RANCANGAN MANIPULATOR WEBCAM PADA APLIKASI
PEMANTAU JARAK JAUH BERBASIS WIFI MENGGUNAKAN
PROGRAM VNC
TUGAS AKHIR
KURNIATI MARUNDURI
102408003
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : RANCANGAN MANIPULATOR WABCAM PADA APLIKASI PEMANTAU JARAK JAUH BERBASIS WIFI MENGGUNAKAN PROGRAM VNC
Kategori : TUGAS AKHIR
Nama : KURNIATI MARUNDURI Nim : 102408003
Program Studi : DIPLOMA III (D3 FISIKA) Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, 16Juli 2013
Diketahuioleh :
Ketua Program Studi Pembimbing
D-III Fisika
Dr.Susilawati, M.Si Dr.MarhaposanSitumorang
PERNYATAAN
RANCANGAN MANIPULATOR WABCAM PADA APLIKASI
PEMANTAU JARAK JAUH BERBASIS WIFI MENGGUNAKAN
PROGRAM VNC
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2013
PENGHARGAAN
Puji dan Syukur Penulis panjatkan kepada Tuhan Yang Maha Pemurah dan
Maha Penyayang, karena dengan limpahan karunia-NYA penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
Penulis mengucapkan terima kasih kepada Bapak Drs. Marhaposan Situmorangselaku dosen pembimbing pada penyelesaian Laporan Tugas Akhir ini, yang telah memberikan panduan dan perhatian kepada penulis untuk menyempurnakan laporan tugas akhir ini. Ucapan terima kasih juga ditujukan kepada ketua program studi
D3 Fisika Instrumentasi yaitu Ibu Dr. Susilawati, M.Sidan Bapak Dr. Sutarman, M.Sc selaku Dekan FMIPA Universitas Sumatera Utara, dan kepada semua dosen pengajar dan staf pegawai di Departemen Fisika FMIPA USU.
Terima kasihpenulis ucapkan teristimewa kepada kedua orang tua penulis, abang, adik dan kakak tersayang (Rosniat Marunduri)yang telah banyak memberikan dukungan baik moril maupun materil kepada penulis dalam menyelesaikan laporan tugas akhir ini.Terimakasih juga kepadaKak Irma Girsang yang selalu
membantu dan memberi penulis motifasi dalam menyelesaikan laporan tugas akhir ini. Terimakasih juga penulis ucapkan kepada seluruh teman – teman seperjuangan stambuk 2010yang selalu saling mendukung satu sama lain selama berada dibangku kuliah.
Sekali lagi Penulis mengucapkan banyak terima kasih kepada semua pihak yang
ABSTRAK
DAFTAR ISI
1.4 Batasan Penulisan... 2
1.5 Sistematika Penulisan...3
BAB II LANDASAN TEORI
2.8Pemrograman Dalam Visual Basic 6.0... 21
BAB III PERANCANGAN DAN SISTEM KERJA RANGKAIAN 3.1 Perancangan Power Supplay (PSA) ... 26
3.2 Diagram Block ... 26
3.2.1 Mikrokontroler ... 27
3.2.3 Penguat...28
3.2.4 Motor Stepper...29
3.3 Diagram Alir(Flowchart) ...30
BAB IV PENGUJIAN ALAT DAN PROGRAM 4.1 Pengujian Rangkaian Power Supplay ((PSA) ...31
4.2 Pengujian Mikrokontroler AT89S51 ...32
4.3 Pengujian RS232 ... 44
4.4 Pengujian Rangkaian Stepper Motor ... 46
4.5 Ultra VNC...48
4.6 Pengujian Rangkaian Transistor...51
BAB V PENUTUP 5.1 Kesimpulan ... 53
5.2 Saran ... 53
DAFTAR GAMBAR
Halaman Gambar 2.1 Konfigurasi pin IC Mikrokontroler AT89S51 7
Gambar 2.2Konverter RS232 10
Gambar 2.3Konstruksi Motor Stepper Bipolar 14 Gambar 2.4Konstruksi Motor Stepper Unipolar 15 Gambar 2.5Layar Pemilihan Jenis Project
21Gambar
2.6Jendela Form 23
Gambar 2.7Jendela Kode 23
Gambar 2.8Cara Mengambil Label dari Toolbox 24
Gambar 2.9Layout pada Form 25
Gambar 2.10Hasil Program 25
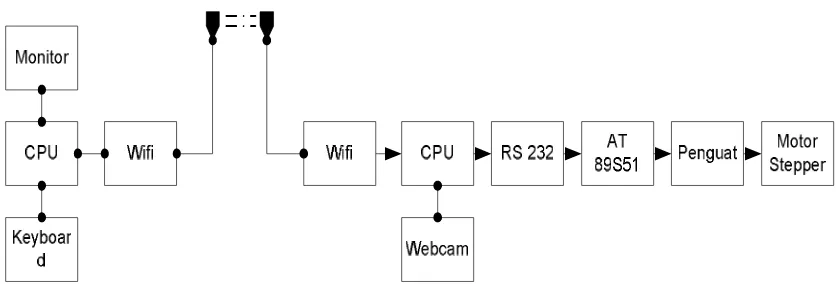
Gambar 3.1 Diagram Blok Rangkaian 26
Gambar 3.2 SkematikRS232 28
Gambar 3.3 Rangkaian Pengendali Motor Stepper
DAFTAR TABEL
Halaman
Tabel 2.1 Arah Perputaran Motor 17
Tabel 4.1Hasil Penggujian PIN Mikrokontroler AT89S51 32
ABSTRAK
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Penggunaan peralatan manual sedikit demi sedikit mulai tergantikan dengan peralatan otomatis. Selain sistem kerjanya yang sama, peralatan otomatis sangatlah
efisien karena satu orang dapat mengendalikan beberapa peralatan otomatis sekaligusdan hanya butuh waktu yang sedikit untuk memantau peralatan tersebut sudah bekerja dengan benar atau tidak.
Minat masyarakat dari waktu ke waktu semakin baik terhadap peralatan otomatis yang tengah berkembang pesat saat ini. Hal ini disebabkan karena penggunaannnya
yang mudah, efektif dan efisien. Berbeda dengan peralatan manual, hampir setiap satu peralatan harus dikendalikan oleh satu orang, ini sangatlah tidak efisien.
Salah satu peralatan otomatis yang mulai banyak menarik perhatian
masyarakatsaat ini adalahsistem manipulator wabcam pada aplikasi pemantau jarak jauh berbasis wifi menggunakan program VNC. Sistem manipulator wabcam ini sudah mulai
digunakan di rumah-rumah mewah, gedung perkantoran, museum, dan toko-toko besar. Sistem manipulator wabcam ini menggunakan 2 buah PC yang telah terhubung melalui jaringan wifi, salah satu PC berfungsi sebagai PC server dan yang lainnya
sebagai PC client. Selaain itu, alat ini juga menggunakan mikrokontroler sebagai otak untuk memerintahkanmotor stepper bergerak kearah kanan, kiri, atas dan bawah,
program VNC yang telah terhubung melalui jaringan wifi, komputer client dapat
mengambil alih komputer server dengan leluasa meskipun pengguna berada di tempatlain.
1.2. Rumusan Masalah
Berdasarkan uraian yang terdapat dalam latar belakang di atas, maka dalam tugas akhir
ini akan dibuat sebuah sistem manipulator wabcam yang dapat dikendalikan walaupun pengguna berada di tempat lain.Pada alat ini akan digunakan sebuah mikrokontroler
AT89S51, 2 buah motor stepper, 1 buah RS232, dan transistor.Bahasa asembly,program ultra VNC dan visual basic merupakan software yang diberikan pada PC dan mikrokontroler.
1.3 Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah
1. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga
(D-III) Fisika Instrumentasi FMIPA Universitas Sumatera Utara.
2. Untuk mengaplikasikan program bahasa asembly ke dalam rangkaian
mikrokontroler AT89S51
3. Untuk menerapkan aplikasi VNC pada rancangan manipulator webcam pada
pemantau jarak jauh berbasis wifi
1.4 Batasan Masalah
1. Studi cara kerja rangkaian yang meliputi diagram blok dan menguraikan
secara umum fungsi dari masing-masing komponen utama dalam diagram blok tersebut.
2. Motor steper merupakan suatu alat untuk menggerakan kamera tersebut
secara otomatis.
3. Mikrokontroler yang digunakan yaitu AT89S51, yang berfungsi sebagai
pengendali beban.
4. Interface yang digunakan RS232, berfungsi sebagai antar muka antara
komputer dan mikrokontroler.
5. Penguat, dalam hal ini menggunakan transistor yang berfungsi menguatkan
arus dari mikrokontroler agar dapat mengendalikan beban yang lebih besar.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari Sistem manipulator wabcam pada aplikasi pemantau jarak jauh berbasis wifi menggunakan program VNC, maka penulis
menulis laporan sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah,
serta sistematika penulisan.
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian. Teori pendukung itu antara lain tentang
mikrokontroler AT89S51 (hardware dan software), bahasa program yang digunakan,RS232 sebagai interface,pemrograman dalam Visual Basic 6.0, Program VNC sebagai pengendali komputer lain dari jarak jauh, wifi, motor stepper dan
transistor.
BAB III. ANALISA RANGKAIAN DAN KERJA SISTEM
Analisa rangkaian dan sistem kerja, dalam bab ini dibahas tentang sistem kerja per-blok diagram dan sistem kerja keseluruhan.
BAB IV PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas pengujian rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler AT89S51.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang dilakukan dari tugas akhir ini serta saran apakah rangkaian ini dapat dibuat lebih efisien
BAB 2
LANDASAN TEORI
Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu perangkat keras (hardware) yang dapat mengolah data, menghitung, mengingat dan mengambil pilihan. Mikrokontroler merupakan salah satu jawabannya. Vendor dari mikrokontroler
ini ada beberapa macam, diantaranya yang paling terkenal adalah Atmel, Motorola dan Siemens. Selain mengunakan mikrokontroler juga digunakan interface RS232 sebagai
antar muka antara komputer dan mikrokontrol, transistor sebagai penguat arus dan motor stepper sebagai beban yang dikendalikan oleh mikrokontroler. Selain perangkat keras, perangkat lunak (software)juga mempunyai peranan yang sangat penting karena
perangkat lunak merupakan seperangkat intruksi yang disusun menjadi sebuah program untuk memerintahkan microcomputer melakukan suatu pekerjaan. Dalam merancang
suatu program mikrokontroler dibutuhkan suatu software yang dapat menulis program dan mengubahnya menjadi bilangan heksadesimal.
2.1 Mikrokontroler
Dalam merancang aplikasi elektronika digital dibutuhkan sebuah alat/komponen yang dapat menghitung, mengingat, dan mengambil pilihan dan digunakan sebagai otaknya. Kemampuan ini dimiliki oleh sebuah komputer,
mikroprosesor, namun dirancang khusus untuk keperluan instrumentasi
sederhana. Mikrokontroler seri MCS-51 termasuk sederhana, murah dan mudah didapat dipasaran. Salah satu mikrokontroler seri MCS-51 adalah
mikrokontroler AT89S51.
2.2 Mikrokontroler AT89S51
Mikrokontroler AT89S51 adalah mikrokontroler keluaran ATMEL.Inc.
Mikrokontroler ini kompatibel dengan keluaran mikrokontroler 80C51. Mikrokontroller AT89S51 terdiri dari 40 pin dan sudah memiliki memory flash didalamnya, sehingga sangat praktis untuk digunakan. Beberapa kemampuan
(fitur) yang dimiliki adalah sebagai berikut :
Memiliki 4K Flash EPROM yang digunakan untuk menyimpan program.
Flash EPROM(Erasable Programmable Read Only Memory) dapat ditulis dan dihapus sebanyak 1000 kali (menurut manual).
Memiliki internal RAM 128 byte.
RAM (Random Access Memory), suatu memori yang datanya akan hilang
bila catu padam, diakses secara random, tidak sekuensial, artinya dialamat mana saja dapat dicapai secara langsung dengan cepat.
4 buah 8-bit I/O (Input/Output) port
Port ini berfungsi sebagai terminal input dan output. Selain itu, dapat
digunakan sebagai terminal komunikasi paralel, serta komunikasi serial (pin10 dan 11).
Tegangan operasi dinamis dari 2,7 volt hingga 6 volt.
Operasi clock dari 0 hingga 24 MHz
Program bisa diproteksi, sehingga tidak dapat dibaca oleh orang lain.
Menangani 6 sumber interupsi.
Ada kemampuan Idle mode dan Down mode
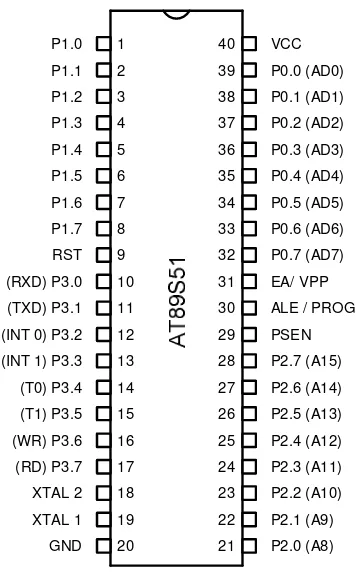
Berikut adalah gambar susunan pin pada Mikrokontroller AT89S51:
1
Gambar 2.1 Susunan Pin IC Mikrokontroller AT89S51
Keterangan fungsi-fungsi masing-masing pin adalah sebagai berikut : Pin 40 Vcc, suplay tegangan
Pin 32-39 P0.0-P0.7, Port input/output delapan bit dua arah yang juga dapat
berfungsi sebagai bus data dan bus alamat bila mikrokontroler menggunakan memori luar (eksternal).
Pin 1-8 P1.0-P1.7, Port input/output dua arah delapan bit dengan internal pull up.
Pin 10-17 P3.0-P3.7Port input/output delapan bit dua arah, selain itu Port 3
juga memiliki alternativef fungsi sebagai : RXD (pin 10) Port komunikasi input serial
TXD (pin 11) Port komuikasi output serial
INT0 (pin 12) Saluran Interupsi eksternal 0 (aktif rendah) INT1 (pin 13) Saluran Interupsi eksternal 1 (aktif rendah)
T0 (pin 14) Input Timer 0 prosesor akan membaca data dari memori I/O
luar.
Pin 9 RESET, Pin yang berfungsi untuk mereset mikrokontroller AT89S51 ke keadaan awal.
Pin 30 ALE (Address Latch Enable), berfungsi menahan sementara alamat byte rendah pada proses pengalamatan ke memori
Pin 29 PSEN (Program Store Enable), Sinyal pengontrol yang berfungsi
untuk membaca program dari memori eksternal.
Pin 31 EA, Pin untuk pilihan program, menggunakan program internal
atau eksternal. Bila ‘0’, maka digunakan program eksternal. Pin 19 X1, Masukan ke rangkaian osilator internal. Sumber osilator
eksternal atau quartz crystal kristal dapat digunakan.
Pin 18 X2, Masukan ke rangkaian osilator internal, koneksi quartz crystal atau tidak dikoneksikan apabila digunakan eksternal
osilator.
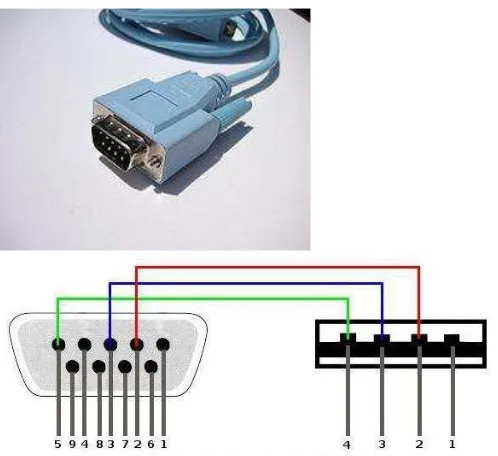
2.3 Interface
Interface merupakan rangkaian yang berfungsi sebagai antar muka antar 2 buah
piranti dengan dua level yang berbeda dalam hal ini adalah komunikasi antara mikrokontroler dengan komputer. Seperti diketahui level komuikasi serial pada komputer pada umumnya berlevel RS232 sedangkan pada mikrokontroler
berlevel TTL, agar kedua piranti dapat berkomunikasi dibutuhkan konverter RS232 dalam hal ini adalah sebuah IC dengan tipe MAX 232.
RS-232 adalah standar komunikasi serial yang didefinisikan sebagai antarmuka antara perangkat terminal data (data terminal equipment atau DTE) dan
perangkat komunikasi data (data communications equipment atau DCE) menggunakan pertukaran data biner secara serial. Di dalam definisi tersebut,
kenyataannya tidak semua produk antarmuka adalah DCE yang sesungguhnya.
Komunikasi RS-232 diperkenalkan pada 1962 dan pada tahun 1997, Electronic Industries Association mempublikasikan tiga modifikasi pada standar RS-232
dan menamainya menjadi EIA-232. Pada saat itu RS-232 lahir karena muncul dari ide-ide pada sebuah komite (Electronic Industries Association-EIA) yang mengembangkan sebuah interface untuk pertukaran data digital antara komputer
mainframe yang sebagai pusatnya dengan komputer lain, tetapi perangkat ini dihubungkan dengan jaringan telepon sehingga dibutuhkan modem untuk
menerjemahkan sinyal tersebut. Dan muncul RS-232 yang dianggap dapat diandalkan dalam melakukan komunikasi data (pertukaran data).
Standar RS-232 mendefinisikan kecepatan 256 kbps atau lebih rendah dengan jarak kurang dari 15 meter, namun belakangan ini sering ditemukan jalur
kecepatan tinggi pada komputer pribadi dan dengan kabel berkualitas tinggi, jarak maksimum juga ditingkatkan secara signifikan. Dengan susunan pin khusus yang disebut null modem cable, standar RS-232 dapat juga digunakan
untuk komunikasi data antara dua komputer secara langsung.
Sebuah port RS-232 pernah menjadi fitur standar dari komputer pribadi untuk koneksi ke modem, printer, mouse, penyimpanan data, un-interruptible daya listrik, dan perangkat periferal lainnya. Namun, kecepatan transmisinya terbatas,
ayunan tegangan yang relatif besar, dan konektor standar yang besar, sehingga termotivasi untuk pengembangan universal serial bus (USB) untuk
RS-232 dan harus menggunakan konverter eksternal untuk terhubung ke
peripheral yang lebih tua. Beberapa perangkat RS-232 masih ditemukan terutama di mesin-mesin industri atau instrumen ilmiah.
Gambar 2.2. Konverter RS232 2.4 Transistor
Salah satu fungsi transistor yang paling banyak digunakan di dunia Elektronika
Analog adalah sebagai penguat yaitu penguat arus,penguat tegangan, dan
penguat daya. Fungsi komponen semikonduktor ini dapat kita temukan pada rangkaian Pree-Amp Mic, Pree-Amp Head, Mixer, Echo, Tone Control,
Berdasarkan cara pemasangan ground dan pengambilan output, penguat
transistor dibagi menjadi tiga bagian yaitu:
1. Common Base
Penguat Common Base digunakan sebagai penguat tegangan. Pada rangkaian ini Emitor merupakan input dan Collector adalah output sedangkan Basis di-ground-kan/ ditanahkan.
Sifat-sifat Penguat Common Base:
o Isolasi input dan output tinggi sehingga Feedback lebih kecil
o Cocok sebagai Pre-Amp karena mempunyai impedansi input tinggi yang dapat menguatkan sinyal kecil
o Dapat dipakai sebagai penguat frekuensi tinggi o Dapat dipakai sebagai buffer
2. Penguat Common Emitor
Penguat Common Emitor digunakan sebagai penguat tegangan. Pada rangkaian ini Emitor di-ground-kan/ ditanahkan, Input adalah Basis, dan output adalah Collector.
Sifat-sifat Penguat Common Emitor:
o Signal output berbeda phasa 180 derajat
o Memungkinkan adanya osilasi akibat feedback, untuk mencegahnya sering dipasang feedback negatif.
o Stabilitas penguatan rendah karena tergantung stabilitas suhu dan bias transistor
3. Penguat Common Collector
Penguat Common Collector digunakan sebagai penguat arus. Rangkaian ini hampir sama dengan Common Emitor tetapi outputnya diambil dari Emitor.
Input dihubungkan ke Basis dan output dihubungkan ke Emitor. Rangkaian ini disebut juga dengan Emitor Follower (Pengikut Emitor) karena tegangan output
hampir sama dengan tegangan input.
Sifat-sifat Penguat Common Collector:
o Signal output dan signal input satu phasa (tidak terbalik seperti Common Emitor)
o Penguatan tegangan kurang dari 1 (satu)
o Penguatan arus tinggi (sama dengan HFE transistor)
o Impedansi input tinggi dan impedansi output rendah sehingga cocok digunakan sebagai buffer
Transistor adalah suatu monokristal semikonduktor dimana terjadi dua
berupa sinyal AC ataupun DC. Prinsip dasar transistor sebagai penguat adalah
arus kecil pada basis mengontrol arus yang lebih besar dari kolektor melewati transistor. Transistor berfungsi sebagai penguat ketika arus basis berubah.
Perubahan kecil arus basis mengontrol perubahan besar pada arus yang mengalir dari kolektor ke emitter. Pada saat ini transistor berfungsi sebagai penguat.
Dalam pemakaiannya transistor juga bisa berfungsi sebagai saklar dengan memanfaatkan daerah penjenuhan (saturasi) dan daerah penyumbatan (cut-off).
Pada daerah penjenuhan nilai resistansi penyambungan kolektor emitter secara ideal sama dengan nol atau kolektor terhubung langsung (short). Ini menyebabkan tegangan kolektor emitter Vce = 0 pada keadaan ideal. Dan pada
daerah cut off, nilai resistansi persambungan kolektor emitter secara ideal sama dengan tak terhingga atau terminal kolektor dan emitter terbuka yang
menyebabkan tegangan Vce sama dengan tegangan sumber Vcc
2.5 Motor Stepper
Pada dasarnya prinsip kerja motor stepper sama dengan motor DC, yaitu
membangkitkan medan magnet untuk memperoleh gaya tarik ataupun gaya tolak menolak dengan menggunakan catu tegangan DC pada lilitan/kumparannya. Motor stepper menggunakan gaya tarik untuk menarik fisik kutub magnet yang
berlawanan sedekat mungkin ke posisi kutub magnet yang dihasilkan oleh kumparan.
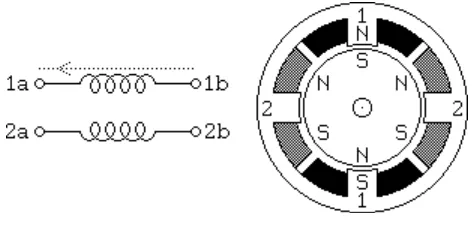
a. Motor Stepper Bipolar
Motor stepper bipolar memiliki empat kabel masukan. Namun untuk menggerakan motor stepper tipe ini lebih rumit jika dibandingkan
dengan menggerakan motor stepper tipe unipolar. Sebagai gambaran dapat dilihat konstruksi motor stepper bipolar pada gambar berikut :
Gambar 2.3. Konstruksi Motor Stepper Bipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal
yang mengayun dari positif ke negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang lebih kompleks daripada rangkaian pengendali untuk motor unipolar.
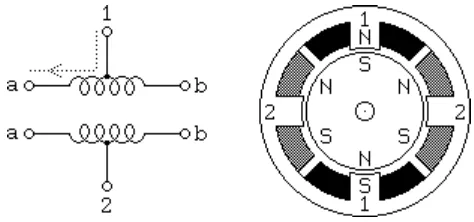
b. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap.
atau dapat juga yang menghubungkannya ke +Vcc, tergantung pada
driver yang digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper unipolar pada gambar berikut:
Gambar 2.4. Konstruksi Motor Stepper Unipolar
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang
karena hanya memerlukan satu switch pada setiap lilitannya. Agar motor ini berputar, tegangan positif diberikan pada terminal center tap, kemudian
tegangan positif diberikan secara bergantian dan berurutan terus- menerus pada keempat terminal masing-masing lilitan. Oleh karena itu, pada alat ini digunakan motor stepper jenis unipolar.
Pada motor stepper ini, suplai tegangan yang dibutuhkan adalah V = 12 volt dan sudut rotasi 1,80 per step. Maka dalam satu putaran penuh (3600) terjadi 3600/1,80= 200 step (Np). Kecepatan pulsa diekspresikan sebagai pps (= pulsa
per second) dan kecepatan putar umumnya ditulis sebagai ω (= rotasi / menit atau rpm). Kecepatan putar motor stepper (rpm) dapat dihitung menggunakan
rotasi menit
Np = step/putaran (pulsa/rotasi) pps = pulsa per detik
Torsi yang dapat dihasilkan oleh motor stepper dapat dihitung berdasarkan perbandingan daya kerja motor terhadap kecepatan putarannya. Atau dapat
dirumuskan sebagai berikut:
P ... (2.2)
dengan P adalah daya kerja motor dalam satuan watt dan ω adalah kecepatan perputaran motor dalam satuan rotation per minute (rpm).
Untuk mengetahui beban maksimum yang dapat digerakkan motor stepper dapat diperoleh dengan menghitung torsi dengan menggunakan rumus:
r
F.
... (2.3)
dengan F adalah gaya berat yang bekerja terhadap motor dan r adalah jari - jari
F = m.g (Newton) ... (2.4)
dengan, m = massa (kg) dan
g = percepatan gravitasi (m/s2).
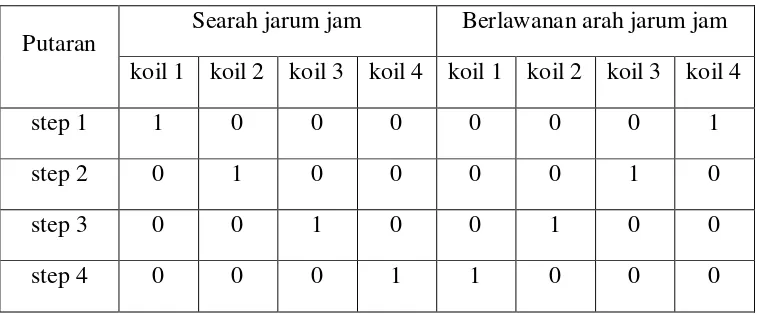
Motor stepper dapat diatur posisinya dengan akurat pada posisi tertentu dan dapat berputar kearah yang diinginkan dengan memberi pulsa-pulsa digital
dengan pola seperti pada Tabel 2.1 dibawah ini. Untuk memutar motor stepper adalah dengan memberi pulsa ke koil secara berurutan dari koil 1 ke koil 2, dan seterusnya. Arah putaran motor stepper tergantung urutan pulsa yang diberikan
ke koil, apabila diinginkan putaran dengan arah yang berlawanan, maka urutan pulsa yang dimasukkan ke koil pun digeser berlawanan pula.
Tabel 2.1. Arah Perputaran Motor
Putaran
Searah jarum jam Berlawanan arah jarum jam koil 1 koil 2 koil 3 koil 4 koil 1 koil 2 koil 3 koil 4
step 1 1 0 0 0 0 0 0 1
step 2 0 1 0 0 0 0 1 0
step 3 0 0 1 0 0 1 0 0
step 4 0 0 0 1 1 0 0 0
lilitan dalam kondisi off, yakni tidak mendapatkan arus. Pada tabel juga
ditunjukkan, untuk membalik putaran motor stepper cukup membalik urutan pemberian pulsa pada lilitan. Untuk memperlambat atau mempercepat putaran
motor stepper, dengan mengatur waktu urutan pemberian pulsa, akan tetapi, pemberian waktu pulsa jika terlalu lamban akan menyebabkan motor stepper bergetar dan jika terlalu cepat akan mengakibatkan motor tidak mau berputar.
2.6 Wi-Fi
Wi-Fi(Wifi) adalah sebuah teknologi terkenal yang memanfaatkan peralatan elektronik untuk bertukar data secara nirkabel (menggunakan gelombang radio)
melalui sebuah jaringan komputer, termasuk koneksi Internet berkecepatan
tinggi. Wi-Fi Alliance mendefinisikan Wi-Fi sebagai "produk jaringan wilayah
lokal nirkabel (WLAN) apapun yang didasarkan pada standar Institute of
Electrical and Electronics Engineers (IEEE) 802.11". Meski begitu, karena
kebanyakan WLAN zaman sekarang didasarkan pada standar tersebut, istilah
"Wi-Fi" dipakai dalam bahasa Inggris umum sebagai sinonim "WLAN".
Sebuah alat yang dapat memakai Wi-Fi (seperti komputer pribadi, konsol permainan video, telepon pintar, tablet, atau pemutar audio digital) dapat
terhubung dengan sumber jaringan seperti Internet melalui sebuah titik akses
jaringan nirkabel. Titik akses (atau hotspot) seperti itu mempunyai jangkauan
sekitar 20 meter (65 kaki) di dalam ruangan dan lebih luas lagi di luar ruangan.
memblokir gelombang radio atau beberapa mil persegi, ini bisa dilakukan
dengan memakai beberapa titik akses yang saling tumpang tindih.
"Wi-Fi" adalah merek dagang Wi-Fi Alliance dan nama merek untuk
produk-produk yang memakai keluarga standar IEEE 802.11. Hanya produk-produk Wi-Fi yang menyelesaikan uji coba sertifikasi interoperabilitas Wi-Fi Alliance yang
boleh memakai nama dan merek dagang "Wi-Fi CERTIFIED".
Wi-Fi mempunyai sejarah keamanan yang berubah-ubah. Sistem enkripsi pertamanya, WEP, terbukti mudah ditembus. Protokol berkualitas lebih tinggi
lagi, WPA dan WPA2, kemudian ditambahkan. Tetapi, sebuah fitur opsional yang ditambahkan tahun 2007 bernama Wi-Fi Protected Setup (WPS), memiliki celah yang memungkinkan penyerang mendapatkan kata sandi WPA atau WPA2
router dari jarak jauh dalam beberapa jam saja. Sejumlah perusahaan menyarankan untuk mematikan fitur WPS. Wi-Fi Alliance sejak itu
memperbarui rencana pengujian dan program sertifikasinya untuk menjamin semua peralatan yang baru disertifikasi kebal dari serangan AP PIN yang keras.
2.7 Bahasa Assembly ASM-51
Secara fisik, kerja dari sebuah mikrokontroler dapat dijelaskan sebagai siklus
pembacaan instruksi yang tersimpan di dalam memori. Mikrokntroler menentukan alamat dari memori program yang akan dibaca, dan melakukan proses baca data di memori. Data yang dibaca diinterprestasikan sebagai
melibatkan 2 register. Sarana yang ada dalam program assembly sangat minim,
tidak seperti dalam bahasa pemrograman tingkat atas (high level language programming) semuanya sudah siap pakai. Beberapa instruksi yang sering
digunakan pada bahasa assembly untuk ASM-51 antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak
langsung.
Contoh pengisian nilai secara langsung : MOV R0,#20h
Perintah di atas berarti isikan nilai 20 heksadesimal ke register 0 (R0). Tanda # sebelum bilangan menunjukkkan bahwa bilangan tersebut
adalah nilai.
Contoh pengisian nilai secara langsung : MOV R0,20h
Perintah di atas berarti isikan nilai yang terdapat pada alamat 20 heksadesimal ke register 0 (R0).Tanpa tanda # sebelum bilangan
menunjukkkan bahwa bilangan tersebut adalah alamat. 2. Instruksi RET
Instruksi RETURN (RET) merupakan perintah untuk kembali ke rutin
Instruksi pemanggilan subroutine bila alamat subroutine tidak lebih dari
2 Kbyte 4. CJNE
Operasi perbandingan operand pertama dengan operand kedua, jika tidak sama akan dilakukan percabangan.
5. DJNZ
Mengurangi nilai operand sumber dan percabangan akan dilakukan apabila isi operand tersebut tidak nol.
6. AJMP
Lompatan untuk percabangan maksimum 2 Kbyte. 7. CLR
Menghapus byte atau bit menjadi nol. 8. SETB
Menggeser bit atau byte menjadi satu. 9. POP
Transfer byte atau dari dalam stack ke operand tujuan.
2.8 Pemrograman Dalam Visual Basic 6.0
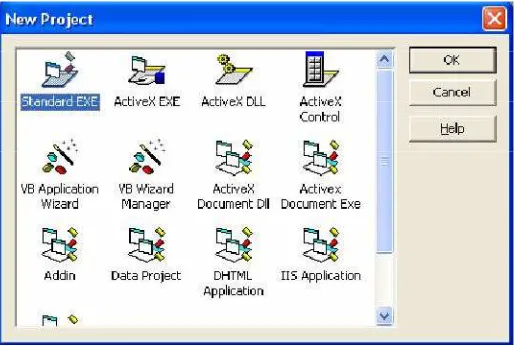
Untuk memulai pembuatan program aplikasi di dalam Visual Basic, yang dilakukan adalah membuat project baru. Project adalah sekumpulan form, modul, fungsi, data dan laporan yang digunakan dalam suatu aplikasi. Membuat
atas. Setelah itu akan muncul konfirmasi untuk jenis project dari program
aplikasi yan akan dibuat seperti terlihat pada gambar 2.5. berikut.
Gambar 2.5. Layar Pemilihan Jenis Project
Visual Basic 6.0 menyediakan 13 jenis project yang bisa dibuat seperti terlihat
pada gambar 1.3 di atas. Ada beberapa project yang biasa digunakan oleh banyak pengguna Visual Basic, antara lain:
1. Standard EXE: Project standar dalam Visual Basic dengan
komponen-komponen standar. Jenis project ini sangat sederhana, tetapi memiliki keunggulan bahwa semua komponennya dapat diakui oleh semua unit
komputer dan semua user meskipun bukan administrator. Pada buku ini akan digunakan project Standard EXE ini, sebagai konsep pemrograman visualnya.
2. ActiveX EXE: Project ini adalah project ActiveX berisi
komponen-komponen kemampuan intuk berinteraksi dengan semua aplikasi di sistem
operasi windows.
3. ActiveX DLL: Project ini menghasilkan sebuah aplikasi library yang
4. ActiveX Control: Project ini menghasilkan komponen-komponen baru
untuk aplikasi Visual Basic yang lain
5. VB Application Wizard: Project ini memandu pengguna untuk membuat
aplikasi secara mudah tanpa harus pusing-pusing dengan perintah-perintah pemrograman.
6. Addin: Project seperti Standard EXE tetapi dengan berbagai macam
komponen tambahan yang memungkinkan kebebasan kreasi dari pengguna. 7. Data project: Project ini melengkapi komponennya dengan
komponen-komponen database. Sehingga bisa dikatakan project ini memang disediakan untuk keperluan pembuatan aplikasi database.
8. DHTML Application: Project ini digunakan untuk membuat aplikasi
internet pada sisi client (client side) dengan fungsi-fungsi DHTML.
9. IIS Application: Project ini menghasilkan apliaksi internet pada sisi server
(server side) dengan komponen-komponen CGI (Common Gateway Interface).
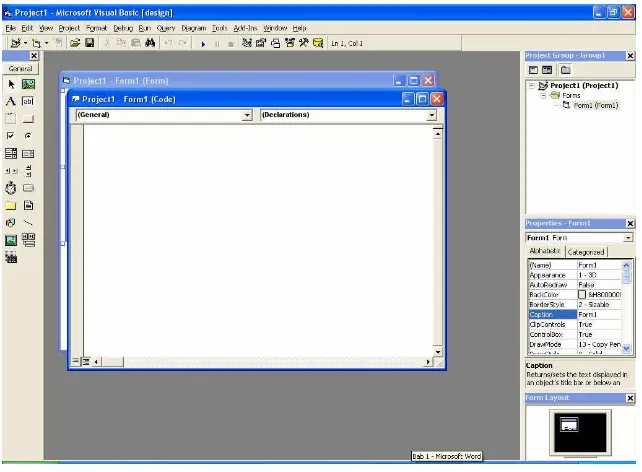
Selanjutnya pilih Standard EXE dan tekan [Ok]. Lalu muncul tampilan dari
Standard Exe seperti pada gambar 2.6. Dengan demikian project sudah siap dibuat. Dalam pembuatan project sebelumnya double click pada form yang
terbuat maka ada terlihat jendela tersembunyi (hidden windows) yang berupa jendela untuk pembuatan program atau jendela kode (code windows). Hal ini Dapat dilakukan dengan cara memilih ikon jendela form atau jendela kode yang
Gambar 2.6. Jendela Form
Gambar 2.7. Jendela Kode
Pada jendela form, pengguna dalam membangun tampilan dari program aplikasi yang akan dibuat dengan mengatur komponen-komponen baik letak, properti dan eventnya. Untuk mengambil suatu komponen dari [Toolbox] dapat
yang benar pada form. Sebagai contoh mengambil label dari Toolbox dapat
dilakukan dengan cara seperti gambar 2.8.di bawah ini.
Gambar 2.8. Cara Mengambil Label dari Toolbox
Langkah-langkah mengambil label dari toolbox untuk dipasangkan dalam form
adalah sebagai berikut:
1. Click ikon [Label] pada [ToolBox]
2. Pindahkan ke posisi dimana label itu akan diletakkan 3. Clik dan tarik sampai ukurannya benar lalu lepaskan
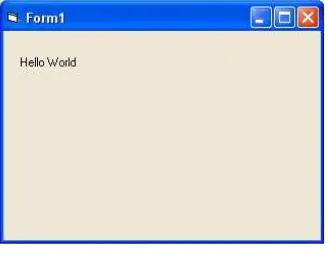
Langkah berikutnya adalah memberikan teks pada label, misalkan “Hello world”, maka pilihan properti Caption, dan isi dengan Hello world. Hasil
Gambar 2.9. Layout pada Form
Dan untuk menjalankan program click ikon Run () pada toolbar atau pilih menu [Run] >> [Start], atau dengan tekan tombol [F5]. Sehingga hasil program adalah:
BAB III
PERANCANGAN DAN SISTEM KERJA RANGKAIAN
3.1. Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke
seluruh rangkaian.
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.2. Diagram Block
Diagram block di atas adalah rangkaian elektronik yang berfungsi untuk mengendalikan peralatan sesuai perintah yang diberikan. Gambar 3.1 merupakan
gambar rancangan dasar pengendali kamera web berdasarkan wifi. Terdiri dari beberapa bagian utama rangkaian yaitu:
1. Pengendali mikro
2. Interface 3. Penguat
4. Motor stepper
3.2.1. Mikrokontroler
Mikrokontroler adalah rangkaian yang berfungsi sebagai pengendali beban. Mikrokontroler akan menggerakkan beban sesuai dengan perintah yang
diberikan. Beban yang dimaksud adalah beban motor stepper untuk mengarahkan kamera web ke posisi yang diinginkan oleh pengguna. Konfigurasi input – output mikrokontroler dapat dilihat pada gambar 2.1,
dimana sebagai input yaitu data serial dari komputer diberikan melalui port 3 yaitu V03 sedangkan output mikrokonteroler diprogram pada port 2 yaitu untuk
mengendalikan motor stepper 1 dan 2. Pin 18 dan 19 mikrokontroler dihubungkan pada kristal yang berfungsi sebagai pembangkit klock. Sedangkan kapasitor dan resistor pada pin 9 berfungsi sebagai reset pada saat
3.2.2. Interface
Interface merupakan rangkaian yang berfungsi sebagai antar muka antara dua buah piranti dengan dua level yang berbeda. Dalam hal ini adalah komunikasi
antara mikrokontroler dengan komputer. Seperti diketahui level komunikasi serial pada komputer pada umumnya berlevel RS 232, sedangkan pada mikrokontroler berlevel TTL. Agar kedua piranti dapat berkomunikasi
dibutuhkan konverter RS 232 dalam hal ini adalah sebuah IC dengan tipe MAX 232.
Gambar 3.2. Skematik RS232
3.2.3. Penguat
Yang dimaksud dengan rangkaian penguat adalah rangkaian penguat arus yang berfungsi menguatkan arus dari mikrokontroler agar dapat mengendalikan beban yang lebih besar. Sebuah penguat arus terdiri dari sebuah transistor NPM
transistor bekerja pada model on/off dengan memberikan masukan pada basis
transistor yaitu logika 0 atau 1 menyebabkan kondisi transistor berubah yaitu jika logika basis adalah 0 transistor akan cut off sedangkan logika 1 transistor
akan jenuh atau on. Tipe transistor yang digunakan yaitu transistor PN 39 yang memiliki faktor penguatan arus diatas 100.
3.2.4. Motor Stepper
Motor stepper merupakan motor yang bergerak langkah demi langkah. Rangkaian motor stepper berupa rangkaian penguat arus. Motor stepper yang digunakan adalah motor stepper unipolar 4 phasa. Dengan pengaturan pulsa
yang sesuai untuk tiap kumparan motor dapat menggerakkan motor ke arah yang diinginkan karena untuk menggerakkan kamera kedua arah,vertikal dan
10K
Gambar 3.3Rangkaian Pengendali Motor Stepper
Gambar 3.4. Diagram alir (flowchart )
Diagram di atas merupakan diagram aliran proses kerja sistem yang menggambarkan aliran proses satu siklus kerja dari start hingga selesai. Mulai dari start program akan dimulai setelah perangkat keras yaitu mikrokontroler di reset. Program akan mulai
dengan menginisialisasi port serial kemudian dilanjutkan dengan pembacaan masukan perintah dari PC atau komputer server yang diberikan melalui port serial. Jika terdapat
BAB IV
PENGUJIAN RANGKAIAN DAN PROGRAM ALAT
4.1. Pengujian Rangkaian Power Supplay (PSA)
Power supplay untuk PC membutuhkan daya besar, dengan tingkat panas yang minim dan tegangan yang lebih terjaga. Linear power supplay tidak cocok
untuk hal ini. Maka digunakan metode switching power supplay. Jauh lebih kompleks, tapi menawarkan tingkat efisiensi dan daya lebih besar. Kelebihan
utama pada kemampuan mengendalikan tegangan output agar tetap terjaga. Pulse Width Modulation (PWM) adalah sinyal utama yang memberikan perintah, untuk mengendalikan tegangan sekiranya terjadi perubahan beban pada
output. Ia dapat bekerja dalam selang waktu singkat, hanya dalam hitungan microsecond. Secara sederhana, apa yang terjadi pada power supplay adalah
sebagai berikut : input listrik AC 220V via rectifier (diubah ke DC), filter (membersihkan dari noise sumber listrik AC. Memungkinkan juga ditambah dengan rangkaian PFC (Power Factor Corection). Sejumlah kapasitor
berkapasitas besar juga digunakan untuk lebih meratakan tegangan. Rangkaian kapasitor ini juga dihubungkan dengan field-effect transistor (biasanya oleh
MOSFET).
Pengujian pada bagian rangkaian catu daya ini dapat dilakukan dengan mengukur tegangan keluaran dari rangkaian ini dengan menggunakan volt meter
stabil sampai suatu arus maksimum yang ditentukan oleh design. Pengujian
dilakukan dengan memberikan tegangan 5 volt.
4.2. Pengujian Mikrokontroler AT89S51
Untuk mengetahui apakah rangkaian mikrokontroller AT89S51 telah bekerja dengan baik, maka dilakukan pengujian. Pengujian bagian ini dilakukan dengan cara menghubungkansumber tegangan ke rangkaian dan mengamati
tegangan pada masing – masing PIN menggunakan multimeter digital. Berikut adalah hasil pengukuran yang ditampilkan oleh multimeter digital.
Tabel 4.1. Hasil Penggujian PIN Mikrokontroler AT89S51
PIN Tegangan (V)
1 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
10 4,97
12 0
13 0
14 0
15 0
16 0
17 0
18 2,21
19 2,15
20 0
21 0
22 0
23 0
24 0
25 0
26 0
27 0
28 0
29 4,91
30 1,66
31 4,97
32 0,6
33 0,62
35 0,63
36 0,64
37 0,64
38 0,64
39 0,65
40 4,97
Berikut ini adalah rancangan perangkat lunak atau program yang akan diunduh kedalam mikrokontroler. Program dibuat dengan bahasa asembly, kemudian di compile menjadi kode mesin dan diunduh ke chip mikrokontroler dengan
program pengunduh tertentu.
Mov P0,#0
Mov P1,#0
Mov P2,#0
Mov P3,#3
Acall serial_Initialization
Read_command :
Acall Serial_Read
Cjne A,#’R’,Jump1
Acall Set_R
Jump1: Cjne A,#’L’,Jump2
Acall Set_L
Ajmp Read_Command
Jump2: Cjne A,#’U’,Jump3
Acall Set_U
Ajmp Read_Command
Jump3: Cjne A,#’D’,Jump4
Acall Set_D
Ajmp Read_Command
Jump4: Ajmp Read_Command
Set_R: mov R0,#1
SetR: mov P2,#1
Acall Delay_Step
mov P2,#3
Acall Delay_Step
mov P2,#2
Acall Delay_Step
mov P2,#6
Acall Delay_Step
Mov P2,#0
Ret
Set_D: mov R0,#1
SetD: mov P2,#90H
Acall Delay_Step
mov P2,#80H
Acall Delay_Step
mov P2,#0C0H
Acall Delay_Step
mov P2,#40H
Acall Delay_Step
mov P2,#60H
Acall Delay_Step
mov P2,#20H
Acall Delay_Step
mov P2,#30H
Acall Delay_Step
mov P2,#10H
Acall Delay_Step
Djnz R0,SetD
Mov P2,#0
Ret
Mov SCON,#52H
Mov TMOD,#20H
Mov TH1,#0FdH
Mov TCON,#040H
Mov PCON,#80H
Ret
Serial_Read:
Clr RI
Jnb RI,$
Mov A,SBUF
Delay_1s:
Mov R4,#200
Tunggu_1detik:
Acall Delay_5ms
Djnz R4,Tunggu_1detik
Ret
Delay_Step:
Mov R4,#5
Delay: Acall Delay_5ms
Djnz R4,Delay
Delay_5ms:
Push TMOD
Mov TMOD,#21H
Mov TH0,#0EDH
Mov TLO,#0FFH
Setb TR0
Tunggu_5ms:
Jbc TF0,Sudah_5ms
Ajmp Tungggu_5ms
Sudah_5ms:
Clr TR0
Pop TMOD
Ret
END
Adapun penjelasan perintah – perintah tersebut adalah sebagai berikut :
1. Mov P0,#0
Mov P1,#0
Mov P2,#0
Mov P3,#3
2. Acallserial_Initialization
Perintah di atas merupakan perintah pemanggilanuntuk inisialisasi port serial
yang berfungsi untuk menginisialisasi port serial sesuai dengan karakteristik yang diinginkan.
3. Acall Serial_Read
perintah di atas merupakan perintah untuk memanggil rutin baca port serial yaitu data yang diberikan oleh komputer server.
4. Cjne A,#’R’,Jump1
Acall Set_R
Ajmp Read_Command
Perintah di atas adalah data untuk membandingkan data yang terbaca oleh port serial dengan data tertentu dalam hal ini karakter R. Jika isi akumulator = R
program akan dilanjutkan dengan menjalankan kamera ke kanan yaitu untuk menggerakkan motor stepper 1 ke kanan. Sedangkan jika tidak sama program akan lompat ke alamat berikutnya.
mov P2,#4
Perintah di atas adalah perintah untuk memanggil motor stepper ke kanan yaitu ndengan memberikan urutan step secara teratur agar motor bergerak ke kanan.
7. Serial_Read:
Perintah di atas adalah perintah untuk melakukan tundaan waktu selama 1 detik dengan melakukan loop 200 x 5ms
9. Delay_Step:
Mov R4,#5
Delay: Acall Delay_5ms
Djnz R4,Delay
Ret
Perintah di atas adalah perintah untuk menunda waktu selama 25ms dengan
melakukan loop 5 x 5ms
10. Delay_5ms:
Push TMOD
Mov TH0,#0EDH
Mov TLO,#0FFH
Setb TR0
Tunggu_5ms:
Jbc TF0,Sudah_5ms
Ajmp Tungggu_5ms
Sudah_5ms:
Clr TR0
Pop TMOD
Ret
END
Perintah di atas adalah perintah untuk melakukan tundaan waktu selama 5ms
dengan menjalankan timer 0 dan pengisian register untuk penundaan waktu selama 5 detik.
4.3. Pengujian RS232
Pengujian konverter RS232 adalah untuk mengetahui apakah konverter
telah bekerja dengan baik atau tidak yaitu dengan mengukur tegangan – tegangan pada kontroler dan mengamati bentuk gelombang input – output dari
Berikut adalah data hasil pengukuran dan gambar foto yang diambil dari
tampilan osiloskop. Dari pengukuran yang dilakukan memberikan suatu kesimpulan rangkaian telah bekerja sesuai dengan fungsinya. Karena data yang
dikirim berupa kode – kode digital serial dengan format ASCII telah sesuai.
Tabel 4.2. Hasil Penggujian PIN HIN 232 PIN Tegangan (V)
1 6,87
2 8,9
3 2,42
4 4,56
5 4,24
6 8,35
7 8,35
8 0
9 4,97
10 4,11
11 4,9
12 4,97
13 0
14 8,36
15 0
R : 52H = 0101 0010
D : 44H = 0100 0100
U : 55H = 0101 0101
Gambar 4.1. Bentuk Gelombang I/O dari Konverter pada tampilan Osiloskop
4.4. Pengujian Rangkaian Stepper Motor
Program yang diberikan pada driver motor stepper untuk memutar motor stepper ke kiri,kanan,atas dan bawah adalah sebagai berikut :
Private Sub Command1_Click()
MSComm1.Output = "U"
End Sub
Private Sub Command2_Click()
MSComm1.Output = "D"
End Sub
MSComm1.Output = "L"
End Sub
Private Sub Command4_Click()
MSComm1.Output = "R"
End Sub
Private Sub Command5_Click()
End
End Sub
Private Sub Command6_Click()
End
End Sub
Private Sub Form_Load()
MSComm1.PortOpen = True
End Sub
4.5. Ultra VNC
VNC merupakan sebuah aplikasi yang bebas dari sistem operasi (multi
sebuah VNC Server yang menggunakan sistem operasi berbeda. Jadi kita tidak
perlu repot memikirkan jika ingin meremote ke sistem operasi yang berbeda.
Untuk menyiapkan koneksi VNC kita memerlukan sebuah IP yang akan menjadi
target remote dan sebuah password, jika koneksi ke LAN dinamakan IP static, dan jika koneksi ke Internet dinamakan IP publik, bila kita menggunakan VNC
sekedar untuk remote jaringan LAN dapat menggunakan IP static biasanya yang sering di gunakan 192.168.1.1 akan tetapi jika kita menggunakan Internet untuk koneksi antar gedung atau international dapat menggunakan IP publik, cara
mengetahui IP publik yaitu dengan masuk ke website www.myipaddress.comjika
sudah terbuka pasti terlihat IP public user yang akan di remote.
Jika kita mengendalikan sebuah PC (remote) melalui jaringan yang lebih luas
dan menggunakan IP publik kita harus menggunakan modem tersendiri yang di koneksikan ke komputer yang di gunakan untuk meremote agar terhubung ke
internet, karena jika menggunakan router, kita tidak akan berhasil meremote menggunakan IP publik. Software Real VNC ini menggunakan sistem yang bernama VNC (Virtual Network Computing) adalah sistem yang memungkinkan
seseorang untuk berbagi desktop (desktop sharing) yang menggunakan protocol RFB (Remote Frame Buffer) untuk mengendalikan komputer lain secara remote.
Penekanan tombol dan gerakan mouse ditransmisikan dari komputer satu ke komputer lain melalui sebuah jaringan. VNC sendiri resmi di kembangkan oleh AT & T. Kode sumber VNC, asli bersifatterbuka dibawah lisensi GNU, dan
UltraVNC memungkinkan anda untuk menggunakan keyboard dan mouse untuk
mengendalikan komputer lain dari jarak jauh melalui jaringan lokal maupun internet. Hal ini berarti anda dapat bekerja pada komputer target yang diremote,
seolah-olah seperti anda duduk di depan komputer yang dikendalikan langsung dari tempat anda..UltraVNC dapat menjadi solusi yang membuat Anda menjadi lebih mudah untuk memperbaiki masalah pada komputer klien tanpa harus
berada di komputer klien tersebut.Aplikasi ini sangat cocok untuk admin yang harus memantau penggunaan komputer dalam jumlah yang besar secara jauh,
Gambar 2.5. Tampilan Ultra VNC
UltraVNC bisa mengendalikan dan mengambil alih desktop komputer lain yang terhubung dalam satu jaringan maupun internet. Syaratnya, komputer
kita telah dipasangi UltraVNC Server, sementara komputer yang akan mengakses dipasangi UltraVNC Viewer.
Aplikasi server dan klien menyediakan pilihan konfigurasi yang lengkap dan mendetail.Banyak pengaturan yang bisa dilakukan, misalnya apakah server hanya bisa memantau ataukah bisa juga digunakan untuk mengendalikan
komputer klien secara penuh.Aplikasi ini juga sangat mudah di dapatkan, karena aplikasi ini dapat di download dari google dan langsung dapat diinstalkan pada
Namun, bagi pengguna awam, banyaknya pilihan ini bisa menimbulkan
sedikit kebingungan.Karena itu, pengguna harus menyimak secara seksama fungsi-fungsi yang ada. Untungnya, disediakan konfigurasi secara otomatis yang
akan mendeteksi komputer yang telah terhubung.
Feature lain yang ditawarkan UltraVNC cukup beragam, seperti transfer
file, video driver, viewer toolbar, Java viewer, hingga text chat. Tersedia pula
beberapa add- on yang membantu memudahkan pengguna untuk menangani kondisi koneksi yang paling kompleks sekalipun. UltraVNC juga mendukung
hingga beberapa tampilan dalam satu layar sehingga pengguna bisa memberikan solusi secara bersamaan.Pengguna dapat mengatur jumlah maksimal layar yang hendak ditampilkan sesuai pilihan. Akan tetapi perlu diingat bahwa, makin
banyak tampilan, berarti makin berat beban komputer.Jadi, sesuaikan dengan
kemampuan komputer server untuk menampilkan beberapa layar sekaligus.
4.6. Pengujian Rangkaian Transistor
Untuk mengetahui apakah rangkaian transistor telah bekerja dengan baik, maka dilakukan pengujian. Pengujian ini dilakukan berdasarkan data yang telah
diperoleh sebagai berikut :
Tabel 4.3. Data PadaPenggujian Transistor Logik `VB VCC Keadaan Transistor
1 0,07 0,1 On
Pada saat logika 1.
, ,
,
Pada saat logika 0 Ib = 0 ; IC = 0
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari evaluasi hasil kerja alat, dapat diambil beberapa kesimpulan dalam penelitian ini. Kesimpulan yang diambil oleh penulis adalah:
1. Alat ini sudah bekerja sesuai dengan tujuannya sebagai alat pemantau jarak jauh
melalui jaringan internet. Dengan demikian suatu lokasi dapat dipantau dari mana saja asalkan terdapat jaringan internet.
2. Dari pengujian alat ini, mikrokontroler AT89S51 dapat dikendalikan untuk
memerintahkan stepper motor dengan menggunakan bahasa asembly.
3. Dari pengujian alat ini, program VNC dapat diaplikasikan untuk memonitoring
PC server melalui jaringan wiifi.
5.2 Saran
1. Alat ini sebaiknya diberikan daya cadangan agar dapat tetap berfungsi meskipun
daya dari PLN padam.
2. Sebaiknya alat ini menggunakan oto fokus kamera yang lebih besar agar gambar
yang dihasilkan semakin bagus.
3. Hendaknya rancangan alat ini dikembangkan sehingga dapat memantau
DAFTAR PUSTAKA
Edison, Jhon, Seri Penuntun Praktis Membangun Wireless LAN,Penebit : PT Elex Media Komputindo,Jakarta, 2005.
Enterprise, Jubilee, 100 Tip & Trik Wifi, Penebit : PT Elex Media Komputindo,Jakarta.
2009.
MataMaya, Studio, Teknik Remote PC,Penebit : PT Elex Media Komputindo,Jakarta,
2010
Pramono, Djoko, Mudah Menguasai Visual Basic 6, Penebit : PT Elex Media Komputindo,Jakarta, 1999.
Priyambodo, Tri Kuntoro, Jaringan Wifi, Teori dan Implementasi,, Penerbit : Andi, Yogyakarta, 2005.