SISTEM PENGGERAK PANEL SURYA
DUAL AXIS BERBASIS MICROCONTROLLER
UNTUK OPTIMASI KONVERSI ENERGI MATAHARI
RISAL FAUZI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Sistem Penggerak Panel Surya Dual Axis Berbasis Microcontroller Untuk Optimasi Konversi Energi Matahari adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
RISAL FAUZI. Sistem Penggerak Panel Surya Dual Axis Berbasis Microcontroller Untuk Optimasi Konversi Energi Matahari. Dibimbing oleh ARDIAN ARIEF SETIAWAN dan HERIYANTO SYAFUTRA.
Tujuan dari penelitian ini adalah untuk mendesain dan membangun penggerak panel surya dual axis yang dapat mengkonversi sinar matahari menjadi energi listrik secara optimal. Dual axis tracking sytem pada penelitian ini menggunakan empat LDR, microcontroller Arduino Uno, dan motor servo. Empat LDR berfungsi sebagai sensor arah gerak. Motor servo digunakan untuk menggerakkan panel surya dengan dua derajat kebebasan. Microcontroller Arduino Uno berfungsi sebagai penyimpan logika perintah pada sistem penggerak. Prototipe panel surya yang dibuat mampu mengikuti pergerakan arah datangnya sinar matahari secara dinamis. Hasil uji coba panel surya dinamis ini menunjukkan konversi energi sinar matahari menjadi listrik lebih besar dibandingkan dengan panel surya yang statis. Hal ini terjadi karena energi terbesar yang diterima oleh panel surya adalah ketika arah radiasi matahari tegak lurus dengan bidang panel surya. Besar surplus energy matahari pada panel surya adalah 42.6%
Kata kunci : dual axis, LDR, microcontroller Arduino Uno, motor servo, panel surya
ABSTRACT
RISAL FAUZI. Dual Axis Solar Tracker System based on Microcontroller for Optimization Conversion Solar Energy. Supervised by ARDIAN ARIEF SETIAWAN and HERIYANTO SYAFUTRA.
The purpose of this research is to design and construct dual axis solar panel tracker that can convert sunlight into electrical energy. Dual axis tracking sytem in this research used four LDR, Arduino Uno microcontroller, and servo motor. Four LDR functions as a direction of motion sensors . Servo motor is used to drive the solar panels with two degrees of freedom (Azimuth and Altitude). Arduino Uno microcontroller functions as a storage logic commands on the system drive. Prototype solar panels were designed to be able to follow the movement direction of the sun. The results showed that a dynamic solar panels converting sunlight into electrical energy more efficiently compared to static solar panels. This is because the largest energy received by the solar panel obtained when the sun radiation is perpendicular to solar panels. The surplus energy to the solar panel is 42.6%
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains pada
Departemen Fisika
SISTEM PENGGERAK PANEL SURYA
DUAL AXIS BERBASIS MICROCONTROLLER
UNTUK OPTIMASI KONVERSI ENERGI MATAHARI
RISAL FAUZI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR
Judul Skripsi : Sistem Penggerak Panel Surya Dual Axis Berbasis Microcontroller Untuk Optimasi Konversi Energi Matahari Nama : Risal Fauzi
NIM : G74100017
Disetujui oleh
Ardian Arief Setiawan, M.Si. Pembimbing I
Heriyanto Syafutra, M.Si. Pembimbing II
Mengetahui,
Dr. Akhiruddin maddu Ketua Departemen Fisika
PRAKATA
Puji syukur kepada Allah SWT yang telah memberikan rahmat dan hidayahnya, sehingga penulis dapat menyelesaikan karya ilmiah yang berjudul Sistem Penggerak Panel Surya Dual Axis Berbasis Microcontroller Untuk Optimasi Konversi Energi Matahari.
Terima kasih penulis ucapkan kepada Ardian Arief Setiawan, M.Si. dan Heriyanto Syafutra, M.Si. sebagai dosen pembimbing yang telah memberikan motivasi dan waktunya serta dari arahan beliau karya ilmiah ini dapat diselesaikan. Terima kasih juga kepada orang tua, saudara, semua staf Fisika IPB, Ulul Albab, Febri Dwi Irawati, dan teman-teman atas segala bantuan dan kasih sayangnya.
Bogor, Maret 2014
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 1
Perumusan Masalah 2
Hipotesis 2
Manfaat Penelitian 2
Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 2
Sensor LDR 2
Dual Axis Tracking System 3
Microcontroller Arduino 3
Motor Servo 4
METODE 4
Waktu dan Tempat Penelitian 4
Alat dan Bahan 4
Studi Pustaka 5
Perancangan Dual Axis Tracking System 5
Perancangan sensor 5
Pembuatan Rangkaian Sensor 6
HASIL DAN PEMBAHASAN 6
SIMPULAN DAN SARAN 12
Simpulan 12
Saran 12
DAFTAR TABEL
1 Tegangan keluaran LDR yang terbaca oleh Arduino Uno 7
DAFTAR GAMBAR
1 LDR 3
2 Microcontroller Arduino Uno 3
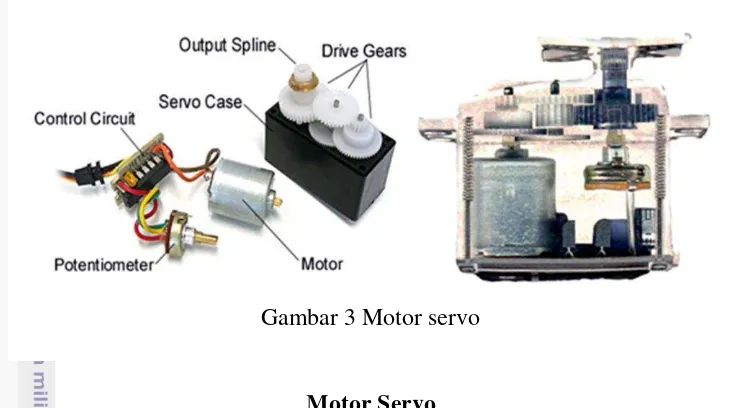
3 Motor servo 4
4 Perancangan dual axis tracking system 5
5 Perancangan sensor 5
6 Rangkaian pembagi tegangan 6
7 Algoritma dual axis tracking system 6
8 Sensor LDR dual axis tracking system 7
9 Karakteristik tegangan keluaran terhadap waktu di hari pertama 8 10 Karakteristik tegangan keluaran terhadap waktu di hari kedua 8 11 Karakteristik tegangan keluaran terhadap waktu di hari ketiga 8 12 Karakteristik arus keluaran terhadap waktu di hari pertama 9 13 Karakteristik arus keluaran terhadap waktu di hari kedua 10 14 Karakteristik arus keluaran terhadap waktu di hari ketiga 10 15 Karakteristik daya keluaran terhadap waktu di hari pertama 11 16 Karakteristik daya keluaran terhadap waktu di hari kedua 11 17 Karakteristik daya keluaran terhadap waktu di hari ketiga 11
DAFTAR LAMPIRAN
1 Simulasi ISIS PROTEUS 7 pengerak dual axis tracking sytem 14 2 Bentuk pengerak dual axis tracking sytem nampak atas, depan, dan
samping serta cara pengambilan data 15
3 Nilai tegangan dan arus untuk panel surya yang menggunakan sistem
penggerak panel surya dual axis 16
4 Nilai tegangan dan arus untuk panel surya tanpa penggerak (statis) 17 5 Daya keluaran untuk panel surya menggunakan penggerak dan tanpa
penggerak 18
6 Algoritma ploting data pada MATLAB 19
1
PENDAHULUAN
Latar Belakang
Energi merupakan salah satu permasalahan yang penting di Indonesia, karena Indonesia masih banyak bergantung pada sumber energi yang berasal dari bahan bakar fosil (minyak) yang sifatnya tidak dapat diperbaharui. Jika pasokan minyak dunia habis, maka akan terjadi krisis energi yang berpengaruh buruk pada ekonomi negara, yaitu sektor industri, transportasi, dan rumah tangga. Telah banyak upaya yang dilakukan pemerintah dan peneliti untuk mengatasi permasalahan tersebut, dengan mencari sumber energi alternatif yang tidak terbatas dan dapat diperbaharui.
Salah satu sumber energi alternatif yang terdapat di alam adalah matahari.5 Energi matahari sangatlah berlimpah di wilayah Indonesia yang terletak di katulistiwa. Energi ini diperoleh secara gratis oleh semua kalangan masyarakat. Pemanfaatan energi matahari dalam bentuk energi listrik akan mengurangi konsumsi energi masyarakat terhadap energi listrik yang berbahan bakar fosil sehingga dapat menghemat anggaran belanja negara atau pemerintah daerah.
Sel photovoltaic adalah sebuah alat semikonduktor yang terdiri dari sebagian besar dioda p-n junction dan dengan adanya cahaya matahari mampu menciptakan energi listrik.7 Sel photovoltaic hanya bekerja secara optimum bila posisinya tepat tegak lurus dengan matahari.
Matahari merupakan sumber energi yang bergerak dan setiap derajat gerakan matahari akan mempengaruhi besar penerimaan intensitas cahaya yang akan diterima oleh panel surya.9 Untuk memanfaatkan cahaya matahari sebagai energi secara optimal maka panel surya harus terus diarahkan tegak lurus terhadap cahaya matahari..
Berkaitan dengan hal itu, pada penelitian ini akan merancang alat yang dapat digunakan untuk menempatkan panel surya tetap dalam kondisi intensitas matahari yang optimum. Penelitian ini menggunakan empat sensor cahaya (LDR) yang berfungsi sebagai pembanding tegangan keluaran, sedangkan microcontroller ARDUINO menjadi penyimpan logika perintah dalam sistem, dan motor servo menjadi penggerak untuk mengubah posisi panel surya yaitu dari timur ke barat serta utara selatan.
Tujuan Penelitian
2
Perumusan Masalah
Adapun perumusan masalah yang penulis ajukan adalah sebagai berikut : 1. Bagaimana rancangan sistem penggerak panel surya berbasis
microcontroller ?
2. Apakah sistem penggerak panel surya lebih efisien mengkonversi energi matahari menggunakan metode dual axis dibandingkan statis ?
Hipotesis
Tegangan keluaran, arus, dan daya yang dihasilkan menggunakan sistem penggerak panel surya akan lebih besar dibandingkan dengan sistem panel surya statis. Sehingga sistem penggerak panel surya akan lebih efisien mengkonversi energi matahari.
Manfaat Penelitian
Membuat sebuah sistem kendali penjejak sinar matahari baik perangkat lunak maupun perangkat keras dengan kemampuan untuk memaksimalkan penerimaan cahaya matahari. Menerapkan konsep mengenai cara untuk memaksimalkan tingkat penerimaan sinar matahari dengan mengatur posisi penampang menghadap arah datangnya sinar matahari.
Ruang Lingkup Penelitian
Penelitian ini dibatasi pada prototype penggerak panel surya, gerakannya pun dibatasi selatan – uatara (Altitude) dan timur – barat (Azimuth), sensor penggerak memanfaatkan bayangan sehingga panel surya akan bergerak saat ada sinar matahari.
TINJAUAN PUSTAKA
Sensor LDR
Sensor adalah piranti yang menerima dan merespon sinyal atau measurand. Banyak metode yang berbeda telah diusulkan dan digunakan untuk melacak posisi matahari. Yang paling sederhana dari semuanya menggunakan LDR sebuah Light Dependent Resistor untuk mendeteksi perubahan intensitas cahaya pada permukaan resistor.2,6 Resistansi LDR pada tempat yang gelap biasanya mencapai
3 Dual Axis Tracking System
Dual axis tracking system menggunakan panel surya untuk melacak matahari dari timur ke barat dan utara ke selatan menggunakan dua derajat kebebasan untuk memutar.1,8,10 Sistem pelacakan sumbu ganda menggunakan empat LDR, dua motor dan microcontroller. Keempat LDR yang ditempatkan di empat arah yang berbeda. Satu set sensor dan satu motor digunakan untuk menggerakkan panel dari timur ke barat dan set lain dari sensor dan motor menggerakkan utara keselatan3.
Microcontroller Arduino
Arduino merupakan open-source, yang berarti perangkat keras yang harganya murah dan perangkat lunak yang bebas dikembangkan. Papan Duemilanove memiliki mikrokontroler Atmel ATmega 328 beroperasi pada 5 V dengan 2 Kb RAM, flash memory 32 Kb untuk menyimpan program dan 1 Kb EEPROM untuk menyimpan parameter. Kecepatan clock 16 MHz, yang diterjemahkan untuk mengeksekusi sekitar 300.000 baris dari sumber kode C per detik. Duemilanove memiliki 14 I/O pin digital dan 6 pin input analog. Ada konektor USB untuk menghubungkan ke komputer dan DC power jack untuk menghubungkan 6-20 V sumber daya eksternal, saat menjalankan program saat tidak terhubung ke komputer. Header disediakan untuk interfacing ke pin I / O menggunakan 22 g kawat atau kepala konektor. Bahasa pemrograman Arduino adalah versi sederhana dari C/C ++4. Arduino ditunjukkan pada Gambar 2.
Gambar 1 LDR
4
Motor Servo
Motor servo pada dasarnya adalah sebuah kopling dari motor DC untuk potensiometer sedemikian rupa sehingga rangkaian kontrol dapat menentukan posisi absolut dari rotor. Biasanya poros dari motor DC akan diarahkan untuk mendorong lengan cam sehingga sejumlah besar torsi dapat dikembangkan. sebuah motor servo terdiri dari susunan motor dc gir dan sebuah potensiometer. Adapun bagaian-bagian yang menyusun motor servo dan bagian servo pada saat disatukan maka akan terlihat pada Gambar 3.
METODE
Waktu dan Tempat Penelitian
Penelitian dilakukan di Laboratorium sensor, Departemen Fisika, FMIPA, IPB dari bulan Juni 2013 sampai Februari 2014.
Alat dan Bahan
Peralatan yang digunakan dalam penelitian ini ialah sebuah laptop dengan processor Pentium Dual Core CPU T4200, 2.00 GHz, HDD 250GB, Memory 1GB, Software yang digunakan dalam penelitian ini ialah MS.Office 2010, Google SketchUp, ISIS Proteus 7, MATLAB 2008, dan sistem logic Arduino1.5.5. Komponen yang digunakan Microcontroller ARDUINO UNO, motor servo, panel surya, resistor, kapasitor, LDR, IC 7805, trimpot 50K Ω dan baterai 9V. Pendukung penelitian ini berupa sumber pustaka, baik jurnal-jurnal ilmiah, tesis, maupun sumber lain yang relevan.
5 Studi Pustaka
Studi pustaka dilakukan untuk memahami macam – macam sistem penggerak panel surya dan menentukan mecrocontroler beserta motor servo yang akan digunakan, sehingga memudahkan perancangan sistem penggerak panel surya. Studi pustaka akan membantu penulis dalam menentukan derajat kebebasan untuk mendeksi sinar matahari.
Perancangan Dual Axis Tracking System
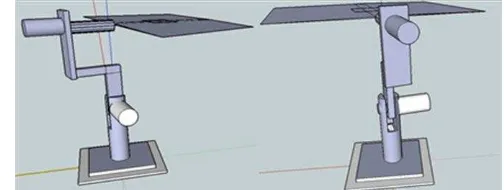
Pada Gambar 4 merupakan perancangan dual axis tracking system yaitu panel surya akan bergerak dengan dua derajat kebebasan dengan menggunakan dua motor Servo, motor servo yang pertama akan menggerakan panel surya dari selatan ke utara, sedangkan motor servo kedua akan menggerakan panel surya dari timur ke barat.
Perancangan sensor
Pada Gambar 5 sensor pelacakan terdiri dari empat sensor LDR yang sama, yang terletak di timur, barat, selatan, dan utara untuk mendeteksi intensitas sumber cahaya. LDR sensor membentuk sudut 90° untuk setiap LDR. Sensor diberikan kurungan agar sinar matahari yang di terma LDR lebih fokus sehingga lebih cepat menentukan posisi matahari, bagian tengah sensor dibuat tinggi supaya tercipta bayangan, dan bayangan itu akan dijadikan sebagai penanda bahwa sensor tersebut belum tegak lurus dengan matahari, sehingga selama LDR masih ada yang terkena bayangan maka panel surya akan terus bergerak sampai tidak ada bayangan.
Gambar 4 Perancangan dual axis tracking system
6
Pembuatan Rangkaian Sensor
Rangkaian pada sensor ini menggunakan prinsip pembagi tegangan seperti yang ditunjukkan pada Gambar 6, yang menggunakan empat LDR , empat resistor 1Kohm.
HASIL DAN PEMBAHASAN
Secara umum sistem kerja dari dual axis tracking system memanfaatkan intensitas sinar matahari yang mengenai LDR. LDR merupakan piranti elektronika yang peka terhadap cahaya yang akan menghasilkan perbedaan tegangan saat terkena cahaya. Informasi besar tegangan akan dibaca oleh Arduino Uno dengan sistem logic Arduino1.5.5. Arduino Uno bertindak sebagai pengendali yang mengelolah informasi besar tegangan dengan menggerakkan servo vertikal dan horizontal menuju posisi yang tepat agar didapatkan tegangan yang paling maksimum.
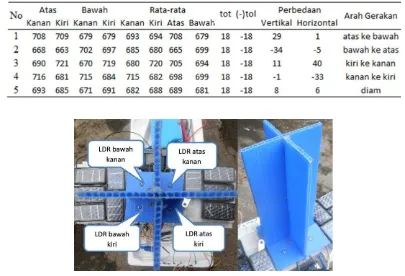
Pada penelitian ini, dual axis tracking system menggunakan empat LDR dengan fungsi masing – masing. Pada Gambar 8 terdapat empat LDR yang dibagi berdasarkan letaknya dan ditandai dengan atas, bawah, kiri dan kanan. LDR di
Gambar 6 Rangkaian pembagi tegangan
7 atas dan bawah berfungsi sebagai sensor gerak vertikal dan LDR di kanan dan kiri berfungsi sebagai sensor gerak arah horizontal. Pada tiap bagian LDR atas terdapat dua buah yaitu LDR atas kanan dan LDR atas kiri, begitu juga dengan bagian LDR bawah terdapat dua buah yaitu LDR bawah kanan, dan LDR bawah kiri, sedangkan pada bagian LDR kanan terdapat dua buah yaitu LDR atas kanan dan LDR bawah kanan, begitu juga dengan bagian LDR kiri terdapat dua buah yaitu LDR atas kiri, dan LDR bawah kiri. Tiap – tiap LDR tersambung dengan tegangan Vcc dan Ground.
Saat bagian LDR bawah terkena sinar matahari maka LDR tersebut akan mengalami penurunan tegangan dan bagian LDR atas terkena bayangan sehingga LDR atas mengalami kenaikan tegangan. Perubahan tegangan yang dihasilkan oleh masing – masing LDR akan dibaca oleh Arduino Uno untuk selanjutnya memicu bagian servo vertikal untuk bergerak mengikuti arah datangnya sinar matahari sampai keempat sensor LDR mendapatkan sinar yang sama, begitu juga untuk menggerakkan servo horizontal.
Tabel 1 adalah contoh hasil pembacaan tegangan (dalam bentuk nilai ADC) masing – masing LDR. Pada tabel nomer 1 dibaca LDR atas kanana, atas kiri, bawaah kanan, bawah kiri, kemudian diperoleh rata kanan dari penjumlahan atas kanan dan bawah kanan dibagi dua, begitu juga untuk rata kiri, rata atas dan rata bawah, sedangkan toleransi (-18 sampai 18) terbaca dari trimpot, yang berfungsi sebagai sensitifitas, kemudian perbedaan vertikal didapat dari selisih rata atas dan rata bawah sedangkan perbedaan horizontal didapat dari selisih rata kiri dan rata kanan, karena pada nomer 1 nilai perbedaan vertikal diluar toleransi maka motor servo bergerak dari atas ke bawah dan perbedaan horizontal di dalam rentang toleransi maka tidak terjadi pergerakan.
Tabel 1 Tegangan keluaran LDR yang terbaca oleh Arduino Uno
8
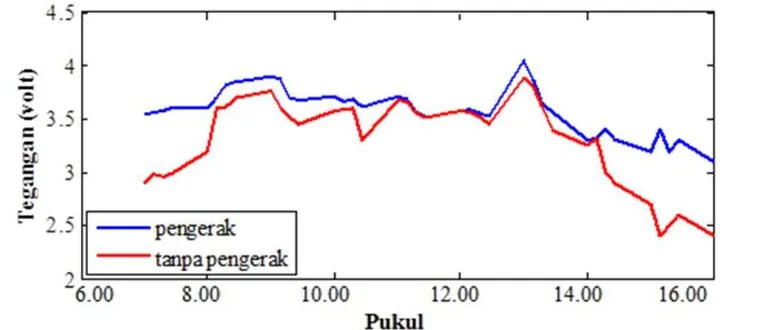
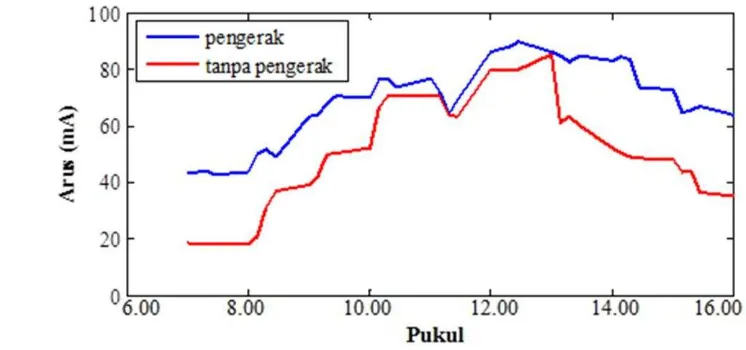
Hasil pengujian tegangan dan arus yang dihasilkan panel surya statis maupun menggunakan dual axis tracking system ditunjukkan pada Gambar 9 sampai 17. Pengambilan data ini dilakukan selama tiga hari dari pukul 7.00 sampai 16.00. Hasil pengukuran arus dan tegangan terdapat pada Lampiran 3 dan 4. Karakteristik waktu terhadap tegangan dan arus ditunjukkan pada gambar 9 sampai 14.
Gambar 9 Karakteristik tegangan keluaran dari pukul 7.00 - 16.00 di hari pertama
Gambar 10 Karakteristik tegangan keluaran dari pukul 7.00 - 16.00 di hari kedua
9 Dari ketiga grafik pada Gambar 9 sampai 11 terlihat jelas perbedaan tegangan keluaran yang terukur antara panel surya yang menggunakan penggerak dan tanpa pengerak. Tegangan keluaran lebih besar panel surya yang menggunakan penggerak, perbedaan yang signifikan tejadi antara pukul 7.00 sampai pukul 10.00 dan pukul 14.00 sampai pukul 16.00, hal ini disebabkan karena pada pukul 7.00 sampai pukul 10.00 posisi matahari berada di timur sehingga posisi penampang panel surya dinamis bergerak menghadap ke timur dan mengakibatkan intensitas matahari yang diterima tegak lurus dengan penampang panel surya dinamis, sedangkan posisi penampang panel surya statis tetap menghadap ke atas mengakibatkan intensitas matahari yang diterima oleh penampang panel surya statis tidak tegak lurus, begitu juga saat pukul 14.00 sampai pukul 16.00 matahari beradi di barat sehingga posisi penampang panel surya dinamis bergerak menghadap ke barat dan mengakibatkan intensitas matahari yang diterima tegak lurus dengan penampang panel surya dinamis, sedangkan posisi penampang panel surya statis tetap menghadap ke atas mengakibatkan intensitas matahari yang diterima oleh penampang panel surya statis tidak tegak lurus.
Fluktuasi yang terdapat pada grafik disebabkan oleh kondisi awan, saat mendung matahari tertutup awan sehingga intensitas yang diterima panel surya berkurang dan saat terik intensitas yang diterima panel surya maksimum.
Untuk mendapatkan nilai efektifitas panel surya diperlukan perbandingan energi antara panel surya yang digerakkan menggunakan pengerak dual axis tracking sytem dan panel surya tanpa penggerak dengan menggunakan persamaan (1):
dengan memisalkan Pg adalah output dengan penggerak dan Ptg adalah output tanpa penggerak. Dalam pengambilan data selama tiga hari dengan menggunakan persamaan (1) didapatkan rata – rata tegangan surplus sebesar 8.12% ketika menggunakan penggerak dual axis tracking sytem.
10
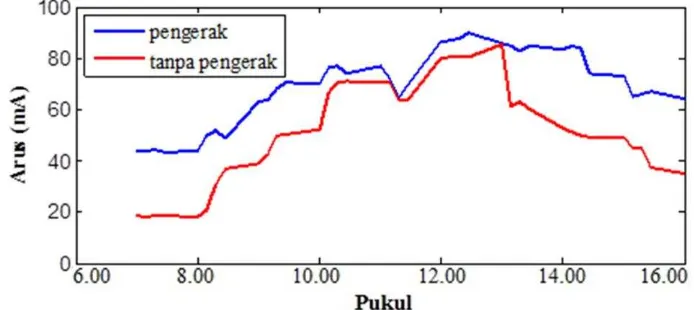
Pada Gambar 12 sampai 14 terlihat bahwa arus yang dihasilkan panel surya yang menggunakan penggerak lebih besar dibandingkan tanpa pengerak. Pengukuran arus pada panel surya yang menggunakan dual axis tracking sytem selama tiga hari didapatkan rata – rata yang tidak jauh berbeda yaitu pada hari pertama 69.35838 mA, hari kedua 69.41324 mA, dan hari ketiga 69.38649 mA. Sama halnya dengan pengukuran arus dengan menggunakan panel surya tanpa penggerak memiliki rata – rata yang tidak jauh berbeda dari setiap harinya, yaitu pada hari pertama 51.10359 mA, hari kedua 51.06954 mA, dan hari ketiga 51.21576 mA. Surplus arus saat menggunakan penggerak panel surya dapat dihitung dengan menggunakan persamaan (1) sehingga diperoleh sebesar 35.48%.
Nilai tegangan dan arus untuk panel surya dinamis terdapat pada lampiran 3 sedangkan untuk panel yang statis terdapat pada Lampiran 4. Data tengangan dan arus dapat digunakan untuk menghitung daya keluaran panel surya. Perhitungan dilakukan dengan menggunakan persamaan (2):
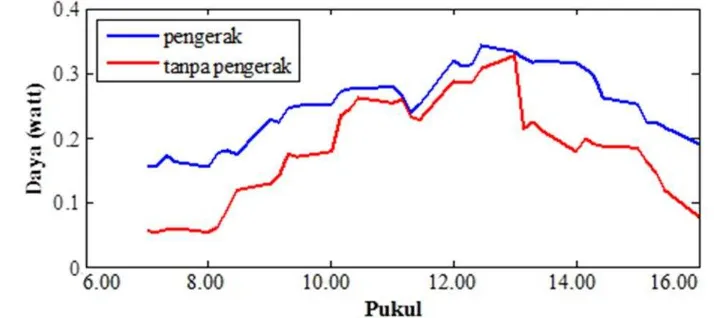
P = I x V (2) dengan P adalah daya , V adalah tegangan, dan I adalah arus. Hasil penghitungan daya untuk panel surya dinamis maupun statis terdapat pada lampiran 5. Perbedaan daya keluaran antara panel surya yang di gerakkan dan panel surya yang statis terhadap waktu dapat diliat pada Gambar 15 sampai 17.
Gambar 13 Karakteristik arus keluaran dari pukul 7.00 - 16.00 di hari kedua
11
Berdasarkan Gambar 15 sampai 17 secara keseluruhan daya yang diperoleh dari hasil pengujian pada keluaran panel surya yang menggunakan pengerak dual axis tracking sytem antara hari pertama, kedua, dan ketiga hasilnya lebih besar jika dibandingkan dengan pengujian daya keluaran sel surya statis. Hasil perhitungan daya rata-rata pada hari pertama 0.248122 watt, hari kedua 0.25075 watt, dan hari ketiga 0.250937 watt. Daya yang terukur pada keluaran panel surya
Gambar 15 Karakteristik daya keluaran dari pukul 7.00 - 16.00 di hari pertama
Gambar 16 Karakteristik daya keluaran dari pukul 7.00 - 16.00 di hari kedua
12
tanpa penggerak memiliki rata – rata dihari pertama 0.173369 watt, hari kedua 0.172309 watt, dan hari ketiga 0.180102 watt. Nilai efektifitas pengerak dual axis tracking sytem mengalami peningkatan energi sebesar 42.6 %.
SIMPULAN DAN SARAN
Simpulan
Dari hasil penelitian ini dapat disimpulkan beberapa hal yaitu rangkaian sensor pendeteksi pergerakan matahari dengan empat LDR mampu menempatkan posisi permukaan panel tegak lurus dengan arah sinar datang matahari. Dan surplus tegangan, arus dan daya yang dihasilkan panel surya saat digerakkan mengikuti matahari yaitu 8.12%, 35.48% dan 42.6 %.
Saran
Penelitian ini dibatasi pada pembuatan prototype dual axis tracking system sehingga untuk penelitian selanjutnya disarankan untuk menerapkan sistem prototype ke dalam sistem real. Sistem real ini menggunakan panel surya berukuran besar. Sehingga dapat diperoleh nilai efektivitas dalam kondisi real.
DAFTAR PUSTAKA
1. Ribeiro, Antonio, Moreira, Martin, Pereira. 2008. Development of a Sun Tracker. Universidade Federal de Viçosa, Av. P. H. Rolfs ,s/nº ,Viçosa, Minas
Gerais.
2. Rizk J, Chaiko Y.2008. Solar Tracking System More Efficient Use of Solar Panels. World Academy of Science, Engineering and Technology. 3. Deepthi S, Ponni A, Ranjitha R , Dhanabal R. 2013. Comparison of
Efficiencies of Solar Tracker systems with static panel Single - Axis Tracking System and Dual-Axis Tracking System with Fixed Mount. International Journal of Engineering and Technology (IJET), ISO 9001. 4. W. Durfee, University of Minnesota. 2011. Arduino Microcontroller Guide
[internet]. [diacu 2013 September 8]. Tersedia dari www.me.umn.edu/courses/me2011/arduino/
5. David B, Joshua. 2007. Applications Of Solar Energy To Power Stand Alone And Street Ligting [Thesis]. University Of Missouri Rolla.
13 7. Kais I, Abdul-lateef. 2012. A Low Cost Single Axis Sun Tracker System Using Pic Microcontroler. Iraq-Bagdad: Diyala Journal of Engineering Sciences.
8. Jing-Min Wang. 2013. Design and Implementation of a Sun Tracker with a Dual-Axis Single Motor for an Optical Sensor-Based Photovoltaic System. Taipei : Department of Electrical Engineering, St. John’s University.
9. Dewanto H. 2010. Model Panel Surya Cerdas Dengan Pelacak Cahaya Matahari Otomatis Berbasis Mikrokontroler. Kentingan Surakerta: Fisika FKIP UNS.
10.Vladislav Poulek. 2010. New Bifasial Solar Tracker and Tracking Concentrators. Czech Republic : Czech University of Agriculture in Prague
14
15
16
Lampiran 3 Nilai tegangan dan arus untuk panel surya yang menggunakan sistem penggerak panel surya dual axis
Penggerak Waktu
WIB
17
Lampiran 4 Nilai tegangan dan arus untuk panel surya tanpa penggerak (statis) Tanpa Penggerak
18
Lampiran 5 Daya keluaran untuk panel surya menggunakan penggerak dan tanpa penggerak
Waktu WIB
Penggerak Tanpa Penggerak
19 Lampiran 6 Algoritma ploting data pada MATLAB
20
legend('pengerak','tanpa pengerak');
plot(t,W1,'-b',t,W1n,'-r', 'linewidth',2);
xlabel('Waktu (jam)'); ylabel('Daya (watt)'); legend('pengerak','tanpa pengerak');
plot(t,W2,'-b',t,W2n,'-r', 'linewidth',2);
xlabel('Waktu (jam)'); ylabel('Daya (watt)'); legend('pengerak','tanpa pengerak');
plot(t,W3,'-b',t,W3n,'-r', 'linewidth',2);
xlabel('Waktu (jam)'); ylabel('Daya (watt)'); legend('pengerak','tanpa pengerak');
21 Lampiran 7 Algoritma pengerak dual axis tracking sytem
#include <Servo.h> // include Servo library Servo horizontal; // horizontal servo
int servoh = 90; // kondisi horizontal servo int ldrbaka = 3; //LDR bawah kanan void setup()
int aki = analogRead(ldraki); // atas kiri int aka = analogRead(ldraka); // atas kanan int baki = analogRead(ldrbaki); // bawah kiri int baka = analogRead(ldrbaka); // bawah kanan
int dtime = analogRead(4)/15; // membaca potentiometers int tol = analogRead(5)/4; Serial.print("kanan= ");
Serial.print(aka); Serial.print(" kiri= "); Serial.print(aki);
22
Serial.print(baka);
Serial.print(" bwh kiri= "); Serial.println(baki);
int pvert = ava - avba; // check perbedaan nilai average atas dan bawah int phoriz = avki - avka;// check perbedaan nilai average kiri dan kanan Serial.print("pvert= ");
Serial.print(pvert);
Serial.print(" phoriz= "); Serial.println(phoriz);
Serial.print("ratakiri= "); Serial.print(avki);
23
RIWAYAT HIDUP
Penulis dilahirkan di Pamekasan 20 Juni 1991, merupakan anak pertama dari pasangan Nasiruddin dan Sitti Farhah. Pada tahun 2003 penulis masuk SMPN 2 Pamekasan sampai tahun 2007. Kemudian penulis melanjutkan sekolah ke SMAN 1 Pamekasan sampai tahun 2010. Setelah lulus SMAN 1 penulis diterima USMI untuk melanjutkan pendidikan ke Institut Pertanian Bogor dan diterima di Departemen Fisika Fakultas Matematikan dan Ilmu Pengetahuan Alam Institutut Pertanian Bogor.