DAFTAR PUSTAKA
[1] Christanto, Danny; Pusporini, Kris. 2004. Panduan Dasar Mikrokontroler
Keluarga MCS-51. Surabaya: Innovative Electronics.
[2] Robotika:Desain,control,dan kecerdasan buatan”,jakarta: ANDI,2007.
[3] Taufiq dwi septian suyadhi, ”Build your own line follower ROBOT”, jakarta :ANDI,2000.
[4] Owen Bishop, “Dasar-Dasar Elektronika”, Jakarta : Erlangga, 2002.
BAB 3
PERANCANGAN SISTEM
Perancangan sistem mini robotik berbasis ASK ini diawali dengan pembuatan blok diagram, diamana tiap-tiap blok saling berhubungan satu dengan yang lain. Perancangan sistem ini dibagi menjadi dua bagian utama yaitu perancangan bagian pemancar dan penerima.
3.1 Diagram Blok Sistem
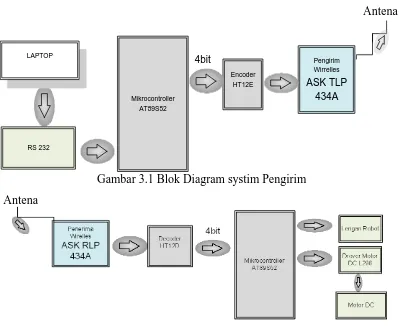
Sebagai langkah awal dalam memudahkan pembuatan sistem ini dibuatlah suatu diagram blok yang merupakan gambaran secara umum yang menggambarkan bagaimana cara kerja rangkaian secara keseluruhan seperti yang ditunjukkan dalam Gambar 3.1 dan gambar 3.2 di bawah ini.
Antena
Gambar 3.1 Blok Diagram systim Pengirim Antena
Gambar 3.2 Blok Diagram systim Penerima
Encoder HT12E
Mikrocontroller AT89S52
Pengirim Wirrelles
ASK TLP 434A 4bit
3.1.1 Penjelasan Dari Setiap Diagram Blok Sistem Diatas
Adapun Prinsip kerja dari Gambar 3.1 dan Gambar 3.2 adalah sebagai berikut: 1. Laptop
Laptop digunakan sebagai pengontrol gerak pada Lengan Robot seperti: Maju, Mundur, Angkat lengan, Turun Lengan, Putar Lengan, Jepit Lengan. Dan pada Laptop dibuat suatu desain tombol mana-mana saja yang akan digunakan sebagai perintah untuk menggerakkan seluruh Lengan Robot.
2. RS -232
RS – 232 digunakan sebagai perantara atau penghubung Laptop dengan Micro agar dapat saling berkomunikasi Laptop denga micro atau pun sebalikya.
3. Mikrokontroler pada pengirim
Merupakan pusat proses pengolahan Data, dan menerima data serial yang dikirim oleh laptop kemudian mengolah data tersebut, selanjutnya mengambil keputusan data apa yang harus dikirim pada modul Encoder.
4. Encoder HT – 12E
Tempat pengolahan data yang dikirim oleh Microkontroller dan agar data tersebut dapat diteruskan ke bagain ASK TLP 434A.
5. ASK TLP 434A
Berfungsi untuk mengirimkan data ke penerima ASK RLP 434A. 6. ASK RLP 434A
Berfungsi sebagai penerima data dari ASK TLP 434A, dan data tersebut akan dimasukkan pada IC Dekoder HT – 12D.
7. Dekoder HT – 12D
IC Decoder ini berfingsi sebagai pengolah data dari ASK RLP 434A, dan data tersebut diproses dan kemudian akan dikirim ke Microkontroller.
8. Mikrokontroler Pada Penerima
Merupakan pusat proses mengendalikan semua perangkat pada robot. Data yang diterima dari penerima Decoder HT – 12D diolah dan Microkontroller mengambil keputusan perangkat mana saja yang akan digerakkan.
9. Lengan Robot
Motor Servo.
10. Driver Motor DC
Berfungsi sebagai gerbang penyuplaian arus untuk motor DC dan sekaligus mengendalikan laju putar motor searah jarum jam atau berlawanan arah jarum jam yang telah di kendalikan oleh mikrokontroler sebelumnya.
11. Motor DC
Berfungsi sebagai penggerak laju Robot agar dapat maju, mundur dan berbelok untuk mendekati benda yang akan diangkat oleh robot tersebut.
3.2 Perancangan Rangkaian Tiap Blok 3.2.1 Perancangan rangkaian Catu Daya
Rangkaian catu daya ini bertujuan untuk menyuplai tegangan keseluruh perangakat yang ada robot tersebut seperti: micro, RS232, dekoder, RLP, dan Servo. Rangakian catu daya ini dapat dilihat pada gambar 3.3 pengkoplingan catu daya.
gambar 3.3 pengkoplingan catu daya Karakteristik 7805 adalah:
1. Menstabilkan tegangan output pada 5V.
2. Mampu mengalirkan arus maksimal 1 A (artinya jika hanya butuh arus dibawah 1 A, tidak perlu komponen tambahan lainnya).
3. Kondisi 1 dan 2 tercapai jika:
a) Tegangan masuk "lebih besar" 3 Volt dari nilai "XX" nya, untuk 7805 berarti tegangan masuk minimal 8 Volt.
b) Suhu kerja pada body nya terjaga pada suhu ruangan (sekitar 30 derajat C, gunakan heatsink yang memadai).
4. Kondisi akan aman (tidak rusak) jika tegangan masuk tidak melebihi batas kemampuan nya (untuk 7805 maksimum tegangan input = 20 Volt).
Karene dibutuh kan arus sebesar 1 A maka IC regulator 78S05 kita kopling dengan TIP 31C. dikarenakan TIP 31C dapat melewatkan arus sebesar 3A. yang dapat kita lihat skema rangkaian seperti gambar 3.3 diatas.
3.2.2 Rangkaian Sistem Minimum Mikrokontroler AT89S52
Rangkaian ini berfungsi sebagai pengendali utama keseluruhan system yang ada. Komponen utama dari rangkaian ini adalah mikrokontroler AT89S52. Pada IC inilah program di-download, sehingga rangkaian dapat berjalan sesuai dengan yang dihendaki. Pada Gambar 3.4 berikut memperlihatkan system minimum mikrokontroler AT89S52.
Gambar 3.4 Rangkaian Sistem Minimum AT89S52
3.2.3 Perancangan Rangkaian Modul Pemancar Dengan AT89S52
Rangkaian modul pemancar yang di perlihatkan pada Gambar 3.5 berfungsi sebagai pengirim data masukan dari laptop berupa data serial dan mengolah data tersebut. Setelah di olah dan diproses oleh mikrokontroler maka data di kirim ke driver HT12E yang berupa data parallel melalui pin-AD8 sampai pin-AD11. Pentransmisian pada IC HT12E terjadi bila enable dapat bekerja secara aktif rendah dan pentransmisian ini akan di ulang selama IC HT12E masih menerima data yang di control oleh TE. Suatu waktu transmisi enable akan aktif tinggi yang mengindikasikan pengiriman data yang sudah komplit, kemudian akan berhenti untuk mengirimkan data melalui modul ASK yaitu TLP334. Data yang sudah dalam bentuk serial akan di kirimkan ke TLP433 melalui pin-17 yang di kendalikan oleh TE.
VCC
TE AD11 AD10 AD9 AD8
D out
OSC1
OSC2
HT12E VCC
Gnd
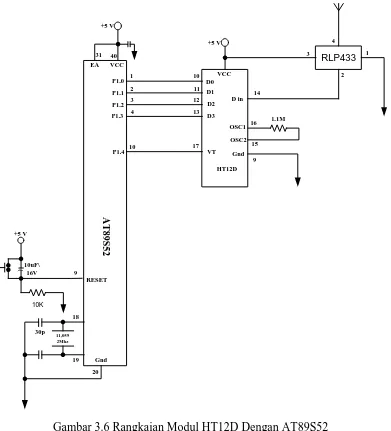
3.2.4 Perancangan Hubungan Modul Penerima RLP433 Dengan AT89S52 Interface IC HT12D ini merupakan pasangan IC HT12E yang fungsinya merupakan kebalikan dari IC HT12E. Data serial yang berasal dari penerima RLP433 akan di berikan ke interface IC HT12D melalui pin-14 yang di perlihatkan pada Gambar 3.6 Data tersebut akan di ubah menjadi bentuk data paralel oleh interface IC HT12D. Interface ini akan mendekodekan alamat pemancar beserta dengan data yang dikirim. Bila alamat yang di kirim pemancar sesuai dengan alamat yang di set pada penerima, maka penerima akan mendekodekan data tersebut dan mengubahnya menjadi data parallel yang siap untuk di umpankan ke mikrokontroler.
Gambar 3.6 Rangkaian Modul HT12D Dengan AT89S52
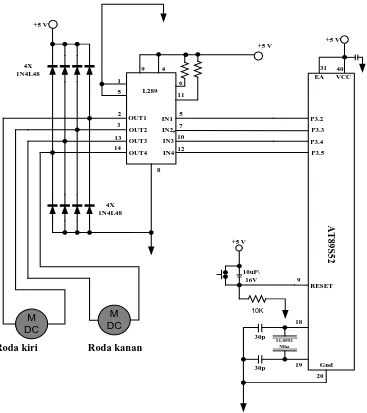
3.2.5 Rangkaian Modul Penggerak Motor DC dengan Driver L298 dan AT89S52
Untuk mengendalikan arah putaran motor DC kiri dan kanan, digunakan rangkaian driver motor L298. IC L298 double chip h-bridge yang sudah terintegrasi dalam satu buah IC. IC ini dapat menyalurkan arus sebesar 2A dalam
setiap h-bridge. Pemilihan komponen ini berdasarkan komsumsi arus pada tiap-tiap motor DC adalah sekitar 1,1A, sehingga L298 masih sanggup untuk
mengendalikan masing-masing motor DC. Rangkaian penggerak motor DC di perluhatkan pada Gambar 3.7 berikut ini.
Gambar 3.7 Rangkaian Pengendali Motor DC dengan Driver L298
V
Seluruh pengendalian pada IC L298 di kendalikan oleh mikrokontroler. Pin-6 dan pin-11 pada IC ini di berikan kondisi high, hal ini bertujuan agar kedua h-bridge internal pada IC L298 dapat di kendalikan dengan membrikan input dari
mikrokontroler. IC L298 memiliki kelebihan, yaitu catu daya logika terpisah dengan catu daya motor, sehingga penggunaan motor tidak terbatas pada tegangan tertentu saja, melainkan dapat di beri input tegangan yang di inginkan sesuai dengan spesifikasi motor yang digunakan.
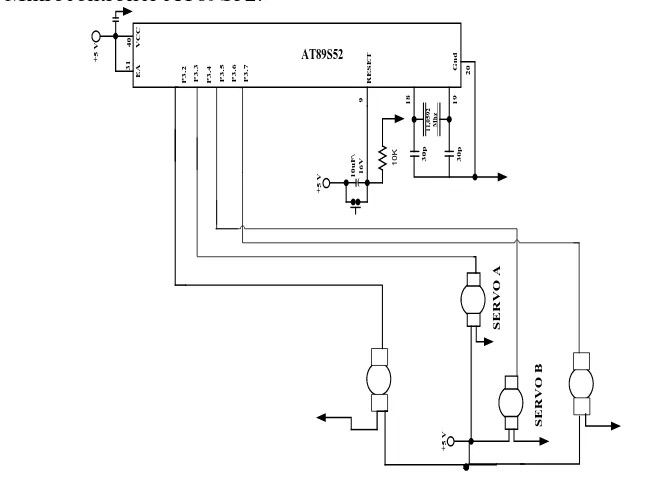
3.2.6 Perancangan Rangkaian Penggerak Motor Servo
Gambar 3.8 Menunjukan rangkaian penggerak motor servo, dimana lengan robot ini menggunakan 4 motor servo. Dimana motor Servo yang pertama digunakan untuk memutar keseluruhan lengan robot, yang dihubungkan ke port P0.0 Mikrocontroller AT89S52. Servo yang kedua digunakan untuk mengangkat lengan pendek pada robot yang dihubungkan ke port P0.1 Mikrocontroller AT89S52. Servo yang ketiga digunakan untuk mengangkat lengan panjang pada robot yang dihubungkan ke port P0.2 Mikrocontroller AT89S52. Servo yang keempat digunakan untuk menjepit (menckram) alat/bahan yang akan di pindahkan yang dipasang pada ujung lengan, Dan akan dihubungkan ke port P0.3 Mikrocontroller AT89S52.
3.3 Perancangan Perangkat Lunak
Setelah selesai melakukan pembuatan perangkat keras pada PCB, langkah selanjutnya adalah mem-persiapkan algoritma atau diagram alir dan mengimplementasikan diagram alir ke dalam pemrograman bahasa rakitan (assembly) yang diperlukan bagi AT89S52 agar sistem dapat berjalan sebagaimana yang diharapkan. Sebelum melakukan pembuatan/penulisan diagram alir, kita harus mempersiapkan identifi-kasi akses masukan dan keluaran bagi pengendali microcontoller AT89S52 untuk kebutuhan kendali sistem sebagaimana diperlihatkan pada Tabel 3.1 untuk bagian receiver dan pada tabel 3.2 untuk bagian transmitter.
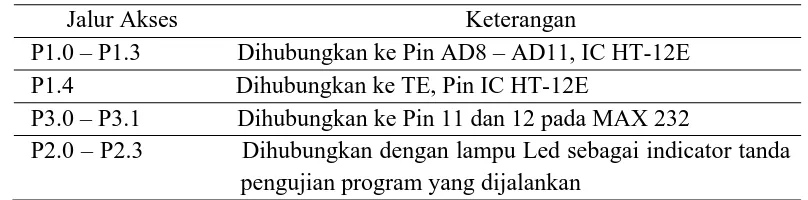
Tabel 3.1 akses masukan dan keluaran pada mikrocontroller AT89S52, untuk Pengiriman data.
Jalur Akses Keterangan
P1.0 – P1.3 Dihubungkan ke Pin AD8 – AD11, IC HT-12E P1.4 Dihubungkan ke TE, Pin IC HT-12E
P3.0 – P3.1 Dihubungkan ke Pin 11 dan 12 pada MAX 232
P2.0 – P2.3 Dihubungkan dengan lampu Led sebagai indicator tanda pengujian program yang dijalankan
Tabel 3.2 akses masukan dan keluaran pada microcontroller AT89S52, untuk penerima data.
Jalur Akses Keterangan
P0.0 – P0.3 Sebagai keluaran perintah untuk penggerak Motor Servo pada Lengan
P1.0 – P1.3 Dihubungkan ke Pin AD8 – AD11 pada IC HT-12D P1.4 Dihubungkan dengan VT pada Pin 17, IC HT-12D
3.3.1 Diagram alur Program Utama Untuk pengirim (Transmitter)
mulai
Inisialisasikan port P3 sebagai masukan Inisialisasikan port P1 sebagai keluaran
Periksa apakah ada data yang diterima oleh SBUF
Setting SCON 50H untuk pemilihan serial port MODE-1 Setting TMOD 21H untuk pemilihan TIMER-1 Setting PCON 00H untuk pemilihan SINGLE BAUT RATE
(SMOD=0)
Setting TCON 50H untuk mengaktifkan TIMER-1 Setting TH1 F4H untuk pengaturan BAUD RATE 2400 bps
Setting TL1 F3h untuk auto reload ke TH1
Ambil data yang di terima oleh SBUF dan muati ke A
Kirim data ke PENERIMA yang di muati ke A sebanyak 5 kali untuk menjamin kebenaran data yang akan di terima
selesai
Ada data Di SBUF
ya
tidak
3.3.2 Diagram Alir Program Utama Untuk Reseiver
mulai
Inisialisasikan port P1 sebagai masukan Inisialisasikan port P2 sebagai keluaran Inisialisasikan port P3 sebagai keluaran
Periksa apakah ada data di terima oleh P1
BAB 4
PENGUJIAN ALAT DAN HASIL
Pada BAB 4 ini, akan membahas beberapa bagian rangkaian yang akan di uji coba, sebelum melakukan perangkaian keseluruhan.
4.1 Pengujian Sistem Robot
4.1.1 Pengujian Sistem Mikrokontroler AT89S52 Secara Manual
Untuk pengujian rangkaian Mikrocontroller sudah berjalan dengan benar
maka digunakan LED sebagain indikator bahwa program berjalan dengan baik.
listing 4.1
ORG 00 SJMP START
ORG 30H
START: MOV P0,#01010101B SJMP $
End
Dan hasil dapat dilihat pada tabe 4.1, hasil led yang menyala dan yang
padam:
Tabel 4.1 hasil pengujian rangkaian mikrokontroller
Data yang dikirim
Data yang ditampilkan pada led Nilai
heksa
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
01010101b Padam Menyala Padam Menyala Padam menyala padam menyala 55h
4.1.2 Pengujian Data Serial Dari Labtop Ke Mikro AT89S52 Yang Ditampilkan Pada Led
mikrokontroler di tampilkan pada port P2, ini bertujuan untuk mengetahui apakah data yang diberikan oleh keyboard pada laptop telah sesuai dikirim ke AT89S52 dengan benar. Berikut listing 4.2 memperlihatkan program assembly untuk pengujian, dengan akses penerimaan data dari keyboard laptop.
listing 4.2
ORG 00H JMP BEGIN
BEGIN: MOV P0,#00H
INISIALSERIAL: MOV SCON,#50H ;pemilihan serial port MODE-1
MOV TMOD,#21H ;emilihan TIMER-1 pada MODE-2 (auto reload0
MOV PCON,#00H ;pemilihan SINGLE BAUDRATE MOV TCON,#50H ;aktifkan TIMER-1
MOV TH1,#0F4H ;F3 UNTUK penyetingan BAUTRATE 2400bps jika clock 12Mhz (0F4H jika clock 11,592Mhz)
MOV TL1,#0F3H ;mulai auto RELOAD
;======================BACA DATA DARI KEYBOARD===================
MULAI: JNB RI,$
WAIT20MS: ACALL DELAY1MS DJNZ R3,WAIT20MS RET
DELAY1S: MOV R3,#20 WAIT1S: ACALL DELAY50MS
DJNZ R3,WAIT1S RET
DELAY50MS: ;MOV TMOD,#01H ;MOV TCON,#10H MOV TH0,#3CH MOV TL0,#0AFH WAIT50MS: JBC TF0,FINISH50MS
SJMP WAIT50MS FINISH50MS: RET
;================================================================= DELAY1MS: ;MOV TMOD,#01H
;MOV TCON,#10H MOV TH0,#0FCH MOV TL0,#17H WAIT1MS: JBC TF0,FINISH1MS
SJMP WAIT1MS FINISH1MS: RET
;================================================================= DELAY105MS: MOV TH0,#0FAH
MOV TL0,#23H
WAIT105MS: JBC TF0,FINISH105MS SJMP WAIT105MS FINISH105MS: RET
END
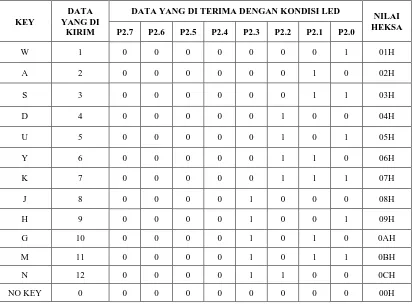
Pada Tabel 4.2 memperlihatkan hasil data yang di kirim dari keyboad
laptop yang di tampilkan dalam bentuk bilangan heksa dengan melihat kondisi led
Tabel 4.2 Data Yang di Kirim dan Yang diterima ditampilakan pada led
KEY
DATA YANG DI
KIRIM
DATA YANG DI TERIMA DENGAN KONDISI LED
NILAI
4.1.3 Pengujian lengan Robot Dengan Menggunakan limit switch
Pengujian ini dilakukan pada pin-21 ( P2.0 ) sampai pin-28 ( P2.7 ) seperti yang di perlihatkan pada Gambar …. Dan data yang diterima oleh mikrokontroler di tampilkan pada port P0 yang dihubungkan dengan motor servo pada lengan robot, ini bertujuan untuk mengetahui apakah data yang diberikan oleh limit switch telah sesuai dengan AT89S52. Berikut listing 4.3 memperlihatkan program assembly untuk pengujian, data dari limit switch untuk perintah kan motor servo bergerak, sebagai berikut:
listing 4.3
ORG 00H JMP BEGIN
MULAI: ACALL DELAY1S ACALL SERVOAWAL
SW0: JB P2.0,SW1
ACALL PUTARKIRI ACALL DELAY20MS SJMP SW0
SW1: JB P2.1,SW2
ACALL PUTARKANAN ACALL DELAY20MS SJMP SW0
SW2: JB P2.2,SW3
ACALL ANGKATLENGAN ACALL DELAY20MS SJMP SW0
SW3: JB P2.3,SW4
ACALL TURUNLENGAN ACALL DELAY20MS SJMP SW0
SW4: JB P2.4,SW5
ACALL LENGANJAUH ACALL DELAY20MS SJMP SW0
SW5: JB P2.5,SW6
ACALL LENGANDEKAT ACALL DELAY20MS SJMP SW0
SW6: JB P2.6,SW7
ACALL SERVOJEPIT ACALL DELAY20MS AJMP SW0
SW7: JB P2.7,SW0
AJMP SW0
ACALL DELAY20MS DJNZ R7,AWAL RET
;===========================ROTASI LENGAN========================= PUTARKANAN: MOV R6,#1
PTRKANAN: SETB P0.3 ACALL DELAY1MS CLR P0.3
ACALL DELAY20MS DJNZ R6,PTRKANAN RET
;--- PUTARKIRI: MOV R5,#1
PTRKIRI: SETB P0.3 ACALL DELAY1MS ACALL DELAY1MS CLR P0.3
ACALL DELAY20MS DJNZ R5,PTRKIRI RET
;===========================POSISI LENGAN========================== ANGKATLENGAN: MOV R6,#1
ACALL DELAY1MS CLR P0.2
ACALL DELAY20MS DJNZ R6,ANGKAT RET
;--- TURUNLENGAN: MOV R5,#1
TURUN: SETB P0.2
ACALL DELAY1MS ACALL DELAY1MS CLR P0.2
ACALL DELAY20MS DJNZ R5,TURUN RET
;===========================JARAK LENGAN========================== LENGANDEKAT: MOV R6,#1
DEKAT: SETB P0.1
ACALL DELAY1MS CLR P0.1
ACALL DELAY20MS DJNZ R6,DEKAT RET
;--- LENGANJAUH: MOV R5,#1
JAUH: SETB P0.1
ACALL DELAY1MS CLR P0.1
ACALL DELAY20MS DJNZ R5,JAUH RET
;=============================PENJEPIT================================== SERVOBUKA: MOV R6,#1
BUKA: SETB P0.0
ACALL DELAY1MS CLR P0.0
ACALL DELAY20MS DJNZ R6,BUKA RET
;--- SERVOJEPIT: MOV R5,#1
JEPIT: SETB P0.0 ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS CLR P0.0
ACALL DELAY20MS DJNZ R5,JEPIT RET
;================================================================= DELAY20MS: MOV R3,#20
;================================================================= DELAY1S: MOV R3,#20
WAIT1S: ACALL DELAY50MS DJNZ R3,WAIT1S RET
DELAY50MS: MOV TMOD,#01H MOV TCON,#10H MOV TH0,#3CH MOV TL0,#0AFH WAIT50MS: JBC TF0,FINISH50MS
SJMP WAIT50MS FINISH50MS: RET
;================================================================= DELAY1MS: ;MOV TMOD,#01H
;MOV TCON,#10H MOV TH0,#0FCH MOV TL0,#17H WAIT1MS: JBC TF0,FINISH1MS
SJMP WAIT1MS FINISH1MS: RET
;================================================================= DELAY105MS: MOV TH0,#0FAH
MOV TL0,#23H
WAIT105MS: JBC TF0,FINISH105MS SJMP WAIT105MS FINISH105MS: RET
END
Tabel 4.3 Data Yang di Kirim Dari limit switch dan perintah pada motor servo
No. limit switch yang ditekan Perintah limit switch ke motor servo
1 SW1 Putar lengan robot ke kiri
4.1.4 Pengujian Rangkaian Pemancar dan Penerima ASK
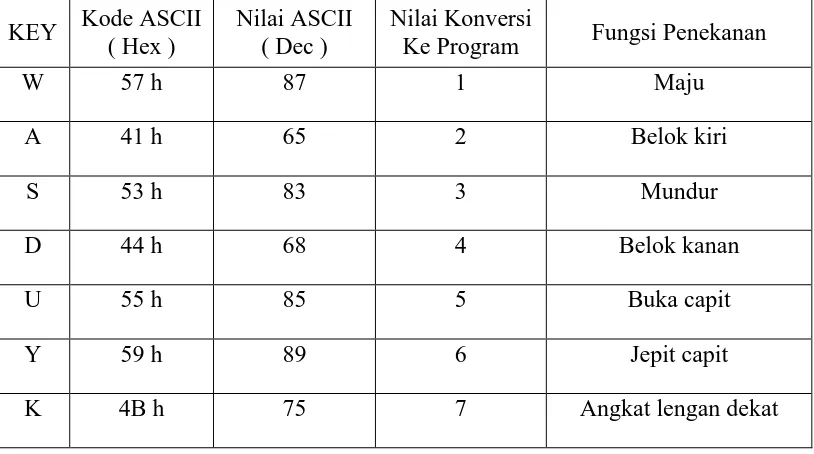
Pengujian ini bertujuan untuk mengetahui apakah data yang dikirim oleh pemancar dapat diterima oleh penerima ASK dengan baik. Adapun langkah-langkah untuk melakukan pengujian ini yaitu menentukan fungsi-fungsi dari penekanan keyboard pada laptop dan menentukan data yang akan dikirim untuk diolah penerima. Pada tabel 4.4 memperlihatkan fungsi penekanan keyboard pada laptop dan data yang akan dikirim ke penerima.
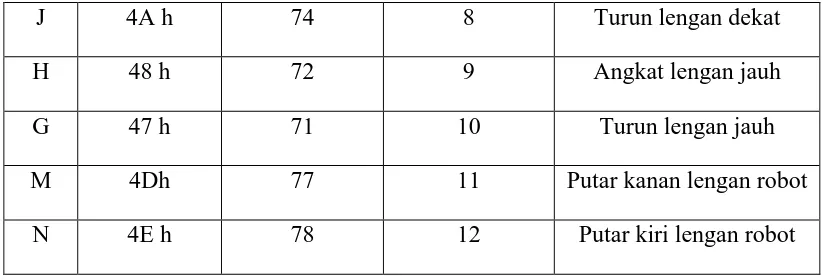
Tabel 4.4 Fungsi Penekanan Keyboad dan Data Yang Akan Dikirim
KEY Kode ASCII ( Hex )
Nilai ASCII ( Dec )
Nilai Konversi
Ke Program Fungsi Penekanan
J 4A h 74 8 Turun lengan dekat
H 48 h 72 9 Angkat lengan jauh
G 47 h 71 10 Turun lengan jauh
M 4Dh 77 11 Putar kanan lengan robot
N 4E h 78 12 Putar kiri lengan robot
Setelah menentukan fungsi dari tiap-tiap penekanan keyboard pada laptop dan menentukan data yang akan dikirim ke penerima, Tabel 4.5 memperlihatkan data yang diterima oleh penerima sekaligus reaksi yang akan dilakukan oleh rangkaian penerima sebelumnya setelah mengolah data tersebut.
Tabel 4.5 Data Yang Diterima dan Reaksi Pada Penerima
KEYBOARD
REAKSI PADA PENERIMA
W 1 1 Maju Lengan Robot
Listing Program Pengirim 4.4 ORG 00H JMP BEGIN
NILAI EQU 32H
MOV P3,#0FFH MOV P1,#00H SETB P1.4
INISIALSERIAL: MOV SCON,#50H ;pemilihan serial port MODE-1
MOV TMOD,#21H ;emilihan TIMER-1 pada MODE-2 (auto reload0
MOV PCON,#00H ;pemilihan SINGLE BAUDRATE MOV TCON,#50H ;aktifkan TIMER-1
MOV TH1,#0F4H ;F3 UNTUK penyetingan BAUTRATE 2400bps jika clock 12Mhz (0F4H jika clock 11,592Mhz)
MOV TL1,#0F3H ;mulai auto RELOAD
;======================BACA DATA DARI KEYBOARD====================
MULAI: JNB RI,$ ;BACA APAKAH ADA DATA YANGDIKIRIM DARI LAPTOP,JIKA YA LANJUT KE INSTRUKSI BERIKUTNYA
CLR RI
MOV A,SBUF ;AMBIL DATA YANG DI KIRIM OLEH LAPTOP DAN MUATI KE ACC
MOV NILAI,A MOV P0,NILAI
KIRIMDATA: MOV R7,#5 KIRIMLAGI: MOV P1,NILAI
CLR P1.4 CLR P1.4 CLR P1.4
ACALL DELAY20MS SETB P1.4
DJNZ R7,KIRIMLAGI SJMP BEGIN
;================================================================= DELAY20MS: MOV R3,#20
WAIT20MS: ACALL DELAY1MS DJNZ R3,WAIT20MS RET
;================================================================= DELAY1S: MOV R3,#20
WAIT1S: ACALL DELAY50MS DJNZ R3,WAIT1S RET
DELAY50MS: ;MOV TMOD,#01H ;MOV TCON,#10H MOV TH0,#3CH MOV TL0,#0AFH WAIT50MS: JBC TF0,FINISH50MS
SJMP WAIT50MS FINISH50MS: RET
;=================================================================DELAY1 MS: ;MOV TMOD,#01H
;MOV TCON,#10H MOV TH0,#0FCH MOV TL0,#17H WAIT1MS: JBC TF0,FINISH1MS
SJMP WAIT1MS FINISH1MS: RET
MOV TL0,#23H
WAIT105MS: JBC TF0,FINISH105MS SJMP WAIT105MS FINISH105MS: RET
END Listing Program Penerima 4.5
ORG 00H
JMP AWALROBOT
AWALROBOT: MOV P0,#00H MOV P1,#01FH MOV P2,#00H MOV P3,#00H CLR A
ACALL DELAY1S ACALL SERVOAWAL
BEGIN: MOV P0,#00H
JNB P1.4,$ ;PERIKSA APAKAH DATA TELAH SELESAI DI TERIMA
CLR P1.4 ;
MOV A,P1 ;BACA DATA YANG DI TERIMA DARI P1
;================UNTUK PENGGERAK ARAH ROBOT============ PROSES: CJNE A,#1,DATA2
ACALL MAJU SJMP BEGIN DATA2: CJNE A,#2,DATA3
ACALL BELOKKIRI SJMP BEGIN
DATA3: CJNE A,#3,DATA4
ACALL MUNDUR
SJMP BEGIN DATA4: CJNE A,#4,DATA7
ACALL BELOKKANAN SJMP BEGIN
;==================UNTUK PENGGERAK LENGAN=============== DATA7: CJNE A,#6,DATA8
ACALL ANGKATLENGAN ACALL ANGKATLENGAN ACALL ANGKATLENGAN SJMP BEGIN
DATA10: CJNE A,#8,DATA11
ACALL TURUNLENGAN SJMP BEGIN
DATA11: CJNE A,#12,DATA12 ACALL PUTARKIRI ACALL PUTARKIRI ACALL PUTARKIRI ACALL PUTARKIRI ACALL PUTARKIRI AJMP BEGIN
DATA12: CJNE A,#11,DATA13
ACALL PUTARKANAN ACALL PUTARKANAN ACALL PUTARKANAN AJMP BEGIN
DATA13: CJNE A,#10,DATA14
ACALL LENGANJAUH ACALL LENGANJAUH ACALL LENGANJAUH AJMP BEGIN
DATA14: CJNE A,#9,DATA15
ACALL LENGANDEKAT ACALL LENGANDEKAT ACALL LENGANDEKAT AJMP BEGIN
DATA15: CJNE A,#15,FINIS
;ACALL KAMERAAWAL FINIS: AJMP BEGIN
;=====================ROTASI LENGAN====================== PUTARKANAN: MOV R6,#1
PTRKANAN: SETB P0.3
ACALL DELAY1MS CLR P0.3
RET
;--- PUTARKIRI: MOV R5,#1
PTRKIRI: SETB P0.3
ACALL DELAY1MS ACALL DELAY1MS CLR P0.3
ACALL DELAY20MS DJNZ R5,PTRKIRI
RET
;======================POSISI LENGAN====================== ANGKAT LENGAN: MOV R6,#1
ANGKAT: SETB P0.2
ACALL DELAY1MS CLR P0.2
ACALL DELAY20MS DJNZ R6,ANGKAT
RET
;--- TURUN LENGAN: MOV R5,#1
TURUN: SETB P0.2
ACALL DELAY1MS ACALL DELAY1MS CLR P0.2
ACALL DELAY20MS DJNZ R5,TURUN
RET
;=======================JARAK LENGAN===================== LENGAN DEKAT: MOV R6,#1
DEKAT: SETB P0.1
CLR P0.1
ACALL DELAY20MS DJNZ R6,DEKAT
RET
;--- LENGAN JAUH: MOV R5,#1
JAUH: SETB P0.1
ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS ACALL DELAY1MS CLR P0.1
ACALL DELAY20MS DJNZ R5,JAUH
RET
;===========================PENJEPIT======================= SERVO BUKA: MOV R6,#1
BUKA: SETB P0.0
ACALL DELAY1MS CLR P0.0
ACALL DELAY20MS DJNZ R6,BUKA
RET
;--- SERVO JEPIT: MOV R5,#1
JEPIT: SETB P0.0
CLR P0.0
ACALL DELAY20MS DJNZ R5,JEPIT
ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS RET
ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS RET
;========================================================== MUNDUR: SETB P3.0 ;MUNDURKAN RODA KIRI
CLR P3.1
SETB P3.3
ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS RET
ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS ACALL DELAY50MS RET
;========================================================== SERVO AWAL: MOV R7,#15
AWAL: MOV P0,#0FH
ACALL DELAY105MS ;DELAY 1,5MS MOV P0,#00H
RET
;==========================================================DELA Y1S: MOV R3,#20
WAIT1S: ACALL DELAY50MS
DJNZ R3,WAIT1S RET
DELAY50MS: MOV TMOD,#01H
MOV TCON,#10H MOV TH0,#3CH MOV TL0,#0AFH WAIT50MS: JBC TF0,FINISH50MS
SJMP WAIT50MS FINISH50MS: RET WAIT1MS: JBC TF0,FINISH1MS
SJMP WAIT1MS FINISH1MS: RET
;========================================================== DELAY105MS: MOV TH0,#0FAH
MOV TL0,#23H
WAIT105MS: JBC TF0,FINISH105MS SJMP WAIT105MS FINISH105MS: RET
END
Pada driver motor DC memiliki 4 buah pin input, 4 buah pin output, dan 2 buah pin enable. Pengujian ini dilakukan dengan cara memberi inputan berupa logika “1” dan logika “0” pada masing-masing pin inputan secara bergantian kemudian dapat melihat perubahan arah gerak laju motor yang sebelumnya sudah disambungkan pada pin-pin output dari driver motor L298. Pada Tabel 4.6 memperlihatkan hasil pengujian modul driver motor DC.
Tabel 4.6 Hasil Pengujian Modul Driver Motor DC L298
INPUT OUTPUT STATUS DARI 2 MOTOR
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dalam perancangan pembuatan “RANCANG BANGUN LENGAN ROBOT TANPA KABEL BERBASIS MIKROKONTROLLER AT 89S52” dapat disimpulkan sebagai berikut:
1. Pada miniatur lengan robot ini masih memiliki kekurangan dalam hal kerja pada bagian mekanik lenganya, karena motor servo daya angkatya sangat lemah, sehingga semakin besar atau semakin berat beban yang diangkat oleh lengan robot maka semakin berkurangya kesetabilan pada lengan robot tersebut.
2. Komunikasi antara pengirim dengan penerima haya dapat dilakukan sampai jarak maksimal 13 meter.
5.2 Saran
Dalam perancangan alat ini masih memiliki beberapa kekurangan, maka disarankan untuk melakukan perbaikan dibeberapa tahap agar dapat lebih sempurna untuk kedepanya yaitu sebagai berikut:
1. Kususya menyangkut rancangan lengan ini, sebaikya menggunakan motor servo daya motor lebih besar agar mampu untuk mengangkat beban, dan mampu mengangkat lengan dengan lebih stabil.
2. kususya pada bodi dan lengan robot sebaikya gantikan dengan akrilik yang lebih tebal lagi, agar bodi dudukan pada lengan tidak goyang.
BAB 2
TINJAUAN PUSTAKA
2.1 Lengan robot
Lengan Robot adalah sebuah alat mekanik yang dapat melakukan tugas – tugas fisik yang berat, sehingga sangat menbantu pekerjaan manusia dalam melakukan hal – hal yang sangat berat untuk dikerjakan, dan sangat menghemat waktu untuk mengerjakan pekerjaan yang berat. Bukan hanya itu Robot juga dapat bekerja pada daerah – daerah yang berbahaya yang tidak diperbolehkan manusia untuk memasuki daerah tersebut.
2.2 Klasifikasi Umum Robot
Klasifikasi robot belum ada yang baku, tetapi berdasarkan beberapa sumber refrensi, robot dapat diklasifikasikan berdasarkan penggunaan aktuator, berdasarkan kebutuhan akan operator robot, dan berdasarkan kegunaannya. Penjelasan lebih detailnya sebagai berikut:
2.2.1 Klasifikasi Robot Berdasarkan Penggunaan Aktuator
Klasifikasi robot berdasarkan penggunaan aktuatornya yaitu manipulator dan mobile robot. Penjelasan lebih detail tentang manipulator dan mobile robot
sebagai berikut:
2.2.1.1 Manipulator
Gambar 2.1.
Pada manipulator terdapat sendi (joint) yang merupakan tempat sambungan lengan untuk melakukan putaran atau gerakan. Secara umum jenis sendi yang digunakan pada manipulator adalah sendi putar (revolute joint). Sendi putar sering digunakan sebagai pinggang (waist), bahu (shoulder) dan siku (elbow), dan pergerakan sendi putar akan menghasilkan satu derajat kebebasan.
Gambar 2.1 Manipulator robot
2.2.1.2 Mobile robot
Mobile robot merupakan sebuah robot yang dapat bergerak dengan leluasa
karena memiliki alat gerak untuk berpindah posisi. Secara umum dan mendasar sebuah mobile robot dibedakan oleh locomotion system atau sistem penggerak. Locomotion merupakan gerakan melintasi permukaan datar. Semua ini
disesuaikan dengan medan yang akan dilalui dan juga oleh tugas yang diberikan kepada robot. Berikut adalah klasifikasi robot menurut jenis locomotion.
a. Robot Beroda (wheeled car)
Robot yang seringkali dijumpai adalah robot yang bergerak dengan menggunakan roda. Roda merupakan teknik tertua, paling mudah, dan paling efisien untuk menggerakkan robot melintasi permukaan datar. Roda seringkali dipilih, karena memberikan traction yang bagus, mudah diperoleh dan dipakai, dan juga mudah untuk memasangnya pada robot. Traction merupakan variabel dari material roda dan permukaan yang dilintasi oleh roda. Material roda yang lebih lembut memiliki koefisien traction yang besar, dan koefisien traction yang besar ini member gesekan (friction) yang besar pula, dan memperbesar daya yang dibutuhkan untuk menggerakkan motor. Jumlah roda yang digunakan pada robot beragam, dan dipilih sesuai selera si pembuat robot. Robot dapat dibangun dengan menggunakan berbagai macam roda, misalnya beroda dua, beroda empat, beroda enam, atau beroda caterpillar (tank-treaded) yang dapat dilihat pada Gambar 2.2
(a) (b)
2.3. Klasifikasi Robot Berdasarkan Kebutuhan Akan Operator Robot
Klasifikasi robot berdasaarkan kebutuhan akan operator robot ada tiga jenis yaitu Autonomous robot, teleoperetad robot dan semi autonomous. Penjelasan tentang masing-masing jenis robot tersebut sebagai berikut.
2.3.1 Autonomous Robot
Robot Autonomous adalah robot yang dapat melakukan tugas-tugas yang diinginkan dalam lingkungan yang tidak terstruktur tanpa bimbingan manusia terus menerus berdasarkan logika-logika yang diberikan manusia kepada robot. Banyak jenis robot memiliki beberapa tingkat otonomi. Tingkatan otonomi sangat diinginkan dalam bidang-bidang seperti eksplorasi ruang angkasa, membersihkan lantai, memotong rumput, dan pengolahan air limbah. Salah satu contoh autonomous robot dapat dilihat pada Gambar 2.3.
Gambar 2.3 Autonomous robot
2.3.2 Teleoperetad Robot
Gambar 2.4 caterpillar robot dan remote control
2.4 Klasifikasi Robot Berdasarkan Kegunaan
Klasifikasi robot berdasarkan kegunaan yaitu robot industry (industrial robot) Penjelasan jenis robot industry.
2.4.1 Robot Industri (Industrial Robot)
Robot industri merupakan robot yang digunakan di dunia industri. Robot industri ini digunakan untuk otomatisasi proses produksi, misalnya untuk proses pengelasan (welding), perakitan dan pengepakan sesuatu barang. Pada Gambar 2.5 adalah robot industri yang digunakan dalam proses pengelasan.
2.5 Struktur Umum Robot
Secara umum struktur robot memiliki badan (body), lengan (arm), pergelangan (wrist), ujung (end effector), penggerak (actuator), sensor, pengendali (controller) dan catu daya (power supply). Penjelasan lebih detail tentang struktur umum robot sebagai berikut.
2.5.1 Lengan (arm)
Lengan robot merupakan komponen robot yang memiliki fungsi untuk melakukan pergerakan robot. Gambar 2.6 adalah lengan robot (arm robot) dan lengan pada humanoid robot.
Gambar 2.6 Lengan robot 2.5.2 Pergelangan (wrist)
Pergelangan pada robot berfungsi untuk menghubungkan lengan robot dengan end effector. Gambar 2.7 menunjukan pergelangan (wirst) pada arm robot.
2.5.3 Ujung (end effector)
End effector berfungsi sebagai bagian terakhir yang menghubungkan
antara manipulator dengan objek yang akan dijadikan kerja dari robot. End effector jika disamakan dengan manusia seperti jari-jari tangan yang dapat
digerakkan untuk memindah atau mengangkat material ataupun peralatan yang dapat digunakan untuk mengelas, mengecat, menempa, mengisi botol dan lain-lain sesuai dengan kebutuhan. Bentuk efektor banyak memiliki banyak jenis, salah satunya adalah gripper. Gambar 2.8 menunjukan end effector pada arm robot dan humanoid robot.
Gambar 2.8 End effector arm robot
2.6 Motor Penggerak 2.6.1 Pengertian Motor
(a) (b)
Gambar 2.9 (a) motor DC, (b) motor servo
Dalam mengendalikan motor-motor tersebut, otak robot tidak dapat langsung mengakses motor, kecuali motor servo yang sudah memiliki antarmuka. Namun demikian, dengan menggunakan antarmuka servo controller, maka proses pengendalian motor servo akan lebih mudah dilakukan.
2.6.1.1Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Motor arus searah, sebagaimana namanya, menggunakan arus langsung. Dalam perancangan ini motor DC berfungsi sebagai penggerak roda dengan arah putaran sesuai dengan arah jarum jam dan juga berlawanan arah jarum jam sesuai dari masukan driver motor DC yang telah di kendalikan oleh mikrokontroler. Pada Gambar 2.10 menunjukkan bentuk dari motor DC yang di gunakan dalam perancangan ini.
2.6.1.2 Motor Servo (Servomotor)
Servomotor adalah sebuah motor dengan sistem closed feedback di mana
posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam servomotor. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1,5 ms pada periode selebar 2 ms maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Servomotor biasanya hanya bergerak mencapai sudut tertentu saja dan
tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, Servomotor dapat dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagian-bagian lain yang mempunyai gerakan terbatas. Servomotor adalah motor yang mampu bekerja dua arah, yaitu searah jarum jam cloackwise (CW) dan berlawanan arah jarum jam countercloackwise (CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM (Pulse Width Modulation) pada bagian pin kontrolnya.
Servomotor merupakan sebuah motor DC yang memiliki rangkaian kontrol
elektronik dan internal gear untuk mengendalikan pergerakan dan sudut angularnya. Sistem mekanik pada servomotor, seperti yang ditunjukan pada Gambar 2.11 memiliki :
a. 3 jalur kabel : power, ground, dan control b. Sinyal kontrol mengendalikan posisi
c. Operasional dari servomotor dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0,5 ms dan 2 ms menyatakan akhir dari range sudut maksimum.
Gambar 2.11 Sistem mekanik servomotor Jenis-jenis servomotor diantaranya adalah sebagai berikut: a. Servo motor Standar 180°
Servomotor jenis ini hanya mampu bergerak dua arah (CW dan CCW)
dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
b. Servo motor Continuous
Servomotor jenis ini mampu bergerak dua arah (CW dan CCW) tanpa
batasan defleksi sudut putar (dapat berputar secara kontinyu). Adapun Prinsip kerja Motor Servo ialah sebagai berikut:
Gambar 2.12 Timing Diagram Pengendalian Servo Motor
Ketika lebar pulsa kendali telah diberikan, maka poros servo motor akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka servo motor akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun servo motor tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms untuk menginstruksikan agar posisi poros servo motor tetap bertahan pada posisinya.
2.7 Encoder HT12E
HT12E adalah hardware yang memiliki fungsi sebagai encoder. IC HT12E disini digunakan sebagai encoder yang terhubung dengan transmitter TLP433 yang berfungsi untuk mengubah addres dan data paralel ke data serial. IC HT12E memiliki 8-address dan 4-address/data input. Data input yang berupa 4 buah data biner yang akan dikodekan menjadi data serial sehingga data dapat ditransmisikan
Gambar 2.13 Konfigurasi Pin Pada HT12E
2.8 Decoder HT12D
HT12D adalah hardware yang memiliki fungsi sebagai decoder. IC HT12D disini digunakan sebagai decoder yang terhubung dengan reccieverd RLP 433 yang berfungsi untuk mengubah addres dan data serial ke data paralel. Data yang di terima oleh RLP433 yang secara serial akan dikodekan menjadi bentuk biner 4-bit output. Pada Gambar 2.14 adalah menunjukan kofigurasi pin pada IC HT12D.
2.9 Modul Driver Motor DC
Rangkaian modul driver motor DC adalah rangkaian yang berfungsi untuk mengendali motor DC yang menghasilkan keluaran putaran motor yang dapat berputar searah jarum jam dan berlawanan arah jarum jam. Dalam modul ini digunakan IC L298 yang berisi dua rangkaian H-Bridge. Gambar 2.15 menunjukkan bentuk dari modul driver motor DC.
Gambar 2.15 Modul Driver Motor DC
2.10 Driver /Receiver RS-232 MAX-232
Gambar 2.16 Susunan penyemat dan diagram blok chip MAX-232.
RS-232 adalah standard komunikasi serial antar periperal-periperal, biasa juga disebut dengan jalur I/O ( input / output ),dalam sistem ini RS232 berfungsi untuk mengirim data hasil pengukuran ke PC.
Karakteristik RS 232 adalah sebagai berikut:
1. Sebuah ‘spasi’ (logika 0) antara tegangan +3 s/d +25 volt. 2. Sebuah ‘tanda’ (logika 1) antara tegangan -3 s/d -25 volt. 3. Daerah tegangan antara +3 s/d -3 volt tidak didefenisikan.
4. Tegangan rangkaian terbuka tidak boleh lebih dari 25 volt (dengan acuan ground).
2.11 Port Komunikasi Serial
Komunikasi serial membutuhkan port sebagai saluran data. Berikut tampil port serial DB9 yang umum digunakan sebagai port serial.
Gambar 2.17 Port DB9 jantan
Gambar 2.18 Port DB9 betina
Gambar 2.19 susunan PIN konektor DB9 Tabel 2.1 Fungsi Susunan Konektor DB9
Pin Nama Signal Fungsi
2 RXD Sinyal data dari modem ke PC (Penerimaan). 3 TXD Sinyal data dari PC ke modem (Pengiriman). 4 DTR Data Terminal Ready, sinyal kendali dari PC ke
modem, untuk mengaktifkan modem. 5 GND Sinyal Ground
6 DSR Data Set Ready, sinyal kendali dari modem ke PC yang menyatkan bahwa modem siap mengirim atau menerima data.
7 RTS Request To Send, sinyal kendali dari PC yang menandakan bahwa PC siap menerima data 8 CTS Clear To Send, sinyal kendali dari modem yang
menandakan bahwa modem siap menerima data. 9 RI Ring Indicator, sinyal kendali ke PC, tanda bahwa
saluran telepon berdering.
2.12 Mikrocontroller AT89S52
Penggunaan IC AT89S52 memiliki beberapa keuntungan dan keunggulan, antara lain kemudahan dalam pemrograman dan hemat dari segi biaya. IC AT 89S52 memiliki program internal yang mudah untuk dihapus dan diprogram kembali secara berulang – ulang. Pada suatu alat yang menggunakan IC AT 89S52 berfungsi sebagai sentral control dari segala aktivitas alat tersebut. Mulai dari timer untuk mengontrol lamanya bekerja.
Tabel 2.2 Kapasitas Memori Mikrokontroler seri AT89XX
Type RAM Flash Memory EEPROM
AT89C51/AT89S51 8 X 128 byte 4 Kbyte Tidak AT89C52/AT89S52 8 X 256 byte 8 Kbyte Tidak AT89C55 8 X 256 byte 20 Kbyte Tidak AT89S53 8 X 256 byte 12 Kbyte Tidak AT89S8252 8 X 256byte 8 Kbyte 2Kbyte
Mikrokontroler AT89S52 memiliki fasilitas-fasilitas pendukung yang membuatnya menjadi mikrokontroler yang sangat banyak digunakan dalam berbagai aplikasi. Fasilitas-fasilitas yang dimiliki oleh mikrokontroler AT89S52 adalah:
1. Sesuai dengan produk-produk MCS-51.
2. Terdapat memori flash yang terintegrasi dalam sistem. Dapat ditulis ulang hingga 1000 kali
3. Beroperasi pada frekuensi 0 sampai 24MHz. 4. Tiga tingkat kunci memori program.
5. Memiliki 256 x 8 bit RAM internal.
6. Terdapat 32 jalur masukan/keluaran terprogram. 7. Tiga pewaktu atau pencacah 6-bit
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Belakangan ini teknologi robot banyak digunakan di dunia industri untuk
melakukan proses produksi. Dalam kehidupan sehari-hari, kita juga sudah sering
melihat didalam dunia industri, dunia medis bahkan, sudah hampir semua
menggunakan robot. Pada dunia medis, mereka menggunakan robot untuk
membantu dokter dalam pengobatan. Pada dunia industri robot digunakan untuk
mengerjakan pekerjaan yang tidak dapat dikerjakan oleh manusia.
Tidak sedikit juga yang menggunakan lengan robot untuk mengangkat
suatu alat berat dalam suatu proyek. Dan teryata banyak juga yang belum
menggunakan remote control, hanya menggunakan tombol pada lengan robot
tersebut sehingga masih sangat berbahaya pada keselamatan para pekerja.
Berdasarkan hal tersebut, maka timbul suatu ide bagi kami untuk merancang
dan membuat suatu alat yang juga merupakan tugas akhir kami yang berjudul:
1.2 Rumusan Masalah
Berdasarkan rumusan masalah dari rancang bangun lengan robot ini adalah :
1. Membuat program aplikasi delpi, agar lengan robot dapat dikendalikan
melalui Laptop.
2. Mengatur gerak lengan robot agar dapat dikendalikan sesuai dengan tempat
benda yang akan diambil.
3. Bagaimana cara memanfaatkan laptop supaya menjadi remot control.
1.3 Batasan Masalah
Mengingat keterbatasan kemampuan penulis dan keterbatasan referensi serta
terbatasnya waktu pelaksanaan maka penulis membatasi masalah yang akan
dibahas. Batasan masalahnya adalah :
1. Lengan Robot hanya dapat menngambil barang dari sudut kiri, tengah dan
kanan.
2. Lengan Robot menggunakan bahan akrilik yang sangan tipis berdia meter
ketabalan 2 mm hal ini membuat lengan robot sangat rapuh.
1.4 Tujuan penelitian
Adapun tujuan penelitian dari penulisan skripsi ini adalah sebagai berikut:
1. Mampu merancang atau mendesain keseluruhan lengan robot.
1.5 Manfaat Penelitian
Adapun manfaat dari penelitian pembuatan lengan robot ini adalah :
1. Lengan robot ini, dapat menjadi sumber kajian dalam pembuatan tugas
akhir mahasiswa.
Sistem pembahasan yang dilakukan sebelumnya dituangkan ke dalam karya ilmiah ini dengan sistem penyusunan Tugas akhir ini adalah sebagai berikut :
BAB 1. PENDAHULUAN
Bab I ini berisi latar belakang, rumusan masalah, batasan masalah, tujuan dan manfaat, metode pengumpulan data, serta sistematika penyusunan Tugas Akhir.
BAB 2. LANDASAN TEORI
Pada bab II ini dibahas tentang komponen pendukung seperti Mikrokontroler AT89S52, TLP dan RLP (sebagai rangkaian penerima dan pengirim data dari laptop ke mini robotik), Motor Servo, dll.
BAB 3. PERANCANGAN DAN PEMBUATAN
Pada bab III ini dibahas mengenai perancangan blok diagram dari perancangan alat - alat yang akan digunakan.
BAB 4. PENGUJIAN ANALISA
Pada bab IV ini membahas pengujian dan analisa tiap-tiap blok seperti rangkaian mikrokontroler dll.
BAB 5. KESIMPULAN DAN SARAN
ABSTRAK
Pada pembuatan Tugas Akhir ini dirancang suatu mini robotik berlengan
yang dibuat dari sebuah treck mainan bertujuan untuk memindahkan
barang-barang yang berbahaya seperti zat radio aktif dan lain-lain.
Selain untuk memindakan barang-barang yang berbaya, sistem ini
dirancang untuk menggerakkan Lengan Robot seperti belok kiri, belok kanan,
maju dan mundur. Lengan yang dirancang bukan hanya untuk memindahkan
barang-brang dari depan motor saja, tapi lengan tersebut dapat berputar ke kiri dan
ke kanan sehingga dapat memindahkan barang-barang tersebut dari setiap bagian
yang ada di dekat mini robotik.
Sistem ini dirancang menggunakan komponen-komponen yang terdiri atas
rangkaian penggerak mini Lengan Robot, rangkaian penggerak terdiri dari motor
servo, sistem minimum microcontroler, rangkaian untuk transmitter dan
rangkaian untuk receiver. Rangkaian transmitter tersebut akan mengirimkan
perintah, yang telah di program dari sistem minimum microcontroller ke
rangkaian receiver untuk menggerakkan Lengan Robot dan Motor DC. Rangkaian
transmitter dan receiver tersebut dirancang dengan menggunakan modul ASK.
Dalam rancangan ini dibuat labtop sebagai pengendali dalam pergerakkan
lengan Robot. Di dalam Labtop juga dibuat sebuah sistem minimum bertujuan
ABSTRACT
In making this final project designed a robotic mini sleeves are made of a treck toy aims to move dangerous goods such as radioactive substances and others.
In addition to memindakan dangerous goods, the system is designed to move the robot arm such as turn left, turn right, forward and backward. The arms are designed not only for goods to move from the front of the bike, but the arm can rotate to the left and to the right so that it can move these items from each section near the mini robotic.
These systems are designed using components that consist of a series of mini-Arm Robot driving, driving circuit consists of a servo motor, the minimum system microcontroler, the circuit for the transmitter and receiver circuit for. The transmitter will send a series of commands, which have been on the program of the minimum system microcontroller to the receiver circuit to drive the robot arm and DC motors. The transmitter and receiver circuits designed using ASK module.
SKRIPSI
140821001
EMAN GUNANTA. PC
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETUAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
RANCANG BANGUN LENGAN ROBOT TANPA KABEL
BERBASIS MIKROKONTROLLER AT 89S52
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar sarjana sains
140821001
EMAN GUNANTA. PC
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETUAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : RANCANG BANGUN LENGAN ROBOT TANPA KABEL BERBASIS
MIKROKONTROLLER AT 89S52. Kategori : Skripsi
Nama : EMAN GUNANTA. PC
NIM : 140821001
Program Studi : Sarjana (S1) Fisika
Departemen Fisika
Fakultas : Matematika dan ilmu pengetahuan alam ( FMIPA ) Universitas Sumatra Utara
Disetujui di Medan, Januari 2017
Disetujuin oleh
Departemen Matematika FMIPA USU Pembimbing 1 Ketua,
PERNYATAAN
RANCANG BANGUN LENGAN ROBOT TANPA KABEL
BERBASIS MIKROKONTROLLER AT 89S52
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya sendiri. Terkecuali ada beberapa kutipan dan ringkasan yang masing – masing disebutkan sumberya.
Medan, Februari 2017
PENGHARGAAN
Puji dan syukur penulis ucapkan kepada TUHAN YANG MAHA ESA, karena berkat rahmat dan karunia-Nya laporan tugas akhir ini dapat diselesaikan. Dengan Laporan tugas akhir yang berjudul “ RANCANG BANGUN LENGAN ROBOT TANPA KABEL BERBASIS MIKROKONTROLLER AT 89S52”
Dalam pembuatan laporan Tugas Akhir ini, penulis banyak menghadapi masalah dan kesulitan, namun berkat bimbingan dan bantuan dari beberapa pihak baik berupa mental, informasi, segi administrasi dan Doa. Oleh karena itu, sudah selayaknya penulis mengucapkan terima kasih kepada :
1. Bapak Drs. Kurnia Brahmana,M.Si selaku dosen pembimbing yang telah banyak meluangan waktu, memberikan panduan dan masukan kepada penulis untuk menyempurnakan laporan skripsi ini.
2. Bapak Prof. Dr. Marhaposan Situmorang selaku Kepala Departemen Fisika Universitas Sumatera Utara.
3. Bapak Drs. Herli Ginting, MS selaku Kepala Program Studi S-1 Fisika Ekstensi Universitas Sumatera Utara.
4. Bapak Johaiddin Saragih,M.Si, yang selalu membantu kami mengurus segala keperluan berkas kami.
5. Dan buat kedua Orang Tua saya yang selalu memberikan dukungan, perhatian, dalam penulisan skripsi ini sampai selesai.
6. Seluruh Dosen/ Staf pengajar pada program studi fisika Ekstensi.
7. Semua pihak yang terlibat langsung atau pun tidak langsung yang tidak dapat penulis ucapkan satuper satu yang telah membantu penyelesaian skripsi ini.
guna penyempurnaan Tugas Akhir ini. Akhir kata penulis berharap kiranya laporan ini bermanfaat bagi kita semua.
Medan, Februari 2017
Penulis
EMAN GUNANTA PC
ABSTRAK
Pada pembuatan Tugas Akhir ini dirancang suatu mini robotik berlengan
yang dibuat dari sebuah treck mainan bertujuan untuk memindahkan
barang-barang yang berbahaya seperti zat radio aktif dan lain-lain.
Selain untuk memindakan barang-barang yang berbaya, sistem ini
dirancang untuk menggerakkan Lengan Robot seperti belok kiri, belok kanan,
maju dan mundur. Lengan yang dirancang bukan hanya untuk memindahkan
barang-brang dari depan motor saja, tapi lengan tersebut dapat berputar ke kiri dan
ke kanan sehingga dapat memindahkan barang-barang tersebut dari setiap bagian
yang ada di dekat mini robotik.
Sistem ini dirancang menggunakan komponen-komponen yang terdiri atas
rangkaian penggerak mini Lengan Robot, rangkaian penggerak terdiri dari motor
servo, sistem minimum microcontroler, rangkaian untuk transmitter dan
rangkaian untuk receiver. Rangkaian transmitter tersebut akan mengirimkan
perintah, yang telah di program dari sistem minimum microcontroller ke
rangkaian receiver untuk menggerakkan Lengan Robot dan Motor DC. Rangkaian
transmitter dan receiver tersebut dirancang dengan menggunakan modul ASK.
Dalam rancangan ini dibuat labtop sebagai pengendali dalam pergerakkan
lengan Robot. Di dalam Labtop juga dibuat sebuah sistem minimum bertujuan
ABSTRACT
In making this final project designed a robotic mini sleeves are made of a treck toy aims to move dangerous goods such as radioactive substances and others.
In addition to memindakan dangerous goods, the system is designed to move the robot arm such as turn left, turn right, forward and backward. The arms are designed not only for goods to move from the front of the bike, but the arm can rotate to the left and to the right so that it can move these items from each section near the mini robotic.
These systems are designed using components that consist of a series of mini-Arm Robot driving, driving circuit consists of a servo motor, the minimum system microcontroler, the circuit for the transmitter and receiver circuit for. The transmitter will send a series of commands, which have been on the program of the minimum system microcontroller to the receiver circuit to drive the robot arm and DC motors. The transmitter and receiver circuits designed using ASK module.
DAFTAR ISI
Halaman
Persetujuan………..……….i
Peryataan………...……….…………ii
Penghargaan……….……….iii
Abstrak……….…..……….v
Daftar isi……….………...……...vii
Daftar Gambar………..……….xi
Daftar Tabel……….…………xiii
BAB 1 PENDAHULUAN 1.1 Latar Belakang……….1
1.2 Rumusan Masalah………...……….2
1.3 Batasan Masalah………..2
1.4 Tujuan Penelitian……….2
1.5 Manfaat Penelitian………...2
1.6 Sistematika Penyusunan Tugas Akhir……….2
BAB 2 TINJAUAN PUSTAKA 2.1 Lengan Robot…...………...………...4
2.2.1 Klasifikasi Robot Berdasarkan Penggunaan Aktuator...4
2.2.1.1 Manipulator………...4
2.2.1.2 Mobile Robot……….6
2.3 Klasifikasi Robot Berdasarkan Kebutuhan Operator Robot……….……...7
2.3.1 Autonomoous Robot……….7
2.3.2 Teleoperetad Robot………...7
2.4 Klasifikasi Robot Berdasarkan Kegunaan………...8
2.4.1 Robot Industri ( Industrial Robot )………...8
2.5 Struktur Umum Robot……….9
2.5.1 Lengan ( arm )………..…….……….……..9
2.5.2 Pergelangan ( wrist )……….9
2.5.3 Ujung ( end effector )………...……..10
2.6 Motor Penggerak...…...……….10
2.6.1 Pengertian Motor………...……….10
2.6.1.1 Motor DC……….11
2.6.1.2 Motor Servo ( ServoMotor )……...……….12
2.7 Encoder HT12E………..………...14
2.8 Decoder HT12D...………...……….15
2.9 Modul Driver Motor DC………16
2.10 Driver / Receiver RS – 232, MAX – 232………16
2.11 Port Komunikasi Serial…………..………..18
BAB 3 PERANCANGAN SISTEM
3.1 Diagram Blok Sistem……….21 3.1.1 Penjelasan Dari Setiap Diagram Blok Sistem Diatas…...……..22 3.2 Perancangan Rangkaian Tiap Blok………...……….23 3.2.1 Perancangan Rangkaian Catu Daya………23 3.2.2 Rangkaian Sistem Minimum Mikrokontroller AT89S52…...24 3.2.3 Perancangan Rangkaian Modul Pemancar Dengan AT89S52...25 3.2.4 Perancangan Hubungan Modul Penerima RLP 433
Dengan AT8S52………..………...26 3.2.5 Rangkaian Module Penggerak Motor DC Dengan Driver
L298 dan AT89S52…….………...27 3.2.6 Perancangan Rangkaian Penggerak Motor Servo………...28 3.3 Perancangan Perangkat Lunak………...29 3.3.1 Diagram Alur Program Utama Untuk Pengirim ( Transmitter ).30 3.3.2 Diagram Alur Program Utama Untuk Reseiver…….………….31
BAB 4 PENGUJIAN DAN HASIL
4.1 Pengujian Sistem Robot……….32 4.1.1 Pengujian Sistem Mikrokontroller AT89S51 Secara Manual…………32 4.1.2Pengujian Data Serial Dari Labtop Ke Mikro AT89S52 Yang
4.1.5 Pengujian Driver Motor DC L298………..52
BAB 5 KESIMPULAN DAN SARAN
DAFTAR GAMBAR
Halaman
Gambar 2.1 Manipulator robot ...5
Gambar 2.2 Robot beroda dua (a) dan robot beroda caterpillar (b)...6
Gambar 2.3 Autonomous robot...7
Gambar 2.4 caterpillar robot dan remote control...…..8
Gambar 2.5 Robot industry...8
Gambar 2.6 Lengan robot...9
Gambar 2.7 Pergelangan robot...9
Gambar 2.8 End effector arm robot...10
Gambar 2.9 (a) motor DC, (b) motor servo...11
Gambar 2.10 Motor DC...11
Gambar 2.11 Sistem mekanik servomotor...13
Gambar 2.12 Timing Diagram Pengendalian Servo Motor...14
Gambar 2.13 Konfigurasi Pin Pada HT12E...15
Gambar 2.14 Konfigurasi Pin Pada HT12D...15
Gambar 2.15 Modul Driver Motor DC...16
Gambar 2.17 Port DB9 jantan...18
Gambar 2.18 Port DB9 betina...18
Gambar 2.19 susunan PIN konektor DB9...18
Gambar 2.20 Konfigurasi Pin Pada Mikrokontroler AT89S52...19
Gambar 3.1 Blok Diagram systim Pengirim...21
Gambar 3.2 Blok Diagram systim Penerima...…...21
Gambar 3.3 pengkoplingan catu daya...23
Gambar 3.4 Rangkaian Sistem Minimum AT89S52...24
Gambar 3.5 Rangkaian Modul Pemancar...25
Gambar 3.6 Rangkaian Modul HT12D Dengan AT89S52...26
Gambar 3.7 Rangkaian Pengendali Motor DC dengan Driver L298...27
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Susunan Konektor DB9………...18
Tabel 2.2 Kapasitas Memori Mikrokontroler seri AT89XX...20
Tabel 3.2 akses masukan dan keluaran pada microcontroller AT89S52, untuk penerima data...29
Tabel 3.1 akses masukan dan keluaran pada mikrocontroller AT89S52, Untuk Pengiriman...29
Tabel 4.1 hasil pengujian rangkaianmikrokontroller….…..……….32
Tabel 4.2 Data Yang di Kirim dan Yang diterima ditampilakan pada led...35
Tabel 4.3 Data Yang di Kirim Dari limit switch dan perintah pada motor servo……….………...41
Tabel 4.4 Fungsi Penekanan Keyboad dan Data Yang Akan Dikirim…...…41
Tabel 4.5 Data Yang Diterima dan Reaksi Pada Penerima………..….42