PEMODELAN SISTEM DAN ANALISIS STABILITAS MATRA LONGITUDINAL
PUNA WULUNG UNTUK PENGEMBANGAN SISTEM KENDALI TERBANG
OTONOMUS
Fadjar R. Triputra 1), Bambang R. Trilaksono 2), Rianto A. Sasongko 3), M. Dahsyat 4). 1) Pusat Teknologi Informasi dan Komunikasi Badan Pengkajian dan Penerapan Teknologi
E-mail: fadjar.rahino@bppt.go.id
2) Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung 3) Fakultas Teknik Mesin dan Dirgantara Institut Teknologi Bandung
4) Pusat Teknologi Industri Pertahanan dan Keamanan Badan Pengkajian dan Penerapan Teknologi
Abstrak
Perancangan sistem kendali otonomus untuk PUNA Wulung memerlukan adanya representasi matematis dinamika kendalian dalam bentuk pemodelan sistem yang dapat diperoleh baik secara analitis maupun secara empiris. Makalah ini membahas tentang metode pemodelan sistem PUNA Wulung menggunakan perangkat lunak digital DATCOM sebagai alat bantu menghitung parameter-parameter aerodinamika yang dibutuhkan sehingga terbentuk model-model analitis sistem terbuka matra longitudinal pada saat terbang steady dengan sudut serang, ketinggian dan kecepatan yang bervariasi. Model empiris juga dibentuk berdasarkan identifikasi data uji terbang sebagai validasi model analitis. Perbandingan hasil simulasi sistem kedua model tersebut memperlihatkan kemiripan pola tanggapannya. Selain itu, model analitis memperlihatkan bahwa sistem terbuka PUNA Wulung akan stabil pada rentang sudut serang antara -3,7 hingga 15,5 derajat pada kecepatan 72,7 knot di ketinggian 2.950 kaki.
Kata kunci: pemodelan sistem, analisis stabilitas, PUNA Wulung
Pendahuluan
PUNA Wulung adalah salah satu jenis Pesawat Udara Nir Awak yang dikembangkan oleh Pusat Teknologi Industri Pertahanan dan Keamanan Badan Pengkajian dan Penerapan Teknologi untuk mengemban misi-misi penerbangan otonomus jarak menengah seperti misi pengawasan, misi pengaturan cuaca, misi pencarian, misi foto udara, misi pengintaian dsb. Misi-misi ini memiliki nilai yang sangat strategis untuk sipil dan militer dalam menyelesaikan permasalahan dibidang ekonomi, sosial politik, hukum, pertahanan dan keamanan negara. PUNA Wulung berbobot 120 kg, memiliki bentang sayap 6,3 m dan panjang 4,32 m serta bermesin pendorong 20 HP dengan kemampuan jelajah hingga 200 km seperti diperlihatkan pada Gambar 1.
Gambar 1. PUNA Wulung BPPT01A-PA6
Makalah ini menyajikan metode pemodelan sistem PUNA Wulung untuk memperoleh model-model linier state-space matra longitudinal dalam kondisi terbang steady di rentang ketinggian, kecepatan dan sudut serang tertentu. Kestabilan sistem terbuka PUNA Wulung dapat direpresentasikan dengan model-model linier tersebut yang dibutuhkan dalam pengembangan sistem kendali secara otonomus lebih lanjut yang alur tahapannya diperlihatkan pada Gambar 2.
Pengembangan sistem kendali terbang otonomus dengan berbagai model linier matra longitudinal telah dilakukan untuk pesawat jenis WiSE (Muhammad, 2007) untuk mengendalikan ketinggian pesawat berada di atas air. Kedua makalah ini menggunakan perangkat lunak digital DATCOM (Anon., 1979) untuk memperoleh parameter aerodinamika pesawat sebagai dasar pemodelan sistem kendali otonomusnya. Pemodelan sistem untuk PUNA Wulung BPPT01A-PA6 hingga identifikasi berdasarkan uji terbang juga pernah dilakukan (Triputra, 2011) tetapi koefisien aerodinamika pembentuk modelnya masih menggunakan hasil dari makalah pertama di atas.
Gambar 2. Tahapan perancangan sistem kendali otonomus PUNA Wulung
Makalah ini membahas tentang metode pemodelan sistem menggunakan perangkat lunak DATCOM+ (Anon., 2011) untuk memperoleh koefisien-koefisien aerodinamika beserta turunannya yang diperlukan sebagai basis perhitungan model linier state-space matra longitudinal pada kondisi terbang steady tertentu (Cook, 2007; Schmidt, 2012; dan Anon., 1962). Selain model berdasarkan hasil analitis, makalah ini juga membahas tentang model yang dibentuk berdasarkan hasil empiris berdasarkan identifikasi data uji terbang dengan perangkat lunak toolbox sistem identifikasi MATLAB (Sadewo, 2011 dan Ljung, 1997) yang memiliki dua metode identifikasi yaitu black-box dan grey-box. Metode black-box membentuk model tanpa menggunakan prinsip-prinsip fisika, sedangkan grey-box menggunakannya. Makalah ini hanya terbatas pada model empiris yang dibentuk menggunakan metode black-box. Model empiris ini akan memberikan keabsahan hasil terhadap model analitis berbasis koefisien-koefisien yang diperoleh dari DATCOM. Makalah ini juga akan membahas tentang analisis stabilitas atas model-model analitis yang dapat dibentuk menggunakan parameter sudut serang, kecepatan dan ketinggian saat terbang steady untuk memperlihatkan batas rentang kestabilan sistem terbuka PUNA Wulung.
Konfigurasi PUNA Wulung BPPT01A-PA6
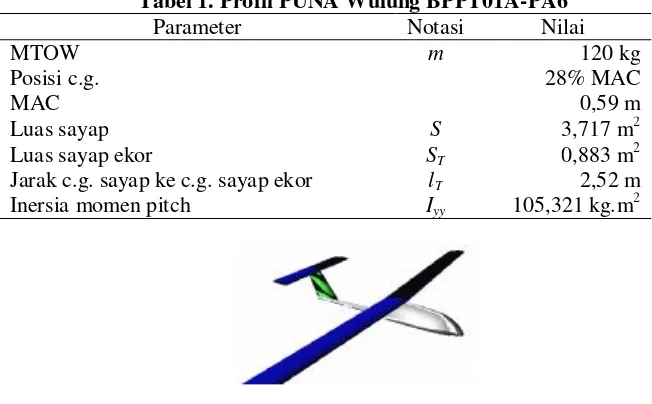
PUNA Wulung BPPT01A-PA6 memiliki konfigurasi seperti yang diperlihatkan pada Tabel 1, sedangkan bentuk geometri PUNA Wulung yang dihasilkan dari tampilan DATCOM+ diperlihatkan pada Gambar 3.
Tabel 1. Profil PUNA Wulung BPPT01A-PA6
Parameter Notasi Nilai
MTOW m 120 kg
Inersia momen pitch Iyy 105,321 kg.m
2
Gambar 3. Geometri PUNA Wulung hasil tampilan DATCOM+ • Model state-spacesistem
Koefisien-koefiesien Aerodinamika
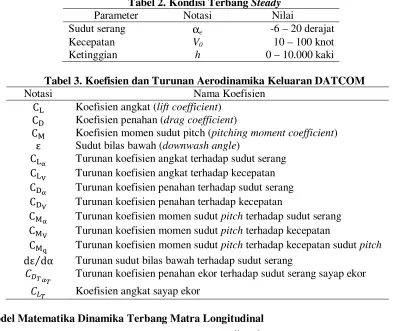
Koefisien-koefisien aerodinamika diperoleh dengan menggunakan perangkat lunak digital DATCOM berdasarkan masukan kondisi terbang steady seperti yang diperlihatkan pada Tabel 2. Sedangkan koefisien-koefisien yang dihasilkan DATCOM untuk perhitungan model linier
state-space matra longitudinal diperlihatkan pada Tabel 3.
Tabel 2. Kondisi Terbang Steady
Parameter Notasi Nilai
Sudut serang αe -6 – 20 derajat
Kecepatan V0 10 – 100 knot
Ketinggian h 0 – 10.000 kaki
Tabel 3. Koefisien dan Turunan Aerodinamika Keluaran DATCOM
Notasi Nama Koefisien
C Koefisien angkat (lift coefficient)
C Koefisien penahan (drag coefficient)
C Koefisien momen sudut pitch (pitching moment coefficient)
ε Sudut bilas bawah (downwash angle)
C Turunan koefisien angkat terhadap sudut serang
C Turunan koefisien angkat terhadap kecepatan
C Turunan koefisien penahan terhadap sudut serang
C Turunan koefisien penahan terhadap kecepatan
C Turunan koefisien momen sudut pitch terhadap sudut serang
C Turunan koefisien momen sudut pitch terhadap kecepatan
C Turunan koefisien momen sudut pitch terhadap kecepatan sudut pitch dε dα⁄ Turunan sudut bilas bawah terhadap sudut serang
Turunan koefisien penahan ekor terhadap sudut serang sayap ekor
Koefisien angkat sayap ekor
Model Matematika Dinamika Terbang Matra Longitudinal
Gambar 4. Komponen-komponen kecepatan matra longitudinal saat terbang steady
Kondisi terbang steady adalah kondisi terbang dengan sudut roll nol derajat simetri lateral dengan komponen-komponen kecepatan matra longitudinal seperti yang diperlihatkan pada Gambar 4. Notasi yang digunakan pada persamaan diferensial dinamika terbang matra longitudinal diperlihatkan pada Tabel 4. Arah aksial (x) adalah arah yang sama dengan arah ke depan pesawat, dan arah normal (z) adalah arah yang sama dengan arah ke bawah pesawat. Dinamika terbang untuk matra longitudinal diekspresikan dengan pendekatan persamaan diferensial yang menghasilkan persamaan dalam bentuk matriks dan vektor berikut ini (Cook, 2007):
1 − ̇ 0 0 Persamaan (1) kemudian diubah dalam bentuk notasi berikut:
Tabel 4. Daftar notasi yang digunakan
Notasi Keterangan
Kecepatan pesawat pada komponen aksial Kecepatan pesawat pada komponen normal Sudut pitch dengan garis horizon bumi
Kecepatan gangguan kecil pada komponen aksial Sudut serang gangguan kecil (= arctan{ ( ⁄ + )}) Kecepatan sudut pitch gangguan kecil
Sudut pitch gangguan kecil
Kecepatan gangguan kecil pada komponen normal Defleksi elevator pesawat
∗ Turunan gaya aksial terhadap masing-masing u, w, ̇, q, θ , dan δe
∗ Turunan gaya normal terhadap masing-masing u, w, ̇, q, θ, dan δe
∗ Turunan momen sudut pitch terhadap masing-masing u, w, ̇, q, dan δe
Rasio volume sayap ekor dan sayap utama
a1 Kemiringan kurva koefisien angkat sayap ekor
a2 Kemiringan kurva koefisien angkat elevator
kT Konstanta umum sayap ekor
Tabel 5. Kalkulasi Koefisien-koefisien Aerodinamika (Cook, 2007)
Koefisien Turunan terhadap
u w q ̇ δe
∗ −2 − − − d d −2
∗ −2 − − − − d d −
∗ ≡ ̿ d d −
∗ 2 2 4 ̿ ̇ ̿4 2
∗ 2 2 ̿
4 ̇
̿
4
2 ∗ 2 ̿
̿ 2
̿
4 ̇
̿
4
̿ 2
Dengan melakukan subtitusi = dan = , maka diperoleh model linier
state-space secara umum berikut ini:
ẋ = Ax + Bu (3)
Kerapatan udara dalam troposphere (0 - 11.000 meter) dihitung dengan (Schmidt, 2012):
= (3,4158 ×10 )(518,69− (1,17 ×10 )ℎ) . kg/m3 (4) dimana h adalah ketinggian terbang dalam unit meter.
Berdasarkan perhitungan dari Tabel 5 dan perhitungan koefisien dari DATCOM, model linier state-space persamaan (3) bergantung pada sudut serang, kecepatan dan ketinggian terbang saat kondisi terbang steady sehingga dapat diperluas sebagai model linier yang bergantung pada parameter berikut ini:
ẋ = A( , , ℎ)x + B( , , ℎ)u (5)
Model Empiris Uji Terbang
Uji terbang PUNA Wulung telah dilakukan pada kondisi terbang steady pada kecepatan 72,7 knot di ketinggian 2.950 kaki. Model empiris dibangun berdasarkan data uji menggunakan
toolbox identifikasi sistem MATLAB dengan metode black-box yang menghasilkan perbandingan
kesesuaian seperti yang diperlihatkan pada Gambar 5.
Gambar 5. Perbandingan kesesuaian model empiris dengan data uji terbang Hasil Simulasi Model Analitis dan Model Empiris
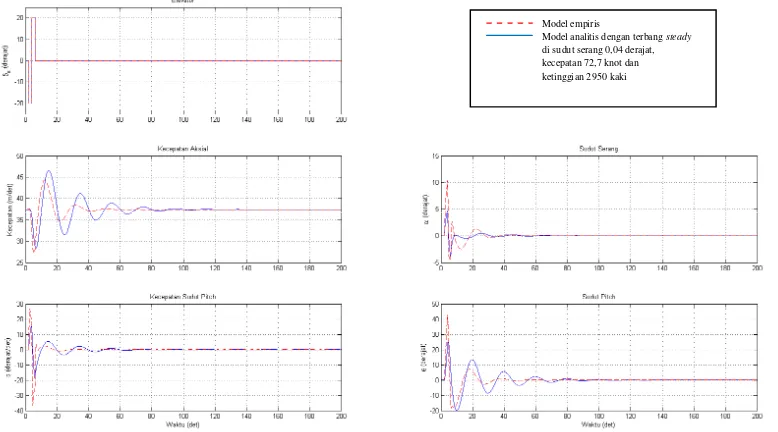
Model analitis dan model empiris yang sesuai dengan kondisi saat uji terbang diperlihatkan pada Tabel 6. Hasil simulasi sistem akibat gerakan doublet elevator diperlihatkan pada Gambar 6 yang memperlihatkan kemiripan pola tanggap pada kedua model.
Gambar 6. Simulasi sistem akibat gerakan doublet elevator
Tabel 6. Model Uji Terbang saat Kecepatan 72,7 Knot dan Ketinggian 2.950 Kaki
Item Model Analitis Model Empiris
Matriks A
−0,0352 0,2581 −0,0274 −9,8100 −0,5230 −4,0079 35,0966 −0,0071 0,9464 6,2340 −68,4481 0,0128
0 0 1 0
−0,1612 0,1092 −0,7363 −10,6551 −0,6720 −1,9278 27,0977 2,0249 −0,0436 −0,2073 −2,9219 −0,2748
0,0021 −0,0058 1,1254 0,0174
Matriks B [−0,6163 −5,4966 −6,0979 0] [−2,4917 4,4174 −5,9059 0,0898]
Akar Polinomial A
−71,6810 −0,7212 −0,0445 + 0,3147i
−0,0445– 0,3147i
−2,4000 + 2,3514i −2,4000 – 2,3514i −0,0968 + 0,3215i
−0,0968– 0,3215i
Model empiris
Model analitis dengan terbang steady di sudut serang 0,04 derajat, kecepatan 72,7 knot dan ketinggian 2950 kaki
Kecepatan aksial Fit: 57,68%
Kecepatan normal Fit: 23,49%
Kecepatan sudut pitch Fit: 75,4%
Sudut pitch Fit: 62,5% Pengukuran
Analisis Kestabilan
Tabel 7 memperlihatkan hasil akar polinomial matriks A model analitis di kondisi terbang
steady yang memperlihatkan kestabilan sistem terbuka PUNA Wulung pada sudut serang antara
-3,7 dan 15,5 derajat. Akar bilangan nyata positif menunjukkan ketidakstabilan.
Tabel 7. Model Analitis saat Kecepatan 72,7 Knot dan Ketinggian 2.950 Kaki
Sudut Serang -3,8 -3,7 … 15,5 15,6
Makalah ini telah memperlihatkan tentang pembentukan model linier dinamik matra longitudinal yang bergantung pada parameter secara analitis berdasarkan penggunaan koefisien-koefisien yang diperoleh dari DATCOM. Model empiris dari data uji terbang pada kecepatan 72,7 knot dan ketinggian 2.950 kaki memperlihatkan pola tanggapan yang mirip dengan model analitis matra longitudinal terkait. Analisis kestabilan menunjukkan bahwa rentang sudut serang model analitis untuk sistem terbuka yang stabil pada kondisi terbang tersebut adalah antara -3,7 hingga 15,5 derajat. Perancangan sistem kendali otonomus pada matra longitudinal selanjutnya dapat mengacu pada pendekatan model analitis yang bergantung pada parameter saat kondisi terbang
steady seperti pendekatan kendali menggunakan sistem gain scheduling dan linear
parameter-varying sehingga akan diperoleh sistem kendali yang robust.
Penelitian selanjutnya adalah membentuk model linier dinamik matra lateral-direksional sehingga diperoleh sistem kendali terbang PUNA yang lengkap. Sistem kendali ini kemudian akan dapat menjadi dasar untuk penelitian sistem kendali yang lebih maju seperti sistem kendali terbang otonomus PUNA berbasis citra.
Daftar Pustaka
Anon., 1962, U.S. Standard Atmosphere, U.S. Government Printing Office, Washington AS
Anon., 1979, The USAF Stability and Control DATCOM – Volume I, User Manual -, McDonnell Douglas Astronautics Company, Missouri AS
Anon., 2011, Datcom+ Pro User Manual, Holy Cows Inc, Orlando AS
Cook, 2007, Flight Dynamic Principles –A Linear Systems Approach to Aircraft Stability and
Control -, Second Edition, Elsevier Ltd., Burlington AS
Indriyanto, 2007, Perancangan Sistem Kendali Terbang Otomatik Matra Longitudinal dan
Lateral-Direksional Pesawat Udara Nir-Awak (PUNA), Jurnal Pengkajian Industri BPPT No. 24, 1-8
Ljung, 1997, System Identification Toolbox –For Use with MATLAB-, The MathWorks, Inc., Natick AS
Muhammad, 2007, Development of Automatic Flight Control Systems for Wing In Surface Effect
Craft, Automatic Control in Aerospace, Vol. 17, Part 1, Universitas Studii Tolosana Perancis
Sadewo, 2011, Identifikasi Sistem Pesawat Tanpa Awak Oktorotor, Tesis Master STEI Institut Teknologi Bandung
Schmidt, 2012, Modern Flight Dynamics, McGraw-Hill, New York AS
Triputra, 2011, Rancang Bangun Sistem Kendali Multivariabel Robust untuk PUNA BPPT