RANCANG ROBOT PENYORTIR BENDA BERDASARKAN (16
WARNA) BERBASIS MIKROKONTROLER
SKRIPSI
LYRI MARTIN SIMORANGKIR
080801038
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
RANCANG ROBOT PENYORTIR BENDA BERDASARKAN (16 WARNA) BERBASIS MIKROKONTROLER
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
LYRI MARTIN SIMORANGKIR 080801038
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : RANCANG ROBOT PENYORTIR BENDA
BERDASARKAN (16 WARNA) BERBASIS MIKROKONTROLER
Kategori : SKRIPSI
Nama : LYRI MARTIN SIMORANGKIR
NIM : 080801038
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 2 April 2013
Komisi Pembimbing : Diketahui
Departemen Fisika FMIPA USU Pembimbing
Ketua,
PERNYATAAN
RANCANG ROBOT PENYORTIR BENDA BERDASARKAN (16 WARNA) BERBASIS MIKROKONTROLER
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, April 2013
PENGHARGAAN
Terpuji dan agunglah namaMuTuhan Yesus Kristus buat segala apa yang diberikan untuk penulis. Kekuatan, kesehatan, petunjuk, hikmat dan kebijaksanaan, waktu, dimana selama proses pengerjaan tugas akhir ini rintangan yang dihadapi oleh penulis dapat diselesaikan. Bukan karena kekuatan dan kemampuan penulis tetapi karena berkat, kasih dan karunia Tuhan sajalah sehingga penulis dapat menyelesaikan tugas akhir ini, dalam waktu yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada orang – orang yang menjadi bagian hidup penulis, Terima kasih yang sebesar – besarnya kepada
1. Bapak Dr. Marhaposan Situmorang selaku dosen pembimbing penulis yang telah banyak meluangkan waktu untuk memberikan bimbingan, motivasi dan ide/masukan dalam menyempurnakan skripsi menjadi lebih baik.
2. Bapak Dr. Marhaposan Situmorang selaku ketua Jurusan, Bapak Drs. Syahrul Humaidi, M.Sc selaku seketaris, Bapak Dekan FMIPA USU, beserta seluruh Civitas Akademika FMIPA USU.
3. Bapak Dr. Kerista Tarigan M.Eng.Sc yang telah banyak memberikan penulis kesempatan melakukan penelitian di laboratorium elektronika dasar FMIPA. 4. Ibu saya yang tercinta Dinar Tampubolon yang telah memberikan kasih
sayang, motivasi, materi, kerja kerasnya, serta mendoakan penulis.
5. Kelompok kecil The Young Leader (Albert Saragih, Hiras Sitanggang, Perdana O. Manik) atas motivasi dan dukungan doanya.
6. Bang Mula Sigiro atas begitu banyak motivasi dan dukungan doanya
7. Teman-teman asisten Lab. Elektronika Dasar (Bang Nonggor, Ervina Tambunan, Emy Alemita Tarigan, Wiharja Ginting, Baginda Sitorus, Juli Sitorus, Lasmini Sihombing, Maisarah)
8. Teman-teman seperjuangan stambuk 2008 (Bora Sihombing, Theresia, Yosephin, Laek dan pal Kost KCC (Asman Marpaung, Triandes Sinaga Donal Edison Sijabat Bheng An, Indra Tarigan, Mangara Sitanggang, Zulkarnain, Nyta dan teman-teman 2008 yang lain ) yang telah memberi semangat dan dukungan untuk menyelesaikan skripsi ini.
9. Senior dan Junior Jurusan Fisika FMIPA USU
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna, untuk itu penulis mengharapkan saran dan kritik yang membangun demi penyempurnaan isi dan analisa yang disajikan.Akhir kata, semoga tulisan ini bermanfaat bagi pembaca.
Medan, April 2013
ABSTRAK
Rancang Robot Penyortir Benda Berdasarkan (16 Warna) Berbasis Mikrokontroler
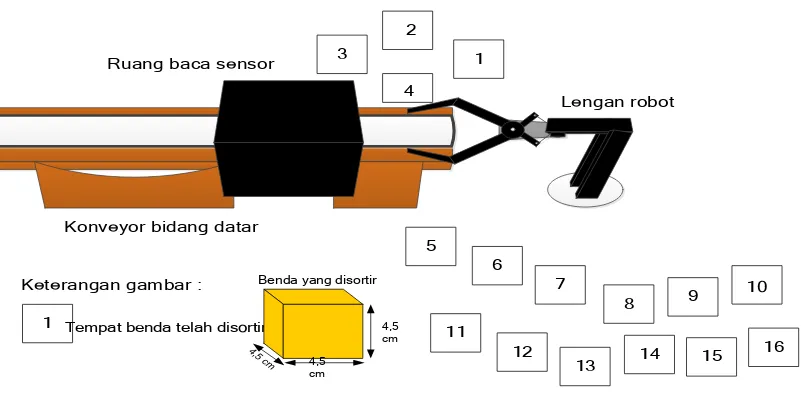
Telah dirancang robot penyortir benda berbasis mikrokontroler ATMega8535.Robot ini berfungsi sebagai pemindah benda ringan berdasarkan warna secara otomatis. Secara keseluruhan sistem otomatis ini terdiri dari robot lengan, konveyor statis bidang datar sebagai tempat benda/obyek, dan masing-masing tempat untuk ke-16 warna yang akan disortir. Secara garis besar sistem ini terdiri dari 4 (empat) buah motor servo sebagai aktuator lengan, 1 (satu) buah motor servo sebagai penggerak konyeyor, DT-Sense Color sebagai sensor warna, Infra Red, Infra Red Adjustable, dan mikrokontroler. Pada sistem ini terdapat ruang pembacaan warna yang di dalamnya terdapat Infra Red untuk memberhentikan gerak motor konveyor ketika sensor mengenai benda sehingga posisi benda tepat di bawah sensor warna dan DT-Sense Color Sensor berfungsi sebagai pembaca 16 warna RGB benda. Untuk pertama sekali sensor warna yang digunakan dilakukan proses pengkalibrasian warna untuk disimpan pada EEPROM mikrokontroler, lalu dilakukan pembacaan warna untuk mendapatkan warna yang akan dibaca yang kemudian ditampilkan pada LCD. Untuk penentuan posisi peletakan benda pada tempat berdasarkan warnanya digunakan metode pemetaan arena. Dengan demikian proses keseluruhan kerja sistem dapat bekerja dengan baik sesuai yang diharapkan.
ABSTRACT
The Design Robot to Sorting Objects By (Sixteen Colors) Based On Microcontroler
Have designed a microcontroller-based robot ATMega8535 sorter object.This robot serves as a transfer light objects by color automatically. Overall automated system consists of robotic arms, conveyor static plane as the object / objects, and each point to all 16 colors that will be sorted. Broadly speaking, this system consists of 4 (four) pieces of the servo motor as an actuator arm, 1 (one) servo motor as the driving konyeyor, DT-Sense Color as color sensors, Infra Red, Infra Red Adjustable, and microcontrollers.In this system there is a reading of the color space in which there is Infra Red to stop the conveyor when the motor motion sensor so that the position of objects on the body just below the color sensor and the DT-Sense Color Sensor RGB color serves as a reader object. For the first time color sensors that are used to do the color calibration is stored in the EEPROM microcontroller and color readings done to get the color that will be read and then displayed on the LCD. For positioning objects laying on the color space used by the mapping method arena. Thus the overall performance of the system can work well as expected.
DAFTAR ISI
Bab II Tinjauan Pustaka
2.1 Teori Warna 6
2.1.1Pengertian Warna 8
2.2 Mikrokontroler AVR 10
2.2.1 Arsitektur ATMega8535 11
2.5.2 fotodiode 30 2.5.3 Switch Sensor DFRobot Adjustable Infrared 31
2.6 LCD 16 X 2 32
3.1.3 Perancangan keseluruhan rangkaian, konveyor
dan lengan robot 37
3.1.3.1 Perancangan konveyor 38 3.1.3.2 Perancangan lengan robot 38
3.1.4 Sensor warna 40
3.1.5 Rangkaian Mikrokontroler ATMega8535 41
3.1.6 Rangkaian Power Supply (PSA) 43
3.1.7 Perancangan Rangkaian Sensor Kedekatan 43 3.1.8 Rangkaian LCD (Liquid Crystal Display) 46 3.2 Perancangan diagram alir program perangkat lunak 47
3.2.1 Diagram Alir program utama 47
3.2.1 Diagram alir pembacaan warna oleh sensor 49 Bab IV Pengujian Alat dan Pembahasan
4.1 Pengujian Minimum sistem 51
4.1.1 Pengujian Sistem Mikrokontroler AVR ATMega8535 51
4.1.2 Pengujian LCD 52
4.1.3 Pengujian Motor Servo 53
4.1.4 Pengujian Sensor 58
4.2 Pembahasan/ Hasil Pengukuran alat 60
4.2.1 Hasil Pembacaan Data Sensor 60
4.2.2 Pengujian Keseluruhan Sistem 62
4.2.3 Analisa Perhitungan proses pembacaan data dan ketelitian 63 4.2.3.1 Analisa perhitungan pembacaan data warna 63 4.2.3.2 Analisa ketelitian alat 64 Bab V Kesimpulan dan Saran
DAFTAR TABEL
Halaman
Tabel 2.1 Konfigurasi Data AVR ATMega8535 17
Tabel 2.2Terminologi TWI 20
Tabel 2.3 Fungsi Terminal 23
Tabel 2.4 Fungsi Jumper Pull-UP 23
Tabel 2.5 Alamat Jumper PIN 24
Tabel 3.1 Kondisi masukan terhadap logika keluaran 46
Tabel 4.1 Pengujian mikrokontroler 52
Tabel 4.2 Hasil Pengujian LCD 53
Tabel 4.3 Input Pulse Width serta posisi servo
55Tabel 4.4 Data warna (Red, Green, Blue) kalibrasi sensor 60
Tabel 4.5 Pembacaan warna benda pada mode normal 61 Tabel 4.6 Waktu yang dibutuhkan lengan untuk memindahkan benda
(dalam detik) 63
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram Percobaan Maxwell 7
Gambar 2.2 Arsitektur Mikrokontroler ATMega8535 12
Gambar 2.3 Konfigurasi PIN 13
Gambar 2.4 Sistem Clock 15
Gambar 2.5 Memori Program ATMega8535 18
Gambar 2.6 Tata letak Komponen DT Sesne Color Sensor 22 Gambar 2.7 Contoh Paket Data Digital Yang Dikirim 25
Gambar 3.1Diagram Blok Rangkaian Sistem 34
Gambar 3.2 Sistem Kontrol Robot Loop Tertutup 36
Gambar 3.3 Perancangan Sistem Pemetaan 37
Gambar 3.4 Konveyor Statis Bidang Datar 38 Gambar 3.10 Rangkaian skematik konektor yang dihubungkan dari LCD
Ke mikrokontroler 47
Gambar 3.11 Diagram alir program utama 48
Gambar 3.12 Diagram alir program pembacaan warna oleh sensor 50
Gambar 4.1 Tampilan pada LCD 53
Gambar 4.2 Grafik pembacaan data warna kalibrasi oleh sensor 61
DAFTAR LAMPIRAN
Halaman
LampiranA Program di mikrokontroler ATMega8535 69
LampiranB Rangkaian Lengkap 80
Lampiran C Tabel Kode warna R,G,B secara Teori 81
ABSTRAK
Rancang Robot Penyortir Benda Berdasarkan (16 Warna) Berbasis Mikrokontroler
Telah dirancang robot penyortir benda berbasis mikrokontroler ATMega8535.Robot ini berfungsi sebagai pemindah benda ringan berdasarkan warna secara otomatis. Secara keseluruhan sistem otomatis ini terdiri dari robot lengan, konveyor statis bidang datar sebagai tempat benda/obyek, dan masing-masing tempat untuk ke-16 warna yang akan disortir. Secara garis besar sistem ini terdiri dari 4 (empat) buah motor servo sebagai aktuator lengan, 1 (satu) buah motor servo sebagai penggerak konyeyor, DT-Sense Color sebagai sensor warna, Infra Red, Infra Red Adjustable, dan mikrokontroler. Pada sistem ini terdapat ruang pembacaan warna yang di dalamnya terdapat Infra Red untuk memberhentikan gerak motor konveyor ketika sensor mengenai benda sehingga posisi benda tepat di bawah sensor warna dan DT-Sense Color Sensor berfungsi sebagai pembaca 16 warna RGB benda. Untuk pertama sekali sensor warna yang digunakan dilakukan proses pengkalibrasian warna untuk disimpan pada EEPROM mikrokontroler, lalu dilakukan pembacaan warna untuk mendapatkan warna yang akan dibaca yang kemudian ditampilkan pada LCD. Untuk penentuan posisi peletakan benda pada tempat berdasarkan warnanya digunakan metode pemetaan arena. Dengan demikian proses keseluruhan kerja sistem dapat bekerja dengan baik sesuai yang diharapkan.
ABSTRACT
The Design Robot to Sorting Objects By (Sixteen Colors) Based On Microcontroler
Have designed a microcontroller-based robot ATMega8535 sorter object.This robot serves as a transfer light objects by color automatically. Overall automated system consists of robotic arms, conveyor static plane as the object / objects, and each point to all 16 colors that will be sorted. Broadly speaking, this system consists of 4 (four) pieces of the servo motor as an actuator arm, 1 (one) servo motor as the driving konyeyor, DT-Sense Color as color sensors, Infra Red, Infra Red Adjustable, and microcontrollers.In this system there is a reading of the color space in which there is Infra Red to stop the conveyor when the motor motion sensor so that the position of objects on the body just below the color sensor and the DT-Sense Color Sensor RGB color serves as a reader object. For the first time color sensors that are used to do the color calibration is stored in the EEPROM microcontroller and color readings done to get the color that will be read and then displayed on the LCD. For positioning objects laying on the color space used by the mapping method arena. Thus the overall performance of the system can work well as expected.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pada perkembangan teknologi khususnya dunia industri semakin pesat sekarang ini menuntut adanya perkembangan dalam hal peningkatan efisiensi produksi. Kebutuhan manusia terhadap peralatan yang cerdas dan dapat bekerja secara otomatis semakin meningkat, sehingga peralatan-peralatan otomatis ini sedikit demi sedikit mulai menggantikan peralatan manual. Selain sistem kerjanya yang sama, kecepatan, ketepatan, serta kuantitas menjadi suatu hal yang wajib dipenuhi dalam proses produksi.
Awalnya pemilihan produk berdasarkan wananya dilakukan oleh tangan atau bantuan manusia. Namun seiring dengan perkembangan teknologi, tugas manusia ini sudah dapat digantian oleh alat bantu tertentu yang dapat bekerja secara otomatis misalnya, memisahkan warna-warna tersebut. Alat ini dilengkapi dengan sensor yang dapat membedakan warna, kemudian mengelompokkan benda-benda tersebut berdasarkan warnanya.
Untuk itu penulis mencoba merancang robot lengan yang akan digunakan untuk memindahkan benda secara otomatis menggunakan sensor warna berbasis mikrokontroler AVR ATMega pada suatu tempat tertentu.
1.2 Rumusan Masalah
Dalam dunia industri penggunaan teknologi sudah semakin berkembang.Namun permasalahan yang sering terjadi tingkat efisiensi baik dari segi kecepatan waktu, kwantitas yang besar diharapkan, ketepatan kerap sekali sangat diperlukan didalam dunia perindustrian. Oleh karena itu, yang menjadi permasalahan sekarang adalah bagaimana cara agar efisiensi ini dapat tercapai sehingga terpenuhi. Berdasarkan rumusan masalah ini, maka penulis merancang sebuah Rancangan Robot Penyortir benda berdasarkan warna berbasis mikrokontroler.
1.3 Tujuan Penelitian
Adapun tujuan dari perancangan alat ini, antara lain:
1. Memanfaatkan sensor warna yang dapat mengidentifikasi warna benda.
2. Memanfaatkan mikrokontroler AVR sebagai alat pengolah data yang diberikan oleh sensor warna.
3. Memanfaatkan mikrokontroler AVR sebagai alat pengatur perangkat keras mekanik.
4. Merancang perangkat keras mekanik yang dapat mengelompokkan benda berdasarkan warna benda tersebut.
1.4 Manfaat Penelitian
2. Adanya visualisasi yang akan mengenali warna benda yang akan memandu robot untuk memindahkan benda secara otomatis.
1.5 Pembatasan Masalah
Dikarenakan banyaknya pembahasan pada sistem kendali otomatis lengan robot ini, maka penulis membatasi masalah pada:
1. Penulis merancang sistem pergerakan lengan menggunakan mikrokontroler ATMega8535 serta lcd sebagai tampilan.
2. Penggunaan motor servo sebagai lengan robot pemindah benda. 3. Penggunaan motor servo sebagai penggerak konveyor mekanik benda. 4. Benda yang akan disortir berbentuk kotak yang bermassa ringan. 5. Bahasa pemograman yang digunakan adalah bahasa C.
6. Sensor yang digunakan adalah DT-SENSE COLOR SENSOR
1.6 Sistematika Penulisan
Sistematika penulisan tugas akhir ini terbagi menjadi beberapa bagian utama yaitu:
BAB I PENDAHULUAN
Bab ini berisikan pendahuluan yang menjelaskan mengenai latar belakang perumusan masalah, tujuan, batasan masalah, dan sistematika penulisan tugas akhir.
BAB II LANDASAN TEORI
BAB III PERANCANGAN ALAT DAN PROGRAM
Bab ini membahas tentang perancangan dan pembuatan alat yang meliputi perancangan rangkaian-rangkaian elektronik. Pada bab ini juga dibahas flowchart perancangan sistem pengendali peralatan elektronik.
BAB IV PENGUJIAN ALAT DAN PROGRAM
Bab ini berisikan analisa rangkaian dan sistim kerja alat, analisa data pengujian alat serta program yang telah dibuat secara keseluruhan.
BAB V KESIMPULAN DAN SARAN
BAB II
TINJAUAN PUSTAKA
2.1 Teori Warna
2.1.1 Pengertian warna
warna.Teori dan pengenalan warna telah banyak dipaparkan oleh para ahli, diantaranya sebagai berikut:
a. Teori Newton (1642-1727)
Dalam bukunya “Optics”(1704), ia mengungkapkan bahwa warna itu ada dalam cahaya. Hanya cahaya satu- satunya sumber warna bagi setiap benda.Asumsi yang dikemukan oleh Newton didasarkan pada penemuannya dalam sebuah eksperimen.Di dalam sebuah ruangan gelap, seberkas cahaya putih matahari diloloskan lewat lubang kecil dan menerpa sebuah prisma. Ternyata cahaya putih matahari yang bagi kita tidak tampak berwarna, oleh prisma tersebut dipecahkan menjadi susunan cahaya berwarna yang tampak di mata sebagai cahaya merah, jingga, kuning, hijau, biru, nila, dan ungu, yang kemudian dikenal sebagai susunan spektrum dalam cahaya. Jika spektrum cahaya tersebut dikumpulkan dan diloloskan kembali melalui sebuah prisma, cahaya tersebut kembali menjadi cahaya putih.Jadi, cahaya putih (seperti cahaya matahari) sesungguhnya merupakan gabungan cahaya berwarna dalam spektrum.
Newton kemudian menyimpulkan bahwa benda- benda sama sekali tidak berwarna tanpa ada cahaya yang menyentuhnya. Sebuah benda tampak hijau karena fotoreseptor (penangkap/penerima cahaya) pada mata manusia menangkap cahaya hijau yang dipantulkan oleh benda tersebut.Cahaya adalah satu-satunya sumber warna dan benda-benda yang tampak berwarna semuanya hanyalah pemantul, penyerap dan penerus warna-warna dalam cahaya.
b. Eksperimen James Clerck Maxwell (1855-1861)
tinta/cat/bahan pewarna. Penumpukkan (pencampuran) cahaya hijau dan cahaya merah, misalnya menghasilkan warna kuning.
Hasil experimen Maxwell menyimpulkan bahwa warna hijau, merah dan biru merupakan warna- warna primer (utama) dalam pencampuran warna cahaya.Warna primer adalah warna- warna yang tidak dapat dihasilkan lewat pencampuran warna apapun.Melalui warna- warna primer cahaya ini (biru, hijau, dan merah) semua warna cahaya dapat dibentuk dan diciptakan. Jika ketiga warna cahaya primer ini dalam intensitas maksimum digabungkan, berdasarkan eksperimen 3 proyektor yang didemonstrasikan Maxwell, maka ditunjukkan sebagai berikut:
(a) Warna Primer Aditif (b) Warna Primer Substraktif Gambar 2.1 Diagram Percobaan Maxwell
Eksperimen Maxwell merupakan model atau tiruan yang bagus sekali untuk memudahkan pemahaman kita tentang bagaimana reseptor mata menangkap cahaya sehingga menimbulkan penglihatan berwarna di otak.
merah. Cara menghasilkan warna cahaya baru dengan mencampurkan 2 atau lebih warna cahaya disebut “pencampuran warna secara aditif” (additive= penambahan). Warna- warna utama cahaya (merah, hijau, biru) selanjutnya kemudian dikenal juga sebagai warna- warna utama aditif (additive primaries).Pencampuran warna secara aditif hanya dipergunakan dalam pencampuran warna cahaya.
c. Menurut Adrian Ford
Teori tri-chromatic menjelaskan cara tiga lampu terpisah , merah, hijau dan biru, dapat mencocokkan setiap warna terlihat - berdasarkan pada penggunaan mata dari tiga sensor sensitif warna. Ini adalah dasardi mana fotografi dan pencetakan beroperasi, menggunakan tiga pewarna yang berbeda untuk mereproduksi warna dalam sebuah peristiwa. Ini juga merupakan cara dimana kebanyakan komputer beroperasi, menggunakan tigaparameter untuk menentukan warna.
Sebuah ruang warna adalah metode dimana kita dapat menentukan, membuat dan memvisualisasikan warna. Sebagai manusia, ita dapat mendefinisikan warna dengan atribut kecerahan, warna dan colourfulness. Sebuah komputer mungkin menggambarkan warna menggunakan jumlah merah, hijau dan biru emisi fosfor yang diperlukan untuk mencocokan sebuah warna.Sebuah percetakan dapat menghasilkan warna tertentu dalam hal reflektansi dan Absorbansi cyan, magenta, kuning dan tinta hitam pada kertas cetak.
Warna yang demikian biasanya ditentukan dengan menggunakan tiga koordinat, atau parameter.Parameter menggambarkan posisi warna dalam ruang warna yang digunakan. Mereka tidak memberi tahu kita apa warna, itu tergantung pada apa ruang warna yang digunakan. Sebuah analogi ini adalah bahwa saya bisa memberitahu Anda di mana saya tinggal dengan memberikan arah dari lokal garasi, arah itu hanya berarti semuanya jika Anda mengetahui lokasi garasi sebelum bergerak. Jika Anda tidak tahu di mana garasi ,maka petunjuk tidaklah berarti.
gambar.RGB mudah untuk menerapkan tetapi non inear dengan persepsi visual. Itu adalah perangkat tergantung dan spesifikasi dari warna adalah semi intuitif. RGB adalah sangat umum, yang digunakan di hampir setiap sistem komputer serta televisi, video dll.
d. Hukum Grassman mengenai campuran aditif warna .
Setiap warna ( sumber C ) dapat dicocokkan dengan kombinasi linear dari tiga warna lain ( terutama misalnya RGB ) , asalkan tidak ada dari ketiga tersebut dapat dicocokkan oleh kombinasi dari dua lainnya .Ini merupakan dasar untuk kolorimetri dan hukum pertama Grassman tentang campuran warna . Jadi warna C dapat dicocokkan oleh Rc unit merah , unit Gc unit hijau dan Bc unit biru . Unit dapat diukur dalam bentuk apapun yang mengkuantifikasi kekuatan cahaya .
C = Rc(R) + Gc(G) + Bc(B) (2.1)
Ruang warna Komputer RGB adalah ruang warna yang dihasilkan pada layar (atau serupa) CRT ketika nilai pixel diterapkan ke kartu grafis.Ruang RGB dapat divisualisasikan sebagai kubus dengan sumbu tiga yang sesuai dengan merah, hijau dan biru. Sudut bawah, ketika merah = hijau = biru = 0 adalah hitam, sedangkan berlawanan atas pojok, di mana merah = hijau = biru = 255 (untuk 8 bit per saluran sistem tampilan), putih. RGB sering digunakan dalam aplikasi komputer terbesar karena transformasi tidak diperlukan untuk menampilkan informasi pada layar.Untuk alasan ini, umumnya dasar ruang warna untuk sebagian besar aplikasi.
2.2 Mikrokontroler AVR
Mikrokontroler dapat bekerja dengan kendali suatu program yang kita buat sendiri. Program tersebut akan berinteraksi dengan arsitektur perangkat keras yang sudah fix di dalam chip. Mikrokontroler keluarga AVR secara umum dapat dibagi menjadi 6 kelompok, yaitu:
b. Keluarga AT90Sxx; merupakan mikrokonroler yang pertama kali dibuat oleh Atmel Corp.
c. Keluarga ATmega; merupakan pengembangan mikrokontroler AT90Sxx dengan fitur yang lebih banyak.
d. Keluarga AT86RFxx; merupakan mikrokontroler berorientasi desain minimal. e. Keluarga AT90USBxx; merupakan mikrokontroler yang berorientasi
pemrograman USB.
f. Keluarga AVR 32 bit contohnya AP7000, UC3Axxxx, UC3Bxxxx, UC3Lxx, dsb; merupakan mikrokontroler dengan register dan instruksi dengan panjang 32 bit.
Secara historis, mikrokontroler seri AVR pertama kali diperkenalkan ke pasaran sekitar tahun 1997 oleh perusahaan Atmel, yaitu sebuah perusahaan yang sangat terkenal dengan produk mikrokontroler seri AT89S51/52-nya yang samapai sekarang masih banyak digunakan di lapangan. Mikrokontroler AT89S51/52 masih mempertahankan arsitektur dan set instruksi dasar mikrokontroler 8031 dari perusahaan INTEL. Mikrokontroler AVR diklaim memiliki arsistektur dan set instruksi yang benar-benar baru dan berbeda dengan arsitektur mikrokontroler yang sebelumnya yang diproduksi oleh perusahaan tersebut.
AVR merupakan mikrokontroler dengan arsitektur RISC (Reduced Instruction Set Computer) dengan lebar bus data 8 bit. Frekuensi kerja mikrokontroler AVR ini pada dasarnya sama dengan frekuensi osilator sehingga hal tersebut dapat menyebabkan kecepatan kerja AVR untuk frekuensi osilator yang dama akan dua belas kali lebih cepat dibandingkan dengan mikrokontroler keluarga AT89S51/52.
2.2.1 Arsitektur ATMega 8535
Mikrokontroler ATmega8535 memiliki fitur-fitur utama, seperti berikut. 1. Saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C, dan Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga unit Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kbytes dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
Mikrokontroler AVR ATMega8535 merupakan mikrokontroler produksi Atmel dengan 8 KByte In-System Programmable-Flash, 512 Byte EEPROM dan 512 Bytes Internal SRAM.AVR ATMega8535 memiliki seluruh fitur yang dimiliki AT90S8535.Selain itu, konfigurasi pin AVR ATMega8535 juga kompatibel dengan AT90S8535.
Diagram blok arsitektur ATmega8535 ditunjukkan oleh Gambar 2.3. Terdapat sebuah inti prosesor (processor core) yaitu Central Processing Unit, di mana terjadi proses pengumpanan instruksi (fetching) dan komputasi data. Seluruh register umum sebanyak 32 buah terhubung langsung dengan unit ALU (Arithmatic and Logic Unit). Tedapat empat buah port masing-masing delapan bit dapat difungsikan sebagai masukan maupun keluaran.
Media penyimpan program berupa Flash Memory, sedangkan penympan data berupa SRAM (Static Ramdom Access Memory) dan EEPROM (Electrical Erasable Programmable Read Only Memory).Untuk komunikasi data tersedia fasilitas SPI
Di samping itu terdapat fitur tambahan, antara lain AC (Analog Comparator),
8 kanal 10-bit ADC (Analog to Digital Converter), 3 buah Timer/Counter, WDT
(Watchdog Timer), manajemen penghematan daya (Sleep Mode), serta osilator internal 8 MHz. Seluruh fitur terhubung ke bus 8 bit. Unit interupsi menyediakan sumber interupsi hingga 21 macam. Sebuah stack pointer selebar 16 bit dapat digunakan untuk menyimpan data sementara saat interupsi.
Gambar 2.2 Arsitektur Mikrokontroler ATmega8535
Keluarga AVR dapat mengeksekusi instruksi dengan cepat karena menggunakan teknik “memegang sambil mengerjakan” (fetch during execution). Dalam satu siklus clock, terdapat dua register independen yang dapat diakses oleh satu instruksi.
2.2.2 Konfigurasi PIN
Secara umum deskripsi mikrokontroler ATMega 8535 adalah sebagai berikut:
Gambar 2.3 Konfigurasi pin ATMega 8535
VCC (power supply)
GND (ground)
Port A (PA7..PA0)
Port A berfungsi sebagai input analog pada A/D Konverter. Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah, jika A/DKonverter tidak digunakan. Pin - pin Port dapat menyediakanresistor internal pull-up (yang dipilih untuk masing-masing bit).Port Aoutput buffer mempunyai karakteristik gerakan simetrisdengan keduanya
dan secara eksternal ditarikrendah, pin – pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan. Pin Port A adalah tri-stated manakalasuatu kondisi reset menjadi aktif, sekalipun waktu habis.
Port B (PB7..PB0)
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port B output buffermempunyai karakteristik gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai input, pin port B yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullupdiaktifkan. Pin Port B adalah tri-stated manakala suatu kondisireset menjadi aktif, sekalipun waktu habis.
Port C (PC7..PC0)
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port C output buffermempunyai karakteristik gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai input, pin port C yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullupdiaktifkan. Pin Port C adalah tri-stated manakala suatu kondisireset menjadi aktif, sekalipun waktu habis.
Port D (PD7..PD0)
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up (yang dipilih untuk beberapa bit). Port D output buffermempunyai karakteristik gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai input, pin port D yangsecara eksternal ditarik rendah akan arus sumber jika resistor pullupdiaktifkan. Pin Port D adalah tri-stated manakala suatu kondisireset menjadi aktif, sekalipun waktu habis.
RESET (Reset input)
XTAL2 (Output Oscillator) AVCC adalah pin penyedia tegangan untuk port A dan A/D Konverter
AREF adalah pin referensi analog untuk A/D konverter.
2.2.3 Stack Pointer
Stack pointer merupakan suatu bagian dari AVR yang berguna untuk menyimpan data sementara, variabel lokal, dan alamat kembali dari suatu interupsi ataupun subrutin. Stack pointer diwujudkan sebagai dua unit register, yaitu SPH dan SPL.
Saat awal, SPH dan SPL akan bernilai 0, sehingga perlu diinisialisasi terlebih dahulu. SPH merupakan byte atas (MSB), sedangkan SPL merupakan byte bawah (LSB).Hal ini hanya berlaku untuk AVR dengan kapasitas SRAM lebih dari 256 byte.Bila tidak, maka SPH tidak didefinisikan dan tidak dapat digunakan.
2.2.4 Sistem Clock
Mikrokontroler, mempunyai sistem pewaktuan CPU, 12 siklus clock. Artinya setiap 12 siklus yang dihasilkan oleh ceramic resonator maka akan menghasilkan satu siklus mesin. Nilai ini yang akan menjadi acuan waktu operasi CPU. Untuk mendesain sistem mikrokontroler kita memerlukan sistem clock, sistem ini bisa di bangun dari clock eksternal maupun clock internal. Untuk clock internal, kita tinggal memasang komponen seperti di bawah ini:
2.2.5Organisasi memori AVR ATMega8535
AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah.Sebagai tambahan, ATmega8535memiliki fitur suatu EEPROM Memori untuk penyimpanan data.Semuatiga ruang memori adalah reguler dan linier.
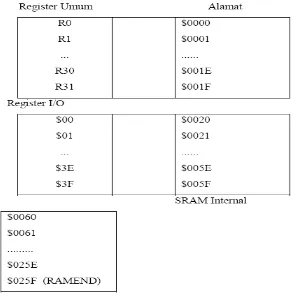
A. Memori Data
Memori data terbagi menjadi 3 bagian, yaitu 32 register umum,64 buah register I/O,dan 512 byte SRAM Internal.Register keperluan umum menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register khusus untuk menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register,timer/counter, fungsi – fungsi I/O, dan sebagainya. Register khusus alamat memori secara lengkap dapat dilihat pada Tabel 2.1. Alamat memori berikurnya digunakan untuk SRAM 512 byte, yaitu pada lokasi$60 sampai dengan $25F. Konfigurasi memori data ditunjukkan pada
Tabel 2.1 Konfigurasi Data AVR AT Mega 8535
B. Memori Program
Gambar 2.5Memori Program AT Mega 8535
2.2.6 EEPROM
Dalam mikrokontroler AVR data dapat ditempatkan pada tiga macam memori yaitu memori flash, SRAM, dan EEPROM (Electrically Erasable Programmable Read Only Memory).EEPROM adalah salah satu memori untuk menyimpan data internal mikrokontroler yang sifatnya non-volatile. Artinya data tidak akan hilang walaupun catu daya mikrokontroler mati. Biasanya memori EEPROM diaplikasikan misalnya untuk penyimpanan tabel-tabel data, atau konstanta, penyimpanan password, dan sebagainya.
ATmega8535 mempunyai memori EEPROM 512 byte. EEPROM ini disusun sebagai ruang data yang terpisah dengan yang lain, dimana byte tunggal dapat dibaca dan ditulis. EEPROM memiliki ketahanan sedikitnya 100.000 siklus tulis/hapus.
EEPROM diakses melalui register-register akses EEPROM, yaitu: - EEPROM Address Register (EEAR)
- EEPROM Data Register (EEDR) - EEPROM Control Register (EECR)
register ganda) digunakan untuk meng-set alamat EEPROM ke mana data akan ditulisi atau dari mana data akan dibaca. EEAR adalah sebuah register baca/tulis yaitu register yang dapat dibaca untuk melihat alamat apa yang telah di-set.
EEDR adalah register data EEPROM dan merupakan register baca/tulis. Bila anda ingin menulis data ke EEPROM, anda me-load data yang diperlukan ke dalam EEDR. Bila anda ingin membaca data dari EEPROM, setelah proses pembacaan berakhir, anda membaca EEDR untuk data.
EECR mempunyai bit-bit control yang diperlukan untuk pembacaan dan penulisan EEPROM. Penulisan ke suatu EEPROM tidak sederhana seperti menulis ke SRAM misalnya.Waktu akses tulis untuk EEPROM pada mikrokontroler AVR berkisar 2.5 sampai 4.0 ms, tergantung pada tegangan suplai. Bit control EEWE dalam EECR menginjinkan pemakai untuk mendeteksi bila data yang diminta sebelumnya telah ditulisi ke EEPROM dan apakah sebuah byte baru dapat ditulisi.
2.2.7 Two Wire Serial Interface
2.2.7.1 Konsep Two Wire Serial Interface
Antarmuka serial 2 kabel(TWI) sangat ideal untuk diterapkan pada aplikasi menggunkan mikrokontroler. Protocol ini mengijinkan desain sistem untuk saling berkoneksi sampai 128 piranti yang berlainan menggunakan hanya 2 jalur dua arah, satu untuk clock (SCL) dan satunya untuk data (SDA). Perangkat keras eksternal yang dibutuhkan untuk mengimpletasikan jaringan ini adalah resistor pull-up tunggal untuk setiap jalur bus TWI.
Banyak perusahaan semikonduktor yang berusaha mengembangkan cara baru komunikasi antar IC yang lebih mendukung sebagai alternative dari hubungan antar-IC secara pararell (pararell bus). Salah satu metode yang dipakai secara luas adalah IIC(sering ditulis juga I2C), singkatan dari Inter Intergrated Circuit bus yang
2.2.7.2 Karakteristik Jaringan I2C
Setiap IC yang terhubung dalam I2C memiliki alamat yang unik yang dapat
diakses secara perangkas keras dengan protocol master slave yang sederhana, dan mampu mengakomodasikan multi-master. I2C merupakan bus serial dengan orientasi
data 8 bit, komunikasi 2 arah, dengan kecepatan transfer data sampai 100Kbit/s pada mode standard an 3,4 Mbit/s pada mode kecepatan tinggi. Jumlah IC yang dapat dihubungkan pada I2C bus hanya dibatasi oleh kapasitas beban pada bus, yaitu
maksimum 400pF.
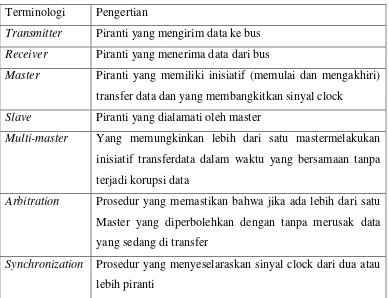
Tabel 2.2 Terminologi TWI
Terminologi Pengertian
Transmitter Piranti yang mengirim data ke bus
Receiver Piranti yang menerima data dari bus
Master Piranti yang memiliki inisiatif (memulai dan mengakhiri) transfer data dan yang membangkitkan sinyal clock
Slave Piranti yang dialamati oleh master
Multi-master Yang memungkinkan lebih dari satu mastermelakukan inisiatif transferdata dalam waktu yang bersamaan tanpa terjadi korupsi data
Arbitration Prosedur yang memastikan bahwa jika ada lebih dari satu Master yang diperbolehkan dengan tanpa merusak data yang sedang di transfer
Synchronization Prosedur yang menyeselaraskan sinyal clock dari dua atau lebih piranti
Kedua pin pada I2C, yaitu SDA dan SCL, harus memiliki kemampuan input
dan output serta bersifat open drain atau open collector. Kedua pin tersebut terhubung pada I2C bus yang telah dilakukan pull up dengan resistor ke catu daya positif dari
2.3 Sensor Warna
Sensor adalah yang digunakan untuk mengubah besaran fisis, sinar menjadi tegangan dan arus listrik.Sensor yang digunakan adalah sensor warna TCS3200.TCS3200 adalah IC (Integrated Circuit) pengkonversi warna cahaya ke frekuensi.Para TCS3200 dapat mendeteksi dan mengukur berbagai hampir tak terbatas warna terlihat. Aplikasi termasuk tes membaca strip, menyortir menurut warna, penginderaan cahaya lingkungan dan kalibrasi, dan pencocokan warna, untuk hanya beberapa. Komponen utama pembentuk IC ini, yaitu fotodioda dan pengkonversi arus ke frekuensi. fotodioda pada IC TCS3200 disusun secara array 8 x 8 dengan konfigurasi: 16 fotodioda untuk menfilter warna merah, 16 fotodioda untuk memfilter warna hijau, 16 fotodioda untuk memfilter warna biru, dan 16 fotodioda tanpa filter.
2.3.1 DT-SENSE Color Sensor
DT-SENSE COLOR SENSOR merupakan sebuah modul sensor warna berbasis sensor TAOS™ TCS3200 yang dapat digunakan untuk melakukan pengukuran komponen warna RGB (Red/Green/Blue) dari sebuah obyek. Modul sensor ini memiliki fasilitas untuk merekam hingga 25 data warna yang akan disimpan dalam EEPROM. Modul sensor ini dilengkapi dengan antarmuka UART TTL dan I2C. Contoh aplikasi DT-SENSE COLOR SENSOR antara lain untuk sistem sortir warna, color recognition, atau aplikasi-aplikasi lain yang menggunakan informasi komponen warna.
2.3.2 Spesifikasi DT-SENSE Color Sensor
DT-SENSE Color Sensor memiliki spesifikasi sebagai berikut:
Mampu mengukur komponen warna RGB dari sebuah objek berwarna.
Berbasis sensor TAOS TCS3200D.
Tersedia 2 LED putih untuk membantu pembacaan data warna pada obyek.
Tersedia fitur penyimpanan warna di EEPROM sebanyak 25 buah data.
Pin Input/Output kompatibel dengan level tegangan TTL dan CMOS.
Dilengkapi dengan antarmuka UART TTL dan I2C.
Konfigurasi komunikasi serial adalah : baudrate 9600 bps, 8 data bit, 1 stop bit, tanpa parity, dan tanpa flow control.
Dilengkapi dengan jumper untuk pengaturan alamat, sehingga bisa di-cascade
sampai 8 modul tanpa perangkat keras tambahan (untuk satu master
menggunakan antarmuka I2C).
Sumber catu daya menggunakan tegangan 4,8 - 5,4 VDC.
Antarmuka I2C mendukung bit rate data hingga 50 kHz.
Pada antamuka I2C modul ini dapat di-cascade hingga 8 modul tanpa hardware tambahan.
Pengaturan alamat hardware I2C melalui pengaturan jumper.
Tabel 2.3 Fungsi Terminal
Konektor I/O PORT (J3) berfungsi sebagai konektor untuk catu daya modul, antarmuka UART TTL, dan antarmuka I2C.Jumper PULL-UP (J4) berfungsi untuk mengaktifkan resistor pull-up untuk pin SDA dan SCL pada antarmuka I2C.Apabila lebih dari satu modul dihubungkan pada I2C-bus maka jumper J4 (SCL/SDA) salah satu modul saja yang perlu dipasang.Jumper ADDRESS (J1) berfungsi untuk mengatur alamat I2C dari modul DT-SENSE COLOR SENSOR.
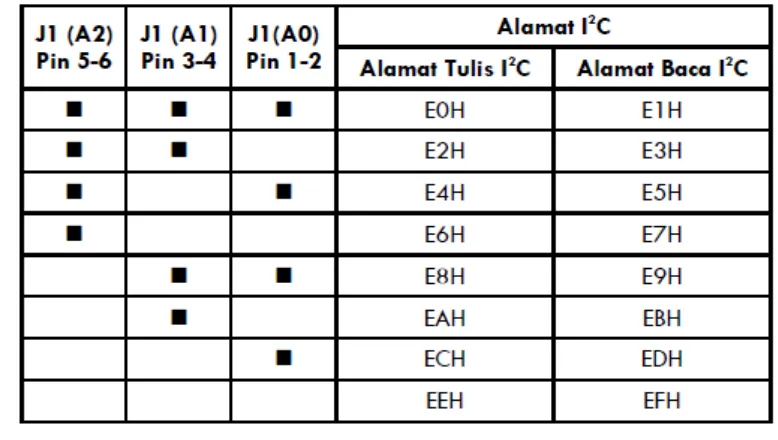
Tabel 2.5 Alamat Jumper Pin
Keterangan : ■ : jumper terpasang
2.3.3 Perangkat Lunak DT-SENSE Color Sensor
DT-SENSE COLOR SENSOR memiliki antarmuka UART TTL dan I2C yang dapat digunakan untuk menerima perintah atau mengirim data.
a. Antarmuka UART TTL
Parameter komunikasi UART TTL adalah sebagai berikut:
9600 bps
8 data bit
1 stop bit
tanpa parity bit tanpa flow control
Semua perintah yang dikirim melalui antarmuka UART TTL dimulai dengan
mengirim 1 byte data yang berisi <nomor perintah> dan (jika diperlukan) 1 byte data
Jika perintah yang telah dikirimkan merupakan perintah yang meminta data dari
modul DT-SENSE COLOR SENSOR, maka DT-SENSE COLOR SENSOR akan
mengirimkan data melalui jalur TX TTL.
b. Antarmuka I2C
Modul DT-SENSE COLOR SENSOR memiliki antarmuka I2C.Pada antarmuka I2C
ini, modul DT-SENSE COLOR SENSOR bertindak sebagai slave dengan alamat
sesuai dengan telah ditentukan sebelumnya melalui pengaturan jumper (lihat bagian
tabel 2.2). Antarmuka I2C pada modul DT-SENSE COLOR SENSOR mendukung bit
rate sampai dengan maksimum 50 kHz.
Semua perintah yang dikirim melalui antarmuka I2C diawali dengan start condition
dan kemudian diikuti dengan pengiriman 1 byte alamat modul DT-SENSE COLOR
SENSOR. Setelah pengiriman alamat, selanjutnya master harus mengirim 1 byte data yang berisi <nomor perintah> dan (jika diperlukan) 1 byte data parameter perintah.
Selanjutnya, setelah seluruh parameter perintah telah dikirim, urutan perintah diakhiri
dengan stop condition.
Berikut urutan yang harus dilakukan untuk mengirimkan perintah melalui antarmuka
I2C.
Gambar 2.7 Contoh paket data digital yang dikirim
Jika perintah yang telah dikirimkan merupakan perintah yang meminta data dari
modul DT-SENSE COLOR SENSOR, maka data-data tersebut dapat dibaca dengan
membaca data dari DT-SENSE COLOR SENSOR.
Gambar 2.8 Contoh paket data digital yang dibaca
2.4 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator terdiri dari 2 jenis, yaitu:
1. Aktuator Elektrik
2. Aktuator Pneumatik dan Hidrolik
Aktuator yang sering digunakan sebagai penghasil gerak rotasi, seperti motor DC magnet permanen, motor DC Brushless, motor DC Servo dan motor DC Stepper.
2.4.1 Motor DC Magnet Permanen
Motor arus searah (DC) adalah peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik yang disain awalnya diperkenalkan oleh Michael Faraday lebih dari seabad yang lalu. Konstruksi dasar motor DC terdiri dari 2 bagian utama, yaitu rotor dan stator.Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya.
2.4.2 Prinsip kerja Motor DC
menentukan arah gaya Lorentz, dimana gaya jatuh pada telapak tangan, jari-jari yang direntangkan menunjukkan arah gaya. Kedua gaya yang timbul merupakan sebuah kopel. Kopel yang dibangkitkan pada kumparan sangat tidak teratur karena kopel itu berayun antara nilai maksimum dan nol. Kumparan-kumparan tersebut dihubungkan dengan lamel tersendiri pada komutator sehingga motor arus searah tidak berbeda dengan generator arus searah.
2.4.3 Motor Servo
Motor DC Servo (DC-SV) pada dasarnya adalah motor DC-MP dengan kualifikasi khusus yang sesuai dengan aplikasi “servoing” di dalam teknik kontrol. Dalam kamus Oxford istilah “servo” diartikan sebagai “a mechanism that controls a larger
mechanism”. Motor servo merupakan motor DC yang mempunyai kualitas tinggi,
sudah dilengkapi dengan sistim kontrol di dalamnya. Dalam aplikasi motor servo sering digunakan sebagai kontrol loop tertutup untuk menangani perubahan posisi secara tepat dan akurat. Begitu juga dengan pengaturan kecepatan dan percepatan.
(a) Bentuk fisik (b) Pin-Pin dan Pengkabelan
Gambar 2.9 Model Fisik dan Pin-Pin Motor servo
Prinsip utama pengontrolan motor servo adalah pemberian nilai PWM pada kontrolnya. Perubahan duty cycle akan menentukan perubahan posisi dari motor servo. Mode pensinyalan motor servo tampak pada gambar 2.10.
Gambar 2.10 Mode Pensinyalan motor servo
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data lebih dari 1.5 ms maka posisi mendekati 180 derajat. Contoh Posisi dan Waktu Pemberian Pulsa tampak pada gambar 4.
Gambar 2.11 Contoh Posisi dan Waktu Pemberian Pulsa
kiri dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5ms, maka rotor akan berputar ke arah kanan dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.5 Sensor Infra Merah
Infra merah merupakan piranti yang sangat umum digunakan dalam suatu sistem instrumentasi. Infra merah dapat didefinisikan sebagai alat pemberi sinyal pada sensor. Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima.
Infra merah yang digunakan dalam sistem instrumentasi pengukuran kecepatan benda yang bergerak berupa cahaya yang memiliki panjang gelombang dan radiasi yang tajam. Adapun pemancar atau penembak cahaya yang dapat digunakan, seperti Infra red dan dioda laser.
Infra merah prinsip kerjanya sama seperti LED biasa. Perbedaannya cahaya yang dipancarkan pada Infra red LED berupa cahaya tak tampak. Infra red LED memiliki panjang gelombang sebesar 750-1000nM dan arus maksimal sebesar 100mA.
Kelemahan dari Infra red ini adalah daya jelajah yang tidak jauh hanya sekitar 7-8 meter dengan sudut radiasi sebesar 450.
2.5.1 LED Infra Merah
pada persambungan antara dua jenis semikonduktor dimana setiap penggabungan disertai dengan pelepasan energi. Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya melainkan dalam bentuk panas sebagian. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati chip LED. Ini menyebabkan chip LED tidak akan mengeluarkan emisi cahaya.
Pemancar infra merah adalah dioda solid state yang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda bias maju. Bila diberi bias maju elektron dari daerah-n akan menutup lubang elektron yang ada didaerah-p. Selama proses rekombinasi, energi dipancar ke luar dari permukaan p dan n dalam bentuk foton. Foton-foton yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam bentuk radiasi energi. Umumnya bahan Galium Arsenida (GaAs) menghasilkan warna merah, oranye-merah, oranye, dan kuning.
2.5.2 Fotodiode
P N
+
-Berkas cahaya
Anode Chatode
Gambar 2.12 Sambungan P-N dan symbol fotodiode
2.5.3 Switch Sensor DFRobot Adjustable Infrared
Switch Sensor DFRobot Adjustable Infrared adalah seperangkat pemancar dan penerima di salah satu sensor saklar fotoelektrik. Jarak deteksi dapat disesuaikan dengan permintaan. Sensor ini memiliki jangkauan deteksi 3-80cm. Switch Sensor DFRobot Adjustable Inframerah kecil, mudah digunakan, murah, mudah untuk merakit dan dapat secara luas digunakan dalam robot untuk menghindari rintangan, media interaktif, jalur industri perakitan, dan acara-acara lainnya. Output sinyal beralih berbeda sesuai dengan hambatan. Ini tetap tinggi bila tidak ada hambatan dan tetap rendah bila ada hambatan. Ada cahaya terang di belakang probe untuk mendeteksi lingkup 3cm - 80cm.
Gambar 2.13 Sensor Switch Infra merah Adjustable
a) Memiliki pin out berwarna merah adalah V+, kabel warna kuning adalah sinyal, kabel warna hijau adalah menghubungkan ke ground(GND).
b) Deteksi Adjustable memiliki jarak yang bisa dideteksi oleh sensor yang dapat diatur berkisar, 3cm - 80cm.
c) Memiliki bentuk yang kecil, sehingga mudah digunakan atau hal merakit, murah.
d) Alat ini berguna untuk robot, media interaktif, jalur perakitan industri, dan lain-lain.
e) Menggunakan Power supply: 5V
f) Berbasis photoelectric sensor yang dapat digunakan sebagai penerima ataupun pengirim sinyal inframerah.
g) Memiliki output data : tegangan digital.
h) Cocok digunakan untuk aplikasi robotika, seperti: menghindari objek, interactive media, dan lain-lain.
i) Memliki perlengkapan : Modul sensor + kabel data.
2.6 LCD 16X2
LCD merupakan salah satu perangkat penampil/ display yang banyak digunakan. Teknologi LCD memberikan lebih keuntungan dibandingkan dengan teknologi CRT, karena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa mikroampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah dibawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang atau dalam kondisi yang gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
BAB III
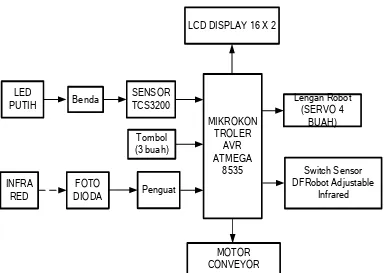
Gambar 3.1 Diagram Blok Rangkaian Sistem
yang digunakan adalah sensor warna jenis DT Sense Color yang merupakan modul sensor warna berbasis sensor TAOSTM TCS3200D yang dapat mengenali/mendeteksi warna melakukan pengukuran komponen warna RGB(Red/Green/Blue) dari sebuah benda/obyek sampai 25 warna.
Prinsip kerja dari sensor warna ini adalah ketika suatu benda/obyek tepat berada dibawah lensa sensor warna maka warna akan dibaca oleh sensor dan setelah itu akan disimpan pada EEPROM mikrokontroler. Tombol berfungsi untuk mengkalibrasi warna sensor, tombol penyimpanan dan menghapus data yang disimpan pada EEPROM. Konvoyer yang digunakan yaitu bidang datar yang digerakkan oleh motor agar benda/obyek yang akan disortir dapat berjalan menuju ruang baca warna obyek. Motor konveyor yang digunakan adalah motor servo yang sebelumnya telah diatur sedemikian rupa sehinga pergerakan atau derajat kebebasan motor servo sampai 3600. Ketika benda/obyek mengenai infra red yang berada di dalam ruang baca sensor maka infra red akan mengintruksikan agar motor konveyor berhenti. Sehingga posisi benda/obyek berada tepat di bawah sensor warna. LCD ((Liquid Cristal Display)digunakan untuk menampilkan data warna yang telah disimpan sebelumnya (Red/Green/Blue) dan nomor warna benda/obyek, serta tampilan instruksi-instruksi yang akan dilakukan ketika mengkalibrasi sensor warna pada obyek/benda. Switch Sensor DFRobot Adjustable Infrared adalah sensor yang sering digunakan pada robotika yang digunakan sebagai mengetahui penghalang yang ada di depan. Tapi disini sensor ini digunakan untuk mengetahui apakah benda/obyek yang telah keluar dari ruang baca warna siap untuk mengintruksikan pada robot lengan untuk mengangkat benda/obyek lalu memindahkan ke tempatnya. Mikrokontroler AVR ATMega8535 yang digunakan untuk sebagai pusat kontrol dan proses input output dari motor, lengan robot atau dengan kata lain, mokrokontroler merupakan penggerak dan pengendali dari semua mekanik yang ada pada sistem.
Lengan robot yang terdiri dari 4 buah servo, yang masing2 digunakan pada fungsi kegunaan yang berbeda. Lengan robot terdiri dari:
1. Jari/Penjepit(Gripper) 2. Siku
3.1.2 Sistem Kontrol Robot
Error = Gerak referensi – Gerak aktual
Hasil Gerak (dibaca oleh
sensor)
Gerak Aktual
Gambar 3.2. Sistem Kontrol Robot Loop Tertutup
Dari blok diagram diatas terlihat bahwa sistem kontrol robot bekerja dengan mengumpan balikkan gerak yang terbaca oleh sensor dan membandingkan dengan referensi gerak robot yang diinginkan. Berdasarkan error antara kecepatan yang di baca oleh sensor dengan refrensi gerak melalui mikrokontroler akan melakukan perbandingan untuk meminimalisir nilai error sehingga mencapai set point.
3.1.2.1 Cara Kerja Alat
3.1.3 Perancangan keseluruhan rangkaian, konveyor dan lengan robot
Perancangan alat ini adalah mencakup cara pembuatan/perancangan konveyor statis bidang datar dan pembuatan/perancangan lengan robot untuk mengambil benda/obyek dan ukuran benda yang digunakan. Dalam hal ini sistim perancangan yang ingin dibuat adalah seperti gambar 3.2 di bawah.
1
Gambar 3.3 Perancangan Sistem Pemetaan
3.1.3.1 Perancangan konveyor
Dalam perancangan konveyor ini digunakan konveyor statis bidang datar dibuat berbentu balok memanjang tidak beruang dan padat yang di gerakkan oleh motor servo. Motor servo yang digunakan adalah sebenarnya motor servo yang umum dipakai orang hanya saja motor servo yang digunakan pada konveyor sudah diatur sedemikian rupa atau pembatas derajat kebebasan servo sudah dilepaskan. Dengan kata lain motor servo yang seharusnya bergerak dengan hanya maksimum sampai 1800 maka sekarang derajat kebebasan gerak dari servo sampai 3600, sehingga motor servo akan bergerak terus memutar ke kiri atau ke kanan dengan hanya memberikan pulsa pada servo. Konveyor statis bidang datar yang dirancang terbuat dari bahan kayu dan sudah dilapisi belt diputar oleh gir belt berbentuk bulat yang terhubung pada motor servo agar dapat diputar. Untuk melihat hasil perancangan dapat dilihat pada gambar di bawah ini:
Gambar 3.4 Konveyor statis bidang datar
Gambar 3.3 merupakan perancangan konveyor statis bidang datar yang dilengkapi dengan motor servo dan dihubungkan pada belt sehingga dapat menggerakkan atau memutar beltnya.
3.1.3.2 Perancangan lengan robot
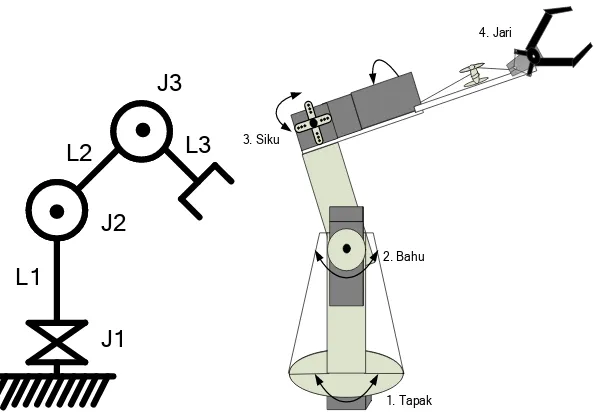
J1 J2
J3
L1
L2 L3
1. Tapak 2. Bahu 3. Siku
4. Jari
Gambar 3.5 - (a) Rancangan bentuk robot lengan dalam Free Body Diagram (FBD). (b) konfigurasi robot lengan dengan gambar Ms.Visio
Lengan robot yang digunakan memiliki tiga(3) derajat kebebasan yang terdiri dari:
1. Tapak
Tapak disini berfungsi sebagai penahan dari jari, siku dan bahu serta memutar untuk meletakkan posisi benda/obyek ke tempat sesuai yang telah ditentukan sebelumnya.
2. Bahu
Siku dan bahu berfungsi menurunkan posisi benda atau dengan kata lain meletakkan benda/obyek ke tempat yang telah ditentukan.
3. Siku
Siku dan bahu berfungsi menurunkan posisi benda atau dengan kata lain meletakkan benda/obyek ke tempat yang telah ditentukan.
4. Jari / Penjepit(Gripper)
3.1.4 Sensor Warna
Sensor warna yang digunakan DT-SENSE COLOR SENSOR yang merupakan sebuah modul sensor warna berbasis sensor TAOSTM TCS3200 yang dapat digunakan untuk melakukan pengukuran komponen warna RGB (Red/Green/Blue) dari sebuah benda atau obyek. Modul sensor ini dilengkapi dengan antarmuka UART TTL dan I2C dan penyimpanan data warna di dalam EEPROM.
Prinsip kerja dari sensor ini adalah ketika obyek/benda mengenai sensor, sensor akan membaca warna pada obyek. Sensor akan membaca data warna RGB (Red/Green/Blue) obyek pertama sekali atau dilakukan pengkalibrasian warna obyek pada sensor. Proses pengkalibrasian dilakukan dengan meletakkan benda/obyek warna putih di bawah lensa DT-SENSE COLOR SENSOR yang selanjutnya proses pengkalibrasian disebut dengan white balance. Lalu letakkan lagi benda/obyek warna hitam di bawah lensa DT-SENSE COLOR SENSOR yang selanjutnya proses pengkalibrasian ini disebut dengan Black balance. Proses pengkalibrasian ini dilakukan supaya menjadi referensi sensor warna putih dan warna hitam untuk pembacaan warna DT-SENSE COLOR SENSO. Setelah pembacaan warna putih dan hitam maka referensi disimpan pada EEPROM. Setelah itu dilakukan pembacaan warna RGB. Sensor akan mengurangkan data warna Rp, Gp, Bp dengan (RGB)d dengan
nilai absolut. Setelah pembacaan maka akan dilakukan pembacaan alamat data satu persatu lalu membandingkan komponen warnanya dengan data yang tersimpan pada EEPROM. Setelah dibandingkan, data warna yang paling kecil atau data yang mendekati dengan nilai yang pertama maka sensor akan mengambil alamat data warna tersebut lalu ditampilkan hasilnya pada LCD yang sudah ditentukan warna tersebut sebelumnya.
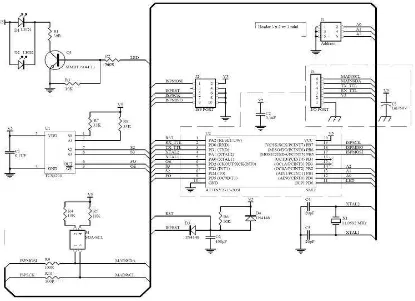
Gambar 3.6 Skematik DT-SENSE COLOR SENSOR
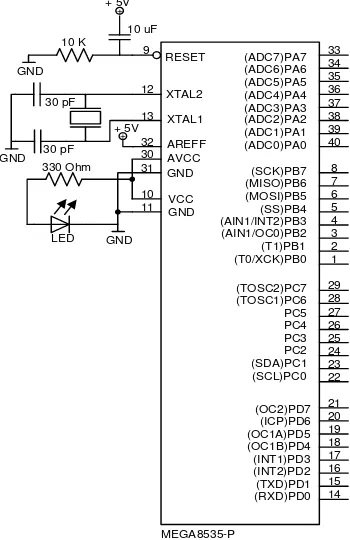
3.1.5 Rangkaian Mikrokontroler ATMEGA8535
Komponen-komponen elektronika yang digunakan dalam perancangan sistem minimum mikrokontroler ATMega8535 ini adalah:
1. Chip IC mikrokontroler ATMega8535 2. Kristal 11.0592 MHz
3. Kapasitor 4. Resistor
Rangkaian sistem minimum mikrokontroler ATMega8535 ditunjukkan pada gambar 3.6.
Gambar 3.7 Rangakain Mikrokontroler ATMega8535
Mikrokontroler ini memiliki 32 port I/O, yaitu port A, port B, port C, dan port D. pin 33 sampai 40 adalah port A yang merupakan port ADC, dimana port ini dapat menerima data analog. Pin 1 sampai 8 adalah port B. pin 22 sampai 29 adalah Port C. dan pin 14 sampai 21 adalah port D. Pin 10 dihubungkan ke sumber tegangan 5 Volt. Dan pin 11 dihubungkan ke ground. Rangkaian sistem minimum mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya. Pada dasarnya, kecepatan mikrokontroler dalam mengeksekusi data atau suatu perintah dipengaruhi oleh nilai Kristal yang digunakan pada sistem minimum tersebut. Sedangkan pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground. Kedua
komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan aktifnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut.
3.1.6 Rangkaian Power Supply (PSA)
Rangkaian power supply berfungsi untuk mensupply arus dan tegangan ke seluruh rangkaian yang ada.Rangkaian power supply ini menghasilkan 1 keluaran,yaitu 5 volt,keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian.Trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC.Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 2200µF.Regulator tegangan 5 volt (LM7805CT)digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya.LED hanya sebagai indikator apabila PSA dinyalakan.
Gambar 3.8 Rangkaian Power Supplay (PSA)
3.1.7 Perancangan Rangkaian Sensor Kedekatan
kedekatan yang digunakan adalah lima pemancar infra merah dengan sebuah potodioda dan sebuah rangkaian penerima sinyal infra merah. Prinsip kerjanya adalah dengan memanfaatkan pantulan dari sinar infra merah yang dipancarkan oleh LED infra merah. LED infra merah dan potodioda dipasang sejajar, sehingga dalam keadaan normal, tidak ada benda yang mendekat, maka sinar infra merah akan terus ke depan (tidak ada yang dipantulkan). Namun ketika ada benda yang mendekat, kemudian sinar infra merah mengenai benda tersebut, maka sebagian sinar akan dipantulkan dan pantulannya akan mengenai potodioda. Potodioda yang terkena pantulan sinar infra merah akan mengalami perubahan hambatan, sehingga tegangan yang dihasilkan juga akan berubah. Perubahan tegangan inilah yang kemudian diolah oleh rangkaian pengolah sinyal agar menjadi sinyal digital, kemudian dikirimkan ke mikrokontroler. Rangkaian pemancar dan penerima infra merah tampak seperti gambar 3.9
Gambar 3.9 Rangkaian sensor infra merah dengan fotodioda
Perhatikan gambar 3.9 arus yang mengalir pada fotodioda (saat ada berkas cahaya inframerah/IR yang diterima) dibatasi oleh resistor 10K sehingga
Perhatikan gambar 3.9 arus yang mengalir pada fotodioda (saat ada berkas cahaya inframerah/IR yang diterima) dibatasi oleh resistor 10K sehingga
RB VBB
Ib ( )
………..… (3.1) Dimana, VBB = Vcc – VD ………,,..…., (3.2)
mA kembali sehingga masuk ke transistor 2 sehingga
Ib2 = 0,1 A X 200 = 20 A ………...……. (3.6)
Arus yang dibutuhkan LED (Light Emitting Diode) agar menyala adalah ………..……… (3.7)
Untuk mengetahui berapa arus yang masuk pada rangkaian di atas arus total yang terjadi saat photodiode dikenai oleh infra merah adalah
Itotal = Ib1 X Ib2 X Ib X ILED
Itotal = 0.1 X 20 X 0,0005 X 0,015 = 0,015 mA
Arus yang dibutuhkan LED untuk menyala maksimum sebesar 10 mA sehingga nilai arus (ILED) yang dibatasi Rd telah optimal untuk memberikan pancaran
cahaya indikasi. Tabel di bawah ini akan menunjukkan kesimpulan karakteristik sistem masukannya (sensing).
Potodioda memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar infra merah, dan hambatannya akan berubah menjadi sekitar 80 s/d 30 Kohm jika terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Pada rangkaian di atas, output dari potodioda diumpankan ke basis dari transistor tipe NPN C945, ini berarti untuk membuat transistor tersebut aktip maka tegangan yang keluar dari potodioda harus lebih besar dari 0,7 volt. Aktipnya transistor C945 akan menyebabkan kolektornya terhubung ke emitor, sehingga kolektor mandapat tegangan 0 volt dari ground, tegangan ini diumpankan ke basis dari transistor ke-2 tipe NPN C945. Seterusnya aktipnya transistor C945 akan menyebabkan kolektornya terhubung ke emitor, sehingga kolektor mandapat tegangan 5 volt dari Vcc. Kolektor dari transistor C945 dihubungkan mikrokontroler ATMega8535 sehingga jika transistor ini
aktip, maka kolektor akan mendapatkan tegangan 0 volt dari ground. Tegangan 0 volt inilah yang merupakan sinyal low (0) yang diumpankan ke mikrokontroler ATMega8535, sehingga mikrokontroler dapat mengetahui bahwa sensor ini mengirimkan sinyal, yang berarti bahwa ada benda yang berada di dekat sensor sehingga pantulan sinar infra merah mengenai sensor.
Namun ketika tidak ada benda di dekat sensor, maka pantulan sinar infra merah tidak ada yang mengenai potodioda, sehingga sensor akan mengirimkan sinyal high ke mikrokontroler.
Transistor C945 sekaligus berfungsi untuk menyalakan LED sebagai indikator bahwa sensor ini menerima pantulan sinar infra merah dari pemancar. LED ini akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
TABEL 3.1 Kondisi masukan terhadap logika keluaran
Berkas IR Diterima Sensor Sistem keluaran
ADA HIGH (LED off)
KOSONG LOW (LED on)
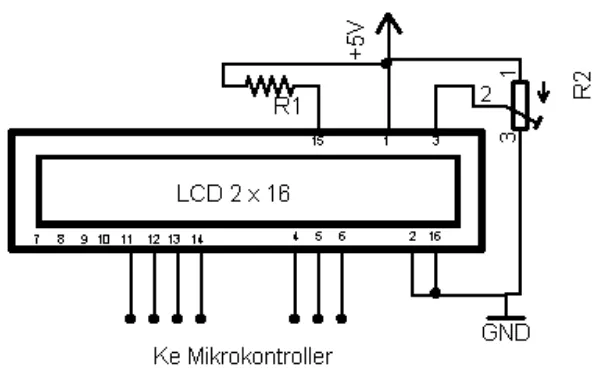
3.1.8 Rangkaian LCD (Liquid Crystal Display) 2 x16
Rangkaian skematik konektor yang dihubungkan dari LCD (liquid crystal display) ke mikrokontroler dapat dilihat pada gambar dibawah ini.
supply 5 Volt DC sedangkan Ground (GND) adalah kaki 2, kaki 16 dan kaki ground trimport.
Gambar 3.10 Rangkaian Skematik Konektor yang dihubungkan dari LCD ke Mikrokontroler
3.2 Perancangan Diagram Alir Program Perangkat Lunak (Software)
Diagram alir program ini terdiri dari dua bahagian, yaitu diagram alir program utama mikrokontroler dan diagram alir proses pembacaan warna benda oleh sensor warna. Pada diagram alir program utama ini adalah berupa proses pengenalan/pembacaan warna obyek dan meletakkan benda/obyek pada tempatnya. Untuk lebih jelasnya, dibawah ini adalah diagram alir program utama dan diagram alir pembacaan warna.
1. Diagram alir program utama
diagram ali berikutnya. Setelah pembacaan warna dilakukan maka data warna dan warna no berapa benda ditampilkan pada LCD. Setelah ditampilkan maka motor konveyor akan kembali berjalan membawa benda. Ketika benda mengenai Switch Sensor DFRobot Adjustable Infrared maka motor konveyor akan berhenti dan seketika itu juga lengan akan menjepit benda pada gripper robot lalu meletakkan benda sesuai tempat yang telah ditentukan sebelumnya. Lengan robot kembali ke posisi normal/default motor konveyor kembali berjalan dan begitu seterusnya dilakukan sampai ke 16 warna tercapai.
Sensor Adjustable IR
2. Diagram alir pembacaan warna oleh sensor
Proses pengkalibrasian dilakukan dengan meletakkan benda/obyek warna putih di bawah lensa DT-SENSE COLOR SENSOR yang selanjutnya proses pengkalibrasian disebut dengan white balance. Lalu letakkan lagi benda/obyek warna hitam di bawah lensa DT-SENSE COLOR SENSOR yang selanjutnya proses pengkalibrasian ini disebut dengan Black balance. Proses pengkalibrasian ini dilakukan supaya menjadi referensi sensor warna putih dan warna hitam untuk pembacaan warna DT-SENSE COLOR SENSOR. Setelah pembacaan warna putih dan hitam maka referensi disimpan pada EEPROM. Setelah itu dilakukan pembacaan warna RGB. Sensor akan mengurangkan data warna Rp, Gp, Bp dengan (RGB)d dengan nilai absolut. Setelah
Mulai
Baca alamat akhir
Baca data warna Rp,Gp,Bp
Kurangkan data warna Rp,Gp,Bp dengan RD,GD,BD
H_R = abs(Rp-RD) H_G = abs(Gp-GD) H_B = abs(Bp-BD)
Hasil_awal = Hasil Simpan alamat hasil
awal
Alamat = alamat+1 Tambahkan Hasil RGB Hasil = H_R+H_G+H_B
Alamat=1 hasil awal=750
Tampilkan Rp,Gp,Bp, tampilkan
alamat yang dituju Hasil ≥ Hasil awal
Alamat = alamat akhir Baca data warna
RD ,GD, BD pada alamat
selesai
BAB IV
PENGUJIANALAT DAN PEMBAHASAN
Pada bab ini,akan dibahas pengujian alat mulai dari pengujian alat pemodul sampai pengujian alat secara keseluruhan dan hasil pengukuran alat. Pengujian tersebut akan dilakukan secara bertahap dengan urutan sebagai berikut:
4.1Pengujian Minimum Sistem
4.1.1 Pengujian Sistem Mikrokontroller AVR ATMEGA8535
Pada pengujian rangkaian mikrokontroller dilakukan percobaan yang sifatnya sederhana tapi dapat menunjukkan bekerja tidaknya minimum sistem pada rangkaian tersebut.Percobaan tersebut adalah menghidupkan beberapa buah LED secara bergantian.Percobaan ini dilakukan pada I/O port(port A).Untuk menghidupkan LED tersbut digunakan program sebagai berikut:
while (1) {