29 BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dijelaskan pengujian dari sensor yang digunakan, dan kemudian akan dilakukan analisis dari data yang didapat tersebut. Pengujian ini bertujuan untuk mengetahui data-data yang dikeluarkan oleh setiap sensor, yang nantinya digunakan untuk melakukan perhitungan dari data yang didapat
4.1. Pengujian Sensor Vehicles Speed
Sensor Vehicles Speed akan mengeluarkan sinyal apabila magnet yang terdapat pada sensor terkena gerigi besi yang berada pada poros roda.
Dengan menghitung jumlah sinyal yang dikeluarkan oleh sensor maka bisa didapatkan jarak yang telah ditempuh oleh kendaraan. Hal ini bisa didapat dengan menggunakan rumus sebagai berikut:
= � × , (2)
Dengan:
s = Jarak Tempuh (cm)
n = Jumlah sinyal
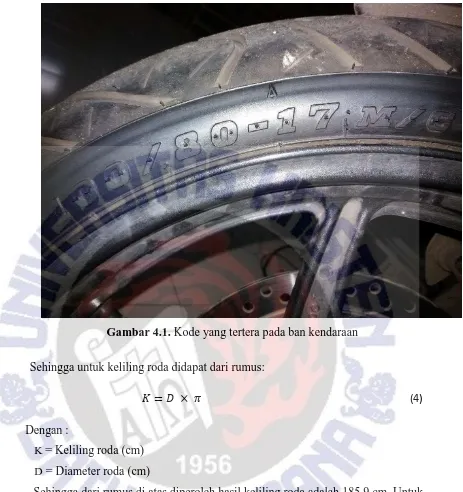
23,2 cm merupakan jarak untuk 1 sinyal pulsa yang dihasilkan oleh sensor Vehicles Speed. Dimana angka ini didapat dari:
30
Gambar 4.1. Kode yang tertera pada ban kendaraan
Sehingga untuk keliling roda didapat dari rumus:
� = � × � (4)
Dengan :
K = Keliling roda (cm) D = Diameter roda (cm)
Sehingga dari rumus di atas diperoleh hasil keliling roda adalah 185,9 cm. Untuk 1 putaran roda dari hasil pengujian didapat sinyal dari sensor sebanyak 8 buah sinyal.
31
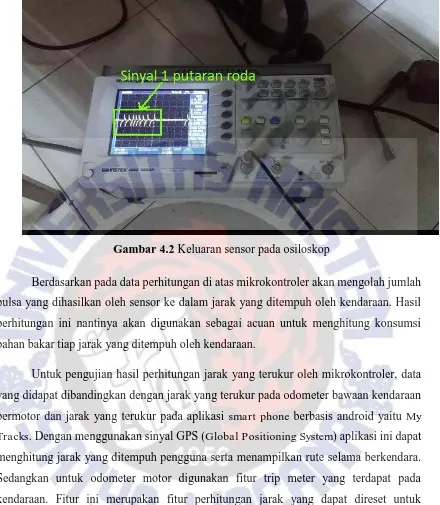
Gambar 4.2 Keluaran sensor pada osiloskop
Berdasarkan pada data perhitungan di atas mikrokontroler akan mengolah jumlah pulsa yang dihasilkan oleh sensor ke dalam jarak yang ditempuh oleh kendaraan. Hasil perhitungan ini nantinya akan digunakan sebagai acuan untuk menghitung konsumsi bahan bakar tiap jarak yang ditempuh oleh kendaraan.
Untuk pengujian hasil perhitungan jarak yang terukur oleh mikrokontroler, data yang didapat dibandingkan dengan jarak yang terukur pada odometer bawaan kendaraan
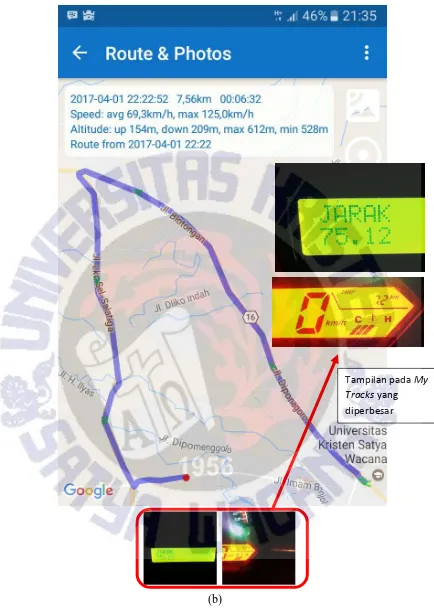
bermotor dan jarak yang terukur pada aplikasi smart phone berbasis android yaitu My Tracks. Dengan menggunakan sinyal GPS (Global Positioning System) aplikasi ini dapat menghitung jarak yang ditempuh pengguna serta menampilkan rute selama berkendara. Sedangkan untuk odometer motor digunakan fitur trip meter yang terdapat pada kendaraan. Fitur ini merupakan fitur perhitungan jarak yang dapat direset untuk menghitung jarak yang ditempuh oleh kendaraan dalam km.
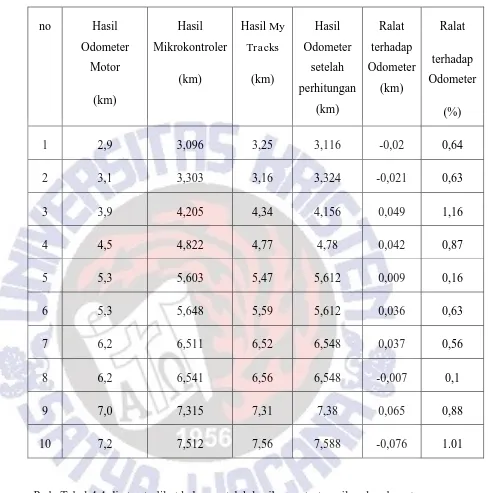
Untuk data hasil perbandingan antara perhitungan dari mikrokontroler, odometer bawaan dari sepeda motor dan aplikasi My Tracks dapat dilihat dari Tabel 4.1 dan Gambar 4.3.
32
(a)
33 (b)
Gambar 4.3. (a) dan (b) Contoh tampilan hasil perhitungan jarak serta jalur yang ditempuh dengan menggunakan aplikasi My Tracks serta hasil dari alat dan
odometer motor
34
Tabel 4.1. Hasil pengukuran jarak
no Hasil
Pengujian perhitungan jarak dilakukan dengan cara pengambilan sampel data sebanyak 10 kali dengan jarak tempuh dan rute yang berbeda. Selain itu selama pengambilan data rata-rata kecepatan kendaraan berubah-ubah. Pengujian pengukuran jarak dilakukan dengan mengkombinasikan kecepatan tinggi dan kecepatan rendah. Hal ini terlihat pada perbandingan Gambar 4.3 (a) dan (b) dimana kecepatan rata-rata dan kecepatan maksimal dapat dilihat pada gambar.
35
menghitung jumlah total sinyal yang dihasilkan oleh sensor Vehicles Speed. Sedangkan semakin tinggi kecepatan putaran roda (kecepatan kendaraan) maka frekuensi yang dihasilkan oleh sensor akan semakin besar pula. Maka dilakukan pengujian dalam kecepatan tinggi untuk mengecek ada tidaknya pengaruh frekuensi keluaran sinyal dalam kecepatan tinggi.
Untuk analisa perbandingan hasil perhitungan antara pengujian alat dengan odometer motor dan alat dengan aplikasi My Tracks dilakukan secara terpisah karena diperlukan pengujian lebih lanjut untuk mengetahui penyebab perbedaan ralat antara alat
dengan odometer motor yang tehitung cukup besar yaitu hingga 0,348km. Dan dikarenakan tampilan pada odometer motor hanya sampai 1 angka dibelakang koma. Sehingga ketelitian data yang ditampilkan berbeda bila dibandingkan dengan alat yang sampai 3 angka dibelakang koma.
Untuk analisa perhitungan data yang didapat antara alat dengan aplikasi My Tracks, berdasarkan dari data yang didapat terlihat bahwa alat masih dapat berjalan normal dikondisi kendaran dalam keadaan kecepatan tinggi. Hal ini terlihat dari data yang didapat hasil perhitungan masih mendekati perhitungan dari aplikasi MyTracks. Untuk ralat maksimal pengujian alat dengan aplikasi MyTrack adalah 0,154km atau 4,97%. Sedangkan rata-rata ralatnya adalah 0,0756km, atau sebesar 1,74%.
36
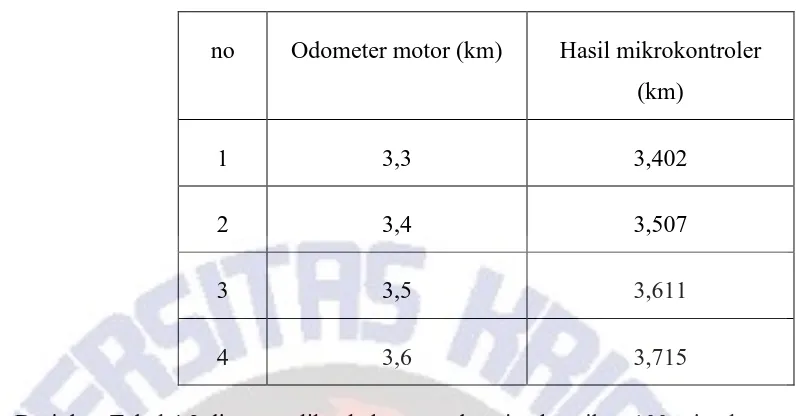
Tabel 4.2. Hasil pengukuran alat dengan odometer motor tiap 100m
no Odometer motor (km) Hasil mikrokontroler (km)
1 3,3 3,402
2 3,4 3,507
3 3,5 3,611
4 3,6 3,715
Dari data Tabel 4.2 di atas terlihat bahwa untuk setiap kenaikan 100m jarak yang terukur pada odometer motor, jarak yang terukur pada alat mengalami kenaikan kurang lebih sebesar 104m. Dimana dari data di atas terlihat bahwa saat odometer motor naik sebesar 300m jarak yang terukur pada alat naik sebesar 313m.
Dengan menggunakan persamaan (2) dapat dihitung jumlah sinyal total yang terukur pada alat yaitu:
� = , cm
Dengan:
s = 31300 cm
Sehingga didapat sinyal total yang terbaca oleh alat 1349,873 buah sinyal. Untuk menghitung beda perhitungan data untuk tiap sinyal bisa didapat dari pembagian beda perhitungan jarak odometer dengan alat (beda perhitungan 1300cm) dengan jumlah sinyal total yang terhitung oleh alat. Didapatkan 0,96 beda jarak yang terukur untuk 1 buah sinyal. Sehingga didapat variabel pengali pada odometer motor untuk tiap 1 sinyal adalah 23,2 – 0,96 = 22,24 cm.
Dengan menggunakan persamaan (3) dan (4) maka dapat dihitung diameter roda
37
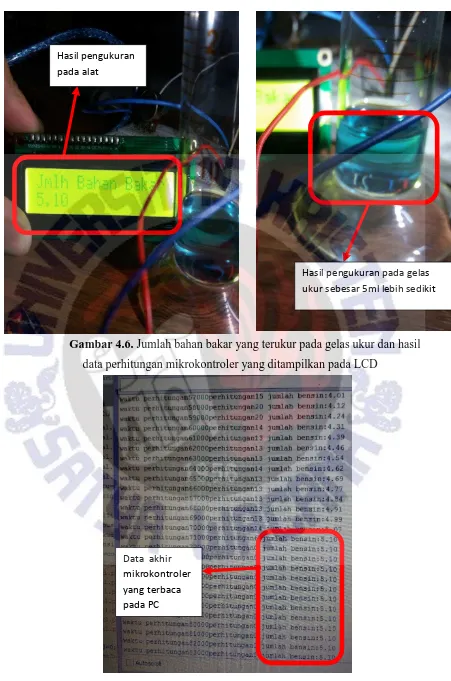
sebagai acuan perhitungan pada odometer motor adalah 100/70. Sepeda motor yang digunakan adalah New CBR150R(Thailand), untuk spesifikasi lengkap dari sepeda motor yang digunakan dapat dilihat pada Tabel 4.3.
Tabel 4.3. Spesifikasi motor yang digunakan sebagai alat uji [9]
Selain perbedaan variabel pengali antara odometer kendaraan dengan alat yang dibuat, pada odometer motor saat fitur trip meter direset, fitur ini akan mulai menghitung data sensor setelah kendaraan berjalan sejauh 100m. sehingga untuk membandingkan hasil akhir pembacaan odometer motor dengan alat yang dibuat perlu dilakukan perhitungan
J = Jt + dl + (Jt /0,1) ×0,004 (5)
Dengan:
J = Jarak
Jt = Jarak terukur (km)
dl = Delay trip meter=0,1km
Setelah dilakukan perhitungan diatas pada data tabel 4.1 semua data yang didapat
38
Tabel 4.4. Hasil pengukuran odometer setelah dilakukan perhitungan
no Hasil
Pada Tabel 4.4 di atas terlihat bahwa setelah hasil yang tertampil pada odometer kendaraan diolah dengan menggunakan perhitungan yang telah didapat maka hasil pada odometer dibandingkan dengan alat memiliki ralat terbesar 1,16%. Sedangkan untuk rata-rata ralatnya adalah sebesar 0,66%.
4.2. Pengujian Injecor
Pada pengujian injector ini pertama yang dilakukan adalah mengecek perbedaan sinyal yang dikirimkan oleh ECU ke injector untuk setiap kondisi kendaraan. Injector
39
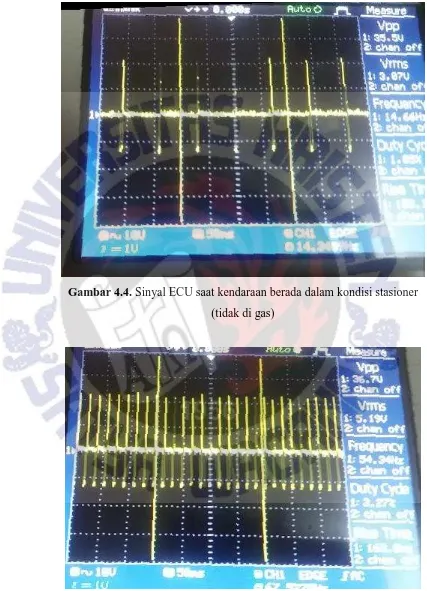
perbedaan sinyal yang dikirimkan ECU ke injector untuk setiap kondisi kendaraan dapat dilihat dari Gambar 4.4 dan Gambar 4.5 dibawah ini.
Gambar 4.4. Sinyal ECU saat kendaraan berada dalam kondisi stasioner (tidak di gas)
40
Dari Gambar 4.4 dan Gambar 4.5 terlihat bahwa perbedaan sinyal yang dikirimkan oleh ECU ke injector pada saat stasioner (gas tidak menyala) dengan pada saat gas menyala hanya terletak pada jumlah frekuensi sinyal saja. Pada kondisi gas menyala frekuensi sinyal yang dikirimkan oleh ECU lebih besar sehingga injector akan lebih banyak menyemprotkan bahan bakar ke mesin kendaraan guna mendapatkan tenaga lebih untuk mesin.
Sedangkan untuk besaran tegangan yang dikirimkan oleh ECU relatif sama yaitu berkisar antara 12Vrms. 12Vrms ini merupakan tegangan yang dibutuhkan oleh injector
untuk berada pada kondisi ON. Sehingga injector akan terbuka dan menyemprotkan bahan bakar ke mesin kendaraan.
Dengan menggunakan mikrokontroler dapat dihitung jumlah sinyal yang dikeluarkan oleh ECU ke injector, sehingga dapat diketahui jumlah bahan bakar yang dikeluarkan oleh injector dengan cara mengkalikan sinyal dengan bahan bakar yang disemprotkan untuk 1 buah sinyal.
Untuk mengetahui bahan bakar yang disemprotkan oleh injector untuk 1 buah sinyal dilakukan dengan cara melakukan sebuah percobaan, yaitu dengan cara memberikan tegangan DC 12V langsung ke injector selama beberapa detik. Dan dihitung jumlah bahan bakar yang dikeluarkan oleh injector. Sehingga nanti dapat dihitung keluaran bahan bakar yang disemprotkan injector untuk 1 sinyal masukan dari ECU. Dimana diketahui 1 sinyal ECU sebesar 1ms.
41
Tabel 4.5. Hasil pengukuran keluaran injector
Percobaan Waktu
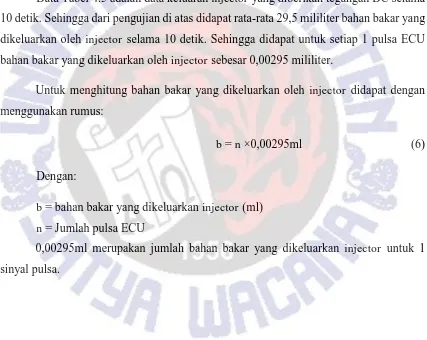
Data Tabel 4.5 adalah data keluaran injector yang diberikan tegangan DC selama 10 detik. Sehingga dari pengujian di atas didapat rata-rata 29,5 mililiter bahan bakar yang dikeluarkan oleh injector selama 10 detik. Sehingga didapat untuk setiap 1 pulsa ECU bahan bakar yang dikeluarkan oleh injector sebesar 0,00295 mililiter.
Untuk menghitung bahan bakar yang dikeluarkan oleh injector didapat dengan menggunakan rumus:
b = n ×0,00295ml (6)
Dengan:
b = bahan bakar yang dikeluarkan injector (ml)
n = Jumlah pulsa ECU
42
Gambar 4.6. Jumlah bahan bakar yang terukur pada gelas ukur dan hasil data perhitungan mikrokontroler yang ditampilkan pada LCD
Gambar 4.7. Data dari mikrokontroler yang dibaca pada PC Hasil pengukuran
pada alat
Hasil pengukuran pada gelas ukur sebesar 5ml lebih sedikit
43
Pada Gambar 4.7 waktu perhitungan merupakan lama pengambilan sampel dalam milidetik, perhitungan merupakan sinyal dari ECU untuk tiap detik sedangkan jumlah bensin adalah perhitungan bahan bakar yang dikeluarkan oleh injector oleh mikrokontroler.
Tabel 4.6. Pengujian volume bahan bakar secara keseluruhan
Percobaan Volume yang terukur pada terlihat bahwa perhitungan yang dilakukan oleh mikrokontroler telah sesuai dengan keluaran bahan bakar yang dikeluarkan oleh injector yang diukur dengan menggunakan gelas ukur. Dikarenakan ralat terbesar yang didapat adalah 0,9% sedangkan ralat rata-ratanya adalah 0,4%. Dimana gelas ukur yang dipakai sebagai pembanding memiliki ralat
0,1ml, sedangkan terlihat pada tabel ralat perhitungan yang dilakukan oleh mikrokontroler tidak ada yang melebihi 0,1ml. Sehingga bisa dikatakan hasil perhitungan
pada mikrokontroler telah sesuai dengan bahan bakar yang dikeluarkan oleh injector.
4.3. Pengujian Sensor Pelampung Bensin
44
ke tangki. Hasil pengukuran dari keluaran sensor apung bensin dapat dilihat dari grafik Gambar 4.8 dan Gambar 4.9.
Gambar 4.8. Grafik hasil pengukuran sensor apung
Gambar 4.9. Grafik rata-rata keluaran sensor apung 0
45
Data dari sensor ini digunakan untuk mengecek jumlah bahan bakar yang terdapat pada tangki kendaraan. Selain itu data sensor ini digunakan untuk mengecek apabila terjadi kesalahan perhitungan data yang dilakukan oleh mikrokontroler
4.4. Pembahasan dan Analisis
Dengan data yang diperoleh dari tiap sensor di atas selanjutnya data-data tersebut akan diolah oleh mikrokontroler sebagai dasar perhitungan untuk menentukan sisa bahan bakar pada tangki kendaraan serta menentukan sisa jarak tempuh yang dapat dilalui oleh kendaraan.
Data sisa bahan bakar yang terdapat pada tangki kendaraan didapat dengan rumus sebagai berikut
� = y–b (7)
Dengan:
Y = Sisa bahan bakar sekarang (ml)
y = Sisa bahan bakar sebelumnya (ml)
b = Bahan bakar yang dikeluarkan oleh injector(ml)
Dengan mengurangi jumlah sisa bahan bakar pada tangki dengan bahan bakar
yang dikeluarkan oleh injector yang didapat dari persamaan (6), maka akan diketahui sisa bahan bakar yang terdapat pada tangki bahan bakar sekarang.
Sedangkan untuk menghitung sisa jarak tempuh yang dapat dilalui oleh kendaraan dapat dicari dengan rumus sebagai berikut:
J = Y × l (8)
Dengan:
J = Sisa jarak yang dapat di tempuh kendaraan (km)
Y = Sisa bahan bakar sekarang (l)
l = Jarak tempuh untuk tiap 1 liter bahan bakar (km/l)
nilai l dapat kita cari dengan menggunakan persamaan (2) yaitu jarak tempuh kendaraan dibagi dengan jumlah bahan bakar yang dikeluarkan oleh injector dalam persamaan (6). Untuk lebih jelasnya dapat dilihat pada rumus di bawah
46 Dengan:
l = jarak tempuh untuk tiap 1 liter bahan bakar (km/l)
s = jarak yang di tempuh oleh kendaraan (km)
b = bahan bakar yang di keluarkan oleh injector (l)
Untuk pengujian perhitungan sisa jarak tempuh dapat dilihat pada Tabel 4.7 dan Gambar 4.10 sampai dengan Gambar 4.13.
Gambar 4.10. Rute pengambilan data 0,5 Liter pertama. Panah menunjukan waktu pengambilan gambar, kecepatan rata-rata dan jarak yang di tempuh dari
47
48
Gambar 4.12. Rute pengambilan data 0,5 liter ke tiga. Panah menunjukan waktu pengambilan gambar, kecepatan rata-rata dan jarak yang di tempuh dari
49
50
Tabel 4.7. Hasil pengujian pengambilan data perhitungan sisa jarak tempuh
Sisa jarak
Data 0,5 liter pertama dengan total jarak 14,6km
11,82
3,57 15,39 0,79 5,41
Data 0,5 liter kedua dengan total jarak 15,1km
13,85
Data 0,5 liter ketiga dengan total jarak 13,6km
7,68
Pengujian sisa jarak tempuh dilakukan dengan cara menempuh rute total 43,3km dengan total waktu pengambilan data hampir 1 jam. Pengambilan data ini dibagi
menjadi 3 tahap yang dibagi tiap 0,5 liter konsumsi bahan bakar. Hal ini dapat dilihat pada gambar pengambilan data Gambar 4.10. sampai dengan Gambar 4.12. Dimana
51
tempuh yang terukur dengan jarak yang ditempuh oleh kendaraan. Hasil pengambilan data secara keseluruhan dapat dilihat pada Tabel 4.7.
Dari tabel yang didapat terlihat bahwa ralat maksimal dari sisa jarak yang terukur pada alat adalah sebesar 1,26km. Dengan rata-rata ralat untuk semua sampel data adalah 0,691km. Ralat terbesar terukur pada rute ketiga dikarenakan rute yang ditempuh merupakan rute campuran antara jalan antar kota dengan jalan pedesaan, sehingga kendaraan sering melakukan pengereman dan akselerasi yang mempengaruhi konsumsi bahan bakar km/l rata-rata yang terukur.

![Tabel 4.3. Spesifikasi motor yang digunakan sebagai alat uji [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3725006.1480917/9.595.101.556.183.532/tabel-spesifikasi-motor-yang-digunakan-sebagai-alat-uji.webp)