44
BAB IV
PENGUJIAN DAN ANALISA SISTEM
Dalam bab ini penulis akan mengungkapkan dan menguraikan mengenai persiapan komponen – komponen dan peralatan yang digunakan serta langkah-langkah praktek, kemudian menyiapkan data hasil pengukuran yang didapat dari hasil pengukuran. Pelaksanaan pendataan dengan menggunakan sebuah rangkaian dan dilakukan secara berulang-ulang supaya dihasilkan data yang benar-benar tepat. Sebelum melakukan pendataan terlebih dahulu mempelajari alat tersebut kemudian menentukan titik pengukuran. Adapun hasil pendataan ini akan dijadikan pembanding dengan teori yang menunjang.
4.1 Persiapan Perangkat Keras dan Perangkat Lunak
Sebelum membuat rangkaian yang akan digunakan sebagai pendataan bahan ilmiah, terlebih dahulu mempersiapkan alat yang diperlukan sebagai penunjang pada saat melakukan pengujian pada rangkaian. Adapun alat dan bahan yang diperlukan adalah sebagai berikut :
1. Satu buah easyVR
2. Kabel USB (Universal Serial Bus) 3. Arduino UNO R3
4.2 Pengujian Setiap Blok
Sebelum melaksanakan pendataan pada rangkaian terlebih dahulu memeriksa hubungan-hubungan pada rangkaian. Langkah selanjutnya adalah menentukan test point untuk pengujian pada rangkaian yang akan didata. Adapun proses pengujian yang dilakukan adalah sebagai berikut :
4.2.1 Input Perintah EasyVR
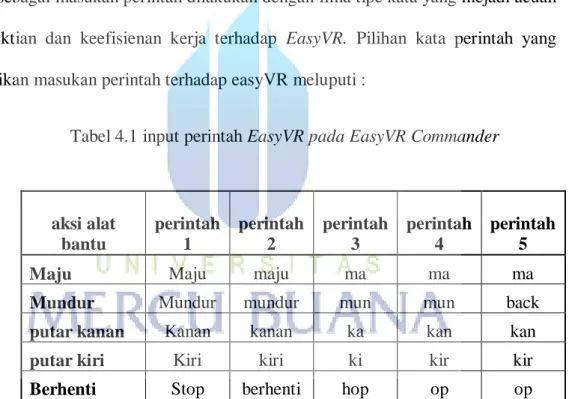
EasyVR akan diberikan masukan kata sebagai inisial pemanggilan perintahm dengan memanfaatkan perangkatluak EasyVR Commander. Pengujian kata sebagai masukan perintah dilakukan dengan lima tipe kata yang mejadi acuan keefektian dan keefisienan kerja terhadap EasyVR. Pilihan kata perintah yang dijadikan masukan perintah terhadap easyVR meluputi :
Tabel 4.1 input perintah EasyVR pada EasyVR Commander
aksi alat bantu perintah 1 perintah 2 perintah 3 perintah 4 perintah 5
Maju Maju maju ma ma ma
Mundur Mundur mundur mun mun back
putar kanan Kanan kanan ka kan kan
putar kiri Kiri kiri ki kir kir
Setelah input atau masukan perintah telah terekam dalam memori EasyVR, tahap selanjutnya adalah pengujian input atau masukan yang terekam melalui EasyVR Commander.
Pada tahap ini dilakukan pengujian masing-masing tipe input atau masukan yang berjumlah lima tipe sesuai dengan tabel 4.1. data pengujian adalah sebagai berikut :
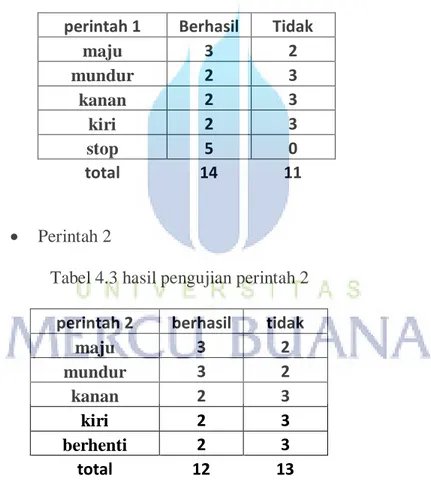
Perintah 1
Tabel 4.2 hasil pengujian perintah 1
perintah 1 Berhasil Tidak
maju 3 2 mundur 2 3 kanan 2 3 kiri 2 3 stop 5 0 total 14 11 Perintah 2
Tabel 4.3 hasil pengujian perintah 2
perintah 2 berhasil tidak
maju 3 2 mundur 3 2 kanan 2 3 kiri 2 3 berhenti 2 3 total 12 13
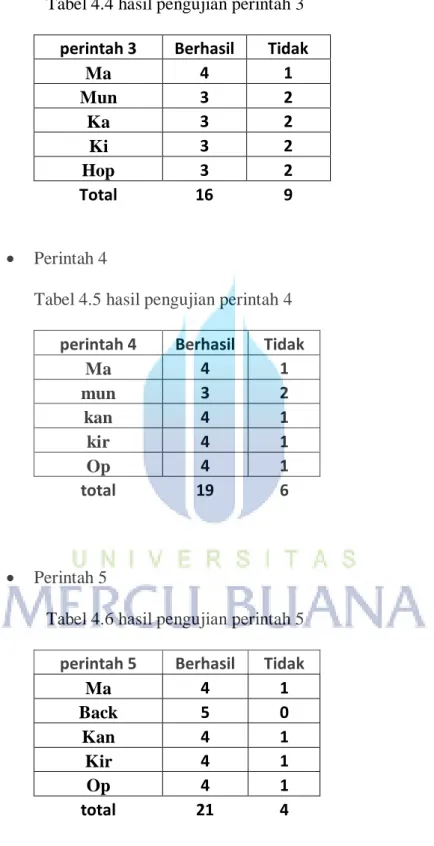
Perintah 3
Tabel 4.4 hasil pengujian perintah 3
perintah 3 Berhasil Tidak
Ma 4 1 Mun 3 2 Ka 3 2 Ki 3 2 Hop 3 2 Total 16 9 Perintah 4
Tabel 4.5 hasil pengujian perintah 4
perintah 4 Berhasil Tidak
Ma 4 1 mun 3 2 kan 4 1 kir 4 1 Op 4 1 total 19 6 Perintah 5
Tabel 4.6 hasil pengujian perintah 5
perintah 5 Berhasil Tidak
Ma 4 1 Back 5 0 Kan 4 1 Kir 4 1 Op 4 1 total 21 4
Data diatas merupaskan hasil pengujian kelima tipe masukan perintah terhadap EasyVR melalui EasyVR Commander. Setelah mendapatkan hasil masukan perintah yang paling tinggi, yaitu tpe perintah 5 langkah berikutnya adalah proses pemograman pada arduino IDE menggunakan hasil diatas sebagai acuan pemangilan atau pemberian perintah terhadap alat bantu.
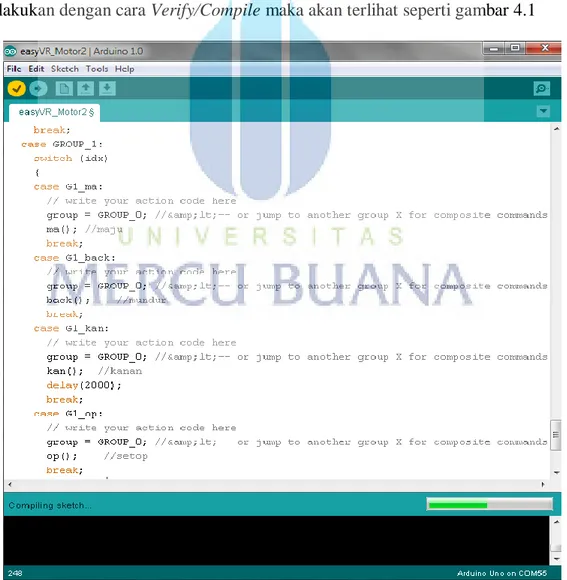
4.2.2 Pengujian Program Arduino IDE
Pengujian ini bertujuan untuk mengetahui apakah secara aplikasi program Arduino IDE (Integrated Development Environment) yang akan di upload ke Arduino UNO R3 sudah benar atau perlu adanya perbaikan. Pengujian ini dilakukan dengan cara Verify/Compile maka akan terlihat seperti gambar 4.1
Setelah proses compile berjalan dengan baik langkah selanjutnya adalah melakukan upload program dengan cara menghubungkan Arduino UNO R3 ke komputer menggunakan kabel USB, lalu klik upload para program IDE Arduino. Namun sebelum melakukan upload program, kita harus melakukan pengecekan port berapa yang digunakan oleh Arduino UNO R3 dengan cara Start/My Computer/Properties/Hardware/Device Manager/ports (COM & LPT), kemudian lakukan penyesuaian pada Serial port di IDE Arduino. Setelah itu baru bisa dilakukan proses upload program. Bila proses upload berhasil maka akan terlihat seperti pada gambar 4.2.
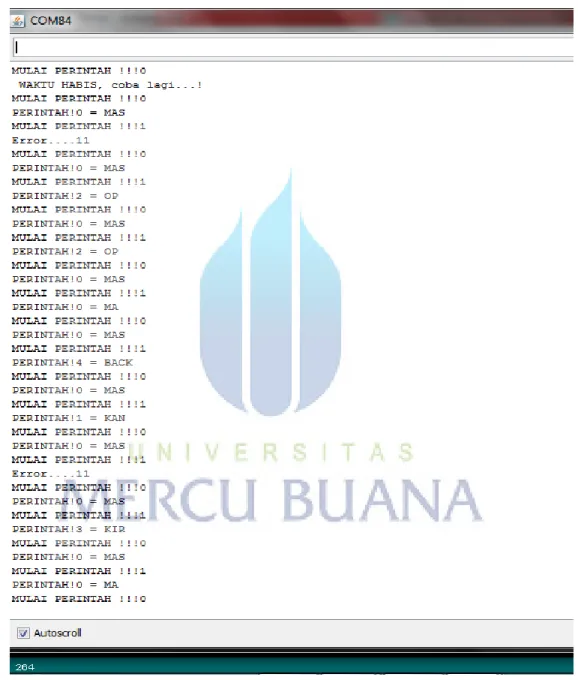
Setelah proses Upload selesai maka dilakukan pengetesan keluaran dari serial monitor yang merupakan hasil pembacaan perintah oleh user yang telah terekam pada EasyVR. Lakukan pengecekan di menu Tools kemudian pilih Serial Monitor. Maka akan muncul seperti gambar 4.3
Gambar 4.3 Tampilan Keluaran pembacaan perintah Melalui Menu Serial Monitor
4.2.3 Pengujian Frekuensi Kerja Ideal
Pada program diatur sebelum user melakukan pemanggilan inisial “mas” melalui suara akan muncul pada serial monitor “mulai perintah”. Setelah pemanggilan inisial selesai, tampilan berikutnya yang muncul adalah perintah yang diperintahkan dari salah satu perintah pada tipe perintah 5, antara lain : “ma”,”back”,”kan”,”kir”,”op”. batas waktu pemanggilan adalah 5 detik, apabila batas waktu habis, pada serial monitor tertera kalimat ”waktu habis” dan apabila masukan perintah yang diberikan salah, maka akan tertera “error”.
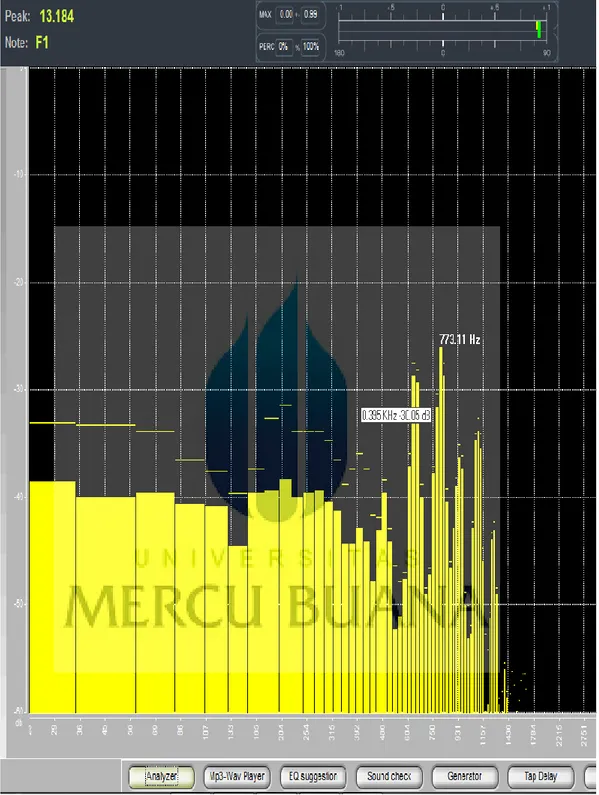
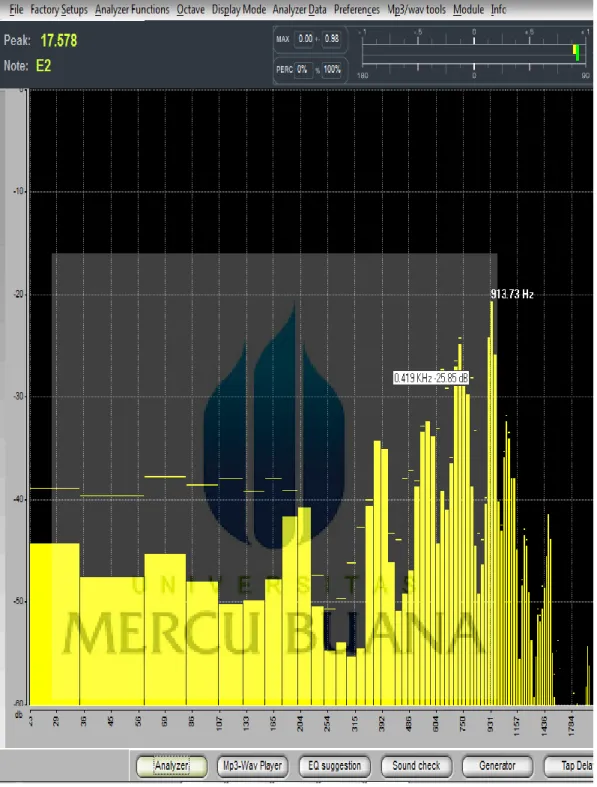
Setelah mendapatkan hasil pegnujian perintah melalui EasyVR Commander. Perlu adanya pengujian frekuensi kerja pada setiap perintah yang mempunyai presentase tertnggi pada pengujian sebelumnya. Pengujian tersebut meliputi :
Frekuensi perintah “ma”
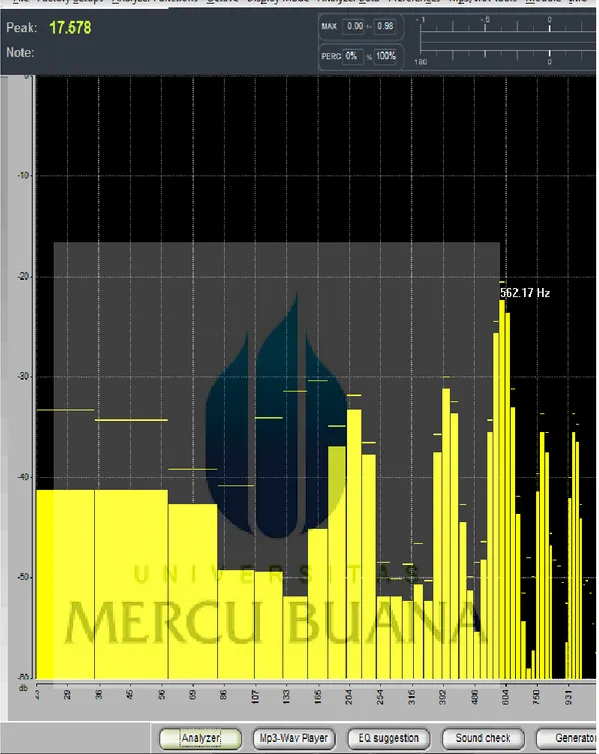
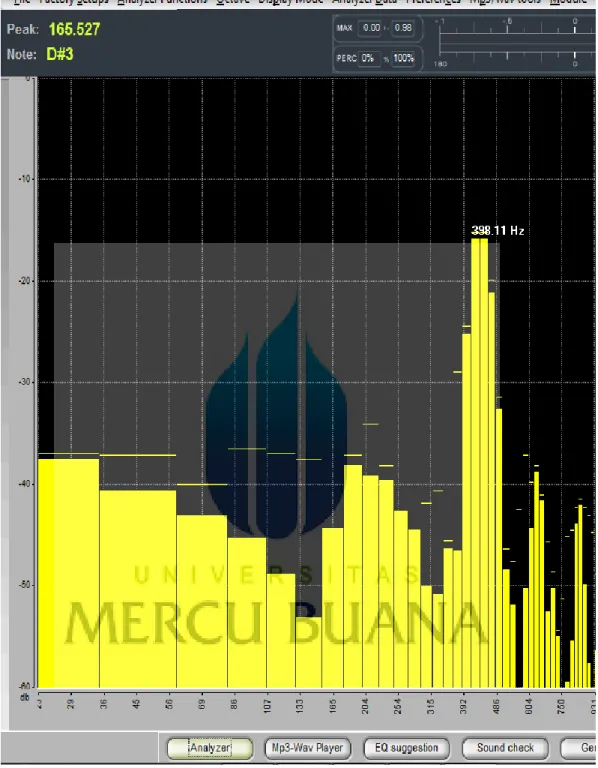
Gambar 4.4 frekuensi perintah “ma” Frekuensi perintah “back”
Gambar 4.5 frekuensi perintah “back” Frekuensi perintah “kan”
Gambar 4.6 frrekuensi perintah “kan” Frekuensi perintah “kir”
Gambar 4.7 frekuensi perintah “kir”
Frekuensi perintah “op”
Gambar 4.8 frekuensi perintah “op” Frekuensi trigger mas
4.3 Pengujian Kerja
Pada tahap pengujian ini dibagi menjadi dua macam pengujian, yaitu pengujian alat dengan pengendalian suara dilakukan dalam kondisi ideal pada ruangan yang tenang tanpa derau dan ruangan berderau. Pengujian alat menggunakan basis data yang sebelumnya sudah terekam pada easyVR Commander , yaitu dengan mengucapkan kata “ma”(maju), “back”(mundur), “kir”(kiri), “kan”(kanan), “op”(berhenti). Sample diambil secara acak pada kondisi ruangan tenang tanpa derau dan dalam ruangan ramai (berderau). Pada pengujian kinerja sistem, dilakukan dengan cara menjalankan sistem diikuti pengujian pada easyVR Commander. Untuk menghitung presentase keberhasilan digunakan persamaan (1).
Pengujian pada ruangan berderau
Tabel 4.7 Pengujian pada ruangan berderau
12 total (%) input perintah ke-1 ke-2 ke-3 ke-4 ke-5 ke-6 ke-7 ke-8 ke-9 ke-10 ma (maju) 1 1 0 0 1 0 0 1 0 0 4 40 kan (kanan) 1 0 0 1 1 0 0 0 0 1 4 40 kir (kiri) 1 1 1 1 0 1 0 0 1 1 7 70 op (berhenti) 1 1 0 1 0 1 1 0 1 0 6 60 back (mundur) 1 0 0 0 0 0 1 0 0 0 2 20 total 46
Dari tabel 4.6 dapat diketahui bahwa pengoperasian alat kurang cocok apabila dilaksanakan di ruangan berderau.
Pengujian pada ruangan tanpa derau
Tabel 4.8 Pengujian pada ruangan tenang tanpa derau
Pengujian total (%) input perintah ke-1 ke-2 ke-3 ke-4 ke-5 ke-6 ke-7 ke-8 ke-9 ke-10 ma (maju) 1 1 1 1 1 1 1 1 1 1 10 100 kan (kanan) 1 1 1 1 1 1 1 1 1 1 10 100 kir (kiri) 1 1 1 1 1 1 1 1 1 1 10 100 op (berhenti) 1 1 1 0 0 0 1 1 1 1 7 70 back (mundur) 1 1 0 0 1 0 1 0 1 1 6 60 total 86
Dibangdingkan dengan hasil pengujian yang terdapat pada tabel 2 terhadap tabel 1 terdapat perbedaan yang dipengaruhi oleh kondisi lingkungan. Namun dalam pengujia ini, kondisi lingkungan tidak hanya menjadi faktor keberhasilan alat bekerja secara maksimal. Pengucapan kata ketika pengujian sangat berpengaruh pada keberhasilan proses pengenalan.
4.4 Pengujian Sistem Keseluruhan
Pada tahap pengujian sitem dari alat akan bekerja sesuai dengan masukan perintah yang diberikan terhadap alat dengan pendahuluan inisial “mas” sebagai trigger atau pemicu. Alat diuji coba dengan lima perintah yang tertera pada tabel 4.5, yaitu : “ma” untuk perintah maju, “kan” untuk perintah putar kanan, “kir” untuk perintah putar kiri, “back” untuk perintah mundur, dan “op” untuk perintah berhenti.
Pada pengujian perintah “ma”, alat bergerak maju terus tanpa henti sebelum masuk perintah berikutnya atau perintah “op” sebagai masukan perintah agar alat berhenti. Pemberian masukan perintah ‘ma” harus diawali dengna trigger “mas”.
Gambar 4.10 posisi robot saat perintah maju
Setelah pengujian ‘ma” dan dilanjutkan dengan pengujian berikutnya, yaitu pengujian perintah “kir”. Dalam pengujian ini alat akan berputar searah dengan jarum jam (ke kanan) secara terus menerus sampai terdapat perintah baru yang diberikan kepada alat dan diawali dengan pemanggilan inisial “mas” sebagai trigger.
Gambar 4.11 posisi robot saat perintah putar kiri
Untuk pengujian perintah “kan” atau putar kiri yang harus di awali dengan pemangilan inisial “mas’ sebaga trigger seperti perintah sebelumnya. Apabila diberikan masukan perintah “kan” atau putar kirimaka alat akan berputar searah jarum jam (berputar ke kanan).
Gambar 4.12 posisi robot saat perintah putar kanan
Sedangkan untuk perintah “op” atau berhenti merupakan perintah yang berfungsi untuk menghentikan sistem. Apabila alat diberikan perintah tersebut, maka alat akan berhenti tak bergerak.
Setelah berhenti, dilanjutkan dengan pengujian “back” atau mundur. Dalam pengujian ini alat bergerak mundur sampai ada masukan perintah yang diinginkan, misalkan perintah mundur.
Gambar 4.13 posisi robot saat perintah mundur
Pengujian di atas dilaksanakan pada sebuah arena dengan tanda hitam sebagai jalur pengujian.