BAB. XV. Prinsip Directional Drilling
TUJUAN
Memahami alasan-alasan yang mendasari dilakukannya pemboran berarah Mengenali Tipe-tipe pemboran berarah
o Shallow Deviation Type o Deep Deviation Type o Return to Vertical Type
Memahami proses pembuatan kemiringan lubang dan masalah-masalah yang dihadapi
Mengenali metoda-metoda yang digunakan untuk pengarahan lubang pemboran
Mengenali peralatan-peralatan survey
Memahami faktor-faktor yang mempengaruhi kemiringan dan arah lubang pemboran
o Faktor formasi o Faktor mekanis
Mengenali cara-cara pengontrolan terhadap penyimpangan sudut lubang pemboran
Memahami penggunaan Bottom Hole Assembly dalam pemboran berarah Memahami metoda-metoda perhitungan hasil survey pemboran berarah
15.1. Pendahuluan
Pemboran berarah adalah suatu seni membelokkan lubang sumur untuk kemudian diarahkan ke suatu sasaran tertentu di dalam formasi yang tidak terletak vertikal dibawah mulut sumur. Di dalam membor suatu formasi, sebenarnya selalu diinginkan lubang yang vertikal, karena dengan lubang yang vertikal, kecuali operasinya lebih mudah, juga umumnya biayanya lebih murah dari pada pemboran berarah. Jadi pemboran berarah hanya dilakukan karena alasan-alasan dan keadaan yang khusus saja. Adapun alasan-alasan dilakukannya pemboran berarah ini adalah :
A. Alasan topografis.
Pemboran berarah disini dilakukan apabila keadaan di permukaan tidak memungkinkan untuk mendirikan lokasi pemboran, misalnya:
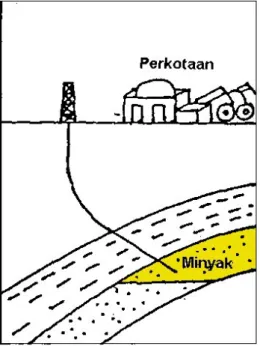
a. Formasi produktif terletak dibawah paya-paya, sungai (Gambar. 15.1). b. Formasi produktif terletak di bawah bangunan-bangunan, perkotaan
(Gambar 15.2)
Gambar 15.2. Formasi Produktif Terletak di Bawah Perkotaan, Bangunan B. Alasan geologis.
Pemboran berarah disini dilakukan untuk menghindari kesulitan apabila dibor secara vertikal misalnya :
a). Adanya kubah garam (salt dome), (Gambar 15.3). b). Adanya patahan, (Gambar 15.4).
Gambar 15. 4. Pemboran Berarah Karena Patahan C. Alasan-alasan lain :
a. Pemboran yang dilakukan dengan sistem gugusan sumur (cluster system) untuk menghemat luasnya lokasi pemboran. Misalnya di lepas pantai (Gambar 15.5). Di permukaan dibuat beberapa sumur, kemudian di bawah permukaan lubang sumur tersebut menyebar. Sistem ini juga dapat dilakukan pada pemboran di daratan.
Gambar 15.5. Pemboran Dengan Cluster System
b. Mengatasi semburan liar (blow out) dengan relief well. (Gambar 15.6) c. Menghindari garis batas di permukaan. (Gambar 15.7).
Gambar 15.6. Relief Well
Gambar 15.7. Menghindari Garis Batas di Permukaan
15.2. Tipe Pemboran Berarah
Gambaran umum dari suatu sumur pemboran berarah dan bagian-bagian yang penting dapat dilihat pada (Gambar 15.9).
Gambar 15.9. Gambaran Umum Pemboran Berarah dan Bagian-Bagiannya Pada dasarnya dikenal 3 macam pemboran berarah (Gambar 15.10), yaitu:
Gambar 15.10.Tipe Belok Pemboran Berarah 15.2.1. Tipe belok di tempat dangkal (Shallow Deviation Type).
Di sini titik belok (kick of point) terletak di kedalaman yang tidak begitu jauh dari permukaan tanah (dangkal).
15.2.2. Tipe belok di tempat dalam (Deep Deviation Type). Di sini titik belok terletak jauh di dalam permukaan tanah.
15.2.3. Tipe kembali ke vertikal (Return to Vertikal Type).
Mula-mula sama seperti tipe belok di tempat dangkal, tetapi kemudian dikembalikan ke vertikal.
Adapun pemilihan tipe pemboran di atas didasarkan pada lokasi koordinat di permukaan dan jarak antara lokasi permukaan dengan sasaran (formasi produktif) apabila faktor-faktor lain tidak berpengaruh. Misalnya apabila jarak sasaran tidak begitu jauh dari sumbu vertikal yang melalui mulut sumur, maka kita memilih tipe belok di tempat dalam. Lain halnya apabila jarak sasarannya jauh dari sumbu vertikal tadi, kita akan memilih tipe belok di tempat dangkal.
15.3. Kemiringan Lubang Bor
Di dalam pemboran berarah, pada kedalaman titik belok tertentu, lubang bor diarahkan ke suatu sasaran yang dikehendaki dengan sudut kemiringan yang tertentu. Miringnya lubang bor ini mendatangkan banyak kesulitan antara lain :
1. Fatigue failure pada drill pipe.
2. Key seating atau terjepitnya sebagian drill string karena goresan antara drill string dengan dinding lubang bor seperti terlihat pada Gambar 15.15.
3. Berkurangnya umur drill pipe karena tension (tegangan) yang terjadi pada tool joint (sambungan).
Kesulitan-kesulitan di atas disebabkan oleh perubahan sudut kemiringan yang terlalu besar (mendadak) diantara dua titik di dalam lubang bor. Untuk mengatasi kesulitan- kesulitan tersebut, perlu ditetapkan perbedaan sudut maksimum yang diizinkan diantara dua titik survey (sudut dog leg). Dari sudut dog leg ini dapat ditetapkan perubahan sudut kemiringan yang diperkirakan tidak akan menimbulkan kesulitan.
Gambar 15.11. Key Seating36) 15.3.1. Alat-Alat Pembuat Sudut (Deflection Tool)
Setelah kedalaman titik belok ditentukan, maka mulai dari titik tersebut kita mengarahkan lubang bor ke sasaran tertentu dengan membelokkan lubang bor dengan sudut kemiringan tertentu. Alat-alat pembelok ini adalah :
Badger bit
Spud bit
Knuckle joint
Whipstock
Turbodrill
Dyna drillSetelah mencapai sudut tertentu (14o misalnya) maka digunakan
bottomhole assembly baik untuk menambah atau memantapkan sudutnya. a. Badger Bit.
Badger bit dan operasi alatnya dapat dilihat pada Gambar 15.12. Prinsip kerja dari alat ini adalah adanya salah satu nozzle pada bit yang ukurannya lebih besar dari yang lainnya. Hal ini akan mengakibatkan semburan lumpur yang lebih besar sehingga lubang akan membelok ke arah dimana ukuran nozzle lebih besar.
Gambar 15.12. Badger Bit dan Cara Kerjanya b. Spud Bit
Jenis alat ini dapat dilihat pada Gambar 15.13. Alat ini merupakan bit tanpa roller, bentuknya seperti baji dan mempunyai nozzle. Cara kerjanya sama dengan badger bit hanya disini ditambah dengan tumbukan.
Gambar 15.13. Spud Bit di Lubang Bor c. Knuckle Joint
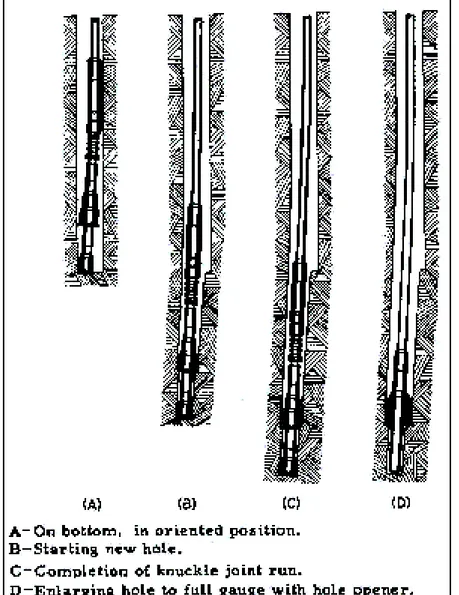
Knuckle joint adalah suatu drill string yang diperpanjang dengan sendi peluru, sehingga memungkinkan putaran bersudut antara drill string dan bitnya. Gambar 15.14 menunjukkan operasi suatu knuckle joint, dimana sebelumnya dibuat terlebih dahulu pilot hole yang kemudian dibor kembali dengan bit yang dirangkaikan dengan reamer.
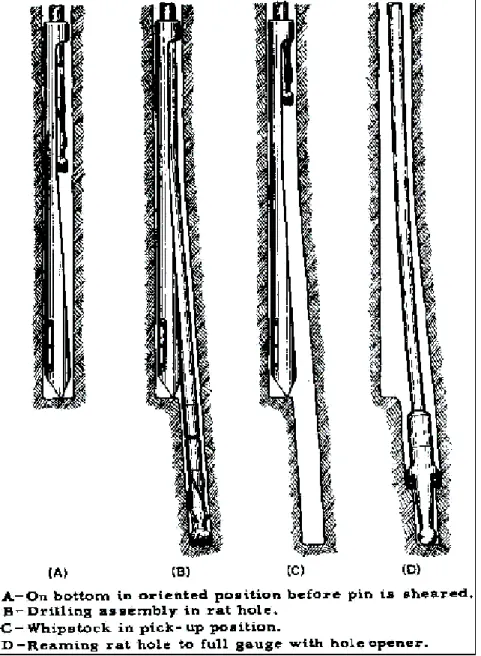
Gambar 15.14. Knuckle Joint 12) d. Whipstock
Adalah suatu alat yang terbuat dari besi tuang yang berbentuk baji dengan saluran yang melengkung tempat bergeraknya bit. Operasi dari whipstock dapat dilihat dari Gambar 15.15. Dengan alat ini akan diperoleh lengkungan sebesar 1 sampai 7 derajat.
Gambar 15. Whipstock dan Operasi Alatnya 12) e.Turbodrill.
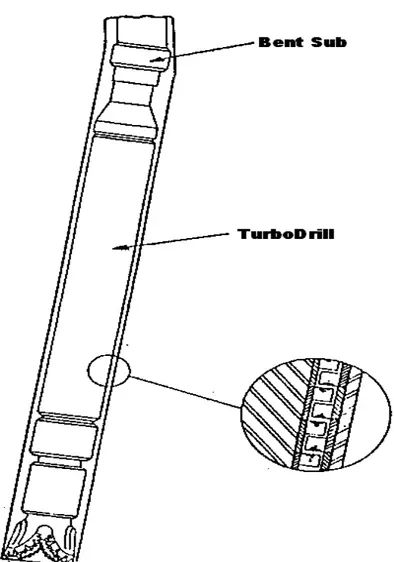
Turbodrill adalah down hole mud turbin yang dapat memutar bit tanpa harus memutar rangkaian bor (drill string). Kecepatan putaran sangat tergantung kepada volume lumpur dan tekanan sirkulasi di permukaan. Adanya bent sub pada turbodrill (Gambar 15.16) menyebabkan dapat membeloknya lubang sumur.
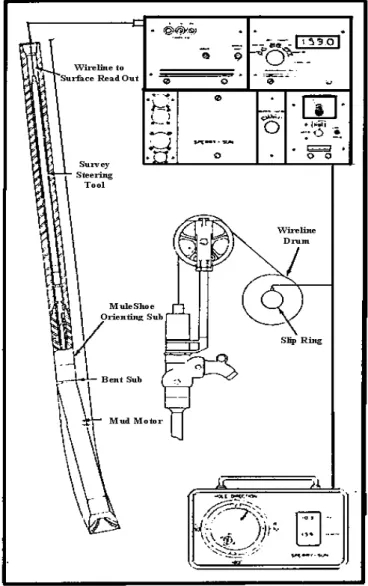
Gambar 15.16. Bent Sub Pada Turbodrill f. Dyna Drill.
Dyna Drill adalah down hole mud motor. Alat ini dibuat oleh Dyna Drill Coy. Seperti juga Turbodrill, Dyna Drill akan memutar bit tanpa harus memutar drill string. Adanya bent sub pada Dyna Drill menghasilkan lengkungan yang halus (smooth). Alat ini dapat dilihat pada gambar 15.17. Di dalam pemakaiannya, Dyna Drill tergantung kepada kecepatan sirkulasi lumpur dan beda tekanan pompa seperti terlihat pada Tabel 15.1. Dyna Drill Coy juga telah membuat Tabel 15.2, untuk memilih kelengkungan lubang bor yang sesuai dengan ukuran lubang bor dan perubahan sudut yang diharapkan.
Gambar 15.17. Bent Sub Pada Dyna Drill Tabel 15.1. Data Operasi Dyna Drill11) Ukuran Dyna Drill in, 0D Volume Lumpur Gpm Beda Tekanan psi Kecepatan Putar rpm Diameter Lubang Bor in 5 225 225 400 6 – 7 7/8 6 1/2 325 225 350 8 ¾ --12 ¼ 7 3/4 400 225 350 10 5/8 --15
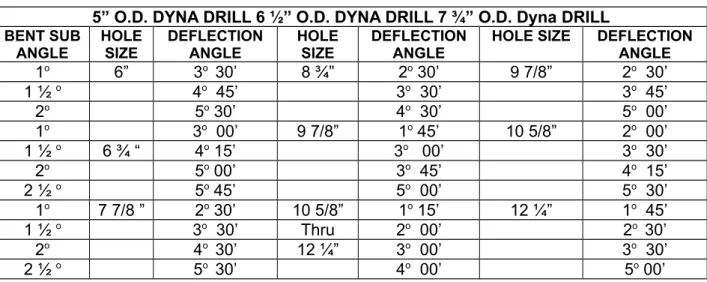
Tabel 15.2. Sudut Defleksi Yang Diharapkan Per 100 Ft.11) 5” O.D. DYNA DRILL 6 ½” O.D. DYNA DRILL 7 ¾” O.D. Dyna DRILL BENT SUB
ANGLE HOLESIZE DEFLECTIONANGLE HOLESIZE DEFLECTIONANGLE HOLE SIZE DEFLECTIONANGLE
1o 6” 3o 30’ 8 ¾” 2o 30’ 9 7/8” 2o 30’ 1 ½ o 4o 45’ 3o 30’ 3o 45’ 2o 5o 30’ 4o 30’ 5o 00’ 1o 3o 00’ 9 7/8” 1o 45’ 10 5/8” 2o 00’ 1 ½ o 6 ¾ “ 4o 15’ 3o 00’ 3o 30’ 2o 5o 00’ 3o 45’ 4o 15’ 2 ½ o 5o 45’ 5o 00’ 5o 30’ 1o 7 7/8 ” 2o 30’ 10 5/8” 1o 15’ 12 ¼” 1o 45’ 1 ½ o 3o 30’ Thru 2o 00’ 2o 30’ 2o 4o 30’ 12 ¼” 3o 00’ 3o 30’ 2 ½ o 5o 30’ 4o 00’ 5o 00’
15.4. Pengarahan Lubang Bor
Sewaktu membelokkan lubang bor dengan alat-alat pembelok, lubang bor harus selalu ke arah dimana sudut tersebut dapat mencapai sasaran. Pengarahan ini dapat dilakukan pada titik belok atau setelah titik belok apabila ternyata lubang yang dibuat telah menyimpang dari sasaran yang dikehendaki.
15.4.1. Metoda Pengarahan
Kita mengenal dua cara di dalam pengarahan ini, yaitu metoda Stokenbury Drill Pipe Alligment dan metoda Orientasi Dasar Lubang.
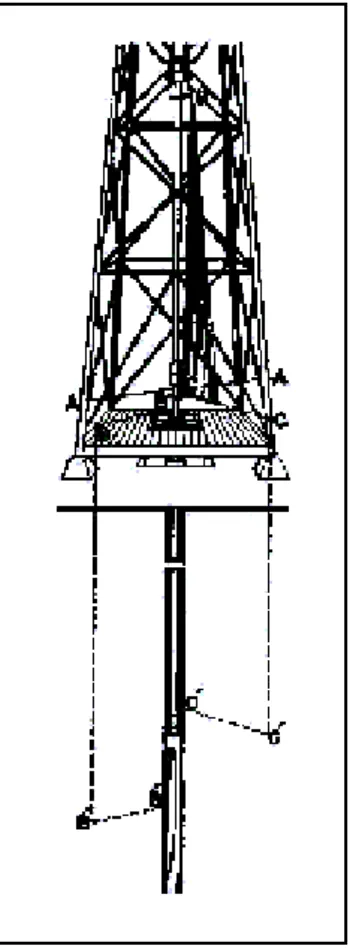
a. Metoda Stokenbury Drill Pipe Alligment. Metoda ini caranya seperti Gambar 15.18.
Mula-mula alat pembelok di permukaan dihadapkan ke arah mana sasaran dikehendaki, misalnya B-B'.
Pada drill pipe diikatkan suatu sighting bar (tanda) dan di arahkan ke suatu titik, disini misalnya diarahkan ke kaki derrick (titik C).
Pasang drill pipe baru, kemudian di dekat puncak drill pipe inidipasang sighting bar yang kedua dan diluruskan dengan yang pertama dengan bantuan teleskop.
Sighting bar yang pertama diturunkan, untuk kemudian dipasang lagi pada drill pipe yang berikutnya dan diluruskan kembali seperti tadi dengan teleskop.
Demikian seterusnya sampai seluruh drill string berada didasar lubang.Kelemahan metoda ini adalah memakan waktu yang panjang, juga sering menimbulkan kesalahan sehingga cara ini jarang digunakan.
Gambar 15.18. Metoda Stokenbury Drill Pipe Alligment.12) b. Metoda Orientasi Dasar Lubang.
Metoda ini banyak digunakan pada operasi-operasi pemboran terarah. Prinsipnya adalah sebagai berikut :
Misalkan, “muka” alat pembelok mempunyai arah 90o ke arahkanan dari kutub magnet utara yang telah ditentukan (Gambar 15.19) pada Shadow Graph Compass.
Gambar 15.19. Metoda Orientasi Dasar Lubang
Turunkan alat pembelok ini ke dasar lubang. Sebuah kamera memotret bersama-sama free compass dan shadow graph compass.
Misalnya gambar yang didapatkan ternyata S 45oE. Ini berarti arah©mukaª alat pembelok adalah S 45oE ditambah putaran 90o kearah
kanan jadi S 45o W.
Jadi dengan mengetahui arah "muka" alat pembelok dalam lubang bor, akan mudah mengubah kearah yang dikehendaki.
15.4.2. Alat-Alat Survey
Selama operasi pemboran berarah, setiap telah dicapai titik-titik di kedalaman tertentu kita mengukur sudut kemiringan dan sudut arah lubang bor (melakukan survey). Dari pengukuran ini dapat diketahui penyimpangan sudut dari sasaran yang direncanakan sehingga dari setiap titik pengukuran ini kita dapat mengoreksi penyimpangan bila arah dan kemiringan telah menyimpang dan mengarahkan kembali kesasaran semula.
Tujuan dilakukan survey pada directional drilling adalah :
a. Untuk memonitor lintasan sumur sehingga dapat dibandingkan dengan lintasan yang direncanakan.
c. Untuk menentukan orientasi yang diperlukan untuk menempatkan alat pembelok (deflection tool) pada arah yang tepat.
d. Untuk menentukan lokasi yang tepat dari dasar sumur (koordinat dasar sumur).
e. Untuk menghitung dog-leg severity.
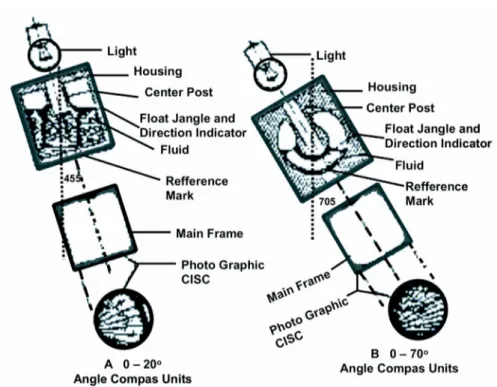
Peralatan yang digunakan terbagi atas dua macam yaitu Single Shot dan Multi Shot, dimana Single Shot hanya dapat mencatat pengukuran sekali sedangkan Multi Shot dapat berkali- kali. Prinsip kerja alat ini adalah sebagai berikut (Gambar 15.20). Sebuah kompas dan unit pencatat sudut yang berbentuk cakram dipotret bersama- sama oleh sebuah kamera. Hasil pemotretan ini akan menghasilkan penyimpangan dari vertikal, karena adanya fluida yang bebas bergerak, sedang arah dicatat pada unit pencatat (unit ini terdiri dari 3 macam : 0-12o, 0- 20o dan 15- 90o).
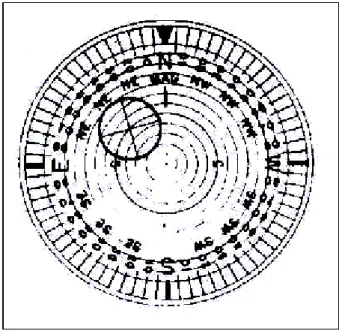
Sudut kemiringan lubang bor = 5 1/2 o
Sudut arah lubang bor = N 42oE.
Efek Kemagnetan Bumi Terhadap Pengukuran Dengan Alat- Alat
Survey.
Gambar 15.20. Contoh Alat Survey dan Prinsip Kerjanya9)
Sebagai contoh pembacaan lihat Gambar 15.21 (ini adalah contoh alat pencatat unit 0 -12o). Dari gambar ini dapat dibaca :
Gambar 15.21. Cara Pembacaan Pengukuran Alat Survey9) 15.4.3. Efek Kemagnetan Bumi Terhadap Pengukuran dengan Alat- Alat
Survey
Penggunaan alat-alat survey di dalam pengukuran sudut kemiringan dan sudut arah memerlukan pemakaian drill collar yang anti magnetik (alat survey ini diturunkan ke dalam lubang bor melalui drill pipe dan nantinya akan terletak pada drill collar di dekat bit). Pemakaian drill collar anti magnetik ini untuk menghindari kesalahan-kesalahan pengukur survey (kompas). Tetapi efek kemagnetan bumi masih berpengaruh terhadap pengukuran.
Thometz mengemukakan bahwa panjang drill collar anti magnetik yang diperlukan tergantung dari besarnya sudut kemiringan dan sudut arah lubang bor. Adanya tiga zone kemagnitan bumi yang berbeda digambarkan pada Gambar 15.22. Akibat dari perbedaan kemagnetan ini dapat dilihat bahwa kurva hubungan panjang drill collar anti magnetik yang diperlukan dengan sudut kemiringan dan sudut arah, akan berbeda untuk ketiga zone tersebut.
Sebagai ilustrasi, misalnya kita hendak melakukan survey di lokasi pemboran dengan koordinat 60o lintang utara dan 160o bujur barat (daerah
Arctik), sudut kemiringan maksimum diharapkan 40oE. Dari Gambar 15.23
Dari kurva 23 ternyata sudut-sudut ini jatuh dibawah kurva B. Jadi disini diperlukan non magnetik drill collar sepanjang 60 ft.
Gambar 15.22. Pembagian Zone Kemagnitan Yang Sama9)
Gambar 15.23. Kurva Non Magnetik Drill Collar Yang Diperlukan 15.5 . Faktor-Faktor Yang Mempengaruhi Kemiringan dan Arah Lubang Bor
Lubang bor yang dihasilkan di bawah permukaan menyimpang dari sudut yang diinginkan. Hal ini disebabkan lubang bor yang terjadi berbengkok-bengkok dengan sendirinya. Hal semacam ini disebut Crooked Hole (lubang bor pada pemboran terarah disebut Slant hole).
Penyebab Crooked Hole ini terdiri dari 2 faktor yang bekerja bersama-sama yaitu faktor formasi dan faktor mekanis.
15.5.1. Faktor Formasi
Pada formasi yang berlapis-lapis dengan bidang perlapisan yang miring maka lubang bor akan cenderung untuk tegak lurus pada bidang perlapisan. Penembusan bit pada formasi akan meninggalkan suatu baji kecil yang dapat bertindak sebagai whipstock kecil (miniature whipstock)
yang dapat membelokkan lubang sumur (Gambar 15.24). Teori ini disebut
Miniature Whipstock Theory.
Gambar 15.24. Miniature Whipstock Theory12)
Pada formasi dengan perlapisan yang berganti-ganti dari lunak ke keras dan sebaliknya akan menyebabkan bit ditahan dengan berat sebelah pada kedua sisinya, sehingga bit akan terperosok ke salah satu sisi dan mengakibatkan bengkoknya lubang bor (Gambar 15.25). Teori ini disebut
Formation Drillability Theory.
Gambar 15.25. Formation Drillability Theory
Pada formasi dimana kemiringan bidang perlapisan lebih besar dari 45o, maka bit akan cenderung mengikuti bidang perlapisan (Gambar 15.26).
Gambar 15.26. Formasi Dengan Bidang Perlapisan > 45o 15.5.2. Faktor Mekanis
Faktor-faktor ini menyangkut :
Drill collar yang tidak cukup kekar sehingga mudah melengkung.
Beban pada bit yang berlebihan sehingga drill collar melengkung.
Perubahan botton hole assembly akan memberikan bentuk lubangyang berlainan.
15.6. Pengontrolan Terhadap Penyimpangan
Dasar pemikiran pengaturan penyimpangan ini dapat diterangkan dengan teori Pendulum. Untuk menerangkan teori ini lihat Gambar 15.27, suatu drill string yang terdapat pada lubang bor yang miring. Karena ada clearance antara drill collar dan dinding lubang, pada jarak tertentu di atas bit, rangkaian drill string akan menempel pada dinding lubang bor. Titik ini (P) disebut titik kontak (point of contact). Di atas titik ini rangkaian drill string akan berbaring pada dinding lubang bor.
Gambar 15.27. Drill String Pada Lubang Bor Yang Miring (Teori Pendulum) Drill collar antara titik P dengan bit, akan bekerja sebagai gaya Fa dimana gaya ini cenderung untuk membelokkan lubang ke arah vertikal atau memperkecil sudut kemiringan. Selain daripada itu akan timbul pula gaya Fb yang merupakan akibat dari berat pada bit. Gaya ini cenderung untuk memperbesar sudut kemiringan karena membuat sudut dengan lubang bor (sudut b).
Didalam waktu yang sama gaya Fa dan Fb ini akan bekerja bersama-sama (dianggap tidak ada pengaruh formasi di sekitarnya), gaya-gaya ini akan menentukan penyimpangan sudut kemiringan lubang bor.
Gaya Fa merupakan fungsi berat per satuan panjang drill collar antara titik P dan bit, sedangkan gaya Fb tergantung kepada berat pada bit (weight on bit). Tetapi pengaruh gaya Fb ini pun akan berkurang dan akibatnya bending moment drill collar berkurang juga. Berkurangnya bending moment ini akan menyebabkan jarak titik P dan bit bertambah sehingga gaya Fa bertambah dan cenderung mengurangi penyimpangan lubang.
Dari uraian di atas dapat disimpulkan bahwa untuk mengontrol penyimpangan sudut dapat dilakukan dengan mengatur titik kontak P atau mengatur jarak titik P dengan bit. Hal ini dapat dilakukan dengan menggunakan drill collar yang dirangkaikan dengan stabilizer.
15.6.1. Penggunaan Drill Collar Dengan Stabilizer
Pada dasarnya, penggunaan drill collar dengan stabilizer pada suatu rangkaian drill string adalah untuk mengatur jarak titik kontak (P) dengan bit, sehingga secara tidak langsung mengatur gaya Fa dan Fb serta akan mengontrol penyimpangan. Sebagai gambaran dapat dilihat pada Gambar 15.28.
Bila kita bandingkan Gambar 15.28a dan 15.28b, akan terlihat bahwa dengan memperbesar berat drill collar akan mengakibatkan titik kontak P naik karena kekakuan drill collar naik dan sudut b mengecil. Hal ini mengakibatkan berat collar antara bit dan titik P naik sehingga Fa membesar dan Fb mengecil. Sekarang kita perhatikan Gambar 15.28c dan 15.28a. Clearance drill collar pada Gambar 15.28c mengecil mengakibatkan titik P mendekati bit. Hal ini menyebabkan gaya Fa mengecil dan Fb membesar.
Terakhir kita lihat Gambar 15.28d dan 15.28a. Pemasangan stabilizer disini akan mengakibatkan Fa membesar dan Fb mengecil. Jadi dari uraian di atas dapat disimpulkan bahwa pengaturan clearance dan penempatan stabilizer yang tepat akan dapat mengontrol penyimpangan.
Gambar 15.28. Penggunaan Drill Collar Dengan Stabilizer Pada Suatu Rangkaian Drill String
WILSON membuat hubungan antara ukuran drill collar minimum dengan diameter casing dan diameter bit sebagai berikut :
Diameter (OD) drill collar yang diizinkan = (Diameter CasingOD) -(Diameter bit-OD).
WOODS dan LUBINSKY membuat grafik-grafik untuk penempatan stabilizer(single stabilizer) agar weight on bit (WOB) dapat ditingkatkan secara maksimal dengan sudut kemiringan lubang bor yang tertentu.
Gambar 15.29a dan 15.29b adalah salah satu dari grafik-grafik yang telah dibuatnya.
Gambar 15.29. Grafik-grafik Untuk Penempatan Stabilizer (Single Stabilizer)12) Sebagai contoh, misalkan kita membor lubang dengan ukuran 8-3/4 inch dan ukuran drill collar 7 inch. Dengan kemiringan lubang maksimum 3o
Dengan melihat Gambar 15.29b. (tanda panah), akan dicapai kenaikan 25% pada WOB apabila dipasang stabilizer pada posisi yang ideal. Dari Gambar 29a dapat ditentukan bahwa posisi stabilizer yang ideal tersebut adalah sejauh 87 ft dari bit.
15.7. Penggunaan Bottom Hole Assembly
Dengan latar belakang teori yang telah dipaparkan pada bagian 16.5, pengaturan sudut kemiringan dan sudut arah dapat dilakukan dengan mengatur atau mengkombinasikan rangkaian bottom hole assembly. Ini biasanya dilakukan setelah mencapai sudut tertentu misalnya 14o.
Pengaturan ini termasuk antara lain mengatur titik kontak, memilih jarak penempatan stabilizer dari bit, memilih ukuran dan kekakuan drill collar yang tertentu, mengatur WOB dan RPM, mengatur jarak stabilizer pertama dan kedua dan lain-lain. Susunan bottom hole assembly yang ternyata berhasil baik digunakan pada suatu sumur, belum tentu baik pula diterapkan disumur lain, hal ini dikarenakan pengaruh daripada formasi yang dibor.
Dari uraian tersebut diatas, maka sangat diperlukan pengalaman di dalam pengaturan rangkaian botton hole assembly ini agar diperoleh hasil yang baik di dalam suatu operasi pemboran terarah. Disini letak seni daripada pemboran terarah ini.
Berikut ini akan diuraikan mengenai penggunaan berbagai susunan rangkaian bottom hole assembly yang umumnya digunakan sebagai dasar di dalam pemilihan posisi bottom hole assembly di dalam suatu pemboran terarah.
15.7.1. Vertical Hole Assembly
Susunan rangkaian ini umumnya digunakan untuk membor tegak lurus dari permukaan sebelum titik belok (KOP), atau bagian setelah drop off section (Gambar 15.30). Adapun susunan ini dapat digambarkan sebagai berikut:
Bit - Monel DC - DC - Stab - 90'DC - Stab - 90'DC – Stab
60' 90' 90'
dan seterusnya.
Apabila formasi yang dibor lunak, maka dianjurkan hal- hal dibawah ini : 1. WOB rendah
2. RPM tinggi
3. Output pompa sehingga sirkulasi lumpur cepat.
Gambar 15.30. BHA Untuk Seksi Vertikal9) 15.7.2. Build Up Assembly
Pada rangkaian ini reamer harus selalu ditempatkan di dekat bit. Adanya beban pada bit menyebabkan bagian drill collar di atas reamer membelok dengan kemiringan tertentu. Rate build up ini sangat tergantung kepada WOB, posisi reamer dan ukuran drill collar Gambar 15.31.
Untuk perubahan sudut build up yang besar, dianjurkan : 1. WOB tinggi
2. Ukuran monel drill collar kecil
3. RPM dan rate pemompaan kecil apabila formasi lunak.
Rangkaian bottom hole assembly yang umumnya digunakan pada build up section ini dapat digambarkan sebagai berikut .
Bit - Sub - Reamer - Monel DC - Stab - DC - Stab - 90'DC 4' 6' 60'
Gambar 15.31. BHA Untuk Menaikkan Inklinasi9) Untuk perubahan sudut build up kecil, dianjurkan :
1. WOB kecil.
2. Ukuran monel drill collar besar.
3. Tempatkan stabilizer pada puncak monel drill collar. 4. Tambah jarak bit - reamer.
5. Tambah RPM dan rate pemompaan pada formasi lunak. 15.7.3. Drop off Assembly
Dengan menambah jarak bit ke reamer, bagian bawah reamer mempunyai tendensi untuk mengarah ke bawah. Karena berat rangkaiannya, perlahan-lahan akan menghasilkan penurunan sudut pada drop off section tergantung pada WOB, RPM dan posisi reamer serta stabilizer pada rangkaian. Gambar 15.32.
Umumnya drop off assemblies ini berbentuk :
Bit - Monel DC - Reamer - DC - Stab - DC - Stab -90'DC- stab. 20'-30' 30' 30'
Gambar 15.32.BHA Untuk Menurunkan Inklinasi9) Untuk perubahan sudut drop off yang besar dianjurkan : 1. WOB kecil.
2. RPM dan rate pemompaan besar pada formasi lunak. 3. Ukuran monel besar.
4. Ukuran drill collar kecil diatas reamer.
Untuk perubahan sudut drop off yang kecil, dianjurkan: 1. WOB besar.
2. RPM dan rate pemompaan kecil pada formasi lunak. 3. Gunakan monel drill collar yang besar.
4. Kurangi jarak bit-reamer. 15.7.4. Tangent Assembly
Pada kasus ini sangat sukar menentukan tangent assemblies yang dapat sekaligus mengatur atau mempertahankan kemiringan dan arah lubang bor. Umumnya persoalan terbesar adalah di dalam mengontrol sudut arah, sedang mengontrol sudut kemiringan agak lebih mudah. Apabila WOB dan RPM diubah untuk dapat mempertahankan sudut arah, tetapi efek lain yang mengubah sudut kemiringan atau sebaliknya, juga faktor-faktor formasi sangat mempengaruhi.
Karena tangent assembly digunakan pada bagian dari lubang bor dimana sudut arah dan kemiringan harus dipertahankan tetap, maka rangkaiannya haruslah sekaku mungkin. Sangat sukar menemukan tangent
assemblies yang ideal atau kombinasi yang tepat. Pada beberapa kasus yang lain hasil akan baik dengan banyak ditempatkan stabilizer.
Beberapa susunan yang memberikan hasil yang baik adalah:
Bit-Reamer-Monel DC-Stab-Dc-Stab-DC-Stab-dst
Bit-10'DC-Reamer-Monel DC-Stab-DC-Stab-DC-Stab-dst.
Bit-15'DC-Reamer-15'DC-Reamer-Mone l DC-Stab-DC-Stab-dst
Bit-Reamer-Stab-Monel DC-Stab-Stab-DC-DC-Stab-dst.15.8. Metoda Analisa Pemboran Berarah
Di dalam perencanaan suatu pemboran berarah, lubang bor yang direncanakan dibuat pada bidang datar dengan sudut arah dan perubahan sudut kemiringan tertentu. Tetapi seperti yang telah diterangkan pada sub-bab yang lalu, lubang bor tidak akan terletak pada satu bidang disesub-babkan pengaruh dari banyak faktor. Baik sudut kemiringan maupun sudut arah lubang bor akan selalu berubah-ubah menyimpang dari yang telah direncanakan. Sehingga pada praktek suatu pemboran berarah, setelah dicapai kedalaman-kedalaman pemboran tertentu (biasanya setiap 50 - 100 ft kedalaman), dilakukan pengukuran sudut kemiringan dan sudut arah (dilakukan survey). Apabila terjadi penyimpangan, lubang bor tadi diarahkan kembali ke arah yang telah ditetapkan semula.
Sebagai gambaran sebenarnya, penampang horizontal suatu contoh sumur pemboran berarah dapat dilukiskan seperti terlihat pada Gambar 33.
Gambar 15.33. Penampang Horizontal Suatu Pemboran Berarah
Titik dan garis patah di dalam Gambar 15.33 (misalnya titik M) didapat setelah kita mengetahui koordinat titik tersebut dan titik ini disebut titik survey.
Terlihat dalam gambar bahwa titik tersebut menyimpang dari garis AE (garis yang telah direncanakan). Sehingga dari titik tersebut kita membetulkan arah kembali ke arah semula. Demikian seterusnya dengan titik survey selanjutnya hingga dicapai sasaran.
Hal yang sama terjadi pula pada penampang vertikalnya, sudut kemiringan yang terjadi akan selalu berubah-ubah menyimpang dari yang telah direncanakan.
Dari uraian di atas, masalah yang terpenting adalah menentukan koordinat titik-titik survey setepat mungkin disamping perencanaan pemborannya. Karena dengan diketahuinya titik-titik survey ini, maka kita dapatkan hal-hal berikut :
a. Mengetahui kedalaman vertikal (True vertikal depth) pada titik-titik tertentu di dalam lubang sumur.
b. Mengetahui penyimpangan dari sasaran, sehingga pada setiap titik survey dapat dikoreksi arah dan kemiringan lubang bor, mengarahkan kembali ke sasaran semula bila terjadi penyimpangan.
c. Dari hal a dan b di atas, dengan kata lain dapat diketahui sejauh mana lubang bor kita meleset atau berhasil mencapai sasaran.
15.8.1. Metoda-Metoda Perencanaan Pemboran Terarah
Di dalam merencanakan suatu pemboran terarah dikenal dua cara yaitu Metoda Tangensial dan Metoda Radius Of Curvature. Metoda yang disebutkan pertama merupakan metoda yang tertua yang dikenal sejak dimulainya pemboran terarah. Sedangkan metoda yang terakhir diperkenalkan oleh WILSON pada tahun 1968 yang merupakan perbaikan dari metoda Tangensial.
15.81.1. Perencanaan Dengan Metoda Tangensial.
Dari Gambar 15.34, setelah titik belok ditentukan (titik 1), build up section (1-2) dibuat dengan mengubah sudut kemiringan sampai dicapai sudut maksimum yang diinginkan. Tangen section (2-3) dibuat dengan mempertahankan sudut kemiringan maximum sampai kedalaman tertentu.
Drop off Section (3-4) dibuat dengan mengembalikan sudut maksimum ke nol derajat dan bagian back to vertical (4-5) dibuat dengan mempertahankan sudut kemiringan nol derajat.
Pada perencanaan dengan metoda Tangensial, dianggap bahwa interval-interval lubang berupa garis-garis patah (lurus untuk masing-masing interval) baik untuk build up maupun drop off section. Jadi dengan kata lain dianggap bahwa setiap interval yang diambil mempunyai sudut kemiringan yang sama pada awal, maupun pada akhir interval. Disini apabila diambil interval kecil-kecil (misal diambil MD setiap 100 ft) garis lengkung MD dianggap garis lurus, makin kecil kita mengambil intervalnya (misal 25 ft) perhitungan akan semakin teliti.
Gambar 15.34. Penampang Vertikal Suatu Lubang Bor (Metoda Tangensial).
I MD TVD cos ...(15-1) I MD H sin ...(15-2) dimana : TVD
= True vertical depth (kedalaman tegak) pada suatu interval lubang bor, ft.
H
= Drift (throw) atau penyimpangan horizontal pada interval tersebut, ft.
MD
= Measure depth pada interval tersebut, ft
I
= Besarnya sudut kemiringan pada interval tersebut, derajat. Sudut = A adalah sudut arah yang tetap besarnya.
Berdasarkan persamaan-persamaan (15.1) dan (15.2) dapat dibuat suatu program komputer perencanaan pemboran terarah dan dapat ditentukan TVD dan H untuk setiap harga I per MD tertentu (misalnya 2o/100ft, 4o/100 ft) hingga
dicapai sudut maksimum yang diinginkan.
15.8.1.2. Perencanaan Dengan Metoda Radius Of Curvature a. Perhitungan Secara Segmental
Metoda ini diperkenalkan oleh WILSON.G.J pada tahun 1968, yang merupakan perbaikan dari metoda tangensial.Tidak seperti pada metoda tangensial, perencanaan ini tidak me nganggap interval-interval lubang bor merupakan garis-garis lurus. Di dalam metoda ini, segmen lubang bor dianggap berupa busur suatu lingkaran yang bersifat menyinggung di titik awal dan akhir suatu interval lubang bor yang mempunyai sudut kemiringan dan sudut arah tertentu. Karena di dalam prakteknya, memang alat-alat pembelok seperti turbo drill, dyna drill dan lain-lain dapat menghasilkan lubang dengan belokan yang kontinyu (smooth), sehingga lebih tepat apabila segmen-segmen lubang bor dianggap berupa busur suatu lingkaran.
Di dalam perencanaannya pemboran berjalan pada suatu bidang datar dengan sudut arah tetap (Gambar 15.35).
Gambar 35. Penampang Vertikal Suatu Lubang Bor (Metoda ROC)
Apabila suatu bagian kecil interval lubang bor dM didalam gambar 15.35 kita perhatikan, maka akan didapatkan segmen kecil lubang bor.
180 x I ...(15-3) dimana :
I I = Sudut kemiringan, derajat
x
= Suatu sudut di dalam radial tetapi juga :M b
l ...(15.4) dimana :
b = Kecepatan sudut kemiringan, o/ft.
M = Jarak suatu titik M dari KOP, sehingga substitusi persamaan (15.4) ke (15.-3) didapat :
b
M
x
180
...(15.5) Dari gambar 16.35, apabila dM yang diambil sangat kecil, akan didapatkan :dM Cosx
dZ ...(15.6) Substitusi ke persamaan 5 didapatkan :
b
M
dM
dZ
cos
180
diintegrasi menjadi :
2
1
1 2Z
180
b
sin
b
180
M
sin
b
180
M
Z
atau :
2 1
1 2Z
180
b
sin
I
sin
I
Z
...(15.7) untuk titik di KOP, I1 0, sehingga :
2 12
Z
180
b
sin
I
Z
...(15.8) Arah horizontal sepanjang build up section (=H) dapat dilihat dari gambar 16.35, apabila interval dM sangat kecil maka :dM x
dH sin ...(15.9) Kemudian persamaan ini disubstitusi ke persamaan (15-5).
b
M
dM
dH
sin
180
x
...(15.10) Apabila diintegrasi akan didapatkan :
1 2
1
2
H
180
b
cos
I
cos
I
H
...(15.11) Untuk KOP, I1 0, sehingga :
2
1
2
H
180
b
1
cos
I
H
...(15.12) Perlu diingat bahwa :b I I MD MD 2 1 1 2 ...(15.13) Persamaan-persamaan di atas tetap berlaku untuk drop off section.
Apabila digunakan program komputer untuk perencanaan, maka dapat dipakai persamaan-persamaan 15.7, 15.11 dan 15.13, untuk menghitung TVD, MD dan Drift-nya.
b. Build-and-Hold Trajectory
Gambar 15.36 menunjukkan geometry build-and-hold trajectory,
Gambar 15.36. Build-and-Hold Type Well Path Untuk X3 < r19),23) dimana :
1
D : TVD kick of point, feet 2
3
D : TVD dasar sumur, feet
3
X : Horizontal departure, feet
q : Rate of inclination angle buildup, o /panjang
Radius of curvature, r1, adalah : 1
r =180 q1 ...(15.14) Maximum inclination angle, diperoleh dari
90 900 atau, ...(15.15) Dengan memperhatikan segitiga OAB, maka1 3 3 1 tan D D x r AO BA ...(15.16a) dan 1 3 3 1 arctan D D x r ...(15.16b) Dengan memperhatikan segitiga OBC, maka
OB r1 sin ...(15.17) dan
2 1 3 2 3 1 x D D r LOB Substitusi OB ke dalam persamaan 16-17 memberikan
2 1 3 2 3 1 1 sin D D x r r ...(15.18)Sudut inklinasi maximum untuk build-and-hold dimana x3 r1adalah :
1 3 3 1 2 1 3 2 3 1 1 arctan arcsin D D x r D D x r r ...(15.19)Panjang busur, DC, adalah
1
180 r
atau
B
LDC ...(15.20)
Panjang CB dapat ditentukan dari segitiga BCO
CB CB L r L CO 1 tan dan tan 1 r LCB
Total measured depth, , untuk TVD dari adalah
tan 1 1 r q D DM ...(15.21)
Horizontal departure dari buildup section dapat diperoleh dengan memperhatikan segitiga D'OC, dimana
1 cos cos 1 1 1 2 r r r x ...(15.22) Untuk menghitung measured depth dan horizontal departure serta TVDsepanjang build up section digunakan persamaan :
' sin 1 1 r D DN ...(15.23) Dan ) ' cos 1 ( ' cos 1 1 1 r r r xN ...(15.24)
TVD pada akhir build up section adalah
sin 1 1 2 D r D ...(15.25) Measured depth sepanjang build up section adalah :
q D
DMN 1 ...(15.26)
Measured depth pada setiap TVD D' ditentukan dari segitiga PP'C :
CP q D DMP 1 ...(15.27) dimana cos ' CP CP dan
' sin
'
' D D2 D D1 r1
CP
Oleh karena itu, cos sin ' D1 r1 D CP ...(15.28) Substitusi persamaan 28 ke dalam persamaan 27, menghasilkan :
cos sin ' 1 1 1 r D D q D DMP ...(15.29)
Horizontal departure pada titik P adalah :
P P x x' 2 ' ...(15.30) dimana tan ' 'P CP P
Menggabungkan persamaan 15.30, persamaan 15.22, dan CP' menghasilkan :
1 cos
' sin
tan' r1 D D1 r1
x ...(15.31) Penurunan persamaan di atas berlaku jika .x3 r1
Cara lain untuk menghitung sudut inklinasi maksimum
3 1 1 3 1 3 1 3 1 1
3 arccos sin arctan
arctan x r D D D D r x r D D
Untuk kasusx3 r1, persamaan untuk menghitung sudut inklinasi maksimum adalah: 1 3 1 3 1 3 1 1 3 1
3 arccos sin arctan
arctan 180 r x D D D D r r x D D
Contoh 1 :
Diinginkan membor suatu sumur di bawah danau dengan menggunakan directional drilling. Lintasan (trajectory) yang akan digunakan adalah build-and-hold trajectory. Horizontal departure antara target dengan titik bor adalah 2655 ft dan TVD 9650 ft. Rate of build up adalah 2.0/100 ft. Kedalaman kick off adalah 1600 ft.
Tentukan :
1. Radius of curvature 2. Sudut inklinasi maximum
3. Measured depth dari build up section 4. Total measured depth
5. Horizontal departure dari buildup section 6. Measured depth pada TVD 1915 ft
7. Horizontal displacement pada TVD 1915 ft 8. Measured depth pada TVD 7614 ft
c. Build-Hold-and-Drop (©Sª) Trajectory
Lintasan jenis ini ditunjukkan oleh gambar 15.37 untuk r1 x3 dan 4
2 1 r x
r , dan gambar 15..38 untuk r1 x3 dan r1r2 x4.Sudut inklinasi maksimum untuk kondisi r1r2 x4 ,
4 2 1 1 4 1 4 2 1 4 2 1 14
arccos
sin
arctan
arctan
x
r
r
D
D
D
D
r
r
x
r
r
D
D
...(15-33)Gambar 15.38. Build-Hold-and-Drop and Hold (Modified-S) dimana r1 < X3 dan r1 + r2 < X49),23)
Sedang sudut inklinasi maksimum untuk kondisi r1r2 x4,
2 1 4 1 4 1 4 2 1 2 1 4 14
arccos
sin
arctan
arctan
180
r
r
x
D
D
D
D
r
r
r
r
x
D
D
...(15.34) d. Build, Hold, Partial Drop, and Hold (Modified ©Sª Trajectory)Gambar 16.39 menunjukkan tipe ini. Panjang kurva LCA adalah:
q LCA ' dan ' sin 2 r LCB ...(15.35a)
untuk CO' B, maka dapat ditulis :
1 cos '
' cos 2 2 2 r r r sBA ...(15.35b)Persamaan 11-33 dan 11-34 dapat ditulis dengan mensubstitusi
' sin 2 5 r
D untuk D4 dan x5 r2
1cos'
untuk x4.Untuk tipe 'S' ini, perhitungan MD dan H dapat dilakukan seperti pada tipe Build - and - Hold.
Gambar 15.39. Build, Hold, Partial Drop dimana r1 < X3 dan r1 + r2 < X49),23) 15.8.1.3. Perencanaan X-Y Trajectory
Gambar 15.40 dan 15.41 menunjukkan trajektori vertical dan horizontal dari directional well, dimana :
2 cos 2 sin A A 1 A A 1 M D L ...(15.36) L = Panjang Utara/Selatan 2 sin 2 sin A A 1 A A 1 M D M ...(15.37) M = Panjang Timur/Barat
TVD dapat dihitung dengan
2 cos A A 1 M D D ...(15.38) dimana adalah pertambahan ©measured depthª.
Gambar 15.40. Trajektori Vertikal9)
Contoh 2:
Hitunglah Trajektori dari 8000 ke 8400 feet, dimana KOP pada 8000 feet dan Build-Up Rate adalah 1o/ 100 ft, dengan sudut lead 10o dengan Right-hand rate
adalah 1o/100 ft. Arah Anual adalah N 3oE.
Asumsi bahwa 200 ft pertama dipakai untuk mengarahkan sudut lead, dimana arah dibuat konstan sampai 8200 ft dan kemudian belok kanan dengan kecepatan 1o/100 ft.
15.9. Metoda-Metoda Perhitungan Hasil Survey Pemboran Berarah
Setelah perencanaan dibuat dan praktek pemboran terarah dilaksanakan, seperti telah diterangkan terdahulu, pada setiap kedalaman-kedalaman tertentu dilakukan pengukuran sudut kemiringan dan arah lubang bor (dilakukan survey). Apabila pada titik-titik survey tersebut terjadi penyimpangan, lubang bor diarahkan kembali ke arah yang telah ditetapkan.
Ada beberapa metoda yang dapat menentukan koordinat titik-titik survey ini. Berturut-turut akan dibicarakan metoda yang terdahulu hingga yang terbaru ditemukan, dimana masing-masing metoda mempunyai limitasi-limitasi tertentu di dalam menganalisa persoalan. Perlu diingatkan bahwa metoda yang ditemukan kemudian merupakan perbaikan dari metoda yang mendahuluinya.
Dalam rangka menganalisa persoalan, semua metoda yang akan dibicarakan mendasarkan perhitungannya kepada pengukuran 3 besaran yaitu kedalaman sumur (MD M ), perubahan sudut kemiringan ( I ) dan sudut arah ( A ) yang dicatat oleh alat-alat survey.
15.9.1. Metoda Tangential
Prinsip dari metoda ini adalah menggunakan sudut inklinasi dan azimuth dari titik awal interval untuk menghitung ©vertical depthª, ©departureª, dan posisi. Prinsip dari metoda tangential tersebut ditunjukkan oleh gambar 16.42 2 cos I MD VD 2 sin I MD H 2 2 2 sin sin sinA MD I A D E 2 2 2 sin cos cosA MD I A D N dimana : MD
: Pertambahan measured depth
VD
: Pertambahan TVD
H
: Pertambahan departure
N
: Pertambahan koordinat arah utara
E
Gambar 15.42. Tangential Method : (a) Vertical Section; (b) Plan View 36)
15.9.2. Metoda Balanced Tangential
Metoda ini membagi dua interval dimana untuk bagian atas interval digunakan sudut inklinasi dan azimuth pada titik awal interval dan untuk bagian bawah interval digunakan sudut inklinasi dan azimuth pada titik akhir interval. Prinsip dari metoda ini ditunjukkan oleh Gambar 15.43.
1 1 2 sinI MD D 2 2 sin 2 I MD D
1 2
2 1 sin sin 2 I I MD D D D 1 1 cos 2 I MD VD 2 2 cos 2 I MD VD Gambar 15.43. Balanced Tangential Method : (a) Vertical Section; (b) Plan View 36)
1 2
2 1 cos cos 2 I I MD VD VD VD 2 2 1 1 2 1 N D cosA D cosA N N
sin 1cos 1 sin 2cos 2
2 I A I A MD 2 2 1 1 2 1 E D sinA D sinA E E
= 2
sinI1sinA1 sinI2sinA2
MD
15.9.3. Metoda Angle Averaging
Prinsip dari metoda ini adalah menggunakan rata-rata sudut inklinasi dan rata-rata sudut azimuth dalam menghitung “vertical depth”, “departure”, dan posisi. Perhitungan dengan menggunakan metoda ini hampir sama dengan menggunakan metoda tangensial.
2 sin I1 I2 MD D 2 cos I1 I2 MD VD 2 sin 2 sin I1 I2 A1 A2 MD E
2 cos 2 sin I1 I2 A1 A2 MD N
15.9.4. Metoda Radius of Curvature
Metoda ini menganggap bahwa lintasan yang melalui dua station berbentuk kurva yang mempunyai radius of curvature tertentu. Prinsip perhitungan dengan menggunakan metoda ini ditunjukkan oleh Gambar 15.44.
2 1
1 2 sin sin 2 360 I I I I MD TVD
2 2
1 2 cos cos 2 360 I I I I MD H
2 1
2 1
2 1 2 2 1 2 4 sin sin cos cos 360 I I A A A A I I MD N
2 1
2 1
2 1 2 2 1 2 4 cos cos cos cos 360 I I A A A A I I MD E Gambar 15.45. Metode Minimum of Curvature36) 15.9.5. Metoda Minimum of Curvature
Persamaan metoda minimum of curvature hampir sama dengan persamaan metoda balanced tangential, kecuali data survey dikalikan dengan faktor RF . derajat Radian DL DL RF 2 tan 2 dimana : DL = dog-leg angle
2 1
sin
1sin
2
1
cos
2 1
cos
I
I
I
I
A
A
CosDL
I I
RF MD TVD cos 1 cos 2 2
I A I A
RF MDN sin 1cos 1 sin 2cos 2
2
I A I A
RF MDE sin 1sin 1 sin 2sin 2
2
15.9.6. Metoda Mercury
Metoda mercury adalah perbaikan dari metoda balanced tangential dengan memasukkan faktor koreksi panjang dari alat survey yang dipergunakan.
cos 2 cos 1
cos 2 2 I I STL I STL MD TVD
sin 1cos 1 sin 2cos 2
sin 2 cos 22 I A I A STL I A STL MD N
sin 1sin 1 sin 2sin 2
sin 2 sin 22 I A I A STL I A STL MD E dimana :
STL adalah panjang peralatan survey. Contoh 3 :
Buatlah evaluasi Trajektori Pemboran dari data survey sbb :
MD Inklinasi Arah 7100 0 0 7200 10,1 S 68o W 7300 13,4 S 65o W 7400 16,3 S 57o W 7500 19,6 S 61o W
Hitunglah menggunakan metoda: Hitunglah menggunakan metoda :
a. Tangential
b. Balanced Tangential c. Angle Averaging d. Radius of Curvature e. Minimum of Curvature
Contoh 4:
1. Perancangan Pemboran MiringPerencanaan pemboran miring dilaksanakan berbentuk "Build and Hold" terhadap suatu target dengan kedalaman TVD 8000 feet, Posisi target North (N) 1181 feet dan East (E) 845 feet. Peralatan BHA yang dipakai akan menghasilkan kecepatan pembentukan sudut kemirian (BUR) sebesar 1o / 100 ft, dimana pembentukan lengkungan pertama (KOP) pada kedaaman pemboran (MD) 3000 feet.
Buatlah rencana lintasan (Trajectory) serta urutan-urutan perhitungannya, dan isilah tabel berikut:
MD(feet) Inklinasi (I, o) TVD (feet) Displacement (H, feet) 0 0 0 0 1000 ……… ……… ……… 2000 ……… ……… ……… 3000 (KOP) ……… ……… ……… 4000 ……… ……… ……… 5000 ……… ……… ……… 6000 ……… ……… ……… 7000 ……… ……… ……… 8000 ……… ……… ……… ……… ……… ……… ………
2. Evaluasi Trajektori Pemboran Miring Tentukanlah jarak displacement (H) dan arah akhir (N-E) untuk setiap Measure Depth (MD) dengan metoda Balanced Tangential. Berikanlah contoh secara lengkap tentang perhitungannya: Depth (MD) (feet) Inclination (Degrees) Direction Departure (H) (feet) Final Direction (N-E) 5000 (KOP) 0 N 0oE 0 N 0oE 5100 1.0 N 10oE 5500 2.5 N 12oE 6000 3.5 N 5 oW 7000 5.0 N 15oW 8000 3.0 N 35oW
3. Perancangan Pemboran MiringPerancangan pemboran miring dilakukan berbentuk "Return to Vertical" terhadap suatu target dengan kedalaman TVD 8000 feet, Posisi target North (N) 1311 feet dan East (E) 1511 feet. Peralatan BHA yang dipakai akan menghasilkan kecepatan peningkatan sudut
kemiringan (BUR) sebesar 1o / 100 ft dan penurunan sudut sebesar 2o / 100 ft, dimana pembentukan lengkungan pertama (KOP) pada kedalaman pemboran (MD) 2100 feet.Buatlah rencana lintasan (Trajectory) serta urutan-urutan perhitungannya, dan isilah tabel berikut dengan selang MD 1000 feet, dan dilengkapi titik SURFACE, KOP, EOB, EOT, EOD:
MD (feet) Inklinasi (Io) TVD (feet) Displacement (H, feet)
0 (Surface) 0 0 0
... ... ... ... ... ... ... ... ... ... ... ...
QUIZ
1. Jelaskan dengan singkat!
a. Alasan-alasan dilaksanakannya pemboran berarah b. Penyebab belokan selama pemboran
c. Jenis Pemboran berarah 2. Sebutkan :
a. Alat-alat pembelokan sumur, dan jelaskan prinsip kerjanya! b. Alat-alat survey!
c. Alat-alat Bottom Hole Assembly!
3. Sebutkan dan jelaskan metoda yang digunakan dalam pengarahan lubang, gambarkan!
4. Jelaskan dengan Singkat apa yang dimaksud :
a. KOPb. TVDc. Measured Depthd. Inklinasie. Azimuthf. Displacementg. Doglegh. Dogleg Severityi. MPDLS
Buat sketsa gambar untuk memperjelas penjelasan anda!Dari manakah data-data tersebut diatas diperoleh!
5. a. Sebutkan tujuan dilakukannya survey pada pemboran berarah! 5 b. Metode-metode apakah yang dipakai dalam menganalisa titik survey! 6. Masalah-masalah apakah yang sering timbul dalam pemboran berarah,
jelaskan!
7. Sebutkan dan gambarkan peralatan yang dipakai untuk pertama kali membelokan sumur (membentuk KOP)!
8. Prinsip apa dan terangkan cara-cara untk memperbesar, menetapkan dan memperkecil sudut inclinasi!
9. Jelaskan 5 (lima) metoda perhitungan penentuan letak sumur pada direc-tional drilling yang utama!
DAFTAR PARAMETER DAN SATUAN
A = Azimuth, derajat
b = Kecepatan sudut kemiringan, o/ft
D = Jarak vertical, feet
DL = Sudut dogleg, derajat
DM = Total measured depth, feet
DN = Measured depth hingga build up section, feet
q = Rate of inclination angle, build up/panjang
= Sudut inklinasi maksimum, derajat
Z = Ketinggian sebenarnya suatu interval, feet
H = Horizontal departure, feet
I = Inklinasi, derajat
L = Panjang utara/selatan, feet
X = Jarak horizontal, feet
KOP = Kick of point
M = Jarak suatu titik M dari KOP / panjang timur/barat, feet
MD = Measured depth, feet
r
= Jari-jari kelengkungan lubang , feetE
= Pertambahan koordinat arah timur , feet
H
= Pertambahan horizontal departure , feet
MD
= Pertambahan measured depth , feet
N
= Pertambahan koordinat arah utara , feet
TVD
= Pertambahan TVD , feet
I
= Sudut inklinasi, derajat
= Inklinasi, derajatDAFTAR PUSTAKA
1. Alliquander, "Das Moderne Rotarybohren", VEB Deutscher Verlag Fuer Grundstoffindustrie,Clausthal-Zellerfeld, Germany, 1986
2. Mian M.A., "Petroleum Engineering Handbook for Practicing Engineer", Vol.2, Penn Well Publishing Company, Tulsa-Oklahoma, 1992.
3. Aguilera R., "Horizontal Wells: Formation Evaluation, Drilling, and Production, Including Heavy Oil Recovery", Gulf Publishing Company, Houston, 1991.
4. Short J., "Introduction to Directional And Horizontal Drilling", Penn Well Publishing Company, Tulsa, 1993.
5. Azar J.J., "Drilling in Petroleum Engineering", Magcobar Drilling Fluid Manual. 6. Gatlin C., "Petroleum Engineering: Drilling and Well Completions", Prentice Hall
Inc., Englewood Cliffs, New Jersey, 1960.
7. nn., "Drilling", SPE Reprint Series no. 6a., SPE of AIME, Dallas-Texas, 1973. 8. Bourgoyne A.T. et.al., "Applied Drilling Engineering", First Printing Society of
Petroleum Engineers, Richardson TX, 1986.
9. Moore P.L., "Drilling Practices Manual", Penn Well Publishing Company, First Edition, Tulsa-Oklahoma, 1974.
10. Moore P.L., "Drilling Practices Manual", Penn Well Publishing Company, Second Edition, Tulsa-Oklahoma, 1986.
11. McCray A.W., Cole F.W., "Oil Well Drilling Technology", The University of Oklahoma Press,1979.
12. Rabia. H., "Oil Well Drilling Engineering : Principles & Practice", University of Newcastle upon Tyne, Graham & Trotman, 1985.