SISTEM MONITORING RUANGAN MENGGUNAKAN
KAMERA WEBCAM GANDA TIPE SF-1007 BERBASIS
RANGKAIAN ELEKTRONIK ARDUINO
TUGAS AKHIR
ARDY BERNARD SINAGA
092408026
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
SISTEM MONITORING RUANGAN MENGGUNAKAN
KAMERA WEBCAM GANDA TIPE SF-1007 BERBASIS
RANGKAIAN ELEKTRONIK ARDUINO
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar
Ahli Madya
ARDY BERNARD SINAGA
092408026
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : SISTEM MONITORING RUANGAN
MENGGUNAKAN KAMERA WEBCAM GANDA TIPE SF-1007 BERBASIS RANGKAIAN
ELEKTRONIK
Kategori : LAPORAN TUGAS AKHIR Nama : ARDY BERNARD SINAGA No.Induk Mahasiswa : 092408026
Program Studi : D3 FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM ( FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, 01 Juli 2012
Diketahui/ Disetujui oleh
Ketua Program Studi D3 Fisika Pembimbing
KATA PENGANTAR
Puji dan syukur penulis ucapkan kehadirat Tuhan Yang Maha Esa, atas berkat dan karuniaNya sehinga laporan Tugas Akhir ini dengan judul “SISTEM MONITORING RUANGAN MENGGUNAKAN KAMERA WEBCAM GANDA TIPE SF-1007 BERBASIS RANGKAIAN ELEKTRONIK ARDUINO “, dapat diselesaikan dengan baik.
Laporan ini disusun sesuai dengan percobaan-percobaan yang dilakukan dan disesuaikan dengan literatur yang ada ,baik dari buku penunjang maupun internet, sehingga berguna bagi semua orang yang akan memperoleh informasi laporan ini.
Dalam penulisan laporan ini, penulis banyak mengucapkan terimakasih kepada:
• Ibu Dr.Marpongahtun,M.sc selaku PD-1 Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
• Ibu Dr.Susilawati,M.Si selaku Ketua Program Studi D3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. • Bapak Dr. Kerista Tarigan,M.Eng.Sc selaku dosen pembimbing yang
telah membimbing dan mengarahkan penulis, sehingga laporan ini dapat diselesaikan dengan baik.
• Seluruh Dosen/Staff pengajar pada Program Studi D3 Fisika Instrumentasi.
• Kepada orang tua penulis Ayahanda P.Sinaga dan ibunda D.Br.Girsang yang telah memberi dukungan doa, semangat, pengertian, serta mencukupkan dana selama penulis menyelesaikan studi. “diate tupa ma bani nasiam”
• Buat adek-adekku yang sangat kukasihi, Helbert Sinaga, Rizal Fernando sinaga, Yuni Lestari Sinaga yang telah memberikan semangat dan dukungan kepada penulis sehingga dapat menyelesaiakan tugas akhir ini. • Bang Andika Siregar dan bang Waskito, yang telah membantu saya dalam
• Buat teman Partner saya Dewi Citra Manurung, dan teman-teman lainnya yaitu, Resmando Sinulingga, Harmoko Simangunsong, Jhon Meychael Purba, Jhonrisdo Samosir, Dear Purba, Agustina, Natalya Silalahi, Okto H Situmorang, Suryani Sitorus, Bernike N Ginting, serta semua teman-teman di Fisika Instrumentasi khususnya stambuk 2009 yang tidak dapat saya sebutkan satu persatu yang turut mendukung dan memberi masukan, sehingga laporan proyek ini dapat diselesaikan dengan baik.
Dalam rancangan alat ini masih terdapat hal-hal yang perlu disempurnakan. Penulis sangat mengharapkan kritik dan saran yang konstruktif bagi rakitan proyek ini sehingga menjadi peralatan yang lebih sempurna dan modern bagi dunia sains dan teknologi.
Akhir kata penulis mengucapkan banyak terimakasih kepada semua pihak yang membantu dalam menyelesaikan laporan proyek ini. Semoga Tuhan selalu memberkati.
ABSTRAK
DAFTAR ISI
halaman
KATA PENGANTAR……….. i
ABSTRAK………. ii
DAFTAR ISI……….. ii
DAFTAR TABEL………. iv
DAFTAR GAMBAR………. v
BAB I. PENDAHULUAN……… 1
1.1Latar Belakang Masalah……… 1
1.2Batasan Masalah………. 2
1.3Tujuan Penulisan………. 2
1.4Manfaat Penulisan……… 2
1.5Sistematika Penulisan………... 3
BAB II. LANDASAN TEORI……… 4
2.1 Motor DC………. 4
2.2 Driver Motor DC dengan IC L293D……… 6
2.3 KIT mikrokontroler Arduino Uno………... 8
2.3.1 Diagram blok dan Fungsi PIN pada Arduino………. 9
2.3.2 Mikrokontroler ATMega328……….. 13
2.3.2.1 Kontruksi Mikrokontroler ATMega328…… 13
2.3.2.2. Konfigurasi PIN ATMega328……….. 15
2.4 Pemrograman Dasar Arduino Uno……….. 17
2.4.1 Struktur Dasar Pemrograman Arduino……… 16
2.4.2 Struktur Pengaturan Program……… 18
2.4.3 Modulasi Lebar Pulsa (PWM)………. 20
2.5 Webcam……….. 23
2.6 Komputer Notebook Input/Output……… 24
BAB III.PERANCANGAN DAN SISTEM KERJA RANGKAIAN… 28
3.1. Diagram Blok Rancangan Sistem Monitoring……… 28
3.2. Konstruksi rancangan alat……….. 29
3.3 Rangkaian Interfacing Notebook Terhadap KIT Arduino …… 29
3.4.Rangkaian Driver Motor DC dengan IC L283D……… 30
3.5. Perancangan Power Supplay (PSA)……… 31
3.6. Pemrograman Perangkat Lunak Pada PC……… 33
3.7. Pemrograman Perangkat Lunak Pada Arduino……….. 36
BAB IV. PENGUJIAN ALAT DAN PROGRAM……… 43
4.1. Pengujian Rangkaian Power Supplay……… 43
4.1.1. Data Pengujian Rangkaian Power Supllay………… 43
4.1.2. Analisis Pengujian Rangkaian Power Supllay……… 44
4.2. Pegujian Rangkaian Driver Motor DC……….. 45
4.2.1. Data Pegujian Rangkaian Driver Motor DC………. 46
4.2.2. Analisis Pegujian Rangkaian Driver Motor DC……. 46
4.3. Pengujian Program pada KIT Arduino……….. 48
4.4 Pengujian Monitoring………. 50
4.4.1 Data Pengujian Monitoring………. 50
4.4.2 Analisis Pengujian Monitoring……… 54
BAB V. KESIMPULAN DAN SARAN……… 56
5.1 Kesimpulan………. 56
5.2 Saran……… 57
DAFTAR TABEL
halaman
Tabel 2.1. Konfigurasi Port B……… 14
Tabel 2.2. Konfigurasi Port C……….. 15
Tabel 2.3. Konfigurasi Port D……….. 15
Tabel 4.1 sumber tegangan pada power supply………..43
Table 4.2 Hasil pengukuran pengujian rangkaian PSA………..44
Table 4.3 Pengujian rangkaian Driver motor DC………...46
Table 4.1 data pengukuran monitoring secara horizontal kamera 1…50 Table 4.2 data pengukuran monitoring secara vertikal kamera 1……51
DAFTAR GAMBAR
halaman
Gambar 2.1. Kontruksi Motor DC……… 5
Gambar 2.2. Motor DC dan Jembatan H………. 7
Gambar 2.3. Board Arduino ATMega328………. 9
Gambar2.4 Konfigurasi PIN ATMega328………... 15
Gambar2.5 Modulasi lebar pulsa………. 22
Gambar 2.5. Webcam……… 23
Gambar 2.6. Layar Pemilih Jenis Projek……….. 25
Gambar2.7 Jendela Form Visual Basic……… 27
Gambar 3.1. Diagram Blok Rancangan Alat……… 27
Gambar 3.1 diagram blok rancangan system monitoring………….. 28
Gambar 3.2 Kontruksi rancangan alat……… 29
Gambar 3.2 kit Arduino Uno ATmega 328………30
Gambar 3.3. Rancangan Driver Motor DC dengan IC L293D…… 31
Gambar 3.4. Skematik Rangkaian Power Supplay……… 32
Gambar 3.5. Diagram Alir Program Pada notebook……….. 32
ATMega328 ……….. 36
Gambar 4.1. Pengujian Power Supplay……….. 43
ABSTRAK
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Sistem pemantauan kamera webcam dewasa ini semakin berkembang seiring dengan kemajuan teknologi dalam berbagai bidang.Penerapanya seperti pada pengawasan ruangan pada pabrik, kantor,tempat-tempat belanja dan lain-lain. Pengendalian kamera mekanis dari kamera webcam dengan memanfaatkan port serial pada personal computer merupakan salah satu alternative yang dapat digunakan untuk mengendalikan posisi atau bidik kamera. Seperti kita ketahui motor DC meupakan motor yang dikendalikan kecepatan dan arah putarnya.
1.2 Rumusan Masalah
Pada laporan tugas akhir ini, penulis membatasi masalah mengenai rancangan alat :
• Putaran motor DC digunakan untuk mengatur gerakan mekanis kamera Webcam.
• Modul arduino digunakan untuk mengatur arah putaran motor DC.
• Rancangan gerakan kamera webcam hanya digunakan untuk monitoring ruangan, tanpa menyimpan hasil monitoringnya pada PC yang digunakan.
1.3 Batasan Masalah
Adapun yang menjadi batasan masalah dalam laporan proyek ini adalah sebagai berikut:
Pembahasan secara umum pada bagian perangkat Lunak (software).
Pembahasan hardware dan software dari rancangan alat ini terbatas kepada penggunaanya dalam rangkaian dan tidak dibahas secara rinci.
Alat uji ini hanya difungsikan sebagai alat monitoring yang mampu menangkap tampilan suatu obyek dalam suatu ruangan dan hasilnya ditampilkan di PC.
1.4 Tujuan Penulisan
Adapun tujuan yang ingin dicapai dalam pembuatan alat proyek ini adalah:
1.5 Manfaat Penulisan
Manfaat penelitian rancangan alat ini adalah untuk memonitoring suatu ruangan atau tempat-tempat yang perlu dipantau, seperti Rumah Sakit, ATM, Bank, Kantor , dan lain-lain.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari monitoring keamanan ruangan menggunakan kamera webcam, maka penulis menulis laporan ini sebagai berikut:
BAB I PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah, manfaat penelitian, serta sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini berisi tentang teori dasar yang perlu dketahui untuk mempermudah dalam pemahaman prinsip kerja dari rangkaian pada sistem.
BAB III PERANCANGAN DAN SISTEM KERJA RAGKAIAN
BAB IV PENGUJIAN ALAT DAN PROGRAM
Pada bab ini berisi tentang pengujian sistem dan analisa rangkaian dari system alat proyek ini.
BAB V KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
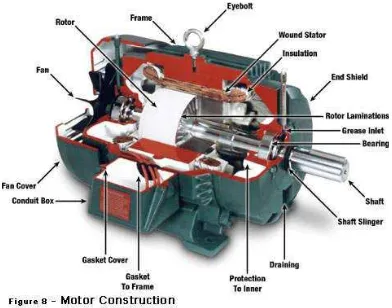
2.1 Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor.
Gambar 2.1 Kontruksi motor DC Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan
magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B.
2.2
Driver Motor DC dengan IC L293D
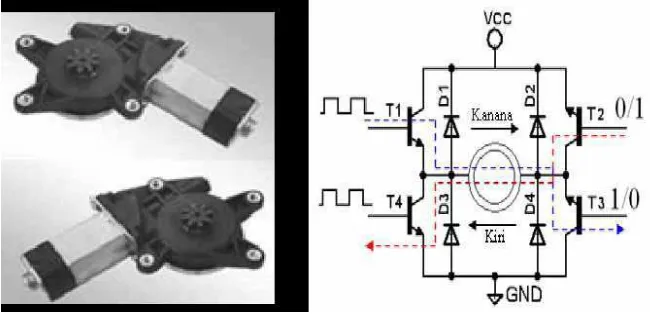
Pada dasarnya beberapa aplikasi yang menggunakan motor DC harus dapat mengatur kecepatan dan arah putar dari motor DC itu sendiri. Untuk dapat melakukan pengaturan kecepatan motor DC dapat menggunakan metode PWM (Pulse Width Modulation) sedangkan untuk mengatur arah putarannya dapat menggunakan rangkaian H-bridge yang tersusun dari 4 buah transistor. Tetapi dipasaran telah disediakan IC L293D sebagai driver motor DC yang dapat mengatur arah putar dan disediakan pin untuk input yang berasal dari PWM untuk mengatur kecepatan motor DC. Untuk lebih memahami tentang membangkitkan sinyal PWM menggunakan fitur Timer pada mikrokontroler AVR dapat membacanya pada postingan tutorial AVR tentang PWM. Sebelum membahas tentang IC L293D, alangkah baiknya jika kita membahas driver motor DC menggunakan rangkaian analog terlebih dahulu.
dibangkitkan melalui fitur Timer pada mikrokontroler. Sebagian besar power supply untuk motor DC adalah sebesar 12 V, sedangkan output PWM dari mikrokontroler maksimal sebesar 5 V.
Oleh karena itu digunakan transistor sebagai penguat tegangan. Dibawah ini adalah gambar driver motor DC menggunakan transistor. Salah satu jenis motor yang sering digunakan dalam bidang kontrol yaitu Motor DC. Motor DC akan berputar jika dialiri tegangan dan arus DC.
Gambar 2.2 Motor DC dan Jembatan H
Sistem pengaturan motor DC yang sering digunakan pada sistem kontrol yaitu dengan H-Bridge
yang pada pada dasarnya adalah 4 buah transistor yang difungsikan sebagai saklar. Pengaturan motor DC yaitu meliputi kecepatan dan arah. Pengaturan arah yaitu dengan cara membalik tegangan logika masukan H-bridge. Sedangkan sistem pengendalian kecepatan motor DC digunakan prinsip PWM (Pulse Width
Modulator) yaitu suatu metode pengaturan kecepatan putaran motor DC dengan
cycle maka tegangan ekivalennya semakin besar, begitu pula sebaliknya. Motor DC merupakan sebuah komponen yang memerlukan arus yang cukup besar untuk menggerakannya. Oleh karena itu motor DC biasanya memiliki penggerak tersendiri. Pada tugas akhir ini motor DC akan digerakkan dengan menggunakan PWM yang telah terintegrasi dengan rangkaian HBridge. Dengan rangkaian
H-Bridge yang memiliki input PWM ini, maka selain arah kita juga bisa
mengendalikan kecepatan putar motor DC tersebut.
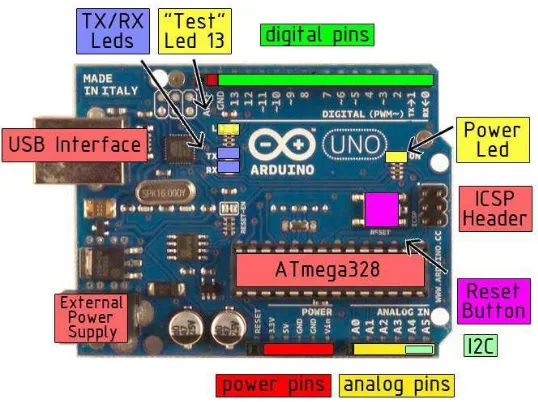
2.3 KIT Mikrokontroler Arduino Uno
Gambar 2.3 Board Arduino Uno ATmega328
2.3.1 Diagram Blok dan Fungsi PIN Pada Kit Arduino
Fungsi PIN pada kit Arduino , adalah sebagai berikut:
• PIN Power
Arduino dapat diberikan power melalui koneksi USB atau power supply. Powernya diselek secara otomatis. PIN power terdapat pada kaki 1 sampai kaki 6.
Power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat
dikoneksikan dengan mencolok jack adaptor pada koneksi port input supply.
Board arduino dapat dioperasikan menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari 7V, kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bisa menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 sampai 12 volt
Penjelasan pada pin power adalah sebagai berikut :
Vin
Tegangan input ke board arduino ketika menggunakan tegangan dari luar (seperti yang disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan). Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan power jack, aksesnya menggunakan pin ini.
5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh USB atau supply regulasi 5V lainnya.
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya adalah 50mA
Pin Ground berfungsi sebagai jalur ground pada arduino • Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM. Input dan Output Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected oleh default) 20- 50 KOhms.
Beberapa pin memiliki fungsi sebagai berikut :
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB FTDI ke TTL chip serial.
Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi analogWrite().
• Konektor USB
Konektor USB adalah soket untuk kabel USB yang disambungkan ke komputer atau laptop. Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai port komunikasi serial.
• Input / Output Digital
Input/Output Digital atau digital pin adalah pin-pin untuk menghubungkan Arduino dengan komponen atau rangkaian digital.Input/Output didital pada KIT arduino terdapat pada kaki 1 samapai kaki 13. Misalnya kalau ingin membuat LED berkedip, LED tersebut bisa dipasang pada salah satu pin I/O digital dan ground. Komponen lain yang menghasilkan output digital atau menerima input digital bisa disambungkan ke pin-pin ini. • Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog. Misalnya dari potensiometer, sensor suhu, sensor cahaya, dsb.
• Baterai / Adaptor
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan dari baterai/adaptor 9V pada saat Arduino sedang tidak disambungkan ke komputer. Kalau Arduino sedang disambungkan ke komputer melalui USB, Arduino mendapatkan suplai tegangan dari USB, jadi tidak perlu memasang baterai/adaptor saat memprogram Arduino. • Input dan Output
2.3.2 Mikrokontroler ATMega328
Mikrokontroller merupakan sebuah processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan computerainframe, mikrokontroller dibangun dari elemen – elemen dasar yang sama. Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakan instruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.
2.3.2.1 Kontruksi Mikrokontroler ATmega328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).
Mikrokontroller ini memiliki beberapa fitur antara lain :
• 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock. • 32 x 8-bit register serba guna.
• Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
• 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
• Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
• Memiliki pin I/O digital sebanyak 14 pin ,6 diantaranya PWM (Pulse Width Modulation) output.
Mikrokontroller ATmega 328 memiliki arsitektur Hardware, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock.
32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU (
EEPROM, dan fungsi I/O lainnya. Register – register ini menempati memori pada alamat 0x20h – 0x5Fh
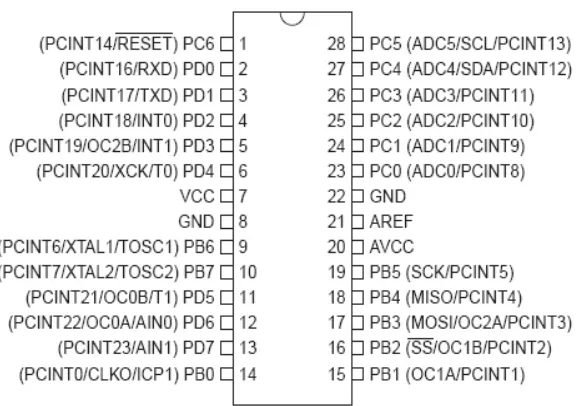
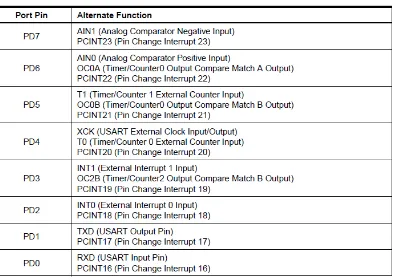
2.3.2.2Konfigurasi PIN ATMega328
Table 2.3 Konfigurasi Port C
2.4 Pemrograman Dasar Arduino Uno
2.4.1 Stuktur Dasar Pemrograman Arduino
Struktur dasar arduino hanya terjadi dalam dua bagian: Void setup()
{
// Statement; di eksekusi satu kali} Void loop()
{
// Statement; di eksekusi terus menerus }
• Setup
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali di jalankan. Ini digunakan untuk mendifinisikan mode pin atu memulaikomunikasi serial. Fungsi setup() harus di ikut sertakan dalam program ,walaupun tidak ada statement yang di jalankan.
Contoh pemrograman yang menggunakan fungsi setup sebagai berikut: Void setup ()
{
pinMode(3,OUTPUT) ; // men-set “pin” 3 sebagai Output pinMode(6, INPUT); // men-set pin 6 sebagai Input Serial.begin(9600);
}
Keterangan:
pinMode() = berfungsi untuk mengatur fungsi sebuah pin sebagaiINPUT atau OUTPUT.
• Loop
Setelah melakukan fungsi setup() maka secara langsung akanmelakukan fungsi loop() secara berurutan dan melakukan instruksi-instruksi ayang ada dalam fungsi loop().
void loop() {
If (digitalRead(6)==HIGH) // membaca input digital pin 6 {
xstart = millis(); //aktifkan timer digitalWrite(3, HIGH); // nyalakan pin 3
delay( 1 0 0 0 ) ; / / p a u s e 1 d e t i k digitalWrite(3, LOW); // matikan pin 3
} }
Keterangan:
o digitalWrite : Untuk memberikan nilai LOW dan HIGH pada sebuah
pin output.
o Delay : Untuk memberikan waktu tunda dalam satuan millisekon. o digitalRead : Untuk membaca logika LOW dan HIGH
2.4.2. Struktur Pengaturan Program
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan program:
if..else, dengan format seperti berikut ini:
if (kondisi) { }
else if (kondisi) { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan
diperiksa apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada
else yang akan dijalankan.
for, dengan format seperti berikut ini:
for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i–.
Input/Output Digital
a. pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah INPUT atau OUTPUT.
b. digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikan
HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
c. digitalRead(pin)
Input/Output Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam alam analog (menggunakan trik). Berikut ini cara untuk menghadapi hal yang bukan digital.
a) analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5, 6, 9, 10, 11. Ini dapat merubah pin hidup (on)atau mati (off) dengan sangat cepat sehingga membuatnya dapat berfungsi layaknya keluaran analog. Value
(nilai) pada format kode tersebut adalah angka antara 0 ( 0% duty cycle ~ 0V) dan 255 (100% duty cycle ~ 5V).
b) analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya. Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
2.4.3 Modulasi Lebar Pulsa (PWM)
Modulasi adalah suatu proses dimana parameter gelombang pembawa (carrier signal) frekuensi tinggi diubah sesuai dengan salah satu parameter sinyal informasi/pesan. Dalam hal ini sinyal pesan disebut juga sinyal pemodulasi. Proses modulasi dilakukan pada bagian pemancar. Proses kebalikannya yang disebut demodulasi dilakukan pada bagian penerima. Dalam demodulasi, sinyal pesan dipisahkan dari sinyal pembawa frekuensi tinggi.
adalah teknik modulasi durasi atau lebar waktu tunda positif ataupun tunda negative pulsa-pulsa persegi tersebut.
Rancangan alat ini menggunakan modulasi lebar pusa,atu sering disebut Pulse With Modulation (PWM). Modulasi lebar pulsa digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda.
Gambar2.5 Modulasi lebar pulsa
2.5 Webcam
[image:35.595.250.374.251.375.2]Webcam adalah kamera kecil yang dapat menangkap gambar serta video. Memasang webcam sangatlah mudah karena webcam memiliki fitur fungsionalitas USB pasang dan penggunaan yang mudah, dan semuanya itu hanya membutuhkan beberapa langkah mudah untuk memasang dan mengoperasikan webcam.
Gambar 2.5 Webcam
Webcam yang digunakan pada sistem tugas akhir ini yaitu produk dari Sun Flower dengan tipe SF- 1007. Spesifikasi dari webcamini yaitu :
1. Resolusi : 160x120, 176x144, 320x240, 352x288, 640x480. 2. Hasil record berformat data AVI.
3. Pengaturan fokus kamera terdapat pada sisi depan kamera yaitu secara manual.
4. Pengaturan pencahayaan putih (white balance)secara otomatis. 5. Dilengkapi built-in image compression.
2.6 Komputer Notebook Input/Output
Komputer Netbook merupakan perangkat utama pada sistem pengendalian orientasi webcam, karena disinilah pusat pengolahan data. Komputer tidak hanya sebagai pusat pengolah data, tetapi komputer juga berfungsi sebagai pengendali gerakan mekanis motor DC dan sebagai display untuk monitoring ruangan. Program pada computer Netbook adalah Input untuk rancangan alat ini. Kemudian data/Program tersebut akan dikirim pada arduino melalui port serial. Dengan menggunakan modul arduino, maka putaran motor DC dapat diatur. Kemudian kamera webcam akan bergerak kemanapun motor DC bergerak. Objek yang ditangkap oleh kamera webcam akan ditampilkan pada komputer. Output dari Komputer Netbook adalah tampilan dari kamera webcam, gerakan mekanis motor dan pengontrol gerakan motor.
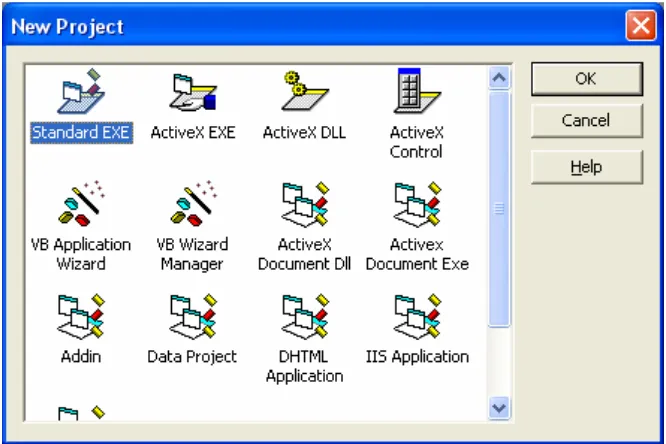
2.7 Visual Basic 6.0
Untuk memulai pembuatan program aplikasi di dalam Visual Basic, yang dilakukan adalah membuat project baru. Project adalah sekumpulan form, modul, fungsi, data dan laporan yang digunakan dalam suatu aplikasi. Membuat projrct baru dapat dilakukan dengan memilih menu [File] >> [New Project] atau dengan menekan ikon [new project] pada Toolbar yang terletak di pojok kiri atas. Setelah itu akan muncul konfirmasi untuk jenis project dari program aplikasi yan akan dibuat seperti terlihat pada gambar di bawah ini:
Gambar 2.6. Layar Pemilih Jenis Projek
Visual Basic 6.0 menyediakan 13 jenis project yang bisa dibuat seperti terlihat pada gambar 1.3 di atas. Ada beberapa project yang biasa digunakan oleh banyak pengguna Visual Basic, antara lain:
(2) ActiveX EXE: Project ini adalah project ActiveX berisi komponen-komponen kemampuan intuk berinteraksi dengan semua aplikasi di sistem operasi windows.
(3) ActiveX DLL: Project ini menghasilkan sebuah aplikasi library yang selanjutnya dapat digunakan oleh semua aplikasi di sistem operasi windows. (4) ActiveX Control: Project ini menghasilkan komponen-komponen baru untuk
aplikasi Visual Basic yang lain
(5) VB Application Wizard: Project ini memandu pengguna untuk membuat aplikasi secara mudah tanpa harus pusing-pusing dengan perintah-perintah pemrograman.
(6) Addin: Project seperti Standard EXE tetapi dengan berbagai macam komponen tambahan yang memungkinkan kebebasan kreasi dari pengguna. (7) Data project: Project ini melengkapi komponennya dengan
komponen-komponen database. Sehingga bisa dikatakan project ini memang disediakan untuk keperluan pembuatan aplikasi database.
(8) DHTML Application: Project ini digunakan untuk membuat aplikasi internet pada sisi client (client side) dengan fungsi-fungsi DHTML.
(9) IIS Application: Project ini menghasilkan apliaksi internet pada sisi server
(server side) dengan komponen-komponen CGI (Common Gateway
Interface).
untuk pembuatan program atau jendela kode (code windows). Hal ini Dapat dilakukan dengan cara memilih ikon jendela form atau jendela kode yang ada di [Project Explorer]
Gambar2.7 Jendela Form Visual Basic
BAB III
RANCANGAN DAN SISTEM KERJA RANGKAIAN
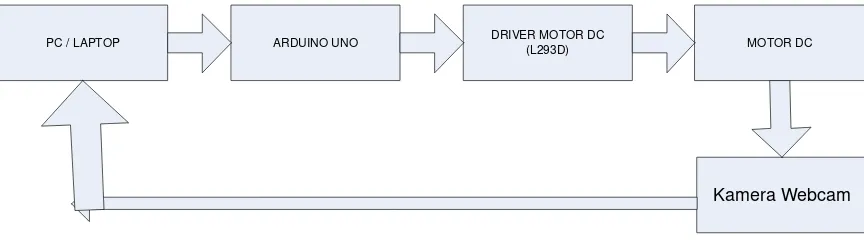
3.1 Diagram Blok Rancangan Sistem Monitoring
Dibawah ini adalah diagram blok dari rancangan sistem monitoring ruangan menggunakan kamera webcam:
PC / LAPTOP ARDUINO UNO DRIVER MOTOR DC (L293D) MOTOR DC
[image:40.595.151.583.268.389.2]Kamera Webcam
Gambar 3.1 Diagram blok rancangan sistem monitoring
3.2 Konstruksi Rancangan Alat
Gambar 3.2. Kontruksi rancangan alat
Pada gambar 3.2 ditunjukkan bahwa Motor DC pertama berfungsi untuk menggerakkan kamera ke kiri dan ke kanan (horizontal) dan motor DC kedua berfungsi untuk menggerakkan kamera ke atas dan kebawah (vertical). Sinyal pengendalian motor DC ini diatur dengan perangkat lunak ( dalam perancangan alat ini penulis menggunakan Visual Basic). Komputer Notebook ini mengirim data melalui port serial pada rangkaian elektronik arduino. Kemudian dataprogram tersebut diproses dan akan mengendalikan gerakan mekanis motor Dc.
3.2 Rangkaian Interface Notebook Terhadap KIT Arduino
KIT Arduino merupakan sebuah rangkaian minimum dari mikrokontroler ATMega328 yang dipadukan dengan rangkaian interfacing USB ke port Serial. Fitur tambahan interfacing tersebut akan memudahkan kita dalam menghubungkan mikrokontroler dengan PC melalui port USB. Pada board Arduino juga terdapat sebuah mikrokontroler ATMega328 yang digunakan
Kamera 1
Kamera 2
Motor DC (1) putar kiri kanan
sebagai pusat kendali dari alat yang dibuat. Berikut ini adalah gambar sistem/board dari modul Arduino Uno.
Gambar 3.2 KIT Arduino Uno ATmega328
3.3 Rangkaian Driver Motor DC dengan IC L293D
Gambar3.3 Rangkaian Driver motor DC dengan IC L293D
3.4 Rangkaian Power Supplay (PSA)
Gambar 3.4 Skematik Rangkaian power supplay (PSA)
Transformator yang digunakan adalah transformator CT Stepdown yang akan menurunkan tegangan 220 Volt AC menjadi 12 Volt AC. Kemudian, tegangan 12 Volt AC ini disearahkan oleh 2 buah dioda 1N5392 sehingga menjadi
12 Volt DC. Kemudian tegangan ini diratakan menggunakan kapasitor 2200 μF.
3.5 Pemrograman Perangkat Lunak pada Komputer Notebook
Berikut adalah gambar diagram alir pemrogram pada Komputer Notebook:
Inisialisasi Serial Port Mulai Tombol Up Ditekan Tombol Down Ditekan Tombol Left Ditekan Tombol Right Ditekan Tombol W Ditekan Tombol S Ditekan Tombol A Ditekan Tombol D Ditekan Serial port = “1”
Serial port = “2”
Serial port = “3”
Serial port = “4”
Serial port = “5”
Serial port = “6”
Serial port = “7”
[image:45.595.169.523.135.629.2]Serial port = “8” Tidak Tidak Tidak Tidak Tidak Tidak Tidak Tidak Ya Ya Ya Ya Ya Ya Ya Ya
Program dimulai dengan inisialisasi port komunikasi serial. Untuk menggerakkan motor-motor pada kamera 1 kita bisa menggunakan tombol tanda panah up, left, right, dan down pada keyboard Komputer Notebook.
Berikut adalah listing program pada Komputer Notebook :
Program dimulai dengan inisialisasi port komunikasi serial. Untuk menggerakkan motor-motor pada kamera 1 kita bisa menggunakan tombol tanda panah up, left, right, dan down pada keyboard PC. Untuk menggerakkan motor-motor pada kamera 2 kita bisa menggunakan tombol “W”, “S”, “A”, dan “D” pada keyboard PC kita sebagai input data serial yang akan dikirimkan dari PC ke mikrokontroler sesuai dengan data yang diperoleh.
Berikut adalah listing program pada PC : Public tanda As Integer
Private Sub Command1_Click() Dim port As Integer
port = Text1.Text
MSComm1.CommPort = port MSComm1.DTREnable = True MSComm1.RTSEnable = True MSComm1.PortOpen = True Command1.Enabled = False Text1.Locked = True
End Sub
End Sub
Private Sub Form_KeyDown(KeyCode As Integer, Shift As Integer) Select Case KeyCode
Case vbKeyUp
MSComm1.Output = "1" Case vbKeyDown
MSComm1.Output = "2" Case vbKeyLeft
MSComm1.Output = "3" Case vbKeyRight
MSComm1.Output = "4" Case vbKeyW
MSComm1.Output = "5" Case vbKeyS
MSComm1.Output = "6" Case vbKeyA
MSComm1.Output = "7" Case vbKeyD
MSComm1.Output = "8" End Select
3.6 Pemrograman Perangkat Lunak Pada Arduino
Berikut adalah diagram alir dari program alat yang telah dirancang:
Inisialisasi Pin yang Digunakan
Data Serial “1” Mulai
Cek data serial port Data Serial “2” Data Serial “3” Data Serial “4” Data Serial “5” Data Serial “6” Data Serial “7” Data Serial “8” Tidak Tidak Tidak Tidak Tidak Tidak Tidak Motor 1 Kamera 1
Searah jarum jam
Motor 1 Kamera 1 Berlawanan arah
jarum jam
Motor 2 Kamera 1 Berlawan Arah
Jarum Jam
Motor 2 Kamera 1 Searah Jarum
Jam
Motor 1 Kamera 2 Serah jarum jam
Motor 2 Kamera 2 Berlawanan Arah
Jarum Jam
Motor 1 Kamera 2 Berlawanan jarum
jam
[image:48.595.151.571.143.723.2]Motor 2 Kamera 2 Searah Jarum Jam Ya Ya Ya Ya Ya Ya Ya Ya Tidak
Program dimulai dengan inisialisasi pin-pin yang digunakan serta untuk mendeklarasikan komunikasi serial yang digunakan. Selanjutnya program akan mengecek apakah ada data dari komunikasi serial. Jika ada data serial, maka mikrokontroler akan memeriksa data tersebut. Jika data dari serial berupa karakter “1” maka mikrokontroler akan mengeluarkan logika yang akan menggerakan motor 1 pada kamera 1 untuk bergerak naik (searah jarum jam/ clock wise). Jika data serial berupa karakter “2” maka mikrokontroler akan memberikan logika yang akan menggerakan motor 1 pada kamera 1 bergerak turun (berlawanan arah jarum jam/ counter clock wise).
Jika data serial berupa karakter “3”, maka mikrokontroler akan mengeluarkan logika yang akan menggerakkan motor 2 pada kamera 1 untuk berputar kearah kiri (berlawanan arah jarum jam/ counter clock wise). Jika data serial berupa karakter “4”, maka mikrokontroler akan mengeluarkan logika yang akan menggerakan motor 2 pada kamera 1 untuk berputar ke kanan (searah jarum jam/clockwise).
Jika data serial berupa karakter “5”, maka mikrokontroler akan memberikan logika yang akan menggerakan motor 1 pada kamera 2 untuk bergerak naik (searah jarum jam/clock wise). Jika data serial berupa karakter “6”, maka mikrokontroler akan memberikan logika yang akan menggerakan motor 2 pada kamera 2 berputar kearah kiri (berlawanan arah jarum jam/ counter clock wise).
turun (berlawanan arah jarum jam/counter clock wise). Jika data serial berupa karakter “8”, maka mikrokontroler akan mengeluarkan logika yang akan menggerakkan motor 2 pada kamera 2 berputar kekanan (searah jarum jam/clock wise).
Berikut ini adalah listing program pada mikrokontroler ATMega328: int pwmab=10;
int pwmcd=5; int motas1=12; int motas2=11; int motbwh1=9; int motbwh2=8; int motasa=7; int motasb=6; int motbwha=4; int motbwhb=3; void setup(){
}
void loop(){
if ( Serial.available()>0){ int serial = Serial.read(); switch(serial){
break; } } }
void kiribwh1(){
digitalWrite(motbwh1, HIGH); digitalWrite(motbwh2, LOW); analogWrite(pwmab, 70); }
void kananbwh1(){
digitalWrite(motbwh1, LOW); digitalWrite(motbwh2, HIGH); analogWrite(pwmab, 70); }
void stopmot1(){
digitalWrite(motbwh1, HIGH); digitalWrite(motbwh2, HIGH); digitalWrite(motas1, HIGH); digitalWrite(motas2, HIGH); }
void kiribwh2(){
digitalWrite(motbwha, LOW); digitalWrite(motbwhb, HIGH); analogWrite(pwmcd, 70); }
void kananbwh2(){
analogWrite(pwmcd, 70); }
void stopmot2(){
digitalWrite(motbwha, HIGH); digitalWrite(motbwhb, HIGH); digitalWrite(motasa, HIGH); digitalWrite(motasb, HIGH); }
void atastrn1(){
digitalWrite(motas1, HIGH); digitalWrite(motas2, LOW); analogWrite(pwmab, 70); }
void atasnaek1(){
digitalWrite(motas1, LOW); digitalWrite(motas2, HIGH); analogWrite(pwmab, 70); }
void atastrn2(){
digitalWrite(motasa, LOW); digitalWrite(motasb, HIGH); analogWrite(pwmcd, 70); }
void atasnaek2(){
BAB IV
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Power Supplay (PSA)
Adapun cara untuk menguji rangkaian catu daya adalah dengan mengukur tegangan output yang dihasilkan oleh catu daya tersebut. Pada gambar 4.1 letak titik pengukuran (test point) yang dipakai untuk menguji rangkaian catu daya tersebut adalah sebagai berikut:
Gambar4.1 Pengujian rangkaian power supplay 4.1.1 Data Pengujian Rangkaian Power Supplay (PSA)
[image:55.595.162.506.317.448.2]Berdasarkan pengujian rangkaian power supplay pada gambar 4.1, maka didapat tegangan sebagai berikut:
Tabel 4.1 sumber tegangan pada rangkaian power supplay Sumber Tegangan Besar Tegangan (Volt)
PLN 220
Berdasarkan pengujian rangkaian pada gambar 4.1, maka diperoleh hasil pengukuran tegangan dari titik TP1 dan titik TP2 seperti dalam tabel dibawah ini:
Tabel 4.2 Hasil pengukuran pengujian rangkaian PSA Titik pengukuran Tegangan rata-rata (Volt)
TP1 11,7
TP2 4,9
4.1.2Analisis Pengujian Rangkaian Power Supllay (PSA)
Berdasarkan data hasil pengukuran titik TP1 dan titik TP2 pada tabel 4.2 dapat disimpulkan bahwa rangkaian ini sudah dapat beroperasi dengan baik.
Persen ralat dari pengujian rangkaian power supplay tersebut adalah sebagai berikut:
% Ralat PSA
% Ralat TPı
= 2,56 %
% Ralat TP2
4.2 Pengujian Rangkaian Driver Motor DC
[image:57.595.136.488.236.556.2]Driver motor DC seperti pada gambar 4.2 digunakan untuk mengendlikan motor DC secara kontinyu atupun dengan tehnik PWM. Untuk mengendalikan 2 buah motor DC , maka dibutuhkan 1 IC L293D.
Gambar 4.2 Pengujian rangkaian driver motor DC L293D
4.2.1 Data Pengujian Rangkaian Driver Motor DC
[image:58.595.108.520.225.338.2]Berdasarkan pengujian rangkaian pada rangkaian driver motor DC L293D, maka diperoleh hasil seperti pada table dibawah ini:
Tabel 4.3 Pengujian Rangkaian Driver Motor DC
Input A Input B Motor DC
0 0 Motor diam
1 0 Motor berputar berlawanan jarum jam
0 1 Motor berputar searah jarum jam
1 1 Motor diam
4.2.2 Analisis Pengujian Rangkaian Motor DC
Seperti diketahui tegangan keluaran dari port serial pada saat logika high (1) adalah 5 volt, sedangkan untuk mengaktifkan motor DC dibutuhkan tegangan sebesar 12 volt.
Dengan demikian penguatan tegangan yang terjadi pada rangkaian driver ini, dapat dicari dari persamaan dibawah ini:
Av
Av
Av
=
2,4 kaliDengan demikian penguatan arus yang terjadi pada transistor di rangkaian driver ini adalah:
hғє
hғє
=
5Dengan demikian data dari transistor dicarilah data dari transistor yang mempunyai nilai
hғє
minimal sebesar 5.Berikut adalah listing program untuk pengujian driver motor:
int pwmab=10; int pwmcd=5; int motas1=12; int motas2=11; int motbwh1=9; int motbwh2=8; int motasa=7; int motasb=6; int motbwha=4; int motbwhb=3; void setup(){
pinMode(motasa, OUTPUT); pinMode(motasb, OUTPUT); pinMode(motbwha, OUTPUT); pinMode(motbwhb, OUTPUT); }
Void loop(){
digitalWrite(motbwh1, HIGH); digitalWrite(motbwh2, LOW); analogWrite(pwmab, 70); delay(1000);
digitalWrite(motbwh1, LOW); digitalWrite(motbwh2, HIGH); analogWrite(pwmab, 70); delay(1000);
}
4.3 Pengujian Pemrograman Pada KIT Arduino
Pengujian Modul Arduino dilakukan dengan mengedipkan LED yang terdapat pada pin 13 pada modul ini. Proses pengedipan tersebut dilakukan melalui program yang dimasukkan pada modul ini. Jika LED pada pin tersebut berkedip sesuai dengan program, maka dapat disimpulkan bahwa modul ini dalam keadaan baik.
Berikut ini adalah listing program yang digunakan untuk mengedipkan LED pada pin 13 modul ini.
void setup() { pinMode(13, OUTPUT); }
digitalWrite(13, HIGH); // menyalakan LED di pin 13 Arduino delay(1000); // delay selama 1 detik
digitalWrite(13, LOW); // mematikan LED di pin 13 Arduino delay(1000); // delay selama 1 detik
}
Cara mengisi program dari Notebook terhadap Arduino uno:
- Sebelum mengisi program, dihubungkan Notebook dengan Arduino menggunakan kabel USB dengan posisi power supplay tidak terhubung dengan arduino atau rancangan alat dalam keadaan OFF.
- Double klik software arduino uno - Ketik program yang akan dibuat - Upload program
- Setelah program selesai di upload, maka rancangan alat di ON kan.
Salah satu contoh program untuk menguji KIT Arduino Uno adalah sebagai berikut:
Void setup(){ ; Untuk mengatur PIN output Arduino pinMode(6,OUTPUT); ; PIN 6 sebagai output
pinMode(7,OUTPUT); ; PIN 7 sebagai output }
Void loop(){ ; Untuk mengulang program
analogWrite(5,100); ; PIN 5 untuk mengatur kecepatan putaran motor sebesar 100 rpm.
digitalWrite(6,LOW); ; diberikan logika low pada PIN 6 digitalWrite(7,HIGH); ; diberikan logika high pada PIN 7 delay(1000); ; waktu tunda selama 1 detik digitalWrite(6,LOW); ; diberikan logika low pada PIN 6 digitalWrite(7,LOW); ; diberikan logika low pada PIN 7 delay(10); ; waktu tunda selama 0,1 ms }
4.4 Pengujian Monitoring
4.4.1 Data Pengujian Monitoring
Data pengujian monitoring adalah data dari pengukuran putaran motor DC vertical dan horizontal. Data pengujian monitoring secara vertical dan horizontal diperoleh berdasarkan pengukuran dengan menggunakan busur derajat.
Berikut adalah data pengujian monitoring:
[image:62.595.139.484.315.657.2]Data pengujian monitoring pada table 4.1 diperoleh berdasarkan pengukuran dengan menggunakan busur derajat.
Tabel 4.1 Data pengujian monitoring secara Horizontal kamera 1 Horizontal Arah putar motor DC Waktu (millisekon) Putaran secara teori (derajat) Putaran secara praktek (derajat)
Atas 250 7,5 6,1
500 15 14,2
750 22,5 20,2
1000 30 29,6
1500 37,5 35,9
2000 45 44,1
Bawah 250 7,5 6,5
500 15 14,6
750 22,5 21,1
1000 30 29,2
1500 37,5 36,4
2000 45 44,6
Putaran rata-rata
Data pengujian monitoring pada table 4.2 diperoleh berdasarkan pengukuran dengan menggunakan busur derajat.
Tabel 4.2 Data pengujian monitoring secara vertical kamera 1
Vertical Arah putar
motor DC
Waktu (millisekon)
Putaran secara teori (derajat)
Putaran secara praktek (derajat)
Kiri 250 17 16,5
500 34 32,4
750 51 49,2
1000 68 68,3
1500 85 83,3
2000 102 101,2
Kanan 250 17 16,3
500 34 34,6
750 51 50,2
1000 68 67,6
1500 85 84,9
2000 102 98,4
Putaran rata-rata
= 58,48 derajat/sekon
Data pengujian monitoring pada table 4.3 diperoleh berdasarkan pengukuran dengan menggunakan busur derajat.
Tabel 4 .3Data pengujian monitoring secara Horizontal kamera 2 Horizontal
Arah putar motor DC
Waktu (millisekon)
Putaran secara teori (derajat)
Putaran secara praktek (derajat)
Atas 250 7,5 6,2
500 15 14,5
750 22,5 20,2
1000 30 29,4
1500 37,5 36,2
2000 45 44,3
Bawah 250 7,5 6,5
500 15 14,8
750 22,5 20.6
1000 30 29,9
1500 37,5 36,7
2000 45 43.4
Putaran rata-rata
Data pengujian monitoring pada table 4.4 diperoleh berdasarkan pengukuran dengan menggunakan busur derajat.
Tabel 4.4 Data pengujian monitoring secara vertical kamera 2
Vertical Arah putar
motor DC
Waktu (millisekon)
Putaran secara teori (derajat)
Putaran secara praktek (derajat)
Kiri 250 17 16,1
500 34 32,5
750 51 49,1
1000 68 67.8
1500 85 83,3
2000 102 101,4
Kanan 250 17 16,2
500 34 34
750 51 50,2
1000 68 67,6
1500 85 84,9
2000 102 99,2
Putaran rata-rata
4.4.2 Analisis Pengujian Monitoring
Dari data pengukuran monitoring pada table 4.1, 4.2, 4.3,dan table 4.4 diatas data teori dan praktek berbeda, hal ini dapat terjadi karena factor gesekan dari peralatan dan kekurang efektifan cara sudut pandang dalam pengkuran.
Putaran vertikal kamera 1
o % Ralat Atas
o % Ralat Bawah
= 3,2%
Putaran Horizontal kamera 1
o % Ralat Kiri
= 1,41%
o % Ralat Kanan
Putaran vertikal kamera 2
o % Ralat Atas
o % Ralat Bawah
= 4%
Putaran Horizontal kamera 2
o % Ralat Kiri
= 1,93%
o % Ralat Kanan
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari perancangan dan pengujian yang telah penulis laksanakan dapat disimpulkan :
1. Perancangan monitoring menggunakan kamera webcam sudah sesuaidengan rancangan.
2. Bahasa pemrograman Visual Basic digunakan sebagai pemogram sistem monitoring yang dikendalikan melalui computer notebook.
3. Berdasarkan data pengukuran dan pengujian, maka rancangan alat ini telah bekerja (beroperasi) dengan baik, dengan ralat 4,6 % untuk putaran vertikal atas, 3,2 % untuk putaran vertikal bawah dan 1,41 % untuk putaran horijontal kiri, 1,4 % untuk putaran horijontal kanan.
4. Berdasarkan data pengujian rancangan alat secara keeluruhan, maka didapat rata-rata putaran motor DC secara vertikal sebesar 25,01 derajat dengan lama waktu 1000 millisekon dan rata-rata putaran motor DC secara horizontal sebesar 58,48 derajat per sekon.
5.2 Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu:
1. Agar dilakukan peningkatan kemampuan pada alat ini, sehingga semakin cerdas dengan mengkombinasikan dengan komponen yang lain, sehingga sistem kerjanya akan lebih baik lagi.
2. Dimasa yang akan datang, agar alat ini dapat ditingkatkan dan di program, sehingga webcam boleh bekerja ketika ada benda yang bergerak diruangan tersebut dan boleh dipantau menggunakan Handphone secara Wireless. 3. Perlu dilakukan pemrograman interfacing antara modul arduino dan motor
DC , sehingga perputaran motor DC akan lebih baik lagi.
DAFTAR PUSTAKA
Andi Nalwan,Paulus,’Panduan Praktis Teknik Antarmuka dan pemrograman’
Elektronika,Penerbit: PT.Elex Media Komputindo,Jakarta ,2003
Agfianto,’Teknik Antarmuka Komputer: Konsep dan Aplikasi’, Edisi Pertama,
Penerbit: Graha Ilmu, Yogyakarta,2002
Bernard Grob, ‘Prinsip-Prinsip Elektronika’, terjemahan Pakpahan,Sahat,
Penerbit: Erlangga,1991.
Eko Putra,Afgianto,’Tehnik Antar Muka Komputer, Konsep dan Aplikasi’, Penerbit: Graha Ilmu ,Yogyakarta,2002
Link,Wolfgeng,’Pengukuran,Pengendalian dan Pengaturan dengan PC’, Penerbit:PT.Elex Media Komputindo,Jakarta,1999
Malvino,Abert Paul,’Prinsip-Prinsip Elektronika’, Jilid 1 & 2, Edisi Pertama,
Penerbit: Salemba Teknika, Jakarta, 2003