PEMANFAATAN SENSOR PIR (Passive Infra Red) UNTUK
PENGONTROLAN SUHU RUANGAN
SKRIPSI
Diajukan Untuk Melengkapi Tugas dan Memenui Syarat Memperoleh Gelar Sarjana Sains
BUDI PRATAMA YANI NABABAN
080821008
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
i
PERSETUJUAN
Judul : PEMANFAATAN SENSOR PIR (Passive Infra Red)
UNTUK PENGONTROLAN SUHU RUANGAN
Kategori : SKRIPSI
Nama : BUDI PRATAMA YANI NABABAN
Nomor Induk Mahasiswa : 080821008
Program Studi : S1 FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Januari 2011
Diketahui/disetujui oleh
Departemen Fisika FMIPA USU
Ketua, Pembimbing,
Dr. Marhaposan Situmorang Prof. Dr. Muhammad Zarlis M.Sc
ii
PERNYATAAN
PEMANFAATAN SENSOR PIR (Passive Infra Red) UNTUK PENGONTROLAN SUHU RUANGAN
SKRIPSI
Saya mengakui bahwa Skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Januari 2011
BUDI PRATAMA YANI NABABAN
iii
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pengasih dan Maha Penyayang dengan limpah karunia-Nya, tugas akhir ini berhasil diselesaikan tepat pada waktunya.
Dalam kesempatan ini penulis ingin menyampaikan terimakasih yang sedalam-dalamnya kepada:
1. Ayahanda (M. Nababan) dan Ibunda (L. Malau) yang telah memberikan
bantuan baik materi dan pemikiran serta semangat kepada penulis dalam menyelesaikan tugas akhir ini.
2. Adik-adik penulis Yanti, Tida, Marsinta, Rut Muni dan Manuel yang telah
memberikan semangat dan dukungan kepada Penulis
3. Bapak Dr. Eddy Marlianto,M.Sc selaku Dekan FMIPA USU
4. Bapak Dr. Marhaposan Situmorang, selaku Ketua Jurusan Program Studi
Fisika yang memberikan masukan dan dukungan dalam penyelesaian laporan tugas akhir ini.
5. Bapak Prof.Dr.Muhammad Zarlis. M.Sc sebagai dosen pembimbing yang
memberikan masukan dan dukungan dalam penyelesaian laporan skripsi ini. 6. Sekertaris Departemen Fisika Drs. Justinon, Msi dan semua staff pengajar
yang pernah mengajar di Jurusan Fisika Instruementasi Ekstention serta seluruh pegawai di Departemen Fisika FMIPA USU
7. Rekan-rekan stambuk 2008 yang telah banyak memberikan masukan dan
iv
DAFTAR ISI
Halaman
PERSETUJUAN i
PERNYATAAN ii
PENGHARGAAN iii
BAB 1 PENDAHULUAN
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Permasalahan 2
1.4 Pembatasan Masalah 2
1.5 Tujuan Penelitian 2
1.6 Manfaat Penelitian 3
1.7 Sistematika Penulisan 3
BAB 2 LANDASAN TEORI
2.1 Pengontrolan Suhu 5
2.2 Sensor PIR (Passive Infra Red) 6
2.2.1 Inframerah 6
2.2.2 Pengenalan Sensor PIR 7
2.2.3 Fungsi Pin Sensor PIR 7
2.2.4 Cara Kerja Sensor PIR 10
2.3 Fotodioda 11
2.4 Mikrokontroller AT89S52 13
2.4.1 Sistem Minimum Mikrokontroller AT89S52 13
2.4.2 Asitektur Mikrokontroller AT89S52 14
2.4.3 Konfigurasi Pin Mikrokontroller AT89S52 15
2.4.4 Stuktur Memori 17
2.4.5 Organisasi Memori 19
v
2.9.2 Instruksi Bahasa Assembly MCS-51 32
BAB 3 PERANCANGAN DAN KERJA ALAT
3.1 Diagram Blok Rangkaian 37
3.2 Rangkaian Fotodioda 38
3.3 Rangkaian Sensor PIR 39
3.4 Rangkaian Mikrokontroller AT89S52 41
3.5 Rangkaian Relay 42
3.6 Rangkaian Display LCD Charakter 2 x 16 44
3.7 Rangkaian Sensor Suhu IC LM35 46
3.8 Flowchart Rangkaian 47
BAB 4 HASIL DAN PEMBAHASAN
4.1Pengujian Rangkaian Mikrokontroller AT89S52 49
4.2 Interfacing LCD 2x16 52
4.3 Pengujian Rangkaian Relay 54
4.4 Pengujian Sensor PIR (Passive Infra Red) 56
4.5 Pengujian ADC (Analog Digital Converter) 57
4.6 Pengujian Sensor Suhu IC LM35 59
4.4 Pengoperasian Alat 60
vi
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Pin Sensor PIR 7
Tabel 2.2 Konfigurasi Port 3 Mikrokontroller AT89S52 16
Tabel 2.3 Pin pada Tampilan LCD 22
Tabel 4.1 Waktu Pengeksekusia Rutin Delay 51
Tabel 4.2 Hasil Sensor PIR dengan Sudut 0o 56
Tabel 4.3 Hasil Sensor PIR dengan Sudut 45o 57
Tabel 4.4 Tabel Hasil Pengujian ADC 58
Tabel 4.5 Hasil Pengujian Sensor Suhu 59
vii
Gambar 2.4 Sebuah Objek Melewati Sensor PIR 10
Gambar 2.5 Rangkaian Photodioda dan Grafik Linearitasnya 12
Gambar 2.6 Deskripsi Pin AT89S52 15
Gambar 2.7 Struktur Memori Mikrokontroller AT89S52 17
Gambar 2.8 Alokasi bit PSW 18
Gambar 2.9 Arsitektur memori mikrokontroller AT89S52 19
Gambar 2.10 Pengalamatan Pada mikrokonroller AT89S52 19
Gambar 2.11 LCD character 2 x 16 20
Gambar 2.12 Diagram Blok LCD 21
Gambar 2.13 Konfigurasi pin LCD 2 x 16 22
Gambar 2.14 Skema Relay 26
Gambar 2.15 Bentuk fisik IC LM35 27
Gambar 2.16 Rangkaian Pengukur Suhu 28
Gambar 2.17 Konfigurasi Pin ADC 0804 30
Gambar 3.1 Diagram Blok Rangkaian 37
Gambar 3.2 Rangkaian Fotodioda 38
Gambar 3.3 Pin Sensor PIR 40
Gambar 3.4 Kaki Koneksi PIR (Pasissive Infra Red) 40
Gambar 3.5 Rangkaian Skematik Mikrokontroller AT89S52 41
Gambar 3.6 Relay Pengontrol Suhu Ruangan 43
Gambar 3.7 Display LCD karakter 2 x 16 44
Gambar 3.8 Rangkaian Sensor Suhu IC LM35 46
Gambar 3.9 Flowchart Pengontrol suhu ruangan 47
Gambar 4.1 Rangkaian Pengujian Mikrokontroller AT89S52 49
Gambar 4.2 Pengujian Rangkaian LCD 54
Gambar 4.3 Rangkaian Pengujian Relay 55
Gambar 4.4 Pengujian Rangkaian ADC (Analog Digital Converter) 58
BAB 1
PENDAHULUAN
1.1Latar Belakang
Untuk pada saat melakukan aktivitasnya agar terlaksana secara baik, manusia
memerlukan kondisi fisik tertentu di sekitarnya yang dianggap nyaman. Salah satu
persyaratan yang tidak kalah pentingnya adalah persyaratan akan ‘suhu nyaman’,
yaitu suatu kondisi termis udara di dalam ruaangan yang tidak mengganggu tubuhnya.
Produktivitas kerja cenderung menurun atau tidak maksimum pada kondisi udara yang
tidak nyaman. Dari uraian tersebut jelas bahwa di luar beberapa persyaratan lain yang
diperlukan, persyaratan akan suhu ruang yang nyaman sangat diperlukan bagi tubuh
manusia dalam rangka menyelenggarakan aktifitasnya agar berjalan dengan baik.
Kipas merupakan salah satu pendingin ruangan yang dapat menyejukkan
ruangan sehingga menjadi nyaman sesuai set point yang diinputkan kipas yang
berfungsi menyalurkan udara dingin ke ruangan. Kipas ini yang akan dikontrol
kecepatannya untuk mengatur udara dingin yang akan disalurkan ke ruangan. Kipas
yang tidak dikontrol kecepatannya akan menginputkan udara dingin terus menerus
keruangan tanpa ada kontrol yang membatasi selama kipas tersebut on. Olehkarena itu
dibuat pengontrol kecepatan kipas, agar udara yang disalurkan sesuai dengan yang
dibutuhkan ruangan (sampai set point yang diinputkan) dan diharapkan dapat
mengontrol kecepatan dengan step kecil dan respon yang baik.
Perancangan pengontrolan ini memanfaatkan kemampuan mikrokontroller
AT89S52 sebagai pengolah dan pengeksekusi dari perancangan sistem serta
perancangan pengaturan suhu pada suatu ruangan dengan menggunakan sensor PIR
(Passive Infra Red) sebagai pendeteksi parameter input, dengan mengetahui ada
tidaknya manusia berdasarkan perubahan panas dari radiasi panas yang dipancarkan
tubuh mahluk hidup dalam ruangan yang datanya akan dikirim dan diolah oleh
mikrokontroller dan kemudian memberikan keluaran yang dihubungkan dengan relai
1.2Perumusan Masalah
Berdasarkan uraian diatas, maka penulis merumuskan permasalahan yang ada adalah
bagaimana membuat program mengontrol mesin pengontrol suhu ruangan.
menggunakan Sensor PIR Berbasis Mikrokontroller AT89S52. Untuk lebih
mempermudah dalam melakukan perancangan serta analisis data maka penulis
membatasi permasalahan yaitu bagaimana membuat hardware pada alat pengontrol
suhu ruangan menggunakan bahasa pemrograman assembly.
1.3 Permasalahan
Permasalahan dalam Skripsi ini mencakup:
1. Bagaimana pengkonfigurasian data pada sensor PIR (Passive Infra Red )agar
dapat berhubungan dengan alat yang dibuat serta dapat mengontrol suhu
ruangan?
2. Bagaimana menentukan orang yang masuk dan keluar dari dalam ruangan
dengan menggunakan sensor PIR (Passive Infra Red)?
1.4Pembatasan Masalah
Pembatasan Masalah dalam skripsi ini hanya mencakup masalah-masalah sebagai
berikut:
1. Penggunaan display LCD sebagai sistem penyampai informasi visual.
2. Mikrokontroller menggunakan AT89S52 produksi ATMEL Inc.
3. Sensor gerak yang digunakan adalah Sensor PIR (Passive Infra Red)
1.5 Tujuan Penelitian
Skripsi ini disusun untuk memenuhi beberapa tujuan yang diharapkan yaitu :
1. Mengaplikasikan ilmu yang diperoleh di perkuliahan dalam bidang elektronik.
2. Memahami bagaimana cara mengintegrasikan program dalam sebuah sistem
mikroprosesor terpadu untuk menghasilkan sebuah alat yang sederhana dan
1.6Manfaat Penelitian
Manfaat yang diharapkan dapat diambil dari penyusunan skripsi ini adalah :
1. Dapat menciptakan sebuah alat dengan antarmuka yang sederhana dengan
output yang memadai dan secara langsung dapat diintepretasikan dengan
mudah secara visual.
2. Memahami teknik pemrograman yang baik untuk pemanfaataan fitur-fitur
mikrokontroller AT89S52
1.4Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika penulisan bagaimana sebenarnya prinsip kerja dari Sensor PIR.
BAB 1 PENDAHULUAN
Dalam hal ini berisikan mengenai latar belakang, tujuan penulis,
batasan masalah, rumusan masalah serta sistematika penulisan.
BAB 2 LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang
digunakan untuk pembahasan dan cara kerja dari rangkaian teori
pendukung itu antara lain mikrokontroller AT89S52 (hardware dan
software), bahasa program yang digunakan, serta cara kerja dari sensor
PIR dan komponen pendukung.
BAB 3 PERANCANGAN DAN CARA KERJA ALAT
Dalam bab ini dibahas tentang sistem kerja perblok diagram serta
BAB 4 HASIL DAN PEMBAHASAN
Meliputi hasil analisa dari rangkaian dari sistem kerja alat, penjelasan
dan program-program yang digunakan untuk mengaktifkan rangkaian.
BAB 5 KESIMPULAN DAN SARAN
Mengenai kesimpulan yang didapat setelah merakit alat dan saran yang
diberikan demi kesempurnaan dan pengembangan alat ini pada yang
BAB 2
LANDASAN TEORI
2.1 Pengontrolan Suhu
Perkembangan teknologi kontrol saat ini mulai bergeser kepada otomatisasi sistem
kontrol yang menuntut pengunaan komputer, sehingga campur tangan manusia dalam
pengontrolan sangat kecil. Umumnya untuk pengaturan pengontrolan suhu ruangan
digunakan prinsip on-off, dimana pada saat seseorang memasuki ruangan kipas
dinyalakan dan akan dimatikan apabila tidak ada manusia dalam ruangan. Dengan
prinsip on-off, pengaturan suhu hanya berdasarkan pada kondisi ada tidaknya manusia
dalam ruangan. Oleh karena itu diperlukan pengaturan suhu, baik untuk faktor
kenyamanan maupun efisiensi pemakaian energi listrik. Mengingat pentingnya
pengaturan pengaturan suhu ruangan. dalam tugas akhir ini dirancangpengendali suhu
ruang-ruang yang secara fungsional berbeda, misalnya ruang tidur, ruang keluarga,
dan ruang baca, dalam sebuah rumah
Kipas merupakan salah satu pendingin ruangan yang dapat menyejukkan
ruangan sehingga menjadi nyaman sesuai set point yang diinputkan. Pada kipas yang
berfungsi menyalurkan udara dingin ke ruangan. Kipas ini yang akan dikontrol
kecepatannya untuk mengatur udara dingin yang akan disalurkan ke ruangan. Kipas
yang tidak dikontrol kecepatannya akan menginputkan udara dingin terus menerus
keruangan tanpa ada kontrol yang membatasi selama kipas tersebut on. Oleh karena
itu dibuat pengontrol kecepatan kipas, agar udara yang disalurkan sesuai dengan yang
dibutuhkan ruangan (sampai set point yang diinputkan) dan diharapkan dapat
mengontrol kecepatan dengan step kecil dan respon yang baik. Sebagai pengendali
intensitas cahaya digunakan mikrokontroller AT89S52 dengan sensor PIR yang
menteksi adanya manusia dalam ruangan yang akan menyalakan kipas secara
2.2 Sensor PIR (Passive Infra Red)
2.2.1 Infra Merah
Cahaya merupakan suatu bentuk radiasi dari gelombang elektromagnetik yang pada
prinsipnya sama dengan gelombang radio, misalnya infrared, ultraviolet, dan
sinar-dimana yang membedakannya adalah panjang gelombang dan frekuensinya. Panjang
gelombang dari cahaya tampak yakni 400 nm hingga 800 nm, dan ultraviolet memiliki
panjang gelombang lebih pendek dari 400 nm, sedangkan sinar infra merah
mempunyai panjang gelombang antara 0,76 μm – 100 μm. Dalam beberapa kasus,
panjang gelombangnya bisa mencapai 3 μm – 100 μm yang disebut far-infrared.
Hubungan antara frekuensi dan panjang gelombang dapat dirumuskan dengan:
λ=�� Dimana :
c ≅ 3 x 108 m/s= kecepatan gelombang elektromagnetik dalam vakum
λ = panjang gelombang (m)
ƒ = frekuensi (Hz)
Karakteristik cahaya Foton dapat ditemukan dalam gelombang
elektromagnetik pada frekuensi partikular dalam kuantisasi diskrit energi. Jika
beberapa sumber mengeluarkan energi dari satu frekuensi , maka dinamakan quanta.
Inilah yang dinamakan foton. Dirumuskan:
��=��λ =��
Infra merah dapat digunakan untuk memancarkan data maupun sinyal suara
dimana keduanya membutuhkan sinyal carier untuk membawa sinyal data maupun
digunakan rangkaian voltage to frekwensi converter yang berfungsi untuk mengubah
tegangan sinyal suara menjadi frekuensi.
2.2.2 Pengenalan Sensor PIR
PIR (Passive Infra Red) merupakan sebuah sensor berbasiskan infrared. Akan tetapi,
tidak seperti sensor infrared kebanyakan yang terdiri dari LED Inframerah dan
fototransistor. PIR tidak memancarkan apapun seperti LED Inframerah. Sesuai dengan
namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah
pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang bisa
dideteksi oleh sensor ini biasanya adalah tubuh manusia.
Gambar 2.1 Bentuk fisik PIR
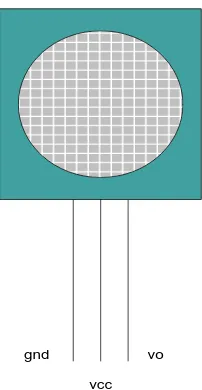
2.2.3 Fungsi Pin Sensor PIR
Berikut ini adalah susunan pin/kaki dari pin-pin Sensor PIR yaitu:
Tabel 2.1 Fungsi pin Sensor PIR Sensor PIR Port Control
O/P Pin 4(I1)
V+ Pin 1 (VCC)
GND Pin 2(GND)
gnd vcc
vo
Gambar 2.2 Pin Sensor PIR
2.2.4 Cara Kerja Sensor PIR
Sensor PIR hanya bereaksi pada tubuh manusia hal ini disebabkan karena adanya IR
Filter yang menyaring panjang gelombang sinar inframerah pasif. IR Filter mampu
menyaring panjang gelombang sinar inframerah pasif antara 8 µm sampai 14 µm,
sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara
9 µm sampai 10 µm ini saja yang dapat dideteksi oleh sensor. Misalnya ketika
seseorang berjalan melewati sensor, sensor akan menangkap pancaran sinar
inframerah pasif yang dipancarkan oleh tubuh manusia yang memiliki suhu yang
berbeda dari lingkungan sehingga menyebabkan material pyroelectric bereaksi
menghasilkan arus listrik karena adanya energi panas yang dibawa oleh sinar
inframerah pasif tersebut. Kemudian sebuah sirkuit amplifier yang ada menguatkan
arus tersebut yang kemudian dibandingkan oleh comparator sehingga menghasilkan
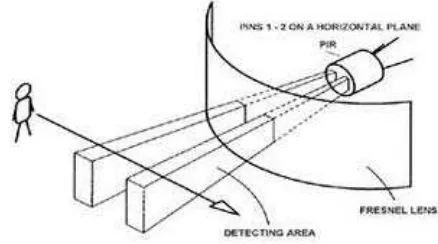
Berikut adalah diagram blok dari sensor PIR:
Gambar 2.3 Diagram
Blok Sensor PIR
Bagian- bagian dari sensor PIR yaitu:
a) Fresnel Lens
b) IR Filter
c) Pyroelectric sensor
d) Amplifier e) Comparator
Sensor PIR ini bekerja dengan menangkap energi panas yang dihasilkan dari
pancaran sinar inframerah pasif yang dimiliki setiap benda dengan suhu benda diatas
nol mutlak. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh
Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan
Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate
menghasilkan arus listrik hal ini disebabkan pancaran sinar inframerah pasif ini
membawa energi panas. Prosesnya hampir sama seperti arus listrik yang terbentuk
ketika sinar matahari mengenai solar cell.
Sensor PIR hanya bereaksi pada tubuh manusia hal ini disebabkan karena
adanya IR Filter yang menyaring panjang gelombang sinar inframerah pasif. IR Filter
mampu menyaring panjang gelombang sinar inframerah pasif antara 8 µm sampai 14
µm, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar
antara 9 µm sampai 10 µm ini saja yang dapat dideteksi oleh sensor. Misalnya ketika
seseorang berjalan melewati sensor, sensor akan menangkap pancaran sinar
inframerah pasif yang dipancarkan oleh tubuh manusia yang memiliki suhu yang
menghasilkan arus listrik karena adanya energi panas yang dibawa oleh sinar
inframerah pasif tersebut. Kemudian sebuah sirkuit amplifier yang ada menguatkan
arus tersebut yang kemudian dibandingkan oleh comparator sehingga menghasilkan
output.
Gambar 2.4 Sebuah Objek melewati sensor PIR
Seperti yang ditunjukkan pada Gambar 2.4 ketika ada sebuah objek melewati
sensor, pancaran radiasi infra merah pasif yang dihasilkan akan dihasilkan akan
dideteksi oleh sensor. Energi panas yang dibawa oleh sinar infra merah pasif ini
menyebabkan aktif material pyroelektric di dalam sensor yang kemudian
menghasilkan arus listrik. Ketika manusia berada di depan sensor PIR dengan kondisi
diam, maka sensor PIR akan menghitung panjang gelombang yang dihasilkan oleh
tubuh manusia tersebut. Panjang gelombang yang konstan ini menyebabkan energi
panas yang dihasilkan dapat digambarkan hampir sama pada kondisi lingkungan
disekitarnya. Ketika manusia itu melakukan gerakan, maka tubuh manusia itu akan
menghasilkan pancaran sinar inframerah pasif dengan panjang gelombang yang
bervariasi sehingga menghasilkan panas berbeda yang menyebabkan sensor merespon
dengan cara menghasilkan arus pada material Pyroelectricnya dengan besaran yang
berbeda beda. Karena besaran yang berbeda inilah comparator menghasilkan output.
Jadi sensor PIR tidak akan menghasilkan output apabila sensor ini dihadapkan dengan
benda panas yang tidak memiliki panjang gelombang inframerah antara 8 µm sampai
14 µm
Secara umum penggunaan PIR untuk aplikasi tadi hampir sama,sensor ini
banyak di gunakan untuk security system, lighting control, temperature system dan
pintu otomatis.Misalnya sensor ini digunakan untuk lighting control dan temperature
manusia dan kemudian menghidupkan lampu atau menghidupkan kipas dan ketika
tidak ada orang yang dideteksi lampu akan mati. Masalah penempatan sensor juga
harus diperhitungkan, jangan sampai ketika orang sudah ada di dalam ruangan tapi
belum terdeteksi sehingga lampu tidak juga menyala atau kipas tidak juga menyala
PIR untuk aplikasi lighting control dan temperature control tidak memerlukan power
supply karena sensor ini langsung di koneksi langsung ke installasi listrik dengan
sumber tegangan 220VAC.
2.3 Fotodioda
Photodioda adalah dioda sambungan p-n yang secara khusus dirancang untuk
mendeteksi cahaya yang biasnya terdapat pada lapisan instrinsik adntara lapisan n dan
p. Piranti yang memiliki lapisan intrinsik tersebut disebut p-i-n atau PIN photodioda.
Energi cahanya lewat melewati lensa yang mengekspos sambungan.
Photodioda dirancang beroperasi pada mode bias-balik. Arus bocor bias balik
mengingkat dengan peningkatan level cahaya. Harga arus umumnya adalah dalam
rentang mikroampere. Photodioda mempunyai respon waktu yang cepat terhadap
berbagai cahaya.
Photodioda merupakan komponen yang dapat mengubah energi cahaya
Inframerah menjadi pulsa-pulsa sinyal listrik yang kualitasnya cukup baik. Semakin
besar intensitas cahaya inframerah yang diterima maka sinyal pulsa listrik yang
dihasilkan akan cukup baik. Pada prakteknya sinyal inframerah yang dierima
intensitasnya sangat kecil sehingga diperlukan sebuah penguat. Ketika photodioda
mendapat cahaya inframerah maka terdapat arus bocor yang relative kecil. Besar
kecilnya arus bocor ini bergantung kepada intensitas cahaya inframerah yang
mengenai fotodioda tersebut. Arus bocor yang dihasilkan fotodioda besarnya linier
terhadap intensitas cahaya inframerah yang dimaksukkan dalam daerah penerimaan.
Oleh sebab itu arus diubah menjadi tengangan agar didapatkan sinyalnya kembali.
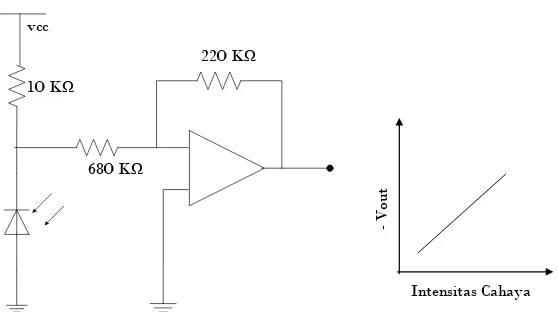
Untuk teknik pengubahan arus menjadi tegangan dapat dilihat pada gambar berikut
vcc
1O KΩ
22O KΩ
68O KΩ
-
Vo
ut
Intensitas Cahaya
Gambar 2.5 Rangakaian Photodioda dan Grafik Lineraritasnya
Untuk mengubah arus menjadi tegangan digunakan sebuah resistor R1 dengan
niali yang cukup besar. Besarnya nilai R harus disesuaikan agar tidak menyebabkan
diode inframerah jenuh karena jika diode infra merah jenuh maka tidak ada sinyal
carier yang diteruskan sehingga data yang ditransmisikan tidak dapat diterima lagi.
Untuk mencegah agar tidak jenuh maka tegangan bias tidak boleh terlalu tinggi dan
nilai R tidak boleh terlalu besar. Pada suatu kondisi tertentu jika cahaya selain cahaya
inframerah terlalu terang arus bocor dapat mencapai beberapa milliamper dan
resistansinya turun menjadi 10k sehingga untuk mencegah saturasi maka nilai R harus
kurang daru 10. Dengan nilai R 10k ini dapat merubah tiap 10µA menjadi 10mV.
Kondisi Ideal yang jauh berbeda dengan keaadan sebenarnya dimana sinyal yang
diterima sangat lemah sehingga menghasilkan arus bocor yang sangat kecil sehingga
R yang digunakan juga harus diganti dengan niali yang lebih besar untuk dapat
2.4 Mikrokontroller AT89S52
Mikrokontroller AT89S52 adalah salah satu anggota dari keluarga MCS-51/52 yang
dilengkapi dengan internal 8 Kbyte Flash PEROM (Programmable and Erasable
Read Only Memory), yang memungkinkan memori program untuk dapat diprogram
kembali. AT89S52 dirancang oleh Atmel sesuai dengan instruksi standar dan susunan
pin 80C5. Mikrokontroller berteknologi memori non-volatile berkerapatan tinggi dari
atmel ini mempunyai jumlah pin sebanyak 40 pin.
2.4.1 Sistem Minimum Mikrokontroller AT89S52
Mikrokontroller AT89S52 hanya memerlukan tambahan 3 buah kapasitor, 1 resistor ,1
kristal dan catudaya 5 V. Kapasitor 10 µF dan resistor 8k2Ω dibentuk rangkaian reset.
Dengan adanya rangkaian reset ini mmikrokontroller At89S52 ini otomatis direset
setelah menerima catudaya. Kristal dengan Frekuensi maksimum 11,0592 MHz dan
kapasitor 30 pF dipakai untuk melengkapi rangkaian oscillator pembentuk clock yang
menentukan kecepatan kerja mikrokontroller mAt89S52.
Mikrokontroller AT89S52 memerlukan daya yang rendah dengan penampilan
yang baik dengan menggunakan pengisi sistem yang dapat diprogram dengan mudah
melalui ISP Memory Flash. Komputer dengan mikrokontroller dapat berhubungan
secara langsung hanya dengan menggunakan kabel antar muka (konektor paralel).
Dengan ISP Memory Flash mengijinkan program yang telah dibuat dapat diganti
dengan program yang baru dengan cara menghapus data yang ada pada
mikrokontroller lalu mengisi dengan program baru.
Mikrokontroller AT89S52 memiliki :
1. Sebuah CPU ( Central Processing Unit ) 8 Bit.
2. 256 byte RAM ( Random Acces Memory ) internal.
3. Empat buah port I/O, yang masing masing terdiri dari 8 bit
4. Osilator internal dan rangkaian pewaktu.
5. Dua buah timer/counter 16 bit
7. Sebuah port serial dengan full duplex UART (Universal Asynchronous
Receiver Transmitter).
8. Mampu melaksanakan proses perkalian, pembagian, dan Boolean.
9. EPROM yang besarnya 8 KByte untuk memori program.
10.Kecepatan maksimum pelaksanaan instruksi per siklus adalah 0,5 μs pada
frekuensi
11.clock 24 MHz. Apabila frekuensi clock mikrokontroller yang digunakan adalah
12 MHz, maka kecepatan pelaksanaan instruksi adalah 1 μs
2.4.2 Arsitektur Mikrokontroller AT89S52
Di dalam mikrokontroller AT89S52, sudah terdiri dari:
1. Kompatibel dengan produk MCS-51
2. 8 Kbite In-System Reprogammable Flash Memory
3. Daya tahan 1000 kali baca/tulis
4. Fully Static Operation : 0 Hz dan 24 MHz
5. 128 x 8 bit RAM
6. 32 jalur I/O
7. Tiga level kunci program
8. Enam sumber interupt
9. Jalur serial dengan UART
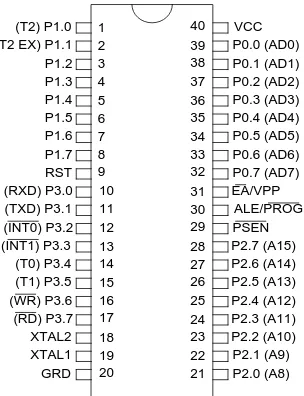
2.4.3 Konfigurasi Pin Mikrokontroller AT89S52
1
Gambar 2.6 Deskripsi Pin AT89S52
Berikut ini adalah susunan pin/kaki dari Mikrokontroller AT89S52 yaitu:
1. VCC (Pin 40) merupakan Suplay tegangan 5 Volt
2. GND (Pin 20)adalah Ground
3. Port 0 (Pin 39 – Pin 32) dimana Port 0 yang merupakan saluran/bus I/O 8 bit open
colector, dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data
selama adanya akses ke memori program eksternal.
4. Port 1 (Pin 1 – Pin 8) dimana Port 1 yang merupakan saluran/bus I/O 8 bit dua arah
yang di dalamnya terdapat Mosi, Miso dan Sck sebagai masukan dari ISP Programer
yang terhubung ke komputer.
5. Port 2 (Pin 21 – Pin 28), Port 2 yang merupakan saluran/bus I/O 8 bit dua arah dengan
internal pull-ups dan berfungsi memberikan logika 1.
6. Port 3 (Pin 10 – Pin 17), Port 3 merupakan saluran/bus I/O 8 bit dua arah dengan
internal pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai,
maka ini dapat digunakan sebagai port paralel 8 bit serbaguna
Tabel 2.2 Konfigurasi Port 3 mikrokontroller AT89S52 Nama Pin Fungsi
P3.0 (Pin 10) RXD alamat B0H; Untuk menerima data port serial
P3.1(Pin 11) TXD alamat B1H; Untuk mengirim data port serial
P3.2(Pin 12) INT0 alamat B2H; Interupsi eksternal 0
P3. 4(Pin 14) T0 alamat B4H; Input Eksternal waktu/pencacah 0
P3.5(Pin 15) T1 alamat B5H; Input Eksternal waktu/pencacah 1
P3.6(Pin 16) WR alamat B6H; Jalur menulis memori data eksternal
P3.7(Pin 17) RD alamat B7H; Jalur membaca memori data eksternal
7. RST (Pin 9), Reset akan aktif dengan memberikan high selama 2 cylce.
8. ALE/PROG (Pin 30), Address Latch Enable (ALE)/PROG merupakan penahan alamat
memori eksternal (pada port 1) selama mengakses ke memori eksternal. Pin ini juga
sebagai pulsa/sinyal input pemograman (PROG) selama proses pemograman
9. PSEN (PIN 29), Program Store Enable (PSEN) merupakan sinyal pengontrol untuk
mengakses program memori eksternal masuk ke dalam bus selama proses
pemberian/pengambilan instruksi (fetching).
10.EA (Pin 31), External Access Enable (EA) merupakan sinyal kontrol untuk
pembacaan memori program. Apabila diset rendah (L) maka mikrokontroller akan
melaksanakan seluruh instruksi dari memori program eksternal sedangkan apabila
diset tinggi (H) maka mikrokontroller akan melaksanakan instruksi dari memori
program internal ketika isi program
11.XTAL1 (Pin 19), Input untuk Clock Internal
2.4.4 Struktur Memori
Struktur memori pada Mikrokontroller AT89S52 dapat dilihat pada gambar 2.7 di
bawah ini:
Gambar 2.7 Struktur Memori Mikrokontroller AT89S52
Memori dari AT89S52 terbagi menjadi :
a. RAM Internal, terdapat memori sebesar 128 byte yang biasanya digunakan untuk
menyimpan variable atau data yang bersifat sementara.
b. Register bank, mikrokontroller AT89S52 mempunyai delapan buah register yang
terdiri dari R0 hingga R7. Kedelapan register ini selalu terletak pada alamat 00h
hingga 07h setiap kali sistem reset.
c. Bit addressable RAM, atau sering juga disebut Scratch Pad Area adalah ruang data
memory yang bebas digynakan user sebagai tempat penyimpanan variable atau
sebagai alamat inisialisasi Stack Pointer. Berbeda dengan General Purpose RAM,
d. General Purpose RAM digunakan untuk keperluan umum dimulai dari alamat 30h
hingga 7Fh dan dapat diakses dengan pengalamatan langsung maupun tidak langsung.
Pengalamatan langsung dilakukan ketika salah satu operand bilangan yang
menunjukan lokasi yang diamati. Sedangkan pengalamatan secara tak langsung pada
lokasi dari RAM internal ini adalah akses data dari memori ketiga alamat memori
tersebut tersimpan dalam suatu register R0 atau R1.
e. Register Fungsi Khusus, mikrokontroller AT89S52 mempunyai 21 Special Function
Register yang terletak pada antara alamat 80h hingga FFh. Beberapa dari
register-register ini mampu dialamati dengan pengalamatan bit sehingga dapat dioperasikan
seperti yang ada pada RAM yang lokasinya dapat dialamati dengan pengalamatan bit.
Adapun yang menjadi register khusus yaitu :
1. Accumulator, merupakan register ini terletak pada alamat E0hm, register ini
digunanakan untuk operasi aritmatik,operasi logika dan untuk proses pengambilan dan
pengiriman data ke memori eksternal
2. Port, AT89S52 mempunyai empat buah port yaitu port 0, port 1, port 2, port 3 yang
terletak pada alamat 80h, 90h, A0h, dan B0h. namun jika digunakan eksternal memori
ataupun fungsi-fungsi special, seperti eksternal interup, serial ataupun eksternal timer,
port 0, port 2, dan port 3 tidak dapat digunakan sebagai port dengan fungsi umum.
Untuk itu disediakan port 1yang dikhususkan untuk port dengan fungsi umum.
3. Program Status Word atau PSW, terletak pada alamat D0h yang terdiri atas beberapa
bit, seperti pada gambar 2.8
PSW 7 PSW 6 PSW 5 PSW 4 PSW 3 PSW 2 PSW 1 PSW0
CY AC F0 RS1 RS0 0V - P
Gambar 2.8 Alokasi bit PSW
2.4.5 Organisasi Memori
Semua serpih tunggal dalam keluarga MCS-51 memiliki pembagian ruang alamat
memperbolehkan memori data untuk diakses oleh alamat 8 bit. Sekalipun demikian,
alamat data memori 16 bit dapat dihasilkan melalui register DPTR (Data Point
Gambar 2.9 Arsitektur memori mikrokontroller AT89S52
a. Memori Program
Pada EPROM 8 Kbyte, jika EA (External Access) bernilai tinggi, maka program akan
menempati alamat 0000 H sampai 0FFF H secara internal.
b. Memori Data
Memori data internal dipetakan seperti pada gambar di bawah ini ruang memorinya
menjadi tiga blok yaitu bagian 128 bawah, 128 atas, dan ruang SFR (Special Function
Register)
Gambar 2.10 Pengalamatan Pada mikrokonroller AT89S52
Bagian RAM 128 byte bawah dipetakan menjadi 32 byte bawah
dikelompokkan menjadi 4 bank dan 8 register (R0 sampai R7). Pada bagian 16 byte
berikutnya, di atas bank-bank register, membentuk suatu blok ruang memori yang bisa
teralamati per bit (bit addressable). Alamat alamat bit ini adalah 00 H hingga 7F H.
Semua byte yang berada di dalam 128 bawah dapat diakses baik secara langsung
tidak langsung. Bagian 128 atas dari RAM hanya ada di dalam piranti yang memiliki
RAM 256 byte.
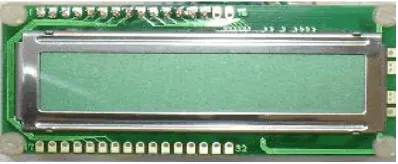
2.5 Modul LCD (Liquid Cristal Display)
Modul LCD merupakan modul keluaran yang digunakan sebagai tampilan pada
aplikasi pengontrol suhu. Modul ini menggunakan LCD jenis M1632 yang
mempunyai ukuran 2x16, maksudnya bahwa tampilan LCD mampu menampilkan 16
karakter dalam dua baris tampilan, sehingga tampilan yang dihasilkan sejumlah 32
karakter.
Gambar 2.11 LCD character 2x16
LCD display module M1632 terdiri dari dua bagian, yang pertama merupakan
panel LCD sebagai media penampil informasi dalam bentuk huruf/ angka dua baris,
masing – masing baris bisa menampung 16 huruf/ angka.
2.5.1 Spesifikasi LCD M1632
Beberapa Spesifikasi dari LCD (Liquid Cristal Display) M1632:
1. Tampilan 16 karakter 2 baris dengan matrik 5 x 7 + kursor.
2. ROM pembangkit karakter 192 jenis.
3. RAM pembangkit karakter 8 jenis ( diprogram pemakai ).
4. RAM data tampilan 80 x 8 bit ( 8 karakter ).
5. Duty ratio 1/16.
6. RAM data tampilan dan RAM pembangkit karakter dapat dibaca dari unit
7. Beberapa fungsi perintah antara lain adalah penghapusan tampilan (display clear),
posisi krusor awal (crusor home), tampilan karakter kedip (display character blink ),
pengeseran krusor (crusor shift) dan penggeseran tampilan (display shif ).
8. Rangkaian pembangkit detak.
9. Rangkaian otomatis reset saat daya dinyalakan.
10.Catu daya tunggal +5 volt.
Diagram blok tampilan LCD (Liquid Cristal Display) dapat dilihat pada gambar
2.15 di bawah ini.
Gambar 2.12 Diagram Blok LCD
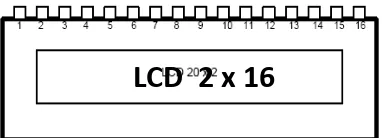
2.5.2 Konfigurasi Pin LCD
Modul ini menggunakan LCD jenis M1632 yang mempunyai ukuran 2 x 16
maksudnya bahwa tampilan LCD mampu menampilkan 16 karakter dalam dua baris
tampilan, sehingga tampilan yang dihasilkan sejumlah 32 karakter. Rangkaian Modul
LCD diperlihatkan pada gambar 2.13 di bawah ini.
Gambar 2.13 Konfigurasi pin LCD 2 x 16
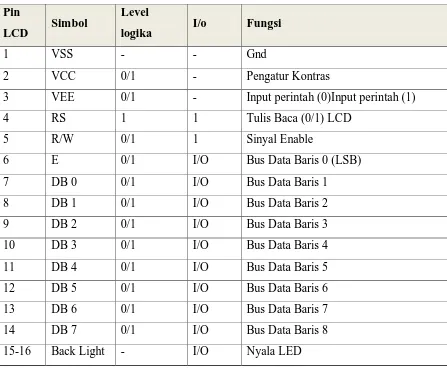
Pada gambar 2.13 diatas diperlihatkan rangkaian modul LCD yang akan
dihubungkan dengan mikrokontroler, dimana didalamnya terdapat 16 terminal yang
mempunyai fungsi masing-masing, yaitu :
Tabel 2.3 Pin pada Tampilan LCD
Pin
2.5.3 Stuktur Memori LCD
Modul LCD M1632 memiliki beberapa jenis memori yang digunakan untuk
menyimpan atau memproses data-data yaitu :
1. DDRAM (Display Data Random Accsees Memory), merupakan memori tempat
karakter yang akan ditampilkan berada. Contoh karakter “A” atau 41h yang ditulis
pada alamat 00 akan tampil pada baris pertama kolom pertama dari LCD. Apabila
karakter tersebut ditulis pada alamat 40h, karakter tersebut akan tammpil pada baris
2. CGRAM(Character Generatr Random Accsees Memory), merupakan memori untuk
menggambarkan pola sebuah karakter dan bentuk karakter dapat diubah-ubah sesuai
dengan keinginan. Akan tetapi isi memori akan hilang pada saat Power Supply tidak
aktif sebingga pola karakter hilang.
3. CGROM (Character Generator Data Read Only Memory), merupakan memori untuk
menggambarkan pola sebuah karakter dimana pola tersebut sudah ditentukan secara
permanen dari HD44780 sehingga pengguna tidak dapat mengubah lagi , pola karakter
tersebutpun tidak akan hilang walaupun power supply tidak aktif.
Beberapa perintah dasar yang harus dipahami adalah instalasi LCD Charakter:
1. Function Set berfungsi untuk mengatur interdace lebar data, jumlah dari baris dan
ukuran font karakter.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 1 DL N F X X
Dimana:
X = Don’t care
DL: mengatur lebar data
DL = 1, lebar data interface 8 bit (DB7 s/d DB0)
DL = 0, lebar data interface 4 bit (DB7 s/d DB4)
Ketika menggunakan lebar data 4 bit, data harus dikirim dua kali
N: Pengaktifan baris
N = 0, 1 baris
N=1, 2 baris
F: Penentuan ukuran font karakter
F = 0, 5 x 7
F = 1, 5 x 8
2. Entry Mode berfungsi mengatur increament/decrement dan mode geser
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 1 I/D S
Dimana:
I/D : Increment/ decrement dari alamat DDRAM dengan 1 ketika kode karakter
dituliskan ke DDRAM.
I/D = 1, increment
S: Geser keseluruhan display ke kanan dan kiri
S = 1, geser ke kiri atau ke kanan bergantung pada I/D
S = 0, display tidak bergeser
3. Display On/Off berfungsi untuk mengatur status display ON atau OFF, cursor
ON/OFF dan fungsi kursor Blink
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 D C B
Dimana:
D: mengatur Dislay
D= 1, Display is ON
D= 0, Display OFF
Pada kasus ini data display masih tetap berada di DDRAM dan dapat ditampilkan
kembali secara langsung dengan mengatur D=1
C: Menampilkan Kursor
C = 1, Kursor ditampilkan
C = 0, Kursor yang akan ditampilkan
B : Karakter ditunjukkan dengan kursor yang berkedio
B = 1, kursor blink.
4. Clear Display berfungsi sebagai perinteh untuk menghapus layar
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 0 0 1
5. Geser Kursor dan Display berfumngsi untuk menggeser posisi kursor atau display ke
ke kanan atau ke kiri tanpa menulis atau membaca data display. Fungsi ini digunakan
untuk koreksi atau pencarian display.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 1 S/C R/L X X
Catatan:
X = Don’t care
0 0 Shift Cursor position to the left
0 1 Shift Cursor position to the right
1 0 Shift the entire position to the left
1 1 Shift the entire position to the right
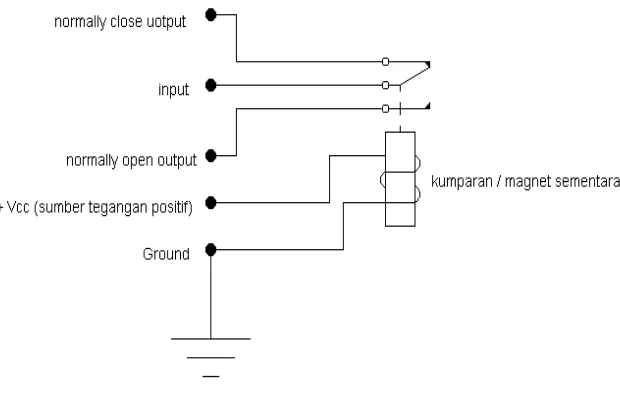
2.6 Relay
Relay adalah suatu komponen elektronik yang berfungsi sebagai saklar
elektromagnetik. Prinsip kerja dasar komponen ini adalah penggunaan lilitan kawat
untuk menghasilkan medan elektromagnetik disekitar lilitan tersebut. Atau dengan
kata lain relay hanya dapat berfungsi sebagai saklar on / off yang diatur oleh adanya
gaya magnet dari kumparan yang dialiri arus.
Relay dapat dibedakan atas perbedaan nilai tegangan ambang yang digunakan
untuk mengaktifkannya. Biasanya relay yang ada di pasaran dapat berjenis relay 6 volt
dan 12 volt. Arus yang digunakan pada rangkaian relay adalah arus DC. Konstruksi
dalam suatu relay terdiri dari lilitan kawat (coil) yang dililitkan pada inti besi lunak.
Apabila lilitan kawat mendapatkan suplay arus listrik maka inti besi lunak akan
kontak dan terjadi medan elektromagnetik disekitar lilitan yang akan menarik kedua
switch penghantar untuk menjadi bersatu atau menjadi terpisah tergantung jenis relay
yang digunakan. Keadaan ini akan bertahan selama arus mengalir pada kumparan
relay. Relay akan kembali pada posisi semula bila tidak ada lagi arus yang mengalir
padanya. Posisi normal relay tergantung pada jenis relay yang digunakan dan
Gambar 2.14 Skema Relay
Apabila arus listrik dimasukkan pada + Vcc maka kumparan pada relay akan
bekerja yaitu terjadinya kemagnetan pada kumparan sehigga akan menarik saklar yang
terbuat dari bahan logam sehingga pada normally open output akan terhubung dengan
pin input, demikian sebaliknya .
Menurut kerjanya relay dapat dibedakan menjadi :
1. Normally Open (NO)
Relay yang berfungsi sebagai saklar yang selalu dalam keadaan terbuka bila tidak
diberikan tegangan dan tertutup apabila mendapat tegangan sesuai dengan tegangan
ambangnya.
2. Normally Close (NC)
Relay yang berfungsi sebagai saklar yang selalu dalam keadaan tertutup bila tidak
diberikan tegangan dan terbuka apabila mendapat tegangan sesuai dengan tegangan
ambangnya, misalnya 6 Volt.
3. Change Over (CO)
Relay ini mempunyai saklar tunggal yang normalnya tertutup, apabila kumparan 1
dialiri arus maka saklar akan terhubung ke terminal A dan sebaliknya bila kumparan 2
2.7 Sensor Suhu IC LM35
Sensor suhu LM35 berfungsi untuk mengubah besaran fisis yang berupa suhu
menjadi besaran elekris tegangan. Sensor ini memiliki parameter bahwa setiap
kenaikan 1°C tegangan keluarannya naik sebesar 10mV dengan batas maksimal
keluaran sensor adalah 1,5V pada suhu 150°C.
Sensor suhu IC LM 35 ialah sensor temperatur paling banyak digunakan
karena selain harganya cukup murah, linearitasnya juga lumayan bagus. LM35 tidak
membutuhkan kalibrasi eksternal yang menyediakan akurasi ± ¼ °C pada temperatur
ruangan dan ± ¾ °C pada kisaran -55 °C to +150 °C. LM35 dimaksudkan untuk
beroperasi pada -55 °C hingga +150 °C, sedangkan LM35C pada -40 °C hingga
+110 °C, dan LM35D pada kisran 0-100°C. LM35D juga tersedia pada paket 8 kaki
dan paket TO-220. Sensor LM35 umumnya akan naik sebesar 10mV setiap kenaikan
1°C (300mV pada 30 °C).
Gambar 2. 15 Bentuk Fisik LM 35
IC LM 35 ini tidak memerlukan pengkalibrasian atau penyetelan dari luar
karena ketelitiannya sampai lebih kurang seperempat derajat celcius pada temperature
ruang. Jangka sensor mulai dari – 55°C sampai dengan 150°C, IC LM35
penggunaannya sangat mudah, difungsikan sebagai kontrol dari indicator tampilan
catu daya terbelah. IC LM 35 dapat dialiri arus 60 m A dari supplay sehingga panas
Gambar 2.16 Rangkaian pengukur suhu
Sensor suhu IC LM 35 merupakan IC sensor temperatur yang akurat yang
tegangan keluarannya linear dalam satuan celcius. Jadi LM35 memilik kelebihan
dibandingkan sensor temperatur linear dalam satuan kelvin, karena tidak memerlukan
pembagian dengan konstanta tegangan yang besar dan keluarannya untuk
mendapatkan nilai dalam satuan celcius yang tepat. Sensor suhu IC LM 35 memiliki
impedansi keluaran yang rendah, keluaran yang linear, dan sifat ketepatan dalam
pengujian membuat proses interface untuk membaca atau mengotrol sirkuit lebuh
mudah. Pin V+ dari Sensor suhu IC LM 35 dihubungkan kecatu daya, pin GND
dihubungkan ke Ground dan pin Vout- yang menghasilkan tegangan analog hasil
pengindera suhu dihubungkan ke vin (+) dan ADC 0840.
2.7.1 Prinsip Kerja Sensor suhu IC LM 35
Sensor suhu IC LM 35 merupakan IC yang digunakan sebagai sensor suhu. IC
tersebut mengubah kondisi suhu lingkungan disekitarnya menjadi sinyal listrik. Sinyal
listrik keluaran Sensor suhu IC LM 35 ini memiliki nilai yang sebanding dengan suhu
lingkungan dalam bentuk derajat celcius (ºC). Kerja dari sensor suhu LM35 ini adalah
perubahan nilai tahanannya akan semakin besar apabila suhu lingkungannya semakin
rendah dan nilai tahanannya akan menjadi kecil apabila suhu lingkungannya semakin
tinggi. Maka adanya perubahan suhu akan menyebabkan nilai tahanan dari LM35 juga
akan berubah. Pada saat LM35 aktif elektron-elektron pada pita valensi akan
melakukan pergerakan dari katoda ke anoda sehingga menimbulkan perbedaan
potensial. Perbedaan potensial inilah yang menjadi tegangan keluaran dari LM35.
tegangan LM35 akan semakin kecil jika nilai suhu yang dibaca kecil. LM35 memiliki
tingkat kelinieran yang tinggi dimana kenaikan 1ºC akan menghasilkan tegangan
sebesar 10mV atau 10 mVolt/ºC.
2.8 ADC (Analog to Digital Converter)
Analog to Digital Converter (ADC) adalah sebuah piranti yang dirancang untuk
mengubah sinyal-sinyal analog menjadi sinyal-sinyal digital. Proses pengubahan ini
dikenal juga dengan nama sistem akusisi data. ADC merupakan piranti masukan,
artinya mikrokontroler mendapatkan data dari ADC. ADC memerlukan sinyal write
dan read. Sinyal write digunakan sebagai perintah bagi ADC untuk memulai konversi.
A/D Converter ini dapat dipasang sebagai pengonversi tegangan analog dari suatu
peralatan sensor ke konfigurasi digital yang akan diumpankan ke suatu sistem
minimum. Terdapat 4 macam ADC yang memenuhi standar industri, yaitu integrating,
tracking, flash/parallel dan successive approximation
Jenis 0804 ini merupakan ADC yang sederhana dan mudah digunakan. IC
ADC 0804 ini mempunyai 20 pin dengan konfigurasi seperti gambar berikut :
Gambar 2.17 Konfigurasi Pin IC ADC 0804
Pada ADC 0804 ini, terdapat dua jenis prinsip didalam melakukan konversi, yaitu
free running dan mode control. Pada mode free running, ADC akan mengeluarkan
data hasil pembacaan input secara otomatis dan berkelanjutan (continue). Prinsip yang
kedua yaitu mode control, pada mode ini ADC baru akan memulai konversi setelah
rendah kepada masukan WR sesaat, kemudian membaca keluaran data ADC setelah
keluaran INTR berlogika rendah. Pada penelitian ini, prinsip konversi yang digunakan
adalah mode control.
Secara umum Rangkaian di dalam IC ADC memiliki 2 bagian utama, yaitu:
1. Bagian Sampling dan Hold, yang berfungsi menangkap atau menahan tagangan
analog input sesaat untuk seterusnya diumpankan ke rangkaian pengonversi.
2. Rangkaian Konversi A/D (plus rangkaian kontrolnya).
ADC memerlukan bantuan sekuensi kontrol untuk menangkap dan
mengkonversi sinyal. Seberapa lama ADC dapat sukses mengkonversi suatu nilai
sangat tergantung dari kemampuan sampling dan konversi dalam domain waktu.
Makin cepat prosesnya, makin berkualitas pula ADC tersebut. Karena inilah maka
karakteristik ADC yang paling penting adalah waktu konversi (conversion time).
Namun demikian, kemampuan riil ADC dalam kontrol loop tertutup dalam sebuah
sistem lengkap justru sangat dipengaruhi oleh kemampuan kontroler atau prosesor
dalam mengolah data input-output secara cepat, dan bukan hanya karena kualitas
2.9 Perangkat Lunak
2.9.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram Mikrokontroller AT89S52 adalah bahasa
assembly untuk MCS-51 yang merupakan salah satu keluaran dari mikrokontroller
yang menggunakan teknologi CMOS. Angka 51 merupakn jumlah instruksi pada
bahasa ini hanya 51 instruksi.
Keluarga MCS-51 mempunyai berbagai macam yang dikelompokkan antara lain:
a. Tegangan Kerja
Tegangan kerja AT89L55 buatan Atmel dapat beroperasi pada tegangan 2,7 V sampai
6 V. Dari seri P89LPC9XX buatan Philips dapat beropepeasri pada tengangan 2,5 V
samapi 3,6 V
b. Memori
Beberapa tipe memori pada MCS-51:
1. One Time Programmable (OTP) / Mask ROM (Read Only Memory)
2. MTP Flash / EEPROM
3. Multiple Time Programmable (MTP) Ultra-Violet Eraseble Programmable ROM
(UVEPROM)
c. Fungsi Khusus
Beberapa fungsi pada MCS-51 antara lain:
1. C8051F20 buatan Cygnal memiliki ADC hingga 12 bit 32 chanel
2. ATmega8535 ADC 10 bit 8 chanel. Fitur ini terdapat pada kit DT51 AVR low cost
3. P8LPC768 buatan Philips memiliki 8 keyboard, power on reset dan breown out detect
d. Timer/Counter
Timer/ counter yang dimiliki MCS-51 dapat mencapai 5 buah seperti P8LPC768
buatan Philips, tipe yang lain memiliki fasilitas Pulse Width Modulation (PWM),
Programmable Counter Array (PCA) dan Wathdog Timer
Assembler adalah sebuah program yang membaca file teks dari instruksi assembly dan
dikonversi menjadi kode mesin. Kompiler adalah program juga melakukan
pengkonversian namun untuk bahasa tingkat tinggi. Assembler lebih sederhana
daripada kompiler. Setiap perintah bahasa assembly secara langsung mewakili satu
instruksi mesin. Perintah bahasa tingkat tinggi lebih komplek dan memerlukan banyak
instruksi mesin. Perbedaan penting lainnya antara assembly dan bahasa tingkat tinggi
adalah, bahwa setiap perbedaan jenis CPU akan memiliki instruksi mesin tersendiri
juga akan memiliki bahasa assembly tersendiri pula. Angka 51 merupakan jumlah
instruksi pada bahasa ini hanya ada 51 instruksi. Instruksi-instuksi tersebut antara
lain:
1. Instruksi MOV
Perintah ini merupakan perintah dasar untuk mengisikan nilai ke alamat atau register
tertentu.
Contoh:
mov cx, 02 ; angka 2 disimpan di register cx
mov r0,#20 h ; isikan nilai 20 heksadesimal ke register r0, tanda ‘#’
sebelum bilangan mmenunjukkan bahwa bilangan tersebut
adalah nilai
[100], bx ; isi data dilokasi memomri 100 disimmpan di alamat bx
2. Instruksi CALL
Intruksi ini berfungsi memanggil surutin tertentu.
a. Acall melakukan subrutin yang ditunjuk dengan jangkauan 2 Kbyte
b. Lcall melakukan subrutin yang ditunjuk dengan jangkauan 64 Kbyte
contoh:
3. Instruksi Ret
Intruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil
setelah intruksi acall dilaksanakan.
Contoh:
acall tunda
tunda:
………
ret
4. Intruksi Cjne (Compare and Jump if Not Equal)
Intruksi ini melakukan perbandingan antara data sumber dengan data tujun, bila data
sama akan dilanjutkan pada instruksi berikutnya, jika tidak akan lompat ke alamat
yang dituju.
Contoh:
Cjne @R1,#00h, beda
5. Intruksi Djnz (Dcrement and Jump if Not Zero)
Intruksi ini melakukan operasi pengurangan pada alamat register yang ditunjuk
dengan nilai 1 dan jump jika hasil pengurangan tidak sama dengan 0
Contoh:
Loop:
Djnz 08h, loop
Ret
6. Instruksi Jb (Jump on Bit set)
Jika data bit sama dengan 1 maka program akan melompat ke sub rutin yang ditunjuk
intrusksi jika data sama dengan 0 program akan melanjutkan program di bawahnya.
Contoh:
Jb p2.2, lompat
Add A, 20h
Lompat: dec A
7. Intruksi Jbc (Jump onbit set then clear bit)
Jika data bit sama dengan 1 maka program akan melompat ke sub rutin yang ditunjuk
intrusksi dan sekaligus mengubah bitnya dengan 0
8. Instruksi Jc (Jump on carry)
Jika data bit pada carry flag sama dengan 1 maka program akan melompat ke sub rutin
yang ditunjuk intrusksi jika data sama dengan 0 program akan melanjutkan program di
bawahnya.
9. Intrusksi Jmp
10.Intruksi Jnb (Jump on bit set)
Jika data bit sama dengan 0 maka program akan melompat ke sub rutin yang ditunjuk
intrusksi jika data sama dengan 1 program akan melanjutkan program di bawahnya.
11.Intruski Jnc (Jump on no carry)
Jika data bit pada carry flag sama dengan 0 maka program akan melompat ke sub rutin
yang ditunjuk intrusksi jika data sama dengan 1 program akan melanjutkan program di
bawahnya
12.Intruksi Jnz (Jump if not zero)
Jika data pada akumulator tidak sama dengan 00h maka program akan melompat ke
sub rutin yang ditunjuk intrusksi jika data sama dengan 00h program akan
melanjutkan program di bawahnya
13.Intruksi Jz (Jump if Zero)
Jika data pada akumulator sama dengan 00h maka program akan melanjutkan
program selanjutnya tetapi jika data sama dengan 00h program akan melompat ke sub
rutin yang ditunjuk.
14.Instruksi Clr (Clear)
Intruksi ini akan memberikan data 0 pada register yang ditunjuk.
Contoh:
Clear A ; intruksi ini member data 0 pada A
15.Instruksi Cpl (Complement)
Intruksi ini akan melakukan komplemen register yang ditunjuk.
Contoh:
Cpl A.1 ; data pada A.1 dikomplemenkan
16.Intruksi Subb
Intruksi ini melakukan pengurangan data pada antara dua buah alamat register beserta
dengan bit carry flagnya.
17.Intruksi Setb
Intruksi ini melakukan operasi set pada bit pada alamat yang ditunjuk.
18.Instruksi Aritmatika
Instruksi aritmatika meliputi:
a. Penjumlahan (Addition)
Contoh:
Pada R2 dan hasilnya di simpan di A
b. Pengurangan (Subtraction)
Contoh:
SUB CX, BX ;hasilnya disimpan di CX
DEC CX ;hasil CX = CX + 1
c. Pembandingan (CMP / Comparison)
Contoh:
CMP DL, BL ;bandingkan isi DL dengan BL
d. Perkalian (Multiplication)
Perkalian antara AL (8 bit) atau AX (16 bit) dengan isi reg atau [alamat], hasilnya
disimpan di AX (8 bit) atau DX-AX (16 bit).
contoh:
mul dl ;isi al (8 bit) dikali dengan dl, hasil di ax
mul bx ;isi ax (16 bit) dikali dengan bx, hasil di dx-ax
e. Pembagian (Division)
contoh:
div dl ;isi ax dibagi dl,hasil di al
BAB 3
PERANCANGAN DAN CARA KERJA ALAT
3.1 Diagram Blok Rangkaian
Secara garis besar, diagram blok dari rangkaian aplikasi dari sensor PIR (Passive Infa
Red) untuk pengontrolan suhu ruangan ditunjukkan pada gambar 3.1 berikut di bawah
ini:
Driver Fotodioda
Sensor PIR
Mikrokontroler AT89S52
Relay 1
Relay 2
Relay 3
LCD
Fotodioda Kipas
Sensor Suhu IC LM35
Gambar 3.1 Diagram Blok Rangkaian
Pada gambar 3.1 Diagram Blok aplikasi dari sensor PIR (Passive Infra Red) yang terdiri atas :
1. Driver Fotodioda, dimana LED inframerah yang berfungsi sebagai
menyala secara otomatis, jika pengunjung keluara maka kipas akan
menurunkan kecepatan kipas secara otomatis.
2. Fotodioda berfungsi sebagai receiver untuk mengetahui ada
pengunjung masuk atau keluar.
3. Sensor PIR digunakan untuk mendeteksi ada tidakanya pengunjung
masuk atau keluar dari dalam ruangan.
4. Sensor suhu IC LM 35 akan mendeteksi suhu ruangan dana kan akan
ditamplkan pada LCD setiap pertambahan dan pengurangan
pengunjung.
5. Mikrokontroller AT89S52 digunakan sebagai pengontrol kerja dan
pengolah data yang akan ditampilkan oleh LCD
6. Relay sebagai driver yang berfungsi mengatur level kecepatan kipas,
agar udara yang disalurkan sesuai dengan yang dibutuhkan ruangan
(sampai set point yang diinputkan) dan diharapkan dapat mengontrol
kecepatan dengan step kecil dan respon yang baik.
7. LCD ( Liquid Crystal Display ) berfungsi sebagai penampil data
jumlah pengunjung yang datang dan keluar serta kecepatan kipasnya.
8. Kipas berfungsi sebagai pendingin otomatis yang berkerja sesuai
perintah dari mikrokontroller.
3.2 Rangkaian Photodioda
100
Gambar 3.2 Rangkaian Fotodioda
Fotodioda adalah suatu dioda yang arus reverse-nya berubah bila mendapat
penyinaran, prinsip kerja dari fotodioda adalah apabila sebuah dioda diberi reverse
bias, maka akan mengalir arus yang kecil sekali yang disebut arus reverse malalui
doida tersebut, besarnya arus reverse ini tergantung suhu dan intensitas cahaya yang
jatuh pada deplection layer-nya. Oleh karena itu, dioda ini harus bisa tembus cahaya
agar cahaya dapat mencapai deplection layer-nya sehingga arus reverse yang besarnya
tergantung intensitas cahaya yang menyinarinya. Apabila fotodioda mendapatkan
cahaya, ini menyebabkan timbulnya arus balik I2. Dengan menambahkan
tegangan-tegangan melingkari simpal keluaran
Pada suatu kondisi tertentu jika cahaya selain cahaya inframerah terlalu terang
arus bocor dapat mencapai beberapa mA dan resistansinya turun menjadi 10k
sehingga untuk mencegah saturasi maka nilai R harus kurang daru 10. Dengan nilai R
10k ini dapat merubah tiap 10µA menjadi 10mV. Kondisi Ideal yang jauh berbeda
dengan keaadan sebenarnya dimana sinyal yang diterima sangat lemah sehingga
menghasilkan arus bocor yang sangat kecil sehingga R yang digunakan juga harus
diganti dengan nilai yang lebih besar untuk dapat mengkonversi arus menjadi
3.3 Rangkaian Sensor PIR
Proses kerja sensor ini dilakukan dengan mendeteksi adanya radiasi panas
tubuh manusia yang diubah menjadi perubahan tegangan. Namun perubahan
tegangan pada PIR sangatlah kecil yaitu berkisar pada kisaran 10 hingga 20
milivolt atau bahkan lebih kecil lagi, tetapi dalam Sensor PIR KC7783R ini
telah terdapat penguat penguat non iverting jadi pada rangkaian ini tidak
memerlukan penguat lagi.
Berikut adalah gambar kaki/pin pada sensor PIR (Passive Infra Red)
gnd
vcc vo
Gambar 3.3 Pin Sensor PIR
Pada pin sensor PIR (Pasissive Infra Red) kaki-kai dihubungkan ke
Power Supply melalui Pin 1 (Vcc) dan Pin 2 (ground), sedangkan pad pin 3
(O/P) terhubung ke port P3.0 pada mikrokontroller AT89S52 yang berfungsi
untuk medeteksi ada tidaknya pengunjung dalam hal ini manusia ke dalam
ruangan. Hal ini sangat tergantung dari beberapa faktor yaitu, panas tubuh dari
Gambar 3.4 Kaki koneksi PIR (Pasissive Infra Red)
3.4 Rangkaian Mikrokontroller AT89S52
Rangkaian skematik dan layout PCB sistemm minimum mikrokontroller AT89S52
dapat dilihat pada gambar 3.5 berikut ini:
Pada pin 18 dan pin 19 dihubungankan ke XTAL 11,0592 MHz dan dua buah
kapasitor 30 pF. XTAL ini aka mempengaruhi kecepatan mikrokontroller AT89S52
dalam mengeksekusi setiap perintah dalam program . Pin 9 merupakan masukan reset
(aktif high). Pulsa transisi dari rendah ke tinggi akan mereset mikrokontroller ini. Pin
32 sampa 39 adalah port 0 yang merupakan salauran/bus I/O 8 bit open collector dapat
digunaka juga sebagai multipleks bus alamat rendah dan bus alamat data selama
adanya akses ke memori program eksternal.
Karena fungsi tersebut maka port dihunbungkan dengan resistor array. Jika
mikrokontroller menggunakan memori eksternal, maka penggunaan resistor array
tidak begitu penting. Selain digunakan untuk fungsi dia tas resistor array digunakan
sebagai pull up. Untuk mendownload file heksadesmal ke mikrokontroller, Mosi,
Miso Sck, Reset, Vcc dan Gnd dari kaki mikrokontroller dihubungkan ke RJ45. RJ45
sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer
inilah dihubungkan ke computer melalui parallel port.
Kaki Mosi, Miso Sck, Reset, Vcc dan Gnd pada mikrokontroller terletak pada
kaki 6, 7, 8, 9 40 dan 20. Apabila terjadi keterbalikan pemasangan jalur ke ISP
Programmer, maka mikrokontroller tidak dapat dilakukan karena mikrokontroller
tidak akan bisa merespon.
3.5 Rangkaian Relay
Peracangan rangkaian relay ini berfungsi sebagai scalar elektronik yang dapat
menghidupkan dan mematukan peralaratan elektronik. Pada rangkaian ini digunakan
relay 12 V, ini bereti jika positif relay (kaki 1) dihubungkan ke sumber tengan 12 V
menghasilkan medan magnet ini akan menarik logam yang mengakibatkan scalar
(kaki 3) terhubung ke kaki 4 dan kaki 7 terhubung ke 8. Dengan demikian jika kita
menggunakan kaki 3 dan kaki 4 sebagai scalar untuk menghidupkan kipas dengan cara
mengaktifkan atau menonaktifkan relay.
Gambar 3.6 Rangkaian Relay
Pada rangkaian ini untuk mengaktifkan datau menonaktifkan relay digunakan
transistor tipe NPN. Dari gambar di atas dapat dilihat bahwa negated relay
dihubungkan ke kolektor dari transistor NPN, ini berarti jika transistor dalam keadaan
menyebabkan tegangan di kolektor menjadi 0 V, keadaan ini akan mengakibatkan
relay aktif. Sebaliknya jika transistor tdak aktif maka kolektor tidak terhubung ke
emitor, sehingga tegangan pada kolektor menjadi 12 Volt, keadaan ini menyebabkan
tidak aktif.
Kumparan relay akan menghasilkan tegangan singkat yang besar ketika relay
di non-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk
mencegah kerusakan pada transistor tersebut sebuah diode harus dihubungkan ke relay
tersebut. Diode dihubungkan secara terbalik sehingga secara normal diode ini tidak
menghantarkan.
Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan
mengalir melalui kumparan dan arus ini akan mengalir ke diode, tanpa adanya arus
diode sesaat yang besar itu akan mengalir ke transistor yang mengakibatkan kerusakan
pada transistor.
3.6 Display LCD karakter 2 x 16
Modul LCD merupakan modul keluaran yang digunakan sebagai tampilan
pada aplikasi pengukur suhu. Modul ini menggunakan LCD jenis M1632 yang
mempunyai ukuran 2x16, maksudnya bahwa tampilan LCD mampu
menampilkan 16 karakter dalam dua baris tampilan, sehingga tampilan yang
JP5 LCD
Gambar 3.7 Rangkaian Modul LCD
Pada gambar 3.7 diatas diperlihatkan rangkaian modul LCD yang akan
dihubungkan dengan mikrokontroler, dimana didalamnya terdapat 16 terminal yang
mempunyai fungsi masing-masing, yaitu :
1. DB4-DB7, merupakan penyemat untuk empat jalur data atas yang dapat
digunakan untuk membaca data dari modul ke mikrokontroler atau menulis
data dari mikrokontroler ke modul. DB7 juga digunakan sebagai penanda
sibuk.
2. DB0-DB3, merupakan penyemat untuk empat jalur data bawah yang dapat
digunakan untuk membaca data dari modul ke mikrokontroler atau menulis
data dari mikrokontroler ke modul. Apabila yang dibutuhkan hanya 4 bit
maka, jalur data ini tidak digunakan, sehingga hanya menggunakan jalur data
atas.
3. E (Enable), merupakan penyemat untuk sinyal operasi awal yang mampu
4. R/W (Read/Write), merupakan menyemat untuk sinyal pemilih baca atau tulis,
yang mana bila penyemat ini diberi logika 1, modul akan melakukan operasi
baca, sebaliknya bila diberi logika 0 akan melakukan operasi tulis. Pada
aplikasi ini karena LCD digunakan sebagai modul keluaran saja berarti hanya
melakukan operasi baca saja. Untuk mempermudah program maka pin 5
(R/W) langsung dihubungkan dengan ground.
5. RS (Register Selection), merupakan penyemat untuk sinyal pemilih fungsi
regiater yang apabila diberikan logika 0, register berfungsi sebagai register
instruksi untuk operasi tulis atau sebagai penanda sibuk, dan sebagai pencacah
alamat untuk operasi baca. Apabila diberi logika 1, register berfungsi sebagai
register data, baik untuk operasi tulis ataupun baca.
6. VEE (VLC), merupakan terminal catu daya untuk pengendalian tampilan LCD,
yaitu mengatur ketajaman tampilan karakter pada layar.
7. VCC, merupakan penyemat untuk terminal catu daya 5 volt.
8. VSS, merupakan Ground
3.7 Rangkaian Sensor Suhu IC LM 35
IC LM 35 ini tidak memerlukan pengkalibrasian atau penyetelan dari luar karena
ketelitiannya sampai lebih kurang seperempat derajat celcius pada temperature ruang.
Jangka sensor mulai dari – 55°C sampai dengan 150°C, IC LM35 penggunaannya
sangat mudah, difungsikan sebagai kontrol dari indicator tampilan catu daya terbelah.
IC LM 35 dapat dialiri arus 60 m A dari supplay sehingga panas yang ditimbulkan
sendiri sangat rendah kurang dari 0 ° C di dalam suhu ruangan.
Sensor suhu IC LM 35 merupakan IC sensor temperatur yang akurat yang
tegangan keluarannya linear dalam satuan celcius. Jadi LM35 memilik kelebihan
dibandingkan sensor temperatur linear dalam satuan kelvin, karena tidak memerlukan
pembagian dengan konstanta tegangan yang besar dan keluarannya untuk
mendapatkan nilai dalam satuan celcius yang tepat.
3.8 Flow Chart Rangkaian
Secara garis besar, diagram alir dari rangkaian aplikasi dari sensor PIR (Passive
Infra Red) untuk pengontrolan suhu ruangan ditunjukkan pada gambar 3.1 berikut di
start
Gambar 3.8 Flowchart Pengontrol suhu ruangan
Keterangan Flowchart:
Awal Start akan menginstalasi fotodioda dan menset pada logika low (0). Kemudian
Sensor PIR akan medeteksi ada apakah ada pengunjung yang masuk pada logika high
(1), apabila sensor PIR mendeteksi ada pengunjung yang masuk ke dalam ruangan
maka sensor LM 35 akan mendeteksi suhu runagan kemudian relay pada kipas akan
bergantung pada jumlah pengunjung yang masuk ke dalam ruangan dan apabila
pengunjung ke luar dari ruangan maka kipas akan menurunkan kecepatannya pada
level tertentu, dan jika tidak ada lagi pengunjung dalam ruangan maka kipas akan mati
secara otomatis. LCD akan mengupdate setiap ada pengunjung yang masuk dan keluar
BAB 4
HASIL DAN PEMBAHASAN
4.1 Pengujian Rangkaian Mikrokontroller AT89S52
Pengujian rangkaian Mikrokontroler dapat dilakukan dengan cara menghubungkan
rangkaian sistem minimum dengan sumber tegangan 5 V. Dimana pin 40
mikrokontroler dihubungkan dengan tegangan 5 V dan pin 20 dihubungkan dengan
ground. Setelah itu dilakuan pengukuran tegangan antara pin 40 dan pin 20, didapat
tegangan sebesar 4,98 V, artinya sumber tegangan telah sampai pada mikrokonroler.
12 MHz
Langkah selanjutnya adalah menghubungkan pin 17 (P3.7) dengan IC buffer
74LS24 dan keluarannya dihubungkan dengan sebuah LED yang dipasang aktif High
sebagai indikator. IC 74LS24 berfungsi sebagai Buffer (penyangga) dimana logika
yang diberikan mikrokontroler akan dikuatkan oleh IC tersebut. Dengan begitu
apabila Mikrokontroler memberikan logika 1 maka LED akan Aktif dan apabila diberi
logika 0 maka LED akan padam. Dengan adanya IC 74LS24 ini maka arus yang
digunakan untuk menghidupkan LED tidak diambil dari mikrokontroler melainkan,
mikrokontroler hanya memberikan logika saja.
Berikut ini dalah program yang diisikan kedalam mikrokontroler AT89S52:
Mov r1,#0
Program diatas dibuat untuk menghidupkan LED pada port 3.7 dan kemudian
mematikannya. Perintah Setb akan menjadikan p3.7 berlogika high yang
menyebabkan LED menyala. Perintah clr p3.7 membuat p3.1 kembali berlogika low
dan menyebabkan LED padam. Adapun perintah acall delay digunakan untuk
memanggil rutin delay yang berfungsi untuk menunda waktu selama beberapa saat
supaya pergantian menyala dan pedamnya LED dapat terlihat oleh mata. Untuk