DESAIN KONTROLER PID FREKUENSI
SECARA ANALITIS
Kontroler PID dianggap memiliki fungsi alih berbentuk
s K s K K s
G I D
P
c( )= + + (1)
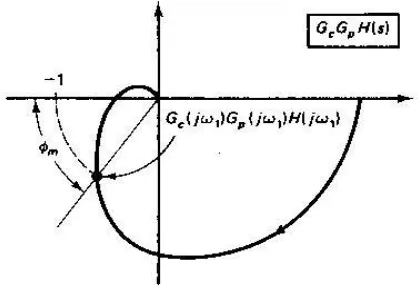
Seperti diperlihatkan dalam gambar 1, diagram Nyquist terkompensasi bergerak
melewati titik 1∠-1800 + φPM untuk frekuensi ω1, untuk mencapai batas fasa φPM.
Atau
PM p
c j G j H j
G ( ω1) ( ω1) ( ω1)=1∠−1800 +φ
Gambar 1 Diagram Nyquist sistem terkompensasi
Jika sudut Gc(jω1) adalah θ, maka
(2)
) ( ) ( 180
)
( 1 1
0
1 φ ω ω
ω
θ =∠Gc j = + PM −∠Gp j H j
Dari persamaan (1) dan (2), diperoleh
) sin (cos
) ( )
( 1
1
1 ω ω θ θ
ω K G j j
K j
K I c
D
P + − = + (3)
dengan
Dari persamaan (3) diperoleh
) ( ) (
cos
1
sin
1
Prosedur desain analitik memerlukan pemilihan frekuensi ω1 pada batas fasa tertentu.
Contoh 1 :
Sistem dengan fungsi alih lup terbuka :
)
Tanggapan frekuensi dari fungsi alih diberikan seperti terlihat dalam tabel 1.
Sebagaimana contoh pada bab terdahulu, batas fasa ditetapkan sebesar 500.
Diinginkan untuk merancang kontroler PD. ω1 dipilih sebesar 1,7 rad/s seperti
contoh desain kompensator mendahului-fasa kawasan waktu bab lalu. Dari tabel 1
terlihat bahwa Gp(j1,7)H(j1,7) = 0,4545∠-189,89900. Sehingga
0 4545 , 0
9 , 59 cos
) ( ) (
cos
12 , 1 ) 4545 , 0 )( 7 , 1 (
9 , 59 sin
) ( ) (
sin
1 1
1
= =
=
ω ω
ω
θ
j H j G K
p D
Fungsi alih kontroler PD hasil desain analitik adalah
s s
Gc( )=1,1+1,12
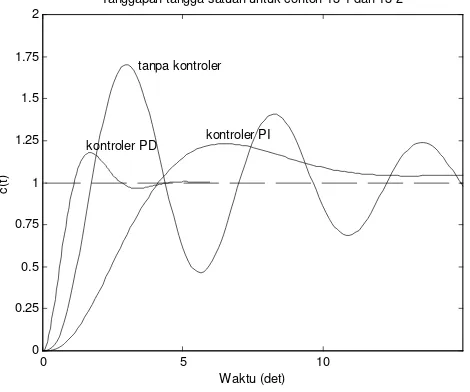
Tanggapan tangga satuan sistem terkompensasi kontroler PD diperlihatkan gambar 2.
0 5 10
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2
Tanggapan tangga satuan untuk contoh 13-1 dan 13-2
Waktu (det)
c(
t)
tanpa kontroler
kontroler PI kontroler PD
Gambar 2 Tanggapan tangga satuan contoh 1 dan 2