RANCANG BANGUN
SISTEM AUTONOMOUS PADA ROBOT BERODA
DENGAN GLOBAL POSITIONING SYSTEM (GPS)
Zakharia Anugrah Gumilar1, Djogi Lubis2
Jurusan Teknik Elektro, Fakultas Teknik dan Ilmu Kelautan, Universitas Hang Tuah Surabaya Jl. Arief Rachman Hakim no 105, Sukolilo, Surabaya 60111, Jawa Timur
Email : [email protected]
Abstrak: Robot adalah seperangkat alat mekanik yang bisa melakukan tugas fisik, baik dengan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). Robot juga terbagi menjadi beberapa kategori, berdasarkan cara robot bergerak robot menjadi 2 macam yaitu wheeled robot dan legged robot. GPS (Global Positioning System) dapat mengetahui letak suatu benda di seluruh permukaan bumi, selama terdapat sinyal GPS di daerah tersebut. Saat ini satelit GPS telah dibuka untuk umum dan tidak dipungut biaya. Sehingga sangat dirugikan apabila kita tidak memanfaatkan teknologi ini. Oleh karena itu, pada penelitian ini dikembangkan robot beroda yang dilengkapi dengan GPS. Robot beroda tersebut terdiri dari GPS, sensor ultrasonik, Driver motor, Motor DC, keypad, dan Arduino Mega sebagai pengontrolnya. Kita dapat menentukan koordinat tujuan robot dengan keypad kemudian robot akan bergerak menuju koordinat tersebut berdasarkan data dari GPS. Sensor Ultrasonik berfungsi sebagai pendeteksi halangan yang mungkin akan dilewati robot, sehingga robot dapat menghindari halangan tersebut dan menuju koordinat yang ditentukkan. Dari penelitian yang dilakukan, robot beroda dapat mencapai tujuan dengan toleransi ± 2,5 meter. Hasil dari penelitian ini akan diterapkan pada kapal tanpa awak untuk penelitian selanjutnya. Kata kunci: GPS(Global Positioning System), robot beroda, ultrasonik, autonomous. Abstract: A robot is a set of mechanical devices that can perform physical tasks, either by human control or using pre-defined programs (artificial intelligence). Robots are also divided into several categories, based on how robots move, wheeled robots and legged robots. GPS (Global Positioning System) can know the location of an object on the entire surface of the earth, as long as there is a GPS signal in the area. GPS satellites are currently open to the public and are free of charge. This is a loss if we do not take advantage of this technology. Therefore, in this study developed a wheeled robot equipped with GPS. The wheeled robot consists of GPS, ultrasonic sensor, motor driver, DC Motor, keypad, and Arduino Mega as it’s controller. We can determine the coordinates of the purpose of the robot with the keypad and then the robot will move towards the coordinates are based on data from GPS. Ultrasonic sensors function as a detector of obstacles that robots may pass, so the robot can avoid these obstacles and towards the coordinates that are formed. From research conducted, wheeled robots can achieve the goal with a tolerance of ± 2.5 meters. The results of this study will be applied to unmanned vessels for further research.
Key words: GPS (Global Positioning System), wheeled robot , ultrasonic, autonomous.
PENDAHULUAN
Robot adalah seperangkat alat mekanik yang bisa melakukan tugas fisik, baik dengan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). Istilah robot berawal bahasa Ceko “robota” yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan. Robot biasanya digunakan untuk tugas
yang berat, berbahaya, pekerjaan yang berulang dan kotor. Robot juga terbagi menjadi beberapa kategori, berdasarkan cara robot bergerak robot menjadi 2 macam yaitu wheeled robot dan legged robot (Nugroho, 2009).
GPS (Global Positioning System) adalah sistem satelit navigasi dan penentuan posisi yang dimiliki dan dikelola oleh Amerika Serikat. Sistem ini didesain untuk memberikan posisi dan kecepatan tiga dimensi serta informasi mengenai waktu, secara kontinyu di seluruh dunia tanpa bergantung waktu dan cuaca, bagi banyak orang secara simultan. Saat ini GPS sudah banyak digunakan orang di seluruh dunia dalam berbagai bidang aplikasi yang menuntut informasi tentang posisi, kecepatan, percepatan ataupun waktu yang teliti. GPS dapat memberikan informasi posisi dengan ketelitian bervariasi dari beberapa millimeter (orde nol) sampai dengan puluhan meter. Hingga saat ini GPS merupakan sistem satelit navigasi yang paling populer dan paling banyak diaplikasikan di dunia, baik di darat, laut, udara, maupun angkasa. Disamping aplikasi-aplikasi militer, bidang-bidang aplikasi GPS yang cukup banyak saat ini antara lain meliputi survai pemetaan, geodinamika, geodesi, geologi, geofisik, transportasi dan navigasi, pemantauan deformasi, pertanian, kehutanan, dan bahkan juga bidang olahraga dan rekreasi (Hasanudin, 2007).
Semakin hari tuntutan terhadap kinerja robot semakin banyak, robot semakin diharapkan bisa lebih dan terus lebih canggih, contohnya wheel robot yang pada awal nya digerakan manusia sekarang dituntut untuk dapat bergerak sendiri secara otomatis, berdasarkan tuntutan ini maka penulis tertarik untuk mengkaji, meneliti, merancang dan membangun sebuah robot beroda otomatis yang dapat bergerak secara otomatis ketempat-tempat yang telah ditentukan sebelumnya, untuk bisa melakukan hal tersebut robot beroda ini haruslah dipadukan dengan teknologi lain, yaitu GPS (Global Positioning System).
METODE PENELITIAN
Secara umum sistem yang dibangun ini terdiri dari beberapa bagian yaitu, masukan (input), kontroler, dan keluaran (output). Pada bagian masukan terdapat keypad, GPS Ublox Neo-6M, CMPS11 Tilt Compensated Magnetic Compas, serta sensor jarak HC-SR04. Pada bagian keluaran terdapat motor DC dan LCD. Sedangkan kontrolernya menggunakan Arduino Mega 2560.
GPS
Keypad
Motor
Motor driver
LCD
Sensor
jarak
Compass
Berdasarkan diagram blok, GPS Ublox Neo-6M berfungsi sebagai pendeteksi koordinat robot. Dengan demikian robot dapat mengetahui dimana letak robot tersebut berada. Robot dapat mengetahui koordinatnya melalui data longitude dan latitude yang diterima dari modul GPS. CMPS11 Tilt Compensated Magnetic Compas digunakan untuk mendeteksi arah dari robot. Robot perlu mengetahui arah supaya robot dapat menuju tempat tujuan yang telah ditentukan. Dengan adanya sensor kompas akan mempermudah robot dalam bernavigasi serta mempercepat robot untuk menuju koordinat tujuan yang telah ditentukan. Supaya robot dapat menghindari halangan yang mungkin ada ketika robot mencari kooordinat yang telah ditentukan, maka robot harus dapat mendeteksi benda-benda yang mungkin ada disekitarnya. Untuk itu, penulis menggunakan sensor jarak HC-SR04 untuk mendeteksi dinding ataupun benda lain yang menghalangi jalan robot. Ketika robot mendeteksi adanya halangan, maka robot akan berusaha menghindari halangan tersebut.
Dengan demikian robot akan tetap dapat menuju titik koordinat yang ditentukan walaupun terdapat halangan di sekitarnya. Robot beroda membutuhkan interface (antarmuka) antara robot dengan pengguna. Untuk itu, penulis menambahkan sebuah keypad dan LCD supaya pengguna dapat memberikan perintah pada robot dan dapat melihat data yang diproses robot. Dengan demikan pengguna dapat memasukkan koordinat tujuan yang diinginkan pada robot dengan mudah. Motor berfungsi sebagai penggerak roda supaya robot beroda dapat berpindah tempat. Agar dapat bekerja secara maksimal maka motor tersebut harus diberi driver
motor sebelum dikontrol oleh arduino mega 2560. Arduino Mega 2560 berfungsi sebagai
kontroler yang mengatur semua kinerja dari robot. Sehingga semua perintah untuk mengendalikan berpusat pada aruduino mega 2560.
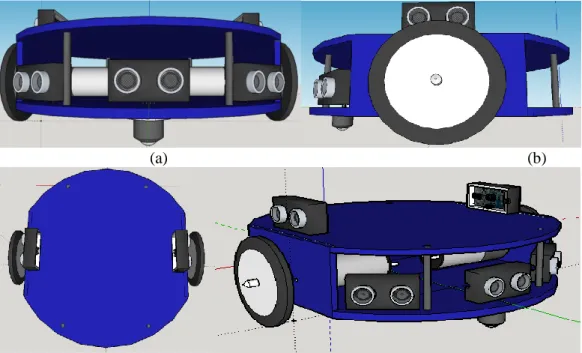
Robot beroda yang dibuat memiliki dua buah roda yang digerakkan oleh motor dan sebuah roda bebas. Robot ini didesain seperti itu karena menurut penulis, model tersebut lebih mudah dikontrol dibandingkan dengan menggunakan empat buah roda yang digerakkan oleh motor. Desain dari robot beroda juga tidak boleh mengurangi fungsi dari robot itu sendiri supaya robot dapat bekerja sesuai dengan yang diingingkan. Berikut ini merupakan desain dari robot beroda.
(a) (b)
(c) (d)
Gambar 2. Desain robot (a) Desain robot tampak depan, (b) Desain robot tampak samping, (c) Desain robot tampak atas,(d) Desain robot tampak miring.
Bahan utama yang digunakan untuk membuat robot ini adalah kaca akrilik dengan ukuran ketebalan 3 mm. Kaca akrilik dipilih sebagai bahan utama karena relatif kuat dan mudah dibentuk. Selain itu, kaca akrilik memiliki harga yang cukup murah dan mudah didapat.
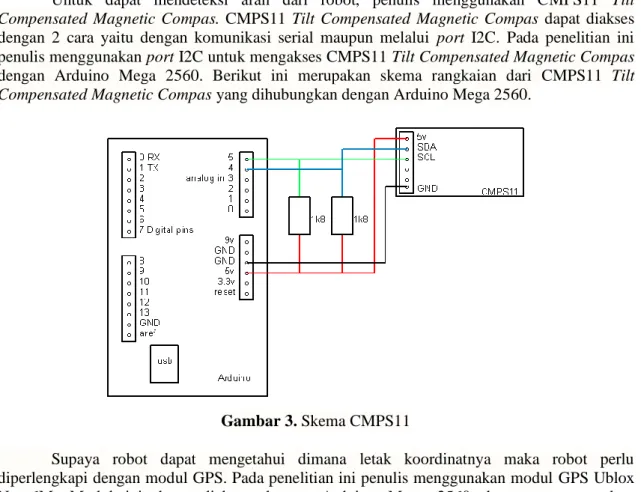
Untuk dapat mendeteksi arah dari robot, penulis menggunakan CMPS11 Tilt
Compensated Magnetic Compas. CMPS11 Tilt Compensated Magnetic Compas dapat diakses
dengan 2 cara yaitu dengan komunikasi serial maupun melalui port I2C. Pada penelitian ini penulis menggunakan port I2C untuk mengakses CMPS11 Tilt Compensated Magnetic Compas dengan Arduino Mega 2560. Berikut ini merupakan skema rangkaian dari CMPS11 Tilt
Compensated Magnetic Compas yang dihubungkan dengan Arduino Mega 2560.
Gambar 3. Skema CMPS11
Supaya robot dapat mengetahui dimana letak koordinatnya maka robot perlu diperlengkapi dengan modul GPS. Pada penelitian ini penulis menggunakan modul GPS Ublox Neo-6M. Modul ini dapat diakses dengan Arduino Mega 2560 dengan menggunakan komunikasi serial. GPS Ublox Neo-6M memiliki 4 buah pin yaitu VCC, TX, RX, GND. Modul ini bekerja pada tegangan 5V, sehingga kita dapat memberikan catu daya dari pin VCC Arduino Mega 2560. Konfigurasi pin dari perancangan GPS Ublox Neo-6M dengan Arduino Mega 2560 dapat dilihat pada gambar 4.
Gambar 3.4. Konfigurasi pin GPS Ublox Neo-6M.
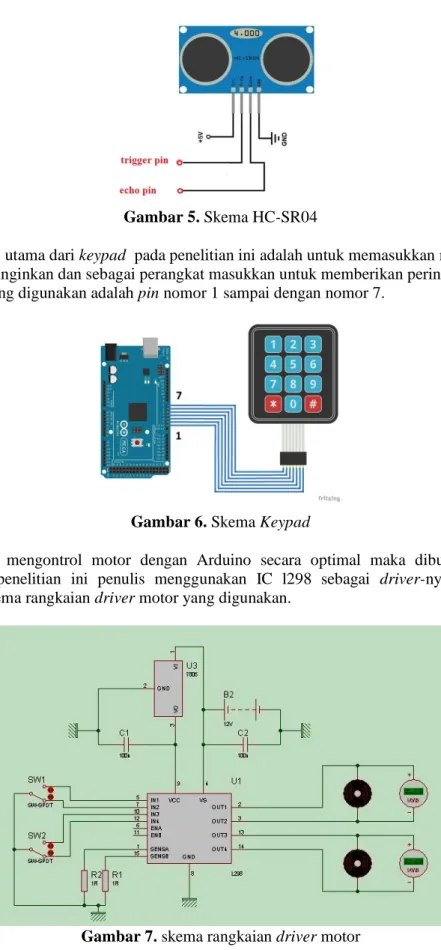
Sensor HC-SR04 memiliki 4 pin yaitu, Vcc, Trig, Echo dan GND. Sensor ini cukup mudah untuk dihubungkan dengan Arduino karena memiliki persyaratan daya yang sangat rendah (15mA) pin Vcc dan GND dapat dihubungkan langsung ke pin 5V dan GND pada Arduino. Pin Trig dan Echo dapat dihubungkan ke pin IO digital manapun di Arduino. Pada
Gambar 5. Skema HC-SR04
Fungsi utama dari keypad pada penelitian ini adalah untuk memasukkan nilai koordinat tujuan yang diinginkan dan sebagai perangkat masukkan untuk memberikan perintah pada robot beroda. Pin yang digunakan adalah pin nomor 1 sampai dengan nomor 7.
Gambar 6. Skema Keypad
Untuk mengontrol motor dengan Arduino secara optimal maka dibutuhkan driver motor. Pada penelitian ini penulis menggunakan IC l298 sebagai driver-nya. Berikut ini merupakan skema rangkaian driver motor yang digunakan.
HASIL DAN PEMBAHASAN
Pada gambar 8 dapat dilihat rancang bangun sistem autonomous pada robot beroda dengan GPS yang telah dibuat. Robot memiliki dua buah roda yang digerakkan oleh motor dan sebuah roda bebas.
Gambar 8. Hasil akhir robot beroda.
Untuk mengetahui kehandalan maka harus dilakukan pengujian. Pengujian robot ini diutamakan pada sebuah halaman yang datar dan bebas halangan/tidak ada halangan diatasnya. Pengujian dilakukan dengan cara mencari tempat yang akan menjadi tujuannya. Kemudian robot akan menyimpan data koordinat dari tempat tersebut. Lalu robot dipindahkan ketempat lain. selanjutnya robot diperintahkan untuk menuju koordinat dari tujuan yang telah disimpan sebelumnya. Robot akan mencari koordinat tujuan dan akan berhenti apabila sudah menemukannya. Jarak robot berhenti dengan koordinat tujuan dapat dilihat pada tabel 1, tabel 3 dan tabel 3. Uji coba alat dilakukan sebanyak 10 kali pada 3 tempat yang berbeda.
Tabel 1. Uji coba alat pada lokasi 1.
No Koordinat Tujuan Jarak robot berhenti dengan
koordinat tujuan (m) Longitude Latitude 1 112,793991 -7,292790 2,1 2 112,793991 -7,292790 1,5 3 112,793991 -7,292790 3 4 112,793991 -7,292790 3 5 112,793991 -7,292790 2 6 112,793991 -7,292790 1 7 112,793991 -7,292790 0,5 8 112,793991 -7,292790 2 9 112,793991 -7,292790 2 10 112,793991 -7,292790 2,1 Rata-rata 1,92
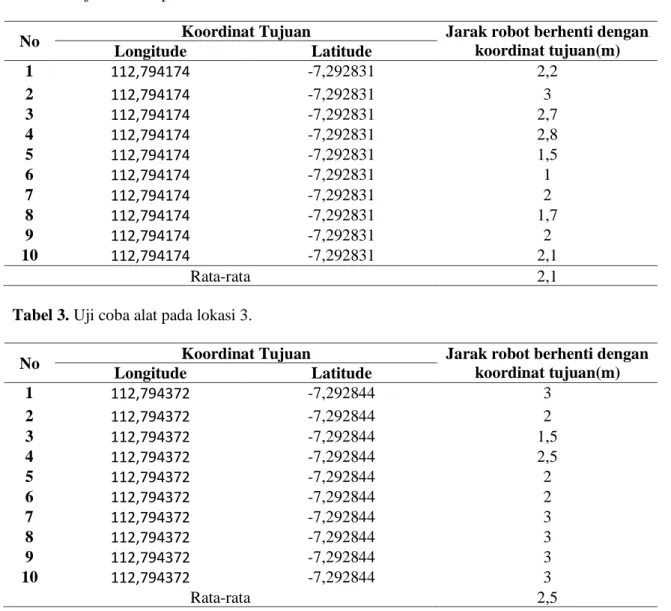
Tabel 2. Uji coba alat pada lokasi 2.
No Koordinat Tujuan Jarak robot berhenti dengan
koordinat tujuan(m) Longitude Latitude 1 112,794174 -7,292831 2,2 2 112,794174 -7,292831 3 3 112,794174 -7,292831 2,7 4 112,794174 -7,292831 2,8 5 112,794174 -7,292831 1,5 6 112,794174 -7,292831 1 7 112,794174 -7,292831 2 8 112,794174 -7,292831 1,7 9 112,794174 -7,292831 2 10 112,794174 -7,292831 2,1 Rata-rata 2,1
Tabel 3. Uji coba alat pada lokasi 3.
No Koordinat Tujuan Jarak robot berhenti dengan
koordinat tujuan(m) Longitude Latitude 1 112,794372 -7,292844 3 2 112,794372 -7,292844 2 3 112,794372 -7,292844 1,5 4 112,794372 -7,292844 2,5 5 112,794372 -7,292844 2 6 112,794372 -7,292844 2 7 112,794372 -7,292844 3 8 112,794372 -7,292844 3 9 112,794372 -7,292844 3 10 112,794372 -7,292844 3 Rata-rata 2,5
Dari hasil uji coba yang dilakukan, dapat dilihat bahwa robot dapat menuju lokasi yang telah ditentukan. Pada percobaan lokasi 1 robot beroda memiliki galat rata-rata 1,92 meter. Pada percobaan lokasi 2 robot beroda memiliki galat rata-rata 2,1 meter. Sedangkan pada percobaan lokasi 3 robot beroda memiliki galat rata-rata 2,5 meter. Hal ini dikarenakan adanya toleransi dari masing-masing sensor yang digunakan.
KESIMPULAN
Dari keseluruhan perancangan yang telah dibuat dan diuji maka dapat disimpulkan bahwa rancang bangun sistem autonomous pada robot beroda dengan GPS yang telah dibuat mampu menentukan koordinat tujuan serta menuju koordinat tujuan yang telah ditentukan dengan toleransi sebesar ± 2,5 meter.
DAFTAR PUSTAKA
Accudiy. 2011. HC-SR04 Ultrasonic Range Finder Manual.
Arduino. 2013. Arduino Mega 2560. http://arduino.cc/en/Main/. arduinoBoardMega2560 diakses tanggal 2 Januari 2017.
Devantech. 2013. CMPS11 - Tilt Compensated Compass Module. [terhubung berkala] http://www.robot-electronics.co.uk/cmps11-tilt-compensated-magnetic-compass.html. Diakses tanggal 27 Februari 2017.
Hasanudin ZA. 2007. Penentuan Posisi dengan GPS dan Aplikasinya. Jakarta: PT Pradnya Paramita.
Nugroho. 2009. Apa Sih Robot Itu? . [terhubung berkala]
http://nugroho.staff.uii.ac.id/2009/02/01/apa-sih-robot-itu/. Diakses tanggal 1 Februari 2017.
u-blox AG. 2011. HCNEO-6u-blox 6 GPS Modules Data Sheet.
https://www.u- blox.com/sites/default/files/products/documents/NEO-6_DataSheet_%28GPS.G6-HW- 09005%29.pdf?utm_source=en%2Fimages%2Fdownloads%2FProduct_Docs%2FNEO-6_DataSheet_%28GPS.G6-HW-09005%29.pdf. Diaskses 10 Februari 2017.
Rajan PT, dkk. 2014. Range Detection based on Ultrasonic Principle. The International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering Volume 3 Issue 2 Pages 7638-7642. ISSN(e): 2278–8875 ISSN (p): 2320–3765.