MODIFIKASI
TIPE KOORDINAT
KOMODITAS PERTANIAN
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
MODIFIKASI MANIPULATOR
KOORDINAT SILINDER UNTUK ROBOT PEMANEN
KOMODITAS PERTANIAN DALAM GREENHOUSE
SKRIPSI
Oleh : RAHMAT SALEH
F14103084
2008
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
UNTUK ROBOT PEMANEN
GREENHOUSE
MODIFIKASI MANIPULATOR TIPE KOORDINAT SILINDER UNTUK ROBOT PEMANEN KOMODITAS PERTANIAN
DALAM GREENHOUSE
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar SARJANA TEKNOLOGI PERTANIAN
Departemen Teknik Pertanian Fakultas Teknologi Pertanian
Institut Pertanian Bogor
Oleh :
RAHMAT SALEH F14103084
2008
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR FAKULTAS TEKNOLOGI PERTANIAN
MODIFIKASI MANIPULATOR TIPE KOORDINAT SILINDER UNTUK ROBOT PEMANEN KOMODITI PERTANIAN
DALAM GREENHOUSE
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar SARJANA TEKNOLOGI PERTANIAN
pada Departemen Teknik Pertanian Fakultas Teknologi Pertanian
Institut Pertanian Bogor
Oleh : RAHMAT SALEH
F14103084
Dilahirkan pada tanggal 6 Mei 1985 di Magelang
Tanggal Lulus : Januari 2008 Menyetujui,
Bogor, Januari 2008 Dosen Pembimbing Akademik
Dr. Ir. I Dewa Made Subrata, M.Agr. NIP. 131 685 548
Mengetahui,
Dr. Ir. Wawan Hermawan, M.S Ketua Departemen Teknik Pertanian
RIWAYAT HIDUP PENULIS
Penulis dilahirkan di Magelang pada tanggal 6 Mei 1985 yang merupakan anak pertama dari bapak yang bernama Purwantoro dan ibu bernama Nurhidayah. Penulis menyelesaikan pendidikan sekolah dasar di SD Negeri Wates 1, Magelang pada tahun 1997. Penulis lalu melanjutkan pendidikan menengah di SLTP Negeri 3 Magelang dan tamat pada tahun 2000. Setelah itu, penulis melanjutkan pendidikan tingkat atas di SMU Negeri 2 Magelang dan tamat pada tahun 2003. Pada tahun 2003 itu juga, penulis melalui jalur Undangan Seleksi Masuk IPB (USMI) diterima di Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor dan memilih bagian Ergonomika dan Elektronika.
Selama menjadi mahasiswa di Institut Pertanian Bogor, penulis aktif berorganisasi di Dewan Perwakilan Mahasiswa Fakultas Teknologi Pertanian (DPM-Fateta) di Departemen Informasi dan Komunikasi pada tahun kepengurusan 2004 – 2005 dan Badan Eksekutif Mahasiswa Fakultas Teknologi Pertanian (BEM-Fateta) sebagai ketua Sub-Divisi Biro Pengembangan Organisasi pada tahun kepengurusan 2005 – 2006.
Penulis juga pernah mewakili IPB di ajang Kontes Robot Cerdas Indonesia 2006 sebagai Anggota tim Robot “Run-Tank” (divisi beroda).
Penulis melakukan praktek lapangan di PT Perkebunan Nusantara VIII pada tahun 2006 dengan judul “Aspek Keteknikan dalam Pengolahan Teh di PTPN VIII Gedeh, Cianjur, Jawa Barat ”. Sebagai salah satu syarat memperoleh gelar Sarjana Teknologi Pertanian, penulis menyelesaikan Skripsi yang berjudul ”Modifikasi Manipulator Tipe Koordinat Silinder untuk Robot Pemanen Buah
i KATA PENGANTAR
Syukur dan pujian bagi pemilik segala kesempurnaan, Allah SWT yang Maha Agung. Sholawat dan salam bagi manusia yang termulia dan suri tauladan hidup bagi umat manusia, Muhammad SAW. Karena dengan izin dan atas segala rahmat-Nya penulis dapat menyelesaikan Usulan Penelitian yang berjudul Modifikasi Manipulator Tipe Koordinat Silinder Untuk Robot Pemanen Komoditas Pertanian Dalam Greenhouse. Penyusunan usulan penilitian ini merupakan salah satu syarat untuk melakukan penelitian pada Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Usulan Penelitian ini tersusun atas kerjasama dan bimbingan orang-orang yang telah membantu penulis selama penyusunan. Kepada mereka penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Dr. Ir. I Dewa Made Subrata, M.Agr., selaku dosen pembimbing akademik yang telah memberikan arahan dan bimbingan selama penyusunan skripsi ini.
2. Dr. Ir. Suroso. M.Agr. dan Ir. Mad Yamin, M.T. selaku dosen penguji yang telah memberikan masukan berharga kepada penulis demi perbaikan skripsi ini.
3. Orang tua dan saudara atas segala do’a dan dukungannya.
4. Teman-teman dari keluarga besar TEP ’40 atas do’a dan motivasinya.
5. Semua pihak yang telah banyak membantu namun tidak dapat disebutkan satu-persatu.
Semoga karya tulis ini dapat berguna bagi pihak-pihak yang berkepentingan dan penulis sangat mengharapkan saran dan kritik demi kesempurnaan karya tulis ini. Terima kasih.
Bogor , Januari 2008
DAFTAR ISI Halaman KATA PENGANTAR ... i DAFTAR ISI ... ii DAFTAR GAMBAR ... iv DAFTAR TABEL ... vi
DAFTAR LAMPIRAN ... vii
I. PENDAHULUAN ... 1
A. LATAR BELAKANG ... 1
B. TUJUAN ... 3
II. TINJAUAN PUSTAKA ... 4
A. ROBOT BIO-PRODUKSI ... 4
B. MANIPULATOR ... 4
C. ROBOT BIO-PRODUKSI (penelitian sebelumnya) ... 9
D. GREENHOUSE ... 9
III. METODOLOGI PENELITIAN ... 11
A. WAKTU DAN TEMPAT ... 11
B. ALAT DAN BAHAN ... 11
C. TAHAPAN PENELITIAN ... 12
D. METODE MODIFIKASI ... 12
E. METODE PENGUJIAN ... 14
IV. PENDEKATAN DISAIN ... 19
A. KRITERIA DISAIN ... 19
B. RANCANGAN FUNGSIONAL... 20
C. RANCANGAN STRUKTURAL ... 24
D. ANALISIS TEKNIK ... 30
E. ANALISIS MODIFIKASI MANIPULATOR... 30
V. HASIL DAN PEMBAHASAN ... 36
A. KONSTRUKSI PROTOTIPE MANIPULATOR ... 36
B. KALIBRASI ... 44
iii
E. PENGUJIAN POINT TO POINT ... 55
VI. KESIMPULAN DAN SARAN ... 61
A. KESIMPULAN ... 61
B. SARAN ... 62
DAFTAR PUSTAKA ... 63
DAFTAR GAMBAR
Halaman
Gambar 1. Robot pemanen Apel ... 4
Gambar 2. Simbol Joint (JIS) ... 5
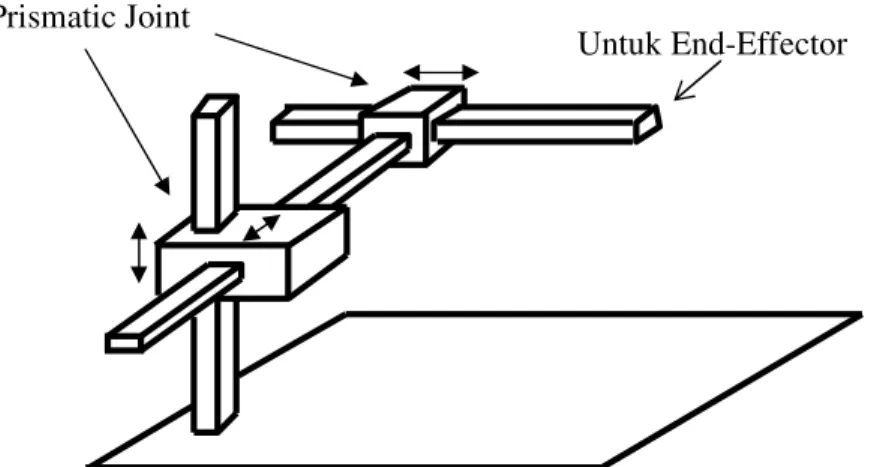
Gambar 3. Manipulator Tipe Cartesian-Coordinate ... 6
Gambar 4. Manipulator Tipe Cylindrical-Coordinate ... 7
Gambar 5. Manipulator Tipe Polar-Coordinate ... 7
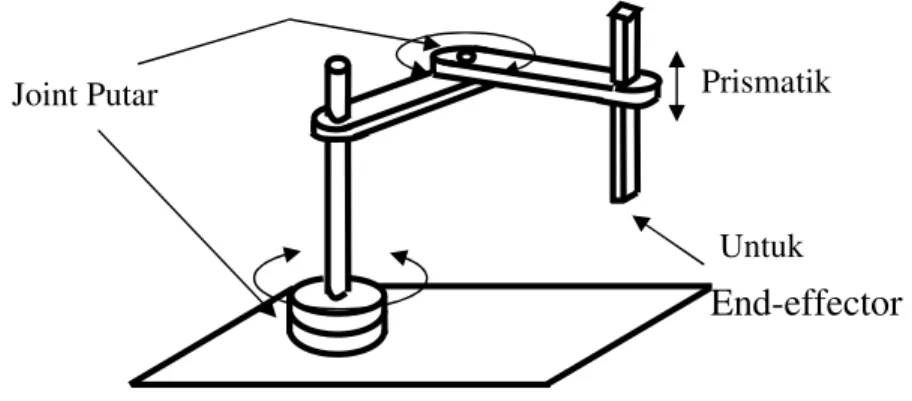
Gambar 6. Manipulator Tipe Scara ... 8
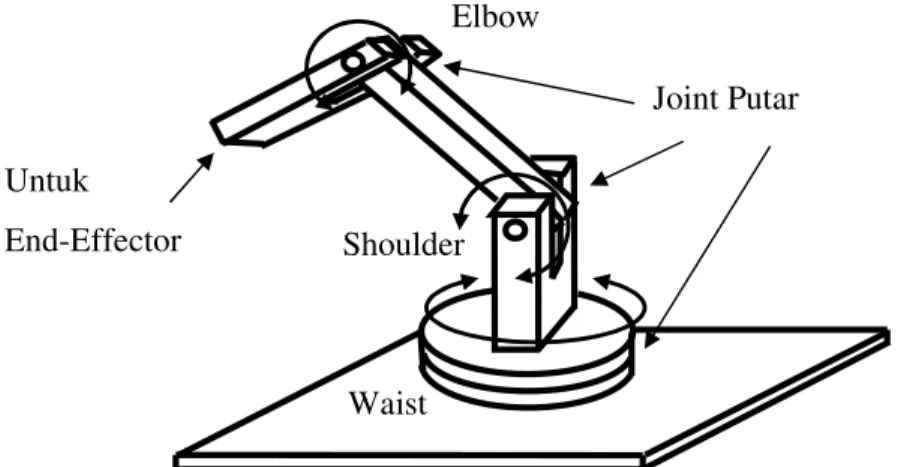
Gambar 7. Manipulator Tipe Articulated/Anthropomorphic ... 9
Gambar 8. Perhitungan koordinat manipulator tipe cylindrical-coordinate ... 17
Gambar 9. Mekanisme penyusun joint manipulator ... 19
Gambar 10. Manipulator robot pemanen yang telah dibuat ... 36
Gambar 11. Roda caster yang dipasang pada plat besi ... 37
Gambar 12. Joint sudut beserta bagian-bagiannya ... 38
Gambar 13. Link vertikal beserta bagian-bagiannya. ... 39
Gambar 14. Joint vertikal beserta bagian-bagiannya... 40
Gambar 15. Link horizontal beserta bagian-bagiannya ... 41
Gambar 16. Joint horizontal beserta bagian-bagiannya ... 42
Gambar 17. Sistem pemanenan dari arah depan ... 43
Gambar 18. Sistem pemanenan dari arah menyamping... 43
Gambar 19. Grafik hubungan antara nilai pulsa masukan ke motor stepper dengan putaran sudut joint 1 ... 44
Gambar 20. Grafik hubungan antara nilai hasil konversi bilangan heksadesimal dengan jarak jangkauan joint 2 ... 45
Gambar 21. Grafik hubungan antara nilai hasil konversi bilangan heksadesimal dengan jarak jangkauan joint 3 ... 45
Gambar 22. Perbandingan jarak input dengan jarak aktual joint 1 ... 46
Gambar 23. Perbandingan jarak input dengan jarak aktual joint 2 ... 47
Gambar 24. Perbandingan jarak input dengan jarak aktual joint 3 ... 48
v Gambar 27. Perbandingan nilai input dengan nilai aktual koordinat Z ... 53 Gambar 28. Grafik perbandingan antara titik pergerakan manipulator dengan simpangan pada koordinat X ... 57 Gambar 29. Grafik perbandingan antara titik pergerakan manipulator dengan
simpangan pada koordinat Y ... 58 Gambar 30. Grafik perbandingan antara titik pergerakan manipulator dengan
simpangan pada koordinat Z ... 59 Gambar 31. Grafik perbandingan pengukuran point to point antara pemakaian
DAFTAR TABEL
Halaman Tabel 1. Spesifikasi motor stepper... 25 Tabel 2. Faktor-faktor koreksi daya yang akan ditransmisikan, fc... 30
vii DAFTAR LAMPIRAN
Halaman
Lampiran 1. Tahapan penelitian ... 66
Lampiran 2. Diagram alir program pengendalian manipulator robot pemanen . 67 Lampiran 3. Program pengendalian manipulator ... 68
Lampiran 4. Gambar rangkaian pengendali motor stepper ... 75
Lampiran 5. Gambar rangkaian pengendali motor DC vertikal ... 76
Lampiran 6. Gambar rangkaian pengendali motor DC horisontal ... 77
Lampiran 7. Gambar rangkaian pengendali semua motor ... 78
Lampiran 8. Gambar Relay driver DC servo motor translasi vertikal ... 80
Lampiran 9. Gambar rangkaian relay pengendali servo DC translasi horizontal 81 Lampiran 10. Gambar rangkaian interface digital input output jenis PPI8255 .. 82
Lampiran 11. Gambar rangkaian penguat encoder motor DC horizontal…... 83
Lampiran 12. Gambar konstruksi manipulator ... 84
Lampiran 12. Gambar konstruksi manipulator (lanjutan) ... 85
Lampiran 12. Gambar konstruksi manipulator (lanjutan) ... 86
Lampiran 13. Data pengujian pada joint 1 ... 87
Lampiran 14. Data pengujian pada joint 2 ... 88
Lampiran 15. Data pengujian pada joint 3 ... 89
Lampiran 16. Data hasil pengujian manipulator dengan end-effector ... 90
Lampiran 16. Data hasil pengujian manipulator dengan end-effector(lanjutan) 91 Lampiran 17. Data hasil pengujian manipulator tanpa end-effector ... 92
Lampiran 17. Data hasil pengujian manipulator tanpa end-effector(lanjutan) .. 93
Lampiran 18. Data hasil pengujian manipulator dengan beban 200 gr ... 94
Lampiran 18. Data hasil pengujian manipulator dengan beban 200 gr (lanjutan) ... 95
Lampiran 19. Data hasil pengujian manipulator dengan beban 1200 gr ... 96
Lampiran 19. Data hasil pengujian manipulator dengan beban 1200 gr (lanjutan) ... 97
Lampiran 20. Data pengujian point to point dengan end-effector ... 98
Lampiran 21. Data pengujian point to point dengan beban 1200 gr ... 100 Lampiran 21. Data pengujian point to point dengan beban 1200 gr (lanjutan) .. 101 Lampiran 22. Gambar perbandingan manipulator sebelum dan sesudah dimodifikasi ... 102
1 I. PENDAHULUAN
A. LATAR BELAKANG
Perkembangan teknologi di bidang elektronika dan penginderaan (machine vision) yang semakin pesat memicu perkembangan di bidang pengendalian (otomatisasi) yang memiliki nalar tinggi yang dikenal sebagai robot.
Dewasa ini pemakaian robot secara komersial terjadi di bidang industri manufacture khususnya di negara maju seperti Jepang dan Amerika Serikat. Pemakaian yang paling mencolok adalah di bidang perakitan mobil dan peralatan elektronik seperti komputer, radio, televisi, dan lain-lain.
Tingginya minat angkatan kerja muda untuk bekerja di bidang industri non pertanian, ditambah kesan jorok dan kotor lingkungan kerja pertanian menjadi ancaman akan berkurangnya ketersediaan tenaga kerja di bidang pertanian di masa yang akan datang. Permintaan pasar pun pada produk pertanian yang memiliki tingkat higienis maupun kebersihan yang tinggi, membuat para petani lebih memikirkan cara penanganan produk pertanian yang lebih bersih dan higienis seperti di dalam greenhouse yang bebas dari campur tangan biologis seperti manusia.
Adanya kecenderungan tersebut menjadi tantangan bagi tenaga ahli di bidang teknik pertanian untuk menyediakan tenaga mekanis yang mampu menggantikan peran manusia dalam melakukan pekerjaan di bidang pertanian. Namun kompleksnya pekerjaan di bidang pertanian menyebabkan tidak semua pekerjaan bisa dilakukan dengan mesin konvensional. Untuk pekerjaan yang memerlukan tingkat selektifitas yang tinggi, dibutuhkan mesin yang lebih canggih yang mampu membedakan target dan non target. Mesin yang bisa melakukan tugas seperti itu adalah robot pertanian atau robot bioproduksi.
Beberapa alasan yang dapat mendukung pentingnya robot bioproduksi yaitu : (1) Meskipun banyak pekerjaan di bidang pertanian yang telah dimekanisasi, masih terjadi banyak kecelakaan, masih banyak pekerjaan monoton yang tidak cocok untuk dikerjakan oleh manusia; (2) Tenaga kerja pertanian yang cenderung semakin berkurang karena jika dibandingkan
dengan industri lain, pertanian kurang mendatangkan minat sebagai usaha yang berprospek cerah; (3) Permintaan pasar untuk kualitas produk merupakan faktor penting dalam bioproduksi. Evaluasi produk yang dilakukan melalui pengamatan manusia tidak dapat dipercaya terutama dalam hal stabilitas dan keseragaman, walaupun kemampuan manusia dalam memberi persepsi dan alasan belum sepenuhnya dapat diterapkan pada robot.
Berikut ini adalah beberapa proyek pengembangan robot-robot pertanian yang sedang dan terus dikembangkan di universitas di Jepang, bekerjasama dengan pusat penelitian milik pemerintah dan perusahaan-perusahaan produksi alat-alat pertanian. Beberapa diantaranya adalah sebagai berikut:
Robot pemangkas dan pemetik buah anggur Robot pemetik mentimun
Robot pembersih lapangan rumput Robot pemetik buah strawberry Robot pemetik tomat besar Robot pemetik tomat mini Robot penanam bunga potong
Untuk mengantisipasi pesatnya perkembangan robotika internasional, maka di Indonesia juga perlu adanya pengembangan di bidang robotika khususnya robot bioproduksi. Dengan adanya pembuatan manipulator koordinat silinder untuk robot AERO I ini diharapkan mampu mengembangkan pengetahuan di bidang robotika khususnya robot bioproduksi di Indonesia.
Untuk pengembangan selanjutnya, robot AERO I perlu adanya modifikasi agar sistem kerjanya menjadi lebih baik. Robot AERO I perlu untuk dimodifikasi karena pergerakan joint masih bergerak secara sendiri-sendiri dan bertahap. Selain itu juga, pergerakan pada joint horisontal masih lambat serta positioning accuracy-nya masih terlalu besar. Oleh karena itu, dikembangkan robot AERO II yang diharapkan dapat mengatasi masalah tersebut.
3 B. TUJUAN PENELITIAN
Tujuan umum dari penelitian ini adalah memodifikasi manipulator robot pemanen komoditas pertanian dalam greenhouse yang telah dikembangkan sebelumnya, yaitu manipulator tipe cylindrical-coordinate. Sedangkan tujuan khusus dari penelitian ini, yaitu memodifikasi dan menguji kemampuan manipulator robot pemanen komoditas pertanian dalam greenhouse untuk menjangkau target dalam koordinat ruang.
II. TINJAUAN PUSTAKA A. ROBOT BIO-PRODUKSI
Secara garis besar, robot bio-produksi memiliki struktur dasar antara lain: manipulator, end-effector, vision sensor, traveling device, control device, dan actuator (Rochim, 2004).
Definisi robot bio-produksi, bagaimanapun, belumlah jelas di kalangan profesional yang berhubungan dengan bidang ini. Dengan demikian pengertian mengenai apa yang dimaksud dengan robot bio-produksi masih menjadi subjek diskusi (Kondo dan Ting, 1998).
Robot bio-produksi dirancang untuk menangani: tanaman, binatang, makanan dan objek biologi lainnya. Oleh karena itu, perlu pengetahuan mengenai karakteristik objek biologi. Aspek sosial seperti ekonomi, manajemen, pemasaran, dan tingkat penerimaan masyarakat terhadap teknologi ini juga perlu dipertimbangkan. Beberapa contoh robot bio-produksi dapat dilihat pada Gambar 1.
Gambar 1. Robot pemanen apel
B. MANIPULATOR
Berdasarkan Japanese Industrial Standard (JIS B0134-1986, Terms for Industrial Robots), manipulator adalah peralatan yang mempunyai fungsi sama dengan lengan manusia dan dapat memindahkan benda dalam ruang tiga dimensi.
5 Banyak yang mengira bahwa manipulator sama seperti lengan manusia, karena mempunyai fungsi hampir sama dengan lengan manusia. Tetapi pada kenyataan mekanismenya tidak sama dengan lengan manusia, misalnya saja jenis mekanisme dari manipulator terdiri dari berbagai tipe, seperti: cartersian coordinate, cylindrical cooordinate, scara, dan lain sebagainya, sehingga manipulator tidak selalu dapat disebut dengan lengan.
Manipulator tersusun dari joint dan link. Mobilitas dari manipulator dijamin dengan adanya joint (sambungan) antara dua lengan (link). Joint yang membentuk manipulator dibedakan secara umum menjadi dua, yaitu “rotational joint” dan “prismatic joint”. Rotational joint menyediakan gerakan berputar, sedangkan prismatic joint untuk menyediakan gerakan translasi. Simbol untuk joint terlihat pada Gambar 2.
Gambar 2. Simbol Joint (JIS)
Menurut (Okamoto et al., 1992) banyaknya sambungan (joint) dan mata rantai (link) disebut derajat bebas (degree of freedom/ DOF). Supaya dapat bergerak dalam ruang tiga dimensi, manipulator membutuhkan minimal tiga derajat bebas. Semakin besar jumlah derajat bebas, akan semakin kompleks konstruksi robot dan semakin sulit untuk mengontrol sistem. Mekanisme dasar manipulator dapat diubah sesuai dengan derajat bebas, tipe joint, panjang link, dan panjang offset.
Struktur dasar manipulator sangat berbeda dari mesin konvensional karena manipulator memiliki banyak link dengan dua ujung dimana ujung
yang satu bebas dan ujung yang lain tetap. Manipulator tersusun atas link dan joint. Mobilitas dari manipulator dijamin dengan adanya joint (sambungan) antara dua titik. Pada suatu rantai kinematik terbuka, tiap sambungan prismatik atau sambungan putar menyediakan derajat mobilitas tunggal. Derajat mobilitas manipulator tersalur sepanjang struktur mekanisnya untuk menyediakan derajat bebas yang diperlukan dalam melakukan pekerjaan.
Umumnya manipulator memerlukan 6 DOF agar dapat menggerakkan end-effector ke posisi dan postur yang tepat dalam ruang 3D. Tetapi jumlah DOF bisa berapa saja sesuai keperluan. Semakin banyak DOF akan makin fleksibel, tetapi mekanisme dan cara mengontrolnya akan makin kompleks dan makin berat.
Manipulator robot bio-produksi dalam operasinya harus mampu menghindari benturan dengan penghalang dan mencapai sasaran dengan baik meskipun lokasi sasaran cukup kompleks.
Jenis-jenis manipulator antara lain:
1. Manipulator Tipe Cartesian-Coordinate/ Rectangular-Coordinate
Manipulator tipe cartesian-coordinate mempunyai 3 prismatic joint yang berperan dalam menetapkan posisi dalam ruang. mekanisme dan kontrol dari manipulator ini mudah, tetapi kurang fleksibel. Manipulator jenis ini mempunyai nilai keakuratan yang lebih tinggi dibandingkan dangan manipulator jenis lain. Positioning accuracy adalah tetap diseluruh lokasi workspace. Manipulator jenis ini banyak digunakan untuk material handling dan assembly. Bentuk dari manipulator tipe cartesian-coordinate dapat dilihat pada Gambar 3.
7 Gambar 3. Manipulator Tipe Cartesian-Coordinate
2. Manipulator Tipe Cylindrical-Coordinate
Manipulator tipe cylindrical-coordinate mempunyai 2 prismatic joint dan 1 rotational joint yang kurang berperan dalam menentukan posisi dalam ruang. Manipulator jenis ini lebih fleksibel dibanding jenis yang pertama. Positioning accuracy menurun dengan bertambahnya stroke horizontal. Bentuk dari manipulator tipe cylindrical-coordinate dapat dilihat pada Gambar 4.
Gambar 4. Manipulator Tipe Cylindrical-Coordinate
3. Manipulator Tipe Polar-Coordinate/ Spherical-Coordinate
Manipulator tipe spherical-coordinate mempunyai 1 prismatic joint dan 2 rotational joint yang berperan dalam menentikan posisi dalam ruang. Manipulator jenis ini lebih fleksibel dari dua tipe sebelumnya. Positioning accuracy menurun dengan bertambahnya stroke radial. spherical-coordinate manipulator umum digunakan untuk machining.
Untuk End-Effector Joint putar Prismatik Joint Untuk End-Effector Prismatic Joint
Bentuk dari manipulator tipe spherical-coordinate dapat dilihat pada Gambar 5.
Gambar 5. Manipulator Tipe Polar-Coordinate 4. Manipulator Tipe Scara
Manipulator tipe scara memiliki kekuatan relatif tinggi untuk pembebanan vertikal dan lentur untuk pembebanan horizontal. Umum digunakan untuk menangani benda kecil. (SCARA = Selective Compliance Assembly Robot Arm). Bentuk dari manipulator tipe scara dapat dilihat pada Gambar 6.
Gambar 6. Manipulator Tipe Scara
5. Manipulator Tipe Articulated/Anthropomorphic
Manipulator tipe articulated/anthropomorphic mempunyai 3 joint yang berperan dalam menentukan posisi dalam ruang. Joint-joint tersebut adalah tipe rotational joint. Ditambah dengan joint lainnya untuk mengatur lengan dan end-effector. Manipulator jenis ini mempunyai
joint-Untuk
End-effector
Joint Putar Prismatik
Joint putar End-effector
Untuk
9 tangan. Manipulator ini paling fleksibel dan cepat tetapi mekanisme dan cara kontrol makin sulit serta akurasi posisi lebih rendah dibanding jenis-jenis manipulator sebelumnya. Bentuk umum dari manipulator dengan tipe articulated/anthropomorphic dapat dilihat pada Gambar 7.
Gambar 7. Manipulator Tipe Articulated/Anthropomorphic
C. ROBOT BIO-PRODUKSI ( Penelitian Sebelumnya)
Berdasarkan penelitian sebelumnya, Basuki (2007) menyimpulkan bahwa hasil pengujian manipulator didapatkan simpangan rata-rata untuk koordinat X 3.19 mm dan ketepatan rata-rata 87.86 %, koordinat Y simpangan rata-rata 1.32 mm dan ketepatan rata-rata 95.15 %, koordinat Z simpangan rata-rata 0.3 mm dan ketepatan rata-rata 99.88 %. Simpangan pada jarak antara titik acuan dengan titik koordinat tujuan didapatkan simpangan rata-rata sebesar 0.44 dan ketepatan rata-rata 99.72 %.
Dari data di atas, diharapkan untuk penelitian ini diperoleh simpangan rata-rata yang lebih kecil atau ketepatan yang lebih besar.
D. GREENHOUSE
Greenhouse berasal dari kata “green” yang berarti hijau dan “house” yang berarti rumah. Oleh karena itu greenhouse bisa diterjemahkan sebagai rumah hijau, karena tanaman yang ditanam didalamnya selalu tampak hijau sepanjang tahun (Widyastuti, 1993).
Untuk End-Effector Joint Putar Elbow Shoulder Waist
Menurut Nelson (1981) greenhouse didefinisikan sebagai suatu bangunan yang memiliki struktur atap dan dinding yang bersifat tembus cahaya, sehingga tanaman tetap memperoleh cahaya matahari dan terhindar dari kondisi lingkungan yang tidak menguntungkan.
Greenhouse berfungsi melindungi tanaman dari kondisi yang kurang menguntungkan, sehingga tanaman yang tumbuh di dalam greenhouse dapat tumbuh dengan baik dibandingkan dengan tanaman yang tumbuh di lahan terbuka. Lingkungan di dalam greenhouse merupakan areal tertutup sehingga kondisi di dalamnya dapat dikendalikan sesuai dengan kondisi lingkungan yang optimum bagi tanaman. Greenhouse dapat melindungi tanaman dari hujan, angin kencang dan juga serangan hama. Kondisi-kondisi lingkungan yang mempengaruhi pertumbuhan bagi tanaman seperti temperatur, kelembapan udara, intensitas cahaya matahari, dan kecepatan angin juga dapat diatur sedemikian rupa, sehingga menguntungkan bagi pertumbuhan tanaman.
Ada banyak tanaman yang sekarang diusahakan untuk ditanam di dalam greenhouse. Tanaman tersebut kebanyakan adalah tanaman yang sebelumnya ditanam di areal perkebunan. Contoh dari tanaman tersebut adalah paprika. Paprika ini cocok sekali ditanam di dalam greenhouse. Paprika merupakan salah satu tanaman yang buahnya menggantung dan penanamannya membutuhkan jarak tanam tertentu. Sebagai acuan, pada penanaman paprika di dalam greenhouse standar antar bedengan ± 140 cm dan antar tanaman ± 50 cm.
11 III. METODOLOGI PENELITIAN
A. WAKTU DAN TEMPAT
Penelitian dilaksanakan mulai Juni 2007 s/d Desember 2007. Modifikasi, kalibrasi serta pengujian dilakukan di Bagian Ergonomika dan Elektronika, lab. kontrol otomatik (di lab. lapangan Leuwikopo), Departemen Teknik Pertanian, Institut Pertanian Bogor.
B. ALAT DAN BAHAN 1. Alat Penelitian
a. Alat ukur yang digunakan untuk pengukuran koordinat ruang terdiri dari penggaris, meteran dan busur derajat.
b. Alat untuk pembuatan prototipe antara lain gerinda potong, las listrik, gerinda tangan, bor listrik, mesin bubut, gergaji, taps, skrap, obeng, tang, kunci pas dan kunci ring.
c. Alat untuk pembuatan rangkaian elektronik antara lain solder, solder sucker, tang potong, multitester digital dan osiloskop.
d. Peralatan untuk pembuatan program yaitu seperangkat komputer (PC) PentiumTM, 100MHz dengan slot ISA.
2. Bahan Penelitian
a. Bahan untuk konstruksi manipulator antara lain:
• Caster (roda bebas) ukuran tinggi 34 mm dan dimeter roda 25 mm.
• Slider, rack-pinion, poros berulir, dan worm-gear.
• Gear box dengan perbandingan 1:10.
• Plat besi ukuran 400 x 400 mm dan tebal 20 mm.
• Selang besar (ukuran 15 mm ) dan kecil (ukuran 5 mm)
(NB : bahan yang ditambahkan. Fungsinya untuk merapikan kabel)
• Plat Alumunium tebal 12 mm.
• Besi silinder pejal diameter 30 mm.
• Besi siku ukuran 92 x 92 mm dan 60 x 60 dengan tebal 5 mm
• Motor Stepper merk Vexta model ASM66AC-T3.6 produksi Oriental Motor, tegangan 2.69 volt dan arus 1.7 ampere.
• 2 buah Motor DC daya 60 Watt, tegangan 65 volt, arus 1.3 ampere (NB : motor sebelumnya menggunakan sebuah motor AC dan motor DC. Dan sekarang motor AC diganti dengan motor DC.) b. Bahan untuk pembuatan rangkaian elektronik antara lain PCB, resistor,
kapasitor, dioda, trimpot, LED, transistor, mosfet, trafo, relay, limit switch, IC (Intregated Circuit), PPI 8255, dan kabel
c. Bahan untuk pembebanan pada joint 3 dengan massa 200 gr, 1200 gr dan end-effector (+ 600 gr ).
C. TAHAPAN PENELITIAN
Metode yang digunakan dalam penelitian ini adalah metode pendekatan rancangan secara umum yaitu berdasarkan pendekatan rancangan fungsional dan pendekatan rancangan struktural. Tahapan dari penelitian yang dilaksanakan dapat dilihat pada Lampiran 1.
D. METODE MODIFIKASI 1. Modifikasi program
Pada pemrograman sebelumnya, program yang dibuat hanya mengeksekusi masing-masing joint. Maksudnya joint akan bergerak secara bertahap, yaitu dari joint putar lalu joint vertikal dan eksekusi yang terakhir adalah joint horisontal. Dengan demikian, dapat dikatakan dalam menjangkau target, robot AERO I masih terlalu lambat.
Pada pemrograman selanjutnya, program yang dibuat akan mengeksekusi joint secara bersama-sama. Maksudnya, joint akan menjangkau target secara bersamaan. Untuk modifikasi ini, program yang digunakan masih sama, yaitu bahasa-C. Namun, dalam pemrogramannya ada bagian yang harus diubah.
Bagian yang paling banyak diubah adalah pada bagian pengeksekusian motor. Pada pemrograman sebelumnya, eksekusi motor dibuat pada
sub-13 dibuat pada sub-main yang sama sehingga diharapkan motor akan bergerak bersama-sama. Untuk sub-main yang lain, masih sama dengan sub-main pada pemrograman sebelumnya.
2. Modifikasi motor
Pada robot AERO I, motor yang digunakan pada joint horisontal adalah motor AC. Motor ini bergerak atau berputar secara bertahap dan cenderung lambat. Sehingga dapat dikatakan penjangkauan target pada joint horisontal sangat lambat.
Pada robot AERO II, motor yang digunakan pada joint horisontal adalah motor DC. Motor ini bergerak atau berputar secara continue dan cepat sehingga dengan motor ini diharapkan pergerakan dari joint horisontal menjadi lebih cepat dalam menjangkau target.
Motor AC yang sebelumnya digunakan, langsung dicopot dan diganti dengan motor DC. Penempatan dari motor DC masih sama dengan penempatan dari motor AC.
3. Modifikasi rangkaian elektronika
Pada robot AERO I, rangkaian yang digunakan dapat dikatakan cukup rumit dan complicated. Rangkaian yang dibuat antara lain power supply, rangkaian pengendali motor stepper, rangkaian pengendali motor AC, rangkaian pengendali motor DC, rangkaian penghitung pulsa encoder, rangkaian pembaca pulsa penghitung encoder,dan rangkaian pengendali lama putaran motor DC. IC yang digunakan adalah IC 555, gerbang NAND IC 74LS10, IC 4070, IC 74LS138, IC 74LS245, IC 74LS373 dan, IC 74LS688.
Pada robot AERO II, rangkaian yang digunakan lebih sederhana dibandingkan dengan robot AERO I. Rangkaian yang dibuat antara lain power supply, rangkaian pengendali motor stepper, rangkaian pengendali motor DC vertikal, rangkaian pengendali motor DC horisontal, Rangkaian penguat encoder motor DC horizontal. IC yang digunakan adalah IC 555, IC 4023, dan IC 4049.
Penggantian rangkaian sebenarnya adalah imbas dari penggantian motor. Dengan demikian, dapat dikatakan rangkaian yang digunakan harus sesuai dengan motor yang digunakan. Rangkaian yang digunakan sebelumnya diubah total kecuali power supply yang masih dapat digunakan dengan penambahan output tegangan yaitu 24 V, 40 V dan 64 V.
E. METODE PENGUJIAN
Pengujian yang dilakukan pada manipulator robot yaitu antara lain: 1. Kalibrasi
Kalibrasi dilakukan untuk mendapatkan hubungan antara jarak atau sudut jangkauan yang diinginkan dengan nilai masukan untuk pergerakan dari joint, yang dihasilkan oleh putaran dari motor listrik. Kalibrasi ini dilakukan berulang-ulang dengan memasukkan nilai heksadesimal yang berbeda-beda dimulai dari yang terkecil hingga terbesar sampai pergerakan joint mencapai jangkauan maksimum. Data-data kalibrasi tersebut kemudian dicari persamaan linearnya sehingga persamaan tersebut dapat dimasukkan kedalam program pengendalian manipulator.
Karena manipulator yang dibuat menggunakan 2 jenis motor yang berbeda yaitu motor servo dan motor stepper, maka teknik pengkalibrasian antara dua jenis motor tersebut berbeda.
Kalibrasi pada motor stepper dilakukan untuk mendapatkan hubungan antara sudut jangkauan yang diinginkan dengan pulsa masukan ke motor stepper. Kalibrasi pada motor stepper dilakukan dengan terlebuh dahulu joint 1 digerakkan ke posisi limit switch (titik acuan). Kemudian nilai pulsa keluaran dimasukkan ke dalam program pengendalian pergerakan motor stepper. Setelah itu, program tersebut dijalankan dan motor berputar sehingga joint 1 berputar menuju sudut jangkauan tertentu. Setelah itu, sudut jangkauan perputaran dari joint 1 diukur dengan menggunakan busur derajat.
15 encoder. Kalibrasi pada motor servo dilakukan dengan terlebih dahulu menggerakkan joint 2 atau 3 ke posisi limit switch (titik acuan). Kemudian nilai pulsa dimasukkan ke dalam program pengendalian motor servo. Setelah itu, program tersebut dijalankan dan motor berputar sehingga joint 2 atau 3 bergerak. Nilai pulsa tersebut akan dibandingkan dengan nilai pembacaan pulsa encoder, jika sama maka pergerakan joint akan terhenti. Setelah itu, jarak jangkauan dari joint 2 dan joint 3 diukur dengan menggunakan penggaris atau meteran.
2. Pengujian pada masing-masing joint
Pengujian dilakukan dengan menghitung simpangan dan ketepatan antara nilai masukan dengan nilai aktual. Simpangan dihitung dengan mengikuti persamaan berikut ini.
i o n y y y = − ...(1) dimana: yn = simpangan ke-n (mm) yi = jarak seharusnya (mm) y0 = jarak aktual (mm)
Ketepatan dihitung dengan mengikuti persamaan berikut ini. Ketepatan = 1− − ×100% H X H ... ...(2) dimana: H = jarak seharusnya (mm) X = jarak aktual (mm)
Pengujian pada masing-masing joint dilakukan untuk mendapatkan simpangan (error) dan ketepatan jarak atau sudut target jangkauan pada masing-masing joint. Dengan adanya pengujian ini, dapat diketahui ketepatan jangkauan dari masing-masing joint dan juga dapat diketahui joint yang menyumbangkan simpangan (error) terbesar pada pergerakan manipulator.
Pengujian dilakukan dengan cara memasukkan nilai jarak atau sudut yang harus dicapai oleh joint. Kemudian dengan menggunakan alat ukur
(penggaris atau busur derajat) jarak atau sudut jangkauan diukur (jangkauan aktual). Pada masing-masing pengujian dilakukan tiga kali pengulangan.
3. Pengujian manipulator
Pengujian dilakukan dengan terlebih dahulu membuat program pengendalian pergerakan manipulator menuju titik sasaran dalam koordinat tiga dimensi. Program pengendalian ini dibuat berbeda dengan penelitian sebelumnya. Perbedaannya terdapat pada pengeksekusian joint. Jika pada penelitian sebelumnya joint dijalankan secara bertahap dari joint 1 (stepper), joint 2 (vertikal) lalu joint 3 (horisontal), pada program pengendalian yang baru joint dijalankan secara bersamaan sehingga memungkinkan terjadinya error. Namun, dengan pengeksekusian secara bersamaan tersebut diharapkan pencapaian ke titik tujuan jadi lebih cepat. Diagram alir program pengendalian pergerakan manipulator menuju titik sasaran dapat dilihat pada Lampiran 2.
Dalam pengukuran ini diberi dua perlakuan yaitu dengan pembebanan dan tanpa pembebanan. Hal ini dilakukan untuk mendapatkan hasil perbandingan antara kedua perlakuan tersebut. Selain itu juga, untuk perlakuan dengan pembebanan diharapkan dapat diperoleh berat maksimum yang dapat diangkat oleh lengan manipulator. Pembebanan yang akan diberikan adalah 200 gr dan 1200 gr serta pembebanan dengan end effector yang memiliki massa + 600 gr.
Manipulator yang dibuat merupakan manipulator dengan tipe cylindrical-cordinate sehingga perhitungan posisi tiga dimensinya dapat dilihat pada Gambar 8. Pehitungan ini lalu dimasukkan ke dalam program pengendalian manipulator. Program pengendalian pergerakan manipulator ini dibuat dalam bahasa-C yang dapat dilihat pada Lampiran 3.
17 Gambar 8. Perhitungan koordinat manipulator tipe cylindrical-coordinate
Pengujian manipulator dilakukan untuk mendapatkan simpangan (error) dan ketepatan jangkauan antara titik koordinat yang harus dituju (titik koordinat masukan) dengan pencapaian titik koordinat tujuan (titik koordinat aktual). Uji kinerja ini dilakukan melalui titik acuan, dalam artian setiap pergerakan manipulator dimulai dari titik acuan. Setiap manipulator sudah mencapai titik koordinat tujuan, maka manipulator tersebut harus kembali lagi ke titik acuan, sebelum bermanuver ke titik koordinat tujuan berikutnya.
Pengujian dilakukan dengan cara memasukkan nilai koordinat tiga dimensi X,Y, dan Z. Penentuan nilai koordinat ini dilakukan secara random. Setelah itu diukur pergerakan jangkauan masing-masing joint. Pengukuran tidak dilakukan melalui pengukuran koordinat X dan Y, kecuali koordinat Z. Hal ini dikarenakan pengukuan koordinat X dan Y sulit dilakukan karena mengukur koordinat ruang dan tidak mengukur pergerakan atau jangkauan dari joint sehingga kesalahan pengukuran dapat terjadi. Berbeda halnya dengan mengukur koordinat Z dimana pengukuran dilakukan pada pergerakan vertikal dari joint horizontal, sehingga kesalahan pada saat pengukuran sangat kecil.
Pengukuran dilakukan dengan mengukur pergerakan dari link horizontal (nilai r) dan pergerakan joint 1 atau joint sudut (besar sudut).
Pr X Y Z P XP YP ZP
θ
r θ = atan Xp Yp r = XP2 + YP2 Z = ZP 2 2 2 Pr = Xp +Yp +ZpKemudian dengan memasukkan nilai r dan besar sudut tersebut ke dalam rumus koordinat dua dimensi didapatkan nilai koordinat X dan Y jika dilakukan dengan perhitungan. Untuk memperoleh nilai aktual maka setelah diperoleh nilai r ditarik garis pada sumbu X dan pada sumbu Y dengan menggunakan penggaris atau meteran. Penentuan jarak X dan Y haruslah siku-siku dengan garis r. Lihat pada gambar 8.
4. Pengujian point to point
Pengujian ini dilakukan untuk mendapatkan simpangan (error) pada pergerakan manipulator dari titik koordinat yang satu ke titik koordinat berikutnya tanpa adanya koreksi ke titik acuan. Pengujian ini dimaksudkan untuk mengetahui seberapa besar simpangan dan ketepatan manipulator ketika harus bermanuver dari satu titik ke titik berikutnya tanpa harus kembali ke titik acuan. Hal ini menuntut programmer untuk membuat program yang dapat menyimpan dan mengingat titik-titik koordinat target dari manipulator, baik titik koordinat sebelum maupun titik koordinat yang akan dijangkau oleh manipulator.
Pengujian hanya dilakukan pada enam titik koordinat jangkauan pada satu kali pengujian dengan pertimbangan agar error yang diperoleh masih dalam toleransi yaitu kurang dari 2 mm. Penentuan titik koordinat target dipilih secara random. Pengujian dilakukan dengan cara pertama-tama manipulator di arahkan ke titik acuan. Kemudian nilai koordinat tiga dimensi X,Y, dan Z dimasukkan kedalam program. Setelah itu diukur pergerakan jangkauan masing-masing joint. Metode pengukuran sama seperti pada pengujian manipulator yaitu tidak dilakukan melalui pengukuran koordinat X dan Y, kecuali koordinat Z tetapi dengan mengukur link horizontal (nilai r) dan joint sudut (besar sudut). Lihat pada gambar 8.
Pada pengujian point to point hanya diberikan pembebanan dengan end-effector (+ 600 gr ) dan 1200 gr. Hal itu dilakukan untuk memperoleh hasil perbandingan antara berat end-effector dengan berat maksimum yang mungkin terjadi dengan massa 1200 gr tersebut.
IV. PENDEKATAN DISAIN A. KRITERIA DISAIN
Persyaratan yang harus dimiliki oleh manipulator adalah manipulator ini harus mampu menjangkau benda dalam ruang tiga dimensi sesuai dengan koordinat yang telah ditentukan. Manipulator yang dibuat merupakan manipulator tipe cylindrical coordinate. Pemilihan tipe manipulator ini didasarkan pada kemudahan dalam perancangan, kemudahan dalam pembuatan dan perakitan, jumlah joint sedikit (3 buah joint), kemudahan dalam perhitungan matematis untuk pencapaian titik koordinat target tujuan.
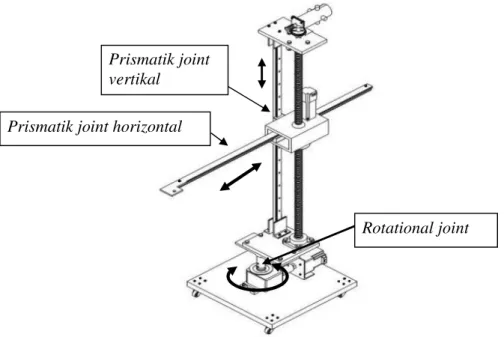
Manipulator yang dibuat terdiri dari 3 derajat bebas (3 DOF) atau 3 buah joint. Ketiga joint tersebut terdiri dari 2 prismatic joint dan 1 rotational joint. Rotational joint menggerakkan manipulator dalam arah putaran mendatar sehingga dapat disebut joint sudut. Prismatic joint yang pertama menyediakan gerak translasi pada manipulator dalam arah vertikal atau manipulator bekerja naik atau turun. Prismatic joint yang kedua menggerakkan manipulator menjangkau target dalam arah horizontal, dalam hal ini manipulator bekerja merentang atau memendek. Mekanisme joint yang menyusun manipulator tipe cylindrical coordinate disajikan pada Gambar 9.
Gambar 9. Mekanisme joint penyusun manipulator. Prismatik joint horizontal
Rotational joint Prismatik joint
B. RANCANGAN FUNGSIONAL
Manipulator yang dibuat berfungsi untuk menjangkau benda dalam ruang tiga dimensi sesuai dengan koordinat yang diinginkan. Karena merupakan robot pemanen maka benda disini merupakan buah yang masih terdapat di pohonnya, sehingga ujung manipulator ini nantinya akan dipasangi dengan end-effector untuk memanen buah tersebut.
Untuk mendukung fungsi tersebut maka diperlukan komponen-komponen lain yang saling berkaitan agar manipulator yang dibuat dapat bekerja sesuai dengan fungsinya. Komponen-komponen tersebut beserta fungsinya antara lain: 1. Dudukan Bawah
Dudukan bawah berfungsi sebagai tempat menopang seluruh bagian manipulator. Dudukan bawah terdiri dari komponen dengan fungsi masing-masing antara lain:
• Roda bebas (caster)
Roda bebas (caster) berfungsi untuk mempermudah dalam pemindahan manipulator (portable).
• Plat Besi
Plat besi berfungsi sebagai dudukan dari gearbox, sehingga boleh dikatakan plat besi ini menopang seluruh bagian manipulator. 2. Joint Sudut
Joint sudut berfungsi memutar manipulator pada sumbu putar atau titik poros pada bidang datar horizontal. Bidang datar horizontal mencakup koordinat x dan y juga koordinat –x dan y. Sehingga titik poros putaran manipulator merupakan titik acuan yaitu koordinat (0,0). Komponen yang menyusun joint sudut antara lain:
• Gearbox
Gearbox berfungsi untuk merubah arah putaran poros dari arah mendatar menjadi tegak lurus terhadap sumber putaran. Gearbox juga berfungsi sebagai sumbu putar atau titik poros dari manipulator. Gearbox juga mereduksi putaran yang dihasilkan oleh motor stepper dengan perbandingan 1 : 10.
21
• Motor stepper
Motor stepper berfungsi sebagai aktuator pada joint sudut yang memutar manipulator pada sumbu putar atau titik poros pada bidang datar horizontal.
• Dudukan motor stepper
Dudukan motor stepper berfungsi untuk menahan motor stepper sehingga dapat menyalurkan dayanya ke gearbox.
• Kopel
Kopel berfungsi menghubungkan poros motor stepper yang berdiameter 8 mm dengan poros gearbox yang berdiameter 10 mm.
• Plat poros besi
Plat poros besi berfungsi menggabungkan poros output dari gearbox dengan plat dudukan dari manipulator vertikal.
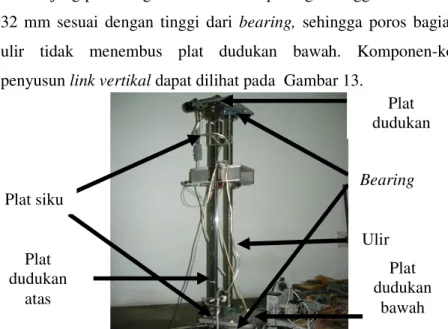
3. Link Vertikal
Link vertikal berfungsi sebagai dudukan dari link horizontal. Link vertikal menopang manipulator horizontal yang bekerja naik atau turun untuk menjangkau koordinat dalam arah vertikal (koordinat z). Komponen-komponen penyusun link vertikal antara lain:
• Plat dudukan
Plat dudukan terdapat dibagian atas maupun bagian bawah dari link vertikal. Plat dudukan ini berfungsi sebagai dudukan bearing (penopang ulir) dan plat siku (penopang slider vertikal).
• Plat siku
Plat siku berfungsi sebagai penumpu dari slider vertikal.
• Bantalan (bearing)
Bantalan adalah elemen mesin yang menumpu poros berbeban, sehingga putaran atau gerakan bolak-baliknya dapat berlangsung secara halus, aman, dan panjang umur (Sularso dan Suga, 1987). Bantalan pada rancangan ini berfungsi sebagai komponen yang menumpu poros ulir.
• Slider Vertikal
Slider vertikal berfungsi sebagai track (lintasan) bagi gerakan naik dan turunnya link horizontal.
• Ulir
Ulir berfungsi sebagai sistem transmisi pendorong turun atau naik bagi joint horizontal. Putaran dari ulir ini yang dapat menyebabkan joint horizontal dapat bergerak naik atau turun.
4. Joint Vertikal
Joint vertikal berfungsi memutar poros ulir, sehingga dudukan dari link horizontal dapat bergerak naik atau turun. Joint vertikal menggerakkan link horizontal naik atau turun untuk menjangkau koordinat dalam arah vertikal (koordinat z). Joint vertikal terdiri dari:
• Motor servo DC
Motor servo DC berfungsi sebagai actuator pada joint vertikal yang memutar poros berulir melalui worm-gear. Motor servo DC sudah dilengkapi encoder dan brake (rem). Encoder berfungsi untuk mengetahui sudut putar dari motor servo DC, sehingga pergerakan joint horizontal dalam arah vertikal dapat diketahui atau diukur. Rem berfungsi untuk menghentikan, mengatur dan mencegah putaran yang tidak dikehendaki pada putaran motor servo DC.
• Dudukan motor servo DC
Dudukan motor servo DC berfungsi untuk menahan motor servo sehingga dapat menyalurkan dayanya ke worm-gear.
• Worm-gear
Worm-gear berfungsi mereduksi putaran dari motor servo DC untuk disalurkan ke poros berulir.
5. Link Horizontal
Link horizontal berfungsi menjangkau koordinat dari sasaran r melalui gerakan translasi. Koordinat r merupakan titik pada koordinat x dan y. Titik ujung dari link horizontal merupakan tempat dudukan dari end-effector. Komponen yang menyusun link horizontal antara lain:
23
• Kotak segiempat
Kotak segiempat berfungsi sebagai penghubung antara link vertikal dengan link horizontal. Kotak segiempat juga berfungsi sebagai dudukan motor servo DC ( ditambah selenoid sebagai breaker) dan dudukan dari slider horizontal.
• Slider Horizontal
Slider horizontal berfungsi sebagai track (lintasan) bagi gerakan maju dan mundurnya rack.
6. Joint horizontal
Joint horizontal berfungsi menggerakkan rack dan slider horizontal maju atau mundur. Joint horizontal terdiri dari:
• Motor servo DC
Motor servo DC berfungsi sebagai actuator pada joint horizontal yang terhubung ke rack-pinion. Motor servo DC sudah dilengkapi dengan encoder tetapi belum dilengkapi dengan brake (rem). Encoder berfungsi untuk mengetahui sudut putar dari motor servo DC, sehingga pergerakan joint horizontal dalam arah horizontal dapat diketahui atau diukur. Rem berfungsi untuk menghentikan, mengatur dan mencegah putaran yang tidak dikehendaki pada putaran motor servo DC.
• Rack-pinion
Rack-pinion berfungsi merubah gerak rotasi (pinion dari putaran motor servo DC menjadi gerak translasi (rack)).
7. Sistem Kendali
• Power supply
Power supply berfungsi memberikan catu daya bagi rangkaian-rangkaian elektronika penunjang dan motor-motor penggerak pada manipulator.
• Rangkaian pengendali motor stepper
Rangkaian pengendali motor stepper berfungsi mengendalikan motor stepper melalui amplifier dari motor stepper dalam hal pemberian sinyal pulsa dan arah putaran motor. Rangkaian ini dilengkapi limit switch untuk keamanan dan titik acuan.
• Rangkaian pengendali motor servo DC ( Horizontal )
Rangkaian pengendali motor servo DC berfungsi mengendalikan motor servo DC melalui amplifier dari motor servo DC dalam hal pemberian sinyal pulsa dan arah putaran motor. Rangkaian ini tidak mengendalikan secara langsung brake untuk keamanan dan limit switch sebagai titik acuan.
• Rangkaian pengendali motor servo DC ( Vertikal )
Rangkaian pengendali motor servo DC berfungsi mengendalikan motor servo DC dalam hal penyalaan, arah putaran, brake atau rem, dan limit switch untuk keamanan dan sebagai titik acuan.
• Rangkaian pembaca dan penghitung pulsa encoder
Rangkaian pembaca dan penghitung pulsa encoder berfungsi membaca pulsa yang sudah dihitung oleh rangkaian penghitung pulsa encoder dan menghitung atau mencacah pulsa keluaran dari encode. 8. Sistem Interface
Interface berfungsi sebagai penghubung antara komputer (controller) dengan rangkaian luar seperti rangkaian pengendali motor dan rangkaian pembaca pulsa encoder.
9. Kontroller
Kontroller berfungsi sebagai pengendali seluruh kinerja dari manipulator.
C. RANCANGAN STRUKTURAL
Rancangan struktural dari masing-masing komponen pembentuk manipulator antara lain:
1. Dudukan bawah
Struktur komponen penyusun dudukan bawah antara lain:
• Roda bebas (caster)
Roda bebas yang digunakan memiliki tinggi sekitar 34 mm dengan diameter roda 25 mm.
25
• Plat besi
Plat besi yang digunakan mempunyai ukuran 400 x 400 mm dengan ketebalan 20 mm. Plat besi ini memiliki berat sekitar 18 kg.
2. Joint sudut
Struktur komponen penyusun joint sudut antara lain:
• Gearbox
Gearbox yang digunakan merupakan sistem transmisi worm-gear yang mereduksi putaran dengan perbandingan 1:10. Putaran motor stepper berkurang 10 kali setelah melewati gear box, sebaliknya daya yang dihasilkan meningkat 10 kali dari daya yang dihasilkan oleh motor stepper.
• Motor stepper
Motor stepper yang digunakan adalah jenis motor stepper unipolar dengan merk Vexta model ASM66AC-T3.6 produksi Oriental Motor. Motor stepper ini dilengkapi dengan amplifier tipe ASD12B-C
Tabel 1. Spesifikasi motor stepper
Tegangan 2.69 Volt Arus 1.7 Ampere Torsi maksimum 1.25 Nm Batas kecepatan 0 - 500 rpm Rasio gir 3.6 : 1 Resolusi 0.10/pulsa
• Dudukan motor stepper
Dudukan motor stepper terbuat dari besi siku ukuran 92 x 92 mm dan tebal 5 mm yang dipotong, sehingga ukurannya menjadi 92 x 50 mm.
• Kopel
Kopel terbuat dari poros besi pejal yang mempunyai diameter 30 mm. Dengan lubang untuk poros dari motor stepper berukuran 8 mm dan lubang untuk poros masukan dari gear box berukuran 10 mm.
• Plat poros besi
Plat poros besi terbuat dari plat besi ukuran 220 x 90 mm dan poros besi dengan diameter 30 mm. Plat dengan poros ini disatukan dengan cara dilas.
3. Link Vertikal
Struktur komponen penyusun link vertikal sudut antara lain:
• Plat dudukan
Plat dudukan bawah terbuat dari plat alumunium dengan ukuran 180 x 180 mm dan tebal 15 mm. Plat dudukan atas terbuat dari plat alumunium dengan ukuran 210 x 125 mm dan tebal 13 mm.
• Plat siku
Plat siku terbuat dari besi siku ukuran 60 x 60 mm dan tebal 5 mm. Salah satu bagiannya dipotong, sehingga ukurannya menjadi 60 x 25 mm.
• Bantalan (bearing)
Bantalan yang digunakan berjumlah dua. Bantalan pertama digunakan untuk menumpu poros pada bagian bawah ulir dengan diameter dalamnya berukuran 20 mm. Bantalan kedua digunakan untuk menahan poros pada bagian atas ulir dengan diameter dalamnya berukuran 15 mm. Kedua bantajan ini berjenis plan bearing.
Berdasarkan gerakan bantalan terhadap poros, bantalan yang digunakan adalah bantalan gelinding (rolling bearing). Sedangkan berdasarkan arah beban terhadap poros merupakan jenis bantalan radial. Berdasarkan alurnya, bantalan ini masuk ke dalam jenis bantalan arus dalam baris tunggal.
• Slider Vertikal
Slider vertikal yang digunakan memiliki ukuran 960 x 20 x 19 mm. Slider vertikal dipasang secara vertikal yang di tahan atau ditumpu oleh plat siku pada bagian bawah dan atasnya.
27
• Ulir
Ulir yang digunakan merupakan ulir tenaga jenis ball screw. Ulir dipasang vertikal dan ditumpu oleh dua buah bearing. Panjang poros yang berulir yaitu 880 mm. Ulir yang digunakan adalah ulir tunggal karena jarak baginya sama dengan kisar. Kisar adalah jarak antara puncak-puncak yang berbeda satu putaran dari satu jalur pada ulir (Sularso dan Suga, 1987). Jarak baginya yaitu 10 mm. Diameter dalam ulir 20 mm dan diameter luar 25 mm dengan sudut ulir sebesar 900.
4. Joint Vertikal
Struktur komponen penyusun joint vertikal antara lain:
• Motor servo DC
Motor servo DC yang digunakan memiliki spesifikasi daya 60 Watt, tegangan 65 volt, arus 1,3 ampere dan putaran maksimum 3000 RPM. Encoder pada motor ini memiliki spesifikasi tegangan 5 volt dengan output keluaran pulsa A dan pulsa B. Keluaran pada pulsa A menghasilkan 200 pulsa per satu putaran, sama halnya dengan keluaran pada pulsa B juga menghasilkan 200 pulsa per satu putaran.
• Dudukan motor servo DC
Dudukan motor servo DC terbuat dari siku 60 x 60 mm dan tebal 5 mm. Salah satu bagiannya dipotong, sehingga ukurannya menjadi 60 x 35 mm.
• Roda gigi cacing (worm gear)
Roda gigi cacing terdiri atas sebuah roda gigi dan pasangannya berupa cacing. Spesifikasi dari roda gigi dan cacingnya yaitu roda gigi memiliki diameter dalam 45 mm dengan jumlah gigi 30 buah. Cacing memiliki diameter dalam 10 mm dan jarak bagi 5 mm.
5. Link Horizontal
Struktur komponen penyusun link horizontal antara lain:
• Kotak segiempat
Kotak segiempat terdiri dari 4 plat alumunium yang tersusun menjadi sebuah box. Boxplat memiliki ukuran 180 x 125 x 66 mm. Plat
alumunium yang digunakan mempunyai tebal 11 mm. Plat dikencangkan dengan menggunakan baut pengencang.
• Slider Horizontal
Slider yang digunakan memiliki ukuran 936 x 20 x 16 mm. 6. Joint Horizontal
Struktur komponen penyusun manipulator horizontal antara lain:
• Motor servo DC
Motor servo DC yang digunakan adalah motor DC merk National tipe TS 1982 N123 E6 dengan spesifikasi tegangan DC 60 V, arus 0.3 A, daya output 60 W, dan putaran maksimum 3000 rpm. Motor servo DC ini belum dilengkapi dengan brake (rem) maka harus dibuat rem buatan.
Motor telah di lengkapi encoder. Encoder pada motor ini memiliki spesifikasi tegangan 5 volt dengan output keluaran pulsa A dan pulsa B. Keluaran pada pulsa A menghasilkan 200 pulsa per satu putaran, sama halnya dengan keluaran pada pulsa B juga menghasilkan 200 pulsa per satu putaran.
• Rack-Pinion
Rack-pinion terdiri dari rack yaitu batang besi yang bergerigi dan pinion yaitu pasangan roda giginya. Rack berukuran panjang 100 cm, lebar 3 cm dan tebal 7 mm. Pinion mempunyai dimeter dalam 41 mm dan jumlah gigi sebanyak 19 buah. Tipe roda gigi yang digunakan adalah tipe roda gigi lurus dimana letak giginya berjajar pada dua bidang silinder.
7. Sistem Kendali
• Power supply
Power supply berfungsi memberikan catu daya bagi rangkaian-rangkaian elektronika penunjang dan motor-motor penggerak pada manipulator. Unit ini berupa transformator dan jembatan dioda yang berfungsi untuk merubah tegangan AC menjadi DC. Tegangan yang
29
• Rangkaian pengendali motor stepper
Rangkaian ini berupa IC 555, IC 4023, IC 4049, rangkaian switch transistor, dan limit switch untuk keamanan dan titik acuan. Gambar rangkaian dapat dilihat pada Lampiran 4.
• Rangkaian pengendali servo motor DC vertikal
Rangkaian ini terdiri dari IC 4023, IC 4049, rangkaian switch transistor, relay, dan limit switch. Unit ini terhubung dengan driver dari motor DC sebelum terhubung dengan motor DC. Gambar rangkaian dapat dilihat pada Lampiran 5.
• Rangkaian pengendali servo motor DC horizontal
Rangkaian ini terdiri dari IC 4023, IC 4049, rangkaian switch transistor, relay ON-OFF motor dan rem, relay untuk H-bridge motor, dan limit switch. Gambar rangkaian dapat dilihat pada Lampiran 6.
• Rangkaian penguat encoder motor DC horizontal
Rangkaian ini terdiri dari IC 555 dan resistor. Dari rangkaian ini CN kaki 6 dapat berupa sinyal segi empat yang dibangkitkan dari komputer sehingga kecepatan putar motor stepper bisa diatur. Gambar rangkaian dapat dilihat pada Lampiran 7.
8. Interface
Interface terhubung pada slot ISA komputer dengan alamat 0X 300. Unit ini terdiri dari PPI 8255, buffer IC 74LS245, IC 74LS688 dengan saklar untuk keperluan pengalamatan. Untuk lebih jelasnya, lihat Lampiran 10.
9. Kontroller
Sebagai unit kontroler digunakan komputer jenis Pentium I yang dilengkapi dengan slot ISA untuk pemasangan sistem interface. Komputer ini dilengkapi dengan program bahasa-C untuk pemrograman algoritma pengendalian dari manipulator.
D. ANALISIS TEKNIK
Analisis teknik diperlukan untuk mengetahui tingkat keamanan dari kekuatan bahan yang digunakan dalam perancangan. Analisis teknik juga diperlukan untuk mengetahui gaya-gaya yang bekerja pada rancangan alat, sehingga alat dapat melakukan fungsinya dengan baik.
1. Analisis keamanan plat poros besi dan diameter poros gearbox
Menurut Sularso dan K. Suga (1997), untuk menghitung besarnya diameter poros yang digunakan adalah dengan menentukan daya rencana Pd (kW) dengan rumus :
fcP
Pd
=
(kW) ... (3) dimana : P = Daya nominal out put dari motor penggerak (kW).fc = Faktor koreksi diambil dari tabel faktor koreksi daya (Tabel 2).
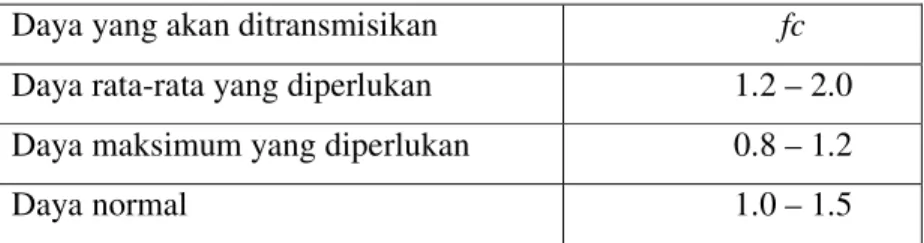
Tabel 2. Faktor-faktor koreksi daya yang akan ditransmisikan, fc
Daya yang akan ditransmisikan fc
Daya rata-rata yang diperlukan 1.2 – 2.0 Daya maksimum yang diperlukan 0.8 – 1.2
Daya normal 1.0 – 1.5
Untuk mengetahui momen puntir atau disebut juga momen rencana (T) dapat digunakan persamaan sebagai berikut:
102 ) 60 / 2 )( 1000 / (T n1 Pd = π ... (4) sehingga : 1 5 10 74 . 9 n Pd T = × (kg.mm) ... (5)
Besarnya tegangan geser yang diijinkan (a) dapat dihitung dengan
persamaan : ) /(sf1 sf2 b a =τ × τ ... (6)
31
b = Kekuatan tarik (kg/mm2)
sf1 = Faktor keamanan dari faktor kelelahan puntir, harga 5.6 bahan SF dan 6.0 bahan S-C
sf2 = Faktor bentuk fisik karena pengaruh konsentrasi tegangan dan kekasaran permukaan dengan harga 1.3 sampai 3.0
Dari persamaan diatas diperoleh rumus untuk menghitung diameter poros yaitu : 3 / 1 1 . 5 = K CT d t b a s τ ... (7)
dimana : ds = Diameter poros (mm)
Kt = Faktor keamanan oleh pengaruh keadaan momen puntir,
besarnya antara 1.0 sampai 3.0
Cb = Faktor pengaruh beban adanya beban lentur oleh transmisi
lain, besarnya antar 1.2 sampai 2.3, bila tidak ada, Cb = 0 Daya yang dihasilkan oleh motor stepper dapat diketahui dengan persamaan:
P = T x ………...……...… (8) Dari persamaan 8 di atas daya yang dihasilkan oleh motor stepper:
Torsi motor stepper = 1.25 Nm Putaran maksimum = 500 rpm Kecepatan sudut ( 1) = 2 x x n ………....……. (9) = 60 500 14 . 3 2× × = 52360 rad/s P = 1.25 x 52360 P = 65450 Watt P = 0.065 kW Daya rencana : Pd = 0.065 x 1.2 = 0.079 kW
Momen puntir : T = 9.74 x 105 x 500 079 . 0 T = 153 kg.mm
Bahan poros adalah baja difinis dingin (S35C−D), alasan pemakaian adalah poros dapat dibubut, digerinda, dan perlakuan lainnya. Bahan ini memiliki kekuatan tarik b = 53 kg/mm2, dengan Sf1 = 6 dan Sf2= 2, maka
tegangan geser yang diijinkan :
a =
2 6
53
× = 4.42 kg/mm2
Faktor koreksi untuk momen puntir adalah Kt =1.5 dan beban dikenakan secara halus dengan faktor lenturan adalah Cb = 2. Dari nilai-nilai tersebut diameter poros dapat ditentukan :
ds = ×1.5×2×153 42 . 4 1 . 5 1/3 = 8.1 mm
Dari hasil perhitungan diameter poros minimal 8,1 mm. Poros yang digunakan pada plat poros besi berdiameter 30 mm dan diameter poros gearbox 15 mm, sehingga cukup aman dalam penggunaannya.
2. Torsi yang dihasilkan oleh joint sudut
Torsi pada joint 1 dapat dihitung dengan persamaan reduksi dari worm-gear yaitu:
R T
T2 =η× 1× ... (10)
Dimana : T2 = Torsi keluaran dari poros roda gigi (Nm) T1 = Torsi masukan ke roda cacing (Nm)
= Efisiensi (%) R = Rasio
Torsi yang dihasilkan oleh motor stepper sebesar 1.26 Nm. Perbandingan rasio dari gearbox dengan sistem transmisi worm-gear yaitu 1 :
33 10. efisiensi ( ) penyaluran tenaga reduction gear sebesar 99 %, sehingga torsi yang dihasilkan oleh joint 1 dapat dihitung
T2 = 1 10 26 . 1 % 99 × × T2 = 12.474 Nm
Jadi torsi yang dihasilkan pada joint sudut sebesar 12.474 Nm. 3. Gaya dorong ulir yang diperlukan untuk mendorong link horizontal
Besarnya gaya dorong yang diperlukan untuk menaikkan link horizontal dapat dihitung dengan menggunakan rumus:
g m F = × ………...……… (11) Dimana : F = gaya (N) m = massa benda (kg) g = percepatan gravitasi (m/s2)
Besarnya massa dari link dan joint horizontal sebesar 4.84 kg. Gaya grafitasi sebesar 9,8 m/s2., sehingga besarnya gaya dorong yang diperlukan
F = 3.23 x 9.8 F = 31.654 N
Jadi gaya yang diperlukan untuk mendorong ke atas link dan joint horizontal harus lebih besar dari 31.654 N
Gaya dorong ulir dapat diketahui dengan perhitungan ulir tenaga (power screw). Persamaan yang digunakan untuk menghitung gaya dorong ulir adalah (Shigley dan Mischke, 2001):
− + = fl d fd Fd T m m m π π 1 2 ... . (12) di mana: T = torsi pada ulir (Nm)
F = gaya dorong ulir (N) dm = diameter efektif ulir (m) f = koefisien gesek permukaan ulir l = kisar/pitch (m)
Torsi pada ulir dapat diketahui dengan menghitung torsi motor DC yang melewati worm-gear. Torsi yang di hasilkan oleh motor DC dapat diketahui melalui persamaan berikut:
ω
P
T = ... (13) Dimana : T = Torsi (N.m)
P = Daya (Watt)
= Kecepatan sudut (rad/s)
Besarnya daya pada motor DC 60 Watt dan putaran motor 3000 rpm, kecepatan sudut dapat diketahui dengan persamaan berikut:
= 2 x x n = 60 3000 14 . 3 2× × = 314.159 rad/s
Maka besar torsi motor DC T = 159 . 314 60 T = 0.191 Nm
Torsi yang dihasilkan oleh motor DC sebesar 0.191 Nm. Perbandingan rasio dari worm-gear yaitu 1 : 30. efisiensi ( ) penyaluran tenaga reduction gear sebesar 99 %, sehingga torsi pada ulir dapat dihitung
T2 = 1 30 191 , 0 % 99 × × T2 = 5.672 Nm
Torsi pada ulir didapatkan sebesar 5.672 Nm. Ulir yang digunakan pada disain ini adalah ulir recirculating ball screws. Terdapat bola atau rol yang berputar di antara ulir dengan nut, sehingga gesekan di antaranya akan jauh lebih kecil. Gesekan yang terjadi ini diperkecil lagi dengan pemberian pelumas pada bola atau rol tersebut. Maka koefisien gesek antara ulir dengan nut sebesar 0.11 yang merupakan koefisien gesek antara baja dengan baja atau besi yang diberi pelumas (Kurtus, 2005). Ulir memiliki diameter dalam 21 mm dan diameter luar 25 mm. Diameter
35 diambil diameter efektif 23 mm. Sudut ulir sebesar 900 dan panjang kisar 10 mm Berdasarkan persamaan gaya dorong ulir:
× − × × + × = − − − − ) 10 10 )( 11 . 0 ( ) 10 23 ( ) 10 23 )( 11 . 0 ( 1 2 ) 10 23 ( 672 , 5 3 3 3 3 π π F F = 34.818 N
Dari hasil diatas didapatkan gaya dorong yang dihasilkan ulir untuk menggerakkan link dan joint horizontal kearah atas adalah 34.818 N. Nilai ini lebih besar dari gaya ke bawah dari link dan joint horizontal yang besarnya 31.654 N .
E. ANALISIS MODIFIKASI MANIPULATOR
Modifikasi manipulator dari segi konstruksi hanya dilakukan pada bagian motor. Motor yang digunakan sebelumnya adalah motor AC dan diganti dengan motor DC. Untuk penjelasannya ada dipembahasan.
Modifikasi manipulator dari segi elektronika dan pemrograman dilakukan pada hardware dan software-nya. Pada hardware, rangkaian elektronika yang digunakan sebelumnya (khusus yang dimodifikasi) adalah rangkaian pengendali motor AC, rangkaian penghitung pulsa encoder, rangkaian pembaca pulsa penghitung encoder, serta rangkaian pengendali lama putaran motor servo AC dan diganti dengan rangkaian pengendali servo motor DC vertikal dan horisontal, dan rangkaian penguat servo motor DC horisontal. Pada software, pemrograman sebelumnya dibuat untuk mengeksekusi joint secara sendiri-sendiri dan diganti dengan pemrograman untuk mengeksekusi joint secara bersamaan. Untuk gambar perbandingan manipulator antara sebelum dan sesudah dimodifikasi ada pada lampiran 22.
V. HASIL DAN PEMBAHASAN A. KONSTRUKSI PROTOTIPE MANIPULATOR
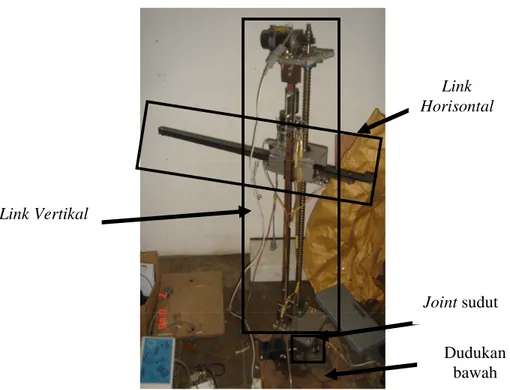
Manipulator yang telah dibuat dapat dilihat pada gambar 10.
Gambar 10. Manipulator yang telah dibuat
Bagian-bagian konstruksi penyusun manipulator yaitu antara lain: 1. Dudukan Bawah
Dudukan bawah menggunakan plat besi dengan ukuran 400 mm x 400 mm dan ketebalan 20 mm. Plat besi ini kemudian di lubangi pada sisi-sisi sikunya dengan ukuran diameter 4 mm. Diameter lubang ini disesuaikan dengan diameter lubang pemasangan pada roda caster. Plat besi ini di lubangi pada sisi-sisinya sebagai tempat untuk memasang empat roda caster yang memiliki ukuran tinggi sekitar 34 mm dengan diameter roda 25 mm.
Pada bagian tengah plat besi ini juga dilubangi untuk pemasangan gearbox. Plat besi ini dilubangi dengan diameter lubang 8 mm yang disesuaikan dengan lubang pemasangan pada gearbox. Komponen
Joint sudut Dudukan bawah Link Vertikal Link Horisontal
Gambar 11. Roda caster yang dipasang pada plat besi.
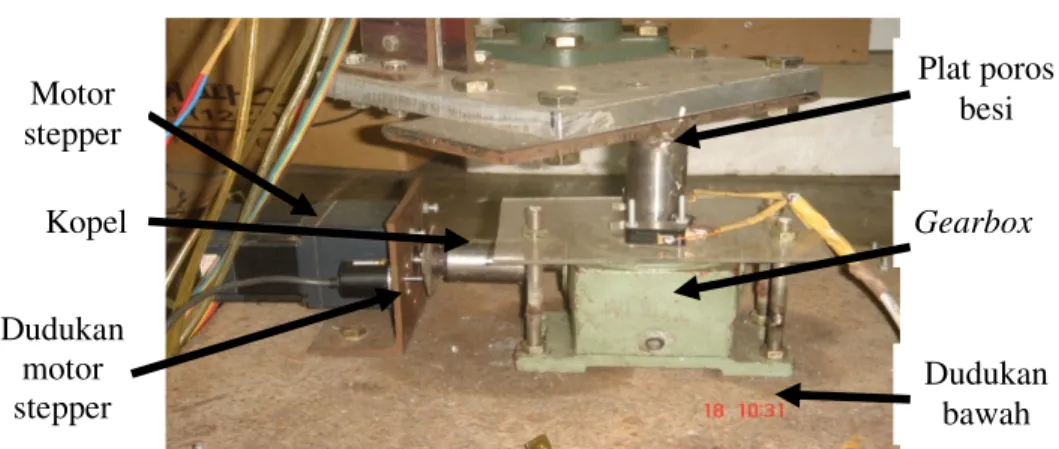
2. Joint Sudut
Joint sudut terdiri dari gearbox, kopel, dudukan motor stepper, motor stepper, dan plat poros besi. Gearbox dipasang pada plat besi pada dudukan bawah dengan pengencangan menggunakan baut berdiameter 8 mm sebanyak empat buah pada masing-masing sisinya.
Dudukan motor stepper terbuat dari besi siku ukuran 92 mm x 92 mm yang pada salah satu bagiannya dipotong, sehingga ukurannya menjadi 92 mm x 50 mm. Pada bagian dengan ukuran 50 mm dilubangi dengan diameter 8 mm sebanyak dua buah untuk pemasangan pada plat besi pada dudukan bawah yang kemudian dikencangkan dengan baut berdiameter 8 mm. Pada bagian yang ukurannya 92 mm dilubangi dengan ukuran 4 mm sebanyak empat buah yang disesuaikan dengan lubang pemasangan pada motor stepper yang kemudian dikencangkan dengan baut berdiameter 4 mm.
Kopel terbuat dari poros besi pejal yang berdiameter 30 mm. Pada salah satu bagiannya dilubangi dengan diameter 8 mm mrnyesuaikan dengan poros motor stepper dan pada bagian lainnya dilubangi dengan diameter 10 mm menyesuaikan dengan poros masukan dari gearbox. Pengencangan antara kopel dengan poros motor stepper dan poros masukan gearbox yaitu menggunakan baut berdiameter 6 mm sehingga kopel harus dilubangi dengan diameter 5.5 mm dan ditaps dengan ukuran diameter 6 mm.
Roda Caster Plat besi