MODIFIKASI MANIPULATOR TIPE SILINDER UNTUK ROBOT
PEMANEN BUAH DALAM GREENHOUSE
SKRIPSI
SETYA PERMANA SUTISNA
F14070007
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
MODIFICATION OF CYLINDRICAL MANIPULATOR TYPE FOR GREENHOUSE FRUIT HARVESTING ROBOT
Setya Permana Sutisna and I Dewa Made Subrata
Department of Mechanical and Biosystem Engineering, Faculty of Agricultural Technology, Bogor Agricultural University, IPB Darmaga Campus, PO Box 220, West Java,
Indonesia.
Phone 62 81341510145, e-mail: setper_007@yahoo.co.id
ABSTRACT
The harvesting robot need to be design so it has capacity to harvest the fruits or vegetables selectively. The selective harvesting means only harvest the ripe fruit while the non ripe fruit still remined on the tree. The manipulator is one of the robot parts that has an important function for successful of the robot task. The problem of the previous manipulator is that horizontal prismatic joint disturb the oposite plant of target. This disturbance make alignment error of the manipulator. Miss alignment of the manipulator from target will cause the harvesting failure because of the end-effector tip can not reach the fruit. Purpose of this research was to modify the horizontal prismatic joint into the horizontal rotational joint. Therefore the modified manipulator has three degree of freedom that is consisted of two rotational joint and one prismatic joint. Result of the research show that the positioning error of the x coordinate is 13.8 mm, y coordinate is 15.1 mm, z coordinate is 3.2 mm. The positioning error of the x coordinate and y coordinate was caused by inertia force of the rotational joint. The positioning accuracy of the z coordinate was caused by time response of the program more slow than encoder pulse frecuency of the vertical translational joint. Therefore in this research motion distance was measured using timer. For better result the measurement method of each joints need to be change from incremental encoder into absolute encoder.
SETYA PERMANA SUTISNA. F14070007. Modifikasi Manipulator Tipe Silinder Untuk Robot Pemanen Buah Dalam Greenhouse. Di bawah bimbingan I Dewa Made Subrata. 2011
RINGKASAN
Untuk menjaga kualitas buah hasil produksi pertanian diperlukan kegiatan pemanenan pada tingkat kematangan yang merata. Pemanenan dengan tenaga manusia seringkali menghasilkan buah yang dipanen tidak matang secara merata, oleh karena itu dibutuhkan suatu alat yang mampu melakukan pemanenan secara selektif, yaitu robot pemanen. Salah satu bagian yang cukup penting dalam menunjang kesuksesan robot pemanen adalah manipulator. Fungsi manipulator yaitu untuk memposisikan end-effector dalam menjangkau target. Kesalahan dalam menjangkau target dapat menyebabkan kegalalan robot dalam memanen. Manipulator yang akan dimodifikasi menggunakan gerak translasi untuk menjangkau koordinat bidang horisontal. Pada mekanisme ini dapat mengganggu tanaman pada sisi yang berlainan target karena pada bagian target batang akan memendek tetapi pada bagian lainnya memanjang.
Tujuan penelitian ini adalah memodifikasi manipulator tipe silinder untuk robot pemanen buah dalam greenhouse sehingga dihasilkan manipulator ruang pergerakan yang lebih sempit serta tidak mengganggu tanaman selain target dan menguji ketelitian manipulator dalam menjangkau target dalam koordinat ruang dengan beberapa pembebanan. Penelitian dilakukan di laboratorium instrumentasi dan kontrol, departemen Teknik Mesin dan Biosistem, IPB pada bulan Februari sampai Agustus 2011.
Penelitian dimulai dengan pendekatan disain untuk menentukan kebutuhan bahan-bahan yang akan digunakan. Bahan-bahan yang telah ditentukan kemudian dirangkai sehingga membentuk fisik manipulator. Untuk pengontrolan lama putaran motor digunakan pemrograman LabView dengan Ni-DaQ 6009 untuk menghubungkan manipulator ke perangkat komputer. Pengujian dilakukan dengan mengukur besar simpangan ujung manipulator terhadap koordinat target.
Manipulator telah berhasil dibuat dengan tiga derajat bebas yang terdiri dari dua rotational joint (joint 1 dan joint 2) serta satu perismatic joint (joint 3). Rata-rata simpangan manipulator
pengujian tanpa beban, yaitu koordinat x 13.8 mm dengan ketelitian 95.7 %, koordinat y 15.1 mm dengan ketelitian 92.3 %, dan koordinat z 3.2 mm dengan ketelitian 99.4%. Rata-rata simpangan
manipulator pengujian dengan pembebanan 900 g yaitu koordinat x 48.8 mm dengan ketelitian
85.9 %, koordinat y 43.2 mm dengan ketelitian 82.3 %, dan koordinat z 9.9 mm dengan ketelitian 98.5%. Rata-rata simpangan manipulator pengujian dengan pembebanan 2200 g yaitu koordinat x 62.6 mm dengan ketelitian 82.7%, koordinat y 60.3 mm dengan ketelitian 78.4%, dan koordinat z 21.2 mm dengan ketelitian 96.5%. Besar simpangan manipulator dipengaruhi oleh besar momen inersia pada joint 2 yang menyebabkan sudut yang dihasilkan lebih besar dari yang diinginkan, frekuensi pembacaan program yang lebih lambat dibandingkan frekuensi encoder joint 3 sehingga pengontrolan
joint 3 dilakukan dengan pewaktu sehingga perubahan kecepatan motor akan mempengaruhi
MODIFIKASI MANIPULATOR TIPE SILINDER UNTUK ROBOT PEMANEN
BUAH DALAM GREENHOUSE
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar
SARJANA TEKNOLOGI PERTANIAN
Pada Departemen Teknik Mesin dan Biosistem,
Fakultas Teknologi pertanian,
Institut Pertanian Bogor
Oleh
SETYA PERMANA SUTISNA
F14070007
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
2011
Judul Skripsi : Modifikasi Manipulator Tipe Silinder Untuk Robot Pemanen Buah Dalam
Greenhouse
Nama : Setya Permana Sutisna
NIM : F14070007
Menyetujui,
Pembimbing,
(Dr. Ir. I Dewa Made Subrata, M. Agr) NIP. 19620803 198703 1 002
Mengetahui : Ketua Departemen,
(Dr. Ir. Desrial, M.Eng) NIP. 19661201 199103 1 004
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER INFORMASI
Saya menyatakan dengan sebenar-benarnya bahwa skripsi dengan judul MODIFIKASI MANIPULATOR TIPE SILINDER UNTUK ROBOT PEMANEN BUAH DALAM GREENHOUSE adalah hasil karya saya sendiri dengan arahan DOSEN PEMBIMBING AKADEMIK, dan belum diajukan dalam bentuk apapun pada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, September 2011 Yang membuat pernyataan
Setya Permana Sutisna F14070007
BIODATA PENULIS
Setya Permana Sutisna. Lahir di Makassar, 6 Maret 1989 dari ayah Entis Sutisna dan ibu Subaedah Ruku, sebagai anak pertama dari dua bersaudara. Penulis menamatkan SMA pada tahun 2007 dari SMAN 1, Kendari dan pada tahun yang sama diterima di IPB melalui jalur Undangan Seleksi Masuk IPB. Penulis memilih Mayor Teknik Pertanian, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian. Penulis melaksanakan Praktik Lapangan pada tahun 2010 di PT. Indofood CBP Sukses Makmur Divisi Biskuit, Purwakarta, Jawa Barat.
KATA PENGANTAR
Puji dan syukur dipanjatkan kehadapan Allah SWT. atas karuniaNya sehingga skripsi ini berhasil diselesaikan. Peneleitian dengan judul “Modifikasi Manipulator Tipe Silinder Untuk Robot Pemanen Buah Dalam Greenhouse” dilaksanakan di Laboratorium Instrumentasi dan Kontrol Departemen Teknik Mesin dan Biosistem, Institut Pertanian Bogor sejak bulan Februari sampai Agustus 2011.
Dengan telah selesainya penelitian hingga tersusunnya skripsi ini, penulis ingin menyampaikan penghargaan dan terima kasih yang sebesar-besarnya kepada :
1. Dr. Ir. I Dewa Made Subrata M.Agr sebagai dosen pembimbing utama.
2. Dr. Ir. Radite Praeko Agus Setiawan, M.Agr dan Dr. Ir. Usman Ahmad, M.Agr sebagai dosen penguji.
3. Bapak Joko dan bapak Parma teknisi laboratorium yang telah menyediakan fasilitas selama penelitian.
4. Bapak Edoy yang telah membantu pembuatan kontruksi.
5. Orang tua penulis yang telah memberikan doa dan motivasi untuk kesuksesan penelitian ini.
6. Anggi, Ayunk, Yan, Imanta, Dhiaz, Niko, atas bantuan dan dukungannya 7. Teman-teman TEP 44 atas kebersamaan dan persahabatnya.
8. Irna yang telah memberikan bantuan, doa dan motivasi untuk kesuksesan penelitian ini.
Akhirnya penulis berharap semoga tulisan ini bermanfaat dan memberikan kontribusi yang nyata terhadap perkembangan ilmu pengetahuan dalam bidang keteknikan pertanian.
Bogor, September 2011
iv
DAFTAR ISI
KATA PENGANTAR ... iii
DAFTAR TABEL ... v DAFTAR GAMBAR ... vi DAFTAR LAMPIRAN ... ix I. PENDAHULUAN ... 1 1.1. Latar belakang ... 1 1.2. Tujuan ... 2
II. TINJAUAN PUSTAKA ... 3
2.1. Green House ... 3
2.2. Robot Bio-Produksi ... 3
2.3. Manipulator ... 5
2.4. LabVIEW ... 8
2.5. Manipulator Sebelumnya ... 8
III. PENDEKATAN DISAIN ... 10
3.1. Kriteria Disain ... 10
3.2. Rancangan Fungsional ... 11
3.3. Rancangan Struktural ... 14
3.4. Analisis Teknik ... 17
IV. METODOLOGI PENELITIAN ... 24
4.1. Tempat dan Waktu ... 24
4.2. Bahan dan Alat ... 24
4.3. Metode ... 24
V. HASIL DAN PEMBAHASAN ... 29
5.1. Konstruksi Prototipe Manipulator ... 29
5.2. Kalibrasi ... 34
5.3. Penyempurnaan Kalibrasi ... 37
5.4. Validasi Masing-masing Joint ... 41
5.5. Pengujian Manipulator dari Posisi Switch Limit ke Koordinat Tujuan ... 53
5.6. Pengujian Manipulator Point to Point ... 56
VI. SIMPULAN DAN SARAN ... 59
6.1. Simpulan ... 59
6.2. Saran ... 59
DAFTAR PUSTAKA ... 60
v
DAFTAR TABEL
Tabel 1. Hasil pengujian manipulator tipe cylindrical-coordinate ... 8 Tabel 2. Faktor-faktor koreksi daya yang akan ditransmisikan, fc ... 19 Tabel 3. Kalibrasi gerak translasi joint 3 dengan pewaktu ... 37
vi
DAFTAR GAMBAR
Gambar 1. Operasi robot di dalam greenhouse ... 4
Gambar 2. Histogram simpangan setelah koreksi ... 4
Gambar 3 . Manipulator Tipe Cartesian-Coordinate ... 5
Gambar 4. Manipulator tipe cylindrical-coordinate ... 6
Gambar 5. Manipulator tipe polar-coordinate/ spherical-coordinate ... 6
Gambar 6. Manipualtor tipe scara ... 7
Gambar 7. Manipulator tipe articulated/ anthropomorphic ... 7
Gambar 8. Manipulator yang telah ada dan akan dimodifikasi ... 9
Gambar 9. Bagian manipultor yang tidak dimodifikasi ... 14
Gambar 10. Bagian modifikasi manipulator ... 16
Gambar 11. Ni-DaQ usb 6009 ... 17
Gambar 12. Segitiga sembarang ... 26
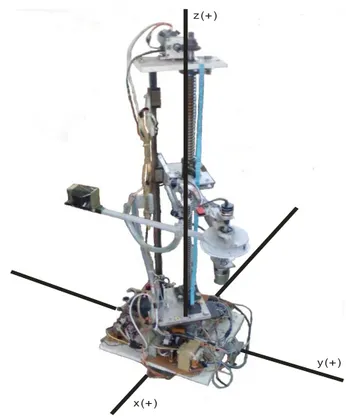
Gambar 13. Hasil modifikasi manipulator ... 29
Gambar 14. Luas cakupan koordinat bidang xy manipulator sebelum dimodifikasi ... 30
Gambar 15. Luas cakupan koordinat bidang xy manipulator setelah dimodifikasi ... 30
Gambar 16. Joint dan link horisontal... 33
Gambar 17. Besar sudut minimal joint 2 ... 33
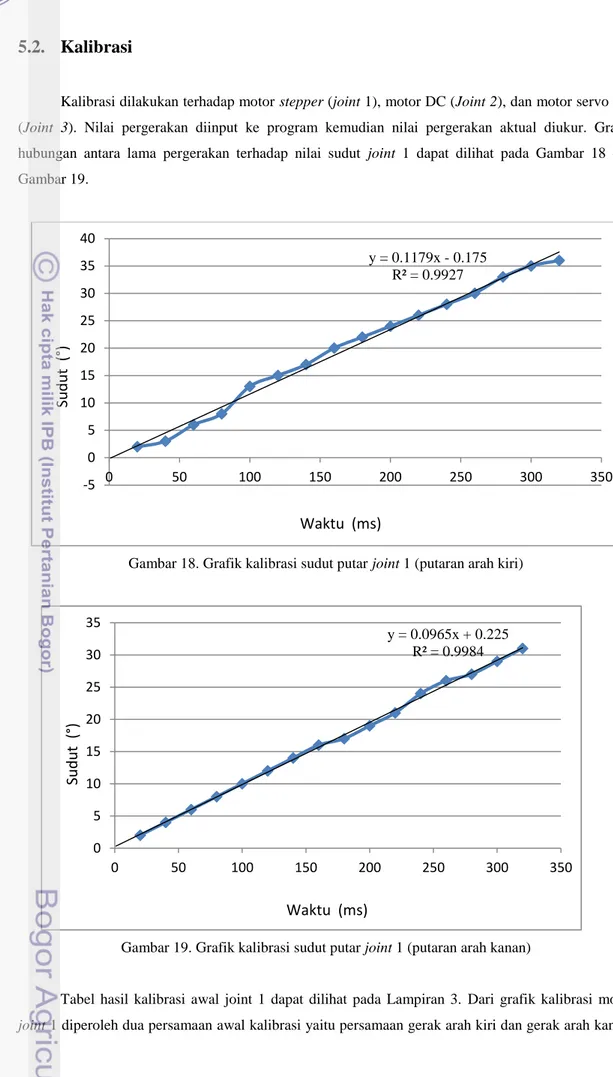
Gambar 18. Grafik kalibrasi sudut putar joint 1 (putaran arah kiri) ... 34
Gambar 19. Grafik kalibrasi sudut putar joint 1 (putaran arah kanan) ... 34
Gambar 20. Grafik kalibrasi gerak translasi joint 3 logika 1 (pergeseran arah bawah) ... 35
Gambar 21. Grafik kalibrasi gerak translasi joint 3 logika 1 (pergeseran arah atas) ... 35
Gambar 22. Grafik kalibrasi gerak translasi joint 3 (pergeseran arah atas) dengan perhitungan pulsa encoder ... 36
Gambar 23. Grafik kalibrasi gerak translasi joint 3 (pergeseran arah bawah) dengan perhitungan pulsa encoder ... 36
Gambar 24. Grafik koreksi sudut putar joint 1 (putaran arah kiri) ... 38
Gambar 25. Grafik koreksi sudut putar joint 1 (putaran arah kanan) ... 38
Gambar 26. Grafik koreksi jarak translasi joint 3 (pergeseran arah atas) dengan logika 1 ... 39
Gambar 27. Grafik koreksi jarak translasi joint 3 (pergeseran arah bawah) dengan logika 1 ... 40
vii
Gambar 28. Grafik validasi jarak translasi joint 3(pergeseran arah atas) dengan perhitungan pulsa encoder ... 41
Gambar 29. Grafik validasi jarak translasi joint 3 (pergeseran arah bawah) dengan perhitungan pulsa encoder ... 41
Gambar 30. Simpangan hasil validasi joint 1 putaran arah kiri ... 42
Gambar 31. Simpangan hasil validasi joint 1 putaran arah kanan ... 42
Gambar 32. Simpangan hasil validasi joint 2 putaran arah kiri ... 43
Gambar 33. Simpangan hasil validasi joint 2 putaran arah kanan ... 43
Gambar 34. Simpangan hasil validasi joint 3 pergerakan arah atas ... 44
Gambar 35. Simpangan hasil validasi joint 3 pergerakan arah bawah ... 44
Gambar 36. Simpangan hasil validasi joint 1 pembebanan 900 g putaran arah kiri ... 46
Gambar 37. Simpangan hasil validasi joint 1 pembebanan 900 g putaran arah kanan ... 46
Gambar 38. Simpangan hasil validasi joint 1 pembebanan 2200 g putaran arah kiri ... 47
Gambar 39. Simpangan hasil validasi joint 1 pembebanan 2200 g putaran arah kanan ... 47
Gambar 40. Simpangan hasil validasi joint 2 pembebanan 900 g putaran arah kanan ... 48
Gambar 41. Simpangan hasil validasi joint 2 pembebanan 900 g putaran arah kiri ... 48
Gambar 42. Simpangan hasil validasi joint 2 pembebanan 2200 g putaran arah kanan ... 49
Gambar 43. Simpangan hasil validasi joint 2 pembebanan 2200 g putaran arah kiri ... 49
Gambar 44. Perubahan simpangan joint 1 dan joint 2 putaran arah kiri akibat pembebanan ... 50
Gambar 45. Perubahan simpangan joint 1 dan joint 2 putaran arah kanan akibat pembebanan ... 50
Gambar 46. Simpangan hasil validasi joint 3 pembebanan 900 g pergerakan arah atas ... 51
Gambar 47. Simpangan hasil validasi joint 3 pembebanan 900 g pergerakan arah bawah ... 51
Gambar 48. Simpangan hasil validasi joint 3 pembebanan 2200 g pergerakan arah atas ... 52
Gambar 49. Simpangan hasil validasi joint 3 pembebanan 2200 g pergerakan arah bawah ... 52
viii
Gambar 51. Hasil pengujian manipulator dari limit swicth ke koordinattertentu tanpa beban pada ujung bebas manipulator ... 54 Gambar 52. Hasil pengujian limit ke koordinat dengan beban 900 g ... 55 Gambar 53. Hasil pengujian pergerakan dari posisi limit switch ke koordinat
tertentu dengan beban 2200 g ... 55 Gambar 54. Perubahan simpangan koordinat x, koordinat y, dan koordinat z
dengan penambahan beban ... 56 Gambar 55. Perubahan simpangan masing-masing joint untuk
mode gerakan koordinat ke titik koordinat lain tanpa beban ... 57 Gambar 56. Perubahan simpangan masing-masing joint untuk mode gerakan
dari titik koordinat ke titik koordinat lain dengan pembebanan 900 g ... 57 Gambar 57. Perubahan simpangan masing-masing joint gerakan
ix
DAFTAR LAMPIRANLampiran 1. Tahapan Penelitian ... 62
Lampiran 2. Diagram alir program pengendalian manipulator ... 63
Lampiran 3. Kalibrasi motor joint 3 ... 64
Lampiran 4. Koreksi motor joint 1 ... 65
Lampiran 5. Validasi motor joint 1 putaran arah kiri ... 66
Lampiran 6. Validasi motor joint 1putaran arah kanan ... 67
Lampiran 7. Koreksi persamaan kalibrasi awal sudut putar joint 2... 68
Lampiran 8. Validasi motor joint 2 putaran arah kiri ... 69
Lampiran 9. Validasi motor joint 2 putaran arah kanan ... 70
Lampiran 10. Kalibrasi motor joint 3 logika 1 ... 71
Lampiran 11. Koreksi motor joint 3 logika 1 pergerakan arah atas ... 73
Lampiran 12. Validasi motor joint 3 logika 1 pergerakan arah bawah ... 74
Lampiran 13. Validasi motor joint 3 logika 1 pergerakan arah atas ... 75
Lampiran 14. Validasi motor joint 3 logika 1 pergerakan arah bawah ... 76
Lampiran 15. Kalibrasi motor joint 3 pulsa encoder ... 77
Lampiran 16 Koreksi motor joint 3 pulsa encoder ... 78
Lampiran 17. Hasil validasi motor joint 3 pulsa encoder pergerakan arah atas ... 79
Lampiran 18. Hasil validasi motor joint 3 pulsa encoder pergerakan arah bawah ... 80
Lampiran 19. Hasil validasi motor joint 3 pewaktu pergerakan arah atas ... 81
Lampiran 20. Hasil validasi motor joint 3 pewaktu pergerakan arah bawah... 82
Lampiran 21. Hasil pengujian manipulator limit ke koordinat tanpa beban ... 83
Lampiran 22. Hasil pengujian manipulator limit ke koordinat pembebanan 900 g ... 85
Lampiran 23. Hasil pengujian manipulator limit ke koordinat pembebanan 2200 g ... 87
Lampiran 24. Hasil pengujian manipulator point to point tanpa beban ... 89
Lampiran 25. Hasil pengujian menipulator koordinat ke koordinat pembebanan 900 g ... 93
Lampiran 26. Hasil pengujian manipulator point to point pembebanan 2200 g ... 97
Lampiran 27. Gambar konstruksi ... 101
Lampiran 28. Program pengendali motor joint 1 arah kanan ... 103
Lampiran 29. Program pengendali motor joint 1 arah kiri ... 104
Lampiran 30. Program pengendali motor joint 2 arah kanan ... 105
Lampiran 31. Program pengendali motor joint 2 arah kiri ... 106
x
Lampiran 33. Program pengnedali motor joint 3 logika 1 arah bawah ... 108
Lampiran 34. Program pengendali motor joint 3 pulsa encoder arah atas ... 109
Lampiran 35. Program pengendali motor joint 3 pulsa encoder arah bawah ... 110
Lampiran 36. Program pengendali motor joint 3 pewaktu arah atas ... 111
Lampiran 37. Program pengendali motor joint 3 pewaktu arah bawah ... 112
Lampiran 38. Program kalibrasi koordinat xy menjadi nilai sudut putar ... 113
Lampiran 39. Program pengendali manipulator keseluruhan ... 115
1
I. PENDAHULUAN
1.1 Latar Belakang
Seiring dengan bertambahnya jumlah penduduk dan meningkatnya kesejahteraan masyarakat menyebabkan tingginya kebutuhan pangan. Penggunaan dan pengalihfungsian lahan pertanian menjadi pemukiman dan industri mengurangi jumlah lahan produktif. Jumlah lahan yang semakin sempit dan kebutuhan pangan yang terus meningkat mendorong untuk dilakukan budidaya pertanian secara efektif dan efisien.
Saat ini masyarakat telah memiliki kesadaran yang tinggi terhadap keamanan pangan. Bahan makanan yang dikonsumsi dipilih secara selektif untuk kesehatan jangka panjang. Tingginya permintaan tersebut mendorong peningkatan pertumbuhan industri pertanian . Perkembangan industri pertanian juga terjadi pada kegiatan budidaya. Untuk bahan pangan tertentu seperti buah dan sayuran, kegiatan budidaya mengarah pada pemakaian greenhouse. Budidaya pertanian dalam greenhouse dapat mengurangi ketidakpastian dan memperbesar harapan perolehan keuntungan yang banyak. Lingkungan dalam greenhouse dapat dengan mudah diatur dibandingkan lingkungan luar. Hasil yang diperoleh dapat memiliki kualitas yang lebih baik sehingga dapat memenuhi permintaan masyarakat terhadap kualitas pangan yang lebih baik.
Perkembangan penggunaan greenhouse mempengaruhi kebutuhan tenaga kerja. Untuk menjamin kualitas produk yang dihasilkan juga dipengaruhi oleh kegiatan pemanenan. Buah yang akan dipanen harus dipanen tepat waktu dengan tingkat kematangan tertentu. Buah yang dihasilkan dalam suatu pohon tidak matang dalam waktu bersamaan sehingga pemanenan perlu dilakukan secara selektif. Pemanenan hanya dilakukan pada buah yang telah matang sedangkan buah yang belum matang dibiarkan dipohon. Pemanenan yang kurang tepat akan mempengaruhi kualitas hasil produksi yang dapat menurunkan harga jual. Pemanenan dengan tenaga manusia sering kali diperoleh tingkat kematangan buah yang tidak seragam oleh karena itu dibutuhkan suatu alat yang bisa melakukan pemanenan secara selektif. Ketidakseragaman terjadi karena perbedaan “rasa” atau sensitifitas pancaindera. Perbedaan sensitifitas pancaindera antara orang yang satu dan lainnya berbeda tergantung pada pengalaman orang tersebut dalam menentukan kematangan. Sensitifitas pancaindera juga dapat dipengaruhi oleh keadaan orang yang sama, misalnya saat sehat dan sakit, atau saat fit dan lelah. Untuk menjamin kualitas tersebut maka muncul ide untuk membuat robot pemanen.
Robot pemanen diharapkan mampu memanen dengan “cerdas” yaitu memanen buah sesuai dengan tingkat kematangan yang diharapkan. Tentunya robot perlu diberi kecerdasan buatan
(artificial intelligence) sehingga mampu berpikir sendiri dalam menerjemahkan dan menjalankan
perintah. Hal lain yang dibutuhkan yaitu sensor yang dapat berfungsi sebagai pengindera. Kriteria tingkat kematangan diuji dengan sensor-sensor sehingga diperoleh nilai kematangan dalam angka
2
numerik. Angka-angka tersebut dihubungkan satu sama lain sehingga diperoleh persamaan matematis. Persamaan inilah yang akan menjadi penentu keputusan robot untuk memanen suatu buah.Selain kecerdasan, robot pemanen dibutuhkan juga kecepatan dan ketepatan. Gerakan yang cepat berpengaruh terhadap kapasitas suatu robot. Ketepatan menentukan tingkat kebenaran maupun tingkat kesalah suatu robot. Diharapkan kecepatan dan ketepatan suatu robot lebih besar dibandingkan manusia. Untuk itu penelitian mengenai robot pemanen perlu terus dikembangkan agar mampu mewujudkan harapan tersebut. Alasan lain pentingnya pengembangan robot pemanen , yaitu meningkatnya upah tenaga kerja saat panen raya karena jumlah tenaga panen tidak sebanding dengan luas area pertanian yang akan dipanen, ketidakstabilan emosi pekerja yang sering mengakibatkan pemogokan, serta peningkatan ilmu pengetahuan dan teknologi agar tidak tertinggal dengan negara lain.
Oleh karena itu, perlu dilakukan penelitian untuk meningkatkan dan mengembangkan ilmu dan teknologi robotik khususnya dalam bidang pertanian. Salah satu struktur dasar yang sangat penting pengaruhnya terhadap keberhasilan robot dalam melakukan tugasnya yaitu manipulator.
Manipulator yang menjadi objek penelitian ini adalah manipulator untuk robot pemanen buah dalam greenhouse. Pada penelitian ini dilakukan modifikasi manipulator tipe silinder yang dibuat oleh
Graha (2007) dan telah dimodifikasi pertama oleh Saleh (2008). Pada manipulator yang telah ada untuk mencapai koordinat bidang horisontal menggunakan prismatic joint. Sistem ini batang link
horizontal akan memendek pada sisi target, namun pada sisi lainnya akan memanjang. Sisi yang
memanjang dapat mengganggu tanaman di sisi lain tanaman target. Modifikasi dilakukan pada gerakan perismatik joint pada gerakan horisontal menjadi gerakan rotational joint. Mekanisme ini diharapkan dapat menghasilkan kebutuhan ruang pergerakan yang lebih sempit dan tidak mengganggu tanaman selain target.
1.2 Tujuan
Tujuan yang akan dicapai dari penelitian ini adalah
1. Memodifikasi manipulator tipe silinder untuk robot pemanen buah dalam greenhouse sehingga dihasilkan manipulator ruang pergerakan yang lebih sempit dan tidak mengganggu tanaman selain target.
2. Menguji ketelitian manipulator robot pemanen buah dalam menjangkau target dalam koordinat ruang dengan beberapa pembebanan.
3
II. TINJAUAN PUSTAKA
2.1 Greenhouse
Menurut Suhardiyanto (2009) greenhouse pada umumnya dibangun menggunakan kaca sebagai atap dan dinding. Itulah sebabnya greenhouse lebih identik dengan glasshouse kemudian diterjemahkan sebagai rumah kaca. Namun dalam perkembangnnya, penggunaan kaca sebgaai bahan penutup greenhouse sudah jauh tertinggal dibandingkan dengan penggunaan plastik. Sehingga, istilah rumah kaca sebagai terjemahan dari greenhouse sudah kurang tepat lagi. Agar lebih mencerminkan fungsi greenhouse sebagai bangunan pelindung tanaman maka greenhouse dikenal sebagai rumah tanaman. Penggunaan greenhouse dalam budidaya tanaman merupakan salah satu cara untuk memberikan lingkungan yang lebih mendekati kondisi optimum bagi pertumbuhan tanaman. Di dalam
greenhouse, parameter lingkungan yang berpengaruh terhadap pertumbuhan tanama yaitu cahaya
matahari, suhu udara, kelembabanudara, pasokan nutrisi, kecepatan angin, dan konsentrasi karbondioksida dapat dikendalikan dengan lebih mudah. Penggunaan greenhouse memungkinkan dilakukannya modifikasi lingkungan yang tidak sesuai bagi pertumbuhan tanaman menjadi lebih mendekati kondisi optimum bagi pertumbuhan tanaman.
2.2 Robot Bio-Produksi
Pengertian robot bioproduksi belum didefinisikan dengan jelas oleh para ahli yang berhubungan dengan bidang ini. Apa yang dimaksud dengan robot bio-produksi masih menjadi subjek diskusi. Secara garis besar, robot bio-produksi memiliki struktur dasar anatara lain: manipulator,
end-effector, vision sensor, traveling device, kontrol device, dan actuator. Robot bio-produksi harus
mampu membedakan target dan non-target, karena letak target yang acak. Berbeda halnya dengan robot industri yang letak targetnya selalu tetap, sehingga tidak membutuhkan kemampuan untuk membedakan target dan non-target. Robot bio-produksi dirancang untuk menangani tanaman, binatang, makanan, dan objek bilogi lainnya. Oleh karena itu, perlu pengetahuan mengenai karakteristik objek biologis. Aspek sosial seperti ekonomi, manajemen, pemasaran, dan tingkat penerimaan masyarakat terhadap teknologi ini juga perlu dipertimbangkan (Kondo dan Ting, 1998).
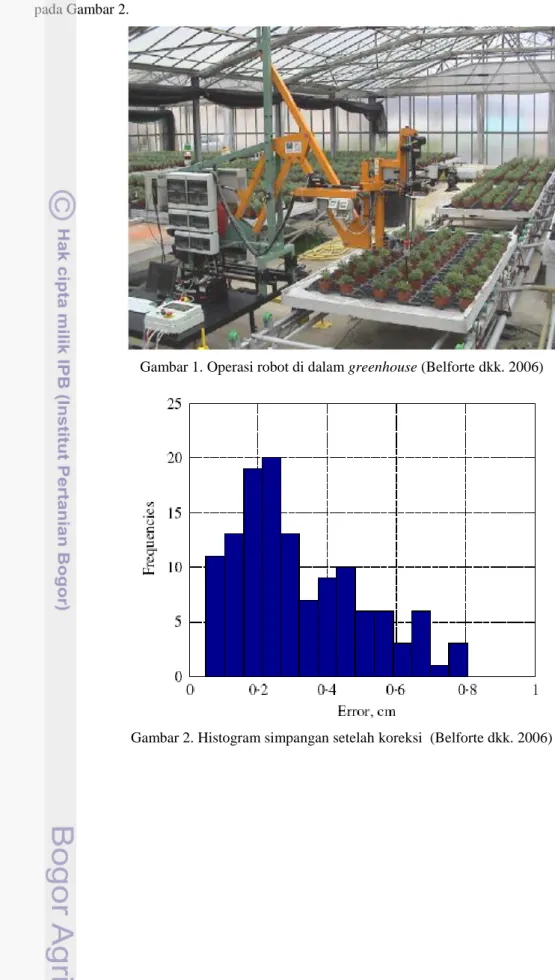
Belforte dkk. (2006) meneliti dan mendesain robot untuk aplikasi greenhouse. Robot yang dikembangkan memiliki tiga derajat bebas terdiri dari dua perismatik joint (joint 1 dan joint 3) serta satu rotational joint. Besar gerakan joint 1 dibaca dengan menggunakan digital encoder sedangkan
joint lainnya menggunakan potensiometer. Ruang yang dibutuhkan robot untuk bermanufer antara
1-2 m². Gambar robot aplikasi dalam grrenhouse hasil penelitian Belforte dkk (2006) dapat dilihat pada Gambar 1. Penentuan koordinat target menggunkan kamera CCD, posisi end-effector dilakukan
4
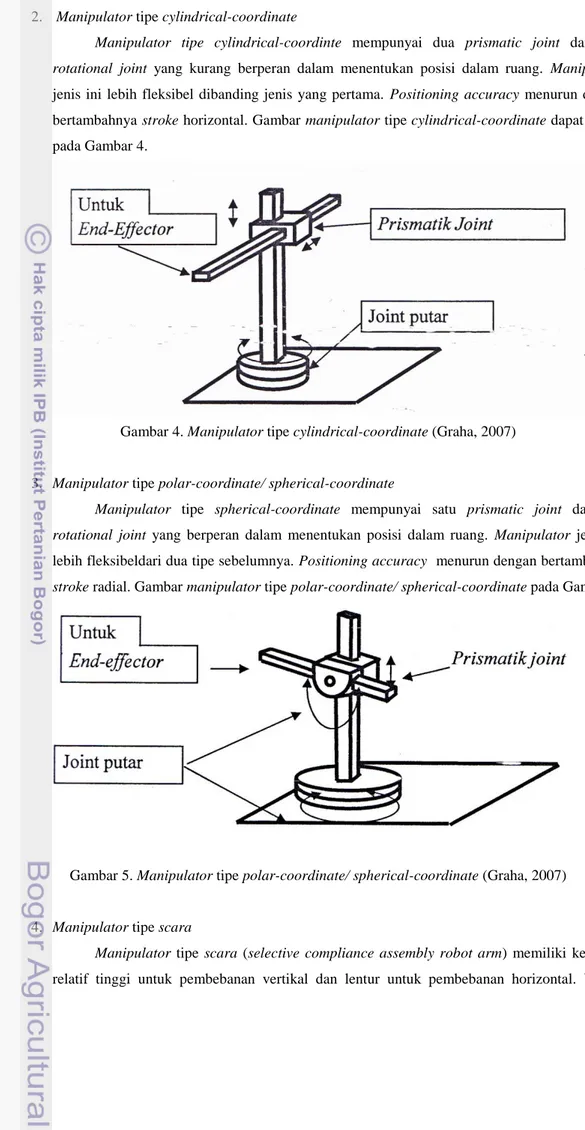
koreksi (loop tertutup) setelah koordinat tercapai. Besar simpangan hasil pengujian robot dapat dilihat pada Gambar 2.Gambar 1. Operasi robot di dalam greenhouse (Belforte dkk. 2006)
5
2.2 Manipulator
Berdasarkan Japanese Industrial Standard (JIS B0134-1986, Terms for Industrial robot),
manipulator adalah peralatan yang mempunyai fungsi sama dengan lengan manusia dan dapat
memindahkan benda dalam ruang tiga dimensi.
Banyak yang mengira bahwa manipulator sama seperti lengan manusia karena mempunyai fungsi hampir sama dengan lengan manusia. Tetapi pada kenyataanya mekanismenya tidak selalu sama. Beberapa tipe manipulator yang umum dikenal antara lain: cartesian coordinate, cylindrical
coordinate, scara, manipulator tipe polar, dan tipe antropomorphic.
Menurut Okamoto (1992) diacu dalam Graha (2007) banyaknya sambungan yang mempengaruhi posisi dan oriantasi ujung manipulator. Supaya dapat bergerak dalam ruang tiga dimensi, manipulator membutuhkan minimal tiga derajat bebas. Semakin besar jumlah derajat bebas, akan semakin kompleks kontruksi robot dan semakin sulit untuk mengontrol sistem. Mekanisme dasar
manipulator dapat diubah sesuai dengan jumlah derajat bebas, tipe joint, panjang link, dan panjang offset.
Manipulator tersusun atas link dan joint. Mobilitas manipulator dijamin dengan adanya joint
(sambungan) anatara dua titik. Pada suatu rantai kinematik terbuka, tiap sambungan prismatik atau sambungan putar menyediakan derajat mobilitas tunggal. Derajat mobilitas manipulator tersalur sepanjang struktur mekanisnya untuk menyediakan derajat bebas yang diperlukan dalam melakukan pekerjaan.
Jenis-jenis manipulator antara lain :
1. Manipultor tipe cartesian-coordinate/ rectangular-coordinate
Manipulator tipe cartesian coordinate mempunyai tiga prismatic joint yang berperan
dalam menetapkan posisi dalam ruang. Mekanisme dan kontrol manipulator ini mudah, tetapi kurang fleksibel. Manipulator jenis ini mempunyai nilai keakuratan yang lebih tinggi dibandingkan dengan manipulator jenis lain. Gambar manipultor tipe cartesian-coordinate/
rectangular-coordinate dapat dilihat pada Gambar 3.
6
2. Manipulator tipe cylindrical-coordinateManipulator tipe cylindrical-coordinte mempunyai dua prismatic joint dan satu rotational joint yang kurang berperan dalam menentukan posisi dalam ruang. Manipulator
jenis ini lebih fleksibel dibanding jenis yang pertama. Positioning accuracy menurun dengan bertambahnya stroke horizontal. Gambar manipulator tipe cylindrical-coordinate dapat dilihat pada Gambar 4.
Gambar 4. Manipulator tipe cylindrical-coordinate (Graha, 2007)
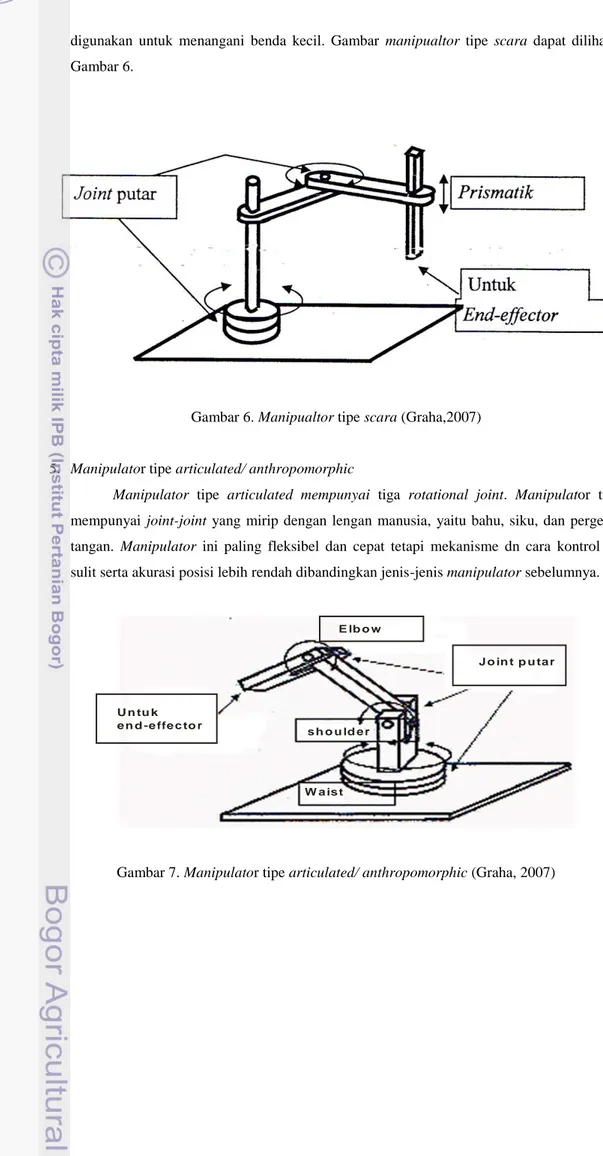
3. Manipulator tipe polar-coordinate/ spherical-coordinate
Manipulator tipe spherical-coordinate mempunyai satu prismatic joint dan dua rotational joint yang berperan dalam menentukan posisi dalam ruang. Manipulator jenis ini
lebih fleksibeldari dua tipe sebelumnya. Positioning accuracy menurun dengan bertambahnya
stroke radial. Gambar manipulator tipe polar-coordinate/ spherical-coordinate pada Gambar 5.
Gambar 5. Manipulator tipe polar-coordinate/ spherical-coordinate (Graha, 2007)
4. Manipulator tipe scara
Manipulator tipe scara (selective compliance assembly robot arm) memiliki kekuatan
7
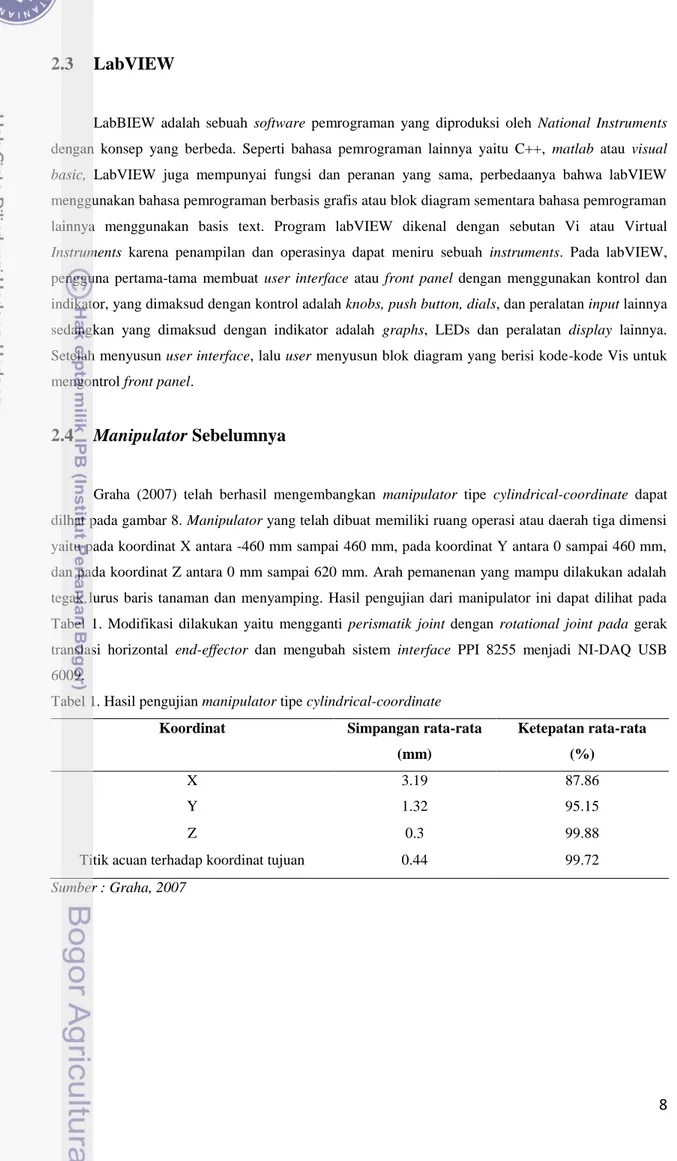
digunakan untuk menangani benda kecil. Gambar manipualtor tipe scara dapat dilihat pada Gambar 6.Gambar 6. Manipualtor tipe scara (Graha,2007)
5. Manipulator tipe articulated/ anthropomorphic
Manipulator tipe articulated mempunyai tiga rotational joint. Manipulator tipe ini
mempunyai joint-joint yang mirip dengan lengan manusia, yaitu bahu, siku, dan pergelangan tangan. Manipulator ini paling fleksibel dan cepat tetapi mekanisme dn cara kontrol makin sulit serta akurasi posisi lebih rendah dibandingkan jenis-jenis manipulator sebelumnya.
U n tu k e n d -e ffe c to r s h o u ld e r W a is t J o in t p u ta r E lb o w
8
2.3 LabVIEW
LabBIEW adalah sebuah software pemrograman yang diproduksi oleh National Instruments dengan konsep yang berbeda. Seperti bahasa pemrograman lainnya yaitu C++, matlab atau visual
basic, LabVIEW juga mempunyai fungsi dan peranan yang sama, perbedaanya bahwa labVIEW
menggunakan bahasa pemrograman berbasis grafis atau blok diagram sementara bahasa pemrograman lainnya menggunakan basis text. Program labVIEW dikenal dengan sebutan Vi atau Virtual
Instruments karena penampilan dan operasinya dapat meniru sebuah instruments. Pada labVIEW,
pengguna pertama-tama membuat user interface atau front panel dengan menggunakan kontrol dan indikator, yang dimaksud dengan kontrol adalah knobs, push button, dials, dan peralatan input lainnya sedangkan yang dimaksud dengan indikator adalah graphs, LEDs dan peralatan display lainnya. Setelah menyusun user interface, lalu user menyusun blok diagram yang berisi kode-kode Vis untuk mengontrol front panel.
2.4 Manipulator Sebelumnya
Graha (2007) telah berhasil mengembangkan manipulator tipe cylindrical-coordinate dapat dilhat pada gambar 8. Manipulator yang telah dibuat memiliki ruang operasi atau daerah tiga dimensi yaitu pada koordinat X antara -460 mm sampai 460 mm, pada koordinat Y antara 0 sampai 460 mm, dan pada koordinat Z antara 0 mm sampai 620 mm. Arah pemanenan yang mampu dilakukan adalah tegak lurus baris tanaman dan menyamping. Hasil pengujian dari manipulator ini dapat dilihat pada Tabel 1. Modifikasi dilakukan yaitu mengganti perismatik joint dengan rotational joint pada gerak translasi horizontal end-effector dan mengubah sistem interface PPI 8255 menjadi NI-DAQ USB 6009.
Tabel 1. Hasil pengujian manipulator tipe cylindrical-coordinate
Koordinat Simpangan rata-rata
(mm) Ketepatan rata-rata (%) X 3.19 87.86 Y 1.32 95.15 Z 0.3 99.88
Titik acuan terhadap koordinat tujuan 0.44 99.72
9
Gambar 8. Manipulator yang telah ada dan akan dimodifikasi (Graha, 2007)10
III. PENDEKATAN DISAIN
3.1. Kriteria Disain
Manipulator direncanakan untuk robot pemanen buah di dalam greenhouse sehingga manipulator harus mampu bergerak dan mencapai ruang tumbuh yang tersedia. Beberapa buah yang
sering dibudidayakan di dalam greenhouse, yaitu melon, tomat, dan semangka. Terdapat beberapa metode penanaman yang sering dipakai dalam kegiatan budidaya tanaman buah-buahan. Untuk kegiatan lapangan pada suatu area atau petakan lahan dipersiapkan bedengan dan parit. Pembuatan bedengan dan parit dimaksudkan untuk menghindarkan tanaman dari banjir atau air tergenang. Parit atau ruang antar bedengan sering digunakan untuk jalan saat kegiatan perawatan tanaman. Tanaman biasanya ditanam di atas bedengan yang terdiri dari beberapa baris tanaman maupun satu baris tanaman tergantung kebutuhan. Menurut Prajnanta (2004) jarak tanam suatu komoditas yang sama sering digunakan jarak tanam yang berbeda tergantung hasil yang dinginkan. Pemilihan jarak tanam yang lebih sedikit luas dibanding rata-rata dapat menghasilkan buah yang lebih besar. Hal ini berpengaruh terhdap kompetisi unsur ahara dan ruang tumbuh. Umumnya petani buah melon untuk diekspor menggunakan jarak tanam 85 cm x 70 cm dengan jumlah satu baris tanam per bedengan agar dihasilkan buah melon dengan berat rata-rata 1.5 kg. Tinggi bedengan terendah untuk budidaya melon sebesar 30 cm dengan ketinggian turus 75 cm.
Budidaya dalam greenhouse sering digunakan penanaman dengan menggunakan suatu wadah seperti polybag, kotak kayu, maupun pipa paralon. Penggunaan wadah tersebut dimaksudkan untuk efisiensi penggunaan air dan pupuk. Walaupun penanaman dilakukan pada suatu wadah, jarak antara tanaman satu dan lainnya umumnya mengacu pada jarak tanam yang sesuai dengan jenis komoditas yang dibudidayakan. Dalam suatu greenhouse tentunya juga disediakan jalan untuk kegiatan perawatan. Lebar jalan yang tersedia disesuaikan dengan jarak antar baris tanaman atau sesuai dengan kebutuhan kegiatan perawatan tanaman. Robot pemanen harus mampu bekerja sesuai dengan ruang yang tersedia serta mampu menjangkau target.
Modifikasi dilakukan terhadap manipulator tipe silinder yang telah berhasil dibuat oleh Graha (2007). Mekanisme gerak horizontal manipulator yang digunakan untuk mendekati target berupa
slider horizontal (Gambar 8). Masalah yang terjadi pada mekanisme seperti ini yaitu ketika digunakan
pada greenhouse yang memiliki lebar jalan yang sempit. Ketika manipulator bergerak menjangkau target dengan jarak yang dekat terhadap sumbu manipulator, maka jarak horizontal end-effector memendek, sedangkan pada sisi lain ujung slider horizontal akan memanjang sehingga dapat mengenai tanaman atau benda lainnya yang berada di arah berlawanan target. Kelemahan lain adalah luas jangkauan koordinat bidang XY hanya menjangkau dua kuadran yaitu kuadran I (x-positif, y-positif) dan kuadran II (x-negatif,y-y-positif).
11
Pada mekanisme slider horizontal perlu dilakukan modifikasi dengan mekanisme kombinasi dua batang besi (seperti pada hubungan lengan atas dan lengan bawah manusia). Jarak jangkauan target terhadap sumbu horizontal ditentukan oleh besar sudut yang terbentuk oleh dua buah plat besi. Mekanisme seperti ini diharapkan dapat mengurangi kebutuhan ruang gerak manipulator dan jangkauan koordinat yang lebih luas saat beroperasi di dalam greenhouse.Selain mekanisme slider horizontal makanisme lain tetap menggunakan rancangan yang telah dibuat oleh Graha (2007). Pemodifikasian lain yang juga dilakukan adalah pada sistem interface. Sistem interface yang digunakan oleh Graha (2007) dan Saleh (2008) yaitu PPI 8255 dihubungkan ke komputer melalui slot ISA komputer. Kesulitan dari metode tersebut adalah bahwa tidak tersedianya slot ISA pada komputer-komputer keluaran terbaru sehingga sistem interface PPI 8255 dalam penelitian ini perlu diganti dengan menggunakan NI-DAQmx model usb 6009 yang terhubung pada USB komputer dengan menggunakan program LabView untuk pemrograman algoritma pengendalian
manipulator.
3.2. Rancangan Fungsional
Manipulator yang dibuat berfungsi untuk menjangkau benda dalam ruang tiga dimensi sesuai
dengan koordinat yang diinginkan. Karena merupakan robot pemanen maka benda disini merupakan buah yang masih terdapat dipohonya, sehingga ujung manipulator ini nantinya akan dipasangi dengan
end-effector untuk memanen buah tersebut.
Untuk mendukung fungsi tersebut maka diperlukan komponen-komponen lain yang saling berkaitan agar manipulator yang dibuat dapat bekerja sesuai dengan fungsinya. Komponen-komponen tersebut beserta fungsinya antara lain:
1. Dudukan bawah
Dudukan bawah berfungsi sebagai tempat menompang seluruh bagian manipulator. Dudukan bawah terdiri dari komponen dengan fungsi masing-masing antara lain:
a. Roda bebas (caster)
Roda bebas (caster) berfungsi untuk mempermudah dalam pemindahan
manipulator (portable).
b. Plat beton
Plat beton berfungsi sebagai dudukan dari gearbox, sehingga boleh dikatakan plat besi ini menopang seluruh bagian manipulator.
2. Joint putar horizontal 1 (joint 1)
Joint putar horizontal 1 befungsi memutar manipulator pada sumbu putar atau titik poros pada bidang datar horizontal. Bidang datar horizontal mencakup koordinat x da y juga koordinat –x dan y. Sehingga titik poros putar joint 1manipulator merupakan titik acuan yaitu koordinat (0,0). Komponen yang menyusun joint sudut antara lain:
12
a. GearboxGearbox berfungsi untuk merubah arah putaran poros dari arah mendatar menjadi tegak lurus terhadap sumber putaran. Gearbox juga berfungsi sebagai sumbu putar atau titik poros dari manipulator. Gearbox juga mereduksi putaran yang dihasilkan oleh motor stepper dengan perbandingan 1 : 10.
b. Motor stepper
Motor stepper berfungsi sebagai acutuator pada joint 1 yang memutar
manipulator pada sumbu putar atau titik poros pada bidang datar horizontal. c. Dudukan motor stepper
Dudukan motor stepper berfungsi untuk menahan motor stepper sehingga dapat menyalurkan daya ke gearbox.
d. Kopel
Kopel berfungsi menghubungkan poros motor stepper yang berdiameter 8 mm dengan poros gearbox yang berdiameter 10 mm.
e. Plat poros besi
Plat poros besi berfungsi menggabungkan poros output dari gearbox dengan plat dudukan dari link vertikal.
3. Link vertikal
Link vertikal berfungs sebagai duduka dari link horizontal. Link vertikal menopang link horizontal yang bekerja naik atau turun untuk menjangkau koordinat dalam arah vertikal
(koordinat z). Komponen-komponen penyusun link vertikal antara lain: a. Plat dudukan
Plat dudukan terdapat dibagian atas maupun bagian bawah dari link vertikal. Plat dudukan ini berfungsi sebagai dudukan bearing (penopang ulir) dan plat siku (penopang
slider vertikal).
b. Plat siku
Plat siku berfungsi sebagai penumpu dari slider vertikal. c. Bantalan
Bantalan adalah elemen mesin yang menumpu poros berbeban, sehinggga putaran atau gerakan bolak-baliknya dpaat berlangsung secara halus, aman, dan panjang umur (Sularso dan Suga, 1987). Bantalan pada rancangan ini berfungsi sebagai komponen yang menumpu poros ulir.
d. Slider vertikal
Slider vertikal berfungsi sebagai track (lintasan) bagi gerakan naik dan turunnya link horizontal.
e. Ulir
Ulir berfungsi sebagai sistem tranmisi pendorong turun atau naik bagi joint
horizontal. Putaran dari ulir ini yang dapat menyebabkan joint horizontal dapat
13
4. Joint translasi vertikal (joint 3)Joint translasi vertikal berfungsi memutar poros ulir, sehingga dudukan dari link horizontal dapat bergerak naik dan turun. Joint tranlasi vertikal menggerakan link horizontal
naik dan turun untuk menjangkau koordinat dalam arah vertikal (koordinat z). Joint 3 terdiri dari:
a. Motor servo DC
Motor servo DC berfungsi sebagai actuator pada joint 3 yang memutar poros berulir melalui worm-gear. Motor servo DC sudah dilengkapi encoder dan brake (rem).
Encoder befungsi untuk mengetahui sudut putar dari motor servo DC, sehingga
pergerakan joint horizontal dalam arah vertikal dapat diketahui atau diukur. Rem berfungsi untuk menghentikan, mengatur dan mencegah putaran yang tidak dikehendaki pada putaran motor servo DC.
b. Dudukan motor servo DC
Dudukan motor servo DC berfungsi untuk menahan motor servo sehingga dapat menyalurkan dayanya ke worm-gear.
c. Worm-gear
Worm-gear berfungsi mereduksi putaran dari motor servo DC untuk disalurkan
ke poros berulir. 5. Link horizontal
Link horisontal berfungsi menjangkau koordinat dari sasaran r melalui sudut tertentu
yang terbentuk dari dua buah plat besi. Koordinat r merupakan jarak mendatar tertentu diukur dari link vertikal (sumbu z). Titik pangkal link horisontal berada pada link vertikal serta ujungnya merupakan tempat dudukan end-effector. Komponen penyusun link horisontal antara lain :
a. Kotak segiempat
Kotak segiempat berfungsi sebagai penghubung antara link vertikal dengan link
horisontal. b. Plat besi
Plat besi digunakan dua buah yang berfungsi sebagai penentu jarak mendatar
end-effector dari link vertikal. Jarak ini ditentukan oleh besar sudut yang terbentuk
antara dua batang tersebut. 6. Joint putar horizontal 2 (joint 2)
Joint putar ini berfungsi untuk memutar salah satu plat besi agar terbentuk sudut tertentu.
a. Motor DC berfungsi sebagai aktuator pada joint2.
b. Pembaca sudut berfungsi untuk mengetahui besar sudut yang terbentuk antara dua palt besi.
14
7. Sistem kendalia. Power supply
Power supply berfungsi memberikan catu daya bagi rangkaian-rangkaian
elektronika penunjang dan motor-motor penggerak pada manipulator. b. Rankaian pengendali motor DC
Rangkaian pengendali motor DC berfungsi mengendalikan motor on-off dan arah putaran motor. Rangkaian ini dilengkapi limit switch untuk keamanan dan titik acuan.
8. Sistem interface
Interface berfungsi sebagai penghubung antara komputer (controler) dengan rangkaian
luar seperti rangkaian pengendali motor dan pembaca pulsa encoder. 9. Kontroller
Kontroller berfungsi sebagai pengendali seluruh kinerja dari manipulator.
3.3. Rancangan Struktural
3.3.1. Rancangan Struktural Bagian yang Tidak Dimodifikasi
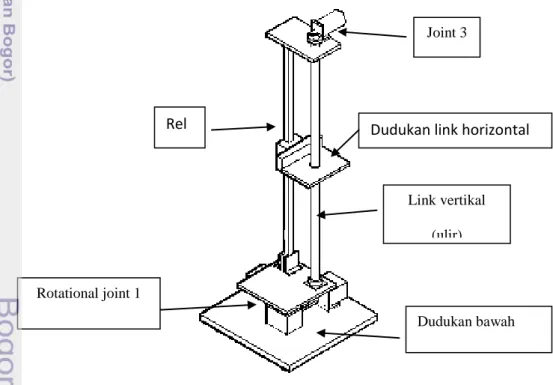
Bagian manipulator yang tidak dimodifikasi tetap mempertahankan yang telah ada. Gambar 9 menunjukkan bagian-bagian manipulator yang tidak dimodifikasi. Beberapa bagian manipulator tersebut antara lain dudukan bawah, joint 1, link vertikal, joint 3, power suply, rangkaian pengendali motor stepper (joint 1).
Gambar 9. Bagian manipultor yang tidak dimodifikasi.
Dudukan bawah Rotational joint 1
Link vertikal (ulir) Joint 3
15
1. Dudukan bawaha. Roda bebas (caster)
Roda bebas yang digunakan memiliki tinggi 34 mm dengan diameter roda 25 mm. Roda bebas yang digunakan sebanyak 4 buah.
b. Plat beton
Plat beton yang digunakan mempunyai ukuran 400 mm x 400 mm dengan ketebalan 20 mm.
2. Rotational joint 1
Gearbox yang digunakan merupakan sistem tranmisi worm-gear yang mereduksi
putaran dengan perbandingan 1:10. Putaran motor stepper berkurang 10 kali setelah melewati gearbox. Motor stepper yang digunakan adalah jenis motor stepper unipolar dengan torsi maksimum 1.25 Nm.
3. Link vertikal
Slider vertikal yang digunakan berbentuk silinder dan memiliki ukuran 960 mm x 20
mm x 19 mm. Ulir yang digunakan merupakan ulir tenaga jenis ball screw. Ulir dipasang vertikal dan ditumpu oleh dua buah bearing. Panjang poros yang berulir yaitu 880 mm. Diameter dalam ulir 20 mm dan diameter luar 25 mm dengan sudut ulir sebesar 90°.
4. Power supply
Unit ini berupa transformator dan jembatan dioda yang berfungsi untuk merubah tegangan AC menjadi DC. Tegangan yang tersedia adalah 5 V, 12 V, 24 V, dan 64 V. Tegangan 5 V, 12 V, dan 24 V menggunakan ic penstabil tegangan 78xx. Tegangan 64 V dihasilkan langsung dari output transformator.
5. Rangkaian pengendali motor stepper
Rangkaian ini berupa gerbang NAND IC 74LS10, rangkaian switch transistor, dan limit switch untuk keamanan dan titik acuan. Pulsa untuk pergerakan motor steper dihasilkan oleh rangkaian pembangkit pulsa menggunakan IC 555 dengan frekuensi 5.7 kHz.
3.3.2. Rancangan Struktural Bagian yang Dimodifikasi
Rancangan kontruksi manipulator yang dimodifikasi dapat dilihat pada Gambar 10. Bagian-bagain manipulator yang baru antara lain joint 2, link horisontal, interface, kontroler, rangkaian pengendali joint 3.
16
Gambar 10. Bagian modifikasi manipulator1. Joint horizontal (Joint 2)
Motor penggerak yang digunakan adalah motor DC 24 V, 30 rpm. Untuk mengetahui besar sudut perputaran joint digunakan rotational encoder dengan ketelitian 200 pulsa/putaran. Pengendali on-off dan arah putaran motor menggunan rangkaian H-bridge 30 A dengan tegangan input konstan.
2. Link horizontal
Link horizontal tersusun atas dua buah plat besi yang dihubungkan yaitu plat besi I
yang menempel pada joint vertikal dan plat besi II yang berada pada bagian ujung sehingga membentuk rotational joint. Kedua plat besi dihubungkan dengan joint putar yang mampu memutar horizontal. Besar sudut putar dari joint tersebut menentukan jarak jangkauan
end-effector. Plat besi I memiliki ukuran 420 mm x 16 mm x 20 mm. Plat besi II memiliki
ukuran 500 mm x 16 mm x 10 mm. Kedua plat besi dihubungkan dengan poros sebagai pusat rotasi. Poros penghubung tersebut memiliki diameter 14 mm dengan panjang 130 mm dari link horizontal. Jarak jangkauan maksimum mencapai 820 mm. Pada bagian atas dan bawah poros dipasang bearing sebagai penahan agar tidak terjadi bergeseran sumbu putar. 3. Interface
Interface terhubung pada USB komputer dengan menggunakan NI-DAQmx model
USB 6009 seperti terlihat pada gambar 11. NI-DAQ digunakan sebagai interface karena alat ini dapat dihubungkan pada USB komputer, pengontrolan digital input-output dapat dilakukan melalui kofigurasi nilai dgital 8 bit menggunakan hexadesimal maupun langsung mengirimkan atau membaca nilai logika pada titik-titik jalur digital input-output. Interface ini memiliki bentuk yang kompak dengan ukuran yang kecil sehingga lebih mudah untuk penggunaan di lapangan. Plat besi I (terpasang pada link vertikal) Plat besi II (ujung bebas) Joint 2 encoder Motor DC
17
4. KontrolerSebagai unti kontroler digunakan komputer yang dilengkapi dengan USB untuk pemasangan unit interface. Program yang digunakan untuk pengontrolan interface NI-DAQ adalah program-program yang dikembangkan oleh Nasional Instrumen, salah satunya yaitu program LabView. Komputer yang digunakan dalam penelitian ini merupakan Laptop Dual Core dengan sistem opersai Windows 7. Komputer dilengkapi dengan program LabView untuk pemrograman algoritma pengendalian manipulator. Spesifikasi NI-DAQ 6009 dapat dilihat pada Lampiran 40.
Gambar 11. Ni-DaQ usb 6009
3.4. Analisis Teknik
Analisis teknik dilakukan terhadap bagian yang akan dimodifikasi yaitu pergerakan link
horizontal untuk gerakan end-effector secara horizontal. Bagian-bagian lainnya mengacu pada (Graha,
2007) yang telah berhasil membuat manipulator yang akan dimodifikasi. Selain itu, modifikasi juga dilakukan terhadap sistem interface yang sebelumnya menggunakan interface yang terhubung pada slot ISA dengan pemrograman algoritma menggunakan bahasa C diganti dengan interface yang terhubung pada USB dengan menggunakan NI-DAQmx model USB 6009 dan pemrograman LabView.
1. Link horizontal
Link horizontal berupa rangkaian dua buah plat besi. Besi pertama menghubungkan
antara link vertikal dan motor joint horizontal (Joint 2) sedangkan plat besi kedua menghubungkan antara motor joint horizontal dan end-effector. Beban yang ditumpu plat besi pertama adalah berat motor, plat besi kedua, end-effector, dan berat plat besi itu sendiri. Beban tersebut berupa beban bending yang dapat dihitung sebagai berikut :
Jika massa maksimum plat besi kedua, motor joint horizontal, dan end-effector berjumlah 10 kg. Jarak link vertikal terhadap joint horizontal (ujung plat besi kesatu) adalah
18
450 mm. Tegangan geser yang diijinkan 165 Mpa. Analisis terhadap beban bending menggunakan Persamaan 4.1.σ = ... (4.1)
Dimana : σ = tegangan geser yang diijinkan (Pa) M = momen gaya (Nm)
I = momen inersia (m4)
c = setengah ukuran tebal penampang plat (mm)
jika ukuran tebal plat besi ditentukan sebesar 10 mm, maka diperoleh :
I =
=
Dari nilai momen inersia yang diperoleh, ukuran lebar penampang plat besi yang digunakan dapat ditentukan dengan menggunakan Persamaan 4.2.
I =
... (4.2)
dimana : I = momen inersia (mm4)
b = ukuran penampang sisi horizontal (mm) h = ukuran penampang sisi vertikal (mm)
b =
= 0.016 m = 16 mm
Jadi diperoleh ukuran penampang plat besi 16 mm x10 mm agar mampu menahan beban bending dengan pembebanan 10 kg.
Saat kedua plat besi membentuk sudut 900 pada plat besi kesatu akan mengalami beban puntir maksimum. Beban puntir terjadi sebagai akibat dari berat end-effector yang melalui plat besi kedua. Massa end-effector maksimum yang diijinkan yaitu 5 kg. Ukuran penampang yang telah ditentukan di atas dapat dihitung ketahanan terhadap beban puntir dengan Persamaan 4.3.
19
dimana : τm = tegangan puntir yang diijinkan (Pa)T = torsi (Nm)
C = setengah lebar penampang (m) Ip = momen inersia puntir (m4)
Sehingga diperoleh :
Ip =
=
Dari perhitungan di atas diperoleh momen inersia puntir sebesar 1.1 x 10-9 m4 yang hasilnya lebih kecil dibandingkan dengan momen inersia akibat pembebanan bending. Ukuran penampang plat besi yang telah ditentukan mampu menahan beban puntir yang terjadi.
Plat besi I yang digunakan memiliki penampang 16 mm x 20 mm dengan nilai tebal dua kali lebih besar dibandingkan hasil perhitungan. Tujuannya agar lebih aman dan tidak terjadi lendutan dalam penggunaanya serta terlihat lebih kokoh. Penampang plat besi II menggunakan ukuran sesuai hasil perhitungan yaitu 16 mm x 10 mm karena beban yang terima lebih kacil dibandingkan plat besi I.
2. Poros joint 2
Motor DC penggerak joint 2 dipasang pada plat besi I dan memutarkan plat besi II dengan transmisi daya poros langsung. Tegangan kebutuhan motor adalah 24 V dengan arus sebesar 1 A maka diperoleh daya motor sebesar 24 W dengan kecepatan putar 20 rpm.
Menurut Sularso dan K. Suga (1997), untuk menghitung besarnya diameter poros yang digunakan adalah dengan menentukan daya rencana Pd (kW) menggunakan persamaan 4.4.
= ... (4.4)
dimana : P = daya nominal output dari motor penggerak (kW)
fc = faktor koreksi diambil dari tabel faktor koreksi daya (Tabel 2) Tabel 2. Faktor-faktor koreksi daya yang akan ditransmisikan, fc
Daya yang akan ditransmisikan Fc
Daya rata-rata yang diperlukan 1.2 – 2.0 Daya maksimum yang diperlukan 0.8 – 1.2
Daya normal 1.0 – 1.5
Untuk mengetahui meomen puntir atau disebut juga momen rencana (T) dapat digunakan persamaan sebagai berikut :
20
Besarnya tegangan geser yang diinginkan ( ) dapat dihitung dengan persamaan 4.5.=
... (4.5) di mana : = Tegangan geser yang diijinkan (kg.mm)
= Kekuatan tarik (kg/mm²)
= Faktor keamanan dari faktor kelelahan puntir, harga 5.6 bahan SF dan 6.0 bahan S-C
= Faktor bentuk fisik karena pengaruh konsentrasi tegangan dan kekerasan permukaan dengan harga 1.3 sampai 3.0
Dari persamaan di atas diperoleh persamaan untuk menghitung diameter poros seperti pada persamaan 4.6.
ds
=
=
... (4.6) dimana : ds = diameter poros (mm)
Kt = faktor keamanan oleh pengaruh keadaaan momen puntir, besarnya
antara 1.0 sampai 3.0
Cb = faktor pengaruh beban adanya beban lentur oleh transmisi lain,
besarnya antara 1.2 sampai 2.3, bila tidak ada , = 0 daya rencana : = = momen puntir : = = kg.mm
Bahan poros adalah baja difinis dingin (S35C-D), alasan pemakaian adalah poros dapat dibubut, digerinda, dan perlakuan lainnya. Bahan ini memiliki kekuatan tarik = 53 kg/mm², dengan = dan = , maka tegangan geser yang diijinkan :
τ
a
=
kg/mmFaktor koreksi untuk momen puntir adalah Kt = 1.5 dan beban dikenakan secara halus dengan faktor kelenturan Cb = 2. Dari nilai tersebut sehingga diameter poros dapat ditentukan :
=
21
= mmDari hasil perhitungan diperoleh diameter poros minimal 6.8 mm. Poros yang digunakan pada hubungan rotational joint 2 berdiameter 14 mm sehingga cukup aman dalam penggunaannya.
3. Motor link vertikal
Besarnya gaya dorong yang diperlukan untuk mendorong link horizontal dapat dihitung dengan menggunakan rumus Persamaan 4.7.
= ... (4.7)
dimana : F = gaya (N)
M = massa benda (kg)
g = percepatan gravitasi (m/s2)
Besar massa link horizontal dan motor penggerak joint horizontal sebesar 3 kg. Gaya grafitasi sebesar 9.8 m/s2. Sehingga besarnya gaya dorong yang diperlukan:
= =
Jadi gaya yang diperlukan untuk mendorong ke atas link horizontal, joint horizontal, dan end-effector harus lebih besar dari 29,4 N.
Besarnya daya pada motor DC joint vertikal 60 Watt dan putaran motor 3000 rpm, kecepatan sudut dapat diketahui dengan Persamaan 4.8.
ω = π n
... (4.8)
dimana : ω = kecepatan sudut (rad/s) n = kecepatan putar (rpm)
sehingga diperoleh besar kecepatan sudut yang dihasilkan
ω =
ω =
4.14.159 rad/s22
Torsi yang dihasilkan oleh motor DC dapat diketahui melalui Persamaan 4.9.=
... (4.9)dimana : T = Torsi (Nm) P = Daya (Watt)
ω = Kecepatan sudut (rad/s)
sehingga diperoleh besar torsi yang dihasilkan oleh motor DC =
=
Torsi yang dihasilkan oleh motor joint 3 sebessar 0.191 Nm. Perbandingan rasio dan
worm gear yaitu 1:30 dengan efisiensi penyaluran tenaga 99%, sehingga torsi pada ulir dapat
dihitung dengan menggunakan Persamanan 4.10.
Tm =
...(4.10)
di mana : Tm = torsi motor (Nm)
T = torsi untuk mendorong ulir (Nm) η = efisiensi penyaluran tenaga (%) sehingga diperoleh :
= = =
Gaya dorong ulir dapat diketahui dengan perhitungan tenaga ulir (power screw). Persamaan yang digunakan untuk menghitung torsi gaya dorong ulir (Shingley dan Mischke,2001) :
T
=
...(4.5)
dimana : T = torsi pada ulir (Nm) F = gaya dorong ulir (N) dm = diameter effektif ulir (m)
f = koefisien gesek permukaan ulir l = kisar/pitch (m)
23
Ulir yang digunakan dalam desain ini adalah ulir recirculating ball srews. Terdapat bola atau rol yang berputar di antara ulir dengan nut, sehingga gesekan di antaranya akan jauh lebih kecil. Gesekan yang terjadi ini diperkecil lagi dengan pemberian pelumas pada bola atau rol tersebut. Maka koefisien gesek antara ulir dengan nut sebesar 0.11 (Graha, 2007). Ulir memiliki diameter dalam 21 mm dan diameter luar 25 mm. Diameter efektif berada diantara diameter luar dan diameter dalam, sehingga diambil diameter efektif 23 mm. Sudut ulir sebesar 90o dan panjang kisar 10 mm. Berdasarkan persamaan gaya dorong ulir :5.672
=
=
Dari hasil di atas diperoleh gaya angkat yang dihasilkan ulir untuk menggerakkan link dan joint horizontal ke arah atas adalah 34.818 N. Nilai ini lebih besar dibandingkan besar berat link dan joint horizontal dengan besar 29.4 N.
24
IV.
METODE PENELITIAN
4.1 Tempat dan Waktu
Penelitian dilaksanakan pada bulan Februari-Agustus 2011 di Lab. Instrumentasi dan Kontrol, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
4.2 Bahan dan Alat
1. Alat Penelitian
a. Alat untuk pembuatan prototipe, antara lain gerinda potong, las listrik, gerinda tangan, bor listrik, gergaji, obeng, kunci pas, dan kunci ring.
b. Alat untuk pembuatan rangkaian elektronik, antara lain solder, tang potong, multitester, dan osiloskop.
c. Perangkat komputer untuk pembuatan program.
d. Alat ukur yang digunakan untuk pengukuran koordinat ruang terdiri dari penggaris, meteran, dan busur derajat.
2. Bahan Penelitian
Bahan-bahan yang diperlukan dalam penelitian ini antara lain plat besi, gear box, plat aluminium, besi silinder, besi siku, motor stepper, motor DC, pengencang, PCB, rsistor, kapasitor, dioda, trimpot, LED, transistor, trafo, relay, ic, NI-DAQmx model USB 6009, dan kabel.
4.3 Metode
Diagram alir proses penelitian ini dapat dilihat pada lampiran 1. Metode yang digunakan adalah sebagai berikut:
1. Desain konstruksi utama
Proses desain kontruksi dimulai dengan penentuan tipe dan bentuk manipulator yang akan dibuat. Analisis fungsional untuk penentuan fungsi dari setiap komponen utama. Pembuatan sketsa awal untuk menentukan bentuk dan dimensi alat. Perhitungan kekuatan mekanik komponen-komponen penyusun konstruksi utama. Penentuan kebutuhan daya untuk mekanisme gerak manipulator. Pembuatan dan pengujian konstruksi yang telah direncanakan.
2. Desain komponen elektronik
Pembuatan dan perakitan komponen-komponen elektronik sebagai pendukung pergerakan manipulator. Analisis fungsional dilakukan untuk menentukan fungsi dari bagian
25
komponen elektronik yang akan mendukung fungsi utama. Penentuan jenis-jenis komponen elektronik yang digunakan. Pembuatan dan pengujian komponen elektronik yang telah direncanakan.3. Penyusunan program komputer
Penyusunan program komputer diawali dengan pembuatan algoritma perintah-perintah pergerakan manipulator. Perintah-perintah dijabarkan ke dalam fungsi matematis dan logika. Setelah program selesai, konstruksi utama, komponen elektronik, dan program disatukan serta dilakukan pengujian alat.
4. Kalibrasi
Pergerakan masing-masing joint bersumber dari gerak putar motor DC. Kalibrasi dilakukan untuk menentukan jumlah atau lama putaran motor terhadap gerak translasi
prismatic joint. Perputaran motor juga akan mempengaruhi besar sudut putar pada rotational joint. Sudut putar penting untuk menentukan arah pergerakan manipulator dan gerakan
translasi pada siku.
Kalibrasi pada motor steper (motor joint 1) dilakukan untuk mendapatkan hubungan antara lama putaran motor steper (ms) terhadap sudut jangkauan yang dibutuhkan untuk memmbentuk koordinat sumbu x dan sumbu y. Pengukuran lama putaran dilakukan karena frekuensi pulsa yang dihasilkan oleh program hanya sebesar 250 hz dan tidak mampu untuk menggerakkan motor steper. Pengukuran sudut jangkauan aktual dilakukan dengan menggunakan busur derajat.
Kalibrasi pada motor DC pada siku (motor joint 2) dilakukan untuk mendapatkan hubungan antara jumlah pulsa dan besar sudut jangkauan yang dibutuhkan untuk membentuk koordinat sumbu x dan sumbu y. Jumlah pulsa dihasilkan oleh rotational encoder dengan ketelitian 200 pulsa/putaran. Untuk memperbesar ketelitian encoder maka penyusunan program pembacaan encoder dilakukan perhitungan jumlah perubahan logika 0 ke 1 maupun perubahan logika 1 ke 0 sehingga ketelitian encoder menjadi 400 pulsa/putaran. Pengukuran sudut aktual pada joint ini dilakukan dengan menggunakan busur derajat.
Kalibrasi pada motor DC pada pergerakan vertikal (motor joint 3) dilakukan untuk mendapatkan hubungan antara jumlah pulsa dan besar jarak pergerakan (mm) pada sumbu z. Ada tiga metode kalibrasi yang digunakan untuk pergerakan motor joint 3 yaitu penambahan jumlah penghitung pulsa saat sensor encoder membaca logika 1, penambahan penghitung pulsa saat terjadi perubahan logika 0 ke logika 1 pada sensor encoder, dan timer (ms) lama pergerakan pada sumbu z. Penggunan tiga metode ini karena frekuensi pulsa encoder mencapai 25 kHz yang jauh lebih besar dibandingkan kecepatan eksekusi program LabView sebesar 1 kHz. Hasil kalibrasi yang digunakan pada pergerakan manipulator secara keseluruhan adalah metode yang menghasilkan ketepatan yang paling besar. Pengukuran jarak aktual pergerakan sumbu z dilakukan dengan menggunakan meteran.
26
5. Koreksi (penyempurnaan kalibrasi)Persamaan kalibrasi yang diperoleh digunakan untuk menggerakkan masing-masing
joint satu persatu pada koordinat yang diinginkan. Simpangan yang dihasilkan akan
membentuk suatu pola persamaan tertentu. Persamaan ini dimasukkan ke dalam persamaan jumlah atau lama putaran motor sebagai koreksi persamaan kalibrasi.
6. Validasi
Persamaan kalibrasi yang telah dikoreksi digunakan untuk menggerakkan masing-masing joint satu per satu pada koordinat yang diinginkan. Besar simpangan masing-masing-masing-masing joint menjadi nilai error joint tersebut.
7. Perhitungan nilai konfigurasi sudut motor joint 1 dan joint 2
Hasil kalibrasi motor joint 1 dan joint 2 adalah hubungan antara lama perputaran dan jumlah pulsa yang dihasilkan terhadap sudut masing-masing joint. Nilai inputan pergerakan manipulator merupakan koordinat x, y, dan z. Pergerakan sumbu z dihasilkan oleh motor joint 1 sedangkan pergerakan pada bidang x,y merupakan konfigurasi besar sudut putar motor joint 1 dan joint 2. Untuk itu perlu dilakukan kalibrasi nilai koordinat x dan koordinat y terhadap besarnya sudut perputaran.
Persamaan perhitungan konfigurasi sudut joint 1 dan joint 2 disusun berdasarkan dalil sinus dan cosinus. Konfigurasi sudut joint 1 dan joint 2 seperti pada Gambar 12. Persamaan yang dikembangkan sebanyak dua persamaan yang dibedakan oleh nilai koordinat x positif (+) atau koordinat x negatif (-) sehingga persamaan yang dihasilkan dapat menjangkau daerah empat ruang pada bidang xy yaitu ruang I pada koordinat x dan y positif, ruang II pada koordinat x negatif dan koordinat y positif, ruang III pada koordinat x dan y negatif, serta ruang IV koordinat x positif dan koordinat y negatif.
Gambar 12. Segitiga sembarang Dalil sinus:
=
=
... (3.1)
Dalil cosinus :
27
Jika : a = panjang plat besi II (mm)b = panjang plat besi I (mm) α = sudut motor joint 1 (°) γ = sudut motor joint 2 (°) diperoleh :
=
=
= ... (3.3)
Pada koordinat x positif nilai pergerakan sudut motor joint 1 sebesar α dengan arah putar ke kiri. Nilai pergerakan sudut motor joint 2 sebesar (360-γ) dengan arah putar ke kanan. Saat koordinat x negatif nilai perherakan sudut motor joint 1 sebesar (180-α) dan nilai pergerakan sudut motor joint 2 sebesar γ.
8. Pengujian
Pengujian dilakukan untuk mengetahui kemampuan masing-masing joint manipulator dengan menghitung simpangan dan ketepatan antara nilai masukan terhadap nilai aktual. Diagram alir program pengendalian manipulator dapat dilihat pada lampiran 2. Simpangan dihitung dengan Persamaan (3.4)
= ... (3.4) dimana :
= =
=
Ketepatan dihitung dengan mengikuti persamaan (3.5)
= ... (3.5) dimana :
H = jarak seharusnya X = jarak aktual
Pengujian manipulator dilakukan dengan menggunakan dua metode yaitu gerakan manipulator dari posisi limit switch ke titik koordinat dan gerakan titik koordinat ke titik koordinat lainnya. Masing-masing metode tersebut dilakukan dengan tiga variasi pembebanan yaitu tanpa beban, beban 900 g, dan 2200 g. Variasi pembebanan dilakukan untuk memperoleh pengaruh beban terhadap ketelitian manipulator. Besar beban yang digunakan yaitu berdasarkan beban minimum end effector, daya angkat motor joint 3, kekuatan link horisontal, dan kemampuan pondasi agar manipulator tidak terbalik. Pengujian pergerakan dari posisi limit switch ke titik koordinat dilakukan dengan cara memasukkan nilai koordinat tiga dimensi
28
X, Y, dan Z. Penentuan nilai koordinat dilakukan secara acak yang mencakupi empat kuadran bidang X dan Y. Setiap manipulator mencapai titik koordinat tujuan, maka manipulator tersebut harus kambali lagi ke posisi limit switch sebagai titik 0 (titik acuan) masing-masingjoint.
Pengujian manipulator gerakan titik koordinat ke titik koordinat dilakukan untuk mendapatkan simpangan pada pergerakan manipulator dari koordinat input terhadap koordinat aktual yang dicapai tanpa adanya koreksi ke titik acuan. Pengujian hanya dilakukan pada empat titik koordinat tujuan untuk setiap pengujian. Penentuan titik koordinat target dipilih secara acak. Koordinat aktual diukur dengan pengukuran langsung.