SIMULASI SISTEM KONTROL AUTOPILOT PADA GERAK
LONGITUDINAL PESAWAT MENGGUNAKAN METODE PEMBENTUKAN LUP PID
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar sarjana sains
:
040801029
HANDRI YOGI LESTARI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : Simulasi Sistem Kontrol Autopilot Pesawat
Pada Gerak Longitudinal Dengan Menggunakan Metode Pembentukan Lup PID
Kategori : Skripsi
Nama : Handri Yogi Lestari
Nim : 040801029
Program Studi : Sarjana (S1) Fisika Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam (FMIPA) Universitas Sumatera Utara
Disetujui Oleh
Departemen Fisika FMIPA USU Pembimbing
Ketua
PERNYATAAN
DESAIN DAN SIMULASI SISTEM KONTROL AUTOPILOT PADA GERAK LONGITUDINAL PESAWAT DENGAN MENGGUNAKAN METODE
PEMBENTUKAN LUP PID SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan,12 Januari 2010
Handri Yogi Lestari
Penghargaan
Puji dan syukur penulis panjatkan kepada Allah SubhanahuWata'ala, Tuhan
sekalian alam yang maha perkasa, karena dengan kemurahanNya skripsi ini dapat saya
selesaikan . Tiada sesuatu yang terjadi di bumi ini tanpa izin-Mu ya Rabb.
Ucapan terimakasih yang sebesar-besarnya saya sampaikan kepada bapak
Drs,Luhut Sihombing.MS, yang telah dengan sabar membimbing saya, serta untuk
semua kebaikan yang diberikan selama saya menyelesaikan tugas akhir ini. Ucapan
terima kasih juga saya ucapkan kepada ketua departemen dan sekeretaris departemen
fisika bapak Dr.Marhaposan Situmorang dan ibu Dra Yustinon,M.Sc.Kepada Staf
LIDA dan Kepala Laboratorium Fisika Dasar bapak Achirudin,M.Sc, Dekan dan
Pembantu Dekan FMIPA USU, seluruh Staf pengajar dan pegawai Departemen.
Saya juga ingin mengucapkan terima kasih kepada rekan-rekan saya selama
kuliah, rekan saya sesama asisten Laboratorium Fisika Dasar dan Laboratorium
Pemrograman khususnya kepada teman dekat saya Toni , Jepri, Rio Tambunan, Alex,
Andi Zemba, Winston, Rocky, Glenn, Elyas,Eka, Maulina, Susi,D aniel, serta
teman-teman saya di fakultas teknik, pertanian, ekonomi, dan sastra dan banyak lagi yang
tidak bisa saya sebutkan disini satu persatu..
Akhirnya, penghargaan yang setinggi-tingginya saya berikan kepada keluarga
saya, yaitu bapak saya (Harianto) ,ibu saya (Nana Muskori), untuk semua dorongan,
kesabaran, ketabahan dan pengorbanan yang tidak terkira yang diberikan kepada saya,
kepada kakak dan adik saya satu-satunya (Hindri Winasari) dan (Rara Wulandari),
untuk semua semangat yang saya dapat.Kiranya tanpa doa dan dukungan kalian
semualah saya tidak akan mendapatkan pengalaman hidup yang berharga seperti yang
ABSTRAK
Kontroler PID adalah kontroler yang paling banyak digunakan di industri,
instrumentasi dan peralatan laboratorium termasuk bidang penerbangan. Kontroler ini
banyak digunakan karena mudah untuk dikombinasikan dengan kontroler lain. Pada
tugas akhir ini dilakukan penentuan nilai konstanta penguatan kontroler proporsional
p
K , kontroler integral K dan kontroler diferensial i K untuk memenuhi spesifikasi d
sistem yang diinginkan dari gerak longitudinal pesawat dengan menggunakan metode
pembentukan lup, dimana nilai konstanta kontroler ditentukan dengan menggunakan
analisis respons frekuensi dari plot bode dari plant. Keunggulan dari metode
pembentukan lup adalah tidak perlu lagi digunakan tuning untuk mencari nilai
Abstract
PID controllers is the commonly used in industry, in instruments and
laboratory equipment including aerospace subject. This controllers commonly used
because it is easy to combine with another controllers. In this papers the controllers
constants for Proportional controller Kp, Integral controller K and Diferential i
controller K for obtain required systems for longitudinal motion of aircraft are d
determine by using loop shaping method where is the controller constans determine
by analyze frequency respons of bode plot from plant. The advantage of loop shaping
DAFTAR ISI
Halaman
LEMBAR PERSETUJUAN ... i
LEMBAR PERNYATAAN ... ii
PENGHARGAAN ... iii
ABSTRAK ... iv
ABSTRACT ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... ix
BAB I PENDAHULUAN I.1. Latar Belakang Masalah ... 1
I.2. Tujuan Penelitian ... 2
I.3. Batasan Masalah ... 3
I.4. Manfaat Penelitian ... 4
I.5. Metode Penelitian ... 4
I.6. Sistematika Penulisan ... 5
BAB II LANDASAN TEORI II.1. Anatomi Pesawat...6
II.2. Pengertian gerak longitudinal pesawat... 10
II.3. Kriteria kestabilan Nyquist ... ..10
II.4. Diagram Logaritmik dan Grafik Bode ... ..11
II.5. Kontroler PID ... ..12
II.5.1. Kontroler Proporsional ... ..12
II.5.2. Kontroler integral ... ...12
II.5.2. Kontroler Diferensial...13
II.6. Metode Pembentuka Lup PID ... ....14
II.6.1.Kontroler Proporsional Plus Integral...15
II.6.2.Kontroler Proporsional Plus Diferensial ... ....16
BAB III Pemodelan dan Perancangan Sistem
III.1. Penurunan Persamaan Gerak ... 19
III.2. Penurunan dan Pemodelan Fungsi Alih ... 31
III.3. Fungsi alih dinamik pesawat untuk gerak longitudinal... 35
III.3.1. Pendekatan Osilasi Periode Pendek... 37
III.3.2. Pendekatan Phugoid ... 38
III.4. Spesifikasi sistem ... 39
BAB IV Desain dan Simulasi Sistem IV.1. Respon lup terbuka ... 48
IV.1.1. Respons lup terbuka mode gerak osilasi ... 48
IV.1.2. Respons lup terbuka mode gerak phugoid ... 50
IV.2. Respons lup tertutup ... 51
IV.2.2 Respons lup tertutup mode gerak osilasi………...51
IV.2.3 Respons lup tertutup mode geak phugoid…………...53
IV.3. Perancangan Kontroler P, I dan D dengan pembentukan LUP…....55
IV.3.1 Mode Gerak Osilasi………...55
IV.3.2 Mode Gerak Phugoid……….65
BAB V KESIMPULAN DAN SARAN V.1. Kesimpulan ... 74
V.2. Saran ... 76
DAFTAR GAMBAR
Gambar 2.1 Anatomi Pesawat ... 6
Gambar 2.2 Kontrol Permukaan pesawat ... 7
Gambar 2.3 Sumbu gerak dan titik pusat berat ... 8
Gambar 2.4.a Gerak mengguling pesawat ... 9
Gambar 2.4.b Gerak longitudinal pesawat ... 9
Gambar 2.4.c Gerak menggeleng pesawat ... 9
Gambar 2.5 Kontroller Diferensial ...13
Gambar 3.1 Sumbu kesetimbangan dan gangguan pesawat ... 26
Gambar 3.2 Gerak longitudinal pesawat ... 33
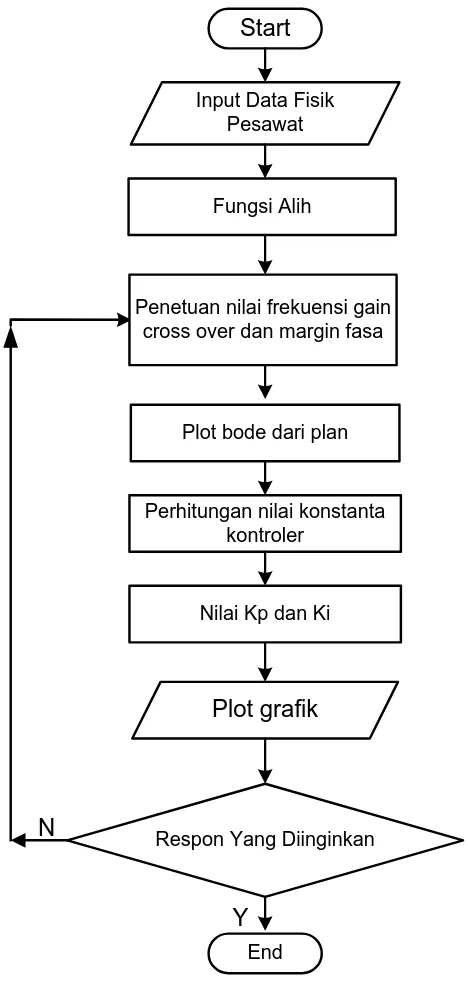
Gambar 3.3 Flowchart Untuk menentukan nilai konstanta kontroller PI... 45
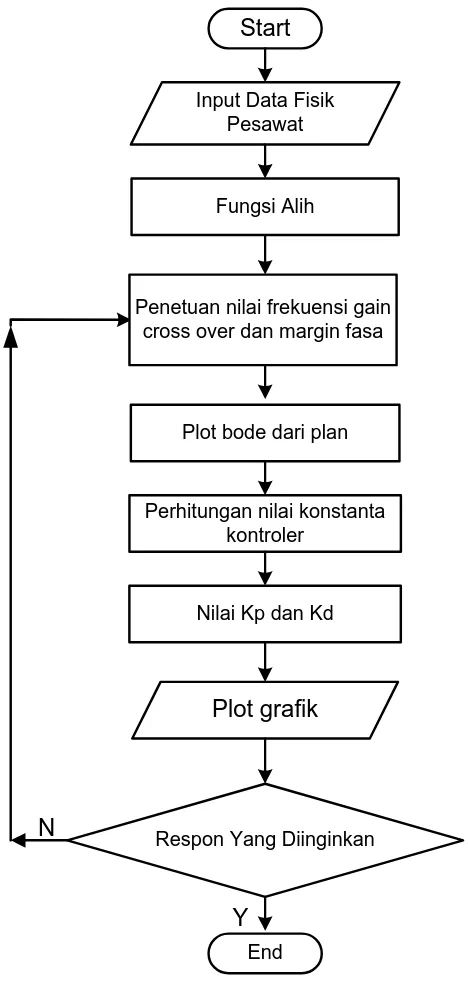
Gambar 3.4 Flowchart Untuk menentukan nilai konstanta kontroller PD ... 46
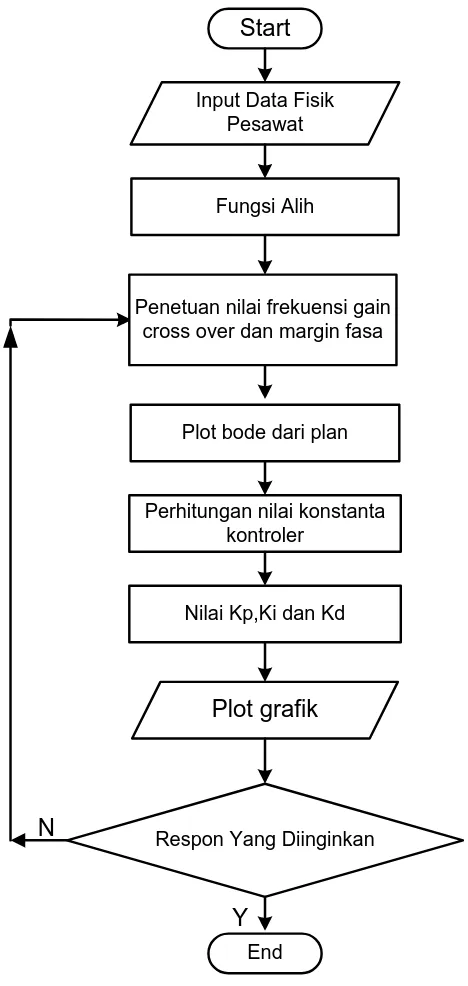
Gambar 3.2 Flowchart Untuk menentukan nilai konstanta kontroller PID ... 47
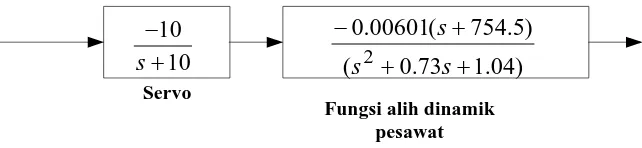
Gambar 4.1 Diagram blok lup terbuka kontrol sudut serang ... 48
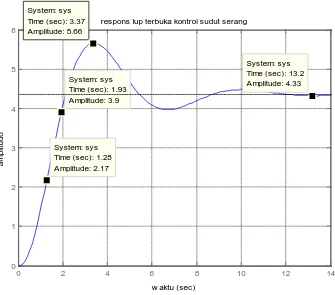
Gambar 4.2 Grafik simulasi kontrol sudut serang lup terbuka ... 49
Gambar 4.3 Diagram blok lup terbuka kontrol sudut ketinggian ... 50
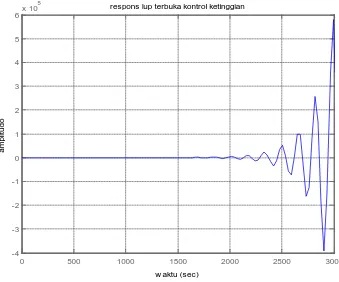
Gambar 4.4 Grafik simulasi lup terbuka kontrol sudut ketinggian ... 50
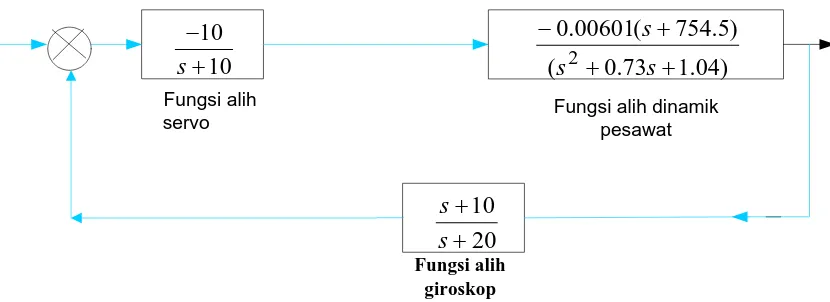
Gambar 4.5.Diagram blok lup tertutup kontrol sudut serang ... 51
Gambar 4.6 Grafik simulasi lup tertutup kontrol sudut serang ... 52
Gambar 4.7 Diagram blok lup tertutup kontrol ketinggian ... 53
Gambar 4.8 Grafik simulasi lup tertutup kontrol ketinggian... 54
Gambar 4.9 Diagram blok lup tertutup kontrol sudut serang dengan kontroler ... 55
Gambar 4.10 Diagram blok kontrol sudut serang yang disederhanakan... 56
Gambar 4.11 Diagram bode plant kontrol sudut serang ... 56
Gambar 4.12 Grafik simulasi kontrol sudut serang dengan kontroler PI ... 58
Gambar 4.13 Diagram bode kontrol sudut serang dengan kontroler PI ... 59
Gambar 4.14 Grafik simulasi kontrol sudut serang dengan kontroler PD ... 60
Gambar 4.15 Diagram bode kontrol sudut serang dengan kontroler PD ... 61
Gambar 4.17 Diagram bode kontrol sudut serang dengan kontroler PID ... 64
Gambar 4.18 Diagram blok lup tertutup kontrol sudut ketinggian ... 65
Gambar 4.19 Diagram blok kontrol sudut ketinggian yang disederhanakan ... 66
Gambar 4.20 Diagram bode plant kontrol sudut ketinggian ... 66
Gambar 4.21 Grafik simulasi kontrol sudut ketinggian dengan kontroler PI ... 68
Gambar 4.22 Diagram bode kontrol sudut ketinggian dengan kontroler PI... 69
Gambar 4.23 Grafik simulasi kontrol sudut ketinggian dengan kontroler PD ... 70
Gambar 4.24 Diagram bode kontrol sudut ketinggian dengan kontroler PI... 71
Gambar 4.25 Grafik simlulasi kontrol sudut ketinggian dengan kontroler PID ... 73
ABSTRAK
Kontroler PID adalah kontroler yang paling banyak digunakan di industri,
instrumentasi dan peralatan laboratorium termasuk bidang penerbangan. Kontroler ini
banyak digunakan karena mudah untuk dikombinasikan dengan kontroler lain. Pada
tugas akhir ini dilakukan penentuan nilai konstanta penguatan kontroler proporsional
p
K , kontroler integral K dan kontroler diferensial i K untuk memenuhi spesifikasi d
sistem yang diinginkan dari gerak longitudinal pesawat dengan menggunakan metode
pembentukan lup, dimana nilai konstanta kontroler ditentukan dengan menggunakan
analisis respons frekuensi dari plot bode dari plant. Keunggulan dari metode
pembentukan lup adalah tidak perlu lagi digunakan tuning untuk mencari nilai
Abstract
PID controllers is the commonly used in industry, in instruments and
laboratory equipment including aerospace subject. This controllers commonly used
because it is easy to combine with another controllers. In this papers the controllers
constants for Proportional controller Kp, Integral controller K and Diferential i
controller K for obtain required systems for longitudinal motion of aircraft are d
determine by using loop shaping method where is the controller constans determine
by analyze frequency respons of bode plot from plant. The advantage of loop shaping
BAB I
PENDAHULUAN
I.1 Latar Belakang Masalah.
Rancangan pesawat yang kurang stabil namun lebih dapat bermanuver
diperkenalkan oleh wright bersaudara.Rancangan dari pesawat yang kurang stabil ini
mengakibatkan pekerjaan pilot menjadi lebih sulit dan lebih melelahkan,sehingga
muncul ide untuk membentuk suatu sistem pilot automatis atau sering disebut sebagai
autopilot. Tujuan awal dan utama dari perancangan sistem autopilot adalah untuk
mengembalikan perilaku pesawat setelah terjadi beberapa gangguan.
Automatic pilot yang disingkat sebagai AUTOPILOT adalah peralatan
otomatis yang terdiri dari peralatan mesin dan elektronik yang dapat menggerakkan
sendiri peluru kendali atau pesawat. Sistem fisik dari kontrol autopilot pesawat dapat
direpresentasikan dalam fungsi-fungsi matematis. Artinya karakteristik dari masukan
maupun keluaran sistem kontrol dapat dinyatakan sebagai sekumpulan persamaan
matematis. Dengan mendapatkan fungsi-fungsi masukan dan keluaran dapat dirancang
suatu sistem kontrol autopilot yang optimal dan stabil.
Pada sistem kontrol autopilot pesawat pada dasarnya terdiri atas dua sistem,
yaitu sistem lup terbuka dan sistem lup tertutup. Untuk merancang suatu sistem
kontrol yang optimal dapat digunakan metode pembentukan lup. Dimana metoda
pembentukan lup adalah suatu metoda dimana kita mencoba untuk memilih kontroller
sehingga fungsi transfer lup memenuhi dari bentuk yang diinginkan. Apabila lup yang
diinginkan telah sesuai maka kita dapat melihat dari plot kriteria Nyquist-nya.
Perancangan kontrol PID (Proporsional,Integral,Diferensial) dengan
menggunakan metoda pembentukan lup bertujuan untuk memenuhi stabilitas serta
mengantisipasi pengaruh gangguan yang mungkin terjadi pada kondisi nyata jika
Perancangan controller PID selama ini menggunakan metoda trial and error
dengan perhitungan yang memakan waktu lama, MATLAB yang dilengkapi kontrol
toolbox membantu perancang untuk melihat respon berbagai kombinasi konstanta
dengan variasi input yang berbeda.Penggunaan MATLAB sangat membantu
perancang dalam menentukan kombinasi di antara P (Proporsional) ,I (Integral) dan D
(Diferensial) kontroler untuk menghasilkan sistem pengaturan yang baik dan
sederhana.
I.2.Tujuan Penelitian
Adapun yang menjadi tujuan dari penelitian ini adalah sesuai dengan latar belakang
yang telah dinyatakan sebelumnya yaitu:
1. Mengetahui parameter-parameter yang mempengaruhi dalam
perancangan kontroler PID dengan menggunakan metode pembentukan
LUP.
2. Menganalisa kestabilan sistem pada sistem kontrol autopilot yang
dirancang.
3. Menggunakan metoda pembentukan lup PID (Proporsional Integral
Diferensial) untuk mendapatkan sistem kontrol yang stabil terhadap
gangguan perubahan.
4. Untuk mendapatkan nilai konstanta penguatan dengan menggunakan
I.3. Batasan Masalah
Batasan Masalah dalam penulisan tugas akhir yang saya buat adalah sebagai
berikut yaitu:
1. Pada Simulasi ini tidak membahas komponen penyusun pesawat.
2. Pada simulasi ini sistem kontrol yang didesain adalah sistem kontrol dinamik
didesain dengan menggunakan metoda pembentukan loop PID
3. Gerak pesawat yang dibahas hanyalah gerak longitudinal pesawat yang
meliputi :
a.kontrol sudut serang pada mode gerak osilasi periode pendek (short
period oscilation)
b.kontrol sudut ketinggian pada mode gerak phugoid.
4. Pada simulasi ini analisis kestabilan berdasarkan metoda respons frekuensi dan
metoda kestabilan Nyquist.
5. Massa pesawat dianggap konstan
6. Pesawat dianggap sebagai benda tegar
7. Bumi adalah kerangka acuan inersial
8. Tidak membahas mengenai aerodinamika pesawat
9. Tipe pesawat yang digunakan dalam simulasi adalah tipe pesawat tempur
I.4 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah :
1. Mengetahui analisis kestabilan sistem di desain dengan menggunakan
metoda pembentukan lup PID (Proporsional Integral Diferensial)
2. Meningkatkan pemahaman tentang kontrol autopilot pada pesawat
terbang khususnya pada gerak longitudinal pesawat
3. Meningkatkan pemahaman mengenai metoda pembantukan lup pada
sistem kontrol
I.5. Metode Penelitian
Adapun yang menjadi metodologi penelitian ini adalah sebagai berikut :
1. Melakukan studi literatur untuk mendapatkan persamaan gerak
pesawat.
2. Menurunkan fungsi transfer menggunakan data fisik dari pesawat dan
persamaan gerak.
3. Mendesain sistem dengan menggunakan metoda pembentukan lup PID.
4. Melakukan simulasi dan analisis respon dengan adanya kombinasi
I.6 Sistematika Penulisan
Penyusunan Tugas Akhir ini berurutan sesuai dengan penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini secara berturutan membahas tentang latar belakang,perumusan
masalah,tujuan penelitian dan sistematika penulisan.
BAB II: LANDASAN TEORI
Bagian ini menjelaskan tentang anatomi pesawat,kriteria kestabilan Nyquist
dan metode kedudukan akar,sistem kontrol lup terbuka dan sistem kontrol lup
tertutup,kontroller PID,metode pembentukan lup,dan dinamika gerak
longitudinal pesawat
BAB III: PEMODELAN SISTEM DAN PERANCANGAN
Bab ini menjelaskan tentang penurunan persamaan gerak longitudinal
pesawat,fungsi alih yang didapat dengan menggunakan prosedur
pembentukan lup PID
BAB IV: SIMULASI DAN ANALISIS
Pada bagian ini memberikan hasil simulasi serta analisa dan penjelasan dari
sistem kontrol untuk mendapatkan respon dari sistem
BAB V: KESIMPULAN
Bab ini memberikan kesimpulan dari hasil analisa dan simulasi desain
sistem kontrol gerak longitudinal pada pesawat terbang dengan
menggunakan metoda pembentukan lup
BAB II
LANDASAN TEORI
II.1.Anatomi Pesawat Terbang
Komponen utama dari pesawat terbang adalah ditunjukkan pada gambar 2.1.
Fuselage adalah badan pesawat,dimana bagian ini adalah bagian yang paling banyak
kegunaannya pada pesawat, fuselage membawa penumpang,barang bawaan dan
berbagai muatan,peralatan bahan bakar dan berbagai benda sesuai dengan rancangan
pesawat.Sayap adalah penghasil gaya angkat pada pesawat, volume internal dari
pesawat dapat digunakan untuk untuk menampung bahan bakar dan menyimpan
peralatan pendaratan (roda dan penopang (struts) pendukung) setelah pesawat lepas
landas. Penempatan dan penyesuaian ukuran stabilizer pada pesawat untuk
memberikan stabilitas pada pesawat selama melakukan penerbangan .
Flaps dan kontrol permukaan digambarkan pada gambar 2.2. Flaps digunakan
untuk menambah gaya angkat pesawat. Aileron adalah kontrol permukaaan yang
mengontrol gerak guling (rolling) pesawat,sebagai contoh, ketika aileron sebelah kiri
turun kebawah sedangkan aileron sebelah kanan naik ke atas, maka gaya angkat akan
bertambah pada sayap kiri sedangkan pada sayap kanan gaya angkatnya akan
berkurang yang akan menyebabkan pesawat akan berguling (roll) kearah
kanan.Elevator adalah kontrol permukaan yang mengatur gerak naik turun pesawat,
ketika elevator turun ke bawah maka gaya angkat pada ekor pesawat akan bertambah
dan menyebabkan ekor pesawat akan tertarik untuk naik sementara hidung pesawat
akan turun ke bawah. Rudder adalah kontrol permukaan yang dapat membelokkan
hidung pesawat ke kanan atau ke kiri.
Gambar 2.2 Kontrol Permukaan Pesawat (surface control)
Dengan meninjau pesawat pada gambar 2.3 dapat dilihat titik berat yang
dinotasikan sebagai cg. Sumbu orthogonal xyz adalah tetap; sumbu x disepanjang
fuselage, sumbu y disepanjang rentang sayap tegak lurus dengan dengan sumbu y, dan
sumbu z yang mengarah ke bawah yang tegak lurus dengan bidang xy. Gerak translasi
Gerak rotasi diberikan oleh komponen kecepatan angular P, Q, dan R.
Kecepatan rotasi ini menyebabkan momen L’, M dan N, pada sumbu x, y, dan z.
Gambar 2.3. Sumbu gerak dan titik pusat berat pesawat
Gerak rotasi di sepanjang sumbu x disebut sebagai gerak guling, L’ dan P
masing-masing disebut sebagai momen dan kecepatan. Gerak rotasi pada sumbu y
disebut gerak ketinggian (pitch); M dan Q masing-masing adalah momen dan
kecepatan. Gerak pada sumbu z disebut gerak geleng (yaw) dengan N dan R adalah
momen dan kecepatannya.
Tiga dasar kontrol pada gerak pesawat yaitu: aileron , elevator dan rudder
dimana ketiga komponen ini didsisain untuk mengubah kontrol dan momen pada
Gambar 2.4a.gerak mengguling (roll)
Gambar 2.4.b. gerak longitudinal
Gambar 2.4.c.kontrol gerak menggeleng (yawing)
Gambar 2.4
Mengacu pada gambar 2.2, dapat dilihat bahwa dari sini bahwa aileron
mengontrol gerak guling (roll) pesawat yang disebut sebagai disebut sebagai kontrol
lateral. Kemudian juga dapat dilihat bahwa dari sini elevator mengatur ketinggian
pesawat dan disebut sebagai kontrol longitudinal, dan dapat juga dilihat bahwa rudder
mengatur gerak geleng (yaw) dari pesawat,yang disebut sebagai kontrol langsung
II.2. Pengertian Gerak Longitudinal Pada Pesawat
Yang dimaksud sebagai gerak longitudinal pada pesawat adalah gerak yang
meliputi ekor sampai hidung pesawat, adapun yang termasuk pada gerak longitudinal
pesawat ini meliputi :
1. Kontrol elevator (kontrol sirip pengatur ketinggian)
2. Kontrol Sudut Serang
3. Kontrol kecepatan
Didalam gerak longitudinal pesawat terdapat dua mode gerak yang pertama
adalah mode gerak osilasi pendek dan yang kedua adalah mode gerak phugoid. Yang
dimaksud dengan mode gerak osilasi pendek adalah gerak yang teredam penuh (hal
ini dapat dilihat pada persamaan gerak 3.48). Yaitu gerak ini memiliki redaman yang
besar. Hal ini pada pesawat terbang mempengaruhi sudut serang α dan sudut
ketinggian pesawat θ. Sedangkan gerak dengan osilasi yang memiliki periode yang
panjang disebut sebagai mode gerak phugoid. Mode gerak phugoid mempengaruhi
dua parameter dalam gerak pesawat yaitu sudut ketinggian θ dan kecepatan u, pada
mode gerak phugoid ini sudut serang tidak berubah atau konstan.
II.3.Kriteria Kestabilan Nyquist
Dasar dari pemikiran analisis kestabilan Nyquist adalah untuk menyelidiki
kondisi sistem lup terbuka dengan yang berosilasi dengan osilasi yang dapat terjadi
apabila sistem memiliki umpan balik.
Respons frekuensi dari fungsi alih sistem dapat dinyatakan dengan memplot
) (jω
L kedalam diagram polar dimana L adalah: PC
L= ...(2.1)
Besar dari |L(jω)| disebut sebagai penguatan lup (loop gain) karena bagian ini menyatakan seberapa jauh sinyal dapat diperkuat. Keadaan osilasi dari sistem
diberikan oleh persamaan :
1 ) (jω0 =−
L ...(2.2)
Persamaan 2.2 menyatakan bahwa kurva Nyquist dari fungsi alih lup akan
melalui titik L=-1, yang disebut titik kritis (critical point). Dan sistem akan stabil
apabila |L( j )|<1 , yang berarti kurva Nyquist pada titik kritis -1 ada pada sisi kiri ω
kurva Nyquist. Untuk sistem yang tidak memiliki pole pada sisi sebelah kanan bidang
kompleks maka kondisi kestabilan adalah apabila plot Nyquist tidak mengelilingi titik
kritis -1.
Teorema kestabilan Nyquist adalah : Jika L(s) adalah fungsi transfer dari lup
untuk sistem berumpan balik negatif dan tidak memiliki pole pada bagian sebelah
kanan bidang kompleks
(
Res≥0)
maka sistem lup terttup akan stabil jika dan hanya jika kontur tertutup yang diberikan oleh Ω={
L( )
jω :−∞<ω<∞}
⊂Ctidak mengelilingi s =-1.II.4. Diagram Logaritmik atau grafik Bode
Fungsi alih sinusoida dapat dinyatakan dalam dua diagram terpisah , satu
merupakan diagram besar terhadap frekuesin dan yang satunya lagi adalah diagram
sudut fasa terhadap ferkuensi. Diagram Bode terdiri dari dua buah grafik; satu
merupakan diagram dari logaritma besar fungsi alih sinusoida; satu merupakan
diagram sudut fasa ; keduanya digambar terhadap frekuensi dalam skala logaritmik.
Dala metode pembentukan lup diagram Bode digunakan untuk menentukan besar dari
fungsi alih sinusoida dari fungsi alih, dan frekuensi crossover (ωgc) dari fungsi alih tersebut. Frekuensi crossover adalah frekuensi yag menyebabkan besar fungsi alih lup
II.5 Kontroller PID
Kontroler adalah komponen yang berfungsi meminimalisasi sinyal kesalahan.
Tipe kontroler yang paling banyak digunakan adalah controller PID. Elemen kontroler
P,I dan D masing-masing secara keseluruhan bertujuan untuk mendeteksi sinyal
kesalahan penggerak, mempercepat reaksi sistem dan menghasilkan perubahan awal
yang lain.
II.5.1 Kontroler Proporsional
Kontroler proporsional memiliki keluaran yang sebanding (proporsional)
dengan besarnya sinyal kesalahan, jika sinyal masukan dimisalkan sebagai m(t) dan
sinyal keluaran sebagai e(t) maka untuk kontroler proporsional, hubungan antara
keluaran kontroler m(t) dan sinyal kesalahan penggerak e(t) adalah
) ( )
(t K e t
m = p …(2.3)
Atau dalam besaran transformasi laplace,
p K s E
s M
= ) (
) (
…(2.4)
Dimana Kp adalah kepekaan proporsional atau penguatan. Perubahan pada
kontroler proporsional akan mengakibatkan sistem secara langsung mengubah
keluarannya sebesar konstanta pengalinya.
II.5.2 Kontroler Integral
Kontroler integral berfungsi untuk menghasilkan sistem yang memiliki
kesalahan keadaan tunak yang kecil. Kalau sebuah plant tidak memiliki elemen
Kontroler ini dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal
kesalahan. Keluaran kontroler ini merupakan penjumlahan yang terus menerus dari
perubahan masukannya.
Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga
keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran kontroler
integral merupakan luas bidang yang dibentuk oleh kurva kesalahan penggerak
Kontroler integral mempunyai karakteristik sebagai berikut:
1. Dapat menghilangkan error steady state, namun keluaran kontroler
membutuhkan selang waktu tertentu, sehingga respon sistem akan menjadi
lambat
2. Apabila sinyal kesalahan bernilai nol maka keluaran kontroler akan tetap
bertahan pada nilai sebelumnya
3. Jika sinyal kesalahan tidak berharga nol, maka keluaran akan menunjukkan
perubahan (kenaikan atau penurunan) yang dipengaruhi oleh besarnya nilai
kesalahan dan nilai K . i
II.5.3 Kontroler diferensial
Kontroler diferensial mempunyai sifat seperti suatu operasi derivative.
Perubahan yang sesaat pada masukan kontroler akan mengakibatkan perubahan yang
sangat besar dan cepat.
TdS
-+
E(s) M(s)Kontroler diferensial biasanya digunakan untuk mempercepat respon awal
system, tetapi tidak memperkecil kesalahan tunaknya (steady state error).
Adapun karakteristik dari suatu kontroler diferensial adalah:
1. Kontroler diferensial memberikan efek redaman pada sistem yang
berosilasi dan memperbaiki respon transient.
2. Jika sinyal kesalahan (error) berubah terhadap waktu, maka keluaran yang
dihasilkan kontroler tergantung pada nilai Td dan laju perubahan sinyal
kesalahan.
3. Kontroler diferensial mempunyai karakter untuk saling mendahului,
sehingga kontroler ini dapat menghasilkan koreksi yang signifikan sebelum
pembangkit kesalahan menjadi sangat besar. Oleh sebab itu kontroler
diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi
yang bersifat korektif, sehingga sistem akan menjadi stabil.
II.6.Metode pembentukan lup PID (loop shaping PID)
Metode pembentukan lup adalah suatu metoda yang berdasarkan analisis
Nyquist. Dengan menggunakan kriteria kestabilan Nyquist kita memplot Nyquist
fungsi alih lup terbuka untuk menentukan kestabilan sistem lup tertutup. Metode ini
bertujuan untuk mencari nilai penguatan kontroler yang paling tepat dari fungsi alih
lup terbuka dengan menganalisa fungsi alih L(jω)lup terbuka sistem tersebut.
Ada tiga kombinasi kontroler (Proporsional, Integral, Diferensial) yaitu
kontroler proporsional plus integral (PI), kontroler proporsional plus diferensial (PD),
dan kontroler proporsional plus integral plus diferensial (PID). Bentuk fungsi alih dari
II.6.1 Kontroler Proporsional Plus Integral
Kontroler proporsional plus integral didefenisikan dengan persamaan berikut
ini :
= +
∫
t
i p
p e t dt
T K t e K t C
0 ) ( )
( )
( …(2.5)
dengan mentransformasikan laplace maka persamaan diatas akan menjadi :
s T K K s C
i p p + =
)
( …(2.6)
Jika fungsi alih adalah L(s)=P(s)C(s) dan frekuensi crossover gain adalah ωgcmaka
fungsi alih L(s) dapat dituliskan dalam bentuk :
) ( ) ( )
(jω P jω C jω
L =
i gc
i gc
T T j
kP j
L
ω ω ω
ω
2 2
1 ) ( )
( = + …(2.7)
nilai konstanta penguatan proporsional dapat dihitung dengan menggunakan
persamaan :
( )
| |1 2 2
gc i
gc i gc
p P j
T T
K ω
ω ω +
= …(2.8)
nilai dari |P
( )
jωgc | dan ωgcdapat dilihat secara langsung dari plot Bode . Satu-satunya nilai variabel yang tidak diketahui dari pesamaan 2.8 adalah konstanta waktuintegral T . Nilai konstanta ini dapat ditentukan dengan menggunakan persyaratan i
II.6.2 Kontroler Proporsional Plus Diferensial
Dengan menggunakan diagram bode yang sama nilai penguatan Kpdapat ditentukan
dari persamaan yang mendefenisikan hubungan antara kontroler proporsional dan
diferensial yang dinyatakan sebagai:
dt t de T K K t
C( )= p+ p d ( ) ...(2.9)
dengan mentrasformasi lapalace persamaan diatas maka :
) 1 ( )
(s K T s
C = p + d ...(2.10)
karena fungsi alih adalah L(s)=P(s)C(s) dan frekuensi crossover gain adalah
gc
ω maka fungsi alih L(s) dapat dituliskan dalam bentuk :
) ( ) ( )
(jω P jω C jω
L =
2 2
1 ) ( )
(j KpP j gc Td
L ω = ω +ω …(2.11)
nilai konstanta Kpdapat ditentukan dengan menggunakan persamaan :
2 2
1 | ) (
| gc d
p P j T
K = ω +ω …(2.12)
sama seperti pada kontroler PI (Proporsional,Integral) nilai konstanta waktu T dapat d
II.6.3 Kontroler Proporsional Plus Integral Plus Diferensial.
Perancangan dari kontroler proporsional plus integral plus diferensial sangat banyak digunakan untuk menutupi kekurangan serta menggabungkan kelebihan dari
masing-masing kontroler.
Dengan menggabungkannya maka elemen-elemen kontroler P, I, dan D akan
mempercepat reaksi sebuah sistem. Dengan e(t) adalah sinyal masukan kontroler
sedangkan m(t) adalah sinyal keluarannya maka secara matematis dapat dituliskan
sebagai berikut: dt t de K dt t e K t e K t
C( ) p ( ) i t ( ) D ( )
0 +
+
=
∫
…(2.13)Dengan mentransformasi laplace persamaan diatas maka persamaan 2.13 menjadi:
+ +
= T s
s T K s C d i p 1 1 ) ( + + = s T s sT T s T K s C i d i i p 1 ) ( + + = s T s T T s T K s C i d i i p 1 ) ( 2 …(2.14)
Konstanta penguatan Kpdapat dicari dengan menggunakan hubungan antara
) ( ) ( )
(jω P jω C jω
L = sehigga:
) ( 1 ) ( ) ( ) ( 4 2 2 2 2 gc i gc gc d i i gc
p P j
T T T T K j C j P j L ω ω ω ω ω ω ω − + =
Maka nilai konstanta penguatanKp adalah :
| ( )|
1
4 2 2 2 2
gc i
gc
gc d i i gc
p P j
T T T T
K ω
ω
ω ω
− +
= …(2.16)
nilai konstanta waktu T dan i T didapat dari kombinasi masing-masing kontroler PI d
dan PD. Pada metoda pembentukan lup nilai konstanta penguatan Kpakan berubah
sesuai dengan kombinasi kontroler yang digunakan. Akan tetapi nilai K dan i K d
tidak dapat dihitung secara langsung seperti pada kontroler PI dan PD, melainkan
melalui hubungan :
10 log log
logKd = KpTd− …(2.17)
10 log log
log = −
i p i
T K
BAB III
PEMODELAN DAN PERANCANGAN SISTEM
Untuk memenuhi fungsi transfer dari pesawat hal pertama yang sangat penting
adalah menurunkan persamaan gerak dari pesawat. Persamaan gerak yang diturunkan
menerapkan hukum Newton tentang gerak yang menghubungkan antara penjumlahan
dari gaya-gaya luar serta memomentum linier dan angular serta percepatan dari
pesawat.
Pusat sumbu sistem didefenisikan sebagai pusat dari gravitasi pesawat.pada
umumnya, sumbu sistem dianggap tetap atau tidak bergerak.dan ikut berotasi terhadap
pesawat. Sebelum memulai proses penurunan terhadap persamaan gerak maka perlu
adanya asumsi-asumsi, diantaranya massa pesawat dianggap konstan, pesawat
dianggap sebagai benda tegar bumi dan atmosfir dianggap tidak bergerak dan sebagai
kerangka acuan inersial.
III.1. Penurunan Persamaan Gerak Pesawat
Persamaan gerak didapatkan dengan menerapkan hukum II Newton yang
menyatakan penjumlahan gaya luar (eksternal) pada sebuah benda haruslah sama
dengan laju perubahan momentum benda terhadap waktu dan penjumlahan momen
luar yang bekerja pada benda haruslah sama dengan laju perubahan momentum
angular. Pernyataan ini dapat ditulis dalam dua persamaan vektor.
∑
= mVT]
I dtd
F ( ) …(3.1)
Dan
∑
=]
Idt dH
M …(3.2)
Dimana ]I menyatakan laju perubahan vektor terhadap kerangka acuan inersial.
momen total terdiri atas gaya dan momen pada saat setimbang dan pada saat terdapat
gangguan maka persamaan 3.1 dan 3.2 dapat ditulis kembali menjadi
∑ ∑ ∑
F = F0 + ∆F …(3.3) Dan∑
M =∑
M0 +∑
∆M …(3.4) Persamaan 3.1 dapat juga diperluas untuk massa dan kecepatan yang berubah menjadi∑
∆ = +dt dV m V dt dm
F T T …(3.5)
Dengan menerapkan asumsi diatas yang menyatakan massa pesawat adalah konstan
maka persamaan 3.5 akan tereduksi menjadi
∑
∆ = dt dV mF T
…(3.6)
Komponen vektor kecepatan pada pesawat dapat saja berotasi sementara besarnya
berubah, maka derivativ kecepatan pesawat dapat dituliskan sebagai
T t
T
dt dV dt
dV
V ω 1
T
V + ×
= …(3.7)
Dimana
dt dVT
T
V
1 adalah perubahan kecepatan linier, ω adalah total kecepatan
angular pesawat terhadap bumi. V dan T ω dapat ditulis dalam bentuk komponennya masing-masing sebagai:
kW jV iU
dt dVT
T
V
1 =iU•+ jV•+kW• …(3.10)
ω×VT =
W V U
R Q P
k j i
…(3.11)
Persamaan 3.11 dapat juga ditulis menjadi:
ω×VT= i(WQ−VR)+ j(UR−WP)+k(VP−UQ) …(3.12)
∑
∆Fdapat ditulis untuk ketiga komponen sumbu X, Y dan Z, yaitu∑
∆Fx =m(U•+WQ−VR)∑
∆Fy =m(V•+UR−WP) )(W VP UQ
m
FZ = + −
∆ •
∑
…(3.13)Untuk mendapatkan persamaan gerak angular, maka dengan mengingat persamaan 3.2
yaitu:
∑
=]
I dt dHM …(3.14)
Dengan mendefinisikan bahwa H adalah momentum angular. Momentum dari
elemen massa dm dengan kecepatan sudut adalah ω akan sama dengan kecepatan tangensial dari elemen massa dm dari pusat rotasi. Kecepatan tangensial dapat
dinyatakan sebagai :
R
ω
Vtan = × …(3.15)
Dengan penambahan resultan momentum dari kecepatan tangensial dari elemen massa
dM=
(
ω×r)
dm …(3.16)Momentum angular dH dapat dinyatakan sebagai :
dH=r×
(
ω×r)
dm …(3.17)Tetapi H =
∫
dHmeliputi sejumlah massa dari pesawat sehingga :(
)
dmdH r ω r
H=
∫
=∫
× × …(3.18) Dengan mengevaluasi untuk hasil kali silang, jikaR Q
P j k
i
ω= + +
z y x j k i
r= + + …(3.19) Kemudian perkalian silang antara ωdan r adalah :
ω× r = i(zQ− yR)+j(xR−zP)+k(yP−xQ) …(3.20)
Kemudian
[
+ − −] [
+ + − −]
+= ×
×(ω r) i(y2 z2)P xyQ xzR j(z2 x2)Q yzR xyP r
k
[
(x2 + y2)R−xzP− yzQ]
…(3.21)Dengan mensubstitusikan persamaan 3.21 kedalam persamaan 3.18 maka
[
]
[
]
∫
+ − − +∫
+ − −= (y2 z2)P xyQ xzRdm (z2 x2)Q yzR xyPdm j
i H
didefinisikan serupa. Dengan menggunakan asumsi bahwa Jxy =Jyz =0, persamaan 3.22 dapat juga dituliskan menjadi
xz x
x PI RJ
H = −
y y QI
H =
xz z
z RI PJ
H = − …(3.23)
Akan tetapi persamaan 3.14 menghendaki adanya laju perubahan H terhadap waktu.
Karena H baik besar maupun arahnya maka persamaan 3.14 dapat ditulis menjadi :
H ω
M= + ×
∆
∑
dHdtH
1 …(3.24)
Komponen dari
dt dH H
1 adalah :
x PIx RJxz dt
dH • •
− =
y
y I Q dt dH •
=
xz z
z
J P I R dt
dH • •
−
= …(3.25)
Karena telah diasumsikan bahwa pesawat adalah benda tegar dengan massa
yang konstan, laju perubahan momen terhadap waktu serta hasil kali inersia adalah
nol.maka
ω×H=(iP+jQ+kR)×(Hx +Hy +Hz)
ω×H=i(QHz −RHy)+j(RHx −PHz)+k(PHy −QHx) …(3.26)
∑
∆Mdapat juga ditulis sebagai:Dengan menyamakan komponen-komponen dari persamaan 3.25, 3.26, dan 3.27 dan
mensubstitusikannya untuk Hx,Hy,dan H persamaan gerak angular adalah: z
∑
∆L
= P• Ix −R• Jxz +QR(Iz −Iy)−PQJxz
∑
∆M
=• •
− + −
+ x z xz
y PR I I P R J
I
Q ( ) ( 2 2)
∑
∆N
=R• Iz −PJxz +PQ(Iy•−Ix)+QRJxz
...(3.28) Persamaan untuk gerak linier adalah :
∑
∆Fx =m(U•+WQ−VR)∑
∆Fy =m(V•+UR−WP) )(W VP UQ
m
FZ = + −
∆ •
∑
…(3.29)Persamaan 3.28 dan 3.29 adalah persamaan gerak yang lengkap untuk
menggambarkan gerak pesawat.
Linierisasi pada persamaan gerak 3.28 dan 3.29 dapat dilakukan untuk
menyederhanakan solusi. Keenam persamaan dapat dipecah menjadi dua set dari tiga
persamaan simultan. Untuk menyelesaikannya maka pesawat ditinjau terbang lurus
dan tidak dipercepat dan terdapat gangguan yaitu penyimpangan (defleksi) pada
(rolling) atau menggeleng (yawing) ; lalu P=R=V=0 dan
∑
∆Fy ,∑
∆L
,dan
∑
∆N
pada persamaan dapat dieliminasi sehingga∑
∆Fx =m(U•+WQ) ) (W UQ mFZ = −
∆ •
∑
∑
∆M
=Q• Iy …(3.30)
III.2 Persamaan gerak longitudinal
Komponen dari kecepatan linier dan kecepatan angular terhadap sumbu
pesawat dinotasikan sebagai U, V, W, P, Q, dan R. Suku-suku ini mengandung
harga-harga pada saat kesetimbangan dan perubahan pada keadaan steady state, sehingga
dapat dituliskan sebagai:
w W W
v V V
u U U
+ =
+ =
+ =
0 0
0
r R R
q Q Q
p P P
+ =
+ =
+ =
0 0 0
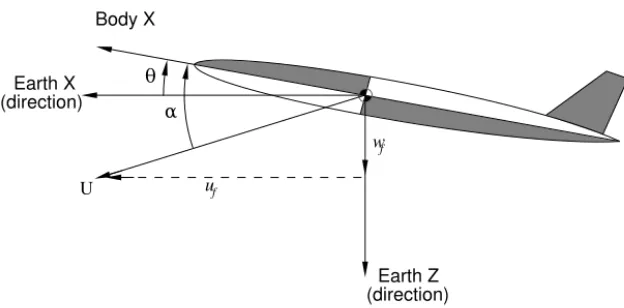
Gambar 3.1.Sumbu kesetimbangan dan gangguan pesawat
Pada gambar 3.1 dapat dilihat bahwa sumbu OX adalah sumbu longitudinal
dari pesawat dan segaris dengan arah vektor kecepatan dari pesawat, W0 =0. Dalam gambar 3.1 sumbu XE,YE,ZE adalah sumbu acuan (referensi) terhadap bumi,
0 , 0 0,Y Z
X , adalah sumbu kesetimbangan pesawat dan X,Y,Zadalah sumbu gangguan pada pesawat. Seperti dapat dilihat pada gambar 3.1 Θ0 dan γ0 diukur dari horizontal
dari sumbu X . 0
Sudut γ adalah sudut jalur penerbangan (flight path angle) dan didefenisikan
sebagai sudut yang diukur pada diantara bidang vertikal dan bidang horizontal dan
Perubahan dari Θadalah θ, perubahan kecepatan sudut yang disebabkan oleh
rotasi terhadap sumbu Y adalah q=θ• , dengan kondisi ini maka U =U0+u, W=w dan
0
U adalah konstan,
• •
=u
U dan W• =w• . Ketika pesawat pada awalnya terbang tanpa mempunyai percepatan maka Q =0 dan Q=q. 0
Dengan mensubstitusikan ini ke persamaan gaya pada persamaan 3.30 maka
∑
∆Fx =m(u•+wq)∑
∆Fz =m(w•−U0q−uq) ...(3.31)Dengan membatasi bahwa perubahan pada keadaan kesetimbangan akibat gangguan
adalah kecil, maka persamaaannya dapat ditulis sebagai :
∑
∆Fx =m(u•)∑
∆Fz =m(w•−U0q) =m(w•−U0θ•)∑
∆M
=θ••Iy …(3.32)
Dengan memperluas dan menerapkan gaya dan momen dan menyatakan
perubahan yang menyebabkan gangguan. Komponen gaya gravitasi sepanjang sumbu
X dan Z adalah fungsi dari sudut Θ, seperti ditunjukkan oleh gambar 3.2
Θ −
= mgsin
F
x
g Θ
=mgcos
F
z
Perubahan gaya ini terhadap Θadalah: Θ − = Θ ∂ ∂ cos mg F x g Θ − = Θ ∂ ∂ sin mg F z g ...(3.34)
Gaya pada arah sumbu X adalah fungsi dari U,W,W•,Θ, dan Θ• lalu total diferensial dari F dapat dituliskan sebagai x
∑
• • • • Θ Θ ∂ ∂ + Θ Θ ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂= dW F d F d
W F dW W F dU U F
dFx x x x x x ...(3.35)
Alasan karena tidak hadirnya suku ∂Fx /∂U• karena pesawat diasumsikan mengalami aliran quasisteady. Karena u,w, dan variabel-variabel lain adalah perubahan parameter
dan gangguan-gangguan dianggap kecil maka persamaan 3.35 dapat dituliskan sebagai
berikut:
∑
• • • • ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∆ θ θ θθx x
x x x x F F w w F w w F u u F
F ...(3.36)
Dengan mengalikan dan membagikan tiap suku dengan U maka persamaan 3.36 0
menjadi
∑
• • • • ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∆ 0 0 0 0 0 0 0 0 0 0 U F U U F U U w w F U U w w F U U u u F UF x x x x x
x
θ θ θ
θ ...(3.37)
Rasio
U w U
u , dan U
w• dan didefenisikan sebagai:
Dengan mensubstitusikannya ke persamaan 3.37 maka akan didapat hasil
∑
• • • • ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∆ θ θ θ θ αα x x x
x x x F F w F w F u u F U
F ' ' ' ...(3.38)
Dimana α α ∂ ∂ = ∂ ∂ = ∂ ∂ = ∂
∂ x x Fx Fx U w F w F U '
/ dan 1
' ≡ ∂ ∂
αα
Maka dari persamaan 3.32 yang menyatakan bahwa :
• • • • = = = = ∆
∑
mU uU u mU U U u m u m
Fx ( ) '
Dengan mensubstitusi pernyataan untuk
∑
∆Fx pada persamaan 3.38, denganmengambil suku disebelah kanan dan membagikannya dengan Sq persamamaan untuk
gaya pada sumbu x menjadi:
Sq F F Sq F Sq F Sq F Sq u u F Sq U u Sq
mU x x x x x = xa
∂ ∂ − ∂ ∂ − ∂ ∂ − ∂ ∂ − ∂ ∂ − • • • • θ θ α α α α 1 1 1 ' 1 '
' ...(3.39)
Dimana a
x
F adalah gaya aerodinamika yang berasal dari sumbu x. S adalah luas
sayap, q= 2 2 1
V
ρ tekanan dinamik danρ adalah massa jenis udara.
Substitusi untuk ∂Fx∂θ dari persamaan 3.33 dan mengalikan serta membagikan suku keempat dan kelima dari persamaan 3.39 dengan c/2U , dimana c
adalah panjang busur aerodinamik maka persamaan 3.39 menjadi:
+ Θ − ∂ ∂ − ∂ ∂ − ∂ ∂ − • • • θ α α α
α ' (cos )
2 1 2 ' 1 ' ' Sq mg F c U Sq U c F Sq u u F Sq U u Sq
mU x x x
a x a F x x C Sq F F c U Sq U c = = ∂ ∂ • • θ θ 2 1
Kadang-kadang
Sq mg
disimbolkan sebagai -C sehingga persamaan 3.40 w
menjadi − Θ + − − − • • • α θ α α
α' 2 ' (cos )
'
' x x Cx Cw
U c C u C u Sq mU
u Cxq CFxa
U c
=
•
θ
2 …(3.41)
Biasanya F dan z
M
dapat diselesaikan. Pernyataan untuk F dinyatakan zdalam bentuk sebagai berikut:
• • • • ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∆ θ θ θ
θz z
z z z z F F w w F w w F u u F F …(3.42)
Dengan mengalikan dan membagikan setiap suku dengan U dan menggunakan
defenisi dari rasio yang telah didefenisikan sebelumnya maka persamaan 3.42 dapat
dituliskan menjadi :
• • • • ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∆
∑
θ θ θ θ α α ααz z z z
z z F F F F u u F U F ' …(3.43)
Dari persamaan 3.32
∑
∆Fz =m(w•−Uθ•)∑
∆ = • U −Uθ• =mU α•−mUθ•U w m
Fz ( ) ' ...(3.44)
Substitusi persamaan 3.44 ke persamaan 3.43 dan mengalikannnya dengan Sq akan
menghasilkan :
Dengan menggunakan koefisien yang terdapat pada tabel L.1 (terdapat pada lampiran)
maka persamaan 3.45 menjadi :
a z q
u z z z w F
x C C C
U c Sq mU C C U c Sq mU u
C − Θ =
− − + − − + − • α• α α θ• θ α ) (sin 2 ' ' 2 ' ...(3.46)
Persamaan untuk moment dapat dituliskan sebagai:
∑
∆M
= • • • •∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ θ θ M M M M w w w w u
u … (3.47)
Dengan mengalikan dan membagi tiga dari suku pertama dengan U dan
menggunakan defenisi yang telah ditetapkan sebelumnya maka persamaan 3.47 dapat
dituliskan kembali sebagai:
a m y C Sqc Sqc Sqc I Sqc Sqc u u Sqc u = = ∂ ∂ − + ∂ ∂ − ∂ ∂ − ∂ ∂
− M M• • M •• M• • Ma
θ θ θ α α α α 1 ' 1 1 ' ...(3.48)
Dengan menggunakan koefisien yang terdapat pada table L.1 maka persamaan 3.48
menjadi :
a q
u m m
y m
m
m C C
U c Sqc I C C U c u
C − − + − =
− • α• α α θ•• θ•
α 2
' '
2
' ...(3.49)
Persamaan 3.41, 3.46 dan 3.49 adalah persamaan untuk gerak longitudinal pada
a Fx w xq X x
xu C C C
U c C C U c u C u Sq mU = − − Θ + − − + •− • • θ θ α α α
α (cos )
2 ' ' 2 ' ' α θ θ α α α
α z zq w Fz
zs
zu C C C
U c Sq mU C C U c Sq mU U
C =
Θ − − − + − − +
− • • • (sin )
2 ' ' 2 ) ' (
(
)
− + − − + − • α• α α θ•• θ• α q u m y m m m C U c Sqc I C C U c u C 2 ' ' 2 ' = a mC
...(3.40)
Persamaan ini mengasumsikan bahwa :
1. Sumbu X dan Z terletak pada bidang simetris dan ttitik asal sumbu sistem
terletak pusat berat dari pesawat (dapat dilihat pada gambar 3.2)
2. Massa pesawat adalah konstan
3. Pesawat adalah benda tegar
4. Bumi adalah kerangka acuan inersial
5. Gangguan pada pesawat dianggap kecil
6. Aliran udara adalah quasisteady
Dengan mentransformasikan persamaan 3.40 ke transformasi laplace maka persamaan
3.40 serta dengan mengabaikan suku-suku
• α x C , q x
C , dan u
m
C persamaan tersebut
akan menjadi :
0 = Θ − −
− ' ( ) ' ( ) (cos ) ( ) s C s C s u C s Sq mU w x
xu α α θ
( )
02
2 =
Θ − − − + − − +
− ' ( ) • ' C s C (sin ) (s)
U c Sq mU s C s C U c Sq mU s u
Cz z z z w
q
u α α θ
Gambar 3.2.Gerak Longitudinal Pesawat
III.3 Permodelan dan penurunan fungsi alih
Data fisik pesawat F-16 yang mendukung analisa gerak longitudinal adalah :
Massa pesawat (m) = 9295.4 kg
Panjang sayap pesawat (B) = 9.144 m
Luas Sayap (S) = 27.87 m 2
Busur aerodinamik rata-rata ( c ) = 3.45 m
Momen inersia gerak mengguling
(roll) (I ) x = 12874.8 kg.m2 Momen inersia ketinggian (pitch)
(Iy) = 75673.6 kg.m2
Momen inersia gerak menggeleng
(yaw) (I ) z = 85552.1kg.m2 Produk momen inersia (Ixz) = 1331.4 Produk momen inersia (Ixy) = 0.0
Lokasi pusat titik berat pesawat
(xcg) = 1.035 m
Kecepatan Jelajah Pesawat (U) = 1.2 Mach
Data Fisik pesawat berasal dari (Sonneveldt,Lars, Non-linier F-16 description ,Delft
University) .
F-16 beroperasi pada range ketinggian 9000-12000 m dan memiliki kecepatan
maksimum 2.2 mach (2.2 kecepatan suara) (sumber; penelitian ini, diasumsikan bahwa pesawat beroperasi pada ketinggian 10.000 m
dengan kecepatan jelajah 1.2 mach. untuk itu maka diperlukan menggunakan data
atmosfer data ini bersumber dari "Sonneveldt,Lars, Non-linier F-16 description ,Delft
University".
Data Atmosfer :
h T
T = 0 −0.0065
h T g e 28705 0 .
− =ρ ρ
T
a= 1.4×287.05 ...(3.42) Dengan :
3 0 =1.225kg/m
ρ (massa jenis udara pada permukaan air laut)
K
T0 =288.15 (Suhu Udara pada permukaan laut)
h< 11000 m
a= kecepatan suara
h T g e 28705 0 .
− =ρ ρ
= 1.225
000 10 15 223 05 287
8 9
. ) . ( .
.
− e
= 0.265275 kg/m3
T a= 1.4×287.05
= 1.4×287.05(223.15) = 299.46 m/s
Dengan demikian kecepatan pesawat adalah :
U = 1.2(299.46)
= 359.352 m/s
Koefisien-koefisien aerodinamika dari pesawat adalah :
Cxu =
-
0.12a
x
C = -2.3163
w
C = 0.33
u
z
C =-0.66
c It
= 2.89
•
α
Z
C = 0.04
α
z
C =0.4
q z
C = -9.28
•
α
m
C = 0.0327
q m
C =-7.051 Cmα=-0.0448
2
2 1
= 0265275 359352 2 2 1 ) . ( .
= 17128 kg/ms2
08762 12. = Sq mU 0002 0 2U CZα• = .
c
045 0 2U Czq =− .
c • α m C U c 2 =0.00015697 0337 0 2 Cmq =− .
U c 04594 0. = Sqc Iy
Koefisien-koefisien aerodinamika diatas didapatkan berdasarkan data fisik dari
pesawat.
− − Θ =0
s−C 'u(s) C ' (s) C (cos ) (s) Sq
mU
w x
xu α α θ
( )
02
2 =
Θ − − − + − − +
− ' ( ) • ' C s C (sin ) (s)
U c Sq mU s C s C U c Sq mU s u
Cz z z z w
q
u α α θ
α
( )
( )
02 ' 2 2 = − + −
• U C s s
c s Sqc I s C s C U c q m y m
m α α θ
α
(12.08762s+0.12)'u(s) + 2.3163'α(s) - 0.33 θ(s)=0 )
( ' .66u s
0
− + (12.08742s-0.04)'α(s)-12.04262sθ(s) = 0
0+(0.00015697s+0.048)'α(s)+(0,046s +0.0337s)2 θ(s)=0 ...(3.43)
Persamaan 3.43 adalah persamaan linier simultan yang mempunyai variabel-variabel
sehingga persamaan 3.43 dapat ditulis dalam bentuk matriks, determinan dari matriks
tersebut harus sama dengan nol.
0 ) 0337 . 0 046 . 0 ( ) 0048 . 0 00015697 . 0 ( 0 04262 . 12 ) 04 . 0 08742 . 12 ( 66 . 0 33 . 0 31613 . 2 ) 12 . 0 08762 . 12 ( 2 = + + − − − − + = ∇ s s s s s s ...(3.44)
Determinan dari matriks pada persamaan 3.44 dapat dicari dengan aturan Crammer,
yaitu:
(
+)(
{
−)
+ − − +}
−=
∇ 12.08762s 0.12 12.08742s 0.04(0.046s2 0.0337s) ( 12.04262)(0.00015697s 0.048)
(
)
{
0.66(0.046 0.0337 )}
(
0.33) (
{
0.66)
(0.00015697 0.048)}
0 )3663 . 2
( − s2 + s + − − s+ = ...(3.45)
0 105 . 0 583 . 0 089 . 7 997 . 4 72072 .
6 4 + 3+ 2 + + =
=
∇ s s s s ...(3.46)
dengan membagikan persamaan 3.46 maka dengan 6.72072 maka akan didapat :
015623 . 0 08675 . 0 055 . 1 744 .
0 3 2
4+ + + +
=
∇ s s s s ...(3.47)
Dengan menyusun kembali akar-akar persamaan tersebut maka akan didapat
dua bentuk kuadratis dari persamaan 3.47 yaitu:
Akan tetapi bentuk kuadratik untuk mengindikasikan frekuensi natural ωndan rasio
redaman ζ adalah (s2 +2ζωns+ωn2) dengan menggunakan defenisi ini pada persamaan 3.48 menjadi :
(s2+2ζsωnss+ωns2)(s2+2ζsωnps+ωnp2 ) ...(3.49) dengan
= p
ζ koefisien redaman phogoid =
s
ζ koefisien redaman osilasi periode pendek (short-period oscillation) =
ns
ω frekuensi natural osilasi periode pendek
=
np
ω frekuensi natural phugiod
Dari persamaan diatas maka dapat dilihat bahwa :
=
s
ζ 0.994 =
ns
ω 0.334
= p
ζ 0.126
=
np
koefisien-koefisien tersebut adalah untuk e m
C δ =-0.2094 dan untuk e z
C δ =-0.0725 dan
e
x
C δ diabaikan. Dengan menggunakan persamaan 3.43 dan mensubstitusi
harga-harga koefisien dari e m
C δ dan e z
C δ maka akan didapatkan
(12.08762s+0.12)'u(s) + 2.3163'α(s) - 0.33 θ(s)=0 )
( ' .66u s
0
− + (12.08742s-0.04)'α(s)-12.04262sθ(s) = -0.0725δe(s)
(0.00015697s+0.048)'α(s)+(0,046s + 0.0337s)2 θ(s) =-0.2094 δe(s) ...(3.50)
dengan δe adalah defleksi dari elevator yang dinyatakan dalam radian.
Fungsi transfer dinamik dari kontrol kecepatan dari persamaan diatas dengan
e
δ sebagai input dan 'u(s) sebagai output didapat dengan menggunakan metode determinan yaitu :
∇ + + − − − − −
= s s s
s s s s u e 0337 . 0 046 . 0 048 . 0 00015697 . 0 2094 . 0 04262 . 12 04 . 0 08742 . 12 0725 . 0 33 . 0 3163 . 2 0 ) ( ) ( ' 2
δ ...(3.51)
dengan∇ adalah determinan dari matriks persamaan 3.44 dan hasilnya diberikan oleh
persamaan 3.46.
∇=6.72072
(
s2+0.6634s+0.9878)(
s2+0.0772s+0.01582)
...(3.52)) 01582 . 0 0772 . 0 )( 9878 . 0 6634 . 0 ( 72072 . 6 ) 24 . 1 86 . 864 ( 00774 . 0 ) ( ) ( ' 2 2 2 + + + + + − = s s s s s s s s u e
δ ...(3.53)
atau dapat juga dituliskan sebagai :
) 01582 . 0 0772 . 0 )( 9878 . 0 6634 . 0 ( ) 0014 . 0 )( 86 . 864 ( 001152 . 0 ) ( ) ( ' 2
2 + + + +
− − = s s s s s s s s u e
δ ...(3.54)
Fungsi alih dinamik untuk kontrol sudut serang dengan fungsi masukan adalah
defleksi elevator adalah :
∇ + − − − − − +
= s s
s s s s e 037 . 0 096 . 0 2094 . 0 0 04262 . 12 0725 . 0 66 . 0 33 . 0 0 12 . 0 08762 . 12 ) ( ) ( ' 2
δα ...(3.55)
) 01582 . 0 0772 . 0 )( 9878 . 0 6634 . 0 ( ) 00845 . 0 184 . 0 )( 0793 . 362 ( 08413 . 0 ) ( ) ( ' 2 2 2 + + + + + + + − = s s s s s s s s s e
δα ...(3.56)
Untuk masukan δe dan keluaran θ maka fungsi alihnya adalah :
∇ − + − − − +
= 0 0.00015697 0.048 0.2094
0725 . 0 04 . 0 08742 . 12 66 . 0 0 31613 . 2 12 . 0 08762 . 12 ) ( ) ( s s s s s e
δθ ...(3.57)
) 01582 . 0 0772 . 0 )( 9878 . 0 6634 . 0 ( ) 1290 . 0 )( 1240 . 0 ( 58 . 4 ) ( ) ( 2
2 + + + +
+ − − = s s s s s s s s e
III.4.1.Pendekatan Osilasi Periode Pendek (Short – Period Approximation).
Pendekatan periode osilasi pendek digunakan dengan mengasumsikan
kecepatan pesawat konstan sehingga 'u = 0 pada persamaan gerak. Persamaan gerak
yang mengarah pada sumbu X dapat diabaikan karena tidak memiliki kontribusi yang
berarti pada osilasi periode pendek (short-period oscillation), karena gaya pada
sumbu X mempengaruhi laju dari pesawat. Dengan asumsi ini dan mengabaikan
• α z C dan q z
C dan menyisipkan nilai-nilai dari e m
C δ dan e z
C δ maka persamaan 3.41
menjadi :
( )
(sin ) ( ) 0'
2 =
− Θ − + −
− • s C s
Sq mU s C s C U c Sq mU w z
z α α θ
α
( )
( )
02 ' 2 2 = − + −
• U C s s
c s Sqc I s C s C U c q m y m
m α α θ
α
...(3.59)
lalu dengan menganggap Θ=0 dan menuliskan persamaan 3.59 ke dalam bentuk
matriks maka persamaan tersebut akan menjadi :