I. Pendahuluan
Bab ini memberikan latar belakang pentingnya pengembangan alat ukur luas tanah otomatis, mengidentifikasi masalah yang dihadapi dalam metode konvensional, dan menjelaskan tujuan dari proyek rancang bangun alat ukur luas tanah berbasis mikrokontroler dan antarmuka pengguna Android. Latar belakang menekankan inefisiensi dan keterbatasan metode manual yang ada, seperti penggunaan meteran dan teodolit, yang meliputi proses perhitungan manual, biaya tinggi, ukuran alat yang besar dan berat, serta kebutuhan tenaga kerja yang banyak. Proyek ini bertujuan untuk mengatasi kekurangan tersebut dengan menawarkan solusi yang efisien, akurat, dan praktis.
1.1 Latar Belakang
Bagian ini menjelaskan kekurangan metode pengukuran luas tanah konvensional yang masih manual dan mahal. Dibandingkan dengan metode manual, alat yang dirancang menawarkan efisiensi waktu dan biaya, serta kemudahan dalam penggambaran denah. Pembahasan mencakup metode-metode matematika seperti Pythagoras, trigonometri, dan Heron yang relevan dengan pengukuran luas dan panjang, menunjukkan pemahaman teoritis yang mendasari desain alat. Integrasi teknologi mikrokontroler dan antarmuka Android memberikan nilai tambah dalam mencapai otomatisasi dan visualisasi data.
1.2 Rumusan Masalah
Bagian ini merumuskan lima pertanyaan penelitian yang spesifik dan terarah, menuntun pembaca memahami ruang lingkup penelitian. Rumusan masalah mencakup pembuatan alat ukur panjang, sistem pengontrol arah alat ukur, penerapan metode perhitungan luas tanah (Pythagoras, trigonometri, Heron), penentuan sudut horizontal, dan pembuatan aplikasi Android untuk pengukuran dan visualisasi denah. Kelima pertanyaan ini menunjukkan struktur berpikir logis dan sistematis dalam memecahkan masalah yang kompleks.
1.3 Maksud dan Tujuan
Bagian ini menjelaskan maksud dan tujuan penelitian secara jelas dan terukur. Maksudnya adalah meningkatkan efisiensi waktu, biaya, dan tenaga kerja dalam pengukuran. Tujuannya adalah mencapai otomatisasi pengukuran, visualisasi denah hasil pengukuran, dan kecepatan dalam memperoleh hasil. Pernyataan maksud dan tujuan menunjukkan keselarasan dengan rumusan masalah dan latar belakang, memberikan kerangka kerja yang kokoh bagi penelitian.
1.4 Batasan Masalah
Bagian ini menetapkan batasan-batasan spesifik untuk membatasi ruang lingkup penelitian dan memfokuskan pada aspek-aspek terpenting. Batasan masalah mencakup penggunaan mikrokontroler Arduino UNO, pengambilan data manual dengan proses otomatis, fungsi mikrokontroler yang terbatas pada penggerak servo, visualisasi melalui smartphone Android, pemindahan alat secara manual, jarak pengukuran maksimum dan minimum, serta kemampuan mengukur empat titik dengan bentuk bebas. Pembatasan ini memastikan kelayakan dan keberhasilan penelitian dalam batas waktu dan sumber daya yang tersedia.
1.5 Metodologi Penelitian
Bagian ini menjelaskan metodologi yang digunakan dalam penelitian, yang meliputi studi literatur, metode perancangan, metode pembuatan, metode pengujian, dan metode analisis. Studi literatur memberikan landasan teoritis, metode perancangan menguraikan proses desain alat, metode pembuatan menjelaskan proses perakitan, metode pengujian menjelaskan proses validasi alat dan aplikasi, dan metode analisis menjelaskan proses interpretasi data. Penjelasan metodologi ini memastikan kredibilitas dan transparansi proses penelitian.
1.6 Sistematika Penulisan
Bagian ini memberikan gambaran umum tentang struktur laporan tugas akhir. Sistematika penulisan mencakup bab pendahuluan, teori penunjang, perancangan sistem, hasil pengujian dan analisa, dan kesimpulan dan saran. Outline ini memberikan panduan navigasi yang jelas bagi pembaca untuk memahami alur dan isi laporan.
II. Teori Penunjang
Bab ini membahas teori-teori dan prinsip-prinsip dasar yang mendukung rancang bangun alat, meliputi alat ukur dan pengukuran, konsep luas dan perhitungan luas bidang tanah, teorema Pythagoras, trigonometri, dan Heron, serta penjelasan smartphone, accelerometer, gyroscope, sistem operasi Android, mikrokontroler, dan motor servo. Pembahasan ini memberikan landasan teoritis yang kuat bagi desain dan implementasi alat.
2.1 Alat Ukur dan Pengukuran
Bagian ini menjelaskan pengertian alat ukur, metrologi, dan prinsip-prinsip dasar pengukuran. Ditekankan pentingnya akurasi dan ketelitian dalam pengukuran, serta faktor-faktor yang dapat mempengaruhi hasil pengukuran. Penjelasan ini penting untuk memahami konsep dasar dalam pengembangan alat ukur yang akurat dan handal. Penjelasan juga mencakup sumber kesalahan dan bagaimana meminimalkannya.
2.2 Luas, Luas Bidang Tanah Beraturan, dan Tidak Beraturan
Bagian ini menjelaskan konsep luas dan satuannya, serta metode perhitungan luas untuk bidang beraturan dan tidak beraturan. Penjelasan ini memberikan dasar teoritis untuk perhitungan luas tanah yang akan dilakukan oleh alat yang dirancang. Penjelasan mencakup metode perhitungan luas berbagai bentuk geometri dan mengarahkan pada pentingnya metode Pythagoras, trigonometri, dan Heron untuk kasus-kasus bidang tanah yang tidak beraturan.
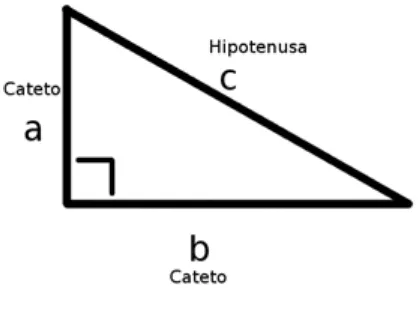
2.3 Teorema Pythagoras
Bagian ini menjelaskan teorema Pythagoras dan aplikasinya dalam menentukan panjang sisi segitiga siku-siku. Teorema ini digunakan untuk menghitung panjang sisi-sisi bidang tanah yang akan diukur. Penjelasan rumus dan contoh aplikasinya memberikan dasar matematis untuk menghitung panjang yang dibutuhkan dalam perhitungan luas.
2.4 Trigonometri
Bagian ini menjelaskan prinsip trigonometri dan aplikasinya dalam menghitung panjang sisi miring segitiga. Trigonometri digunakan untuk mengukur jarak dan sudut dalam pengukuran tanah. Penjelasan fungsi trigonometri dan penerapannya dalam konteks pengukuran luas tanah menunjukkan pemahaman konsep yang mendalam.
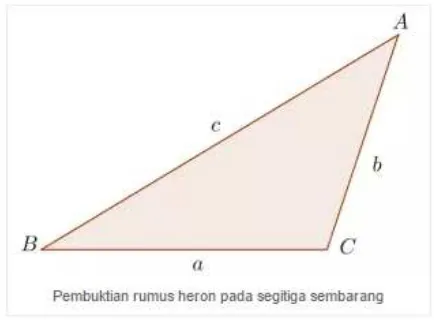
2.5 Teorema Heron
Bagian ini menjelaskan teorema Heron dan aplikasinya dalam menghitung luas segitiga jika diketahui panjang ketiga sisinya. Teorema Heron digunakan untuk menghitung luas tanah yang bentuknya tidak beraturan. Penjelasan rumus dan pembuktiannya memberikan pemahaman yang lengkap tentang konsep dan aplikasinya dalam konteks perhitungan luas tanah.
2.6 Smartphone
Bagian ini menjelaskan karakteristik umum smartphone dan perannya dalam sistem alat ukur luas tanah. Smartphone berfungsi sebagai antarmuka pengguna dan menampilkan hasil pengukuran. Penjelasan sistem operasi, fitur, dan kemampuan komputasi smartphone memberikan justifikasi untuk memilih smartphone sebagai komponen sistem. Penjelasan juga mencakup aspek-aspek penting seperti sistem operasi Android dan kemampuan konektivitasnya.
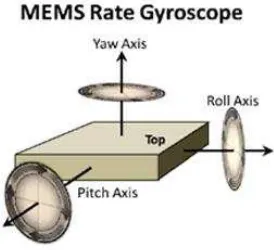
2.7 Accelerometer dan Gyroscope
Bagian ini menjelaskan fungsi accelerometer dan gyroscope dalam mengukur percepatan dan orientasi. Sensor ini berperan penting dalam mengukur sudut dan kemiringan. Penjelasan prinsip kerja dan output dari kedua sensor ini memberikan dasar pemahaman terhadap bagaimana sensor ini berguna dalam mengukur orientasi dan pergerakan alat ukur. Penjelasan juga mencakup konsep sumbu-sumbu koordinat dan bagaimana data dari sensor diterjemahkan menjadi informasi yang bermakna.
2.8 Android
Bagian ini menjelaskan sistem operasi Android dan fitur-fiturnya yang relevan dengan aplikasi pengukur luas tanah. Android digunakan sebagai platform untuk mengembangkan aplikasi antarmuka pengguna. Penjelasan fitur-fitur Android, seperti framework aplikasi, Dalvik Virtual Machine, dan API-nya, memberikan justifikasi bagi pemilihan platform Android. Penjelasan juga mencakup bahasa pemrograman yang digunakan (Java) dan proses pengembangan aplikasi.
2.9 Perangkat Keras
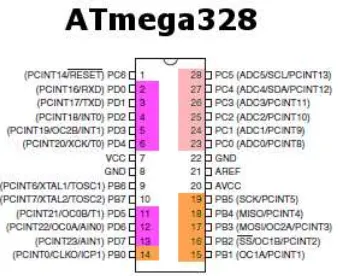
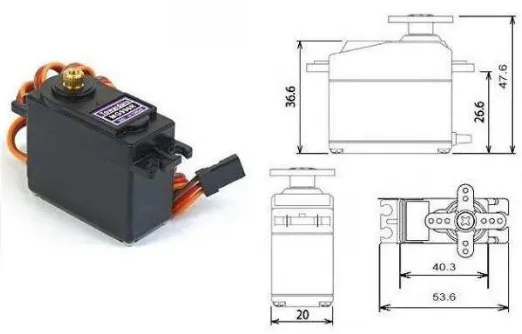
Bagian ini menjelaskan perangkat keras yang digunakan, yaitu mikrokontroler dan motor servo. Mikrokontroler mengontrol gerakan motor servo untuk mengarahkan alat ukur. Penjelasan spesifikasi mikrokontroler (Arduino UNO dengan Atmega328P-PU) dan motor servo (MG996R) memberikan detail teknis yang penting untuk memahami implementasi alat. Penjelasan mencakup pilihan komponen dan alasan di balik pilihan tersebut.
2.10 Perangkat Lunak
Bagian ini menjelaskan perangkat lunak yang digunakan, yaitu Android Studio dan Arduino IDE. Android Studio digunakan untuk mengembangkan aplikasi Android, sementara Arduino IDE digunakan untuk memprogram mikrokontroler. Penjelasan tentang Android Studio dan Arduino IDE, termasuk fitur dan kegunaannya, menunjukkan pemilihan perangkat lunak yang tepat untuk mengembangkan aplikasi dan memperogram mikrokontroler. Penjelasan juga mencakup proses kompilasi dan pengunggahan program ke mikrokontroler.
III. Perancangan Sistem
Bab ini menjelaskan perancangan sistem kontrol dan perangkat lunak dari alat ukur luas tanah. Perancangan sistem kontrol mencakup diagram blok, pemilihan mikrokontroler dan motor servo, serta penjelasan konektivitas antar komponen. Perancangan perangkat lunak mencakup use case diagram, class diagram, dan standard operation procedure (SOP).
3.1 Perancangan Sistem Kontrol
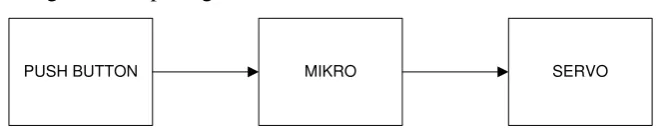
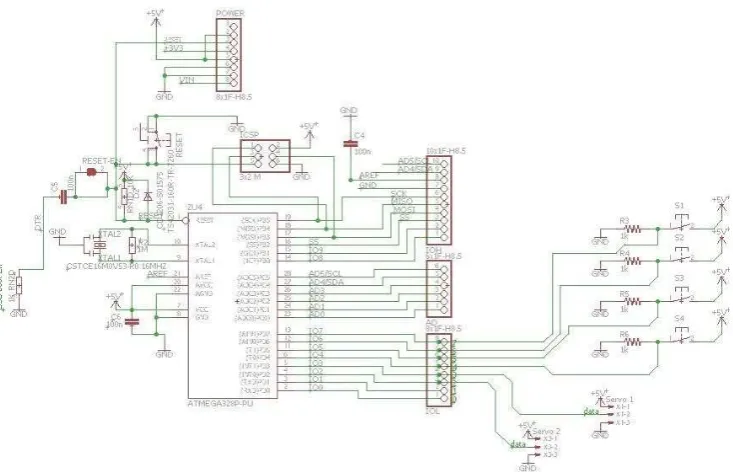
Bagian ini menjelaskan secara rinci perancangan sistem kontrol alat ukur, termasuk diagram blok sistem, pemilihan mikrokontroler dan motor servo, serta penjelasan konektivitas antar komponen. Pemilihan komponen dan alasannya dijelaskan secara detail, memberikan pemahaman yang menyeluruh tentang bagaimana sistem kontrol bekerja. Diagram blok memberikan gambaran visual tentang interaksi antar komponen.
3.2 Perancangan Perangkat Lunak
Bagian ini memaparkan perancangan perangkat lunak untuk aplikasi Android, termasuk use case diagram, class diagram, dan standard operating procedure (SOP). Use case diagram menggambarkan interaksi pengguna dengan sistem, class diagram menggambarkan struktur kelas dan relasi antar kelas, dan SOP menjelaskan langkah-langkah penggunaan alat secara sistematis. Ketiga elemen ini memberikan gambaran lengkap tentang desain perangkat lunak dan memberikan panduan bagi pengguna.
IV. Hasil Pengujian dan Analisa
Bab ini menyajikan hasil pengujian alat dan analisisnya. Pengujian mencakup pengujian alat (pengukuran jarak, sketsa denah, perbandingan perhitungan manual dan alat) dan pengujian lapangan. Analisis hasil pengujian membahas akurasi pengukuran, potensi kesalahan, dan faktor-faktor yang mempengaruhinya. Pembahasan ini memberikan evaluasi komprehensif terhadap kinerja alat.
4.1 Pengujian Alat
Bagian ini menjelaskan berbagai pengujian yang dilakukan pada alat, mulai dari pengujian pengukuran jarak pada berbagai ketinggian tripod, pengujian sketsa denah yang dihasilkan oleh aplikasi, dan perbandingan perhitungan luas tanah secara manual dengan perhitungan menggunakan alat. Hasil-hasil pengujian dijelaskan secara detail, disertai dengan data dan visualisasi (gambar). Analisis terhadap hasil pengujian memberikan evaluasi terhadap ketepatan dan kehandalan alat.
4.2 Pengujian Lapangan
Bagian ini menjelaskan hasil pengujian lapangan yang dilakukan untuk memvalidasi kinerja alat dalam kondisi nyata. Pengujian lapangan dilakukan sesuai SOP yang telah dirancang. Hasil pengujian lapangan, yang meliputi pengukuran jarak dan luas, dibandingkan dengan pengukuran manual sebagai pembanding. Analisis terhadap perbedaan hasil pengujian lapangan dan pengukuran manual memberikan informasi tentang performa alat dalam kondisi yang lebih realistis.
4.3 Analisa
Bagian ini menganalisis hasil pengujian secara menyeluruh, mengidentifikasi faktor-faktor yang menyebabkan kesalahan atau penyimpangan, dan memberikan penjelasan atas temuan-temuan tersebut. Analisa mencakup pembahasan tentang faktor-faktor yang mempengaruhi akurasi pengukuran, baik dari sisi perangkat keras maupun perangkat lunak. Analisa juga memberikan kesimpulan atas kinerja alat dan potensi pengembangan lebih lanjut.
V. Kesimpulan dan Saran
Bab ini merangkum kesimpulan dari penelitian dan memberikan saran untuk pengembangan lebih lanjut. Kesimpulan mencakup poin-poin penting yang dicapai dalam penelitian, sementara saran memberikan rekomendasi untuk peningkatan fungsionalitas dan akurasi alat di masa mendatang. Kesimpulan dan saran ini memberikan perspektif yang komprehensif atas hasil penelitian dan arahan bagi penelitian lanjutan.
5.1 Kesimpulan
Bagian ini menyimpulkan temuan-temuan penting dari penelitian, mencakup kinerja perangkat keras dan perangkat lunak, akurasi pengukuran, dan keterbatasan alat. Kesimpulan ini merupakan rangkuman dari seluruh bab sebelumnya, memberikan gambaran keseluruhan hasil penelitian. Kesimpulan dinyatakan secara jelas dan terukur, berdasarkan data dan analisis yang telah dilakukan.
5.2 Saran
Bagian ini memberikan saran-saran untuk pengembangan alat di masa mendatang, termasuk perbaikan pada sistem kontrol, peningkatan akurasi pengukuran, dan perluasan fungsionalitas alat. Saran ini bersifat konstruktif, memberikan arahan yang jelas bagi peneliti lain yang ingin mengembangkan alat ini lebih lanjut. Saran ini juga dapat digunakan sebagai pedoman bagi perbaikan desain dan implementasi alat di masa depan.