Lampiran 1
Lampiran 2
Lampiran 3.
Kode Program Pengirim Sinyal
/**********************************************************
// Arduino Brain Library - Brain Blinker
// Description: Basic brain example, blinks an LED on pin 13 faster as your "attention" value increases.
// Adapted from the Blink without Delay example distributed with Arduino environment. // More info: https://github.com/kitschpatrol/Arduino-Brain-Library
// Author: Eric Mika, 2010 revised in 2014 #include <Brain.h>
#include <VirtualWire.h> #define buzzer A0 #define led 10
int perhatian=0; char *kirim;
// Set up the brain reader, pass it the hardware serial object you want to listen on. Brain brain(Serial);
void setup() {
Serial.begin(9600); vw_set_tx_pin(12);
pinMode(13, OUTPUT); pinMode(8, OUTPUT); pinMode(led, OUTPUT); digitalWrite(13, LOW); digitalWrite(8, LOW);
while(brain.readSignalQuality()==200) {
if (brain.update()) {
Serial.println(brain.readCSV()); Serial.print("Satu");
}
digitalWrite(led,HIGH); }
while(brain.readSignalQuality()!=200) {
if (brain.update()) {
Serial.println(brain.readCSV()); Serial.print("Satu");
}
digitalWrite(led,HIGH); }
while(brain.readSignalQuality()!=0)
{
Serial.println(brain.readCSV()); Serial.print("Dua");
}
digitalWrite(buzzer,HIGH); }
delay(1000);
digitalWrite(buzzer,LOW); }
byte counter = 0; void loop() {
if (brain.update()) {
Serial.println(brain.readCSV());
if(brain.readSignalQuality() == 26 || brain.readSignalQuality() == 51 ) {
if(counter == 0) {
kirim="1";
vw_send((uint8_t *)kirim,strlen(kirim));
vw_wait_tx(); // Wait until the whole message is gone digitalWrite(13, HIGH);
delay(2000); counter= 1; }
kirim="0";
vw_send((uint8_t *)kirim,strlen(kirim));
vw_wait_tx(); // Wait until the whole message is gone digitalWrite(13, LOW);
delay(2000); counter= 0; }
}
if(brain.readSignalQuality() == 0 && brain.readAttention() > 80) {
kirim="2";
vw_send((uint8_t *)kirim,strlen(kirim));
vw_wait_tx(); // Wait until the whole message is gone digitalWrite(13, HIGH);
delay(2000); }
Lampiran 4
Kode Program penerima Sinyal
/********************************************************** // receiver.pde
//
// Simple example of how to use VirtualWire to receive messages // Implements a simplex (one-way) receiver with an Rx-B1 module //
// See VirtualWire.h for detailed API docs
// Author: Mike McCauley ([email protected]) // Copyright (C) 2008 Mike McCauley
// $Id: receiver.pde,v 1.3 2009/03/30 00:07:24 mikem Exp $
#include <VirtualWire.h>
void setup() {
vw_set_rx_pin(8);
vw_set_ptt_inverted(true); // Required for DR3100 vw_setup(2000); // Bits per sec
vw_rx_start(); // Start the receiver PLL running
pinMode(17, OUTPUT); pinMode(19, INPUT); pinMode(20, INPUT); digitalWrite(19, HIGH); digitalWrite(20, HIGH); int sw1 = digitalRead(20); while(sw1 == 1) {
sw1 = digitalRead(20);
digitalWrite(18, HIGH); // turn the LED on (HIGH is the voltage level) digitalWrite(17, LOW);
}
digitalWrite(18, LOW); }
void loop() {
uint8_t buf[VW_MAX_MESSAGE_LEN]; uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)) // Non-blocking {
if(buf[0]=='1') {
else if(buf[0]=='0') {
digitalWrite(16, LOW); }
else if(buf[0]=='2') {
int sw2 = digitalRead(19); while(sw2 == 1)
{
sw2 = digitalRead(19);
digitalWrite(18, LOW); // turn the LED on (HIGH is the voltage level) digitalWrite(17, HIGH);
}
digitalWrite(17, LOW); delay(3000);
int sw1 = digitalRead(20); while(sw1 == 1)
{
sw1 = digitalRead(20);
digitalWrite(18, HIGH); // turn the LED on (HIGH is the voltage level) digitalWrite(17, LOW);
}
digitalWrite(18, LOW); }
Lampiran 5
Lampiran 6
a. Gambar alat penerima tampak depan
DAFTAR PUSTAKA
Andriawan Okky, Eka Putera, Irmalia Suryani Faradisa.2011.Rancang Bangun Electroencephalograph (EEG) Sebagai Perekam Dan Pendeteksi Sinyal Biolistrik Otak Yang Terintegrasi Dengan PC Berbasis Mikrokontroler ATMEGA8535. Jurnal Elektro ELTEK Vol. 2, No. 1.:115-116
Bishop, O. 2004. Dasar-Dasar Elektronika. Erlangga. Jakarta.
Budiharto, Widodo. 2010. Robotika Teori dan Impelemtasi. Yogyakarta: Andi
Campellone, JV (2006). EEG BRAIN WAVE TEST Diambil dari http://www.nlm.nih.gov/medlineplus/ency/article/003931.htm
Djamal,Esmeralda C dan Harijono A, Tjokronegoro Identifikasi dan Klasifikasi Sinyal EEG Terhadap Rangsangan Suara dengan Ekstraksi Wavelet dan Spektral Daya. 2005. PROC. ITB Sains & Tek. Vol. 37 A, No. 1.:70-72
Handinata, Oki. 2013. Pengembangan Rancang Alat Pengukur Indeks Massa Tubuh Berbasis Atmega8535 dan Databasenya Berbasis PC. [Skripsi]. Medan: Universitas Sumatera Utara.
Hede, Simon Christian.2010. Signa Detection in EEG Brainwaves. Kongens Lyngby. Denmark
Isnen, M. 2014. Perancangan Alat Ukur Tingkat Kerusakan Minyak Goreng Menggunakan Prinsi Penyerapan Medan Elektromagnetik yang Dikarakterisasi Terhadap Kadar Peroksida. [Skripsi]. Medan: Universitas Sumatera Utara.
John G.Webster 1998. Medical Instrumentation Application And Design,,John wiley & Son,
Krista, Erik Bery. S 2016. Perancangan Sistem Remote Dalam Mengontrol Beban Dengan Media Komunikasi Rf Berbasis Mikrokontroler Atmega 328p. [Skripsi]. Medan: Universitas Sumatera Utara.
San Jose. 2009. Neurosky Inc, NeuroSky‟s eSenseTM Meters and Detection of Mental State. California.
San Jose. 2010. Neurosky Inc, Mindset Communication Protocol. California.
Olga, Qiang Wang Sourina and Minh Khoa Nguyen.2008. EEG-based “Serious” Games Design for Medical Applications. Nanyang Technological
Oohashi, T., Nishina, E., Kawai, N., High Frequency Sound Above the Audible Range Affects Brain Electric Activity and Sound Perception, Presentation at the 91st Convention an Audio Engineering Society, New York (1991).
Rasinta, Septia Mega. 2015.Alat Ukur Massa Jenis Udara Berbasis Arduino. [Skripsi]. Medan: Universitas Sumatera Utara.
Rahmansyah, M. Febri. 2014. Prototipe Robot Line Follower Pengantar Makanan Berbasis Mikrokontroller ATMega32 Menggunakan Algoritma Fuzzy [Skripsi]. Medan: Universitas Sumatera Utara.
Setiawan,Afrie. 2001. Aplikasi Mikrokontroller atmega8535 & atmega 16 Menggunakan Bascom-AVR.Yogyakarta,Andi Yogyakarta.
Sibuea ,Amin Odos. 2014. Perancangan Monitoring Jarak Jauh Ketinggian Air Pada Waduk Menggunakan Sensor Ultrasonik Berbasis Pc. [Skripsi]. Medan: Universitas Sumatera Utara.
Stallings, William. 2007. Komunikasi dan Jaringan Nirkabel. Jilid 1. Edisi Kedua. Jakarta: Penerbit Erlangga.
Yutanto, Jefry.2016. Perancangan Sistem Penghitung Benih Ikan Berbasis Arduino [Skripsi]. Medan: Universitas Sumatera Utara.
[ATMEL] Atmel Corporation. 2009. 8-Bit AVR microcontroller with 32 kBytes in-System Programmable Flash, Datasheet ATmega32 [serial online]. http://www.atmel.com/Images/.
BAB III
METODE PENELITIAN
3.1 Diagram Block Cara Kerja Alat
Berikut adalah diagram alir mekanisme kerja alat.
Neurosky Mindwave
Arduino Uno
Transmiter RF 433 Mhz
Recaiver
RF 433MHz Mikrokontroller AT Mega 32A
Relay 12 Volt Driver motor L298 Lampu DC 12 volt Motor DC Buzzer Switch 1 Switch 2
Gambar 3.1 Diagram blok cara kerja alat
Berikut deskripsi fungsi setiap blok:
1. Blok Neurosky Mindwave Headset : Neurosky akan menangkap sinyal listrik
yang dikeluarkan dari kepala yang kemudian di olah dan dikeluarkan manjadi
data serial
2. Blok Arduino Uno : Menerima dan mengola keluaran data Neurosky
Mindwave Headset
3. Blok Buzzer : Sebagai penenda pemasangan Neurosky Mindwave Headset
sudah benar atau nilai poor signal quality sama dengan 0
4. Transmiter RF 433 MHz : Mengirim data yang diterima oleh Arduino Uno
dari Neurosky Mindwave Headset
5. Receiver RF 433 MHz : Menangkap frekuansi yang di keluarkan oleh
transmiter
6. Blok ATMega 32 : Membaca dan mengola hasil penerimaan data dari
7. Blok Relay : Mengeksekusi perintah dari microcontroller ( NO ke NC )
8. Blok lampu : Sebagai indikator hasil pembacaan sensor yang di eksekusi oleh
mikrokontroller dengan relay sebagai saklarnya
9. Blok Driver Motor L298N : Menghidupkan dan mengendalikan arah putaran
motor DC agar gerbang dapat terbuka dan tertutup.
10. Blok motor DC: menggerakkan pintu terbuka dan tertutup kembali
11. Switch 1 : sebagai indikator gerbang telah terbuka
12. Switch 2 :sebagai indikator gerbang telah tertutup
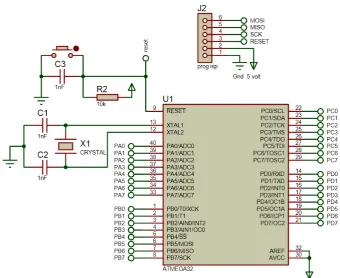
3.2 Rangkaian Mikrokontroller ATMega 32
Pada dasarnya rangkaian sistem minimum terdiri atas rangkaian standar
rekomendasi pabrik agar microcontroller dapat bekerja. Rangkaian ini terdiri atas
rangkaian osilator, standar PORT USB programer, sistem reset, dan sumber
tegangan.
Rangkaian osilator (clock) berfungsi memberikan sinyal clock untuk
mikrokontroler dengan frekuensi tertentu agar microcontroller yang digunakan
pada sistem dapat bekerja dengan baik. Rangkaian clock ini menghasilkan sinyal
high atau low dengan periode yang sama dan konstan. Rangkaian clock (osilator)
pada sistem menggunakan satu buah kristal dengan frekuensi 16 MHZ dan dua
buah kapasitor keramik dengan kapasitas 30 pF.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada microcontroller terletak
pada kaki 6, 7, 8, 9, 10 dan 11 yang akan dihubungkan ke ISP Programer.
Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka
pemograman microcontroller tidak dapat dilakukan karena microcontroller tidak
akan bisa merespon.
Sistem reset pada mikrokontroler berada pada pin 9. Sistem
microcontroller akan melakukan reset apabila pin 9 menerima satu siklus sinyal (1
dan 0). Sistem reset otomatis menggunakan kapasitro 10uF/16V dan sebuah resistor senilai 10KΩ. Dengan pemasangan kapasitor dan resistor ini, pada saat
power supply dinyalakan maka mikrokontroller akan reset secara otomatis,
Pada kaki-kaki PD0 dan PD1 dihubungkan ke Neurosky Mindwave
Headset. Catu daya yang digunakan sebesar 5 volt terhubung pada pin 10 (Vcc)
dan 11 (GND). Rangkaian sistem minimum ditunjukkan pada gambar sebagai
berikut :
Gambar 3.2 Rangkaian Sistem Minimum ATMega 32
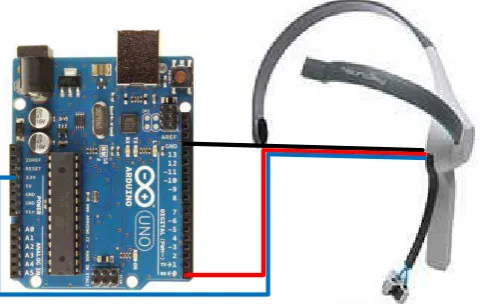
3.3 Rangkaian Neurosky Mindwave Headset
Neurosky Mindwawve Headset berfungsi membaca sinyal listrik yang kemudian
ditangkap, selanjutnya akan di kirim ke Ardino Uno. Di dalam Headset ini
terdapat Modul TGAM yang terdiri dari 4 pin untuk dapat berkomuikasi dengan
dengan mikrokontroller yaitu VCC, GND, RX dan TX. Namun pada perancangan
alat ini hanya 3 pin saja yang dipakai.
Pada sebuah arduino Uno terdapat supply output sebesar 3.3 volt, supply
ini yang akan di hubungkan ke VCC Neurosky Mindwave Headset dengan
menggunakan kabel. Karena keluaran dari Neurosky ini serupa data serial, maka
RX arduino Uno. Sementara, sumber tegangan arduino diambil dari PC
menggunakan kabel data. Berikut ini adalah rangkaian headset ke arduino uno
Gambar 3.3 Rangkaian Neurosky Mindwave Headset
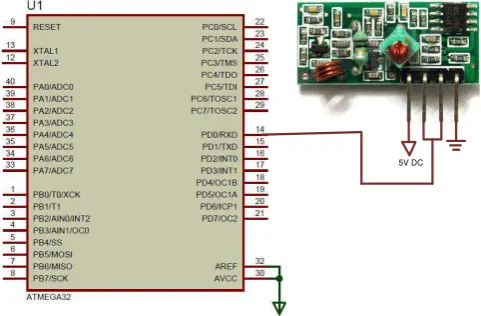
3.4 Rangkaian RF 433 MHz
Modul RF433 MHz ini digunakan untuk menerima sinyal dengan gelombang
radio elektromagnetik pada frekuensi 433 Mhz. Rf 433 MHz mengirimkan data
dari transmitter ke receiver. Berikut ini adalah rangkaian transmitter RF 433MHz
Gambar 3.4 Rangkaian Transmiter RF433
Pada bagian pengiriman (receiver) RF 433 MHz, kaki data dihubungkan
Ground. Data yang dikirim oleh mikrokontroler ATMega 328P kepada modul RF
transmitter (TX) ini berupa sinyal digital berkode ASCII. Sinyal digital berkode
ASCII ini kemudian dimodulasi menjadi gelombang radio elektromagnetis pada
frekuensi 433Mhz. Sedangkan pada bagian penerima (transmiter) RF 433 MHz,
kaki data dihubungkan ke kaki 14 mikrokontroller ATMega 32A, Vcc
dihubungkan dengan 5 volt DC dan Ground.
Data yang diterima melalui modul RF receiver (RX) ini berupa gelombang
radio elektromagnetik kemudian didemodulasi menjadi sinyal berkode ASCII
yang nantinya akan diolah oleh mikrokontroler ATMega 32A. Rangkaian
penerima data dapat dilihat pada gambar sebagai berikut:
5V DC
Gambar 3.5 Rangkaian Transmiter RF433 MHz
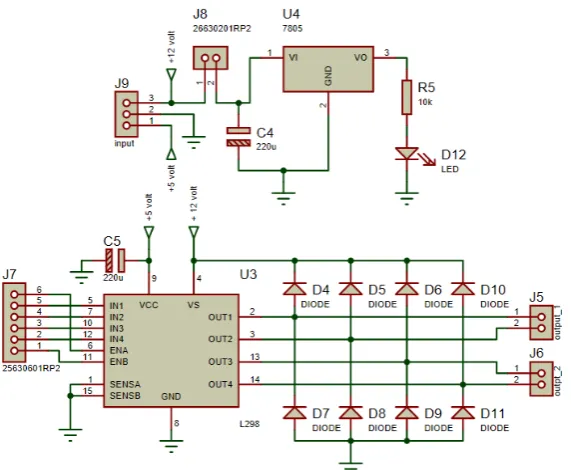
3.5 Rangkaian Modul Driver Motor DC L298
Pada dasarnya driver Motor yang menggunakan ICL298 yang memiliki
kemampuan menggerakkan motor DC sampai arus 2A dan tegangan maksimum
46 Volt DC untuk satu kanalnya.
Pada dasarnya rangkaian ini terdiri dari 8 Dioda yang akan berfungsi
memblock tegangan yang dihasilkan Motor DC agar tegangan tidak menuju ke
Sumber Vm atau output dari L298. Modul ini juga menyediakan internal 5 volt
regulator. Rangkaian modul driver l298 diperlihatkan pada gambar sebagai
Gambar 3.6 Rangkaian Modul Driver motor L298
3.6 Rangkaian Driver Relay Lampu DC
Reley merupakan alat elektronika yang prinsip kerjanya hampir serupa dengan
saklar, yang menjadi perbedaannya adalah relay digerakkan oleh arus listrik.
Relay terdiri dari tuas besi yang dikelilingi oleh lilitan kawat pada batang besi.
Pada saat tuas besi dialiri oleh arus listrik, maka akan timbul gaya magnet
sehingga menyebabkan saklar akan menutup. Begitu juga sebaliknya, jika arus
tidak mengalir maka tuas besi akan kembali ke posisi semula dan kotak saklar
kembali terbuka. Berikut ini adalh rangkaian driver relay
Pada rangkaian ini digunakan sebuah resistor 4k7Ω yang berfungsi sebagai tahanan arus , dioda IN4001 yang berfungsi untuk memisahkan tegangan 12 volt
yang masuk ke transistor dengan sinyal yang masuk dari mikrokontroler agar
tidak saling mengganggu, sebuah transistor yang berfungsi sebagai saklar agar
tegangan 12 volt mendapat ground sehingga coil pada relay mendapat arus dan
akhirnya menjadi terhubung atau relay dalam keadaan tertutup.
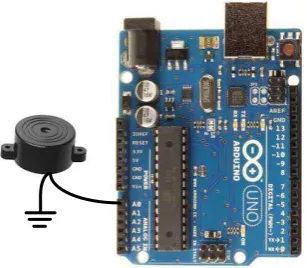
3.7 Rangkaian Buzzer
Pada rangkaian ini buzzer digunakan sebagai tanda pemasangan Neurosky Mindwave
Headset telah benar dan dapat di gunakan. Indikator yang digunakan sebagai
pemasangan Neurosky Mindwave Headset adalah nilai Poor Signal Quality yang di
hasilkan sama dengan 0. Jadi, ketika nilai Poor Signal Quality menunjukkan nilai
sama dengan nol maka buzzer akan Berhenti berbunyi. Rangkaian Buzzer di
tunjukkan pada gambar sebagai berikut.
Gambar 3.8 Skematik buzzer
Pada rangkaian ini buzer difungsikan sebagai output kaki A0 pada Arduino
Uno. Ketika output port A0 memberikan logika low (0) apabila Poor Signal
Quality menunjukkan nilai 0 yang dikirim oleh Neurosky Mindwave Headset,
dengan kata lain pemasangan Neurosky Mindwave Headset belum tepat apabila
Start
Inisialisasi Port Baca Neurosky Mindwave
Headset
Poor Signal =200
Buzzer On
Poor Signal = 0
Buzzer Off
Attantion >= 80 Delay 200ms
26 < P S <56
Kirim 1
Kirim 2 Tidak
Ya
Ya
Ya Tidak End
3.8 Diagram Alir Pemrograman
3.8.1 Diagram Alir Pemrogramam Pengirim
Start
Inisialisasi Port
Baca RF 433MHz
Data = 1
Data = 2
Relay On
Driver Motor ON
End
YA
YA Tidak
Tidak
3.8.2 Diagram Alir Pemrograman Penerima
BAB IV
PENGUJIAN DAN ANALISA
4.1 Pengujian Rangkaian Mikrokontroller ATMega 32A
Pengujian rangkaian mikrokontriller ATMega 32A dilakukan dengan
menggunakan software PROGISP (Ver 1.72) karena pemrograman menggunakan
mode ISP. Pengujian rangkaian ini dilakukan untuk mengetahui apakah
mikrokontroller dapat diprogram langsung pada papan rangkaian dan rangkaian
ini telah dikenali oleh program dwounloder
Hal yang pertama yang dilakukan adalah menghubungkan rangkaian
mikorokontroler ke PC dengan menggunakan downloader, kemudian buka
software PROGISP dan pilih chip select ATMega32A.Setelah memilih chip,
pilihRead Signature pada bagian toolbar kanan maka text box akan menampilkan
Read ID Succesfully. Jika sudah tampil pada texbox kata Read ID Succesfully
maka mikrokontroler siap digunakan untuk ditanamkam program
4.2 Pengujian Neurosky Mindwave Headset
Pengujian neurosky mindwave headset menggunakan arduino uno dan serial
monitor yang ada pada aplikasi arduino untuk melihat hasil pembacaan.
Pengujian ini dilakukan untuk mengetahui neurosky mindwave headset dapat
membaca dengan baik sinyal yang dikeluarkan oleh otak.
Langkah pertaman yang dilakuakan adalah memasukkan program ke
arduino, program yang diberikan adalah sebagai berikut
#include <Brain.h>
void setup() {
Serial.begin(9600);
}
void loop() {
if (brain.update()) {
Serial.println(brain.readErrors());
Serial.println(brain.readCSV());
}
}
Setelah program dimasukkan, langkah selanjutnya oleskan gel elektrode pada dahi
dan telinga sebelah kiri kemudian dipasang neurosky mindwave headset dikepala
sesuai pada gambar di bawah ini
Setalah itu, dipastikan kembali arduino sudah terhubung dengan Headset dan PC
lalu buka aplikasi arduino kemudian diatur board dengan cara pilih menu tools
kemudian pilih boards dan pilih arduino uno. Setelah board diatur, selanjutnya
menampilkan data yang dibaca oleh arduino. Langkah yang dilakukan adalah pilih
menu tools, kemudian pilih serial monitor maka tampilan serial monitor akan
muncul.
Jika hasil pembacaan poor singnal quality menunjukkan nilai 0 maka
posisi neurosky mindwave headset pada kepala sudah sesuai (tidak ada noise
terditeksi). Seperti yang terlihat pada gambar dibawah ini.
(a) (b)
Gambar 4.3(a) Headset belum terpasang dengan benar, (b) Headset sedah
terpasang dengan benar
4.3 Pengujian Nilai eSense Attantion Pada Keaadan Biasa (Netral)
Data eSense Attantion menyatakan konsentrasi pikiran pengguna headset yang
berhubungan dengan konsentrasi pikiran. Pada pengujian ini responden di minta
untuk memasang headset di kepala dengan benar dan melakukan keadaan seperti
biasa (netral). Pengujian ini dilakukan untuk mendapatkan data attantion pada
keadaan netral, dimana data ini akan dijadikan acuan untuk tidak mengendalikan
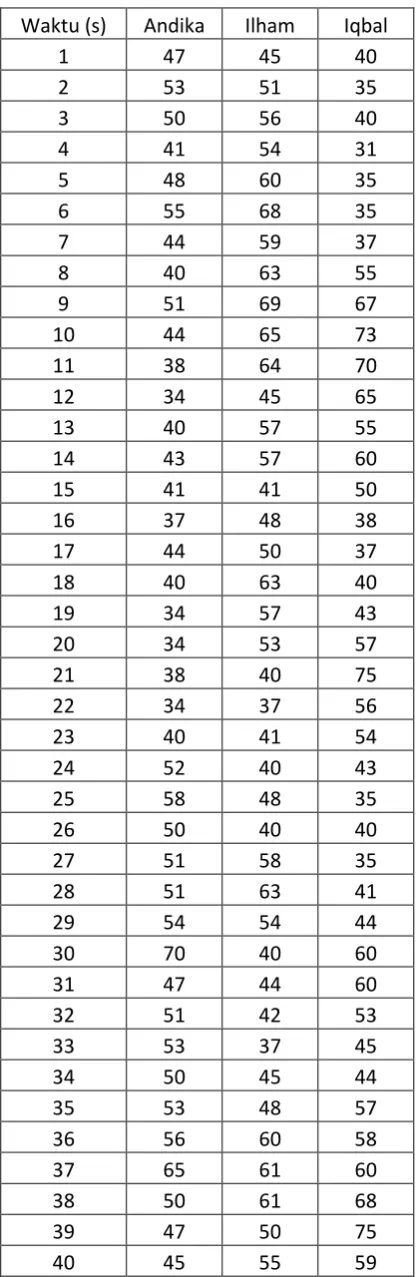
Tabel 4.1 Nilai attantion pada keadaan netral
Waktu (s) Andika Ilham Iqbal
1 47 45 40
2 53 51 35
3 50 56 40
4 41 54 31
5 48 60 35
6 55 68 35
7 44 59 37
8 40 63 55
9 51 69 67
10 44 65 73
11 38 64 70
12 34 45 65
13 40 57 55
14 43 57 60
15 41 41 50
16 37 48 38
17 44 50 37
18 40 63 40
19 34 57 43
20 34 53 57
21 38 40 75
22 34 37 56
23 40 41 54
24 52 40 43
25 58 48 35
26 50 40 40
27 51 58 35
28 51 63 41
29 54 54 44
30 70 40 60
31 47 44 60
32 51 42 53
33 53 37 45
34 50 45 44
35 53 48 57
36 56 60 58
37 65 61 60
38 50 61 68
39 47 50 75
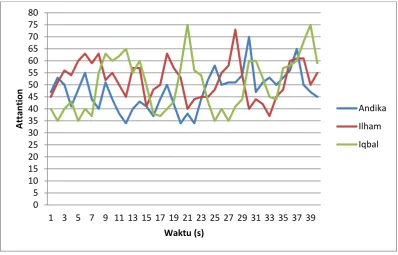
Dari hasil yang diperoleh, nilai tertinggi berada pada 76, sementara nilai terandah
pada 31 dan dominan pada nilai 40-60. Nilai ini sesuai dengan ThinkGear data
values yang dikeluarkan oleh Neurosky. Dari hasil ini, maka nilai attantion 31-76
tidak akan digunakan mengendalikan lampu dan gerbang untuk menghindari
gerbang terbuka dan tertutup ketika tidak kontrol menggunakan Headset. Berikut
ini adalah grafik keadaan netral pada 3 responden
Gambar 4.4 Nilai attantion pada keadaan netral
4.4 Pengujian Keluaran Esense Attantion Untuk Menggerakkan Gerbang Data eSense attantion menyatakan mental states pengguna headset yang
berhubungan dengan konsentrasi pikiran. Pada pengujian ini, cara yang
digunakan untuk meningkatkan nilai data ini yaitu dengan meminta responden
untuk melihat dan memperhatikan sesuatu yang bergerak (konsentrasi). Hal ini
dilakuakan karena pada umumnya manuusia akan berkonsentrasi ketika melihat
sesuatu yang bergerak. Berikut adalah hasil data yang diperoleh 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
Table 4.2 Nilai attantion pada saat fokus
Waktu (s) Andika Ilham Iqbal Kiki Madan
1 47 57 60 64 43
2 53 57 53 69 38
3 50 63 51 56 47
4 41 68 40 37 63
5 35 68 47 40 63
6 60 70 48 40 63
7 60 70 59 40 68
8 63 55 66 38 68
9 54 60 70 44 68
10 51 74 60 55 53
11 45 71 78 55 68
12 57 80 74 63 70
13 60 76 54 57 68
14 63 73 63 55 76
15 67 68 63 57 74
16 70 70 75 50 59
17 76 76 70 66 65
18 68 73 66 73 73
19 75 80 72 66 76
20 72 81 65 68 80
21 65 78 74 60 76
22 70 75 74 57 73
23 62 68 80 60 68
24 70 60 81 73 75
25 80 72 75 73 79
26 76 68 65 65 81
27 70 76 55 73 76
28 67 80 60 78 70
29 80 74 66 80 62
30 74 75 64 80 71
31 70 78 71 74 78
32 69 84 73 70 80
33 60 85 68 65 81
34 58 80 70 73 82
35 65 82 75 68 78
36 71 75 80 74 73
37 76 70 81 76 70
38 79 72 78 80 68
39 81 65 73 78 76
Dari hasil yang diperoleh data attantion tertinggi terbaca pada nilai 85 dan
terendah 34, sementaradata dominan berada pada nilai 60-80. Jika kita lihat, nilai
attantion mulai naik pada waktu 10 detik pertama. Hal ini terjadi karena
responden mulai aktif untuk berkonsentrasi. Hingga pada menit ke 40 kelima
responden menunjukkan nilai attantion tertinggi diatas 80 dengan waktu yang
berbeda-beda. Ini bisa saja terjadi karana setiap orang memiliki kemampuan dan
lama waktu untuk dapat berkonsentrasi yang berbeda selain itu keadaan fisik dan
beban pikiran juga dapat menjadi faktornya
Dari hasil ini, nilai eSense attantion yang akan digunakan sebagai
indikator untuk menggerakkan gerbang adalah >80. Nilai ini sengaja diturunkan
dari nilai tertinggi untuk mengantisipasi bila ada responden yang ingin
mengendalikan namun memiliki kesulitan dalam berkonsentrasi
Dari tabel diatas, kita dapat melihat perbandingan data yang dihasilkan
dari beberapa responden dalam betuk grafik. Berikut ini adalah hasil pembacaan
[image:30.595.112.514.393.633.2]dalam bentuk grafik pada 5 responden
Gambar 4.5 Grafik Nilai Attantion pada keadaan fokus 30 35 40 45 50 55 60 65 70 75 80 85 90
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
4.5 Pengujian Keluaran Poor Signal Quality untuk Pengendali Lampu Pada pengujian ini responden diminta untuk mengangkat alis sebanyak 1 kali.
Dari 5 responden yang diminta untuk mengangkat alis nilai poor signal quality
[image:31.595.216.427.202.351.2]menunjukkan nilai pada tabel sebagai berikut :
Tabel 4.3 Nilai Poor Signal Quality pada saat menganggkat alis
Responden Poor Signal Quality
1 26
2 26
3 51
4 26
5 26
6 51
Dari data diatas, diperoleh nilai poor signal quality pada saat mengangkat alis 26
dan 51. Nilai ini berbeda karena responden yang terlalu kuat mengangkat alis akan
memberikan nilai 51 dan jika tidak terlalu kuat maka nilai yang muncul 26. Dari
hasil ini maka nilai poor signal quality pada range 26 - 51 digunakan sebagai
indikator untuk mengendalikan lampu.
4.6 Pengujian RF 433 MHz
Pengujian terhadap RF 433 MHz ini dilakukan dengan melakukan pengiriman
data dari transmiter ke receiver, kemudian data yang dikirim akan dibandingkan
dengan data yang diterima. Cara pengujian yang lain dengan menguji kemampuan
daya pancar RF 433 MHz tersebut dengan memberikan variasi jarak antara
transmiter dengan receiver. Bagan pengiriman data RF 433 MHz
RF 433 MHz
Transmiter
RF 433 MHz
Receiver
[image:31.595.223.417.642.692.2]Untuk pengiriman dilakukan dengan menghubungkan kaki data pada
transmiter RF 433 MHz ke kaki 12 arduino uno, kemudian kita masukkan
program, program yang dimasukkan adalah sebagai berikut
#include <VirtualWire.h>
const int led_pin = 11;
const int transmit_pin = 10;
char *kirim;
void setup()
{
// Initialise the IO and ISR
vw_set_tx_pin(transmit_pin);
vw_set_ptt_inverted(true);
vw_setup(2000);
pinMode(led_pin, OUTPUT);
}
byte count = 1;
void loop()
{
kirim = "1";
digitalWrite(led_pin, HIGH);
vw_send((uint8_t *)kirim, strlen(kirim));
vw_wait_tx();
digitalWrite(led_pin, LOW);
delay(1000);
kirim = "0";
digitalWrite(led_pin, HIGH);
vw_send((uint8_t *)kirim, strlen(kirim));
vw_wait_tx();
digitalWrite(led_pin, LOW);
delay(1000);
Untuk penerimaan dilakukan dengan menghubungkan kaki data pada
receiver RF 433 MHz kekaki 14 mikrokontroller dan kaki 22 dihubungkan
kerelay yang sudah terhubung dengan lampu DC sebagai indikator keberhasilan
pengiriman, kemudian kita masukkan program ke mirokontroler melalui ISP
Downloader, program yang dimasukkan adalah sebagai berikut
#include <VirtualWire.h>
void setup()
{
vw_set_rx_pin(8);
vw_set_ptt_inverted(true); vw_setup(2000);
vw_rx_start();
pinMode(16, OUTPUT);
}
void loop()
{
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)) {
if(buf[0]=='1')
{
digitalWrite(16, HIGH);
}
else
{
digitalWrite(16, LOW);
}
}
}
Jika relay bergerak dari NO ke NC yang membuat lampu hidup pada
sistem minimum yang terpasang receiver RF 433 MHz, maka data yang di
tidak hidup maka data tidak dapat diterima oleh receiver RF 433 MHz. Dari
hasil pengamatan di dapatkan jarak dan kondosi lampu dc pada tabel di
[image:34.595.212.478.162.404.2]bawah ini.
Tabel 4.4 Pengujian RF 433 MHz tanpa halangan
Jarak (m) Data Keterangan
2 Terkirim Data baik
4 Terkirim Data baik
6 Terkirim Data baik
8 Terkirim Data baik
10 Terkirim Data baik
11 Terkirim Data baik
12 Terkirim Data baik
13 Terkirim Data baik
14 Terkirim Data baik
15 Terkirim Data baik
4.7 Pengujian Driver Relay
Pengujian driver relay dilakukan dengan cara memberikan suplay tegangan +5
volt pada resistor 4k7 ohm yang sejalur transistor C945 yang berfungsi sebagai
saklar untuk mengaktifkan relay. Jika relay bekerja dengan baik (kontak relay
tertutup) saat resistor diberi tegangan sebesar 5 volt dan sebaliknya jika relay
tidak bekerja (kontak relay terbuka) maka pada saat resistor tidak di beri tegangan
+5 volt relay tidak bekerja ( kotak relay terbuka) maka rangkaian relay berfungsi
dengan baik.
Secara teori ketika tegangan sebesar 5 volt masuk melalui resistor dan
menuju transistor maka akan terjadi bias maju pada transistor sehingga kaki
colector dan emitter pada transistor akan terhubung. Ketika tegangan 12 volt
diberikan ke relay maka kontak relay akan tertutup (terhubung) dan akan
4.8 Pengujian Driver Motor DC
Driver motor L298 digunakan sebagai pemicu dari arah pergerakan motor dc.
Pada L298 memiliki 2 buah pin enable, 4 buah pin input, dan 4 buah pin output
yang mana memungkinkan bagi kita untuk mengontrol 2 buah motor dc, namun
pada pengujian rangkaian driver kali ini hanya diuji 1 buah motor dc jadi pin yang
dipakai PIN ENA kaki 22, IN1 kaki 24, IN2 kaki 23 dan out put 1. Tegangan
inputan pada driver motor digunakan 12 volt.
Pengujian dilakukan dengan cara memberi inputan berupa logika “1” dan “0” pada masing-masing pin inputan 1 dan 2 secara bergantian kemudian melihat perubahan pada pergerakan motor DC yang terlebih dahulu sudah disambungkan
pada pin-pin output dari driver. Berikut adalah tabel hasil pengujian rangkaian
[image:35.595.152.470.371.590.2]driver motor L298 dengan memfariasikan nilai Enable A, Input 1 dan Input 2:
Tabel 4.5 Hasil Pengujian Driver motor L298
PIN L298
Kondisi Motor
Enable A Input 1 Input 2
0 0 0 Diam
0 0 1 Diam
0 1 0 Diam
0 1 1 Diam
1 1 0 Putar kanan
1 0 1 Putar kiri
1 0 0 Diam
1 1 1 Diam
4.9 Pengujian Buzzer
Pengujian pada rangkaian ini berfungsi untuk mengetahui apakah buzzer sudah
dapat bekerja dengan baik. Pengujian pada buzzer dilakukan dengan cara
memasukkan program ke mikrokontroler melalui downloader. Berikut listing
#define buzzer 15
void setup()
void loop() {
analogWrite(buzzer, 10);
delay(1000);
analogWrite(buzzer, 0);
delay(1000);
}
4.10 Pengujian Rangkaian Secara Keseluruhan
Pengujian sistem secara keseluruhan ini dilakukan dengan menggabungkan semua
peralatan dalam sebuah sistem yang terintegrasi. Tujuannya untuk mengetahui
bahwa rangkaian yang dirancang telah bekerja sesuai yang diharapkan.
Dari pengujian sebelumnya, di dapat perbedaan nilai attantion pada saat
keadaan netral dan pada saat sedang berkonsentrasi. Nilai attantion pada saat
berkonsentrasi dapat melebihi 80 sedangkan nilai attantion pada keadaan netral
tidak dapat melebihi 80. Sementara ketika responden mengangkat alis nilai poor
signal quality menunjukkan nilai antara 26-51, Sesuai dengan pengujian ini, maka
digunakan nilai Attanion di atas 80 dan nilai poor signal quality 26-51 untuk
menggendalikan gerbang dan lampu.
Untuk pengujian alat ini, dioleskan gel elektroda pada dahi dan telinga
sebelah kiri kemudian dipasang sensor neurosky mindwave headset pada kepala
lalu kemudian menghidupkan sistem. Setelah headset sudah terpasang dengan
benar dan dalam posisi hidup yang ditandai dengan buzzer yang tidak berbunyi,
responden diminta untuk menggangkat alis sebanyak satu kali untuk
menghidupkan lampu dan mengangkat alis satu kali lagi untuk menghidupkan
lampu, kemudian responden diminta kembali untuk fokus dengan cara melihat
gambar yang bergerak yang membuat dirinya menjadi fokus untuk membuat
gerbang terbuka selama 200 ms lalu tertutup dengan sendirinya.
Responden di beri waktu satu menit untuk satu perintah sesuai dengan
mengendalikan lampu dan gerbang ketika menggunakan headset. Berikut ini
[image:37.595.192.444.158.339.2]adalah hasil pengujian pada 5 responden:
Tabel 4.5 Hasil Pengujian secara keseluruhan
Nama
Perintah
Hidup
lampu
Mati
lampu
Gerak
Gerbang
Madan Ya Ya Ya
Andika Ya Ya Ya
Ilham Ya Ya Ya
Kiki Ya Ya Ya
Iqbal Ya Ya Ya
Dari hasil pengujian 5 responde berhasil menghidupkan – mematikan lampu dan
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian ini maka dapat disimpulkan:
1. Dari hasil yang diperoleh sensor Neurosky Mindwave Headset sudah dapat
dibaca nilai sensornya dengan menggunakan arduino uno yang terdiri dari 10
paket data
2. Dari hasil yang diperoleh, untuk meningkatkan nilai esense attantion dapat
dilakuakn dengan cara membuat pikiran mejadi fokus dan untuk membuat
nilao poor signal quality 26-51 dilakukan dengan cara mengangkat alis
3. Dari hasil yang diperoleh digunakan keluaran nilai Poor Signal Quality anrata
26-51 untuk menggendalikan lampu dan keluaran nilai Attantion lebih besar
dari 80 untuk mengendalikan gerbang otomatis.
5.2 Saran
Beberapa hal yang dapat disarankan dari pelaksanna tugas akhir ini adalah:
1. Untuk pemasangan sensor pada responden, diharapkan responden tidak
berkeringat dan dak lagi memiliki beban pikiran dan mental karena dapat
mempengaruhi hasil pembacaan sensor
2. Untuk perancangan sistem ini lebih lanjut hendaknya digunakan sensor yang
lebih baik untuk mendapatkan hasil yang lebih baik (Neurosky Mindwave
Mobile)
3. Untuk perancangan sistem lebih lanjut hendaknya tidak hanya mengunakan
BAB II
TINJAUAN PUSTAKA
2.1 Otak
Otak merupakan alat untuk memproses data tentang lingkungan internal dan
eksternal tubuh yang diterima reseptor pada alat indera (seperti mata, telinga,
kulit, dan lain-lain). Data tersebut dikirimkan oleh urat saraf yang dikenal dengan
system saraf keseluruhan. Sistem saraf ini memungkinkan seluruh urat saraf
mengubah rangsangan dalam bentuk implus listrik.
2.2 Gelombang Yang Dihasilkan Otak
Berikut adalah jenis jenis sinyal biolistrik otak berdasarkan frekuensi:
Gambar 2.1 Gelombang Alfa, 8-13 Hz
Gambar 2.2 Gelombang Beta, 14-25 Hz.
Gambar 2.3 Gelombang Teta, 4-7 Hz
Gambar 2.4 Gelombang Delta, < 4 Hz
Sifat gelombang ini sangat tergantung pada besarnya aktivitas di korteks serebri
dan gelombang otak jelas mengalami perubahan pada keadaan siaga, tidur dan
2.3 Electroencephalogram (EEG)
Elektroencephalogram adalah suatu alat yang mempelajari gambar dari rekaman
aktifitas listrik di otak, termasuk teknik perekaman EEG dan interpretasinya.
Neuron-neuron di korteks otak mengeluarkan gelombang-gelombang listrik, yang
kemudian dialirkan ke mesin EEG untuk diamplifikasi sehingga terekamlah
elektroenchapohologram yang ukurannya cukup untuk dapat ditangkap oleh mata
pembaca EEG sebagai gelombang alfa, beta, theta dan gama (Campellone, 2006).
EEG bekerja dengan menangkap frekuensi sinyal-sinyal listrik yang
dibangkitkan oleh otak akibat adanya aktivitas mental subjek. Dalam analisis
untuk tujuan klasifikasi sinyal EEG.
Sinyal EEG pada seseorang, umumnya terdiri dari komponen-komponen
gelombang yang dibedakan berdasarkan daerah frekuensinya, yaitu gelombang
alfa (8 – 13 Hz), amat sering muncul dalam keadaan sadar, mata tertutup dan kondisi rileks; gelombang beta (14 – 25 Hz), amat sering muncul manakala seseorang dalam keadaan berfikir; gelombang teta (4 – 7 Hz), umumnya terjadi pada seseorang yang sedang tidur ringan, mengantuk atau stres emosional;
gelombang delta (0.5 – 3 Hz), amat sering hadir pada seseorang yang pada keadaan tidur nyenyak. Oleh karena itu, representasi sinyal EEG ke dalam domain
frekuensi banyak dilakukan dalam penelitian yang berhubungan dengan analisis
sinyal EEG (Oohashi. T,1991).
Untuk merekam sinyal biolistrik otak ini ada 2 metode yang digunakan,
yaitu metode bipolar dan unipolar.
1. Metode bipolar adalah metode sadapan sinyal dengan mengambil selisih
tegangan antara dua titik pada bagian frontal dan occipital, sehingga selisih
potensial dari kedua tempat dapat tercatat.
2. Metode unipolar adalah metode dimana satu titik dijadikan sebagai titik
acuan,biasanya pada daun telinga,sedangkan yang lainnya diletakkan pada
titik yang akan diperiksa pada sisi kepala yang sama
2.4 Neurosky Mindwave Headset
Neurosky merupakan perusahaan yang berdiri sejak 2004 di Silicon Valley,
California, Amerika Serikat. Perusahaan ini berfokus pada tujuan utamanya yaitu
memanfatkan teknologi Brain Computing untuk dipasarkan pada konsumen
secara luas. Neurosky mengadaptasi teknologi EEG dan mengembangkannya
untuk dapat digunakan dalam beberapa bidang yang memenuhi permintaan
kormersial.
Terobosan terbesar Neurosky adalah ketika mereka berhasil
mengembangkan perangkat EEG dengan harga yang cukup murah. Perangkat
tersebut meliputi : sensor kering yang berfungsi menangkap input sinyak dan
gelombang yang dihasilkan oleh otak, perangkat lunak dan perangkat keras bult it
yang mampu mengurangi dan memfilter setiap elektrikal noise, serta think Gear
Chip yang berfungsi sebagai sirkuit pemrosesan sinyal dan penghasil output.
Seluruh perangkat tersebut dapat ditanamkan pada perngkat sederhana serupa
headset
Neurosky Mindwave Headset adalah sensor pengukur gelombang pikiran
buatan perusahaan Neurosky yang menghasilkan pengukuran berupa angka-angka
acak yang menyimbolkan frekuensi gelombang otak yang diterima
[image:41.595.184.453.482.637.2](Karvinan, Tero dan Kimmo Karvinan, 2011)
Gambar 2.5 Neurosky Mindwave Headset
Neurosky Mindwave Headset ini terdiri beberapa bagian penting yang
dapat mempengaruhi hasil pembacaan yaitu klip pada telinga (ear clip), sensor
ujung (sensor arm), dan lengan sensor. Referensi dan ground elektroda headset
berada pada klip telinga (ear clip) dan sensor elektroda yang digunakan untuk
membaca gelombang otak berada pada pengait depan (sensor arm) yang
bertumpu pada dahi di atas mata.
2.4.1 Modul TGAM
Bagian utama dari neurosky mindwave headset ini adalah Modul TGAM. Modul
TGAM adalah modul sensor gelombang otak produksi ASIC neurosky yang
dirancang untuk aplikasi pasar massal. Modul TGAM berisi TGAT, chip yang
berevolusi industri, dengan mattel mindflex yang bernama TIME Magazine.
Berikut ini gambar TGAM neurosky sebagai berikut:
Gambar 2.6. Modul TGAM
Berikut ini adalah konfigurasi dari pin modul TGAM
Header P1 (Electrode)
Pin1: EEG Electrode "EEG"
Pin2: EEG Shield
Pin3: Ground Electrode
Pin4: Reference Shield
Pin5: Reference Electrode "REF"
Header P4 (Power)
Pin1: VCC "+"
Pin2: GND "-"
Header P3 (UART/Serial)
Pin1: GND "-"
Pin3: RXD "R"
Pin4: TXD "T”
[image:43.595.142.486.165.400.2]Berikut ini spesifikasi dari modul TGAM
Tabel 2.1 Spesifikasi modul TGAM
Sumber Neurosky Inc. 2009
Output dari Modul TGAM ini berupa data serial. Modul ini dapat
membedakan sinyal delta, theta, alpha rendah, alpha tinggi, beta rendah, beta
tinggi dan gelombang gamma. Selain itu modul ini dapat membedakan eSense
meter berupa perhatian (attantion), meditasi (meditation) dan poor signal quality
sebagai penanda kualitas data.
Poor Signal Quality menjelaskan sinyal kurang baik yang diukur oleh
Headset ( ThinkGear) yang berkisar pada nilai 1-200. Pada saat nilai poor signal
quality menunjukkan nilai bukan nol menandakan adanya noise yang terdeteksi,
semakin tinggi nilai yang di tunjukkan maka semakin besar pula noise.
Sementara, nilai 200 memiliki arti khusus, bahwa sensor tidak menyentuh kulit
kepala. Nilai poor signal quality dapat digunakan untuk beberapa aplikasi yang
sensitif seperti mengedipkan mata. Sinyal yang kurang baik dapat di sebabkan
oleh beberapa hal:
Kontak yang buruk ke sensor atau referensi untuk kulit seseorang (terkena rambut, atau headset yang tidak benar di kepala seseorang, atau headset tidak
benar ditempatkan di kepala).
Gerak berlebihan pemakai (yaitu bergerak kepala atau badan berlebihan). Berlebihan lingkungan elektrostatik (beberapa lingkungan memiliki sinyal
listrik yang kuat atau penumpukan listrik statis di orang yang memakai
sensor).
Esense merupakan suatu algoritma yang dikeluarkan perusahaan NeuroSky
untuk mencirikan keadaan mental seseorang. Untuk menghitung eSense,
teknologi dari Neurosky mengolah sinyal gelombang otak dan menghilangkan
noise dan gerakan otot. Hal ini dapat menunjukkan seberapa efektif pengguna
terlihat dalam keadaan perhatian (mirip dengan konsentrasi) atau meditasi (mirip
dengan relaksasi). Namun pada dasarnya, kemampuan manusia untuk fokus dan
releksasi berbeda antara satu dengan yang lain.
Untuk setiap jenis yang berbeda dari eSense (Attention dan Meditation),
nilai meter dilaporkan pada skala eSense relatif 1 sampai 100. Pada skala ini, nilai
antara 40 sampai 60 pada saat tertentu dalam waktu dianggap "netral". Nilai 60
sampai 80 dianggap "sedikit lebih tinggi", dan dapat ditafsirkan sebagai tingkat
cenderung lebih tinggi dari normal. Nilai 80 hingga 100 dianggap "ditinggikan",
yang berarti terindikasi tingkat tinggi dari eSense itu. Demikian pula, di ujung lain
dari skala, nilai antara 20 sampai 40 mengindikasikan "mengurangi" tingkat dari
eSense, sementara nilai antara 1 sampai 20 menunjukkan "sangat menurunkan"
tingkat dari eSense.
Nilai meteran eSense 0 adalah nilai khusus yang menunjukkan ThinkGear
tidak dapat menghitung tingkat eSense dengan jumlah yang wajar dari
kehandalan. Hal ini karena kebisingan yang berlebihan seperti yang dijelaskan di
bagian poor signal quality di atas (San Jose.2010).
2.4.2 Esense Attantion (Perhatian)
Esense Perhatian menunjukkan intensitas tingkat mental pengguna "fokus" atau
aktivitas mental. Nilainya berkisar dari 0 sampai 100. Gangguan biasanya terjadi
karena kurangnya fokus, atau kecemasan dapat menurunkan nilai pembacaan.
Data eSense Attention menyatakan mental states pengguna headset yang
berhubungan dengan konsentrasi pikiran. Pada pengujian yang dilakukan
sebelumnya sejumlah cara digunakan untuk meningkatkan nilai data ini yaitu
dengan memfokuskan pikiran pada suatu hal, fokus pada hal yang disukai,
melakukan perhitungan matematis, dan mendengarkan seseorang bicara dengan
penuh perhatian (San Jose. 2009). Tingkat konsentrasi pikiran pengguna headset
dikatakan mulai meningkat apabila mencapai nilai eSense meter 60 – 80 dari jangkauan nilai pengukuran 0~100 (San Jose, 2010).
2.4.3 Esense Metitation (Meditasi)
Esense Meditasi menunjukkan tingkat mental "ketenangan" pengguna atau
"relaksasi". Nilainya berkisar dari 0 sampai 100. Perhatikan bahwa meditasi
adalah ukuran dari kondisi mental seseorang, bukan tingkat fisik, sehingga saat
merilexkan semua otot tubuh mungkin tidak segera menghasilkan tingkat meditasi
tinggi. Namun, bagi kebanyakan orang dalam keadaan yang paling normal, santai
tubuh sering membantu pikiran untuk bersantai juga. Meditasi berhubungan
dengan penurunan aktivitas dengan proses mental yang aktif di otak. Gangguan,
mengembara pikiran, kecemasan, agitasi, dan rangsangan sensorik dapat
menurunkan hasil dari pembacaan (NeuroSky. Inc, 2009).
Data eSense Meditation menyatakan mental states pengguna headset yang
berhubungan dengan relaksasi pikiran. Tingkat relaksasi pikiran pengguna headset
dapat ditingkatkan melalui beberapa cara, diantaranya adalah mengambil napas
dalam-dalam dan perlahan-lahan menghembuskannya, merelakskan semua otot
pada tubuh, mengosongkan pikiran, dan menutup mata (San Jose. 2009). Sama
halnya dengan eSense Attention, tingkat eSense Meditation pengguna headset
2.5 Mikrokontroller At-Mega 32A
Dalam membangun suatu sistem elektronik yang berbasis pada pengontrolan dan
proses data, diperlukan sebuah IC yang dapat bekerja sebagai otak, dimana pada
IC tersebut akan di tanamkan algoritma program, sehingga alat tersebut mampu
bekerja sesuai dengan algoritme yang ditanamkan. Konfigurasi PIN pada
microocntroller Atmega32 ditunjukkan pada gambar dibawah ini.
[image:46.595.150.506.233.420.2]
(a) (b)
Gambar 2.7 (a)Konfigurasi pin ATmega32, (b) Bentuk ATmega32
(ATMEL, 2009)
Sebagai pengontrol dan pengolah data kali ini digunakan microcontroller
8 bit produksi ATMEL jenis ATmega32. IC ini dipilih karena telah memiliki
memori yang cukup besar yakni 32 kbyte flash. Sebagai pengontrol dan pengolah
data kali ini digunakan microcontroller 8 bit produksi ATMEL jenis ATmega32.
IC ini dipilih karena telah memiliki memori yang cukup besar yakni 32 kbyte
flash.
ATmega32 merupakan microcontroller dengan arsitektur RISC. Memiliki
32 register dengan fungsi umum yang mana setiap regisiter-nya memiliki
hubungan secara langsung dengan arithmetic logic unit (ALU), sehingga
memperbolehkan 2 register yang independen dapat di akses dalam satu instruksi
unggal dalam satu siklus clock. Arsitektur ini memiliki keistimewaan 10 kali lebih
ATmega32 memiliki fitur sebagai berikut, antara lain yakni memiliki 32
Kbytes pada memori In-System Programmable Flash Program dengan
kemampuan Read-While-Write, 1024 bytes EEPROM, 2 Kbyte SRAM, 32 kanal
multi guna I/O, 32 register multi guna.
ATMega32 memiliki 8 kanal ADC 10 bit yang memungkinkan untuk
mengkonversi sinyal analog menjadi digital yakni sebanyak 8 kanal dengan
resolusi lebih tinggi dibandingkan ADC 8 bit. Memiliki 3 mode timer/counter
yang fleksibel memungkinkan microcontroller untuk melakukan penghitungan
maupun pewaktuan sehingga memungkinkan untuk mengukur frekuensi osilasi
suatu sinyal. Serial programmable USART juga dimiliki untuk keperluan
komunikasi serial antar peralatan muapun komputer. Masih banyak lagi beberapa
kemampuan ATmega32 yang dapat diaplikasikan dengan berbagai keperluan.
Atmel AVR ATmega32 telah di dukung oleh bahasa pemrograman dan
pengembangan sistem antara lain: C compilers, macro assemblers, program
debugger/simulators, in-circuit emulators, dan evaluation kits (Isnen.M, 2014).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga
ATtiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya
yang membedakan masing-masing kelas adalah memori, peripheral, dan
fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa
dikatakan hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk
Atmel, yaitu ATMega32. Selain mudah didapatkan dan lebih murah, ATMega32
juga memiliki fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu ATTiny,
AVR klasik, dan ATMega.
Perbedaannya hanya pada fasilitas dan I/O yang tersedia serta fasilitas lain
seperti ADC, EEPROM, dan lain sebagainya. Memiliki teknologi RISC dengan
kecepatan maksimal 16 MHz membuat ATMega32 lebih cepat bila dibandingkan
dengan varian MCS51. Dengan fasilitas yang lengkap tersebut menjadikan
ATMega32 sebagai mikrokontroler yang powerfull. Adapun blok diagramnya
Gambar 2.8 Blok Diagram ATMega32
Mikrokontroler ATMega32 mempunyai jumlah pin sebanyak 40 buah, dimana 32
pin digunakan untuk keperluan I/O yang dapat menjadi I/O sesuai konfigurasi.
Pada 32 pin tersebut terbago atas 4 bagian (Port), yang masing-masing terdiri dari
8 pin. Pin-pin yang lainnya digunakan untuk keperluan rangkaian osilator, suplay,
reset serta tegangan frekuensi untuk ADC. Berikut deskripsi Pin pada Atmega32.
VCC : berfungsi sebagai suplay digital 5 volt
GND : berfungsi sebagai ground
dikonversi ke digital. Port A juga berfungsi sebagai kanal input/output dengan
resistor pull-up internal, jika analog ke digital konverter tidak di gunakan (dengan
mengatur fuse bit_nya).
Port B (PB7..PB0) : Port B adalah kanal input/output sebanyak 8 bit dengan
resistor pull-up internal. Selain itu Port B memiliki fungsi
[image:49.595.119.508.253.443.2]khusus seperti di tuliskan pada Tabel 2.2.
Tabel 2.2. Fungsi-fungsi yang dimiliki PORT B, Atmega32
Sumber: ATMEL, 2009
Port C (PC7..PC0) : Port C juga merupakan kanal 8 bit input/output dengan
resistor pull-up internal. Port C memiliki fungsi khusus
seperti di tunjukkan pada Tabel 2.3.
Tabel 2.3. Fungsi-fungsi yang dimiliki PORT C, Atmega32
[image:49.595.114.517.574.723.2]Port D (PD7..PD0) : Port D adalah kanal input/output sebanyak 8 bit dengan
resistor pull-up internal. Selain itu Port D memiliki fungsi
[image:50.595.112.513.188.346.2]khusus seperti di tuliskan pada Tabel 2.4.
Tabel 2.4. Fungsi-fungsi yang dimiliki PORT D, Atmega32
Sumber: ATMEL, 2009
RESET : merupakan masukan pulsa untuk me-reset program yang sedang
berjalan.
XTAL1 : jalur masukan ke osilasi penguat inverting dan merupakan masukan
ke clock internal.
XTAL2 : jalur keluaran dari osilasi penguat inverting.
AVCC : AVCC adalah tegangan suplay untuk port A maupun ADC.
Apabila ADC tidak di gunakan, pin ini harus terhubung secara
eksternal ke VCC. Jika ADC digunakan, maka pin ini sebaiknya
terhubung ke VCC melalui low pass filter.
AREF : AREF adalah tegangan referensi analog untuk ADC.
(ATMEL, 2009)
2.6 Arduino
Arduino adalah platform pembuatan prototipe elektronik yang bersifat
open-source hardware yang berdasarkan pada perangkat keras dan perangkat lunak
desainer, dan siapapun yang tertarik dalam menciptakan objek atau lingkungan
yang interaktif.
Arduino pada awalnya dikembangkan di Ivrea, Italia. Nama Arduino
adalah sebuah nama maskulin yang berarti teman yang kuat. Platform arduino
terdiri dari arduino board, shield, bahasa pemrograman arduino, dan arduino
development environment. Arduino board biasanya memiliki sebuah chip dasar
mikrokontroler Atmel AVR ATmega8 berikut turunannya. Shield adalah sebuah
papan yang dapat dipasang diatas arduino board untuk menambah kemampuan
dari arduino board.
Bahasa pemrograman arduino adalah bahasa pemrograman yang umum
digunakan untuk membuat perangkat lunak yang ditanamkan pada arduino board.
Bahasa pemrograman arduino mirip dengan bahasa pemrograman C++
2.6.1 Arduino Uno
Arduino Uno adalah arduino board yang menggunakan mikrokontroler
ATmega328. Arduino Uno memiliki 14 pin digital (6 pin dapat digunakan sebagai
output PWM), 6 input analog, sebuah 16 MHz osilator kristal, sebuah koneksi
USB, sebuah konektor sumber tegangan, sebuah header ICSP, dan sebuah tombol
reset. Arduino Uno memuat segala hal yang dibutuhkan untuk mendukung sebuah
mikrokontroler. Hanya dengan menhubungkannya ke sebuah komputer melalui
USB atau memberikan tegangan DC dari baterai atau adaptor AC ke DC sudah
dapat membuanya bekerja. Arduino Uno menggunakan ATmega16U2 yang
diprogram sebagai USB-to-serial converter untuk komunikasi serial ke computer
melalui port USB.
Adapun data teknis board Arduino UNO R3 adalah sebagai berikut: Mikrokontroler : ATmega328
Tegangan Operasi : 5V
Tegangan Input (recommended) : 7 - 12 V Tegangan Input (limit) : 6-20 V
Pin digital I/O : 14 (6 diantaranya pin PWM)
Arus DC per pin I/O : 40 mA Arus DC untuk pin 3.3 V : 150 mA
Flash Memory : 32 KB dengan 0.5 KB digunakan untuk bootloader
SRAM : 2 KB EEPROM : 1 KB
Kecepatan Pewaktuan : 16 Mh
2.6.1.1Pin Masukan dan Keluaran Arduino Uno
Masing-masing dari 14 pin digital arduino uno dapat digunakan sebagai masukan
atau keluaran menggunakan fungsi pinMode(), digitalWrite() dan digitalRead().
Setiap pin beroperasi pada tegangan 5 volt. Setiap pin mampu menerima atau
menghasilkan arus maksimum sebasar 40 mA dan memiliki resistor pull-up
internal (diputus secara default) sebesar 20-30 KOhm. Sebagai tambahan,
beberapa pin masukan digital memiliki kegunaan khusus yaitu :
Komunikasi serial: pin 0 (RX) dan pin 1 (TX), digunakan untuk menerima(RX) dan mengirim(TX) data secara serial.
External Interrupt: pin 2 dan pin 3, pin ini dapat dikonfigurasi untuk memicu
sebuah interrupt pada nilai rendah, sisi naik atau turun, atau pada saat terjadi
perubahan nilai.
Pulse-width modulation (PWM): pin 3,5,6,9,10 dan 11, menyediakan
keluaran PWM 8-bit dangan menggunakan fungsi analogWrite().
Serial Peripheral Interface (SPI): pin 10 (SS), 11 (MOSI), 12 (MISO) dan 13
(SCK), pin ini mendukung komunikasi SPI dengan menggunakan SPI library. LED: pin 13, terdapat built-in LED yang terhubung ke pin digital 13. Ketika pin bernilai HIGH maka LED menyala, sebaliknya ketika pin bernilai LOW
maka LED akan padam.
Arduino Uno memiliki 6 masukan analog yang diberi label A0 sampai A5, setiap
pin menyediakan resolusi sebanyak 10 bit (1024 nilai yang berbeda). Secara
default pin mengukur nilai tegangan dari ground (0V) hingga 5V, walaupun
AREF dan fungsi analog Reference(). Sebagai tambahan beberapa pin masukan
analog memiliki fungsi khusus yaitu pin A4 (SDA) dan pin A5 (SCL) yang
digunakan untuk komunikasi TWI atau I2C dengan menggunakan Wire library
2.6.1.2Sumber Daya dan Pin Tegangan Arduino Uno
Arduino uno dapat diberi daya melalui koneksi USB atau melalui power supply
eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara
bersamaan maka arduino uno akan memilih salah satu sumber daya secara
otomatis untuk digunakan. Power supplay external (yang bukan melalui USB)
dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke
soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang
dibubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada
konektor POWER.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika
arduino uno diberi tegangan di bawah 7 volt, maka pin 5V akan menyediakan
tegangan di bawah 5 volt dan arduino uno munkin bekerja tidak stabil. Jika
diberikan tegangan melebihi 12 volt, penstabil tegangan kemungkinan akan
menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang
diberikan ke arduino uno berkisar antara 7 sampai 12 volt.
Pin-pin tegangan pada arduino uno adalah sebagai berikut :
Vin adalah pin untuk mengalirkan sumber tegangan ke arduino uno ketika menggunakan sumber daya eksternal (selain dari koneksi USB atau sumber
daya yang teregulasi lainnya). Sumber tegangan juga dapat disediakan
melalui pin ini jika sumber daya yang digunakan untuk arduino uno dialirkan
melalui soket power.
5V adalah pin yang menyediakan tegangan teregulasi sebesar 5 volt berasal dari regulator tegangan pada arduino uno.
3V3 adalah pin yang meyediakan tegangan teregulasi sebesar 3,3 volt berasal dari regulator tegangan pada arduino uno.
2.6.1.3Peta Memori Arduino Uno
Arduino Uno adalah arduino board yang menggunakan mikrokontroler
ATmega328. Maka peta memori arduino uno sama dengan peta memori pada
mikrokontroler ATmega328.
2.6.1.4Memori Program
ATMega328 memiliki 32K byte On-chip In-System Reprogrammable Flash
Memory untuk menyimpan program. Memori flash dibagi kedalam dua bagian,
yaitu bagian program bootloader dan aplikasi seperti terlihat pada Gambar 2.10.
Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang
[image:54.595.258.372.340.519.2]dapat memasukkan seluruh program aplikasi ke dalam memori prosesor.
Gambar 2.9 Peta Memori Program ATMega 328
2.6.1.5Memori Data
Memori data ATMega328 terbagi menjadi 4 bagian, yaitu 32 lokasi untuk register
umum, 64 lokasi untuk register I/O, 160 lokasi untuk register I/O tambahan dan
sisanya 2048 lokasi untuk data SRAM internal. Register umum menempati alamat
data terbawah, yaitu 0x0000 sampai 0x001F. Register I/O menempati 64 alamat
berikutnya mulai dari 0x0020 hingga 0x005F. Register I/O tambahan menempati
mulai dari 0x0100 hingga 0x08FF digunakan untuk SRAM internal. Peta memori
[image:55.595.261.367.132.390.2]data dari ATMega 328 dapat dilihat pada Gambar 2.11.
Gambar 2.10 Peta Memori Data ATMega 328
2.6.1.6Memori Data EEPROM
Arduino uno terdiri dari 1 Kbyte memori data EEPROM. Pada memori EEPROM,
data dapat ditulis/dibaca kembali dan ketika catu daya dimatikan, data terakhir
yang ditulis pada memori EEPROM masih tersimpan pada memori ini, atau
dengan kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM
dimulai dari 0x000 hingga 0x3FF ( Jefry,Yutanto.2016).
2.7 Wireless
Wireless yaitu koneksi antar suatu perangkat dengan perangkat lainnya tanpa
menggunakan kabel dalam mengirimkan sinyal. Gelombang radio dan sinar infra
merah biasa digunakan untuk komunikasi wireless. Dalam sistem komunikasi
wireless terdapat perangkat atau bagian umum gelombang yang berperan yang
1. Gelombang elektromagnetik.
2. Gelombang mikro.
3. Gelombang radio.
4. Infra merah.
5. Satelit.
Komunikasi wireless memiliki beberapa karekteristik, diantaranya adalah :
1. Menggunakan sebuah media antena dalam mengirim dan menerima sinyal
elektromagnetik.
2. Rentan intereferensi.
3. Umumnya menggunakan 2 GHz – 40 Ghz.
4. Point to point, point to multi point, access point.
5. Semakin tinggi frekuensi yang digunakan maka semakin besar potensial
bandwidth dan rate datanya, namun semakin pendek jaraknya.
Adapun kelebihan wireless:
1. Mobility, sistem wireless LAN bisa menyediakan user dengan informasi
access yang real-time, dimana saja dalam suatu organisasi. Mobilitas
semacam ini sangat mendukung produktivitas dan peningkatan kualitas
pelayanan apabila dibandingkan dengan jaringan kabel.
2. Installation speed and simplicity, instalasi sistem wireless LAN bisa cepat
dan sangat mudah dan bisa mengeliminasi kebutuhan penarikan kabel yang
memalui atap atau pun tembok.
3. Installation flexibility, teknologi wireless memungkinkan suatu jaringan
untuk bisa mencapai tempat-tempat yang tidak dapat dicapai dengan jaringan
kabel.
4. Reduced cost-of-owner ship, meskipun investasi awal yang dibutuhkan oleh
wireless LAN untuk membeli perangkat hardware bisa lebih tinggi dari pada
biaya yang dibutuhkan oleh perangkat wire LAN hardware, namun bila di
perhitungkan secara keseluruhan, instalasi dan life-cycle cost-nya, maka
secara signifikan lebih murah. Dan bila digunakan dalam lingkungan kerja
yang dinamis yang sangat membutuhkan seringnya pergerakan dan perubahan
yang sering maka keuntungan jangka panjanganya pada suatu wireless LAN
5. Scalability, sistem wireless LAN bisa dikonfigurasi dalam berbagai macam
topologi untuk memenuhi kebutuhan pangguna yang beragam, konfigurasi
dapat dengan mudah diubah mulai dari jaringan peer-to-peer yang sesuai
untuk jumlah pengguna yang kecil sampai ke full infrastructure network yang
mampu melayani ribuan user dan memungkinkan roaming dalam area yang
luas (Fitri. Annisa, 2015).
2.8 Transmisi Sinyal Radio
Transmisi data adalah proses yang terjadi antara transmitter dan receiver melalui
suatu media transmisi yang diklasifikasikan menjadi dua bagian yaitu guided
media dan unguided media. Apabila guided media mengacu pada media transmisi
fisik berupa kabel sedangkan unguided media mengacu pada transmisi nirkabel.
Tujuan dari sebuah sistem komunikasi data adalah pertukaran data secara
elektronik antara dua belah pihak.
Radio merupakan transmisi wireless, yang menangkap sinyal melalui
gelombang elektromagnetik (electromagnetic waves). Gelombang
elektromagnetik hadir pada semua tingkatan frekuensi. Subset kecil dari tingkatan
frekuensi yang umum adalah spektrum Radio Frequency (RF) dengan range 9
KHz sampai 300 GHz. Seorang ilmuwan Jerman, Heinrich Hertz,
mendemonstrasikan energi elektrikal (tahun 1887) yang dapat ditransmisikan
melalui ruang gelombang elektromagnetik. Menyusul kemudian, seorang ilmuwan
italia, Guglielmo Marconi, terinspirasikan temuan Hertz, dan lahirlah radio
pertama melalui kreasinya.Radio mentransmisi dan menerima sinyal melalui area
luas dalam bentuk gelombang elektromagnetik, pada tingkat frekuensi tertentu
yang berbeda dengan gelombang elektromagnetis lainnya, seperti spektrum
inframerah dan sinar rontgen (x-rays).
Jaringan wireless menggunakan gelombang radio (Radio Frequency/RF)
untuk melakukan komunikasi data antara transmitter dan receiver. Komunikasi
data merupakan proses pentransmisian data secara elektronik melalui media
Sistem komunikasi wireless dengan frekuensi radio terdiri dari perangkat
perangkat yang diantaranya adalah :
a. Data (Input)
Yang termasuk data pada komunkasi wireless ini bisa berupa video, audio.
b. Modem (modulator dan demodulator)
Modulasi adalah .proses perubahan (varying) suatu gelombang periodik
sehingga menjadikan suatu sinyal mampu membawa suatu informasi. Dengan
proses modulasi, suatu informasi (biasanya berfrekuensi rendah) bisa
dimasukkan ke dalam suatu gelombang pembawa, biasanya berupa
gelombang sinus berfrekuensi tinggi. Terdapat tiga parameter kunci pada
suatu gelombang sinusiuodal yaitu : amplitudo, fase dan frekuensi. Ketiga
parameter tersebut dapat dimodifikasi sesuai dengan sinyal informasi
(berfrekuensi rendah) untuk membentuk sinyal yang termodulasi.
Peralatan untuk melaksanakan proses modulasi disebut modulator,
sedangkan peralatan untuk memperoleh informasi informasi awal (kebalikan
dari dari proses modulasi) disebut demodulator dan peralatan yang
melaksanakan kedua proses tersebut disebut modem (Bery. Erik, 2016).
Berikut beberapa tujuan dari Modulasi:
1. Transmisi menjadi efisien atau memudahkan pemancaran.
2. Menekan derau atau interferensi.
3. Untuk memudahkan pengaturan alokasi frekuensi radio.
4. Untuk multiplexing: proses penggabungan beberapa sinyal informasi untuk
disalurkan secara bersama-sama melalui satu kanal transmisi.
c. Transmitter
Transmitter merupakan interface yang memodulasi bit stream digital ke
dalam bentuk gelombang elektromagnetik yang tepat serta mampu
mempropogasikan gelombang tersebut melalui saluran komunikasi.
Transmitter adalah bagian dari sistem komunikasi wireless yang berfungi
untuk mengirimkan data ke tempat lain berupa gelombang radio.
d. Receiver
Receiver berperan untuk menerima data atau sinyal yang dikirimkan oleh
2.9 RF 433 MHz
RF 433 Mhz (modul frekuensi radio) adalah perangkat elektronik (biasanya) kecil
yang digunakan untuk mengirim dan menerima sinyal radio antara dua perangkat.
Modul RF 433Mhz link kit terdiri dari pemancar