RANCANG BANGUN KONTROL POSISI
SKY QUALITY METER (SQM)
BERBASIS PEMROGRAMAN VISUAL
SKRIPSI
Diajukan untuk Memenuhi Sebagian dari Syarat untuk Memperoleh Gelar Sarjana Sains
Departemen Pendidikan Fisika Program Studi Fisika
Oleh
Prasika Dharma Yoga 0905805
PROGRAM STUDI FISIKA
DEPARTEMEN PENDIDIKAN FISIKA
FAKULTAS PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS PENDIDIKAN INDONESIA
RANCANG BANGUN KONTROL POSISI
SKY QUALITY METER (SQM)
BERBASIS PEMROGRAMAN VISUAL
oleh
Prasika Dharma Yoga
Sebuah skripsi yang diajukan untuk memenuhi sebagian syarat memperoleh gelar Sarjana Sains Program Studi Fisika Departemen Pendidikan Fisika
Fakultas Pendidikan Matematika dan Ilmu Pengetahuan Alam
© Prasika Dharma Yoga Universitas Pendidikan Indonesia
2015
Hak Cipta dilindungi undang-undang.
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
RANCANG BANGUN KONTROL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Nama : Prasika Dharma Yoga
NIM : 0905805
Pembimbing : 1. Ahmad Aminudin, M.Si. 2. Judhistira Aria Utama, M.Si. Program Studi : S-1 Fisika, FPMIPA, UPI
ABSTRAK
Telah dibuat alat kontrol posisi sensor Sky Quality Meter (SQM) berbasis pemrograman visual memiliki fungsi untuk mengatur posisi sudut azimuth dan altitude sensor SQM. Alat dapat dikontrol oleh user dari jarak yang jauh sehingga dapat mengatasi kekurangan SQM yang posisi sudutnya sulit diatur dan tidak dapat dikontrol dari jarak yang jauh. Penelitian ini terdiri dari 3 bagian yaitu bagian Graphical User Interface (GUI) pada komputer, controller dan aktuator. Pada penelitian ini alat dikontrol dari jarak 16 meter. Alat memiliki dimensi rangka penyangga berbentuk balok dengan panjang 300 mm, lebar 300 mm dan tinggi 1500 mm. Aktuator yang digunakan adalah motor stepper, dengan nilai putaran terkecil 1,8 derajat untuk menggerakan arah sudut sensor SQM. Motor stepper dikontrol oleh board Arduino UNO R3 setelah menerima perintah dari pengguna. Diantara motor stepper dan sensor SQM terdapat roda gigi untuk mengkonversikan sudut 1,8 derajat ke sudut 1 derajat. Roda gigi
driver memiliki jumlah 25 gigi dan roda gigi driven memiliki 45 gigi sehingga dapat
mengkonversikan sudut 1,8 derajat ke 1 derajat. Rata-rata error penunjukan sudut azimuth adalah 2,35 derajat dan memiliki rentang error sebesar 0 sampai 5 derajat. Rata-rata error penunjukan posisi sudut altitude adalah 1,4 derajat dan memiliki rentang nilai error sebesar 0 sampai 2 derajat. Graphical User Interface (GUI) memiliki tampilan untuk mengontrol posisi sudut azimuth dan altitude, informasi tentang arah sudut, mode Autoplot untuk mengambil data kecerahan langit kemudian memplot ke dalam grafik secara otomatis, pengaturan komunikasi serial dan pengaturan komunikasi ethernet. Hasil pembacaan nilai kecerahan langit ditampilkan di layar komputer dalam bentuk textbox, grafik dan database MySQL.
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
RANCANG BANGUN KONTROL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Nama : Prasika Dharma Yoga
NIM : 0905805
Pembimbing : 1. Ahmad Aminudin, M.Si. 2. Judhistira Aria Utama, M.Si. Program Studi : S-1 Fisika, FPMIPA, UPI
ABSTRACT
Has been designed to control the position of the Sky Quality Meter (SQM) based visual programming has a function to adjust the azimuth and altitude angle position sensor SQM. This tool created to address the shortage SQM unruly corner position and angle can not be controlled from a long distance. This research consists of three parts, namely the Graphical User Interface (GUI) on the computer, controllers and actuators. In this research tool is controlled from a distance of 16 meters. Tool has dimensions of the beam-shaped frame buffer with a length of 300 mm, width 300 mm and height of 1,500 mm. Tool frame has dimensions of 300 mm x 300 mm x 1500 mm. Actuators used are stepper motors, with the smallest value of 1.8 degree rotation to move the direction of the angle sensor SQM. Among the stepper motors and sensors contained SQM gears to convert the angle of 1.8 degrees to 1 degree angle. The gears have a number of drivers 25 and gear driven gear has 45 teeth so as to convert the angle of 1.8 degrees to 1 degree. Average error designation azimuth angle is 2.35 degrees and has an error range of 0 to 5 degrees. Average error of position altitude angle is 1.4 degrees and has a value range error of 0 to 2 degrees. Graphical User Interface (GUI) has a display to control the position angle of azimuth and altitude, information about the direction of the angle being read, Autoplot mode to retrieve the data and plotted into graphs automatically, setting serial communication and Ethernet communication settings. Sky brightness value readings displayed on a computer screen in the form textbox, graphics and database MySQL
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
DAFTAR ISI
UCAPAN TERIMA KASIH ... i
ABSTRAK ... ii
ABSTRACT ... iii
DAFTAR ISI ... iv
DAFTAR TABEL ... vi
DAFTAR GAMBAR ... vii
DAFTAR LAMPIRAN ... xiv
BAB I PENDAHULUAN A. Latar Belakang ... 1
B. Rumusan Masalah ... 3
C. Tujuan Penelitian ... 3
D. Batasan Penelitian ... 3
E. Manfaat Penelitian ... 4
F. Struktur Organisasi Skripsi ... 4
BAB II KAJIAN TEORI A. Sky Quality Meter (SQM)-LE ... 6
B. Fitur SQM-LE ... 7
C. Spesifikasi SQM-LE ... 8
D. Besaran Kecerahan Langit ... 8
E. Bortle Dark Sky Scale ... 9
F. Ethernet Interface ... 12
G. Komunikasi Serial USART ... 14
H. Arduino UNO ... 14
I. Memory Atmega 328 ... 16
J. Input dan Output Arduino UNO ... 16
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
L. Driver Motor Stepper DQ542MA ... 21
M. Roda Gigi ... 22
BAB III METODE PENELITIAN A. Metode Penelitian ... 27
B. Waktu dan Tempat Pelaksanaan ... 27
C. Alur Penelitian ... 27
D. Langkah Penelitian ... 29
BAB IV TEMUAN DAN PEMBAHASAN A. Pengukuran Beban ... 38
B. Desain dan Perancangan Kontrol Mekanik SQM... 40
C. Hasil Pembuatan Mekanik ... 51
D. Hasil Pengujian Hardware ... 54
E. Hasil Pembuatan Software ... 63
F. Hasil Pengujian Software ... 82
G. Pembuatan Keseluruhan ... 89
BAB V SIMPULAN,IMPLIKASI DAN REKOMENDASI A. Simpulan ... 91
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB I
PENDAHULUAN
A. Latar Belakang Penelitian
Pada saat melakukan pengamatan benda langit ada banyak faktor yang harus diperhatikan salah satunya adalah nilai kecerahan langit. Senja (1999) mengemukakan bahwa
Observasi kecerahan langit merupakan kegiatan untuk memperoleh informasi seberapa besar kemampuan detektor astronomi menangkap sinyal yang paling redup. Survey langit pada malam hari tersebut sangat diperlukan. Terutama oleh observatorium-observatorium yang mengadakan penelitian rutin terhadap objek-objek redup; seperti : galaksi, planetary nebulae dan sebagainya. Observasi astronomi secara optik memerlukan karakteristik lokasi yang mendukung observasi tersebut; antara lain: 1) Prosentase cuaca-cerahnya yang tinggi, 2) langitnya yang gelap, 3) transparansi-atmosfirnya yang tinggi, dan 4) turbulensi udaranya yang kecil. Salah satu karakteristik diatas; yaitu : langitnya yang gelap, dapat ditentukan kuantitasnya (seberapa gelap) melalui observasi kecerahan langit. (hlm.7)
Pada dasarnya nilai kecerahan langit bisa didapat dengan dua pendekatan. Pendekatan pertama dilakukan dengan pengukuran langsung dengan menggunakan instrumen fotometer seperti Sky Quality Meter (SQM). Pendekatan kedua dengan perhitungan menggunakan formula matematis.
SQM berfungsi untuk menentukan kecerahan langit malam dalam satuan
magnitudes per square arc second. SQM juga dapat digunakan untuk mengkuantisasi
2
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 1.1 Pemasangan SQM di Bosscha
Gambar 1.2 Tripod Manual Milik Laboratorium IPBA Fisika UPI
Dudukan alat SQM di laboratorium IPBA Fisika UPI dapat dirubah posisinya tetapi masih menggunakan cara manual sesuai dengan gambar 1.2 . Hal lain yang mengganggu kenyamanan adalah harus ada pengamat di dekat alat tersebut sehingga pengamat harus menaiki tempat tinggi untuk mengukur kecerahan langit jika posisi sudutnya harus berubah.
Maka dari itu diperlukan rancangan pengatur kontrol mekanik Sky Quality
Meter (SQM) . Kontrol posisi sudut sebenarnya sudah banyak dibuat dan dilakukan
3
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
pada panel surya dan kontrol posisi robot. Di pasaran alat kontrol mekanik SQM otomatis atau dikontrol pembacaan sudut bola menggunakan program komputer masih sangat jarang bahkan penulis belum pernah menemukannya. Perbedaan kontrol posisi yang dibuat pada tugas akhir ini adalah pada kegunaannya dan besaran sudut yang dikontrol adalah azimuth dan altitude. Software yang ada saat ini hanya dapat melakukan tampilan pembacaan kecerahan langit tanpa bisa mengontrol posisinya sehingga diperlukan tampilan antarmuka yang dapat memudahkan pengguna mengatur posisi sudut pembacaan SQM. Atas dasar inilah penulis tertarik untuk menulis judul mengenai “Rancang Bangun Kontrol Posisi Sky Quality Meter (SQM) Berbasis Pemrograman Visual” .
B. Rumusan Masalah Penelitian
Berdasarkan latar belakang penelitian, rumusan masalah adalah sebagai berikut: 1. Bagaimana rancang bangun kontrol posisi SQM dan dikontrol tanpa harus
berada di dekat SQM?
2. Bagaimana rancang bangun Graphical User Interface (GUI) untuk mengontrol posisi sudut sensor SQM melalui komputer dan menampilkan hasil pembacaan sensor SQM?
C. Tujuan Penelitian
Adapun tujuan dalam penulisan ini adalah sebagai berikut :
1. membuat alat kontrol mekanik Sky Quality Meter (SQM) dan dikontrol tanpa harus berada di dekat SQM.
4
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
D. Batasan Masalah
Batasan masalah dalam tugas akhir ini adalah
1. software design yang digunakan adalah Solidworks Premium 2010.
2. aktuator yang digunakan adalah motor stepper
3. antarmuka yang digunakan adalah Software Microsoft Visual Studio 2010.
4. board mikrokontroler yang digunakan adalah Arduino Uno R3.
5. transmisi yang digunakan adalah roda gigi lurus.
E. Manfaat
Pembuatan tugas akhir ini penulis berharap memberikan manfaat dilingkungan mahasiswa, peneliti dan masyarakat;
1. Bagi mahasiswa, penelitian ini diharapkan dapat menambah referensi keilmuan. 2. Bagi peneliti, penelitian ini diharapkan dapat menjadi referensi untuk
pengembangan teknologi kontrol posisi sudut.
3. Bagi masyarakat umum, penelitian ini diharapkan dapat menambah khasanah keilmuan.
F. Struktur Organisasi Skripsi
Sistematika penulisan skripsi ini terdiri dari 5 bab dan mengikuti panduan karya ilmiah UPI tahun 2014, yaitu:
BAB 1 Pendahuluan
Pada bab ini menjelaskan mengenai latar belakang, rumusan masalah, tujuan penelitian, batasan masalah, manfaat dan sistematika penulisan.
BAB II Kajian Teori
Pada bab ini menjelaskan mengenai kajian teori yang berhubungan dengan tugas akhir yang dibuat yaitu kajian teori mengenai sky quality meter (SQM) LE, fitur SQM LE, spesifikasi SQM LE, besaran kecerahan langit, bortle dark
5
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Atmega328, input dan output arduino UNO, motor stepper, driver motor
stepper DQ542MA dan roda gigi.
BAB III Metode Penelitian
Pada bab ini menjelaskan mengenai metode penelitian yang digunakan yaitu deskriptif dan eksperimen, alur penelitian, waktu dan tempat penelitian dan langkah penelitian.
BAB IV Temuan dan Pembahasan
Pada BAB IV ini membahas mengenai hasil penelitian dan pembahasan yang terdiri dari pengukuran, desain dan pembuatan program, hardware dan mekanik.
BAB V Simpulan, Implikasi dan Rekomendasi
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB III
METODE PENELITIAN
A. Metode Penelitian
Metode penelitian yang digunakan pada rancang bangun kontrol mekanik SQM adalah metode deskriptif dan eksperimen. Melalui metode deskriptif penulis menjelaskan permasalahan yang dibahas. Metode eksperimen dilakukan untuk merancang dan membuat konstruksi kontrol mekanik SQM baik dari segi mekanik,
hardware dan software.
B. Waktu dan Tempat Pelaksanaan
Penelitian dilaksanakan dilaksanakan pada: Waktu : November 2014 - Agustus 2015
Tempat : Laboratorium Instrumentasi, Fisika FPMIPA UPI. Workshop Produksi, FPMIPA UPI.
Workshop UKM KOMPOR UPI
C. Alur Penelitian
28
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
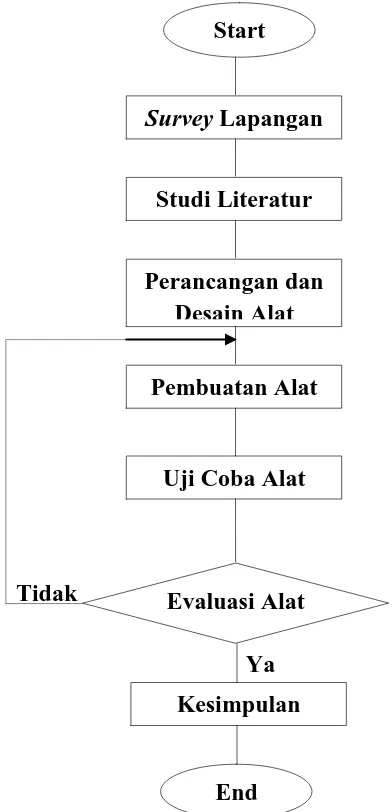
Gambar 3.1 Diagram Alir Penelitian
Dari gambar 3.1 dapat dideskripsikan langkah pertama adalah survey lapangan. Survey lapangan yang dilakukan adalah mencari referensi mengenai alat dan bahan yang tersedia di Universitas Pendidikan Indonesia agar penelitian ini berjalan lancar selanjutnya dilakukan langkah kedua yaitu studi literatur mengenai SQM-LE, perbandingan roda gigi dan kontrol motor stepper. Berdasarkan hasil studi
Ya Tidak Evaluasi Alat
Kesimpulan
End Start
Survey Lapangan
Studi Literatur
Perancangan dan Desain Alat
Pembuatan Alat
29
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
literatur kemudian langkah ketiga yaitu rancangan dan desain alat menggunakan
software Solidworks Premium 2010, Microsoft Visual Studio 2010 dan Arduino IDE.
Langkah keempat adalah pembuatan alat berdasarkan desain yang dibuat.Langkah kelima adalah menganalisis alat yang dibuat apakah sesuai dengan tujuan penelitian atau tidak. Jika sesuai maka langkah kelima adalah menyimpulkan hasil penelitian.
D. Langkah Penelitian
1. Survey Lapangan
Survey literatur dilakukan dengan cara mencari data alat yang akan digunakan di workshop produksi FPMIPA UPI agar penelitian dapat berjalan lancar. .
2. Studi Literatur
Studi literatur yang dilakukan dengan cara mencari dan mengumpulkan sumber sebagai bahan acuan yang akan digunakan pada penelitian ini. Studi literatur bertujuan agar penulis mengerti dan memahami mengenai kontrol motor stepper ,Graphical User Interface (GUI) Visual Studio`2010, pemrograman
microcontroller,desain konstruksi dan perhitungan roda gigi.
3. Perancangan dan Desain Alat
Perancangan dan desain alat yang pertama dibuat adalah algortima pengerjaan umum. Berikut adalah flowchart umum dalam perancangan alat
Posisi Sudut Sensor
30
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
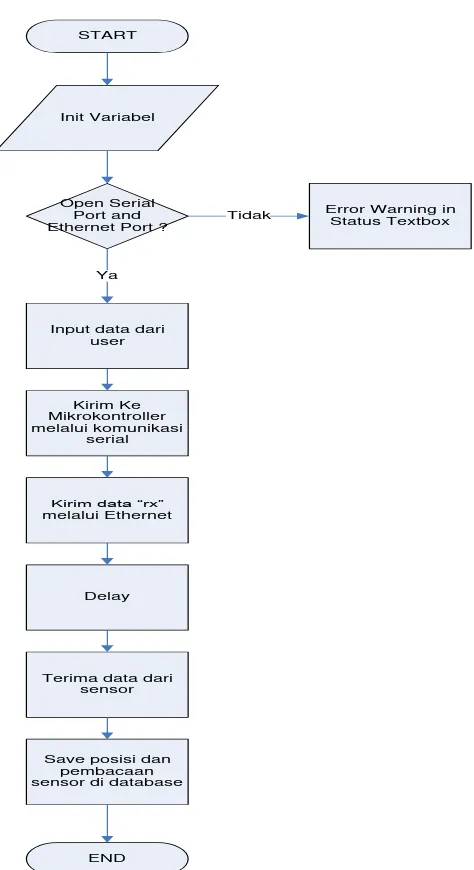
Berdasarkan diagram alir perancangan dan desain alat dapat dilihat bahwa alat yang dibuat dikontrol oleh user melalui PC kemudian PC mengirimkan data serial ke sistem kontrol. Sistem kontrol di program agar ketika diberi input, sistem kontrol mengeluarkan output agar motor stepper bergerak sesuai dengan data masukan user.
31
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
START
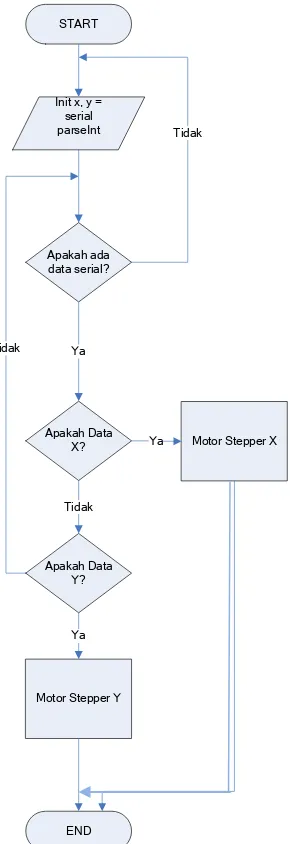
Gambar 3.3 Diagram Alir Pemrograman Visual
32
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.4 Contoh Tampilan Windows Form Application GUI
Gambar 3.5 Contoh Tampilan Windows Form Application
33
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.6 Contoh MySQL Workbench
34
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
START
Init x, y = serial parseInt
Apakah Data
X? Motor Stepper X
Motor Stepper Y Ya
END Apakah ada data serial?
Ya
Tidak
Apakah Data Y? Tidak
Ya Tidak
Gambar 3.7 Diagram Alir Pemrograman Mikrokontroller
35
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.8 Contoh Tampilan Arduino IDE
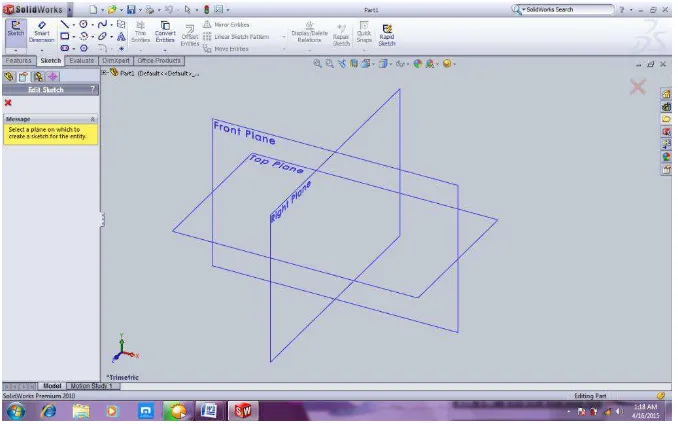
Setelah desain program selesai, maka diteruskan dengan pembuatan desain mekanik. Software desain yang digunakan adalah Solidworks Premium 2010 karena mendukung pemodelan desain 3D dan 2D. Berikut adalah tampilan Software
Solidworks 2010 Premium :
36
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
4. Pembuatan alat
Pembuatan alat ini dilaksanakan di Workshop Produksi FPMIPA UPI dan Mini Workshop UKM KOMPOR UPI . Alat yang digunakan dalam pembuatan alat ini adalah
a. Alat-alat kerja bangku (kikir, gergaji ,dsb) b. Mesin Las
c. Mesin Bor d. Mesin Gerinda e. Mesin Bubut f. Mesin Freis
Bahan yang digunakan dalam pembuatan alat ini adalah a. Profil Besi Hollow Kotak ukuran 3cm x 3cm
b. Hubben Putar Diameter 30 cm dan 20 cm c. Baud dan Mur Ukuran 4 cm dan 5 cm d. Alumunium Silinder Diameter 5 cm e. Acrylic 3 mm
f. Motor Stepper Torsi 30 kg.cm
Bagian-bagian yang dibuat dalam alat ini adalah a. Rangka Besi
b. Roda gigi dengan jumlah gigi 45 c. Roda gigi dengan jumlah gigi 25 d. Dudukan Motor
37
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
5. Uji Coba
Pada tahap ini alat diuji coba mulai dari program, hardware dan mekanik. Program diuji coba dengan cara mengecek komunikasi serial maupun komunikasi dengan database. Hardware di ujicoba dengan cara mengukur tegangan keluar pada masing- masing blok. Mekanik diuji coba dengan menggerakan sudut sesuai dengan sudut yang diinginkan user.
6. Evaluasi Alat
Evaluasi Alat yang dimaksud adalah evaluasi alat secara keseluruhan. Alat dioperasikan step by step hingga dapat mendeteksi nilai kecerahan langit dan dapat di
input ke dalam database.
7. Kesimpulan
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB V
SIMPULAN,IMPLIKASI DAN REKOMENDASI
A. Simpulan
Setelah melakukan kajian terhadap teori, merancang alat, membuat alat serta melakuan pengujian terhadap alat maka penulis dapat menyimpulkan sebagai berikut:
1. Rancang Bangun Kontrol Mekanik SQM terdiri dari sistem mekanik, sistem hardware dan sistem software. Sistem mekanik memiliki dimensi alat 300 mm x 300 mm x 1500 mm, perbandingan gear 25: 45 untuk mengkonversikan sudut 1,8 derajat ke sudut 1 derajat. Sistem hardware yang terdiri dari rangkaian arduino UNO R3, driver motor, motor stepper dan interface mikrokontroler dengan komputer dan sensor. Tegangan rata-rata yang dibutuhkan sebagai input power supply adalah 221,97 VAC dengan arus rata-rata sebesar 0,239 A. Output yang dihasilkan memiliki tegangan rata-rata 36,05 VDC dengan arus rata-rata 0,633 A. Output yang dihasilkan power supply merupakan input dari driver motor stepper sehingga menghasilkan logika 0 dan 1. Arus logika 1 adalah 3.22 A dan logika 0 adalah 0,03 A. Rata-rata error penunjukan sudut azimuth adalah 2,356756757 derajat dan memiliki rentang error sebesar 0 sampai 5 derajat. Rata-rata error posisi sudut altitude adalah 1,4 derajat dan memiliki rentang nilai error sebesar 0sampai 2 derajat. . Sistem program yang terdiri dari Graphical User Interface (GUI) dan program mikrokontroller. GUI dan program mikrokontroller menggunakan bahasa C++.
92
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
altitude dan Autoplot yang dapat membaca sensor pada sudut tertentu dengan
perulangan dan waktu yang ditentukan oleh pengguna.
B. Implikasi dan Rekomendasi
Selama penulis merancang, membuat, menguji, penulis menemukan beberapa hal yang harus diperhatikan dan dikaji lebih jauh sebagai berikut:
1. Transmisi roda gigi memiliki kelemahan karena memiliki backlash (jarak antara 2 gigi dalam 2 roda gigi yang berbeda) sehingga nilai pulsa motor stepper akan berubah ketika clockwise dan counterclockwise. Rekomendasi yang dapat dilakukan oleh peneliti selanjutnya adalah menggunakan transmisi sabuk timing (timing belt) karena tidak akan terjadi backlash.
2. Pembuatan alat ini sebaiknya menggunakan CNC (Computer Numerical
Control) sehingga hasilnya lebih presisi dan mudah dikontrol.
Rekomendasi penulis menggunakan 3D printing dan laser cutting.
3. Sensor putaran yang digunakan sebaiknya memiliki resolusi minimal 1 derajat karena akan mempengaruhi akurasi pembacaan dan penunjukan sudut.
Prasika Dharma Yoga, 2015
RANCANG BANGUN KONTOL POSISI SKY QUALITY METER (SQM) BERBASIS PEMROGRAMAN VISUAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
DAFTAR PUSTAKA
Arumaningtyas, E.P (2012) Pengukuran Kecerlangan Langit Menggunakan Sky
Quality Meter.(Tesis). Institut Teknologi Bandung.
Bortle, J.E. (2001) Introducing The Bortle Dark-Sky Scale. Sky & Telescope.
Igoe, Tom (2009). Stepper Library.[Online]. Diakses dari https://www.arduino.cc/en/Reference/Stepper.
Khurmi dan Gupta (2010). Machine Design. New Delhi: Eurasia Publishing House.
Luthfiandari (2014) Pengukuran Polusi Cahaya Kota Bandung Menggunakan
Fotometer Portabel dan Citra Malam Hari Defense Meteorological Satellite Program. (Skripsi). Jurusan Pendidikan Fisika UPI. Universitas Pendidikan
Indonesia.
Senja, M. A. (1999) Penentuan Kecerahan Langit Malam di Obsevatorium
Bosscha-Lembang: Observasi dan Model. (Skripsi). Jurusan Astronomi FMIPA.
Institut Teknologi Bandung.