PENGGUNAAN TAHANAN MULA UNTUK MENGATUR START
MOTOR ARUS SEARAH SHUNT SECARA OTOMATIS
O
L
E
H
DEPARTEMEN TEKNIK ELEKTRO PPSE
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
INDAH PERMATASARI
NIM : 060422019
ABSTRAK
Motor DC sangat dikenal karena penggunaanya yang sangat luas. Dengan
melakukan berbagai penggabungan lilitan medan yang literal secara shunt, seri maupun
secara terpisah, dapat dirancang suatu motor yang menampilkan kecepatan momen-kakas
yang bermacam-macam. Untuk motor arus searah yang kapasitasnyacukup besar, pada
waktu menjalankan motornya tidak dapat dihubungkan langsung dengan sumber
tegangan DC. Hal ini disebabkan tahanan jangkar relatif rendah, sehingga apabila
dihubungkan langsung dengan sumber DC akan menimbulkan arus mula besar yang
dapat mengakibatkan kerusakan pada motor serta mengganggu kestabilan operasi
peralatan lain, maka diperlukanlah penambahan tahanan mula untuk mengurangi arus
startnya.
Oleh karena itu, dalam penulisan tugas akhir ini akan dibahas tentang penggunaan
KATA PENGANTAR
Puji dan syukur penulis ucapkan atas kehadirat ALLAH SWT atas berkat dan
rahmat-Nya sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul :
STUDI PENGGUNAAN TAHANAN MULA UNTUK MENGATUR
START MOTOR ARUS SEARAH SHUNT SECARA OTOMATIS
Penulisan Tugas Akhir ini merupakan salah satu syarat bagi penulis untuk
memperoleh Gelar Sarjana Teknik di Departemen Teknik Elektro, Fakultas Teknik,
Universitas Sumatera Utara.
Penulis menyampaikan rasa terima kasih atas bimbingan, dukungan dan bantuan
yang telah diberikan oleh berbagai pihak sehingga penulisan Tugas Akhir ini dapat
selesai dengan baik. Untuk itu dengan penuh ketulusan dan kerendahan hati, penulis
menghaturkan terima kasih kepada :
1. Allah SWT, yang telah memberikan Rahmat dan Hidayah nya kepada penulis
hingga saya dapat menyelesaikan tugas akhir ini.
2. Teristimewa kedua Orang Tua Penulis Ayahanda MS. HIDAYAT dan Ibunda
SUWARTI SAID yang senantiasa selalu berdoa, berdzikir dan bersabar untuk
memberi dukungan moril, spiritual, dan material yang tidak akan ada habis nya
dan tidak ternilai harganya.
3. Bapak Ir.Mustafrind Lubis, selaku dosen pembimbing dan dosen wali penulis
yang telah membantu dari awal perkuliahan sampai penyelesaian Tugas Akhir
ini.
5. Seluruh Staf Pengajar dan Seluruh Karyawan di Departemen Teknik Elektro
Fakultas Teknik USU
6. Mhd. Muhariadi yang telah memberikan perhatian, doa, cintanya, serta selalu
berbagi cerita, canda dan tawa.
7. Teman-teman seperjuangan Departemen Teknik Elektro ekstensi 06 terima
kasih atas dukungannya.
Penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, masih banyak
kesalahan dan kekurangan baik dari segi isi maupun susunan bahasanya. Saran dan kritik
dari pembaca dengan tujuan menyempurnakan dan mengembangkan kajian dalam bidang
ini sangat penulis harapkan.
Akhir kata, penulis berharap semoga tugas akhir ini bisa bermanfaat dan
menambah wawasan bagi para pembacanya.
Medan, Oktober 2010
Penulis
DAFTAR ISI
Kata
Pengantar...i
Abstrak...iii
Daftar isi ...iv
BAB I : PENDAHULUAN I.1 Latar Belakang...1
I.2 Rumusan Masalah...2
I.3 Batasan Masalah...2
I.4 Tujuan Penulisan ...2
I.5 Metode Penulisan ...3
I.6 Sistematika Penulisan...3
BAB II : LANDASAN TEORI II.1 Umun...5
II.2 Konstruksi Motor Arus Searah...5
II.3 Motor Arus Searah...8
II.4 Prinsip Motor Arus Searah...10
II.4.1 Motor DC Penguatan Terpisah...12
II.4.2 Motor DC Shunt...14
II.4.3 Motor DC Seri...15
II.5 Operasi Motor Arus Searah...17
III.2 Cara Asutan (Starting) Dengan Disambung Langsung...19
III.3 Cara Asutan (Starting) Dengan Menggunakan Rheostat...20
III.4 Start Otomatis Dengan Menggunakan Tahanan Mula ...21
III.5 Tingkatan Dari Tahanan Starting Medan Shunt...22
III.5.1 Tahanan Sirkit Kontrol DC ...26
III.5.2 Capasitansi ...26
III.5.3 Penetuan Waktu dengan mempergunakan Komponen RC...28
III.5.4 Rele ...31
III.6 Alat Untuk Pengasutan Motor DC Shunt (Starting)...32
III.6.1 Three Point (tiga ujung) Starting Rheostat………...32
III.6.2 Four Point (empat ujung) Starting Rheostat………….………34
III.6.3 Automatic Starter……….37
III.7 Rancangan Tahanan Mula...37
III.8 Pengasutan Motor Shunt Pada Keadaan Dinamis...37
BAB IV PENGGUNAAN TAHANAN MULA UNTUK MENGATUR STARTMOTOR ARUS SEARAH SHUNT SECARA OTOMATIS IV.1. Umum...45
IV.2 Rangkaian Percobaan ………...48
IV.3 Alat – alat yang dipergunakan ...………...48
IV.4 Prosedur Percobaan ...49
IV.5 Hasil Pengamatan...50
IV.6 Analisa Hasil Pengamatan ...52
V.1 Kesimpulan...57
V.2 Saran...58
ABSTRAK
Motor DC sangat dikenal karena penggunaanya yang sangat luas. Dengan
melakukan berbagai penggabungan lilitan medan yang literal secara shunt, seri maupun
secara terpisah, dapat dirancang suatu motor yang menampilkan kecepatan momen-kakas
yang bermacam-macam. Untuk motor arus searah yang kapasitasnyacukup besar, pada
waktu menjalankan motornya tidak dapat dihubungkan langsung dengan sumber
tegangan DC. Hal ini disebabkan tahanan jangkar relatif rendah, sehingga apabila
dihubungkan langsung dengan sumber DC akan menimbulkan arus mula besar yang
dapat mengakibatkan kerusakan pada motor serta mengganggu kestabilan operasi
peralatan lain, maka diperlukanlah penambahan tahanan mula untuk mengurangi arus
startnya.
Oleh karena itu, dalam penulisan tugas akhir ini akan dibahas tentang penggunaan
BAB I
PENDAHULUAN
I.1. Latar BelakangKebutuhan akan eneri listrik akan semakin meningkat seiring dengan
meningkatnya teknologi dan perekonomian masyarakat. Untuk itu permintaan
energi listrik tersebut harus dapat terpenuhi agar dapat menyokong program
peningkatan teknologi dan perekonomian. Akan tetapi sampai saat ini, Indonesia
masih tergolong negara pengguna teknologi peralatan listrik dan belum mampu
menciptakan peralatan listrik. Dimana peralatan listriknya masih bergantung
kepada negara indutri teknologi. Di negara – negara maju, pemakaian energi
listrik lebih besar di bandingkan dengan penggunaan energi dalam bentuk lain,
karena energi listrik ini lebih mudah di konversi ke dalam bentuk energi lain
seperti mekanik. Energi listrik merupakan kebutuhan pokok dalam industri untuk
mengoperasikan motor - motor listriknya. Dimana energi listrik itu akan di
konversikan menjadi energi mekanik berupa putaran dari rotor.
Untuk motor arus searah yang kapasitasnya cukup besar, pada waktu
menjalankan motornya tidak dapat di hubungkan langsung dengan sumber
tegangan DC. Hal ini di sebabkan tahanan jangkar relatif rendah, sehingga apabila
dihubungkan langsung dengan sumber DC akan menimbulkan arus mula besar
yang dapat mengakibatkan kerusakan pada motor serta mengganggu kestabilan
operasi peralatan lain.
Pilihan penggunaan motor arus searah pada industri modern adalah karena
kecepatan putar motor arus searah mudah diatur dalam suatu rentang kecepatan
yang lebar, di samping banyaknya metode yang dapat di gunakan. Dimana salah
satunya untuk pengaturan otomatis start motornya menggunakan tahanan mula.
Motor DC itu sendiri terbagi atas beberapa jenis, yaitu : Motor DC
penguatan terpisah, Motor DC shunt, Motor DC seri, dan Motor DC kompon. Di
tugas akhir ini akan di bahas tentang penggunaan tahanan mula pada pengaturan
1.2 Rumusan Masalah
1. Mengaplikasikan penggunaan tahanan mula untuk mengatur start motor
arus searah shunt secara otomatis.
2. Mendapatkan kesimpulan dari penambahan tahanan mula untuk
mengurangi arus startnya.
I.3 Batasan Masalah
Untuk memudahkan pembahasan dan menitik beratkan pada permasalahan
dan pembahasan tugas akhir ini, maka penulis hanya membahas mengenai :
1. Nilai tahanan mula untuk mengurangi besarnya arus start.
2. Prinsip kerja rangkaian yaitu pemutusan tahanan mula dengan bantuan
kontraktor ( Secara Otomatis ).
Adapun permasalahan yang tidak penulis bahas adalah mengenai :
1. Tidak membahas pengaturan kecepatan motor DC penguatan shunt.
2. Jenis beban tidak dibahas secara mendetail
3. Tidak membahas rugi – rugi dan effisiensi motor DC penguatan shunt.
I.4 Tujuan Penulisan
Adapun tujuan dari Penulisan ini untuk mempelajari dan
memahami penggunaan tahanan mula untuk mengatur start motor arus
searah shunt secara otomatis. Sehingga untuk motor – motor arus searah
yang kapasitasnya cukup besar, waktu menjalankannya tidak dapat
dihubungkan langsung ke sumber tegangan DC, karena tahanan jangkar
relatif rendah, sehingga apabila dihubungkan langsung dengan jala – jala
akan dapat mengakibatkan kerusakan pada motor, maka di perlukanlah
I.5 Metode penulisan :
1. Study literatur
Penulis mengumpulkan berbagai literatur untuk mendapatkan dasar-dasar
pembahasan yang jelas serta teori-teori yang berhubungan dengan tugas
akhir ini.
2. Diskusi
Penulis mendapatkan bimbingan dari dosen pembimbing serta diskusi
dengan rekan rekan mahasiswa.
3. Percobaan dan pengambilan data
Penulis membuat simulasi rangkaian percobaan sesuai dengan judul tugas
akhir ini , agar lebih mudah dalam penganalisaannya dan tampak hasilnya
I.6 Sistematika Penulisan
BAB I : PENDAHULUAN
Berisikan tentang latar belakang, batasan masalah, tujuan
penulisan, metode penulisan dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi tentang konstruksi Generator arus searah, prinsip
Generator arus searah, prinsip penyearah, teori umum motor arus
searah, prinsip motor arus searah, operasi motor arus searah,
pengaturan kecepatan motor arus searah, arus medan, tahanan
jangkar dan pengaturan tegangan terminal jangkar.
BAB III : PENGASUTAN (STARTING) MOTOR ARUS SEARAH
SHUNT
Bab ini berisi tentang teori umum pengasutan Motor DC, cara
(Starting) dengan menggunakan Rheostat, Start otomatis dengan
menggunakan tahanan mula, Start elektronik, tingkatan dari
tahanan Starting medan Shunt.Membahas alat untuk pengasutan
motor DC Shunt (Starting), three point (tiga ujung) starting
rheostat, four point (empat ujung) starting rheostat, automatic
starter, beberapa komponen yang digunakan pada rangkaian
pengaturan motor listrik.
BAB IV : PENGGUNAAN TAHANAN MULA UNTUKMENGATUR
START MOTOR ARUS SEARAH SHUNT SECARA
OTOMATIS
Bab ini membahas untuk menentukan besarnya harga tahanan
mula, rangkaian pengaturan start motor arus searah shunt, dan
membahas prinsip Kerja rangkaian
BAB V : KESIMPULAN DAN SARAN
Bab ini berisi tentang kesimpulan dan saran dari pembahasan yang
BAB II
LANDASAN TEORI
II.1 UmumSeperti telah di ketahui bahwa mesin arus searah terdiri dari dua bagian, yaitu :
− Generator arus searah
− Motor arus searah
Ditinjau dari konstruksinya, kedua mesin ini adalah sama. Perbedaan nya terletak
pada arah arus dan jenis energi yang dipergunakannya. Kalau Generator arus searah
mengkonversikan energi mekanik menjadi energi listrik, sedangkan motor arus searah
mengkonversikan energi listrik menjadi energi mekanik.
Dalam kehidupan sehari – hari motor arus searah dapat di lihat pada motor starter
mobil, pada tape recorder, pada mainan anak – anak dan sebagainya. Sedangkan pada
pabrik – pabrik, motor arus searah di jumpai pada traksi, elevator , conveyor dan lain –
lain.
Antara generator arus searah dan motor arus searah tidak ada perbedaan pada
konstruksinya, sehingga pada prinsipnya motor arus searah dapat dipakai sebagai
generator arus searah dan sebaliknya generator arus searah dapat pula dipakai sebagai
motor arus searah
Dengan sendirinya generator arus searah yang di maksud bukanlah generator arus
searah yang menggunakan penyearah ( Rectifier ) silikon / diode, tetapi dengan
penyearah mekanik ( Komutator )
II.2 Konstruksi Motor Arus Searah
Secara umum mesin arus searah memiliki konstruksi yang terbagi atas ( dua )
bagian, yaitu bagian yang diam yaitu stator dan bagian bergerak/berputar yaitu rotor
Gambar 2.1 Konstruksi Motor Arus Searah
Dari gambar 2.1 di atas konstruksi mesin arus searah terdiri dari :
1.Rangka ( Badan Motor )
Rangka motor arus searah berfungsi sebagai tempat untuk meletakkan
sebagian besar komponen mesin. Untuk itu rangka harus dirancang memiliki
kekuatan mekanis yang tinggi unutk mendukung komponen – komponen mesin.
Karena selain sebagai sarana pendukung mekanis bagi mesin, rangka juga
berfungsi sebagi tempat mengalirkan fluksi yang dihasilkan oleh kutub – kutub
medan, maka rangka dibuat dengan menggunakan bahan ferromagnetik yang
permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja
lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai
bagian dari rangkaian magnet. Untuk itu rangka harus dilaminasi untuk mengurangi
rugi – rugi besi.
2. Pole (Kutub)
Kutub – kutub medan terdiri atas inti kutub dan sepatu kutub. Inti kutub
dibuat dari laminasi pelat – pelat baja yang terisolasi satu sama lain dan direkatkan
bersama – sama kemudian dibaut pada rangka. Pada inti kutub ini dibelitkan
Sepatu kutub yaitu permukaan dari kutub yang berdekatan dengan celah
udara dibuat lebih besar dari badan ini. Sepatu kutub ini berfungsi unutk menahan
kumprana medan di tempatnya dan menghasilkan distribusi fluksi yang lebih baik
yang tersebar di seluruh jangkar dengan menggunakan permukaannya yang
melengkung.
Fungsi dari sepatu kutub adalah :
1. Menyebarkan fluksi pada celah udara
2. Sebagai pendukung mekanis bagi kumparan medan.
3.Kumparan Medan
Kumparan medan merupakan susunan konduktor terbuat dari kawat tembaga
yang berbentuk bulat ataupun persegi dan dibelitkan pada inti kutub. Kumparan
pada setiap kutub dihubungkan secara seri untuk membentuk rangkaian medan.
Rangkaian medan inilah yang berfungsi untuk menghasilkan fluksi magnet.
Rangkaian medan dapat dihubungkan secara seri ataupun paralel dengan kumparan
jangkar, juga dapat dihubungkan tersendiri langsung kepada sumber tegangan,
sesuai dengan jenis penguatan pada motor. Banyaknya belitan pada setiap kutub
tergantung hubungan kumparan medan terhadap kumparan jangkar.
4. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan
permukaan kutub - kutub medan yang menyebabkan jangkar tidak bergesekkan
dengan kutub – kutub medan. Fungsi dari celah udara ini adalah sebagai tenpat
mengalirnya fluksi yang dihasilkan oleh kutub – kutub medan.
Celah udara ini diusahakan agar sekecil mungkin. Semakin besar celah
udara, maka akan menghasilkan reluktansi yang tinggi, sedangkan celah udara yang
kecil menyebabkan reluktansi yang kecil, sehingga semakin kecil celah udara dapat
meningkatkan efisiensi motor.
Umumnya jangkar yang digunakan dalam motor arus searah adalah
berbentuk selinder dan diberi alur-alur pada permukaannya untuk tempat melilitkan
kumparan-kumparan tempat terbentuknya GGL lawan. Seperti halnya pada inti
kutub magnet, maka jangkar dibuat dari bahan berlapis-lapis tipis untuk
mengurangi panas yang terbentuk karena adanya arus liar (Edy current). Bahan
yang digunakan jangkar ini sejenis campuran baja silikon.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat
dibangkitkannya ggl induksi. Jenis – jenis konstruksi kumparan jangkar pada rotor
ada 3 macam, yaitu :
1. Kumparan jerat (lap winding)
2. Kumparan gelombang (wave winding)
3. Kumparan kaki katak (frog-leg winding)
7. Komutator
Komutator yang digunakan dalam motor arus searah pada prinsipnya
mempunyai dua bagian yaitu :
1. Komutator bar merupakan tempat terjadinya pergesekan antara komutator
dengan sikat-sikat.
2. Komutator riser merupakan bagian yang menjadi tempat hubungan komutator
dengan ujung dari lilitan jangkar.
8. Sikat
Fungsi utama dari sikat-sikat adalah untuk jembatan bagi aliran arus dari
lilitan jangkar dengan sumber tegangan. Disamping itu sikat-sikat memegang
peranan penting untuk terjadinya komutasi. Agar gesekan antara
komutatorkomutator dan sikat tidak mengakibatkan ausnya komutator, maka
bahan sikat lebih lunak dari komutator. Biasanya dibuat dari bahan arang (coal).
Motor arus searah adalah suatu mesin yang mengkonversikan energi listrik arus
searah menjadi energi mekanis, dimana outputnya menghasilkan torsi dan kecepatan.
Secara garis besar motor arus searah terdiri dari dua bagian, yaitu: Bagian stator
dan bagian rotor.
Bagian – bagian stator terdiri atas :
1. Yoke
Yoke merupakan badan motor arus searah terbuat dari besi tuang dan berguna
sebagai penyokong kutub magnet serta melindungi bagian dalam mesin.
2. Inti kutub dan sepatu kutub ( ujung laminasi )
Inti kutub terdiri dari laminasi – laminasi besi yang tebalnya 0.5 mm – 1 mm dan
mempunyai permeabilitas yang baik.Laminasi – laminasi itu di persatukan dengan
cara dikeling.Sepatu kutub gunanya untuk memperlebar fluksi magnetik sehingga
meliputi daerah dari celah – celah udara dan permukaan inti jangkar.
3. Kumparan medan
Kumparan medan bila diberi arus penguatan akan menghasilkan fluksi utama
dalam celah – celah udara antara stator dan rotor, dan lilitan fluksinya menjadi
penuh melalui besi dan stator.
4. Sikat
Sikat berfungsi untuk mengalirkan arus ke kumparan jangkar ( armature ) melalui
Bagian – bagian rotor terdiri dari :
1. Komutator
Komutator terdiri dari lamel – lamel merupakan lapisan – lapisan tembaga tipis
satu sama lain disekat oleh isolasi yang baik dan masing – masing dihubungkan
pada ujung konduktor dari kumparan jankar.Gunanya untuk mengalirkan arus
melalui sikat – sikat dari sumber tegangan.
2. Jangkar
Jangkar terdiri dari inti jangkar dan kumparan jangkar, terdiri dari laminasi –
laminasi yang mempunyai alur ( slot ) dan gigi serta berlubang untuk saluran
pendingin, kumparan jangkar disebut juga kumparan tenaga, dengan adanya
imbas arus yang mengalir menimbulkan reaksi utama.Dengan demikian timbulah
gaya kopel dan daya mesin.
II.4 Prinsip Motor Arus Searah
Apabila arus searah dialirkan melalui sikat ke kumparan jangkar dari motor arus
searah dan kumparan medan di beri penguatan, maka akan timbul gaya Lorentz pada tiap
sisi kumparan jangkar.Besarnya gaya Lorentz ini adalah berbanding lurus dengan
kecepatan fluks (B + Weber/m2), panjang sisi kumparan ( L = meter ) dan arus yang
mengalir ( I = Ampere ).
Secara matematis dapat dituliskan :
F = B x I x L (newton)
Gaya Lorentz (F) ini menimbulkan torsi ( T = Newton Meter ) yang menyababkan
T = F x R ( Newton Meter )
Dimana : R = Jari – jari rotor ( Radius Jangkar )
Torsi ini dalam medan magnet menyebabkan jangkar berputar, dengan adanya
komutator arah arus dalam kumparan jangkar yang ada di bawah kutub sepatu menuju
arah yang sama, sehingga torsi yang dihasilkan searah pula.
Jangkar berputar akan memotong medan magnet sehingga menimbulkan GGL
padanya. GGL ini berlawanan arahnya dengan arah tegangan terminal, GGL lawan ini
(Eb) besarnya adalah :
Eb = K Φ n ( Volt ) ...(2.1)
ta kons a
Z P
K tan
60 ..
. =
= mesin
Dimana :
a = Jumlah lintasan paralel melalui lilitan jangkar
P = Jumlah kutub
Z = Jumlah keseluruhan konduktor pada lilitan jangkar
n = kecepatan motor dalam rpm
Besarnya kerja yang dapat dihasilkan motor secara umum dapat dilihat dari
persamaan di bawah ini :
Ea = Eb + Ia . Ra ( Volt ) ...(2.2)
Φ − =
k R I E
n a a . a ( rpm ) ...(2.3)
Dimana :
Ea = Tegangan terminal jangkar (Volt )
Ia = Arus jangkar ( Ampere )
Eb = GGL lawan (EMF back) ( Volt )
Ra = Tahanan jangkar (Ohm)
Φ = Fluksi per kutub ( Weber ) Vt = Tegangan terminal ( Volt )
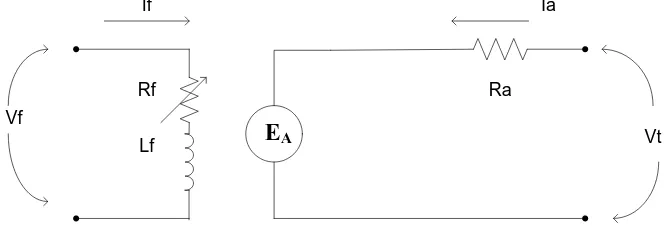
II.4.1 Motor DC Penguatan Terpisah
Motor DC penguatan terpisah adalah motor yang mendapatkan arus penguatan
medan dari luar motor.Dimana karakterisktik keluaran motor sama dengan motor shunt.
Rangkaian ekivalent dari motor DC penguatan terpisah seperti terlihat pada Gambar 2.1
di bawah ini.
EA Vt
Ra Rf
Lf If
Vf
Ia
Dari persamaan hukum tegangan Kirchoff untuk motor DC penguatan terpisah
adalah :
Vt = Ea + Ia . Ra ( Volt )
Ea = K Φ n ( Volt )
Vt = K Φ n + Ia . Ra ( Volt ) ...( 2.4 )
Torsi motor :
T= K Φ Ia ( Newton meter ) ...( 2.5 )
Φ =
k T
Ia ( Ampere ) ...( 2.6 )
Dengan mensubtitusikan persamaan (2.5) kepersamaan (2.4) di dapat :
a
t R
k T n K V
Φ + Φ
= ...( 2.7 )
Kecepatan motor adalah :
T K
R k
V
n t a
2
) ( Φ
− Φ
= (rpm)...(2.8)
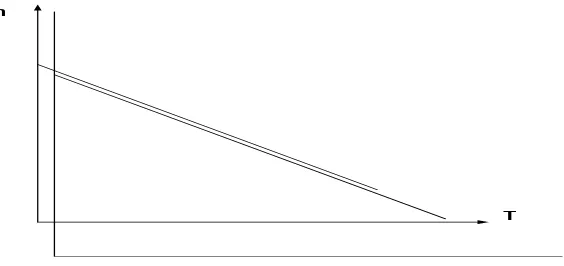
Karakterisktik torsi kecepatan motor DC penguatan terpisah seperti terlihat pada gambar
n
T
Gambar 2.3 Karakteristik torsi kecepatan motor DC penguatan terpisah
II.4.2 Motor DC Shunt
Motor DC shnt adalah motor yang mendapat arus penguatan dari dalam motor itu
sendiri, dihubungkan secara shnt.Karakteristik torsi kecepatan sama seperti pada motor
DC penguatan terpisah.Rangkaian ekivalent dari motor Dc shunt dapata dilihat pada
gambar 2.3.
Motor DC shunt memiliki kecepatan yang hampir konstan pada tegangan terminal
jangkar ( Vt ) konstan, walaupun terjadi perubahan beban, sering digunakan untuk kipas
angin, blower, pompa sentrifugal, elevator, mesin cetak, dan lain – lain.
IL
Ia
M
Ea vtRf Lf If
Persamaan tegangan hukum Kirchoff unutk motor Dc shunt adalah :
Vt = Ea – Ia . Ra
Ia = IL – If (Ampere) ...(2.9)
Dimana :
IL = Arus yang ditarik oelh beban
If = Arus medan penguatan
Torsi motor :
T= K Φ n ( Newton Meter )
a a t a
R E V
I = −
Kecepatan motor :
T K
R K
V
n t a
2
) ( Φ
− Φ
= (rpm ) ...( 2.10)
n
T
Gambar 2.5 karakteristik torsi kecepatan motor Dc shunt
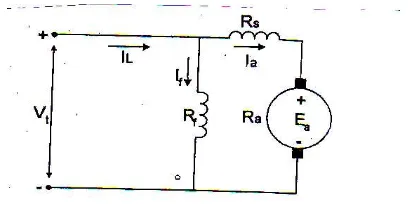
II.4.3 Motor DC Seri
Motor DC seri adalah motor yang mendapatkan arus penguatan medan dari dalam
motor itu sendiri, dimana dihubungkan secara seri.Rangkaian ekivalen dari motor DC
seperti terlihat pada Gambar 2.5
Motor DC seri dapat memberikan momen yang besar waktu start dengan arus yan
kecil.Kecepatan motor seri akan menurun pada saat beban ditambahkan dan kecepatan
akan bertambah besar pada beban rendah atau tanpa beban dan hal ini sangat berbahaya.
Untuk kecepatan tanpa bebannya biasanya tidak boleh tinggi.Dengan mengetahui sifat
ini, motor seri paling baik digunakan untuk mesin pengangkat dan beban – beban jenis
traksi.
Gambar 2.6 Rangkaian ekivalent motor DC seri
Vt = Ea + Ia ( Ra + Rs ) (volt) ...(2.11)
IL = Ia + If ( Ampere)...(2.12)
Torsi motor :
T = K Φ Ia (Newton meter)
Kecepatan motor :
Φ+ −
Φ =
K R R I K
V
n t a( a s)
Φ =
K T
Ia
T
K R R K
V
n t a s
2
) (
) (
Φ + − Φ
= (rpm) ...(2.13)
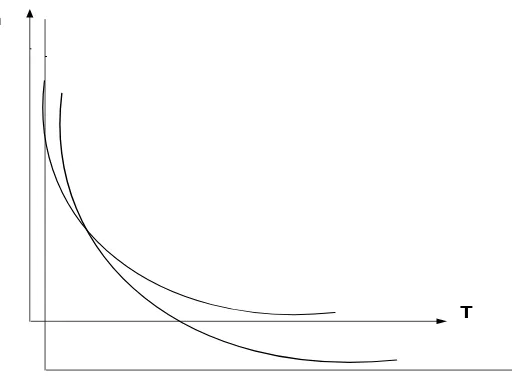
Karakteristik torsi kecepatan motor DC seri seperti terlihat pada gambar di bawah ini
n
T
II.5 Operasi Motor Arus Searah
Operasi – operasi yang penting dari motor arus searah adalah :
1. Menjalankan motor arus searah ( starting )
2. Mengatur putaran motor arus searah
Motor arus searah umumnya dijalankan dengan cara :
1. Dengan mengatur besarnya tegangan mauk atau tegangan sumber
2. Dengan mengatur besarnya tahanan mula pada rangkaian jangkar
3. Dengan menghubungkan langsung pada jala – jala
4. Dengan mengatur besarnya arus medan penguatan
Untuk motor – motor DC yang kapasitasnya cukup besar, waktu menjalankannya
tidak dapat di hubungkan langsung dengan sumber DC.Hal ini disebabkan tahanan
jangkar relative rendah.Sehingga apabla dihubungkan langsung dengan sumber DC akan
menimbulkan arus mula yang besar, dan ini dapat mengakibatkan kerusakan pada motor.
Dari rumus :
Vt = E + Ia . Ra
Dimana :
E = C n Φ Maka :
V = C n Φ + Ia. Ra
Waktu start, n = 0
Sehingga :
a t a
R V
I =
Bila kita misalkan, V = 100 Volt dan Ra = 0.1 Ohm, maka hal ini langsung akan
mengakibatkan arus mula sebesar = 1000 Ampere.
Dari rumus :
Φ − =
C R I V
n a a. a
Maka pengaturan putaran motor arus searah dapat dapat di lakukan dengan merubah
besarnya :
1. Arus penguatannya / arus medan (Φ) 2. Tahanan pada rangkaian jangkar ( Ra)
BAB III
PENGASUTAN (STARTING) MOTOR ARUS SEARAH
III.1 Teori umum Pengasutan Motor DCAda dua hal yang senantiasa menjadi persoalan pada waktu motor akan
dioperasikan (start), yaitu : pertama apakah kopel awal cukup besar untuk menarik beban
awal dan persoalan yang kedua adalah arus awal (Ist) tidak terlampau besar. Pada motor
arus searah hal yang kedua sudah langsung menjadi persoalan, sebab :
V = Ea + Ia . Ra [ Volt ]
Dimana,
Ea = C n Φ [ Volt ]
V = C n Φ + Ia . Ra [ Volt ] Pada waktu start n = 0, jadi Ea = 0
Maka :
V = Ia . Ra [ Volt ]
Ist = V
Ra [ Ampere ]
Bila kita misalkan :
V = 100 Volt dan Ra = 0.1 Ohm,
Maka hal ini langsung akan mengakibatkan arus awal sebesar 1000 Ampere. Oleh karena
menurunkan tegangan jaringan adalah sulit, maka umumnya dipakai tahanan awal dalam
seri dengan tahanan jangkar, untuk menurunkan arus awal.
Pemasukan tahanan – tahanan awal ini biasanya dilakukan secara bertahap.
Cara ini adalah yang paling sederhana dan murah, tetapi arus asut ( arus startnya)
besar. Kalau jangkar belum bergerak padahal jangkar biasanya mempunyai tahanan yang
sangat kecil maka pada saat disambung dengan jala – jala arus jangkar (Ia) besar.
Dimana,
Ist = V
Ra [ Ampere ]
Bial V = 110 Volt dan Ra = 0.05 Ohm, jika disambung langsung ( tanpa diberi tahanan
asut ) maka arus startnya adalah sebesar :
Ist = 110
Gambar 3.1 Rheostart sebagai tahanan asut pada motor shunt = 2200 Ampere
0.05
Arus ini sangat besar hingga dapat merusak kumparan jangkarnya.Kalau
motornya kecil bisa cepat berputar karena momen kelembaban rotornya kecil, begitu pula
arus asutnya. Jadi untuk motor yang kecl bisa langsung disambung dengan sumber.
Ketika motor belum berputar E = 0, karena besarnya GGL lawan (E) adalah :
E = C n Φ [ Volt ]
Pada waktu start n = 0 (belum berputar), sehingga E = 0, oleh karena itu pada waktu start
arus besar sekali.
III.3 Cara Asutan (starting) dengan Rheostart
Untuk membatasi arus shunt yang besar, pada rangkaian jangkar dipasang
Mula – mula seluruh tahanan Rheostart dipakai, arus jangkar dibatasi oleh Rst,
arus penguat magnet (Im) menjadi besar. Sesudah bergerak, GGL lawan (E) maka timbul:
E =
60 a
pn
. Z . Φ. 10-8 (Volt) Dimana :
60 a
pn
. Z . Φ. 10-8 adalah bilangan konstan sehingga : E = C . n . Φ
III.4 Start Otomatik dengan Menggunakan Tahanan Mula
Ada kalanya sebuah motor arus searah harus sering distart, sehingga dirasakan
perlu menyederhanakan pekerjaan operator agar ia cukup menekan tombol saja, dan
proses start kemudian berjalan sendiri. Gambar 3.2 memperlihatkan skema prinsip salah
satu cara untuk start otomatik, dengan mempergunakan tiga buah tahanan start R1, R2
[image:30.612.129.508.381.582.2]dan R3.
Gambar 3.2 Skema prinsip start otomatik dengan menggunakan tahanan
mula motor arus searah shunt
Dalam rangkaian seri terdapat tiga buah tahanan start R1, R2, dan R3. S adalah
Untuk start, saklar utama S harus terlebih dahulu ditutup. Bilamana saklar start S4
di tekan maka kumparan K akan dihidupkan, sehingga tertutup saklar - saklar S4a dan
S4b. Karenanya motor mendapatkan tegangan melalui tahanan – tahanan R1, R2, adn R3,
sehingga mengalir arus yang dibatasi oleh tahanan – tahanan itu.
Karena lilitan shunt mendapatkan tegangan penuh, start dilakukan dengan medan
shunt penuh, dan arus awal agak kecil karena R1, R2, dan R3. Motor mulai jalan, dan
arus awal agak kecil karena R1, R2, dan R3. Motor mulai jalan, dan arus
mulai mengalir. Pada suatu nilai tertentu I1 dari arus, kumparan TD1 akan dihidupkan,
dan menutup saklar S1, sehingga tahanan R1 dihubung singkat.
Motor M akan mendapatkan bahagian – bahagian tegangan yang lebig besar, arus
akan mendadak naik, kemudian mulai turun lagi, dan pada suatu nilai I2 kumparan TD2
akan dihidupkan, menarik saklar S2 sehingga tertutup tahanan R2, dan cerita yang sama
akan terjadi, menyebabkan motor M lagi mendapatkan tambahan tegangan.
Bilamana juga R3 telah dihubung singkat, maka motor telah mendapatkan
tegangan jaringan yang penuh. Perlu dicatat bahwa pada waktu start, lilitan shunt harus
mendapatkan tegangan jaringan penuh.Bilamana medan shunt memiliki tahanan pengatur
perlu ada penjagaan, bahwa pada saat start tahanan pengatur ini dihubung singkat.Untuk
berhenti maka ditekan saklar S5, sehingga kumparan K dimatikan, hal sama penyebab
terputusnya rangkaian arus.
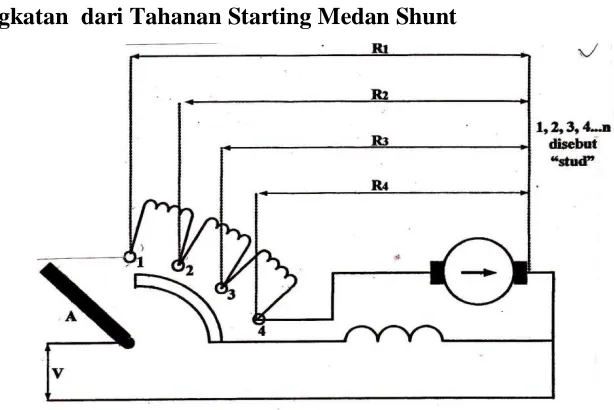
[image:31.612.145.452.485.690.2]III.5 Tingkatan dari Tahanan Starting Medan Shunt
Arus maksimum
1 1
R v
I = (Ampere) ………..(3.1)
Pada saat lengan A berada di ”stud” 1.
Pada saat lengan A berpindah dari stud 1 ke 2, maka arus akan turun menjadi I2 dan emf
yang timbul = Eb1, maka berlaku hubungan :
2 1 2 R Eb v
I = − (Ampere)……….(3.2)
Nilai n tetap, maka Eb1, tetap jadi :
2 1 1 R Eb v
I = − (Ampere)……….(3.3)
Dari persamaan (3.2) dan (3.3) :
2 1 2 1 R R I I = ……….(3.4)
Jika A berada beberapa lama pada stud 2 dan emf naik menjadi Eb2, maka berlaku :
2 2 1 R Eb v
I = − (Ampere)……….(3.5)
Demikian juga dibuat kontak pertama dengan stud n:3 maka arus :
3 2 1 R Eb v
I = − (Ampere)……….(3.6)
Dari persamaan (3.5) dan (3.6) diperoleh :
Bilamana lengan A berada lama di 3, maka emf naik menjadi Eb3 dan arus turun menjadi
I2, dimana :
3 3 2 R Eb v
I = − (Ampere)……….(3.8)
Kalau kontak masuk pada stus 4, maka arus mengalir :
Ra Eb v I 3 1 −
= (Ampere)……….(3.9)
Dari persamaan (3.9) dan (3.8) diperoleh :
a R R I I 3 2
1 = (Ampere)……….(3.10)
Dari persamaan (3.4), (3.7), dan (3.10) kita lihat bahwa :
K Ra R R R R R I I = = = = 3 3 2 2 1 2 1 ....……….(3.11) Maka :
R3 = K Ra
R2 = K R3 = K2 Ra
R1 = K R2 = K K2 Ra = K3 Ra
Dalam bentuk umum :
Misaljkan :
n = banyak stud hidup ( live stud )
(n – 1 ) = banyak bahagian tahanan depa, maka :
R1 = K a n
R . 1
1 1 = n− a
K R
R
atau
a R
R I
I 1
2 1 =
Dengan beberapa formulasi diatas akan kita terapkan pada motor yang akan
dicoba di laboratorium nanti.
Seperti telah disebutkan pada bab pendahuluan sebelumnya bahwa data – data
dari motor yang akan dicoba adalah :
Jenis : Motor arus searah penguatan bebas
Kapasitas : 2000 Watt
Tegangan : 220 Volt
Ia nominal : 9.1 Ampere
n nominal : 1500 rpm
Klas Isolasi : B
Perhitungan :
P = 2000 Watt
Vt = 220 Volt
Ia = 9.1 Ampere
Ra = 0.25 Ohm
Arus start motor diambil 1.6 kali arus nominal motor,
Ist = 1.6 . Ia
= 1.6 . 9.1
Ist = 14.56 Amp ∼ 15 Amp R1 =
R1 = 14.67 15
220
= Ohm
R1 = Kn−1 . Ra
14.67 = K4−1 . 0.25
14.67 = K3 . 0.25
K = 3 14.67/0.25
K = 3.89
R2=
K R1
R2 = 3.77 89
. 3
67 . 14
= Ohm
R3 =
K R2
R3 =
89 . 3
77 . 3
∼ 1.0 Ohm
Tahanan bahagian :
Bahagian 1 : r1 = R1 - R2 = 14.67 – 3.77 = 10.90 Ohm
2 : r2 = R2 - R1 = 3.77 – 1.00 = 2.77 Ohm
3 : r3 = R3 - Ra = 1.00 – 0.25 = 0.75 Ohm
III.5.1 Tahanan sirkit kontrol DC
Pemakaian tahanan pada sirkit kontrol DC adalah sebagai komponen tempat
pelepasan muatan ( discharge ) kapasitor C yang telah dimuati dan untuk menentukan
besarnya tahanan yang di pergunakan akan dijelaskan pada bagian III.5
III.5.2 Capasitansi ( C )
Kapasitor pada umumnya terdiri dari dua permukaan konduktor yang diparalelkan
dan dipisahkan oleh suatu medium yang disebut dengan dielektrik. Permukaan konduktor
umumnya digunakan dalam sistem tenaga dan sirkit komunikasi adalah kapasitor plat
sejajar.
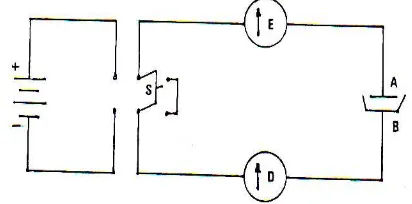
Kapasitor dapat merupakan sumber energi. Untuk lebih jelasnya perhatikan
Gambar 3.4 dibawah ini yaitu sebuah kapasitor plat sejajar AB yang dihubungkan seri
dengan dua buah galvanometer ( alat untuk mendeteksi arus listrik ) D dan E, juga saklar
S yang disusun sedemikian rupa yaitu untuk menghubungkan kapasitor tersebut dengan
sumber tegangan searah ( batere) atau untuk menghubung singkatkan terminal – terminal
[image:36.612.206.412.243.345.2]dari kapasitor tersebut.
Gambar 3.4 Kapasitor AB adalah dimuati (charge) bila saklar menutup kekiri dan
melepaskan muatan (discharge) bila saklar ditutup kekanan.
Kekuatan dari kapasitor untuk menyimpan energi listrik disebut dengan
kapasitansi dimana besar dari kapasitansi tersebut dapat diturunkan sebagai berikut :
Hukum gauss :
∫D. Cos ϕ = Q / A D = ε. E
ε. E = Q / A
E = A Q
ε ...(a)
Juga :
E = V.d ...(b)
Substitusi persamaan (b) pada (a),
V.d = A Q
. ε
d A V Q ε.
Jadi kapasitansi plat sejajar adalah :
C =
d A . ε
Dimana :
C = Capasitansi ( Farad )
Q = muatan ( coulomb )
V = tegangan antara plat ( Volt )
ε = permeabilitas bahan dielektrik ( Farad/m) d = jarak antara kedua plat ( Meter )
A = luas penampang plat ( meter2 )
Pada keadaan pelepasan muatan (discharge), energi yang tersimpan akan
dikeluarkan dan besar energi yang disalurkan sebuah kapasitor adalah sebagai berikut :
Q = C.v
dQ = C.dV
karena :
dW = V. dQ, maka :
dW = c.v.dV
atau :
w = 2 .V2 c
...(3.12)
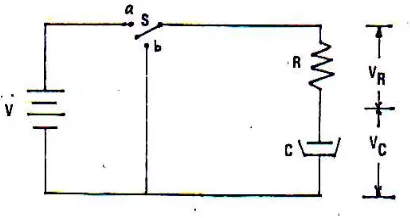
III.5.3 Penentuan waktu dengan mempergunakan komponen RC
Seperti telah dijelaskan pada bahagian III.4 bahwa salah satu sifat dari kapasitor
adalah apabila sebuah kapasitor dimuati atau dihubungkan dengan sumber arus searah
maka kapasitor tersebut akan dimuati (diisi) sampai beda potensial antara kedua pat dari
kapasitor sama dengan beda potensial sumber arus searah. Selanjutnya kaki (terminal)
kapasitor dilepaskan dari hubungan dengan tahanan R sehingga kapasitor C akan
menyalurkan energi listrik yang tersimpan tadi melalui tahanan R tersebut. Untuk lebih
Gambar 3.5 Rangkaian pengisian dan pelepasan muatan kapasitor C
Misalkan sebelum t = 0, saklar s berada pada posisi a, berarti terjadi pengisian
(charge) pada kapasitor sampai tercapainya keadaan steady state yaitu tegangan kapsitor
Vc sama dengan tegangan sumber V.
Setelah hal tersebut diatas tercapai, saklar s dipindahkan pada posisi b, ini berarti terjadi
pengosongan mauatan ( discharge) dari kapasitor C melalui tahanan R dengan arah arus
nya berlawanan dengan arah arus pengisian.
Persamaan rangkaian setelah t = 0, adalah :
Vr+ Vc = 0
R.i + 1∫i.dt =0 c
Penyelesaian secara matematis menghasilkan :
I = K. e−t /RC ...( 3.13)
Untuk menentukan konstanta K, kita atur t = 0 dari persamaan ( 3.13 ) dan substitusi
initial current i0.kapasitor discharge dengan tegangan V yang polaritasnya seperti gambar
3.4 di atas, initial current berlawanan terhadap arus tersebut, sehingga :
i0 = -R V
...( 3.14)
substitusi persamaan 3.14 pada 3.13 unutk harga t= 0
-R V
= K.e0
-R V
K = - V / R ...( 3.15)
Substitusi persamaan 3.15 pada 3.13
i = -R V
e−t /RC ...( 3.16)
pada proses discharge berarti terjadi penurunan tegangan dari kapasitor tersebut.
Persamaan tegangan kapasitor :
Vc= idt c . 1
∫
Vc=
-RC t
e R V c
/
1 −
∫ dt
Vc = V.e RC t /
− ...( 3.17)
Dimana :
RC = time constant
T = waktu discharge
V = tegangan sumber
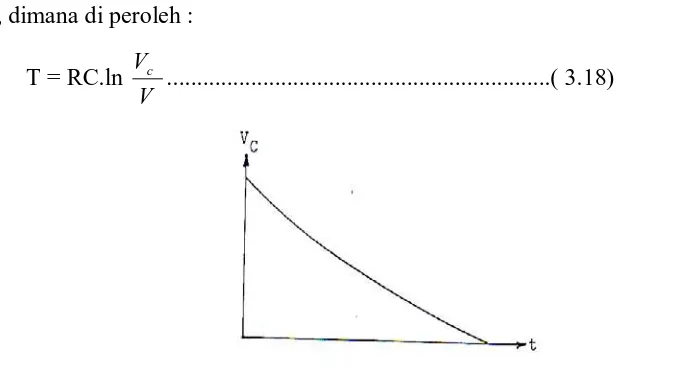
Dari persamaan 3.17, bentuk tegangan Vcsebagai fungsi dari waktu t dapat di gambarkan
seperti Gambar 3.6 berikut.
Untuk menentukan harga waktu discharge t, dapat diturunkan dari persamaan
3.18, dimana di peroleh :
T = RC.ln
[image:39.612.113.460.442.630.2]V Vc
...( 3.18)
Gambar 3.6 Grafik penurunan tegangan kapasitor sebagai fungsi dari waktu
Dari persamaan 3.18 dapat kita lihat bahwa besarnya waktu discharge dapat
dibuat bervariasi yaitu dengan merubah-ubah besar tahanan R dan kapasitor C. Dalam
percobaan yang dilakukan, variasi waktu tersebut akan dilakukan dengan membuat
variasi terhadap besaran tahanan R dan kapasitor C.
Contoh :
No Tahanan ( Ohm ) Kapasitor ( µF )
1 220.0 14100
2 220.0 16100
3 26.4 16100
4 26.4 14100
Perlu ditambahkan disini bahwa untuk menggerakkan atau memindahkan posisi
saklar dilakukan secara otomatis yaitu dengan menggunakan kontaktor yang digerakkan
oleh rele elektromagnetik.
Dengan memanfaatkan gejala transient dari sirkit RC itulah untuk menentukan
tundaan ( keterlambatan ) waktu dari rele yang di tempatkan pada sirkit kontrol DC
seperti Gambar 3.7 di bawah ini.
Gamabr 3.7 Aplikasi komponen RC untuk menentukan keterlambatan waktu
rele TD.
III.5.4 Rele
Ditinjau dari tegangan kerja dari rele, maka rele ini dapat digolongkan kedalam 2
kategori, yaitu :
2. Rele yang bekerja dengan arus bolak balik
Untuk keperluan menjalankan motor arus searah penguatan bebas dengan
pengaturan tahanan depan oleh rele keterlambatan waktu yang mempergunakan
komponen RC, maka disini dipakai kedua jenis rele tersebut, yaitu berupa control relay
dan auxilary relay.
Control relay adalah rele yang bekerja dengan sumber arus searah, dipakai pada
sirkit kontrol DC, dengan tegangan kerja = 12 volt. Dalam pemakaiannya pada percobaan
dilaboratorium (aplikasi), jenis rele kontrol yang dipakai adalah cukup rele dengan rating
arus yang kecil (+− 0.5 Ampere) seperti yang sering dipakai pada rangkaian elektronika.
Rele ini biasa juga disebut dengan rele single pole-single throw. Bentuk wiring dari
[image:41.612.206.396.597.683.2]control relay ini adalah sebagai berikut.
Gambar 3.8 Bentuk wiring dari contoh relay
Auxilary relay adalah rele yang bekerja dengan sumber aus bolak – balik, dipakai
pada sirkit kontrol AC, engan tegangan kerja = 220 volt. Jenis auxilary relay yang dipakai
adalah type : SRCa 5.-3, terdiri dari empat buah kontaktor, masing – masing 2 (dua) buah
Normally Open ( NO) dan 2 ( dua) buah Normally Close (NC). Banyak nya jenis rele
yang dipakai adalah 4 ( empat ) buah. Bentuk susunan kontaktor ( contact arrangement )
Gambar 3.9 Susunan kontaktor dari rele type SRCa 50-3
III.6 Alat Untuk Pengasutan (Starting)
Untuk pengasutan (starting) motor arus searah, alat yang sering dipergunakan
adalah :
1. Three-point (tiga ujung) starting rheostat
2. Four-point (empat ujung) starting rheostart
3. Automatic starter
III.6.1 Three-point (tiga titik) starting rheostat
Dikatakan Three-point (tiga ujung) starting rheostat karena pada terminal terdapat
tiga ujung, yaitu A (armature), F (field), dan L (line). Pada three-point dilengkapi dengan
holding coil, yang gunanya adalah melindungi motor bila ada gangguan sumber tenaga.
Bila I = 0, kemagnetan dalam holding hilang sehingga pegas menarik lengan
(engkol) dan kembali kedudukan off. Oleh karena itu, apabila tegangan sumber hidup
kembali, jangkat tidak akan mengalami kerusakan. Juga apabila penguat terputus, ini
akan berbahaya karena kalau engkol tidak kembali pada kedudukan off putaran motor
menjadi sangat cepat dan berbahaya.
Pada Three-point (tiga ujung) starting rheostat holding coil (M) dipasang seri
Gambar 3.10 Three-point starting rheostat yang di pasang pada motor shunt
Rangkaian ekivalent dari Gambar 3.10 di atas adalah :
[image:43.612.197.438.410.600.2]III.6.2 Four-point (empat titik) Starting Rheostat
Gambar 3.12 Four-point starting dipasang pada motor DC shunt
Gambar 3.13 Rangkaian ekivalent four-point starting rheostat
Pada four-point starting terdapat empat ujung yaitu : L+ (line), L- (line), F (field),
dan A (Armature). Pada four-point starting rheostat juga dilengkapi dengan holding coil
(M).
Guna holding coil adalah untuk melindungi motor bila ada gangguan sumber
tenaga. Bila I = 0, kemagnetan pada holding coil hilang sehingga pegas menarik lengan
(engkol) dan kembali ke kedudukan off. Oleh karena itu apabila tegangan sumber hidup
lagi, jangkar tidak akan mengalami kerusakan.
Juga apabila rangkaian terputus, ini akan berbahaya, karena kalau engkol tidak
kembali pada kedudukan off, putaran menjadi sangat cepat dan berbahaya. Pada
four-point starting rheostat holding coil (M) dipasang paralel terhadap jala – jala. Jika engkol
tidak pada posisi off harus jala – jala terbagi tiga (tiga) bagian :
1. Rangkaian jangkar terdiri atas Ra, Rse, Rst.
2. Rangkaian holding coil terdiri atas holding coil dan R (tahanan untuk pelindung
arus)
3. Rangkaian penguat shunt (rsh)
Dengan susunan seperti diatas perubahan arus penguat tidak akan mempengaruh
arus pada holding coil.
III.6.3 Pengasutan Otomatis (Automatic Starter)
Menstart motor arus searah selain dengan cara manual, juga banyak dipergunakan
dengan cara automatic (automatic starter). Automatic starter mempunyai kontaktor yang
digerakan secara elektromagnetik.
Kerja elektromagnetik sudah diatur sebelumnya sehingga kerja kontaktor
berurutan dengan teratur. Kontaktor – kontaktor tersebut mengatur tahanan yang
III.7.Rancangan Tahanan Mula
Prinsip dalam merancang tahanan mula dapat dijelaskan dari Gambar 3.14
dibawah. Gambar 3.14 adalah motor arus searah penguatan shunt yang telah dirangkai
[image:46.612.148.446.163.314.2]seri dengan jangkar.
Gambar 3.14 Motor Arus Searah Penguatan Shunt Dengan Tahanan Mula
Berdasarkan gambar 3.14 di atas, dimisalkan ada tahanan mula (r1, r2, r3, ....rn−1,
rn) sebanyak n tahanan yang seri dengan tahanan jangkar maka diperoleh tahanan
langkah R1 :
R1 = (r1+ r2+ r3+ ...+.rn) + Ra ...( 3.19)
Dan R2 adalah :
R2 = = (r2+ r3+ r4+ ...+.rn) + Ra ...( 3.20)
Dan begitu pula dengan R3, R4 sampai akhirnya kepada Rn+1 = Ra
Rn+1 = Ra...(3.21)
Misalkan =α
min
I Imaks
Pada motor arus searah penguatan shunt fluksi medan dianggap konstan, sehingga
pergantian tahanan secara bertahan akan menghasilkan relasi :
α = = = = = +1 3 2 2 1 min ... n n maks R R R R R R I I ...( 3.23) a n n n n R R R R R R x x R R x R R 1 1 1 1 3 2 2
1 ... = =
= + + α n R R n 1
=
α
...( 3.24) n= α ln ln 1 1 R R ...( 3.25)n adalah banyaknya kancing yang di sentuh tangkai pengasut/engkol.
Dengan mendapatkan harga R1, R2, R3, .... Rn maka akan diperoleh tahanan mula r1, r
2 dan seterusny. Besarnya tahanan langkah R1, R2, R3, .... Rn, Rn+1, adalah :
R1 =
1 1 maks I V ...( 3.26)
R2 =
α1
R
Rn= αn+1
R
...( 3.27)
Maka tahanan mula r1, r2, rn dapat diperoleh yakni :
r1 = R1 - R2
r2 = R2 - R3
rn = Rn - Rn+1 ...( 3.28)
Rangkaian motor arus searah pada keadaan sebenarnya juga terdapat induktansi
kumparan jangkar (La) dan induktansi kumparan medan (L f ) dapat dilihat pada gambar
[image:48.612.178.444.149.270.2]3.15 di bawah.
Gambar 3.15 Rangkaian Motor Arus Searah Penguatan Shunt Dengan Induktansi
Jangkar dan Induktansi Medan
Pada motor arus searah penguatan shunt fluksi medan dianggap konstan maka
persamaan dapat di tuliskan sebagai berikut :
Ea= K ωr φf = Kb ωr...( 3.29) Dimana :
Kb = K φf (Volt/(Rad/S))...( 3.30) Fluksi yang dihasilkan dari belitan medan dapat dituliskan sebagai berikut :
f
φ =
m f fI N
ℜ ...( 3.31)
Dimana : φf = fluksi perkutub (Weber)
Nf = jumlah lilitan pada belitan medan
ℜm= reluktansi dari lintasan bersama anatara belitan medan dengan belitan Jangkar.
Apabila persamaan 3.31 disubsitusi ke persamaan 3.30 maka di peroleh:
Kb = K
m f fI N
Kb = K m
f fI N
ℜ = LafIf ...( 3.33 )
L m f m f af N a Z P KN ℜ = ℜ = 2
π ...( 3.34 )
Dimana Laf adalah induktansi bersama antara belitan medan dengan belitan jangkar.
Dengan demikian persamaan 3.29 dapat kembali di tuliskan sebagai berikut :
Ea=Kbωr =LafIfωr...( 3.35 ) Pada keadaan dinamis, torsi yang dihasilkan oleh motor dapat dituliskan sebagai berikut :
T dt t d J t D t T t r r L ind ) ( ) ( ) ( )
( = + ω + ω ...( 3.36 ) Apabila nilai D (konstanta Redaman) diabaikan maka persamaan diatas dapat dituliskan
kembali sebagai berikut :
T dt t d J t T t r L ind ) ( ) ( )
( = + ω ...( 3.37 ) Tind(t)=TL(t)+J
[
sωr(n)(s)−ωr(n−1)(s)]
KbIa(s)=TL(s)+J
[
sωr(n)(s)−ωr(n−1)(s)]
...( 3.38 )Dan begitu juga halnya dengan tegangan terminal motor (Vt) dalam keadaan dinamis
dapat dituliskan kembali sebagai berikut :
V ( ) ( ) ( ) E (t)
dt t dI L R t I
t a a
a mula a
t = + + ...( 3.39 )
Dengan mengubah persamaan diatas kedalam bentuk laplace, maka :
Vt(s)=Ia(n)(s)Rmula+La
[
sIa(n)(s)−Ia(n−1)(s)]
+Ea(n)(s) V) ( ) ( ) )( ( )
(s Ia(n) S Rmula Las LaIa(n 1) s Kb r(n) s
t = + − − + ω . ...( 3.40 )
[
] [
]
2 ) 1 ( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( b t a a n rn L mula a
n r K S L R Js S L R s T s J s I L s V K s + + + − + − = − ω −
I ( )
[
( 1)]
[
( 21)]
) ( ) ( ) ( ) ( ) ( ) ( b a mula s L n r b n a a t n a K S L R J s T s J K Js s I L s V s + + − − += − ω − ...( 3.42 )
Dimana :
Ia( N)(S) = arus jangkar pada saat t = tn (Amp)
Ia(n−1)(S) = arus jangkar pada saat t = tn−1 (Amp)
) (n
r
ω (S) = kecepatan putar pada saat t = t (rad/dtk)
) 1 (n− r
ω (S) = kecepatan putar pada saat t = tn−1 (rad/dtk)
J = momen inersia (Kg.m2)
TL(S) = torsi beban (N.m)
Adapun karakteristik arus start motor arus searah penguatan shunt selama
[image:50.612.189.415.356.519.2]pengasutam dengan memperhitungkan adanya induktansi jangkar dapat dilihat pada
Gambar 3.16
Gambar 3.16 Arus start Motor Karena Adanya Induktansi Jangkar Selama
Pengasutan
Gambar 3.16 diatas dapat dijelaskan sebagai berikut. Pada saat motor pertama
kali diasut (t0 = 0) putaran dan torsi motor adalah nol dan juga La
dt dIa
= 0, sehingga
persamaan pada saat motor pertama kali diasut adalah :
Ia(S)maks =
1 ) ( R S Vt
Ketika tangkai pengasutan masih berada pada kancing pertama (selang waktu t0
1
t
→ ) mulailahtimbul torsi sehingga timbullah putaran dan GGL induksi lawan. Timbulnya GGL induksi lawan ini mengakibatkan arus jatuh menjadi minimum. Putaran
motor mulai naik selang waktu t0 , besarnya arus dan putaran motor pada saar minimum
(t = t1) adalah :
I
[
]
21 0 1 ) ( ) ( (()) ) ( ) ( b a L b a a t a K S L R Js S T K Js I L S V s + + + +
= ...(3. 44 )
[
]
2 1 1 0 1 ) ( ) )( ( ) 0 ( ) ( ) ( b a a L a a t b r K S L R Js S L R S T I L S V K S + + + − − =ω ...(3. 45 )
Adapun GGL induksi lawan dan torsi induksi yang terjadi pada saar minimum (t = t1)
adalah :
Ea1(S)=Kb ωr1(S) ...(3. 46 ) Tind1(S)=KbIa1(S) ...(3. 47 )
Pada saat tangkai pengasut berpindah ke kancing 2 (dimana tahanan pada
rangkaian jangkar adalah R2) arus yang mengalir pada jangkar kembali menjadi
maksimum pada saat t = t1 ‘ . Pergeseran waktu dari t →t1 ‘ ini disebabkan oleh adanya induktansi jangkar pada rangkaian. Adanya induktansi jangkar ini mengakibatkan arus
maksimum pada saat t = t1 ‘ menjadi lebih kecil dari pada arus maksimum sebelumnya ( t
= t0 ) dan hal ini akan terjadi terus – menerus pada saat t = t2’, t = t3’ dst, putaran dan
GGL induksi lawan akan berubah oleh karena La ≠0
dt dIa
dan J ( ) ≠0
dt t dωr
. Dengan
demikian pada saat t = t1’ , t = t2’, t = t3’ dst, nilai – nilai dari putaran, arus maksimum,
torsi, dan GGL induksi lawan yang terjadi adalah ωr1’ , Tind1’, Iamaks1’, Ea1’, dst. Adapun
jangkar adalah sangat kecil sekali. Maka dari ituarus maksimum, putaran, GGl induksi
lawan dan torsi induksi yang terjadi pada saat t = t1’ adalah :
[
] [
]
2 2 2 1 1 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ' b a a L r a a t b r K S L R Js S L R S T S J S I L S V K S + + + − + − = ωω ...(3. 48 )
I
[
]
[
2]
2 1 1 ) ( ) ( ) ( ) ( ) ( ) ( " b a L r b a a t at K S L R Js S T S J K Js S I L S V S + + − − +
= ω ...(3. 49 )
E ( ) 1''( )
'
1 S Kb r S
a = ω ...(3. 50 )
Tind'(S)=KbIa1'(S)...(3. 51 )
Selang waktu t →t2 ‘ , putaran dan GGL induksi lawan semakin bertambah sehingga mengakibatkan arus kembali jatuh menjadi minimum (t = t2). Adapun besarnya arus
minimum dan putaran motor tersebut pada saat (t = t2) adalah :
[
] [
]
2 2 2 1 1 2 ) ( ( ) ( ) ( ' ) ( ' ) ( ) ( b a a L r a a t b r K s L R Js S L R S T S J S I L S V K S + + + − + − = ωω ...(3.52 )
I
[
]
[
2]
2 1 1 2 ) ( ) ( ) ( ' ) ( ' ) ( ) ( b a L r b a a t a K S L R Js S T S J K Js S I L S V S + + − − +
= ω ...( 3.53 )
Besarnya GGL induksi lawan dan torsi yang terjadi pada saat minimum (t = t2) adalah :
Ea2(S)=Kbωr2(S)...( 3.54 ) Tind2(S)= KbIa2(S)...( 3.55 )
Setelah tangkai asut berpindah dimana tahanan pada jangkar adalah R3, arus
berkurang dari pada arus maksimum sebelumnya (t = t1 '). Maka dari itu arus maksimum,
putaran, GGL induksi lawan dan torsi induksi yang terjadi pada saat t = t2 ' adalah :
[
] [
]
2 3 3 2 2 ' 2 ) ( ( ) ( ) ( ) ( ) ( ) ( b a a L r a a t b r K s L R Js S L R S T S J S I L S V K S + + + − + − = ωω ...( 3.56 )
I
[
]
[
2]
3 2 2 2 ) ( ) ( ) ( ' ) ( ' ) ( ) ( ' b a L r b a a t a K S L R Js S T S J K Js S I L S V S + + − − +
= ω ...( 3.57 )
Ea2'(S)=Kbωr2'(S)...( 3.58 ) Tind2'(S)=KbIa2'(S)...( 3.59 )
Kemudian arus kembali menjadi minimum pada saat t = t3, arus minimium dan putaran
yang terjadi pada saat t = t3 adalah :
[
] [
]
2 3 3 2 2 3 ) ( ) ( ) ( ) ( ' ) ( ' ) ( ) ( b a a L r a a t b r K s L R Js S L R S T S J S I L S V K S + + + − + − = ωω ...( 3.60 )
I
[
]
[
2]
3 2 2 3 ) ( ) ( ) ( ' ) ( ' ) ( ) ( b a L r b a a t a K S L R Js S T S J K Js S I L S V S + + − − +
= ω ...( 3.61)
Besarnya GGL induksi lawan dan torsi yang terjadi pada saat minimum (t = t3) adalah:
Ea3(S)=Kbωr3(S)... ( 3.62 ) Tind3(S)= KbIa3(S)...( 3.63 )
Demikianlah seterusnya sampai akhirnya seluruh tahanan mula terpangkas dan pada
akhirnya motor berputar dengan kecepatan putar nominalnya. Namun apabila induktansi
jangkar motor tersebut sangat kecil sekali maka nilainya dapat diabaikan. Dengan
mengabaikan induktansi jangkar maka persamaan 3-25 dan persamaan 3-26 menjadi :
( )( ) ( )
[
( 1)( ) 2 ( )]
b mula mula L n r t b n r K JsR R S T S J S V K S + − + = ω −
ω ...( 3.64 )
Iamin( ) 1( ) b
[
r(n 1)(2) L( )]
K JsR S T S J K S JsV S + − − = ω −
Persamaan 3.57 dan 3.58 diatas berlaku dengan mengabaikan induktansi jangkar.
Dengan mengabaikan induktansi jangkar maka pergeseran waktu seperti yang telah
dijelaskan sebelumnya tidak akan terjadi. Gambar 3.17 di bawa ini memperlihatkan
bahwa besar arus maksimum yang terjadi selama pengasutan pada
saat t1, t2, t3, t4, tidak mengalami perubahan, hal ini terjadi dengan mengabaikan
[image:54.612.196.408.299.404.2]induktansi jangkar.
Gambar 3.17 Arus Start Motor Tanpa Induktansi Jangkar Selama Pengasutan
Pada Gambar 3.18 dan 3.19 memperlihatkan kecepatam putar motor dan torsi induksi
Gambar 3.18 Kecepatan Putar Motor Tanpa Induktansi Jangkar Selama Pengasutan
Gambar 3.19 Torsi Induksi Motor Tanpa Induktansi Jangkar Selama
[image:55.612.183.431.428.578.2]BAB IV
PENGGUNAAN TAHANAN MULA UNTUK MENGATUR START MOTOR ARUS SEARAH SHUNT SECARA OTOMATIS
IV.1. Umum
Gejala peralihan dari suatu motor listrik adalah perubahan dari suatu kerja stabil
kepada suatu kerja lainnya, sehingga kecepatan, momen dan arus mengalami perubahan
tertunda. Gejala peralihan dari motor listrik tersebut dapat terjadi karena perubahan
beban, pembalikan putaran dan waktu menjalankan motor ataupun karena pengereman.
Juga dapat terjadi karena adanya perubahan yang tiba – tiba pada sumber, misalnya
perubahan tegangan.
Penyelidikan gejala peralihan ini penting sebab ini akan menentukan kapasitas
motor, peralatan pengaturan, perencanaan rangkaian pengaturan dan cara mengatasi rugi
– rugi yang terjadi pada waktu pengereman dan pada saat mula pengoperasian. Yang
dapat direncanakan tanpa memperhitungkan gejala peralihan ini adalah circuit mesin –
mesin dan pesawat – pesawat yang digerakannya.
Dengan melakukan perhitungan dan penyelidikan pada gejala peralihan ini, maka
kita akan dapat menentukan parameter – parameter motor yang paling ekonomis dan pada
waktu pengoperasiannya energi yang dibutuhkan adalah rendah. Gejala peralihan pada
motor – motor listrik dilukiskan oleh proses mekanik, elekromagnetik, dan panas yang
waktunya singkat. Ketiga prose ini bekerja secara serempak dan satu sama lain saling
bergantungan.
Proses gejala peralihan ini waktunya singkat sehingga pengaruh panas tidak
mempunyai arti pada komponen – komponen motor tersebut, sebab itu kerja gejala
peralihan peralihan ini dilakukan dengan pengabaian pengaruh panas.
Tujuan dari pada kontrol adalah untuk mengatur energi listrik yang dipakai motor
sedemikian rupa sehingga sesuai dengan yang kita hendaki.
Misalnya : Mengatur putaran motor, mengatur arah putaran, mengatur arus start motor
dan lain sebagainya.
Untuk mempelajari pengaturan motor – motor listrik itu ada tiga hal pokok yang penting
1. Mesin – mesin yang menghasilkan listrik (Power Supply)
2. Motor listrik yang digunakan
3. Alat – alat pelayanan dari motor yang akan diatur
Untuk mendapatkan hasil yang baik, maka faktor diatas harus benar – benar
diketahui fungsinya. Sebagai power suplly yang digunakan adalah AC maupun DC,
penetapannya tergantung dari jenis motor dan keadaan beban yang diinginkan.
Pada gambar 4.2 dibawah ditunjukan sirkit kontrol dan cara kerja nya.
[image:57.612.129.496.296.601.2]
Gambar 4.2 Sirkit kontrol dari discharge konstant waktu RC
1. Tombol start ditekan sehingga rele M bekerja. Rele ini akan menutup kontaktor –
kontaktor M. Akan tetapi dalam posisi off atau stop, rele kontrol TD telah menerima
tap, sehingga kontaktor – kontaktor Normally Close (NC), TD1, TD2, TD3 semua
terbuka. Pada saat rele M bekerja maka kontaktor bantu NC M terbuka. Dengan
terbukanya kontaktor bantu M ini, maka energi rele TD1 hilang, tetapi tidak langsung
tiba-tiba karena adanya muatan kapasitro C1. Rele TD1 akan tetap diberi energi listrik
sampai periode discharge konstant waktu R1C1.
2. Selama periode rele M diberi energi listrik, maka motor distart dengan tahanan rotor
maksimum. Setelah suatu kelambatan waktu yang ditentukan oleh discharge konstan
waktu R1C1 maka energi rele TD1 hilang, sehingga menutup kontaktro NC TD1.
Dengan tertutupnya kontaktro NC TD1, maka rele 1A bekerja, sehingga menutup
kontaktor NO 1A. Motor berjalan dengan putaran yang lebih tinggi, karena sebahagian
tahanan depan telah dihubung singkat. Pada waktu yang sama kontaktro NC 1A juga
terbuka.
3. Dengan terbukanya kontaktor NC 1A, maka rele TD2 sekarang menerima energi
listrik melalui kapasitor C2, sampai periode discharge konstan waktu R2C2 dimana
setelah periode ini dicapai, akhirnya energi rele TD2 hilang sehingga menutup
kontaktor NO 2A. Sebahagian lagi tahanan depan dihubung singkat sehingga motor
dipercepat lagi putarannya. Pada waktu yang sama kontaktor NC 2A juga terbuka.
4. Rele TD3 sekarang menerima energi listrik melalui kapasitor C3sampai priode
discharge konstan waktu R3C3. Setelah priode ini dicapai akhirnya energi rele TD3.
Tertutupnya kontaktor NC TD3akan memberi energi listrik pada rele 3A. Akhirnya
rele 3A menutup kontaktor NO 3A, ini berarti seluruh tahanan depan telah terhubung
IV.2 Rangkaian Percobaan
[image:59.612.143.462.272.651.2]Rangkaian percobaan adalah seperti terlampir.
IV.3 Alat – alat yang dipergunakan
Motor arus searah penguatan bebas, dengan data – data sebagai berikut :
Kapasitas = 2000 Watt
Tegangan = 220 Volt
Ia nominal = 9.1 Ampere
n nominal = 1500 rpm
Fuse : 16 Ampere
3 Ampere
Rectifier : - sistem jembatan
- dengan memakai trafo center tap