Perancangan Sistem Kendali Payload Menggunakan Sensor Gyroskop Memanfaatkan Control PID
Teks penuh
Gambar



Dokumen terkait
Pengujian sistem merupakan proses pengeksekusian sistem perangkat keras dan lunak untuk menentukan apakah sistem tersebut cocok dan sesuai dengan yang diinginkan
Pengujian perangkat program dimaksudkan untuk mengetahui apakah masih terdapat kesalahan dalam pembuatan programnya atau tidak, hal ini akan mempengaruhi sistem kerja dari alat
Tujuan dari pengujian sensor PIR (passive infra red) dan alarm buzzer ini adalah untuk mengetahui apakah alat yang digunakan dalam kondisi baik atau dapat
Dalam menentukan hasil dari alat pendeteksi tanah longsor, apakah dapat berfungsi dengan baik atau tidak dilakukan dengan beberapa tahapan, yang diawali dengan melakukan
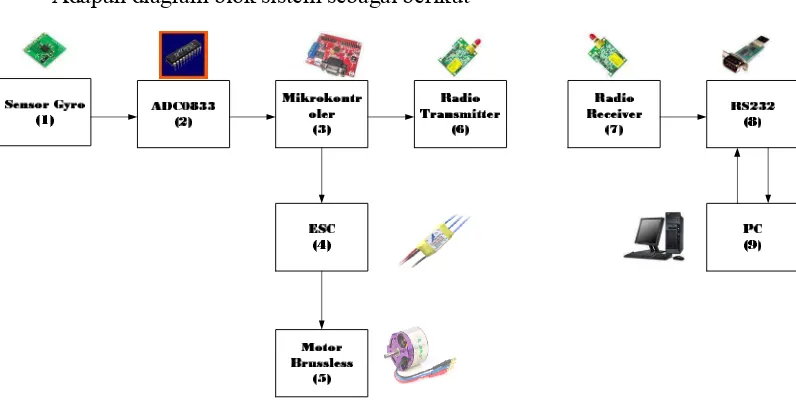
Dari blok diagram pada Gambar 1. Menunjukkan sketsa perangkat keras pendukung sistem. Pada plant alat ukur terdiri sebuah sensor Fluxgate yang berfungsi sebagai sensor
Dalam menentukan hasil dari alat pendeteksi tanah longsor, apakah dapat berfungsi dengan baik atau tidak dilakukan dengan beberapa tahapan, yang diawali dengan melakukan
Hasil dari pengujian sistem adalah sensor PIR bekerja dengan baik berkisar ±2 menit setelah alat diaktifkan dan Sensor LDR akan terus menerus mengukur nilai intensitas
Pengujian ini dilakukan untuk mengetahui kerja perangkat keras pada masing masing rangkaian dapat bekerja dengan baik antara lain pengujian rangkaian NodeMcu ESP8266
