Abstrak— Gangguan sistem tenaga listrik selalu mengakibatkan ketidakstabilan. Gangguan tersebut dapat berupa putus jaringan (transien) maupun perubahan beban (dinamik). Perubahan beban yang terjadi secara tiba-tiba dan periodik tidak dapat direspon dengan baik oleh generator sehingga dapat mempengaruhi kestabilan dinamik sistem. Gangguan tersebut akan menyebabkan osilasi pada sistem dan mengakibatkan generator lepas sinkron. Untuk mengatasi hal ini, generator memerlukan kontroler tambahan yang dipasang di bagian exciter. Untuk mendapatkan performansi yang lebih baik, pengaturan frekuensi pada generator diberi aksi kontrol Kontroler Proporsional-Integral-Differensial (PID). Selain kontroler PID, osilasi dapat diredam dengan Dual Input Power System Stabilizer (DIPSS) yang dapat mengurangi sinyal noise agar sistem tetap stabil. Tugas akhir ini mengajukan konsep koordinasi SIMB yang dikontrol dengan PID dan DIPSS yang dioptimasi dengan Artificial Intelegent Firefly Algorithm (FA). Metode ini diharapkan dapat meredam osilasi frekuensi akibat adanya perubahan beban. Pengerjaan tugas akhir ini akan menggunakan software MATLAB2010.
Kata Kunci— Dual Power System Stabilzer, Firefly Algorithm , Kestabilan dinamik, PID, SMIB,.
I. PENDAHULUAN
istem tenaga listrik yang mengalami gangguan akan mengakibatkan ketidakstabilan sistem. Gangguan tersebut dapat berupa kenaikan dan penurunan beban secara tiba-tiba, putus jaringan, beban lebih (overload) atau hubung singkat. Perubahan beban yang terjadi secara tiba-tiba dan periodik tidak dapat direspon dengan baik oleh generator sehingga dapat mempengaruhi kestabilan dinamik sistem. Hal ini menyebabkan timbulnya osilasi frekuensi pada generator. Respon yang kurang baik dapat menimbulkan osilasi frekuensi dalam periode yang lama. Hal itu akan mengakibatkan pengurangan kekuatan transfer daya yang ada. Permasalahan tersebut terjadi pada sistem dengan satu mesin.
Kestabilan dinamik sistem tenaga listrik, adalah suatu studi kestabilan dengan asumsi respon governor sedikit berpengaruh. Hal ini disebabkan respon governor dibandingkan respon sistem eksitasi sangat lambat. Sehingga dalam kestabilan dinamik pengendali yang berpengaruh adalah sistem eksitasi. Penambahan penguatan rangkaian eksitasi kurang dapat menstabilkan sistem terutama saat beban puncak. Perubahan sinyal tambahan untuk menambah redaman pada keadaan beban puncak dapat menyelesaikan masalah tersebut.
Salah satu cara yang digunakan untuk menambah redaman ini dan menstabilkan sistem yaitu dengan menambahkan peralatan tambahan. Penggunaan peralatan tambahan yang tidak tepat pada sistem tenaga listrik akan menimbulkan banyak masalah. Dengan kondisi tersebut maka diusulkan peralatan tambahan berupa . Dalam penggunaan DIPSS, penalaan parameter yang optimal sangat berpengaruh dalam menstabilkan sistem. Namun
range parameter peralatan sangat beragam dan luas, maka untuk memperoleh nilai parameter secara cepat digunakanlah metode optimisasi menggunakan Firefly Algorithm (FA). Nilai respon diketahui dengan menganalisis nilai overshoot dan settling time, sedangkan untuk objective function menggunakan Integral Time Absolute Error (ITAE).
II. PEMODELANSISTEMDANALGORITMA A. Kestabilan Sistem Tenaga Listrik
Sistem tenaga listrik yang stabil memiliki keseimbangan antara daya input mekanis (prime mover) dengan daya output elektrik. Dalam keadaan ini generator berputar secara sinkron. Ketika terjadi penambahan atau penurunan beban, harus diikuti dengan perubahan daya mekanis dari prime mover. Apabila perubahan ini tidak diikuti oleh perubahan daya mekanis dalam menyesuaikan beban dan rugi-rugi sistem, maka akan terjadi ketidakstabilan. Kecepatan rotor generator (frekuensi sistem) dan tegangan akan menyimpang dari keadaan normal. Sesaat, akan terjadi peredaman besar antara daya input dari prime mover dengan daya output dari generator, terutama ketika terjadi gangguan.
Kestabilan dalam sistem tenaga listrik dibagi menjadi tiga jika didasarkan pada besarnya gangguan. Kestabilan tersebut yaitu Kestabilan steady-state, transient, dan dinamik.[1] B. Pemodelan Mesin Sinkron
Pemodelan sistem tenaga listrik disini menggunakan pemodelan linier. Pemodelan linier digunakan untuk mengamati respon dari sistem jika diberikan gangguan kecil. Perubahan akibat gangguan kecil secara tiba-tiba menyebabkan perubahan frekuensi disertai dengan osilasi. Secara umum sistem pembangkit dapat digambarkan seperti pada gambar 2.1.
Turbin Generator
Governor Sistem Eksitasi Torsi Daya, arus dan tegangan
Referensi ω Referensi V
Gambar 2.1 Diagram blok sistem pembangit tunggal.
C. Pemodelan Sistem Tenaga Listrik Mesin Tunggal Pada sistem ini sebuah generator dipresenstasikan oleh mesin tunggal (single machine) untuk mewakili sebuah pembangkit tenaga listrik yang terdiri dari beberapa generator. Gambar 2.2 merupakan representasi SMIB, yaitu sistem generator yang terhubung melalui saluran transmisi
Optimisasi Kontroler PID dan Dual Input Power System
Stabilizer (DIPSS) Pada Single Machine Infinite Bus (SMIB)
Menggunakan Firefly Algorithm (FA)
Mhd Fany, Imam Robandi, Ardyono
PriyadiJurusan Teknik Elektro, Fakultas Teknologi Industri (FTI), Institut Teknologi Sepuluh Nopember
(ITS)
dengan beban yang berjarak sangat jauh, sehingga ikatan yang terjadi sangat lemah.[2]
Gambar 2.2 Diagram sederhana sistem SMIB C.1 SMIB Model Hadi Saadat
Gambar 2.3 Diagram blok SMIB Model Hadi Saadat[5] C.2 Pemodelan Turbin dan Sistem Governor
Turbin uap memiliki input berupa energi mekanik yang disemburkan dari ketel uap dan memiliki output energi (torka) mekanik yang digunakan untuk menggerakan turbin uap. Model turbin uap dan sistem pengendali adalah model IEEE tipe 1[4] pada Gambar 2.4 :
Gambar 2.4 Diagram blok turbin air
dan sistem governor
Dari diagram blok pada gambar 2.4 diperoleh persamaan posisi katup uap dan daya mekanik sebagai berikut :
∆𝑃 𝑣= −𝐾𝑔𝑇∙𝐾𝑖 𝑔 ∙ ∆𝛿 − 𝐾𝑔 𝑇𝑔𝑅∆𝜔 − 1 𝑇𝑔∆𝑃𝑣 (2.1) ∆𝑃 𝑚 =𝐾𝑇𝑡 𝑡∆𝑃𝑣− 1 𝑇𝑡∆𝑃𝑚 (2.2)
C.3 Pemodelan Sistem Eksitasi
Sistem eksitasi terdiri atas rangkaian medan dan alat pengatur tegangan yang dinamakan Automatic Voltage Regulator (AVR). Pada bagian ini, model sistem eksitasi
yang dipakai mengacu pada model IEEE tipe 1 seperti yang ditunjukkan pada Gambar 2.5 berikut:
Gambar 2.5 Diagram blok sistem eksitasi
Dari diagram blok pada Gambar 2.5 didapatkan persamaan tegangan penguatan, tegangan eksitasi, tegangan medan terbangkit dan tegangan error sebagai berikut : 𝑉 𝑅=𝑇𝐾𝐴 𝑎∙ 𝑉𝑟𝑒𝑓− 𝐾𝐴 𝑇𝑎∙ 𝑉𝑒 − 1 𝑇𝑎𝑉𝑅 (2.3) 𝑉 𝑓=𝐾𝑇𝑒 𝑒 ∙ 𝑉𝑅− 1 𝑇𝑒∙ 𝑉𝑓 (2.4) È = −𝐾𝑔∙𝐾4 𝑇𝑔 ∙ ∆𝛿 + 𝐾𝑔 𝑇𝑔𝑉𝑓− 1 𝑇𝑔È (2.5) 𝑉 𝑒 =𝐾𝑇5 𝑅∙ ∆𝛿 + 𝐾6 𝑇𝑅∙ È − 1 𝑇𝑅∙ 𝑉𝑒 (2.6) C.4 Pemodelan Elektromekanik
Diagram fasor perubahan sudut rotor pada pemodelan mesin sinkron dapat dilihat pada Gambar 2.6.
Sumbu q Bus infinite s s
Gambar 2.6 Diagram fasor perubahan sudut rotor
Dengan,
: Perubahan kedudukan rotor. : Perubahan kecepatan rotor. s : Kecepatan sinkron.
Dari diagram fasor tersebut dapat diturunkan persamaan dasar berikut:
dt
d
=
s
(43)Persamaan torsi mesin, yaitu torsi mekanis dan torsi elektris dapat diturunkan sebagai berikut:
TmTe= d dt d J Lalu diperoleh : =
s f 2 TmTe=(
sM
D
)
Seperti pada Gambar 2.7, menunjukkan diagram blok dari persamaan elektromekanis SMIB :
Dari blok diagram tersebut, didapatkan persamaan berikut: ∆𝛿 =1 𝑠∆𝜔 ∆𝛿 = ∆𝜔 (2.7) Selanjutnya diperoleh : ∆𝜔 =2𝐻−1∙ ∆𝑃𝐿1+2𝐻1 ∙ ∆𝑃𝑚−2𝐻𝐾3∙ ∆𝛿 −2𝐻𝐾2∙ È −2𝐻𝐷 ∙ ∆𝜔 (2.8) Berikut persamaan state space SMIB Hadi Saadat Model : 𝑥 = 𝐴𝑥 + 𝐵𝑢 + 𝐿 𝑈 →Input ∆𝑃𝑣 ∆Ṗ𝑚 ∆𝛿 𝑉𝑅 𝑉𝑓 Ė 𝑉𝑒 ∆𝜔 = −1 𝑇𝑔 𝐾𝑡 𝑇𝑡 0 0 0 0 0 0 0 −1 𝑇𝑡 0 0 0 0 0 1 2𝐻 −𝐾𝑔∙𝐾𝑖 𝑇𝑔 0 0 0 0 −𝐾𝑔∙𝐾4 𝑇𝑔 𝐾5 𝑇𝑅 −1 2𝐻 0 0 0 −𝑇1 𝑎 𝐾𝑒 𝑇𝑒 0 0 −𝐾3 2𝐻 0 0 0 0 −𝑇1 𝑒 𝐾𝑔 𝑇𝑔 0 0 0 0 0 0 0 −1 𝑇𝑔 𝐾6 𝑇𝑅 −𝐾2 2𝐻 0 0 0 −𝐾𝐴 𝑇𝑎 0 0 −𝑇1 𝑅 0 −𝐾𝑔 𝑇𝑔𝑅 0 1 0 0 0 0 −𝐷 2𝐻 ∆𝑃𝑣 ∆𝑃𝑚 ∆𝛿 𝑉𝑅 𝑉𝑓 È 𝑉𝑒 ∆𝜔 + 0 0 0 0 0 0 0 𝐾𝐴 𝑇𝑎 0 0 0 0 0 0 −1 2𝐻 0 ∆𝑃𝐿1 𝑉𝑟𝑒𝑓 (2.9) lalu 𝑦 = 𝑐𝑥 𝑦 →Output 𝑉𝑡 = 0 0 𝐾5 0 0 𝐾6 0 0 ∆𝑃𝑣 ∆𝑃𝑚 ∆𝛿 𝑉𝑅 𝑉𝑓 È 𝑉𝑒 ∆𝜔 (2.10)
D. Dual Input Power System Stabilizer (DIPSS)
Dual Input Power System Stabilizer (DIPSS) merupakan tipe dari PSS yang dapat mereduksi sinyal noise[5,6]. Sinyal noise ini akan mengakibatkan kesalahan referensi input bagi sistem. Sinyal noise ini dapat berasal dari shaft motion misalnya lateral shaft run out yang menyebabkan modulasi berlebih pada sistem eksitasi generator atau dapat juga berasal dari osilasi torsional yang diakibatkan perubahan torsi elektris.
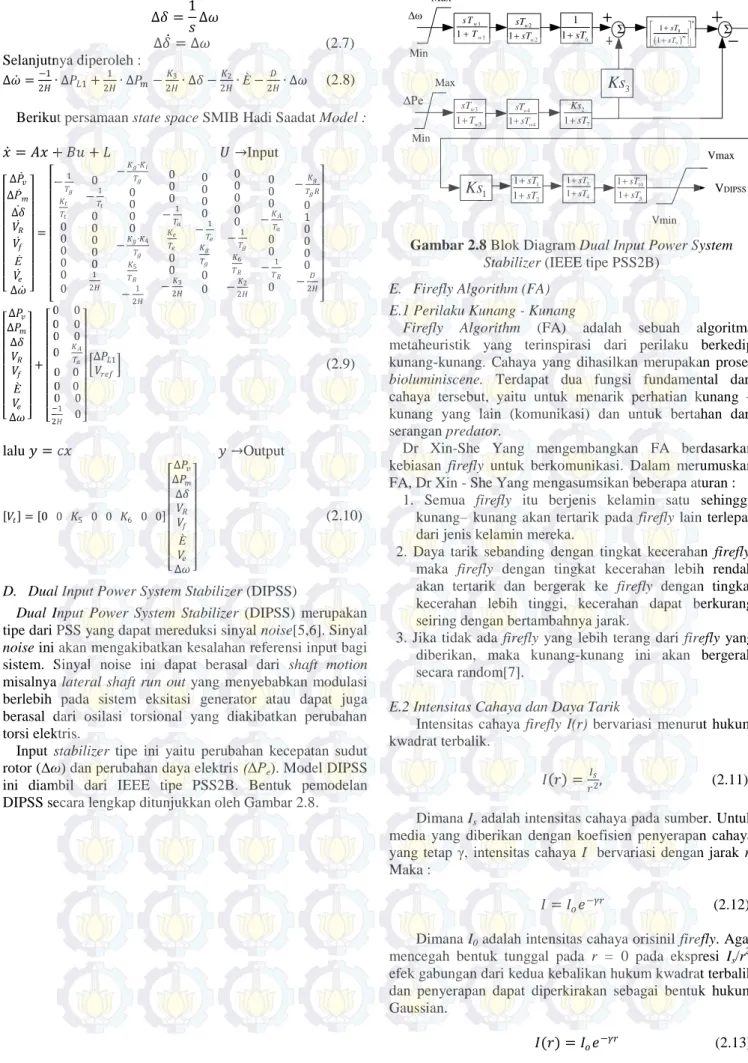
Input stabilizer tipe ini yaitu perubahan kecepatan sudut rotor (∆ω) dan perubahan daya elektris (∆Pe). Model DIPSS ini diambil dari IEEE tipe PSS2B. Bentuk pemodelan DIPSS secara lengkap ditunjukkan oleh Gambar 2.8.
Σ Σ Min Max Vmin Vmax Min Max ∆ω ∆Pe VDIPSS 1 1 1 w w s T T 1 22 w w sT sT 6 1 1 sT 8 9 1 1 n m sT sT 4 4 1 w w sT sT 3 3 1 w w sT T 2 7 1 Ks sT 3
Ks
1Ks
1 2 1 1 sT sT 3 4 1 1 sT sT 105 1 1 sT sT Gambar 2.8 Blok Diagram Dual Input Power System Stabilizer (IEEE tipe PSS2B)
E. Firefly Algorithm (FA) E.1 Perilaku Kunang - Kunang
Firefly Algorithm (FA) adalah sebuah algoritma metaheuristik yang terinspirasi dari perilaku berkedip kunang-kunang. Cahaya yang dihasilkan merupakan proses bioluminiscene. Terdapat dua fungsi fundamental dari cahaya tersebut, yaitu untuk menarik perhatian kunang – kunang yang lain (komunikasi) dan untuk bertahan dari serangan predator.
Dr Xin-She Yang mengembangkan FA berdasarkan kebiasan firefly untuk berkomunikasi. Dalam merumuskan FA, Dr Xin - She Yang mengasumsikan beberapa aturan :
1. Semua firefly itu berjenis kelamin satu sehingga kunang– kunang akan tertarik pada firefly lain terlepas dari jenis kelamin mereka.
2. Daya tarik sebanding dengan tingkat kecerahan firefly, maka firefly dengan tingkat kecerahan lebih rendah akan tertarik dan bergerak ke firefly dengan tingkat kecerahan lebih tinggi, kecerahan dapat berkurang seiring dengan bertambahnya jarak.
3. Jika tidak ada firefly yang lebih terang dari firefly yang diberikan, maka kunang-kunang ini akan bergerak secara random[7].
E.2 Intensitas Cahaya dan Daya Tarik
Intensitas cahaya firefly I(r) bervariasi menurut hukum kwadrat terbalik.
𝐼 𝑟 = 𝐼𝑠
𝑟2, (2.11) Dimana Is adalah intensitas cahaya pada sumber. Untuk media yang diberikan dengan koefisien penyerapan cahaya yang tetap γ, intensitas cahaya I bervariasi dengan jarak r. Maka :
𝐼 = 𝐼𝑜𝑒−𝛾𝑟 (2.12)
Dimana I0 adalah intensitas cahaya orisinil firefly. Agar mencegah bentuk tunggal pada r = 0 pada ekspresi Is/r2, efek gabungan dari kedua kebalikan hukum kwadrat terbalik dan penyerapan dapat diperkirakan sebagai bentuk hukum Gaussian.
Untuk daya tarik firefly yang sebanding dengan intensitas cahaya yang dilihat oleh firefly yang berdekatan, kita dapat menentukan daya tarik β dari seekor firefly sesuai jarak r dengan :
𝛽(𝑟) = 𝛽𝑜𝑒−𝛾𝑟𝑚 (2.14)
Dimana βo adalah daya tarik pada jarak r = 0. Sebaliknya, untuk skala yang panjang 𝛤 pada masa optimisasi, parameter γ dapat digunakan sebagai jenis nilai awal. Maka :
𝛾 =𝛤1𝑚 (2.15) Selanjutnya jarak antara setiap dua firefly i dan j pada xi dan xj, berturut – turut pada bidang Cartesian [7]:
𝑟𝑖𝑗 𝑥𝑖− 𝑥𝑗 = 𝑥𝑖,𝑘− 𝑥𝑗 ,𝑘 2
,
𝑑
𝑘=1 (2.16)
Pergerakan dari seekor kunang – kunang i menarik kunang – kunang yang lain (terang) yang ditentukan oleh:
𝑥𝑖= 𝑥𝑖+ 𝛽𝑜𝑒−𝛾𝑟𝑖𝑗
2
𝑥𝑗 − 𝑥𝑖 + 𝛼 ∈𝑖 , (2.17)
Keterangan :
xi : Koordinasi spasial firefly ke-i xj : Koordinasi spasial firefly ke-j 𝛼 : Parameter pengacakan
∈𝑖 : Nilai vektor dari nilai acak antara [0-1]
III. OPTIMASIPIDDANDIPSSMENGGUNAKANFA A. Data sistem SMIB
Model sistem dapat dilihat pada Gambar 2.3. Parameter sistem ditunjukkan pada tabel 3.1.
Tabel 3.1. Data Parameter SMIB
No. Gain Time Constant
1 Turbine Kt=1 Tt=0.5
2 Governor Kg=1 Tg=0.2
3 Amplifier Ka=10 Ta=0.1
4 Exciter Ke=1 Te=0.4
5 Generator KG=0.8 TG=1.4
6 Sensor Kr=1 Tr=0.05
7 Inertia H=5
8 Regulation R=0.05
Dalam simulasi beban bervariasi sebesar 0,8 persen (D=0,8) untuk perubahan 1 persen pada frekuensi. Kita asumsikan koefisien sinkronisasi Ps atau K3 = 1,5, dan koefisien tegangan K6 = 0,5. Sedangkan konstanta kopling K2 = 0,2, K1 = 1,4 dan K5=-0,1. Simulasi diagram blok dikerjakan pada SIMULINK MATLAB. Hasil simulasi berupa penyimpangan kecepatan rotor ∆𝜔, perubahan sudut rotor ∆𝛿 dan perubahan tegangan terminal 𝑉𝑡.
B. Penambahan Kontroler PID dan DIPSS
Sistem dengan kontroler PID dan DIPSS dapat dilihat pada Gambar 3.1.
Gambar 3.1 Blok diagram SMIB dengan kontroler PID dan
DIPSS
Setelah DIPSS dipasang pada sistem, respon sistem SMIB diamati. Respon yang diamati yaitu berupa perubahan kecepatan (∆ω), perubahan sudut rotor (∆δ) dan tegangan terminal (Vt).
C. Koordinasi Kontroler PID dan DIPSS menggunakan FA FA menala parameter kontroler PID dan DIPSS. Parameter PID terdiri dari Kp, Ki dan Kd, sedangkan parameter DIPSS terdiri dari parameter wash out (Τω1,Tω2,Tω3 dan Tω4), konstanta waktu (T1,T2,T3, T4, T5, T6,
T7, T8, T9 dan T10) dan gain (Ks1, Ks2 dan Ks3). Jadi ada 20 parameter yang akan dioptimisasi.
Data masukan batas atas dan batas bawah parameter – parameter PID dan DIPSS dapat dilihat pada Tabel 3.2.
Tabel 3.2 Data Parameter PID dan DIPSS[5,6]
Parameter Batas atas Batas bawah Parameter Batas atas Batas bawah Kp 0,5 1 T1 0,02 2 Ki 0,2 0,25 T2 0,02 2 Kd 0,25 0,3 T3 0,02 2 Ks1 0,2 20 T4 0,02 2 Ks2 0,1 5 T5 0,02 2 Ks3 0,5 2 T6 0,02 2 Tw1 1 10 T7 0.5 10 Tw2 1 10 T8 0,02 2 Tw3 1 10 T9 0,02 2 Tw4 1 10 T10 0,02 2
Firefly algorithm memuat n (banyak) firefly, masing – masing firefly memuat nilai 20 parameter yang akan ditala. Tetapan parameter FA yang digunakan dalam metode optimisasi ini secara lengkap ditunjukkan Tabel 3.3. Diagram alir mengenai prosedur komputasi dari metode yang diusulkan untuk mencari nilai parameter PID dan DIPSS menggunakan FA dapat dilihat pada Gambar 3.2.
Tabel 3.3. Parameter FA
Jumlah Firefly (n)
Jumlah Iterasi
Alpha Betamin Gamma
Mulai
Input : Parameter firefly Batas atas – batas bawah parameter PID dan DIPSS
Inisialiasi awal firefly
Firefly diinputkan sebagai input
parameter PID dan DIPSS untuk mendapatkan nilai fitness
Iterasi maksimum
Tidak
Ya
Perankingan firefly berdasarkan nilai fitness dan mencari nilai
fitness terbaik dari firefly
Update pergerakan firefly ke nilai
fitness yang terbaik
Update nilai firefly
Output: Parameter PID Parameter DIPSS
Update nilai fitness yang terbaik
(Lightbest)
Selesai
Evaluasi firefly menggunakan ITAE :
0
( )
t
I T A E t t d t
Gambar 3.2 Flowchart pencarian parameter
terbaik menggunakan FA
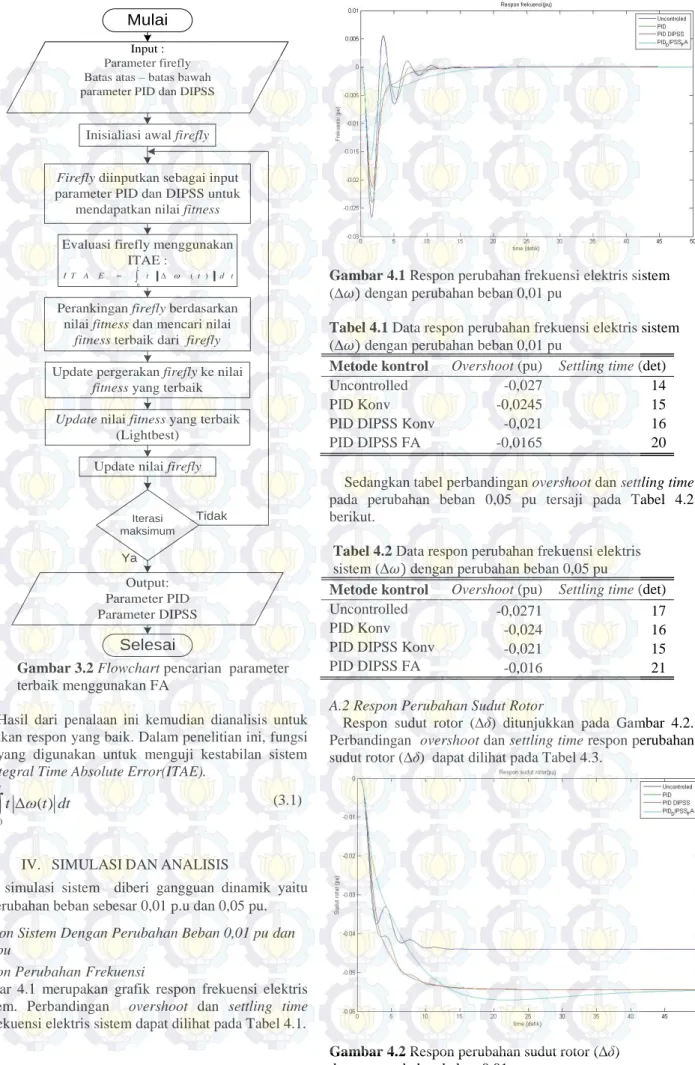
Hasil dari penalaan ini kemudian dianalisis untuk mendapatkan respon yang baik. Dalam penelitian ini, fungsi objektif yang digunakan untuk menguji kestabilan sistem adalah Integral Time Absolute Error(ITAE).
0
( ) t
ITAE
t
t dt (3.1)IV. SIMULASIDANANALISIS
Dalam simulasi sistem diberi gangguan dinamik yaitu berupa perubahan beban sebesar 0,01 p.u dan 0,05 pu. A. Respon Sistem Dengan Perubahan Beban 0,01 pu dan
0,05pu
A.1 Respon Perubahan Frekuensi
Gambar 4.1 merupakan grafik respon frekuensi elektris (∆f) sistem. Perbandingan overshoot dan settling time respon frekuensi elektris sistem dapat dilihat pada Tabel 4.1.
Gambar 4.1 Respon perubahan frekuensi elektris sistem
(∆𝜔) dengan perubahan beban 0,01 pu
Tabel 4.1 Data respon perubahan frekuensi elektris sistem
(∆𝜔) dengan perubahan beban 0,01 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled -0,027 14
PID Konv -0,0245 15
PID DIPSS Konv -0,021 16
PID DIPSS FA -0,0165 20
Sedangkan tabel perbandingan overshoot dan settling time pada perubahan beban 0,05 pu tersaji pada Tabel 4.2 berikut.
Tabel 4.2 Data respon perubahan frekuensi elektris sistem (∆𝜔) dengan perubahan beban 0,05 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled -0,0271 17
PID Konv -0,024 16
PID DIPSS Konv -0,021 15
PID DIPSS FA -0,016 21
A.2 Respon Perubahan Sudut Rotor
Respon sudut rotor (∆δ) ditunjukkan pada Gambar 4.2. Perbandingan overshoot dan settling time respon perubahan sudut rotor (∆δ) dapat dilihat pada Tabel 4.3.
Gambar 4.2 Respon perubahan sudut rotor (∆δ)
Tabel 4.3 Data respon perubahan sudut rotor (∆δ) dengan
perubahan beban 0,01 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled -0,037 17
PID Konv -0,05 24
PID DIPSS Konv -0,041 25
PID DIPSS FA -0,025 48
Sedangkan tabel perbandingan overshoot dan settling time pada perubahan beban 0,05 pu tersaji pada Tabel 4.4 berikut.
Tabel 4.4 Data respon perubahan sudut rotor (∆δ)
dengan perubahan beban 0,05 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled -0,038 -
PID Konv -0,041 15
PID DIPSS Konv -0,03 25
PID DIPSS FA -0,025 50
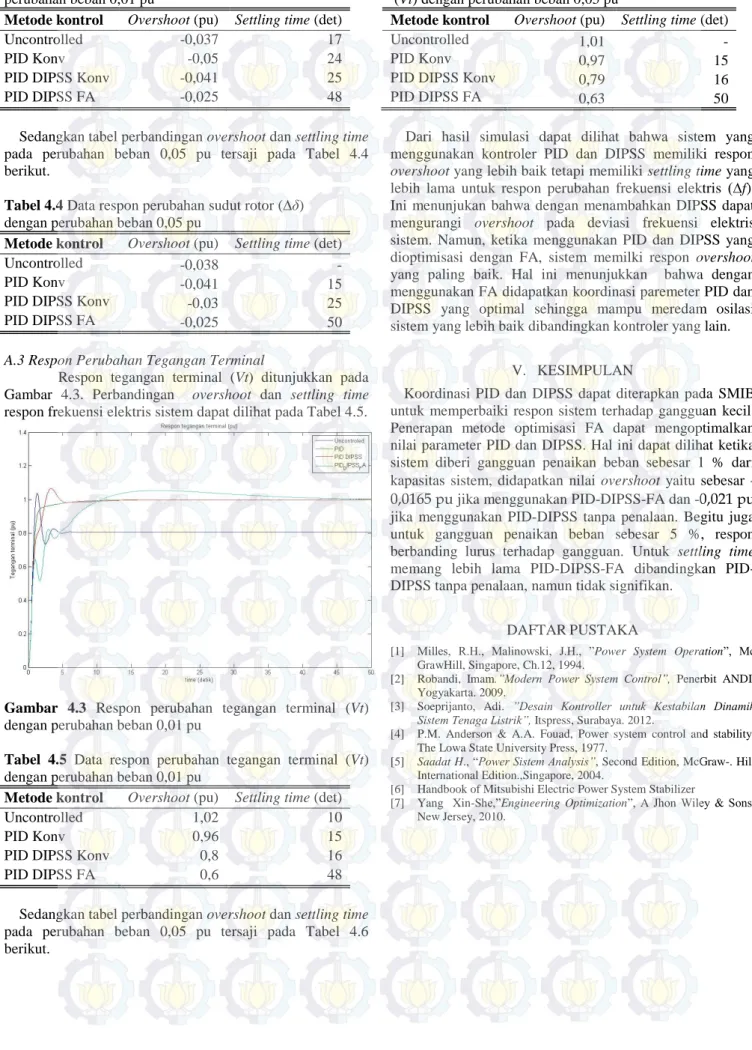
A.3 Respon Perubahan Tegangan Terminal
Respon tegangan terminal (Vt) ditunjukkan pada Gambar 4.3. Perbandingan overshoot dan settling time respon frekuensi elektris sistem dapat dilihat pada Tabel 4.5.
Gambar 4.3 Respon perubahan tegangan terminal (Vt)
dengan perubahan beban 0,01 pu
Tabel 4.5 Data respon perubahan tegangan terminal (Vt)
dengan perubahan beban 0,01 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled 1,02 10
PID Konv 0,96 15
PID DIPSS Konv 0,8 16
PID DIPSS FA 0,6 48
Sedangkan tabel perbandingan overshoot dan settling time pada perubahan beban 0,05 pu tersaji pada Tabel 4.6 berikut.
Tabel 4.6 Data respon perubahan tegangan terminal
(Vt) dengan perubahan beban 0,05 pu
Metode kontrol Overshoot (pu) Settling time (det)
Uncontrolled 1,01 -
PID Konv 0,97 15
PID DIPSS Konv 0,79 16
PID DIPSS FA 0,63 50
Dari hasil simulasi dapat dilihat bahwa sistem yang menggunakan kontroler PID dan DIPSS memiliki respon overshoot yang lebih baik tetapi memiliki settling time yang lebih lama untuk respon perubahan frekuensi elektris (∆f). Ini menunjukan bahwa dengan menambahkan DIPSS dapat mengurangi overshoot pada deviasi frekuensi elektris sistem. Namun, ketika menggunakan PID dan DIPSS yang dioptimisasi dengan FA, sistem memilki respon overshoot yang paling baik. Hal ini menunjukkan bahwa dengan menggunakan FA didapatkan koordinasi paremeter PID dan DIPSS yang optimal sehingga mampu meredam osilasi sistem yang lebih baik dibandingkan kontroler yang lain.
V. KESIMPULAN
Koordinasi PID dan DIPSS dapat diterapkan pada SMIB untuk memperbaiki respon sistem terhadap gangguan kecil. Penerapan metode optimisasi FA dapat mengoptimalkan nilai parameter PID dan DIPSS. Hal ini dapat dilihat ketika sistem diberi gangguan penaikan beban sebesar 1 % dari kapasitas sistem, didapatkan nilai overshoot yaitu sebesar -0,0165 pu jika menggunakan PID-DIPSS-FA dan -0,021 pu jika menggunakan PID-DIPSS tanpa penalaan. Begitu juga untuk gangguan penaikan beban sebesar 5 %, respon berbanding lurus terhadap gangguan. Untuk settling time memang lebih lama DIPSS-FA dibandingkan PID-DIPSS tanpa penalaan, namun tidak signifikan.
DAFTARPUSTAKA
[1] Milles, R.H., Malinowski, J.H., ‖Power System Operation‖, Mc GrawHill, Singapore, Ch.12, 1994.
[2] Robandi, Imam.”Modern Power System Control”, Penerbit ANDI, Yogyakarta. 2009.
[3] Soeprijanto, Adi. ”Desain Kontroller untuk Kestabilan Dinamik
Sistem Tenaga Listrik”, Itspress, Surabaya. 2012.
[4] P.M. Anderson & A.A. Fouad, Power system control and stability, The Lowa State University Press, 1977.
[5] Saadat H., ―Power Sistem Analysis”, Second Edition, McGraw-. Hill International Edition.,Singapore, 2004.
[6] Handbook of Mitsubishi Electric Power System Stabilizer
[7] Yang Xin-She,‖Engineering Optimization‖, A Jhon Wiley & Sons, New Jersey, 2010.
![Gambar 2.3 Diagram blok SMIB Model Hadi Saadat[5]](https://thumb-ap.123doks.com/thumbv2/123dok/4555099.3311068/2.892.74.828.107.1149/gambar-diagram-blok-smib-model-hadi-saadat.webp)