KAJIAN NUMERIK RESPON GERAKAN
KAPAL FPSOIFSO
SAAT DITAMBAT (MOORED FPSOIFSO)
Sahlan, Aritin, Wibowo H.N Tim Kegiatan PKPP 18 KRT 2012
UPT Balai Pengkajian dan Penelitian Hidrodinamika
-
BPPT E-mail: [email protected]Abstract
A Floating Production Storage and Offloading(FPS0) dan Floating Storage and Offloading (FSO) structures were operated as production and storage facility of crude oil resulting from oil and gas exploration activities. In the design stages, FPSO performances that will be operated should be deeply analyzed. The moored FSO by using a mooring hawser was analyzed
in
order to determine a ship performance and mooring system stability will be applied. A numerically method was used to predict amount of motion response and acceleration when the ship was moored. The7
correlated environmental wave condition was Hs=4.42m and Tp=lO seconds. Some significant stages should be done to obtain value of motion response. A nurnerlcally output was shown that significant motion and acceleration responses, especially in surge, heave, roll and pitch modes, at some heading angle of ship was not so high. Maximum tension of mooring hawser that was occured was under a breaking strength of mooring hawser matter.
Kata kunci: FPSO, FSO, mooring hawser, numerical method, motion, acceleration, tension
I. PENDAHULUAN akan mengakibatkan gerakan kapal yang
Salah satu sumber energi yang cukup besar pemanfaatannya hingga saat ini adalah bahan bakar fosil yang berasal dari perut bumi yang terletak di dasar lautan. Kegiatan eksplorasi dilakukan dengan jalan memompa bahan bakar tersebut dari dasar laut menuju kapal yang berfungsi sebagai sarana produksi dan penyimpanan migas (FPSO) ataupun sarana penyimpanan yang bersifat sementara saja (FSO). Selanjutnya minyak mentah tersebut dipisah-pisahkan menjadi minyak, gas, air dan pasir, dimana material yang dianggap tidak diperiukan akan dikembalikan ke laut. Gas yang diperoleh dapat dimanfaatkan sebagai sumber energi di kapallplatform, sedangkan air dapat diinjeksikan ke reservoir untuk meningkatkan produksi minyak mentah. Pada akhirnya, minyak mentah dapat dialirkan menuju tangki-tangki penyimpanan yang nantinya akan dikirim ke darat menggunakan
shuttle tanker. Dalam tahap
pengoperasiannya, FPSOIFSO akan mendapatkan pembebanan dari kondisi lingkungannya yang berupa beban gelombang, arus dan angin. Beban-beban tersebut terkadang dalam kondisi yang cukup ekstrim
berlebihan maupun tegangan-tegangan pada sistem tambat yang agak berlebihan. Hal ini sudah barang tentu akan berakibat menurunnya aktivitas produksi maupun bongkar muat migas pada kapal FSO, atau bahkan dapat membahayakan ABK yang bekerja di atas kapal tersebut serta menyebabkan terjadinya kegagalan pada sistem tambat kapal maupun buoy tambat.
Kapal FPSOIFSO yang berukuran besar dapat menghasilkan beban dinamis yang tinggi pada tali tambat, diiringi beban siklis dari tarik selama gerakan kapal tersebut membuat tali tambat dapat lelah dalam waktu yang pendek. Penyebab dari gerakan yang berlebihan tidak hanya berasal dari besamya gaya yang bekerja pada kapal tetapi juga karena komponen siklis dari gaya
-
gaya tersebut. Untuk mengurangi resiko putusnya tali tambat karena gerakan dari kapal yang berlebih tersebut sangat diperlukan respon cepat dari alat yang ada pada kapal FPSOIFSO untuk melepas tali tambat yang menghubung ke Export Tanker yang sedang ditambat untuk proses bongkar muat minyak atau gas. Kondisi saat ini di lapangan rnenunjukkan bahwa saat tali tambat (mooring hawser) menerima bebanmaksimun sensor monitoring yang ada akan rnengirim respon ke sistem kontrol elektronik yang ada di ruang kontrol dan pada beban tertentu alarm akan berbunyi ha1 ini menandakan mooring hawser menerima beban yang tidak diijinkan sehingga crew yang bersiaga pada kapal FPSOIFSO akan segera menekan tombol pada alat pelepas mooring hawser (Quick Releace Hook) sehingga Export Tanker yang sedang tambat pada kapal FPSOIFSO akan terlepas dan dibawa ke zona yang aman. Dengan kondisi ini tentunya bisa terhindar dari kemungkinan putusnya tali tambat. Permasalahan yang ada saat ini adalah begitu kapal menerima beban dari gelombang dan angin yang sangat ekstrim dan responnya ke tali tambat sangat cepat sekali bahkan hanya ukuran beberapa menit saja tentunya harus diimbangi respon cepat juga dari alat pelepas tali tambat sehingga tentunya dapat terhindar dari kemungkinan putusnya tali tambat. Pemecahan masalah yang ada adalah merubah kinerja dari sistem pelepas tali tambat semi otomatis ke sistem otomatis dimana apabila tali tambat menerima beban lebih sensor stress monitoring akan mengirim respon ke sistem kontrol elektronik kemudian dari sistem kontrol elektronik akan rnengirim respon ke motor penggerak sistem mekanis untuk melepas tali tambat yang tertambat pada kapal FPSOIFSO. Solusi dari ha1 diatas tentunya adalah memperbaiki kinerja dari sistem tambat yang ada sekarang menjadi sistern tambat otomatis
Kegagalan pada sistem tambat kapal (mooring hawser) terjadi bilamana tegangan maksimum yang terjadi pada sistem tambat kapal melebihi ambang batas atas dari kekuatan tali tambat yang digunakan. Oleh karenanya, diperlukan adanya inovasi suatu sistem tambat otomatis yang dapat merespon beban tali tambat ke sistem mekanis pelepas tali jambat (Quick Releace Hook) dengan cepat dan aman, sehingga tegangan tali tambat (mooring hawser) yang berlebihan tidak terjadi. Salah satu langkah desain agar sistem rnekanis pelepas tambat otomatis kapal FPSOIFSO bisa bekerja secara efektif maka diperlukan kajian numerik awal untuk memprediksi besarnya Respon gerakan kapal (RAO) dan tegangan tali tambat kapal (mooring hawser), tegangan hoses maupun tegangan tali tambat (mooring lines). Simulasi numerik ini dilakukan secara bertahap dengan memanfaatkan beberapa program aplikasi seperti SHIPMO, MOSES, ORCAFLEX dll.
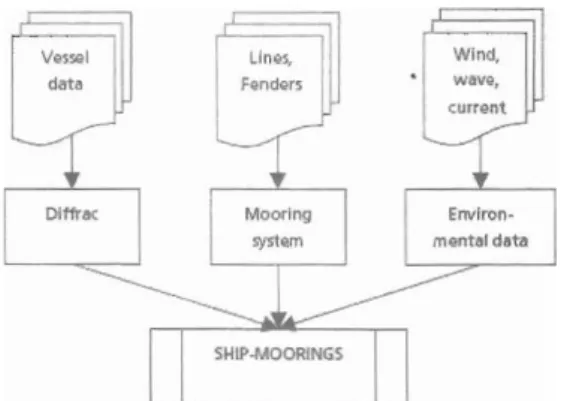
Program tersebut di atas membutuhkan masukan table offset badan kapal, koefisien-
koetisien hidrodinamika, data sistem tambat, data lingkungan yang dapat digambarkan secara skernatis(" sebagaimana Gambar 1 di bawah ini. Berdasarkan keluaran program di atas sehingga dapat ditentukan besarnya kapasitas sistern otomatis "Quick Release Hook" yang akan diaplikasikan pada kapal FPSOIFSO yang melakukan aktifitas bongkar muat dalam kondisi operasionalnya tanpa mengalami kegagalan sistem tarnbat karena tegangan yang berlebihan saat terjadi zona gelombang tidak arnan .
Gambar 1. Skema input data
Adapun tujuan utama dari penelitian ini adalah mengembangkan suatu sistem tambat untuk memperbaiki kinerja yang dilengkapi dengan sistem kontroi otomatis untuk keselamatan operasional bongkar muat minyak atau gas dan dapat dipakai pada kapal FPSOIFSO saat melakukan bongkar muat minyak atau gas di dermaga atau platform terapung dengan cara melepas tali tambat secara otomatis untuk menghindari gerakan yang berlebih dari kapal atau putusnya tali tarnbat.
2. BAHAN DAN METODOLOGI
Penelitian d'lakukan dengan menggunakan metode gabungan antara survey data lapanga? da- simulasi numerik.
S u v ' data dilakukan pada beberapa stake-"ter yang terkait dengan penelitian ini
! a - : -5 3uti operator pengguna FPSO yang
!c-.
-
a:as PT. Duta Marin dan PT. Berlian-2: 2 'anker yang berlokasi di Jakarta. Selain
-
cengumpulan data lapangan juga r ?%:.a1 dengan bekerja sama denganpenelitian dan pengembangan milik
m€ d a pe pe' ter dam iinr din tan nur Da! sell per t a r Pad
pemerintah daerah khususnya seluruh instansi terkait Pemerintah Propinsi Kalimantan Timur yang mempunyai potensi eksplorasi migas cukup besar sebagaimana ditunjukkan oleh Gambar 2 berikut.
Gambar 2. Propinsi Kalimantan Timur
B. Pengambilan Data
Pengambilan data dilakukan dengan cara wawancara dan diskusi langsung dengan pihak pengguna FPSO untuk mengetahui ukuran kapal FSO, daerah operasinalnya dan
permasalahan-permasalahan yang dihadapi selama mengoperasikan FPSO tersebut.
Data-data FPSO maupun shuffle tanker meliputi data ukuran utama kapal, sedangkan data lingkungan terdiri atas kedalaman perairan, kecepatan angin dan arus, tinggi dan periode gelombang laut. Adapun data yang terkait dengan system tambat meliputi jenis dan dimensi buoy, jenis dan jumlah mooring line, panjang dan spesifikasi tali tambat, dimensi dan spesifikasi mooring hawser.
Selain itu, gambar-gambar FPSO, Shuffle tanker, buoy yang diperlukan untuk pemodelan numerik juga diperoleh dari pihak pengguna. C. Pemrosesan Data
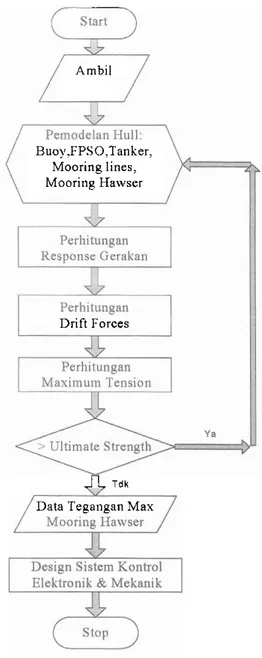
Data dan gambar FPSO yang diperoleh selanjutnya digunakan sebagai dasar dalam perencanaan sistem mekanik pelepas sistem tambat otomatis sebagaimana digambarkan
pada diagram alir berikut..
Arnbil Buay.FPSO.Tanker, Mooring lines, Mooring Hawser Drift Forces
n
TdkData Tegnngan Max
Gambar 3. Diagram Alir Penelitian
D. Mefode Yang Digunakan
Dalam penelitian ini pemodelan numerik dilakukan berdasarkan persamaan gerakan kapal. Adapun metodologi yang digunakan dalam penelitian ini yaitu dengan menyelesaikan persamaan gerakan kapai saat ditambat melalui metoda numerik.
Dengan berkembangnya metode komputasi dan murahnya peralatan komputer maka dalam beberapa tahun belakangan ini, metode numerik menjadi pilihan yang handal untuk memprediksi kinerja kapal yang ditambat. Prediksi kinerja dan beban sistem tambat dengan menggunakan model matematika biasanya didasarkan atas beberapa asumsi untuk memudahkan tahapan perhitungan.
Gaya-gaya hidrodinamika orde pertama pada kapal yang ditambat pada gelombang regular dapat dihitung dengan metode singularitas berdasarkan aliran potensial 3 dimensi. Gelombang datang diasumsikan mengalami difraksi di kapal, mengarah pada potensial gelombang difraksi yang terbentuk atas potensial gelombang dan gelombang radiasi yang disebabkan oleh gerakan kapal. Gaya-gaya hidrodinamika diperoleh dengan menjumlahkan seluruh gaya yang diakibatkan oleh potensial gelombang datang, radiasi dan difraksi. Perhitungan yang dilakukan dengan menggunakan bagian-bagian amplitude gelombang pada frekuensi gelombang yang berbeda akan menghasilkan transfer funcfion. Gaya-gaya drift akibat gelombang nilainya cukup kecil sebanding terhadap kuadrat tinggi gelornbang. Secara umum, ada 2 metode pendekatan untuk menentukan gaya-gaya drifl pada gelornbang regular yaitu metode pendekatan far field dan near field. Metode far field mendapatkan gaya drit melalui hukum kekekalan energi atau momentum fluida. Adapun metode near field menghitung gaya drift melalui penjumlahan secara langsung terhadap tekanan fluida pada permukaan basah kapal.
Dalam kaitannya dengan penentuan tegangan maksimum yang terjadi pada sistem tambat, maka perlu diketahui perilaku gerakan surge kapal secara m e n y e l u ~ h . Diasumsikan bahwa karakteristik gaya kekakuan kapal secara keseluruhan untuk mode gerakan surge adalah linear. Dengan mengasumasikan respon gerakan surge pada frekuensi rendah dapat dipisahkan dari moda gerakan lainnya, persamaan gerakan surge dapat dituliskan dalam bentuk linear dengan koefisien-koefisien konstan. Dengan demikian maka dimungkinkan untuk dilakukan analisa dalam domain frekuensi dengan menggunakan spectral gaya-gaya drift. Secara umum, persafbaan gerakan kapal untuk permasalahan ini dapat dituliskan sebagai berikut :
dimana :
m : massa kapal FPSOIFSO a : massa tambah hidrodinamis b : koefisien damping
C : konstanta gaya kekakuan f : gaya drift yang bekerja pada
FPSOIFSO
Massa tambah hidrodinamis dapat diasumsikan sebesar 15% massa kapal, sedangkan koefisien damping bisa diasu msikan 1.2% critical damping. Critical damping, b, merupakan fungsi koefisien gaya kekakuan yang dapat diperoleh dari persamaan berikut.
Dalam pemodelan numerik sistern tambat dengan program Orcaflex, perlu dilakukan beberapa tahapan pemodelan sebagai berikut:
- Pemodeian vertices badan kapal FPSOIFSO . . - . . . . -
-
Input data RAO, added mass, damping, QTF-
Pemodelan mooring hawser, mooring hoses-
Pemodelan vertices SBM- Pemodelan environment operasional kapal
Sebagai studi kasus maka dilakukan pemodelan numerik terhadap kapal FSO sebagaimana terlihat pada Gambar 2 berikut. Kapal ini mempunyai ukuran utama dengan panjang (L) 180m, lebar (B) 46m, tinggi (H) 27m, serta diameter single buoy mooring (SBM) 5 m dan tinggi 2.6 m.
Gambar4. Pemodelan Numerik Sistem Tambat
3. HASlL DAN PEMBAHASAN
Berdasarkan hasil keluaran program yang digunakan untuk perhitungan nurnerik model sistem tambat kapal Floating, Storage & Offloading (FSO) dengan Single Buoy Mooring (SBM) diperoleh data Response Amplitude Operator (RAO) dalam berbagai sudut heading, sebagai fungsi frekuensi sebagaimana ditunjukkan dalam gambar berikut.
PLOAmG STORAGE OIL MOORED AT SRM RAO SURGE
FLOATING STORAGE OIL MOORED AT SBM RAO H E A W
FLOATING STORAGE OIL MOORED AT SB31 RAOROLL
FLOATING STORAGE OIL MOORED AT SBM RAO PITCH
Gambar 5. Perbandingan Respon Gerakan FSO pada Beberapa Sudut Heading Salah satu parameter yang dapat digunakan untuk menilai kinerja FSO adalah besaran gerakan signifikan dan percepatan signifikan yang terjadi akibat beban gelombang, arus dan angin yang bekerja pada FSO, sebagaimana ditarnpilkan pada table 1 dan 2 sebagai berikut.
Tabel 1 .Gerakan Signifikan FSO 4. KESIMPULAN'
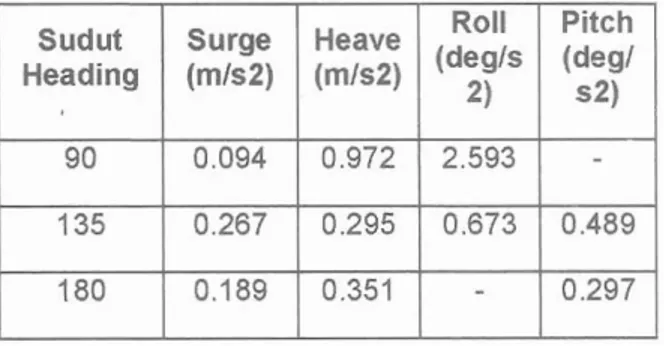
Tabel 2.Percepatan signifikan FSO
Dari Tabel diatas terlihat bahwa gerakan heave FSO terbesar yang terjadi akibat gelombang dengan tinggi gelombang signifikan, Hs=4.42m dan Tp=lO detik adalah 2.816m pada sudut heading 90 derajat, roll terbesar 8.861 derajat pada sudut heading 90 derajat dan gerakan pitch terbesar 1.586111 pada sudut heading 135 derajat. Adapun percepatan gerakan terbesar terjadi untuk gerakan rolling pada sudut heading 90 derajat yaitu 2.593 degIs2.
Dari simulasi numerik pada beberapa sudut heading diperoleh keluaran berupa tension maximum yang terjadi pada mooring hawser sebagaimana ditunjukkan oleh table 3 berikut. Tabel 3. Maximum Tension Mooring Hawser
Pitch (deg) 1.586 0.989 Sudut Heading 90 135 180 Sudut Headin 180 2763
Besaran tension maksimum tersebut selanjutnya dibandingkan dengan batas kekuatan mooring hawser tersebut yaitu sebesar 17070 kN. Jelaslah bahwa tegangan tersebut masih berada dalam batas aman karena masih jauh dibawah batas tegangan putusnya. Surge (m) 0.001 0.312 0.298
Dalam kajian Floating Storage and Omoading (FSO) yang ditambat pada Single Buoy Mooring (SBM) perlu dilakukan prediksi numerik perilaku FSO dan tegangan hawser guna menilai kinerja FSO dan sistem tambat yang digunakan.
Dari kajian numerik yang dilakukan diketahui bahwa besarnya respon gerakan yang terjadi cukup kecil. Hal tersebut terlihat dari besaran gerakan dan percepatan signifikan mode gerakan surge, heave, roll dan pitch dalam berbagai sudut heading yang kesemuanya menunjukkan besaran dalam batas aman untuk kenyamanan, kelayakan dan keselamatan operasionalnya.
Heave (m) 2.816 0.876 0.934
Demikian halnya dengan besarnya tegangan pada mooring hawser yang menghubungkan FSO dan SBM, juga menunjukkan besaran yang berada dalam batas aman operasionalnya.
Roll (deg) 8.861 2.417
DAFTAR PUSTAKA
Alkyon (2003), "Ship Mooring Validation Documents", Alkyon Document, Netherland.
Bhattacharya, R," Dynamics o f Marine Vehicles': John Wley &Sons lnc(1978). Reddy D.V and Arockiasamy, M," OFFSHORE
STRUCTURE Vol I & /I", Krieger Publishing Company, Malabar, Florida, 1991.
Schellin and Ostergaard (1993), "Mooring Problems", Journal of Marine Structure. www.orcina.com , "OrcaFlex Manual