengirim dan menerima data dari luar dengan cara
interface.
4.3 Pengujian Keseluruhan
Secara elektronis alat dapat bekerja dengan baik, pemograman delphi
dapat mengirim serta bisa menerima data ke mikrokontroler dengan sistem
nirkabel sehingga dapat menggerakan motor searah jarum jam maupun
berlawanan arah jarum jam dan sensor jika terdeteksi akan pada kondisi untuk
membuka gerbang maka motor akan berhenti begitupun untuk kondisi tertutup.
Dan apabila pada saat pintu tertutup sensor safety terditeksi maka motor akan
Tabel 4.4 Pengujian Kinerja Pengoprasian
No Aktivitas Respon Sistem
1 Nyalakan Power - Lampu indikator pada
rangkaian nyala
- Kondisi motor tidak bergerak - Kondisi pintu gerbang tertutup - Sensor kondisi tutup terditeksi 2 Buka Pintu pada program aplikasi
ditekan
- Motor bergerak searah jarum jam
- Sensor kondisi buka terdeteksi maka motor berhenti berputar 3 Tutup Pintu pada program
aplikasi ditekan
4 Kondisi Pintu sedang menutup sensor safety terdeteksi
Motor akan menggerakan pintu kembali pada kondisi terbuka.
Setelah dilakukan pengujian dapat diketahui bahwa pengendalian pintu ini
dapat bekerja, yaitu dimana kita menekan tombol buka pada program aplikasi
maka pintu gerbang akan bergerak sampai kondisi pintu terbuka begitupun pada
saat tombol tutup ditekan.
Namun masalah terjadi apabila data di demodulator FSK tidak sesuai
dengan data input dari modulator FSK karena disebabkan dari pemancar FM yang
belum stabil sehingga masih ada data yang dirim tidak sesuai dengan yang
67 5.1 Kesimpulan
Dari analisa dan pembahasan yang telah dilakukan maka dapat diambil
beberapa kesimpulan antara lain:
1. Pengendali pintu gerbang dapat bekerja untuk dengan jarak maksimum
pengirim dan penerima 11 meter.
2. Dari hasil pengukuran dan tabel pengukuran maka dapat diketahui bahwa
demodulator dapat bekerja sesuai dengan yang diharapkan apabila media
komunikasi antara modulator dan demodulator masih menggunakan media
kabel.
3. Untuk pengiriman data menggunakan modulasi FSK baudrate
maksimumnya hanya 1200bps yang menyebabkan terjadinya delay pada
respon motor. Jadi pada saat tombol buka atau tutup ditekan maka motor
tidak akan langsung bergerak tetapi ada delay sekitar 0.6 detik.
4. Berdasarkan hasil pengujian tingkat kesalahan yang dihasilkan sistem
wireless ini terdapat pada pemancar FM yang belum stabil sehingga data
yang dirim tidak sesuai dengan yang diterima.
5. Sensor pengaman (safety) dapat bekerja dengan baik. Apabila pintu sedang
menutup sensor pengaman terdeteksi maka pintu akan kembali terbuka dan
5.2 Saran
Adapun saran-saran dari yang penulis ajukan adalah sebagai berikut.
1. Pada pemograman aplikasi untuk membuka atau menutup gerbang juga
dapat mengembangkan atau ditambahkan aplikasi lainnya seperti
monitoring ruangan menggunakan komunikasi nirkabel.
2. Sebaiknya alat ini dikembangkan lagi karena bisa menggunakan sistem
modulasi digital yang lain seperti modulasi GMSK, BPSK, DPSK atau
yang lainnya.
3. Ada baiknya menggunakan suatu pemancar FM yang memiliki frekuensi
lebih stabil, misalkan menggunakan pemancar FM dengan osilator PLL