ABSTRAK
APLIKASIMODEL REFERENCE ADAPTIVE CONTROL(MRAC) UNTUK PENGENDALIAN SUHU RUANG BIOREAKTOR PADA MODEL SISTEM
PENGOLAHAN LIMBAH B3 Oleh
HAKI MIDIA ALIMAN HAKIM
Terdapat sebuah model pengolahan limbah Bahan Berbahaya dan Beracun (B3), model tersebut dibangun guna mengetahui cara pengelolaan dan pengolahan limbah yang baik oleh biomassa alga (absorben) agar menghasilkan konsentrasi bahan berbahaya dan beracun (polutan) yang sesuai dengan standar baku mutu. Salah satu tahapan proses yang penting pada pengolahan ini adalah pada ruang bioreaktor, karena pada tahap ini terjadi penyerapan polutan paling besar. Kondisi suhu pada ruang bioreaktor merupakan salah satu parameter penting yang harus dijaga agar proses penyerapan dapat maksimal. Proses ini tergolong proses dinamik, sehingga diperlukan sebuah sistem yang dapat mempertahankan suhu ruang bioreaktor meskipun terjadi perubahan karakteristik proses akibat faktor luar. Sistem kendali yang digunakan pada model adalah kendalion-offcelah differensial. Mengetahui hal tersebut maka pada tugas akhir ini akan diaplikasikan Model Reference Adaptive Control (MRAC) sehingga kondisi suhu pada proses adsorbsi dapat dipertahankan meskipun terjadi perubahan karakteristik proses yang disebabkan oleh faktor luar. Hasil pengujian bump-test menunjukkan bahwa konstanta waktu proses sebesar 1320 detik, gain adaptasi yang sesuai dengan karakteristik proses tersebut adalah 0,005-0,01. Pengujian unjuk kerja sistem dilakukan dengan memberikan gangguan dengan cara memasukkan udara lingkungan ke ruang bioreaktor menggunkan kipas inlet, hasil pengujian kalang terbuka menunjukkan bahwa gangguan dapat menurunkan suhu sebesar 2,66ºC dalam waktu 36 menit. Saat menggunakan MRAC dengan gain adaptasi 0,005 gangguan maksimum yang dihasilkan sebesar 1,64 ºC dengan waktu mengatasi gangguan sebesar 6240 detik. Saat gain adaptasi 0,01 gangguan maksimum yang dihasilkan sebesar 1,42 ºC dengan waktu mengatasi gangguan sebesar 4600 detik. Sehingga dengan hasil ini dapat disimpulkan bahwa aplikasi MRAC pada pengendalian suhu ruang bioreaktor menunjukkan kinerja yang baik.
ABSTRACT
APPLICATION OF MODEL REFERENCE ADAPTIVE CONTROL (MRAC) FOR ROOM TEMPERATURE CONTROL MODEL BIOREACTOR B3 WASTE
TREATMENT SYSTEM By
HAKI MIDIA ALIMAN HAKIM
There is a model of waste treatment Bahan Berbahaya dan Beracun (B3) or Hazardous and Toxic Materials, the model was built in order to know how the management and the good waste treatment by algal biomass (absorbent) to produce concentrations of hazardous and toxic substances (pollutants) in accordance with quality standard. One of the important process steps in this processing is the bioreactor chamber, because at this stage there is the greatest pollutant absorption. Temperature conditions in the bioreactor chamber is one of the important parameters that must be maintained for the maximum absorption process. This is a dynamic process, so we need a system that can maintain the temperature of the bioreactor space despite the changes in the characteristics of the process due to external factors. Control systems used in the model are the on-off controler of the differential gap. Knowing that the final project will be applied by Model Reference Adaptive Control (MRAC) so that the temperature conditions in the adsorption process can be maintained despite the change in the characteristics of the process caused by external factors. The results test showing that bump-testing process with time constant of 1320 seconds, the gain adaptation in accordance with the characteristics of the process is from 0.005 to 0.01. Testing the performance of the system is done by providing the interference by entering the bioreactor chamber to the ambient air using the fan inlet, open loop test results indicate that the disorder can lower the temperature by 2,66ºC in 36 minutes. When using the MRAC with 0,005 adaptation gain maximum interference generated by 1.64 ºC with a time of 6240 seconds overcome interference. When the adaptation gain maximum interference generated 0.01 of 1.42 ºC by the time of 4600 seconds overcome interference. So from the results, it can be conclude that the implementation of MRAC at room temperature controlling bioreactor showed a good performance.
APLIKASI MODEL REFERENCE ADAPTIVE CONTROL (MRAC) UNTUK PENGENDALIAN SUHU RUANG BIOREAKTOR PADA
MODEL SISTEM PENGOLAHAN LIMBAH B3
Oleh:
Haki Midia Aliman Hakim
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Program Studi Teknik Elektro Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
APLIKASI MODEL REFERENCE ADAPTIVE CONTROL (MRAC) UNTUK PENGENDALIAN SUHU RUANG BIOREAKTOR PADA
MODEL SISTEM PENGOLAHAN LIMBAH B3 COVE
(Skripsi)
Oleh
Haki Midia Aliman Hakim
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
Moto
Pada akhirnya kita akan berada pada suatu tempat
dimana didalamnya tidak ada satupun kebaikan ATAU
suatu tempat dimana didalamnya tidak ada sedikitpun
keburukan.
PERSEMBAHAN
Segala puji bagi Allah, Tuhan semesta alam.
Karya Tulis ini kupersembahkan untuk :
Bangsa dan Negaraku
Dengan dedikasi yang sesungguh-sungguhnya sebagai
putramu
Terima kasih kepada :
Orang tua serta adik-adikku
Ora
ng tua yang selalu mendo’akanku
Orang tuaku pula (guru dan dosen)
Orang tua yang selalu mengajar dan mendidikku
Terima kasih kepada saudaraku (sahabat)
RIWAYAT HIDUP
Haki Midia Aliman Hakim, Tri Murjo, 16 Juli 1993. Anak pertama dari tiga bersaudara dari pasangan Bapak Syahbudin dan Ibu Siti Khomsah.
Pendidikan Sekolah Dasar (SD) di SD N 1 Braja Sakti, Way Jepara, Lampung Timur. Suasana kanak-kanaknya menuntun mimpinya untuk menjadi seorang ilmuan, dan lain hari ingin menjadi seorang astronout.
Sekolah Lanjut Tingkat Pertama (SLTP) di SLTP N 1 Way Jepara, Lampung Timur. Kelabilan remaja pada waktu itu sempat menghapuskan segala mimpi yang ada sejak bangku Sekolah Dasar. Padanya mulai terjadi proses berfikir tentang arti kehidupan.
Sekolah Menengah Atas (SMA) di SMA N 1 Way Jepara, Lampung Timur. Proses berfikir pada dirinya sudah semakin berkembang seiring bertambahnya umur, melihat dan menerjemahkan apa yang dia lihat disekelilingnya. Membuat dia yakin akan mimpinya, mengubah mimpi kanak-kanaknya, seorang Menteri Pendidikan.
Universitas Lampung sebagai tingkat lanjutan masa pembelajarannya. Dia menemukan keluarga bernama HIMATRO (Himpunan Mahasiswa Teknik Elektro). Ia memfokuskan diri pada teknik pengendalian. Saat menjadi mahasiswa cara berfikirnya pun makin matang meskipun masih banyak kekurangan, namun mimpi masih sama dan semakin kuat, Menteri Pendidikan.
SANWACANA
Segala puji bagi Allah, Tuhan semesta alam. Segala rasa syukur atas rahmat dan berkat-Nya sehingga penulis mendapatkan kesempatan melajutkan masa pembelajarannya sampai ke bangku perkuliahan. Sebuah kesempatan yang tidak Allah berikan kepada setiap umatnya. Skripsi dengan judul “Aplikasi Model Reference Adaptive Control (MRAC) untuk Pengendalian Suhu Ruang Bioreaktor Pada Model Sistem Pengolahan Limbah B3” telah selesai dikerjakan, dengan penuh kesabaran dan keseriusan sebagai bentuk kesungguhan dalam mensyukuri nikmat dari Alah S.W.T. Skripsi yang menjadi salah satu syarat untuk memperoleh gelar Sarjana Teknik pada Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung.
1. Kedua orang tua penulis, Bapak Syahbudin dan Ibu Siti Khomsah Atas segala yang telah dicurahkan kepada anaknya.
2. Bapak dan ibu dosen yang telah memberikan ilmu dan wawasan selama penulis menimba ilmu di Jurusan Teknik Elektro Universitas Lampung. 3. Bapak Agus Trisanto, Ph.D. selaku Ketua Jurusan Teknik Elektro serta
pembimbing utama skripsi
4. Ibu Herlinawati, S.T., M.T., selaku Sekretaris Jurusan Teknik Elektro Universitas Lampung.
5. Dr. Ir. Sri Ratna Sulistiyanti., M.T. selaku Dosen Pembimbing Pendamping atas kesediaan, arahan, saran, serta dorongan semangat dalam proses penyelesaian skripsi ini.
6. Bapak Prof. Drs. Suharno, M.Sc., Ph.D. selaku Dekan Fakultas Teknik Universitas Lampung.
7. Bapak Raden Arum Setia Priyadi, S.Si., M.T selaku Pembimbing Akademik 8. Bapak Ir. Emir Nasrullah., M.Eng. selaku Dosen Penguji yang telah berkenan
memberikan masukan, kritik, dan saran dalam penyelesaian skripsi ini.
9. Sahabat, saudara, dan kawan seperjuangan mahasiswa Jurusan Teknik Elektro
’10: Jaya, Anwar, Derry, Reza, Joelisca, Budi, Ipin, Danny, Muthe, Kiki,
10. Ka Cipo, Ka Koko, Ka Agung, Ka Ijonk, Bang HH, KA Ridho, Penceng, Dirya, Restu, Kotjong, Irul, Kakek, Bang Cing, dan rekan-rekan laboratorium yang selalu menemani di Laboratorium.
11. Kakak-kakak angkatan 2008, 2009, 2007 serta adik-adik angkatan 2011, 2012, 2013 dan 2014 yang memberikan cerita indah tersendiri bagi kehidupan kampus penulis.
12. Mbak Dian Rustiningsih (Ning) dan Mas Daryono atas bantuannya dalam mengurus masalah administrasi selama penulis menjadi mahasiswa.
13. Seluruh civitas Jurusan Teknik Elektro.
Setiap karya yang dibuat oleh manusia, tidak lepas dari kesalahan. Begitupun, dengan tugas akhir ini. Saya menyadari masih banyak kekurangan, dengan segala kerendahan hati saya memohon maaf.
Bandar Lampung, 27 Oktober 2015 Penulis
1
1 PENDAHULUAN
1.1 Latar Belakang
Terdapat sebuah model sistem pengolahan limbah Bahan Berbahaya dan Beracun (B3). Model tersebut dibangun untuk mengetahui cara pengelolaan dan pengolahan limbah yang baik oleh biomassa alga (absorben) agar menghasilkan konsentrasi bahan berbahaya dan beracun (polutan) yang sesuai dengan standar baku mutu sebelum dibuang. Secara langsung penelitian pengolahan dan pengelolaan limbah B3 pada model ini bermanfaat untuk mengurangi dampak pencemaran dan kerusakan lingkungan hidup akibat limbah.
2
Sistem pengendalian suhu pada model tersebut masih menggunakan sistem kendali biasa yaitu kendali on-off dengan celah differensial. Sehingga masih ditemui banyak kekurangan pada pengendalian suhu ruang tempat reaksi kimia berlangsung.
Mengetahui hal tersebut maka pada tugas akhir ini akan diaplikasikan sistem kendali adaptif guna menjaga suhu pada ruang bioreaktor dengan metode Model Reference Adaptive Control (MRAC) sehingga akan didapatkan suatu kondisi nilai suhu yang diinginkan pada proses adsorbsi limbah B3 oleh biomassa alga meskipun terjadi perubahan karakteristik proses pada ruang bioreaktor (plant) yang disebabkan oleh faktor luar.
1.2 Tujuan Penelitian
Tujuan yang ingin dicapai pada penelitian ini adalah mengimplementasikan kendali adaptif Model Reference Adaptive Control (MRAC) agar dapat mempertahankan suhu ruang bioreaktor pada model pengolahan limbah B3 meskipun terjadi perubahan karakteristik proses pada plant akibat faktor luar.
1.3 Manfaat Penelitian
3
1.4 Rumusan Masalah
Untuk mengendalikan suhu ruang bioreaktor pada model pengolahan limbah B3 mengguankan Model Reference Adaptive Control, maka didaptkan rumusan masalah sebagai berikut :
1. Bagaimana merancang dan membangun perangkat keras sistem agar Model Reference Adaptive Control dapat diaplikasikan model pengolahan limbah B3.
2. Bagaimana menentukan fungsi alih sistem (proses).
3. Bagaimana menentukan model dari plant (ruang bioreaktor).
4. Bagaimana menerapkan metode kestabilan Lyapunov sebagai pengaturan parameter-parameter kendali (adjustmen mechanism).
5. Bagaiaman menerapkan metode penempatan pole (Pole Placement) sebagai pengendali.
4
2. Mekanisme pengaturan parameter kendali (adjustment mechanism) adalah menggunakan kestabila Lyapunov.
3. Perancangan pengendali menggunakan metode Pole Placement
4. Plant yang digunkan adalah ruang bioreaktor pada model sistem pengolahan limbah B3.
5. Range pengaturan yang diperbolehkan adalah 30 sampai 40ºC. 6. Pengujian unjuk kerja sistem dilakukan dengan memberi gangguan.
7. Pembahasan dibatasi pada pengendalian suhu pada ruang bioreaktor, tidak mengendalikan parameter-parameter lain yang diperlukan pada proses adsorbsi dan juga tidak membahas proses kimia yang berlangsung.
1.6 Hipotesis
5
1.7 Sistematika Penulisan
BAB I. PENDAHULUAN
Menjelaskan tugas akhir secara umum, berisi latar belakang, tujuan, manfaat penelitian, batasan masalah, perumusan masalah, hipotesis dan sistematika penulisan.
BAB II. TINJAUAN PUSTAKA
Menjelasakan landasan teori yang digunakan dalam penelitian dan membahas penelitian yang telah dan akan dilakukan berhubungan dengan penelitian.
BAB III. METODE PENELITIAN
Menjelaskan langkah-langkah yang akan dilakukan dalam penelitian, diantaranya waktu dan tempat penelitian, alat dan bahan, komponen dan perangkat penelitian, prosedur kerja dan perancangan serta metode penelitian.
BAB IV. HASIL DAN PEMBAHASAN
Bagian yang berisi hasil dari pengujian dan pengambilan data, serta analisa hasil pengujian tersebut.
BAB V. KESIMPULAN DAN SARAN
6
7 2 TINJAUAN PUSTAKA
2.1 Limbah Bahan Berbahaya dan Beracun (B3)
Limbah merupakan sisa aktifitas manusia yang dapat berupa bahan kimia organik maupun anorganik yang akan berdampak negatif bagi lingkungan hidup apabila tidak dikelola dengan baik. Limbah memiliki beberapa jenis yang diklasifikasi berdasarkan jenis zat, wujud, serta asalnya.
Limbah Bahan Berbahaya dan Beracun (limbah B3) menurut PP Np. 18/1999 Jo.
PP No. 85/1999 adalah “sisa suatu usaha dan/atau kegiatan yang mengandung
bahan berbahaya dan/atau beracun yang karena sifat dan/atau konsentrasinya dan /atau jumlahnya, baik secara langsung maupun tidak langsung dapat mencemarkan dan/atau merusak lingkungan hidup, dan/atau dapat membahayakan lingkungan hidup, kesehatan, kelangsungan hidup manusia serta makhluk hidup
lain”. Sumber limbah B3 adalah kegiatan-kegiatan industri logam berat,
8 Limbah B3 sangatlah berbahaya apabila tidak melalui tahap pengolahan yang baik. Berikut adalah karakterisitik limbah B3 :
1. Mudah meledak (explosive)
Terdapat banyak metode dalam pengolahan limbah B3, sesuai dengan kandungan zat yang terdapat pada limbah. Rilyanti, Mita. (2007) melakukan penelitian mengenai pengolahan limbah B3 menggunakan biomassa Sargassum duplicatum yang diimmobilisasi dengan Polietilamina-glutaraldehida sebagai pengurai polutan (zat-zat berbahaya) yang terdapat pada limbah yaitu ion logam Pb(II), Cu(II), dan Cd(II).
2.2 Sistem Kendali Suhu
9 Kendali suhu ruang artinya menjaga kondisi atau nilai suhu udara (set point) dalam sebuah plant pada nilai yang dikehendaki saat terjadi perubahan parameter pada sebuah proses dengan cara mengumpan balikkan nilai variabel proses dan membandingkannya dengan set point. Gultom, M.M. (2007) merancang sebuah sistem kendali suhu ruang bioreaktor yang digunakan sebagai proses pengolahan limbah B3. Sistem dirancang menggunakan metode kendali on-off dengan celah differensial dan mampu menjaga suhu ruang denga nilai 10°, 20°, 27°, 30°, 40° dan 50 °C. Untuk nilai temperatur dibawah 30°C digunakan pendingin (sistem refigerant) sedangkan untuk nilai suhu diatas 30°C digunakan wiring heater. Tugas akhir ini hanya membahas kinerja sistem untuk mencapai nilai referensinya dan tidak melakukan pengujian dengan adanya gangguan. Sistem ini bekerja cukup baik dengan nilai kesalahan sebesar 0.06135 %.
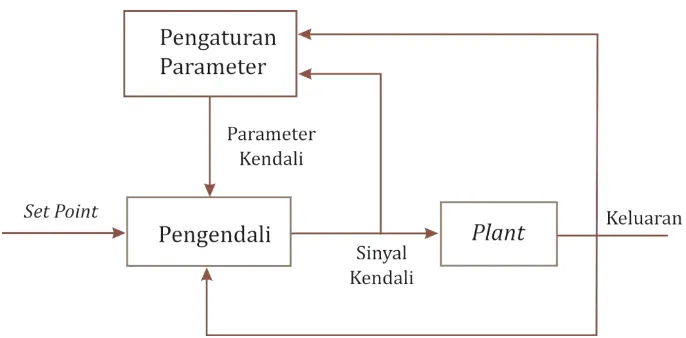
2.3 Teknik Kendali Adaptif (Adaptive Control)
10
Gambar 2.1. Blok diagram sistem adaptif
Pada teknik kendali adaptif terdapat empat skema, yaitu Gain Schedulling, Model-Reference Adaptive Control (MRAC), Self-Tuning Regulator (STR) dan Dual Control. Skema-skema tersebut banyak diterapkan pada sistem pengendalian suhu ruang, seperti penelitian yang dilakukan oleh Mukhaitir, A.S (2010) yang menerapkan kendali PID Gain Scerduling pada plant electric water heater. Dari hasil pengujian penggunaanmetode kendali Gain Scheduling dirasa sangat efektif dalam menangani gangguan. Metode kendali Gain Scheduling menghasilkan nilai ITAE sebesar 141051 yang lebih kecil dibandingkan sistem yang menggunakan kendali PID single dengan nilai ITAE 174067 dan 187569. Analisis indeks performansi kesalahan ITAE digunakan untuk menentukan unjuk kerja sistem yang terbaik dengan menghitung nilai integral dari error yang didapatkan saat pengujian.
11 itu juga kendali adaptif mempunyai kehandalan dalam mengatasi dan mengeliminasi gangguan dari luar.
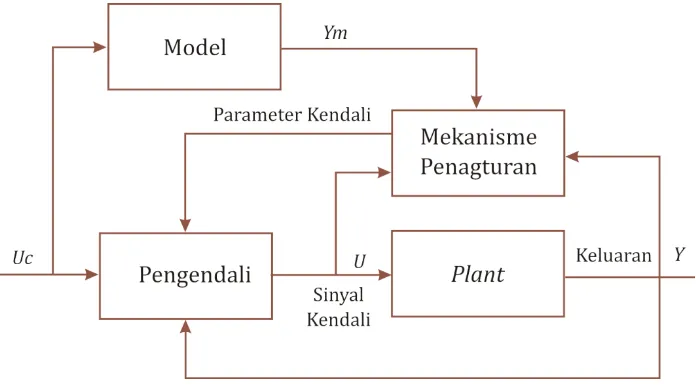
2.4 Model-Reference Adaptive Control (MRAC)
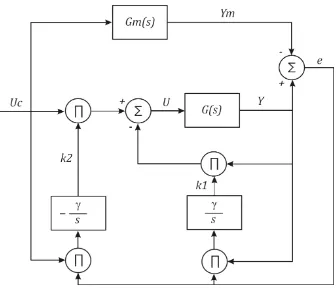
Model-Reference Adaptive Control (MRAC) merupakan salah satu skema kendali adaptif dimana peformasi keluran sistem (proses) mengikuti peformasi keluaran model referensinya. Parameter-prmeter pengendali diatur melalui mekanisme pengaturan yang didasarkan pada error yang merupakan selisih antara keluaran proses dengan keluaran model referensi. Blok diagram skema Model-Reference Adaptive Control ditunjukkan pada gambar 2.2
Gambar 2.2. Blok diagram Model-Reference Adaptive Control (MRAC)
12 sehingga keluaran sistem (y) sesuai dengan keluaran model referensinya (ym).
13
3 METODE PENELITIAN
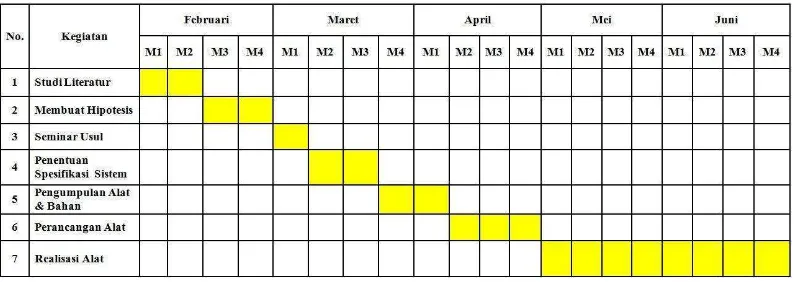
3.1 Waktu dan Tempat Penelitian
Penelitian tugas akhir dilaksanakan pada bulan Februari hingga Oktober 2015. Perancangan dan pengerjaan perangkat keras (hardware) dan laporan dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung. Dengan jadwal kegiatan sesuai dengan tabel 3.1 berikut.
14
lanjutan
3.2 Alat dan Bahan
Alat dan bahan yang digunakan pada penelitian ini dibagi menjadi perangkat keras (hardware) dan perangkat lunak (software) sebagai berikut:
Perangkat keras yang digunakan, yaitu : 1. Power Supply
a) Transforamator
b) IC Regulator (LM7805, 7812, 7824) c) Kapasitor
2. Microcontroller ATmega 2560 3. LM 35 DZ
4. Keypad matrix 5. LCD 16 x 2
15
10. Pemanas Lilit (wiring heater) 11. Kabel
12. PCB dan Pelarut 13. Solder dan Timah 14. Personal Computer
Sedangkan untuk perangkat lunaknya yaitu :
16
3.3 Spesifikasi
Spesifikasi dibagi menjadi 3 bagian, yakni proses kerja model pengolahan limbah B3, spesifikasi sistem yang akan dikembangkan serta spesifikasi peralatan yang akan digunakan.
3.3.1 Proses Kerja Sistem
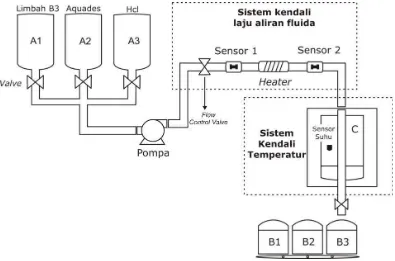
Secara keseluruhan sistem pengolahan limbah B3 yang telah dibangun terdiri dari 3 bagian, yaitu :
1. Bagian Masukan
Bagian masukan terdiri dari tiga tabung, yaitu tabung A1, A2 dan A3. Tabung A1 merupakan penampungan limbah cair B3 yang akan diabsorbsi oleh biomassa, tabung A2 berisikan larutan penetral (aquades) untuk membersihkan logam yang tidak terikat secara kimia dan tabung A3 berisi latutan HCl yang digunakan sebagai pembersih logam yang terikat secara kimia pada biomassa.
2. Bagian Proses
17
3. Bagian Keluaran
Bagian keluaran terdiri dari 3 tabung, yaitu tabung B1 sampai B3. Tabung ini akan menampung cairan hasil proses pengolahan limbah B3 yang berasal dari tabung A.
18
Gambar 3.1 Rancang sistem pengolahan limbah cair B3
3.3.2 Spesifikasi Pengembangan Sistem
Spesifikasi sistem yang akan dikembangkan adalah sebagai berikut :
Sistem mampu mempertahankan suhu ruang bioreaktor sesuai dengan set point meskipun terjadi perubahan karakteristik plant yang disebabkan oleh faktor luar.
3.3.3 Spesifikasi Peralatan
Spesifikasi peralatan yang digunakan adalah sebagai berikut : 1. Plant yang akan dikendalikan berupa ruang bioreaktor. 2. Rangkaian catu daya +5 VDC, +12 VDC serta 220 VAC.
19
4. Rangkaian zero crossing detector yang terdiri dari komponen penyearah dan IC 4N35, rangkaian ini gunakan untuk mendeteksi gelombang sinusoidal AC saat melewati titik tegangan 0 Volt.
5. Rangkaian pengontrol tegangan AC 1 fasa digunakan untuk mengatur besarnya tegangan yang masuk ke wiring heater.
6. Solid State Relay sebagai interface controller dengan wiring heater. 7. Menggunakan sensor LM 35 DZ sebagai pengukur suhu.
20
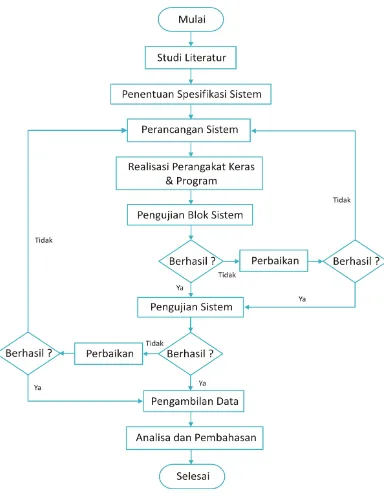
3.4 Metode Kerja Diagram Alir Penelitian
Untuk mempermudah dalam pengerjaan , diperlukan suatu rencana atau langkah-langkah kerja yang jelas. Seperti ditunjukkan pada diagram alir Gambar 3.2 dibawah ini :
21
3.5 Perancangan
Terdapat beberapa tahapan perancangan sistem, yaitu : 3.5.1 Menentukan Fungsi Alih Proses
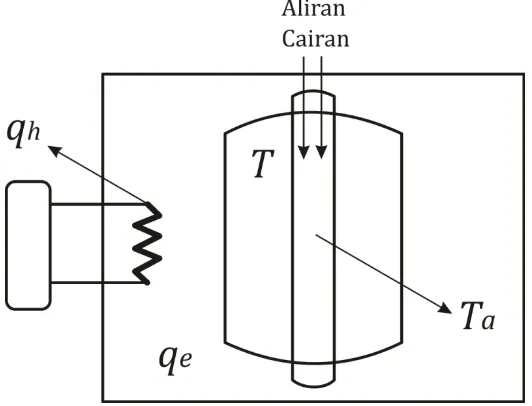
Penentuan fungsi alih diperlukan untuk mengetahui respon sistem (proses) terhadap sinyal masukan. Variabel plant yang akan dikendalikan adalah nilai suhu ruang bioreaktor. Gambar 3.3 menunjukkan rangkaian ekivalen dari plant yang akan dikendalikan nilai suhunya.
Gambar 3.3. Rangkaian ekivalen dari plant
Definisi-definsi di bawah ini diperlukan untuk mendapatkan fungsi alih sistem :
22
(3.1)
Keterangan :
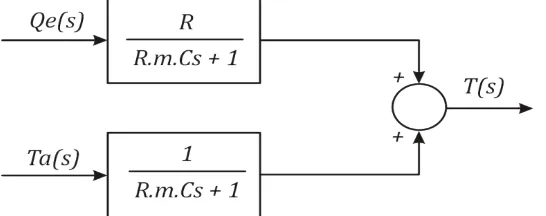
Dengan menggunakan transformasi Laplace dari persamaan 3.1 dan menyeleaikannya untuk suhu maka akan dihasilkan persamaan :
(3.2)
Dimana Qe(s) merupakan masukan sistem dan ditentukan sebagai masukan gangguan.
Persamaan 3.2 dapat dinyatakan dengan diagram blok gambar 3.4 berikut.
23
Dari persamaan 3.4 dan diagram blok diatas diketahui fungsi alih sitem merupakan sistem orde-satu sehingga dapat dituliskan notasi umumnya, yaitu :
(3.3)
Dalam bentuk lain dapat dituliskan sebagai berikut :
(3.4)
Dari persamaan diatas dapat diketahui nilai gain statis dan konstanta waktu
3.5.2 Perancangan Pengendali 1. Kesalahan Keadaan Tunak
Sistem yang akan dikendalikan merupakan sistem orde-satu, sebelum memulai perancangan pengendali menggunakan Lyapunov, perlu ditentukan terlebih dahulu kriteria dari nilai parameter-parameter proses agar tidak terjadi kesalahan keadaan tunak (offset sama dengan nol). Offset merupakan selisih antara nilai referensi dengan nilai keadaan tunak respon sistem . Kesalahan keadaan tunak dituliskan pada persamaan 3.5 berikut :
(3.5)
Persamaan 3.5 didistribusikan dengan persamaan 3.3 sehingga didapatkan persamaan 3.6 berikut :
24
Jika masukan sistem berupa sinyal step, maka kesalahan keadaan tunaknya dapat dituliskan oleh persamaan 3.7 berikut :
(3.7)
Dari persamaan 3.7 dapat diketahui bahwa agar kesalaan keadaan tunak sama dengan nol, maka nilai b harus sama dengan a.
2. Perancangan Pengendali Menggunakan Lyapunov
25
Gambar 3.5. Diagram blok MRAS orde-satu dengan Lyapunov.
Keterangan :
26
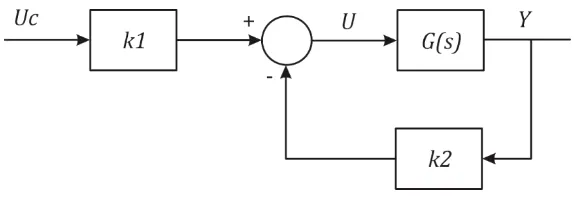
keluaran proses (y) dengan keluaran model (ym). Parameter-parameter yang akan
diatur dinotasikan oleh k1 dan k2. Persamaan updating parameter-parameter
pengendali dapat dilihat pada persamaan 3.8 dan 3.9 berikut :
(3.8)
(3.9)
Langkah pertama dalam perangcangan pengendali adalah menetukan model dari proses sehingga sistem akan bekerja sesuai dengan karakteristik model yang telah ditentukan. Berdasarkan pemodelan secara matematis, sistem kendali suhu ruang tergolong sistem orde-satu, sehingga model yang digunakan adalah sistem orde- satu
Dari notasi umum fungsi alih orde satu maka dapat diketahui :
(3.10)
(3.11)
Sedangkan persamaan fungsi alih sistem adalah :
(3.12)
27
Karena proses dikendalikan secara diskrit maka persamaan model harus dirubah kedalam bentuk diskrit. Persamaan model dalam bentuk differensial dapat ditulis sebagai berikut :
(3.13)
Jika dirubah kedalam bentuk laplace menjadi
(3.14)
Persamaan diatas dengan metode backward difference approximation diubah kedalam persamaan diskrit menjadi :
(3.15)
Setelah mengetahui persamaan fungsi alih proses dan model proses, maka akan ditentukan mekanisme penentuan nilai k1 dan k2 untuk mengatur sinyal kendali (U). Pada perancangan ini digunakan algoritma penempatan pole (Pole Placement). Algoritma penempatan pole ditunjukkan pada blok diagram pada gambar 3.6 berikut :
28
Persamaan untuk menentukan besar sinyal kontrol adalah :
(3.16) Jika kedua parameter tersebut memenuhi persamaan
(3.17)
(3.18)
Maka hubungan masukan dan keluaran sistem dan modelnya akan sama.
Dengan mengubah persamaan ke dalam bentuk diskrit maka akan didapatkan parameter k1 dan k2.
3.19
3.20
Keterangan :
Dari persamaan 3.19 dan 3.20 diketahui bahwa parameter k1 dan k2 sangat
dipengaruhi oleh error sistem e(k), dimana e(k) adalah selisih antara keluaran sistem y(k) dan keluaran model ym(k). Sehingga dapat dikatakan bahwa sinyal
29
3.5.3 Perancangan Perangkat Keras
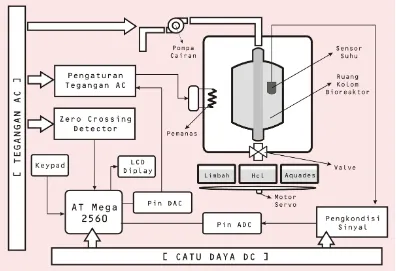
Rancangan sistem kendali suhu ruang bioreaktor diperlihatkan oleh blok diagram pada gambar 3.7. Sistem ini terdiri dari beberapa rangkaian, yaitu rangkaian pengendali Microcontroller AT Mega 2560, rangkaian pengendali tegangan AC 1 fasa, rangkaian zero crossing detector , Wiring Heater, rangkaian sensor suhu LM 35, rangkaian pengkondisi sinyal, serta keypad sebagai input suhu referensi dan LCD display sebagai penampil nilai suhu.
Gambar 3.7. Diagram blok sistem kendali suhu
Dari blok diagram Gambar 3.7 dapat dijelaskan urutan kerja dari sistem kendali suhu ruang kolom biorektor, yaitu:
30
AT Mega 2560 akan membaca nilai referensi suhu yang ditetapkan (masukan keypad) dan akan mengkasilkan sinyal kendali.
Microcontroller AT Mega 2560 sebagai pusat pengolahan data akan membandingkan peformasi keluaran proses (y) dengan peformasi keluaran model (ym) mengahasilkan nilai error (e). Nilai error (e) digunakan untuk menentukan
besarnya sinyal kendali dengan merubah parameter-paremeter pengendali. Sinyal kendali yang diberikan ke wiring heater sesuai dengan kondisi yang dibutuhkan untuk memenuhi nilai referensi (set point). Sinyal kendali ini berupa sinyal PWM yang akan mengatur sudut penyalaan TRIAC yang digunakan untuk mengatur tegangan yang akan masuk ke wiring heater. Wiring heater yang dikendalikan bekerja dengan menggunakan tegangan AC, sehingga untuk mengaplikasikan sistem kendali adaptif dibutuhkan rangkaian pengontrol tegangan 1 fasa. Prinsip dari pengaturan tegangan ini adalah mengatur sudut penyalaan tegangan AC sehingga nilai tegangan dapat bertambah maupun berkurang sesuai dengan persamaan 3.21 berikut :
(3.21)
31
Agar sudut penyalaan dapat sefasa dengan tegangan AC maka dibutuhkan rangkaian zero crossing detector . Zero crossing detector merupakan rangkaian yang digunakan untuk mendeteksi gelombang sinusoida AC 220 volt saat melewati titik tegangan nol (0 volt). Seberangan titik nol yang dideteksi adalah peralihan dari positif menuju negatif dan peralihan dari negatif menuju positif . Seberangan-seberangan titik nol ini merupakan acuan yang digunakan sebagai awal pemberian nilai waktu tunda untuk pemicuan TRIAC.
Penggunaan rangkaian zero crossing detector bertujuan agar sistem bisa mendeteksi zero point sekaligus mengubah suatu sinyal sinusoidal menjadi sinyal kotak. Sinyal keluaran rangkaian zero cross detector ini akan dimasukkan ke microcontroller.
32
Gambar 3.8. Plant (ruang adsorbsi)
Plant pada sistem ini adalah raung bioeraktor yang merupakan sebuah ruang tempat terjadinya proses adsorbsi polutan limbah oleh biomassa. Plant terdiri dari ruangan berbentuk kotak yang terbuat dari mika bening yang di dalamnya terdapat tabung yang terbuat dari kaca, yang disebut tabung adsorbsi. Pada kotak ini diletakkan wiring heater.
2. Rangkaian Sensor Suhu
33
amplifier, berikut adalah gambar serta penjelasan mengenai rangkaian sensor dan pengkondisi sinyal.
Gambar 3.9.Rangkaian sensor suhu
a) Sensor
Terdapat berbagai macam sensor temperatur, namun pada sistem yang sudah ada digunakan sensor temperatur LM 35DZ, karena penggunaanya yang praktis, sinyal keluran yang terkalibrasi langsung dalam derjat celcius, selain itu juga suhu yang akan dikendalikan tidak terlalu besar yaitu 30 – 40° C.
b) Rangkaian Buffer
Rangkaian buffer digunakan agar tegangan yang masuk tidak drop, karena rangkaian buffer dapat menguatkan arus sebuah sinyal tanpa menaikka tegangannya. Komponen yang digunakan adalah IC LM 324.
34
Rangkaian ini berfungsi untuk menguatkan sinyal dengan keluaran yang tetap sefasa dengan sinyal masukan. Komponen yang digunakan adalah IC LM 324 dan resistor.
3. Rangkaian Pengendali Tegangan AC 1 Fasa
Wiring heater menggunakan sumber tegangan AC. Sehingga diperlukan suatu rangkaian yang dapat mengatur besarnya tegangan yang diberikan ke Wiring heater. Rangkaian pengendali tegangan AC 1 fasa ditunjukkan pada gambar 3.10 berikut :
Gambar 3.10. Rangkian Pengendali Tegangan AC 1 Fasa
Pada rangkaian ini digunakan Solid State Relay (SSR) yang terdiri dari komponen utama optoisolator IC MOC 3020. IC MOC 3020 digunakan untuk meneruskan sinyal keluaran microcontroller dengan menggunakan transmitter (infra red) yang akan dikirimkan ke pothotransistor, pengiriman ini berdasarkan komunikasi optik, sehingga rangkaian DC aman dari tegangan AC. Sedangkan TRIAC BT 138 digunakan untuk mengendalikan wiring heater yang bekerja mengguankan tegangan 220 VAC dengan cara mengatur waktu konduksi sinyal AC berdasarkan
35
4. Rangkaian Penampil (LCD)
Modul tampilan yang digunakan berupa LCD (Liquid Crystal Display). Informasi yang ditampilkan berupa karakter huruf dan angka yang dapat menampilkan karakter sebanyak 2 x 16 digit. Tampilan LCD digunakan sebagai penampil informasi untuk set point uhu dan informasi nilai suhu aktual pada ruang bioreaktor. Rangkaian tampilan LCD dapat dilihat pada gambar berikut :
Gambar 3.11. Rangkaian penampil LCD
5. Rangkaian Zero Crossing Detector
36
Gambar 3.12. Rangkaian zero crossing detector
3.5.5 Perancangan Program
Program sistem kendali suhu ditulis dengan bahasa C menggunakn software arduino IDE. Gambar 3.13 menunjukkan algoritma pogram.
37
38
39
3.6 Pengujian dan Pengambilan Data
Pengujian dilakukan untuk melihat kinerja alat sehingga diketahui apakah rangkaian yang telah dibuat sesuai dengan hasil yang diharapkan. Berikut ini adalah tahapan pengujian :
1. Pengujian rangkaian
a. Rangkaian zero crossing detector b. Rangkaian pengatur tegangan AC c. Rangkaian sensor suhu
2. Pengujian variabel kendali a. Nilai fungsi alih proses b. Gain Adaptasi
3. Pengujian unjuk kerja sistem a. Pemberian gangguan
Hasil dari pengujian ini juga diambil sebagai data hasil penelitian, yang akan digunakan untuk analisa dan pembahasan.
3.6.1 Pengujian Rangkaian
1. Pengujian rangkaian zero crossing detector a) Tujuan
40
TRIAC menjadi dasar pengaturan tegangan yang akan mengendalikan wiringheater.
b) Hasil yang Dinginkan
Pada pengujian ini diharapkan rangkaian dapat mendeteksi titik tegangan nol sinyal AC 1 fasa seperti pada gambar 3.15, apabila rangkaian belum berhasil mendeteksi titik nol sinyal AC maka akan dilakukan perbaikan.
Gambar 3.15. Sinyal keluaran ideal rangkaian zero crossing detector
c) Peralatan yang Digunakan
- Rangakain zero crossing detector - Catu daya +5 VDC dan 220 VAC
- Osiloskop
d) Prosedur Pengujian
41
- Menyalakan catu daya 220 VAC sebagai sumber yang akan
dideteksi titik nol nya.
- Mengamati dan menyimpan bentuk sinyal keluaran zero crossing detector pada osiloskop.
Gambar 3.16. Blok diagram rangkaian pengujian zero crossing detector
2. Pengujian Rangkaian Pengaturan Tegangan AC a) Tujuan
Mengetahui besarnya nilai tegangan yang dihasilkan rangkaian untuk dibandingkan dengan nilai tegangan idelanya (hasil perhitungan). Apabila hasil pengujian menunjukkan besarnya tegangan keluaran rangkaian mendekati tegangan idealanya maka rangkaian dapat digunakan untuk mengendalikan wiring heater.
b) Hasil yang Diinginkan
42
Gambar 3.17. Sinyal keluaran pengatur tegangan AC 1 fasa dengan metode penundaan sudut fasa
c) Peralatan yang Digunakan
- Rangakain zero crossing detector - Rangkian pengendali tegangan AC - Catu daya +5VDC dan 220 VAC
- Board Arduino Mega (Atmega 2560) - Osiloskop
- Voltmeter
d) Prosedur Pengujian
43
- Mencatat nilai tegangan keluaran pada Voltmeter
- Mengapati dan menyimpan bentuk sinyal pengatur teganagn AC - Mengatur sudut penyalan TRIAC
Gambar 3.18. Blok diagram pengujian rangkaian pengatur tegangan AC 1 fasa
3. Pengujian Rangkaian Sensor Suhu LM35 DZ a) Tujuan
Memastikan ketepatan sensor dalam mengukur suhu ruang bioreaktor. b) Hasil yang Diinginkan
Besarnya suhu pembacaan rangkaain sensor suhu sesuai dengan (terkalibrasi) dengan termometer digital, sehingga rangkaian dapat digunakan untuk membaca nilai suhu ruang bioreaktor.
c) Peralatan yang Digunakan - Rangkaian sensor suhu - Wiring Heater
- Catu daya +5 VDC dan 220 VAC
44
- Arduino Board - 1 Buah PC d) Prosedur Pengujian
- Merangkain rangkaian pengujian sesuai gambar 3.19 - Mengaktifkan Arduino board dan rangkaian sensor suhu - Menampilkan data pada serial monitor
- Mencatat nilai suhu pada serial monitor dan termometer digital - Membandingkan nilai pembacaan serial monitor dengan
termometer digital
Gambar 3.19. Blok diagram pengujian rangkaian sensor suhu
3.6.2 Pengujian Variabel Kendali
45
1. Pengujian Nilai Fungsi Alih Ruang Bioreaktor a) Tujuan
Pengujian nilai fungsi alih bertujuan untuk mengetahui karakteristik tanggapan suhu pada ruang bioreaktor terhadap besarnya nilai tegangan yang diberikan kepada wiring heater. Besarnya nilai dari karakeristik tanggapan proses digunkan untuk menentukan model dari sistem.
b) Peralatan yang Digunakan
- Catu daya +5 VDC dan 220 VAC - Arduino Board
- Rangkaian Sensor Suhu
- Rangkaian zero crossing detector - Rangkaian pengendali tegangan AC - Wiring Heater
- Personal Computer
c) Metode Pengujian
46
tunaknya maka selanjutnya adalah membuat grafik dari data hasil tersebut.
d) Prosedur Pengujian
- Merangkain rangkaian pengujian seperti pada gambar 3.19
- Menyalakan catu daya +5 VDC untuk arduino board, rangkaian sensor dan rangkaian zero crossing detector (menyalakan sistem) - Memberikan 35% tegangan sumber 220 VAC pada wiring heater
- Menampilan data perubahan suhu ruang bioreaktor pada Personal Computer dan menunggu hingga proses mencapai keadaan tunaknya
- Membuat grafik karakteristik perubahan suhu terhadap sinyal masukan yang diberikan ke heater
- Menentukan nilai parameter-parameter berdasarkan respon sistem 2. Pengujian Nilai Gain Adapasi
a) Tujuan
Mengetahui nilai gain adaptasi yang sesuai dengan karakteristik plant ruang bioreaktor.
b) Peralatan yang Digunakan
- Catu daya +5 VDC dan 220 VAC - Arduino Board
- Rangkaian Sensor Suhu
47
- Wiring Heater - Personal Computer
c) Metode Pengujian
Pengujian dilakukan dengan variasi gain adaptasi sebesar 0,005; 0,01 dan 0,015. Dari ketiga variasi gain adpasi ditetapka selisih antara set point (Uc) dengan keadaan suhu awal (Y0) yang sama yaitu sebesar
4,8 ºC serta waktu sampling (T) 2 detik. Dari masing-masing hasil yang didapat dari variasi gain adaptasi akan ditentukan nilai gain yang paling sesuai karakteristik plant. Terdapat 2 parameter yang akan dibandingkan antara peformasi keluaran sistem (proses) dengan keluaran model, yaitu nilai konstanta waktu dan error steady state (ESS).
d) Prosedur Pengujian
- Merangkain rangkaian pengujian seperti pada gambar 3.19 - Menghidupkan sistem
- Menampilan data perubahan suhu ruang bioreaktor pada Personal Computer dan menunggu hingga proses mencapai keadaan tunaknya
- Membuat grafik dari data yang didapatkan
48
3.6.3 Pengujian Unjuk Kerja Sistem a) Tujuan
Mengetahui unjuk kerja sistem yang ditandai dengan kecepatan sistem dalam mengatasi gangguan.
b) Hasil yang Diinginkan
Hasil yang diharapkan padaa pengujian ini adalah peformasi keluaran suhu (proses) yang dapat mengikuti peformasi kelauran modelnya. c) Peralatan yang Digunakan
- Catu daya +5 VDC dan 220 VAC - Arduino Board
- Rangkaian Sensor Suhu
- Rangkaian zero crossing detector - Rangkaianpengendali tegangan AC - Wiring Heater
- Personal Computer - Kipas DC
d) Metode Pengujian
Pengujian dilakukan dengan memberikan gangguan pada saat respon sistem mencapai keadaan tunaknya. Pemberian gangguan dilakukan dengan memasukkan udara luar melalui kipas inlet.
49
- Merangkain rangkaian pengujian seperti pada gambar 3.19 - Menghidupkan sistem
- Menampilan data perubahan suhu ruang bioreaktor pada Personal Computer dan menunggu hingga proses mencapai keadaan tunaknya
- Menghidupkan kipas inlet sebagai bentuk gangguan pada sistem
65
5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari data hasil pengujian dan analisa dapat ditarik kesimpulan sebagi berikut :
1. Telah berhasil diaplikasikan skema kendali adaptaif Model Reference Adaptive Control (MRAC) yang dapat mempertahankan suhu ruang bioreaktor pada model pengolahan limbah B3.
2. Gain adaptasi yang sesuai dengan karakterisitik respon perubahan suhu plant yang memiliki kosntanta waktu 1320 detik adalah sebesar 0,005 – 0,01.
66
5.2 Saran
DAFTAR PUSTAKA
[1] Astrom,K.J and B.Wittenmark, Adaptive Control, Addison-wesley, Reading, MA, 1995.
[2] Ogata, Katsuhino, 1997. Teknik Kendali Otomatik, Jilid 2, Erlangga, Jakarta.
[3] Runawan, Ferry, 2011. Aplikasi Kendali Adaptif Pada sitem Pengaturan Temperatur Cairan dengan Tipologi Kendali Model Reference Adaptive Controller (MRAC). Jurnal Universitas Diponegoro
[4] Rilyanti, M., 2007. Pengaruh Temperatur Pada Laju Adsorpsi Biomassa Sargassum Duplicatum yang Diimmobilisasi dengan Polietilamina-Glutaraldehida Terhadap Ion Logam Pb(ii), cu(ii), dan cd(ii). Jurnal FMIPA Unila, Volume 13, pp. 139-142.
[5] Gultom, M. M., 2007. Perancangan dan Implementasi Sistem Kendali Suhu untuk Sistem Bioreaktor. ELECTRICIAN-Jurnal Rekayasa dan Teknologi Elektro, Volume 4, p
[6] Firsyari, A. S., 2009. Sistem Pengendalian Suhu pada Proses Distilasi Vakum Bioetanol dengan Menggunkn Arduino. Jurnal Mahasiswa TE Universitas Brawijaya,
Volume 1, p