TUGAS AKHIR
RANCANG BANGUN SYSTEM PENDINGIN MENGGUNAKAN THERMOELEKTRIK BERBASIS MIKROKONTROLER ATMEGA 8535
SIGIT HADI WARDOYO 102408011
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERNYATAAN
RANCANG BANGUN SYSTEM PENDINGIN MENGGUNAKAN THERMOELEKTRIK BERBASIS MIKROKONTROLLER
ATMEGA 8535
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, Kecuali beberapa Kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 15 Januari 2014
Sigit Hadi Wardoyo
PENGHARGAAN
Puji dan Syukur penulis sampaikan kepada Tuhan Yang Maha Kuasa karena atas berkat kasih dan karunia-Nya, Sehingga penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
Ucapan terimakasih penulis sampaikan kepada Bapak Drs. Kurnia Brahmana,M.Si selaku dosen pembimbing pada penyelesaian Laporan Tugas Akhir ini, yang telah memberikan panduan dan perhatian kepada penulis untuk menyempurnakan laporan tugas akhir ini. Ucapan terimakasih juga ditujukan kepada Dr. Perdinan Sinuaji M.Si sebagai Sekretaris Departemen dan Ketua Jurusan program studi Fisika Instrumentasi Dr. Susilawati,M.Si, Dekan Dan Pembantu Dekan Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, Semua Dosen pada Departemen isika FMIPA USU, pegawai di FMIPA USU.
Akhirnya tidak terlupa kan kepada Ibunda Tercinta Dra. Nuriansi Nisma atas doa dan kasih sayang serta bantuan yang berupa materi maupun nonmateri yang telah diberikan kepada penulis selama ini, serta Adik saya Dimas, Irsyad dan Nurul yang selama ini memberikan bantuan dan dorongan kepada penulis. Terkhusus buat Juli Suhartika yang telah memberikan dukungan serta memberikan semangat dan tak henti – hentinya mengingatkan semuanya buat penulis. Juga teman teman khususnya buat abang Samuel, abang Adi, yang banyak membantu serta rekan – rekan seperjuangan dan yang telah diperjuangkan D3 Fisika Intrumentasi stambuk 10 dan 11.
ABSTRAK
PERSETUJUAN
Judul : RANCANG BANGUN SYSTEM PENDINGIN MENGGUNAKAN
THERMOELEKTRIK BERBASIS MIKROKONTROLLER ATMEGA 8535
Kategori : TUGAS AKHIR
Nama : SIGIT HADI WARDOYO
No Induk Mahasiswa : 102408011
Program Studi : DIPLOMA III (D3) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 15 Januari 2014 Disetujui oleh :
Program Studi Fisika Instrumentasi
Ketua, Pembimbing,
Dr.Susilawati,M.Si. (Drs.Kurnia Brahmana, M.Si.)
PERNYATAAN
RANCANG BANGUN SYSTEM PENDINGIN MENGGUNAKAN
THERMOELEKTRIK BERBASIS MIKROKONTROLLER BERBASIS ATMEGA 8535
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 15 Januari 2014
Sigit Hadi Wardoyo
PENGHARGAAN
Puji dan Syukur penulis sampaikan kepada Tuhan Yang Maha Kuasa karena atas berkat kasih dan karunia-Nya, Sehingga penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
Ucapan terimakasih penulis sampaikan kepada Bapak Drs.Kurnia Brahmana,M.Si selaku dosen pembimbing pada penyelesaian Laporan Tugas Akhir ini, yang telah memberikan panduan dan perhatian kepada penulis untuk menyempurnakan laporan tugas akhir ini. Ucapan terimakasih juga ditujukan kepada Dr. Perdinan Sinuaji M.Si sebagai Sekretaris Departemen dan Ketua Jurusan program studi Fisika Instrumentasi Dr. Susilawati,M.Si , Dekan Dan Pembantu Dekan Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, Semua Dosen pada Departemen isika FMIPA USU, pegawai di FMIPA USU.
Akhirnya tidak terlupakan kepada Ibunda Tercinta Dra. Nuriansi Nisma atas doa dan kasih sayang serta bantuan yang berupa materi maupun nonmateri yang telah diberikan kepada penulis selama ini, serta Adik saya Dimas, Irsyad, Nurul yang selama ini memberikan bantuan dan dorongan kepada penulis. Terkhusus buat Juli Suhartika yang telah memberikan dukungan serta tak henti-hentinya memberikan semangat buat penulis. Juga teman teman khususnya buat abang Samuel, abang Adi, yang banyak membantu serta rekan – rekan seperjuangan dan yang telah diperjuangkan D3 Fisika Intrumentasi stambuk 10 dan 11.
ABSTRAK
DAFTAR ISI
Halaman
Persetujuan i
Pernyataan ii
Penghargaan iii
Abstrak iv
Daftar isi v
Daftar Gambar vii
Daftar Tabel viii
Daftar Grafik ix
Bab 1 Pendahuluan
1.1. Latar Belakang 1
1.2. Rumusan Masalah 1
1.3. Tujuan Penulisan 2
1.4. Batasan Masalah 2
1.5. Sistematika Penulisan 2
Bab 2 Landasan Teori
2.1. Pendingin Termoelektrik 4
2.2. Mikrokontroller ATMega 8535 7
2.2.1. Sistem Minimum Mikrokontroller 9
2.2.2. Blok-Blok Sistem Minimum Mikrokontroller 9
2.3. Fitur ATMega 8535 10
2.4. Konfigurasi ATMega 8535 11
2.5. LCD 15
2.6. Bahasa Basic menggunakan BASCOM-AVR 17
2.6.1. Karakter dalam BASCOM 17
2.6.2. Tipe Data 18
2.6.3. Variabel 18
2.6.4. Aplikasi BASCOM dengan LCD 20
2.7. Program Code-Vision AVR 22
2.8. Sensor LM 35 24
Bab 3 Rancangan Sistem
3.1. Pengertian Termoelektrik 25
3.2. Pengembangan Energi Termoelektrik 27
3.3. Pembangkit Termoelektrik 28
3.4. Pendingin Termoelektrik 29
3.5. Parameter penggunaan modul termoelektrik 30
3.6. Sistem Pendinginan Sisi Panas Termoelektrik 30
3.7. Diagram blok sistem 31
3.8. Rangkaian power supply (PSA) 32
3.9. Rangkaian skematik sistem minimum mikrokontroller atmega8535 33
3.10. Rangkaian Sensor LM 35 34
3.12. Flow Chart Program 36
Bab 4 Pengujian Rangkaian
4.1. Pengujian Rangkaian Power Supply 37
4.2. Pengujian Sistem Minimum ATMega 8535 37
4.3. Pengujian Sensor LM 35 37
4.4. Pengujian LCD 38
4.5. Program Code-Vision AVR 49
4.6. Data pengukuran 57
Bab 5 Kesimpulan dan Saran
5.1 Kesimpulan 59
5.2 Saran 59
Daftar Pustaka 60
DAFTAR GAMBAR
Gambar2.1. Program Memory 8
Gambar2.2. Data Memory 9
Gambar2.3. Pin ATMega 8535 12
Gambar2.4. Struktur LCD 16
Gambar2.5. Code Vision AVR 23
Gambar2.6. Sensor LM 35 Grafik Akurasi terhadap Sensor LM 35 24
Gambar3.1. Diagram Blok 31
Gambar3.2. Rangkaian Power Supply (PSA) 32
Gambar3.3. Rangkaian Skematik ATMega 8535 33
Gambar3.4. LM 35 34
Gambar3.5. Rangkaian LCD karakter 2x16 35
DAFTAR TABEL
Tabel 2.1. Konfigurasi Pin Port B ATMega 8535 13
Tabel 2.2. Konfigurasi Pin Port D ATMega 8535 14
Tabel 2.3. Karakter Spesial 18
Tabel 2.4. Tipe Data BASCOM 18
DAFTAR GRAFIK
ABSTRAK
BAB I PENDAHULUAN
1.1LatarBelakang
Berbagai jenis teknologi telah banyak diciptakan oleh manusia untuk dapat mempermudah manusia dalam melakukan pekerjaannya. Sebagai salah satu teknologi yang berkembang ialah tekhnologi di bidang pengukuran suhu dan kelembaban. Alat pengukur suhu dan kelembaban sangat banyak diperlukan dalam hal-hal tertentu. Contohnya, gudang penyimpanan barang yang membutuhkan suhu dankelembaban yang stabil agar keadaan barang tetap baik, pengukuran suhu ruangan pada suatu ruangan tertentu seperti kamar, ruang tamu, ruang belajar yang suhu dan kelembabannya harus diperhatikan dan banyak aplikasi lainnya.
Dalam hal ini penulis ingin membuat Rancang Bangun System Pendingin Thermoelektrik Berbasis Mikrokontroller ATMEGA 8535, dengan pengaturan suhu menggunakan mikrokontroller ATMEGA 8535 sebagai pusat kendalinya. Hasil alat ini bekerja secara otomatis dengan merespon berapa suhu pada suatu ruangan yang dideteksi oleh sensor suhu, mikrokontroller kemudian memproses suhu tersebut dan memberikan output ke LCD (display).
1.2 Rumusan Masalah
1.3 Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah untuk :
1. Merancang suatu alat pengukuran suatu suhu ruang yang di tampilkan pada LCD (display).
2.Mengetahui cara kerja Rancang Bangun System Pendingin Thermoelektrik Berbasis Mikrokontroller ATMEGA 8535.
3.Memberikan penjelasan tentang penggunaan dan cara kerja System Pendingin Thermoelektrik Berbasis Mikrokontroller ATMEGA 8535.
1.4 Batasan Masalah
Adapun yang menjadi batasan masalah dalam perancangan ini adalah :
1.Pembahasan System Pendingin Thermoelektrik Berbasis
Mikrokontroller ATMEGA 8535.
2.Alat yang digunakan adalah Thermoelektrik sebagai sensor pengukur
suhu.
3.Pembahasan hanya meliputi rangkaian Thermoelektrik sebagai sensor pengukur, LCD (display) beserta programnya.
1.5 Sistematika Penulisan
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB II. LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang mikrokontroller ATMEGA 8535, bahasa program yang digunakan, serta cara kerja dari mikrokontroller ATMEGA 8535 dan komponen pendukung.
BAB III. RANCANGAN SISTEM
Pada bab ini akan dibahas perancangan dari alat, yaitu blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang diisikan ke mikrokontroller ATMEGA 8535.
BAB IV. PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas pengujian rangkaian dan hasil pengujian dari masing-masing pada rangkaian serta diisikan program ke mikrokontroller ATMEGA 8535.
BAB V. KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Pendingin Termoelektrik (Termoelectric Cooler)
Pendingin termoelektrik merupakan solid state technology yang bisa menjadi alternatif teknologi pendingin selain sistim vapor compression yang masih memanfaatkan refrijeran. Dibandingkan dengan teknologi kompresi uap yang menggunakan refrijeran sebagai media penyerap kalor, teknologi pendingin termoelekrik relatif lebih ramah lingkungan, tahan lama dan bisa digunakan dalam skala besar dan kecil. Teknologi termoelektrik telah digunakan pada beberapa bidang aplkiasi seperti, peralatan militer, peralatan ruang angkasa, produk – produk industri yang memanfaatkan modul termoelektrik sebagai pendingin.
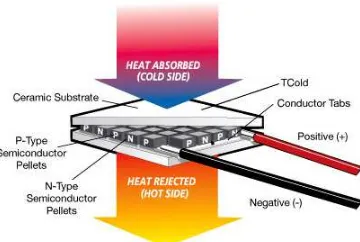
Prinsip Kerja
Modul pendingin termoelektrik bekerja berdasarkan efek Peltier
Gambar diatas menunjukan aliran elektron dari semikonduktor tipe P yang memiliki tingkat energi lebih rendah, menyerap kalor di bagian yang didinginkan lalu elektron mengalir menuju semikonduktor tipe N melalui konduktor penghubung yang permukaannya (Tc) akan mengalami penurunan temperatur.
Kalor yang diserap akan berpindah melalui semikonduktor bersamaan dengan pergerakan elektron ke sisi panas modul (Th). Pada kondisi ideal, jumlah kalor yang diserap pada sisi dingin dan dilepas pada sisi panas bergantung pada koefisien Peltier dan arus listrik yang digunakan. Pada saat dioperasikan jumlah kalor yang diserap pada sisi dinign akan berkurang dikarenakan dua faktor, yaitu kalor yang terbentuk pada material semikonduktor dikarenakan perbedaan temperatur antara sisi dingin dan sisi panas modul (conducted heat) dan Joule Heat yang nilainya akan sama dengan kuadrat dari arus listrik yang digunakan. Sehingga pada kondisi apapun kesetimbangan termal yang terjadi karena efek Peltier pada sisi dingin akan sama dengan jumlah kalor yang terbentuk pada semikonduktor dijumlahkan dengan 1 ½ Joule heat. Selain ukuran yang relatif kecil, modul termoelektrik memiliki keunggulan lain, yaitu :
• Modul termoelektrik tidak memiliki bagian yang bergerak, sehingga untuk perawatan lebih mudah.
• Pengujian usia pakai telah membuktikan bahwa modul termoelektrik bisa digunakan selama 100.000 jam.
• Modul termoelektrik tidak memiliki kandungan chloroflourocarbons (CFC) atau material lainnya yang membutuhkan penambahan berkala. • Modul termoelektrik bisa dioperasikan pada lingkungan yang terlalu kecil
Dengan berbagai keunggulan yang terdapat pada modul termoelektrik, penggunaan termoelektrik saat ini telah melingkupi banyak area penggunaan, misalnya teknologi militer, ruang angkasa peraltan komersil dan industri.
Termoelektrik
Penemuan penting pertama yang berkaitan dengan termoelektrisitas terjadi pada tahun 1821 ketika seorang fisikawan Jerman bernama Thomas Johan Seebeck menemukan fenomena jika dua material logam yang berbeda dihubungkan dalam suatu rangkaian tertutup dan kedua sambungan (junction) dipertahankan pada temperatur yang berbeda maka arus listrik akan mengalir dalam rangkaian tersebut.
Aplikasi termoelektrik telah digunakan diberbagai bidang, tidak hanya sebagai pendingin tetapi juga sebagai pembangkit daya, sensor energi termal maupun digunakan pada bidang militer, ruang angkasa, instrumen, biologi, medikal, dan industri serta produk komersial lainnya.
Pendingin termoelektrik (thermoelectric cooler) adalah alat pompa kalor solid (solid-state heat pump) yang bekerja menurut prinsip efek peltier. Dalam kerjanya, arus listrik searah (DC) mengalir dalam pendingin termoelektrik yang menyebabkan kalor berpindah dari satu sisi pendingin termoelektrik ke sisi lainnya, sehingga terbentuk sisi dingin dan sisi panas.
Aplikasi termoelektrik sebagai pembangkit daya dibagi menjadi 2 bagian sebagai pembangkit daya rendah dan pembangkit daya tinggi. Aplikasi pembangkit daya rendah meliputi pemanfaatan panas tubuh manusia untuk menjalankan jam tangan, sedangkan pembangkit daya tinggi pada termoelektrik memanfaatkan panas dari sisa panas buang yang dihasilkan dari industri maupun pemanfaatan sisa panas dari pembakaran bahan bakar.
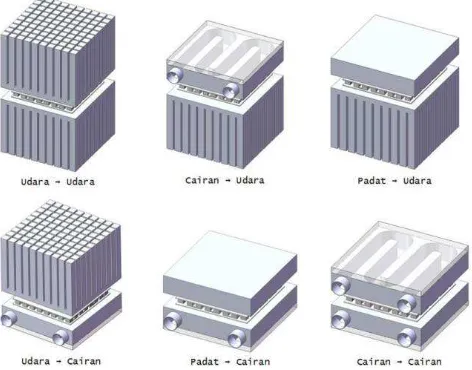
Gambar beberapa susunan sistem termoelektrik
2.2 Mikrokontroller ATMEGA 8535
bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
ATMEGA 8535 memiliki dua jenis memori, yaitu program memory dan data memory di tambah satu fitur tambahan yaitu EEPROM memory untuk penyimpan data. ATMEGA 8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan padasaat AVR reset ataupertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat user. AVR tidak dapat menjalakan program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 kata sampai 1024 kata tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada
Application Flash Section juga sudah aman.
Gambar 2.1. Program Memory
Gambar 2.2. Data Memory
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Loaksinya terpisah dengan system address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.2.1 Sistem Minimum Mikrokontroller
Sistem minimum mikrokontroller merupakan suatu rangkaian yang
dirancang dengan menggunakan komponen-komponen seminimum mungkinuntuk mendukung kerja mikrokontroller sesuai yang kita inginkan. Berbeda dengan sistem minimum mikroprosesor, sistem minimum mikrokontroller ini memiliki pendukung input/output yang programable dan RAM yang On-Chip. Sistem minimum ini dapat dibuat sangat fleksibel tergantung aplikasi yang akan dibuat.
2.2.2 Blok-Blok Sistem Minimum Mikrokontroller
Blok-blok yang terdapat pada sistem minimum mikrokontroller adalah sebagai berikut:
a. Mikrokontroller
memorinya yang sangat terbatas. Bisa dikatakan, mikrokontroler adalah versi mini atau mikro dari sebuah computer karena mikrokontroler sudah mengandung beberapa peripheral yang langsung bias dimanfaatkan, misalnya port parallel, port serial, komparator, konversi analog ke digital (ADC) dan sebagainya hanya menggunakan system minimum yang tidak rumit dan tidak kompleks.
b. Catu Daya
Blok ini berfungsi untuk memberikan tegangan catuan kesisminimum sebesar 5 Volt. Blok catu daya terdiri dari regulator 7805, kapasitor, resistor, danindikator LED.
c. Input/Output
Blok ini berfungsi sebagai input dan output. Blok ini terdiri dari blok input (push button dan keypad) dan pada blok output (LED dan LCD). d. Osilator
Blok ini berfungsi untuk membangkitkan sinyal clock. Blok oscillator terdiri dari kapasitor keramik dan kristal.
e. Serial
Blok ini digunakan untuk mengirimkan data secara serial. Blok serial terdiri dari IC MAX 232 dan port serial (DB 9). MAX232 merupakan komponen untuk mengubah tegangan level TTL menjadi lebih tinggi ke level RS232 sebelum data tersebut ditransmisikan secara serial. Tujuan dari MAX232 adalah agar data yang dikirimkan tersebut tidak habis ditengah jalan.
2.3 Fitur ATMEGA 8535
Kapabilitas detail dari ATMEGA 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal
16MHz.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 chanel.
4. Portal komunikasai serial (USART) dengan kecepatan maksimal 2,5
Mbps.
5. Enam pilihan mode sleep menghemat menggunakan daya listrik.
2.4 Konfigurasi ATMEGA 8535
Konfigurasi pin ATMEGA 8535 bisa dilihat pada gambar dibawah ini. Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin ATMEGA 8535 sebagai berikut :
1. VCC merupan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Oscilat.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan fungsi khusus, yaitu
komparator analog, interupsi eksternal, komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroller.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan masukan tegangan untuk ADC,
Gambar 2.3. Pin ATMEGA 8535
Berikut adalah penjelasan fungsi tiap kaki :
1. PORT A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per-bit). Output buffer Port A dapat memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register Port A (DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai ouput. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2. PORT B
Tabel 2.1 Konfigurasi pin Port B ATMEGA 8535
PORT PIN FUNGSI KHUSUS
PB0 T0 = timer/counter 0 external counter input
PB1 T1 = timer/counter 0 external counter input
PB2 AINO = analog comparator positive input
PB3 AINI = analog comparator negative input
PB4 SS = SPI slave selec input
PB5 MOSI = SPI bus master output/slave input
PB6 MISO = SPI bus serial input/slave output
PB7 SCK = SPI bus serial clock
3. PORT C
Merupakan 8-bit directional Port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per-bit). Output buffer Port C Dapat memberikan arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, DUA pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai ocilator untuk timer/counter2.
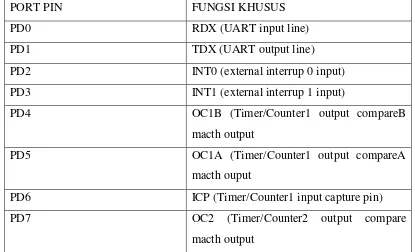
4. PORT D
Tabel 2.2. Konfigurasi Pin Port D ATMEGA 8535
PORT PIN FUNGSI KHUSUS
PD0 RDX (UART input line)
PD1 TDX (UART output line)
PD2 INT0 (external interrup 0 input)
PD3 INT1 (external interrup 1 input)
PD4 OC1B (Timer/Counter1 output compareB
macth output
PD5 OC1A (Timer/Counter1 output compareA
macth ouput
PD6 ICP (Timer/Counter1 input capture pin)
PD7 OC2 (Timer/Counter2 output compare
macth output
5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset.
6. XTAL1
XTAL1 adalah masukan ke inverting oscilator amplifier dan input ke internal clock operating circuit.
7. XTAL2
XTAL2 adalah output dari inverting oscilator amplifier. 8. AVCC
AVCC adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke VCC melalui lowpass filter. 9. AREF
10.AGND
AGND adalah kaki untuk analog groud. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah.
2.5 LCD
LCD (liquid crystal Display)
Kegunaan LCD banyak sekali dalam perancangan suatu sistem dengan
menggunakan mikrokontroler, LCD (Liquid Crysral Display) dapat berfungsi
untuk menampilkan suatu nilai hasil sensor, menampilakan teks, atau
menampilakan menu pada aplikasi mikrokontroler. M1632 merupakan modul
LCD matrix dengan konfigurasi 16 karakter dan 2 baris dengan setiap karakternya
dibentuk oleh baris pixel dan 5 kolom pixel (1 baris pixel terakhir adalah kursor).
Didalam modul M1632 sudah tersedia HD44780 yang dikeluarkan oleh
Hitachi, Hyundai dan modul-modul M1632 lainnya. HD44780 sebetulnya
merupakan mikrokontroler dirancang khusus untuk mengenendalikan LCD dan
mempunyai kemampuan untuk mengatur proses scanning pada layar LCD yang
terbentuk oleh 16COM dan 40 SEG sehingga mikrokontroler/perangkat yang
mengakses modul LCD ini tidak perlu lagi mengatur scanning pada layar LCD.
Mikrokontroler atau perangkat tersebut hanya mengirim data-data yang
merupakan karakter yang akan ditampilkan pada LCD atau perintah yang
mengatur proses tampilan pada LCD saja.
Adapun konfigurasi dan deskripsi dari pin-pin LCD M1632 antara lain:
1. Pin 1 dihubungkan ke Gnd
3. Pin 3 dihubungkan ke bagian tegangan potensiometer 10KOhm sebagai
pengatur kontras.
4. Pin 4 untuk membritahukan LCD bahwa sinyal yang dikirim adalah data,
jika Pin 4 ini diset ke logika 1 (high, +5V), atau memberitahukan bahwa
sinyal yang dikirim adalah perintah jika pin ini di set ke logika 0 (low,
0V).
5. Pin 5 digunakan untuk mengatur fungsi LCD. Jika di set ke logika 1 (high,
+5V) maka LCD berfungsi untuk menerima data (membaca data). Dan
fungsi untuk mengeluarkan data, jika pin ini di set ke logika 0 (low, 0V).
Namun kebanyakan aplikasi hanya digunakan untuk menerima data,
sehingga pin 5 ini selalu dihubungkan ke Gnd.
6. Pin 6 adalah terminal enable. Berlogika 1 setiap kali pengiriman atau
pembaca data.
7. Pin 7 – Pin 14 adalah data 8 bit data bus (Aplikasi ini menggunakan 4 bit
MSB saja, sehingga pin data yang digunkan hanya Pin 11 – Pin 14).
8. Pin 15 dan Pin 16 adalah tegangan untuk menyalakan lampu LCD.
Adapun gambar dari LCD 2x16 adalah sebagai berikut:
2.6 Bahasa BASIC Menggunkan BASCOM-AVR
BASCOM-AVR adalah program BASIC Compiler berbasis windows
untuk Mikrokontrorel keluarga AVR sepeti ATMEGA ,dan yang
lainnya.BASCOM –AVR merupakan program dengan bahasa tingkat tinggi BASIC yang dikembangkan dan dikeluarkan oleh MCS Elektronika
2.6.1 Karakter dalam BASCOM
Dalam program BASCOM,karakter dasarnya terdiri dari karaktera alphabet (A-Z dan a-z),karakater numeric(0-9), dan karakter special (table 2.2)
Karakter Nama Blank
‘ Apostrophe
* Asterisk (symbol perkalian)
+ Plus sign
, Comma
- Minus sign
. Period (decimal point)
/ Slash (division symbol) will be handled as\
: Colon
“ Double quotation mark
; Semicolon
< Less than
> Greater than
\ Backspace (integer or word division symbol)
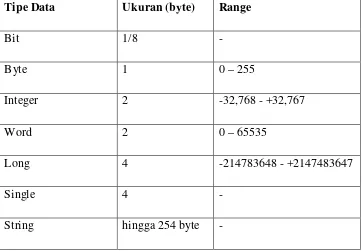
Tabel 2.3 Karakter special 2.6.2 Tipe Data
Setiap variabel dalam BASCOM memiliki tipe data yang
menunjukkan daya tampungannya. Hal ini berhubungan denga penggunaan memori mikrokontroler. Berikut ini adalah tipe data pada BASCOM berikut keterangannya :
Tipe Data Ukuran (byte) Range
Bit 1/8 -
Byte 1 0 – 255
Integer 2 -32,768 - +32,767
Word 2 0 – 65535
Long 4 -214783648 - +2147483647
Single 4 -
String hingga 254 byte -
Tabel 2. 4 Tipe Data BASCOM
2.6.3 Variabel
hasil perhitungan, menampung data hasil pembacaan register, dan lainnya. Variabel merupakan pointer yang menunjukkan pada alamat memori fisik dan mikrokontroler.
Dalam BASCOM, ada beberapa aturan dalam penamaan sebuah variabel:
a. Nama variabel maksimum terdiri dari 32 karakter
b. Karakter biasanya berupa huruf dan angka
c. Nama variabel harus dimulai dengan huruf
d. Variabel tidak boleh menggunakan kata
e. Kata yang digunakan oleh BASCOM sebagai
perintah,pernyataan ,internal register dan nama operator(AND,OR,DIM, dan lain lain).
Sebelum digunakan maka variabel harus dideklarasikan terlebih dahu. Dalam BASCOM, ada beberapa cara untuk mendeklarasikan sebuah variabel. Cara pertama adalah menggunakan pernyataan ‘DIM’ diikuti nama tipe datanya. Contohnya pendeklarasian menggunkan DIM sebagai berikut:
2.6.4 Aplikasi BASCOM dengan LCD
Salah satu kelebihan yang dimiliki oleh BASCOM adalah programnya yang menyediakan rutin-rutin khusus untuk menampilkan karakter menggunakan LCD. Bahkan kita pun dapat membuat karakter special dengan fasilitas LCD designer.
Antarmuka antara LCD dengan ATmega8535 menggunakan mode antarmuka 4 bit. Selain lebih hemat I/O, mode demikian mempermudah proses pembuatan PCB-nya. Program berikut akan menjalankan beberapa perintah berkenan dengan LCD.
$regfile = “m8535.dat” $crystal = 8000000 dim x as byte config LCD = 16*2 Cursor off
do X = 100 Cls
Lcd “Nama: Sigit Hadi” Lowerline
Lcd “Nama: Sigit Hadi”; x Wait 1
Cls
For x=1 to 16 Shiftlcd left next
For x=1 to 32 Shiftlcd right Waitms 200 Next
x = 100 cls lcd hex x loop
penjelasan programnya sebagai berikut:
a. Dim x As Byte
Pernyataan di atas merupakan pendeklarasian variabel c/x dengan ukuran byte.
b. Config LCD = 16 * 2
Oleh karana itu konfigurasi pendeklarasikannya delisting program yang kita buat seperti dikontrolkan diatas.
c. CLS
d. Lowerline
Perintah berfungsi memindahkan kursor ke baris bawah. Karena LCD yang digunakan adalah LCD 2x16, maka LCD memilih 2 baris dan kolom.
e. X = 100
Lcd “Nama: Sigit Hadi”
Lowerline
Lcd “Nama: Sigit Hadi”; x
Ketika kita menjalankan perintah di atas, maka keluarannya adalah:
Nama: Sigit Hadi
Nama: Sigit Hadi
Contoh tersebut menunjukkan bahwa kita dapat menampilkan isi sebuah variabel menggunakan LCD hanya dengan menulis.
f. Shift LCD left/right
Perintah digunakan untuk menggeser tampilan LCD ke kiri atau ke kanan sebanyak 1 langkah. Perintah berguna untuk menampilkan kalimat yang panjang dan membuat animasi LCD.
g. Lcdhex x
Perintah berfungsi mengirim isi sebuah variabel LCD dalam format hexadecimal. Jika ingin menjalankan program
2.7 Program Codvision AVR
Gambar 2.5 Code Vision AVR
Software Code Vision AVR merupakan C Compiler untuk mikrokontroller AVR. Pada Code Vision telah disediakan editor yang berfungsi untuk membuat program dalam bahasa C, setelah melakukan proses kompilasi kita dapat mengisikan program yang telah dibuat kedalam memori mikrokontroller menggunakan programmer yang telah disediakan oleh Code Vision AVR. Programmer yang didukung oleh Code Vision Programmer Cable dapat diintegrasik dengan Code Vision AVR, terlebih dahulu harus dilakukan konfigurasi sebagai berikut :
- Jalankan software Code Vision AVR.
- Pilih menu setting. Programmer.
- Pilih tipe programmer.
- Lalu klik tombol OK.
Catatan: Proses ini hanya dapat dilakukan pada saat ada project yang telah dibuat atau dibuka.
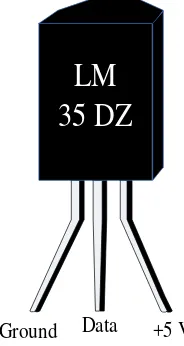
2.8 SENSOR LM 35
Sensor suhu (temperature) pada tugas proyek akhir ini menggunakan LM35, dimana output dari LM35 ini dapat memberikan output 8-bit data yang menyatakan kondisi perubahan dari suhu lingkungan. Setiap terjadi perubahan suhu maka akan terjadi perubahan data output yang dihasilkan, dimana perubahan tersebut berupa perbedaan tegangan yang dihasilkan. LM 35 memiliki kelebihan-kelebihan sebagai berikut. Dikalibrasi langsung dalam celcius memiliki faktor skala linear + 10.0 mV/°C, memiliki ketepatan 0,5°C pada suhu +25°C seperti terlihat pada gambar 2.6 jangkauan maksimal suhu antara -55° sampai +150°C, cocok untuk aplikasi jarak jauh, harga yang cukup murah, bekerja pada tegangan catu 4 sampai 30 Volt memiliki arus drain kurang dari 60 uA pemanasan sendiri yang lambat (low self – heating), 0,08°C di udara diam ketidak linearan hanya sekitar ±1_4°C; dan memiliki impedansi keluaran yang kecil, 0,1 W untuk beban 1 mA.
BAB III
RANCANGAN SISTEM 3.1 PENGERTIAN TERMOELEKTRIK
Prinsip kerja dari Termoelektrik adalah dengan berdasarkan Efek Seebeck yaitu “jika 2 buah logam yang berbeda disambungkan salah satu ujunganya, kemudian diberikan suhu yang berbeda pada sambungan, maka terjadi perbedaan tegangan pada ujung yang satu dengan ujung yang lain”.( Muhaimin, 1993). Fenomena termoelektrik pertama kali ditemukan tahun 1821 oleh ilmuwan Jerman, Thomas Johann Seebeck. Ia menghubungkan tembaga dan besi dalam sebuah rangkaian. Di antara kedua logam tersebut lalu diletakkan jarum kompas. Ketika sisi logam tersebut dipanaskan, jarum kompas ternyata bergerak. Belakangan diketahui, hal ini terjadi karena aliran listrik yang terjadi pada logam menimbulkan medan magnet. Medan magnet inilah yang menggerakkan jarum kompas. Fenomena tersebut kemudian dikenal dengan efek Seebeck.
mendapatkan material seperti ini, karena umumnya jika konduktivitas listrik suatu material tinggi, konduktivitas panasnya pun akan tinggi.
Material yang banyak digunakan saat ini adalah Bi 2 Te 3, PbTe, dan SiGe. Saat ini Bi2 Te3 memiliki figure of merit tertinggi. Namun, karena terurai dan teroksidasi pada suhu di atas 500 oC, pemakaiannya masih terbatas. Rendahnya figure of merit ini menyebabkan rendahnya efisiensi konversi yang dihasilkan, di mana saat ini efisiensinya masih berkisar di bawah 10 persen. Nilai ini masih berkurang sampai 5 persen setelah menjadi sebuah sistem pembangkit listrik. Masih cukup jauh dibandingkan dengan solar cell yang sudah mencapai 15 persen. Namun, penelitian ini masih terus berkembang, apalagi setelah Yamaha Co Ltd berhasil menaikkan figure of merit sebesar 40 persen dari yang ada selama ini. Setelah itu, perkembangan termoelektrik tidak diketahui dengan jelas sampai kemudian dilanjutkan oleh WW Coblenz pada tahun 1913 yang menggunakan tembaga dan constantan (campuran nikel dan tembaga). Dengan efisiensi konversi sebesar 0,008 persen, sistem yang dibuatnya itu berhasil membangkitkan listrik sebesar 0,6 mW. AF Ioffe melanjutkan lagi dengan bahan-bahan semikonduktor dari golongan II-V, IV-VI, V-VI yang saat itu mulai berkembang. Hasilnya cukup mengejutkan, di mana efisiensinya meningkat menjadi 4 persen. Ioffe melakukan satu lompatan besar di mana ia berhasil menyempurnakan teori yang berhubungan dengan material termoelektrik. Teori itu dibukukan tahun 1956 yang kemudian menjadi rujukan para peneliti hingga saat ini.
sangat besar. Ini memberikan imbas kepada teknologi termoelektrik sebagai sumber energi alternatif.(Asyafe,2008). Teknologi termoelektrik bekerja dengan mengonversi energi panas menjadi listrik secara langsung (generator termoelektrik), atau sebaliknya, dari listrik menghasilkan dingin (pendingin termoelektrik). Untuk menghasilkan listrik, material termoelektrik cukup diletakkan sedemikian rupa dalam rangkaian yang menghubungkan sumber panas dan dingin. Dari rangkaian itu akan dihasilkan sejumlah listrik sesuai dengan jenis bahan yang dipakai. Kerja pendingin termoelektrik pun tidak jauh berbeda. Jika material termoelektrik dialiri listrik, panas yang ada di sekitarnya akan terserap. Dengan demikian, untuk mendinginkan udara, tidak diperlukan kompresor pendingin seperti halnya di mesin-mesin pendingin konvensional. Untuk keperluan pembangkitan lisrik tersebut umumnya bahan yang digunakan adalah bahan semikonduktor. Semikonduktor adalah bahan yang mampu menghantarkan arus listrik namun tidak sempurna. Semikonduktor yang digunakan adalah semikomduktor tipe n dan tipe p. Bahan semikonduktor yang digunakan adalah bahan semikonduktor ekstrinsik. Persoalan untuk Termoelektrik adalah untuk mendapatkan bahan yang mampu bekerja pada suhu tinggi. Terdapat tiga sifat bahan Termoelektrik yang penting, yaitu :
1. Koefisien Seebeck 2. Konduktifitas panas 3. Resistivitas
3.2 PENGEMBANGAN ENERGI TERMOELEKTRIK
Sejak awal tahun 1990, tuntutan dunia tentang teknologi yang ramah lingkungan sangat besar. Ini memberikan imbas kepada teknologi termoelektrik sebagai sumber energi alternatif. Banyak aplikasi lain penggunaan energi termoelektrik selain pada RTG yang digunakan oleh Voyager 1.
Efisiensi energi pembangkit ini masih rendah akibat beberapa kali proses konversi. Panas yang dihasilkan banyak yang dilepas atau terbuang percuma. Dapat digunakan suatu metode yang dikenal sebagai cogeneration di mana panas yang dihasilkan selama proses dapat digunakan untuk tujuan alternatif. Dengan menggunakan termoelekrik, panas yang dihasilkan selama proses diubah menjadi listrik, sehingga panas yang dihasilkan tidak terbuang secara percuma dan energi yang dihasilkan oleh pembangkit menjadi lebih besar, serta efisiensi energi menjadi lebih tinggi.
Contoh penerapan lainnya yang sedang dikembangkan saat ini adalah pemanfaatan perbedaan panas di dasar laut dan darat, sistem hybrid pada kendaraan bermotor yang memanfaatkan motor listrik dan mesin pembakaran, serta pemanfaatan pada pembangkit listrik tenaga surya.
Kesulitan terbesar dalam pengembangan energi ini adalah mencari material termoelektrik yang memiliki efisiensi konversi energi yang tinggi. Parameter material termoelektrik dilihat dari besar figure of merit suatu material. Idealnya, material termoelektrik memiliki konduktivitas listrik tinggi dan konduktivitas panas yang rendah. Namun kenyataannya sangat sulit mendapatkan material seperti ini, karena umumnya jika konduktivitas listrik suatu material tinggi, konduktivitas panasnya pun akan tinggi.
Walaupun demikian, teknologi material yang saat ini sedang berkembang pesat terutama kemampuan menyusun material dalam level nano diharapkan dapat menghasilkan suatu material termoelektrik dengan efisiensi yang tinggi.
3.3 PEMBANGKIT TERMOELEKTRIK
Sumber panas dapat diserap oleh sisi panas modul termoelektrik baik secara konduksi, konveksi maupun radiasi. Seiring dengan bertambahnya temperatur pada sisi panas modul termoelektrik, muatan pembawa pada tiap-tiap semikonduktor berdifusi menuju sisi dingin termoelektrik. Pada semikonduktor tipe-n, pembawa muatan disebut elektron. Konduksi terjadi karena adanya elektron bebas dan muatan negatif yang terkumpul pada sisi dingin modul termoelektrik. Pada semikonduktor tipe-p pembawa muatan disebut hole. Konduksi pada semikondutor tipe-p terjadi karena adanya hole dan muatan positif yang berkumpul pada sisi dingin modul termoelektrik. Elektron dan hole tersebut mempengaruhi semikonduktor intrinsik dan berefek pada perpindahan masing-masing muatan pembawa. Medan listrik timbul karena adanya difusi muatan yang telah mencapai poin keseimbangan sehingga tegangan open circuit dihasilkan
Potensi pembangkitan daya dari modul termoelektrik tunggal akan berbeda-beda tergantung pada ukurannya, konstruksinya, dan perbedaan temperaturnya. Perbedaan temperatur yang makin besar antara sisi panas dan sisi dingin modul termoelektrik akan menghasilkan tegangan yang makin besar.
3.4 PENDINGIN TERMOELEKTRIK
Pendingin termoelektrik bekerja berdasarkan efek peltier, ketika modul termoelektrik dilewatkan arus searah (DC), maka salah satu sisi dari modul termoelektrik akan menimbulkan panas dan sisi yang lain dingin. Prinsip kerja pendingin termoelektrik dapat di ilustrasikan pada gambar berikut.
3.5 PARAMETER PENGGUNAAN MODUL TERMOELEKTRIK
Setiap modul termoelektrik yang digunakan untuk aplikasi pendingin dikarakterisasikan kedalam beberapa parameter penggunaan yang menentukan pemilihan modul yang lebih akurat diantara banyak pilihan modul yang tersedia. Berikut beberapa parameter yang menjadi dasar pemilihan modul termoelektrik :
• Jumlah kalor yang akan diserap oleh sisi dingin modul.
• Perbedaan temperatur antara sisi panas dan sisi dingin modul ketika beroperasi.
• Arus listrik yang digunakan oleh modul. • Tegangan listrik yang diugunakan oleh modul.
• Temperatur tertinggi dan terendah lingkungan dimana modul beroperasi.
3.6 SISTEM PENDINGINAN SISI PANAS TERMOELEKTRIK
• Heat Sink
Heat sink yang baik seharusnya memiliki nilai hambatan termal yang rendah. Hal ini dikarenakan kemampuan heat sink untuk mengalirkan kalor yang tidak dinginkan dan mecegah terjadinya overheat akan menentukan juga nilai dari
coefficient of performance (COP) dari sistem pendingin termoelektrik.
• Heat Pipe
Teknologi heat pipe telah lebih dahulu digunakan secara luas pada bidang teknologi peralatan ruang angkasa. Heat pipe memiliki nilai konduktivitas termal yang sangat tinggi, jika dibandingkan dengan logam – logam lainnya heat pipe
memiliki nilai konduktivitas termal ratusan kali lebih besar. Dengan sifatnya ini,
heat pipe mampu memindahkan kalor dengan penurunan temperatur sepanjang
heat pipe lebih kecil.
3.7 DIAGRAM BLOK SISTEM
Gambar 3.1 Gambar Blok Diagram Mikrokontroller
ATMega 8535 LM 35
PSA
3.8 RANGKAIAN POWER SUPPLY (PSA)
Rangkaian power supplay berfungsi mensupplay arus tegangan keseluruh rangkaian yang ada. Rangankaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluara 5 volt digunakan untuk mensupplay tegangan keseluruh rangkaian, sedangkan 12 volt digunakan untuk mensupplay tegangan pada aplikasi yaitu rangkaian Seven Segment. Rangkaian power supplay ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian Power Supplay (PSA)
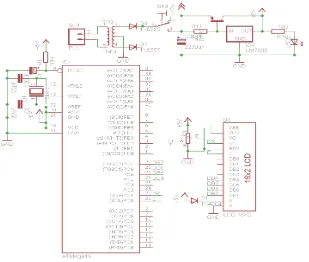
3.9 Rangkaian Skematik Sistem Minimum Mikrokontroller ATMEGA8535
Gambar 3.3 Rangkaian Skematik Sistem Minimum Mikrokontroler ATMEGA 8535
Rangkaian skematik dan layout PCB system mikrokontroller ini berfungsi mengontrol apakah seluruh rangkaian sudah bekerja dengan baik. Pada gambar diatas dapat dilihat pada pin 12 dan 13 dihubungkan ke XTAL8 Mhzdan dua buah kapasitor 30pF. XTAL ini akan mempengaruhi kecepatan mikrokontroller Atmega 8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa tradisi dari dari tinggi ke rendah akan me-reset mikrokontroller ini.
Untuk men-download file heksadesimal ke mikrokontroller , Mosi, Miso, Sck, Reset, Vcc, dan Gnd dari mikrokontroller dihubungkan ke RJ45. RJ45 sebagai konektor yang dihubungkan ke ISP Programmer. Dari ISP Programmer
pemograman mikrokontroller tidak dapat dilakukan karena mikrokontroller tidak akan bisa merespon.
3.10 RANGKAIAN SENSOR LM 35
Sensor suhu (temperature) pada tugas proyek akhir ini menggunakan LM35, dimana output dari LM35 ini dapat memberikan output 8-bit data yang menyatakan kondisi perubahan dari suhu lingkungan. Setiap terjadi perubahan suhu maka akan terjadi perubahan data output yang dihasilkan, dimana perubahan tersebut berupa perbedaan tegangan yang dihasilkan. LM 35 memiliki kelebihan-kelebihan sebagai berikut. Dikalibrasi langsung dalam celcius memiliki faktor skala linear + 10.0 mV/°C, memiliki ketepatan 0,5°C pada suhu +25°C seperti terlihat pada gambar 2.6 jangkauan maksimal suhu antara -55° sampai +150°C, cocok untuk aplikasi jarak jauh, harga yang cukup murah, bekerja pada tegangan catu 4 sampai 30 Volt memiliki arus drain kurang dari 60 uA pemanasan sendiri yang lambat (low self – heating), 0,08°C di udara diam ketidak linearan hanya sekitar ±1_4°C; dan memiliki impedansi keluaran yang kecil, 0,1 W untuk beban 1 mA.
Gambar 3.4 LM 35
LM
35 DZ
3.11 RANGKAIAN DISPLAY (LCD)
Gambar 3.5 rangkaian LCD Karakter 2x16
LCD digunakan untuk menampilkan hasil pengolahan data pada
mikrokontroler dalam bentuk tulisan. Pada alat ini, mode pemrograman LCD yang
digunakan adalah mode pemrograman 4 bit. Dengan demikian, pin data LCD
yang dihubungkan ke mikrokontroler hanya pin D4, D5, D6, dan D7. Sedangkan
untuk jalur kontrolnya, pin LCD yang dihubungkan adalah pin RS dan E. LCD
pada alat ini hanya digunakan sebagai penampil, sehingga pin R/W-nya
3.12 FLOW CHART PROGRAM
Mulai
Inisialisasi Pin
Dan variabel yang digunakan
Konversi Nilai Tegangan
Menjadi Suhu
Baca Nilai ADC
BAB IV
PENGUJIAN RANGKAIAN
4.1 PENGUJIAN RANGKAIAN POWER SUPPLAY ADAPTOR (PSA) Pengujian rangkaian ini dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Setelah itu rangkaian power supply dihubungkan ke sumber arus listrik dan saklar ON/OFF nya diaktifkan ke posisi ON.
4.2 Pengujian Sistem Minimum ATMega 8535
Karena pemrograman robot menggunakan mode ISP (In System
Programming) mikrokontroler harus dapat diprogram langsung pada papan
rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega8535.
4.3 Pengujian Sensor LM 35
Sensor ini bekerja dengan cukup baik, Sensor suhu LM 35 dapat mendeteksi
suhu suatu ruangan tersebut. Tetapi dalam pengujian ini, sensor yang ditampilkan pada 7
segment berupa data yang tetap yang telah diatur sebelumnya dari push buttom, tetapi
setelah kita hidupkan, kita masih dapat juga mengubahnya dengan mengatur push buttom
4.4 Pengujian Seven LCD
Untuk menguji rangkaian LCD, maka dibuatlah rangkaian sebagai berikut ini:
Gambar 4.1 Pengujian Rangkaian LCD
Kemudian, pada mikrokontroler dimasukkan program sebagai berikut:
$regfile = "8535def.dat"
$crystal = 12000000
Config Lcd = 16 *2
Config Lcdpin = Pin , Rs = Portc.1 , E = Portc.0 , Db4 = Portc.4 , Db5 = Portc.5 , Db6 =
Portc.6 , Db7 = Portc.7
Cursor Off
Cls
Do
Locate 1 , 1
Lcd "Hello World"
Loop
• Program keseluruhan rangkaian
/*******************************************************
This program was created by the
CodeWizardAVR V3.04 Standard
Automatic Program Generator
© Copyright 1998-2013 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 7/11/2013
Author :
Company :
Comments:
Chip type : ATmega8535
Program type : Application
AVR Core Clock frequency: 16.000000 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*******************************************************/
#include <mega8535.h>
#include <delay.h>
#include <delay.h>
#include <stdio.h>
#define t5 PIND.6
#define led PORTD.4
#define t2 PIND.0
unsigned char buf[33];
unsigned int t, t_set;
eeprom unsigned int cnt;
bit due;
unsigned char idx;
// Alphanumeric LCD functions
#include <alcd.h>
// Declare your global variables here
// External Interrupt 0 service routine
interrupt [EXT_INT0] void ext_int0_isr(void)
{
// Place your code here
t_set++;
if (t_set > 99) t_set = 99;
lcd_gotoxy(9,1);
sprintf(buf,"Set:%02uC",t_set);
lcd_puts(buf);
}
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
{
// Place your code here
t_set--;
lcd_gotoxy(9,1);
sprintf(buf,"Set:%02uC",t_set);
lcd_puts(buf);
}
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Timer1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
// Reinitialize Timer1 value
TCNT1H=0xBDC >> 8;
TCNT1L=0xBDC & 0xff;
// Place your code here
#define ADC_VREF_TYPE ((1<<REFS1) | (1<<REFS0) | (0<<ADLAR))
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)
{
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=(1<<ADSC);
// Wait for the AD conversion to complete
while ((ADCSRA & (1<<ADIF))==0);
ADCSRA|=(1<<ADIF);
return ADCW;
}
unsigned int suhu (void)
{
float nilai;
unsigned int idx;
nilai = nilai + read_adc(0);
nilai = nilai/2;
return nilai;
}
void main(void)
{
// Declare your local variables here
// Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In
Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3)
| (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T
Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) |
(0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In
Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3)
| (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T
Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) |
(0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In
Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3)
| (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T
Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) |
(0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=Out Bit4=In Bit3=In Bit2=In
Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (1<<DDD4) | (0<<DDD3)
| (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=0 Bit4=T Bit3=T Bit2=T Bit1=T
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) |
(0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) |
(0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 62.500 kHz
// Mode: Normal top=0xFFFF
// OC1A output: Disconnected
// OC1B output: Disconnected
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer Period: 1 s
// Timer1 Overflow Interrupt: On
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) |
(0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) |
(1<<CS12) | (0<<CS11) | (0<<CS10);
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) |
(0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) |
(0<<OCIE1B) | (1<<TOIE1) | (0<<OCIE0) | (1<<TOIE0);
// External Interrupt(s) initialization
// INT0: On
// INT0 Mode: Falling Edge
// INT1: On
// INT1 Mode: Falling Edge
// INT2: Off
GICR|=(1<<INT1) | (1<<INT0) | (0<<INT2);
MCUCR=(1<<ISC11) | (0<<ISC10) | (1<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
GIFR=(1<<INTF1) | (1<<INTF0) | (0<<INTF2);
// USART initialization
// USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) |
(0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization
// Analog Comparator: Off
// The Analog Comparator's positive input is
// The Analog Comparator's negative input is
// connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) |
(0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC Clock frequency: 125.000 kHz
// ADC Voltage Reference: Int., cap. on AREF
// ADC High Speed Mode: Off
// ADC Auto Trigger Source: ADC Stopped
ADMUX=ADC_VREF_TYPE;
ADCSRA=(1<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) |
(0<<ADIE) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);
SFIOR=(1<<ADHSM) | (0<<ADTS2) | (0<<ADTS1) | (0<<ADTS0);
// SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL)
| (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization
// TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) |
(0<<TWIE);
// Alphanumeric LCD initialization
// Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD
menu:
lcd_init(16);
// Global enable interrupts
#asm("sei")
lcd_gotoxy(0,0);
lcd_putsf ("THERMO COOLER");
delay_ms(2000);
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf ("SIGIT D3 FIN ");
due = 0;
delay_ms(1000);
lcd_gotoxy(0,0);
lcd_putsf ("Tekan Tombol 5");
while(t5);
t_set = 25;
lcd_gotoxy(0,0);
lcd_putsf ("SIGIT D3 FIN ");
due = 0;
while (1)
{
// Place your code here
t = suhu();
lcd_gotoxy(0,1);
lcd_puts(buf);
lcd_gotoxy(9,1);
sprintf(buf,"Set:%02uC",t_set);
lcd_puts(buf);
if (due == 1)
{
lcd_gotoxy(0,0);
lcd_putsf ("Kalibrasi Ulang");
while(1);
}
}
4.5 Program Code-Vision AVR
/*******************************************************
This program was created by the
CodeWizardAVR V2.60 Standard
Automatic Program Generator
© Copyright 1998-2012 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 12/20/2012
Author :
Company :
Comments:
Chip type : ATmega8535
Program type : Application
AVR Core Clock frequency: 7.372800 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*******************************************************/
#include <mega8535.h>
#include <delay.h>
#include <std_tool_sio.h>
#define sdt PORTC.2
#define sclk PORTC.3
#define soe PORTC.4
// Declare your global variables here
eeprom unsigned char exp;
void disp (unsigned char n)
{
void t_out (unsigned int ttt)
{
unsigned char rat, pul, sat, sisa;
rat = ttt/100;
// External Interrupt 2 service routine
interrupt [EXT_INT2] void ext_int2_isr(void)
{
// Place your code here
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Reinitialize Timer 0 value
TCNT0=0x4C;
// Place your code here
PORTD = 0x55;
}
// Timer1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
// Reinitialize Timer1 value
TCNT1H=0x1F00 >> 8;
TCNT1L=0x1F00 & 0xff;
// Place your code here
#define ADC_VREF_TYPE ((0<<REFS1) | (1<<REFS0) | (0<<ADLAR))
// Read the AD conversion result
{
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Wait for the AD conversion to complete
while ((ADCSRA & (1<<ADIF))==0);
ADCSRA|=(1<<ADIF);
return ADCW;
}
void main(void)
{
// Declare your local variables here
unsigned int t, t0, t1, t2, t3, t4, t5;
// Input/Output Ports initialization
// Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) |
(0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) |
(0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) |
(0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) |
(0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=Out Bit3=Out Bit2=Out Bit1=In Bit0=In
(1<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=0 Bit3=0 Bit2=0 Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) |
(0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=Out
Bit0=Out
DDRD=(1<<DDD7) | (1<<DDD6) | (1<<DDD5) | (1<<DDD4) | (1<<DDD3) |
(1<<DDD2) | (1<<DDD1) | (1<<DDD0);
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=0 Bit3=0 Bit2=0 Bit1=0 Bit0=0
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) |
(0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: 7.200 kHz
// Mode: Normal top=0xFF
// OC0 output: Disconnected
// Timer Period: 25 ms
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (1<<CS02) |
(0<<CS01) | (1<<CS00);
TCNT0=0x4C;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 115.200 kHz
// Mode: Normal top=0xFFFF
// OC1A output: Disconnected
// OC1B output: Disconnected
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer Period: 0.5 s
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) |
(0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) |
(1<<CS11) | (1<<CS10);
TCNT1H=0x1F;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) |
(0<<CS21) | (0<<CS20);
TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) |
(1<<TOIE1) | (0<<OCIE0) | (1<<TOIE0);
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2 Mode: Falling Edge
GICR|=(0<<INT1) | (0<<INT0) | (1<<INT2);
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00);
MCUCSR=(0<<ISC2);
GIFR=(0<<INTF1) | (0<<INTF0) | (1<<INTF2);
// USART initialization
// USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) |
(0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization
// Analog Comparator: Off
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) |
(0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC Clock frequency: 57.600 kHz
// ADC Voltage Reference: AVCC pin
// ADC High Speed Mode: Off
// ADC Auto Trigger Source: Timer0 Overflow
ADMUX=ADC_VREF_TYPE;
ADCSRA=(1<<ADEN) | (0<<ADSC) | (1<<ADATE) | (0<<ADIF) | (0<<ADIE) |
(1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);
SFIOR=(1<<ADHSM) | (1<<ADTS2) | (0<<ADTS1) | (0<<ADTS0);
// SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) |
(0<<SPR1) | (0<<SPR0);
// TWI initialization
// TWI disabled
4.6 Data Pengukuran
Untuk Air raksa
TAR = 29,5 + 31,2 + 32,4 + 33,1 + 34,9 = = = 32,2
= 32,2
1 = 32,2 – 29,5 = 2,7 2 = 32,2 – 31,2 = 1 3 = 32,2 – 32,4 = 0,2 4 = 32,2 – 33,1 = 0,9 5 = 32,2 – 34,9 = 2,7
= 2,7 + 1 + 0,2 + 0,9 + 2,7 = 7,5
∆ = = 1,5
Nilai TAR = 32,2 1,5
Untuk Termokopel
Ttermo = 29,2 + 30,7 + 31,9 + 32,6 + 34,4 = = = 31,7
= 31,7
1 = 31,7 – 29,2 = 2,5 2 = 31,7 – 30,7 = 1 3 = 31,7 – 31,9 = 0,2 4 = 31,7 – 32,6 = 0,9 5 = 31,7 – 34,4 = 2,7
∆ = 2,5 + 1 + 0,2 + 0,9 + 2,7 = 7,3
∆ =
= 1,46
Untuk LM35
Tabel 4.1 Data pengukuran suhu
No. Air raksa Termokopel LM35
Grafik 4.1 Pengukuran suhu
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam tugas akhir ini.
Kesimpulan yang diambil oleh penulis adalah :
1. Pengukuran suhu ruang Rancang Bagun System Pendingin Thermoelektrik Berbasis Mikrokontroller ATMEGA 8535. tingkat akurasinya lebih baik dibandingkan dengan sensor thermocouple dan air raksa sebesar 0,10C.
5.2 Saran
1. Dengan beberapa pengembangan dan penyempurnaan sistem dari alat ini akan dapat lebih baik lagi hasilnya.
DAFTAR PUSTAKA
Bejo, Agus. 2005. C & AVR Rahasia Kemudahan Bahasa C dalam mikrokontroller
ATMega 8535. Edisi Pertama. Yogyakarta: Penerbit Gava Media.
Lingga, W. 2006. Belajar sendiri Pemograman AVR ATMega 8535. Yogyakarta:
Andi Offset.
Budiharto, Widodo. 2005. Panduan Lengkap Belajar Mikrokontroller Perancangan
Sistem dan Aplikasi Mikrokontroller. Jakarta: PT Elex media Komputindo.
Elektur, 1996. 302 Rangkaian Elektronika. Penerjemah P.Pratomo dkk. Jakarta:
LM35
www.ti.com SNIS159D – AUGUST 1999 – REVISED OCTOBER 2013
LM35 Precision Centigrade Temperature Sensors
1FEATURES DESCRIPTION
The LM35 series are precision integrated-circuit 2• Calibrated Directly in ° Celsius (Centigrade)
temperature sensors, with an output voltage linearly • Linear + 10 mV/°C Scale Factor proportional to the Centigrade temperature. Thus the • 0.5°C Ensured Accuracy (at +25°C) LM35 has an advantage over linear temperature sensors calibrated in ° Kelvin, as the user is not • Rated for Full−55°C to +150°C Range
required to subtract a large constant voltage from the • Suitable for Remote Applications
output to obtain convenient Centigrade scaling. The • Low Cost Due to Wafer-Level Trimming LM35 does not require any external calibration or trimming to provide typical accuracies of ±¼°C at • Operates from 4 to 30 V
room temperature and ±¾°C over a full −55°C to • Less than 60-μA Current Drain
+150°C temperature range. Low cost is assured by • Low Self-Heating, 0.08°C in Still Air trimming and calibration at the wafer level. The low output impedance, linear output, and precise inherent • Nonlinearity Only ±¼°C Typical
calibration of the LM35 make interfacing to readout or • Low Impedance Output, 0.1Ωfor 1 mA Load
control circuitry especially easy. The device is used with single power supplies, or with plus and minus supplies. As the LM35 draws only 60 μA from the supply, it has very low self-heating of less than 0.1°C in still air. The LM35 is rated to operate over a−55°C to +150°C temperature range, while the LM35C is rated for a −40°C to +110°C range (−10° with improved accuracy). The LM35 series is available packaged in hermetic TO transistor packages, while the LM35C, LM35CA, and LM35D are also available in the plastic TO-92 transistor package. The LM35D is also available in an 8-lead surface-mount small-outline package and a plastic TO-220 package.
Figure 1. Basic Centigrade Temperature Sensor
(+2°C to +150°C) Choose R1= –VS/ 50 µA VOUT= 1500 mV at 150°C
VOUT= 250 mV at 25°C
VOUT= –550 mV at –55°C
+VS VOUT
SNIS159D – AUGUST 1999 – REVISED OCTOBER 2013 www.ti.com
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foam during storage or handling to prevent electrostatic damage to the MOS gates.
CONNECTION DIAGRAMS
METAL CAN PACKAGE SMALL-OUTLINE MOLDED PACKAGE
TO (NDV) SOIC-8 (D)
TOP VIEW
Case is connected to negative pin (GND)
N.C. = No connection
PLASTIC PACKAGE PLASTIC PACKAGE TO-92 (LP) TO-220 (NEB) BOTTOM VIEW
Tab is connected to the negative pin (GND).