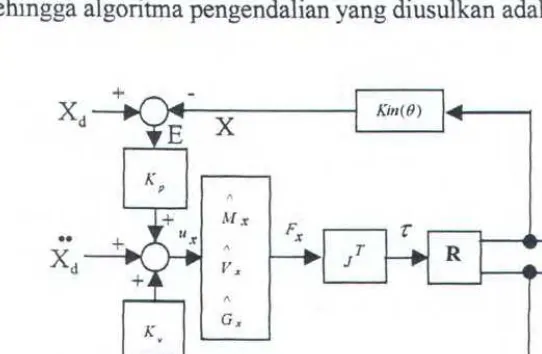
PENGENDALIAN MANIPULATOR ROBOT DENGAN FUNGSI BASIS RADIAL
Bebas
88
0
0
Teks penuh
Gambar
+7


Dokumen terkait
Perbandingan antara jumlah Neuron dalam Hidden Layer Neural Network dengan Error Jarak untuk mendapatkan solusi kinematika balik manipulator robot dari titk berangkat
3.1.2 Aproksimasi Persamaan forced KdV dan Kondisi Awal Menggunakan Jaringan RBF Metode jaringan RBF yang digunakan untuk mengaproksimasi persamaan forced KdV adalah metode
Tujuan dari tugas akhir ini adalah membuat aplikasi pengenalan suara untuk pengendalian robot dengan menggunakan jaringan syaraf tiruan sebagai algoritma pembelajaran dan
Untuk cara kerja robot yang akan penulis teliti pada penelitian ini yaitu pergerakan robot arm manipulator pendeteksi dan pemindah objek berdasarkan warna yang
Beranjak dari kebutuhan akan perancangan manipulator robot yang lebih cepat, lebih terintegrasi serta simulasi kinematika yang lebih akurat, maka untuk tujuan
Tujuan dari tugas akhir ini adalah membuat aplikasi pengenalan suara untuk pengendalian robot dengan menggunakan jaringan syaraf tiruan sebagai algoritma pembelajaran dan
Proses learning RBF dengan Extended Kalman Filter menggunakan parameter bobot pada hidden center RBF yaitu noise proses pada perhitungan bobot hidden center dan
Tujuan penelitian ini adalah memodifikasi manipulator tipe silinder untuk robot pemanen buah dalam greenhouse sehingga dihasilkan manipulator ruang pergerakan yang
