PENGARUH BEBAN DAN KONDISI PEMBEBANAN TERHADAP
KARAKTERISTIK GERAK SISTEM PENGGERAK PRESISI
Ahmad Su’udi
Dosen Jurusan Teknik Mesin Universitas Lampung
ABSTRAK
Dalam kehidupan sehari-hari sering dijumpai berbagai jenis sistem penggerak, dengan bermacam sumber penggerak seperti motor listrik, tenaga angin, tenaga air dan sebagainya. Dengan adanya sistem penggerak ini, kita dapat memindahkan benda ke posisi tertentu, baik sebagai gerak linier, gerak sudut maupun kombinasi keduanya. Sistem penggerak dirancang untuk tujuan tertentu, misalnya untuk gerakan presisi dan akurat. Sistem penggerak presisi atau Precision Driving System (PDS) dapat memindahkan benda ke posisi yang diinginkan dengan tepat. Fenomena ini sangat menarik dan menimbulkan keingintahuan lebih lanjut bagaimana jika pada Sistem Penggerak Presisi diberikan beban dan dengan tipe pembebanan yang berbeda pula. Penggerak yang digunakan pada PDS ini adalah motor penapak (stepper motor) tipe unipolar HM004 dan roller dibuat dari fiber. Sistem transmisi yang digunakan adalah tipe gesek yang merubah gerak putar menjadi gerak translasi. Sistem mekanis-nya dibuat dari aluminum dan sebagai kontrol input digunakan program Delphi. Pengujian dilakukan untuk mengetahui performan PDS, difokuskan pada kondisi tanpa beban, pemberian beban dan pemberian jenis pembebanan yang berbeda. Hasil dari pengujian didapat bahwa performan PDS sangat baik. Kecepatan PDS sangat bergantung pada beban yang ada. Semakin besar beban, maka kecepatannya semakin lambat. Pada besar beban yang sama, jenis pembebanan momen lebih berpengaruh dari pada pembebanan tarik. Tetapi, tingkat presisi dari PDS tidak terpengaruh oleh beban yang ada.
____________________________________________________________________
Keywords: Sistem Penggerak Presisi, motor penapak, pembebanan, kecepatan.
PENDAHULUAN
Dalam kehidupan sehari-hari
baik itu didunia industri maupun non
industri banyak dijumpai sistem
penggerak. Sumber penggerak yang
digunakan juga bermacam-macam,
contohnya
sistem
penggerak
menggunakan
motor
listrik,
menggunakan
tenaga
angin,
memanfaatkan tenaga air, dan lain
sebagainya.
Dengan
adanya
penggerak ini sebuah benda dapat
berpindah dari satu posisi ke posisi
lainnya, baik itu linier,
angular,
maupun
kombinasi
keduanya.
Penggerak-penggerak
tersebut
dirancang sedemikian rupa sesuai
dengan
kebutuhan
pemakaianya,
apakah untuk gerakan-gerakan yang
memerlukan ketelitan atau sebaliknya.
Pada penggerak presisi, penggerak
jenis ini mampu memindahkan benda
ke posisi yang diinginkan dengan
tepat. Fenomena ini sangat menarik
dan
menimbulkan
keingintahuan
lebih lanjut mengenai bagaimana jika
pada penggerak presisi dikenai beban
dan
kondisi
pembebanan
yang
berbeda pula, apakah masih dapat
melakukan gerakan presisi seperti
pada keadaan tanpa beban. Karena itu
tujuan dari penelitian ini adalah
menguji kinerja penggerak presisi
pada kondisi tanpa beban dan untuk
mengetahui
pengaruh
pemberian
beban
dan
variasi
kondisi
Mekanisme pemosisian teliti dan
presisi
banyak
digunakan
oleh
produk-produk industri antara lain
alat ukur, penggerak piringan (
disk
drive
), DVD,
Laser Disk, dan lain-lain.
Produk-produk
tersebut
dipakai
dalam
lingkungan
yang
membutuhkan ketelitian tinggi. Ada
beberapa sistem penggerak yang
dapat
dipakai
pada
mekanisme
pemosisian presisi yaitu
(2):
1. Sistem penggerak menggunakan
udara (
air driven actuation
) atau
yang dikenal dengan penggerak
pneumatik.
2. Sistem penggerak menggunakan
motor listrik dengan transmisi ulir
bola (ballscrew).
3. Sistem penggerak menggunakan
motor linier.
4. Sistem penggerak menggunakan
motor
listrik
dengan
memanfaatkan gesekan (friction
drive)
Diantara keempat sistem penggerak
tersebut di atas, sistem penggerak
gesek sangat cocok untuk gerakan
presisi. Sebagai penggerak dapat
menggunakan motor penapak
(motor
stepper)
(3).
Motor Penapak
Motor penapak
(motor stepper)
adalah suatu motor berarus DC yang
dapat
digunakan
untuk
mengendalikan gerakan terarah yang
dapat
diatur
untuk
setiap
langkahnya.
(7)Definisi yang lain
mengenai motor penapak adalah
suatu
peralatan
berbasis
elektromekanis yang merubah sinyal
elektrik
menjadi
gerakan-gerakan
mekanis diskrit.
(4)Contoh gambar
motor penapak dapat dilihat pada
Gambar 1.
Gambar 1. Motor penapak jenis
KP4M4-001; 3,6
0per step
(7)Motor penapak menggunakan
medan magnet untuk menggerakkan
rotornya. Gerakan langkahnya dapat
berupa satu langkah penuh, setengah
langkah atau berupa langkah-langkah
pendek tertentu. Motor penapak
dapat melakukan gerakan secara
prsesisi, mudah digunakan terutama
untuk percepatan rendah atau untuk
penerapan beban statis.
(8).
Motor
penapak hanya akan bekerja apabila
diberikan input tegangan dalam
bentuk
pulsa
pada
terminal-terminalnya
sebagaimana
skema
berikut :
pulsa berikutnya yang diberikan
logika 1 adalah terminal B maka inti
akan bergerak ke B, begitu seterusnya.
Motor
penapak
adalah
motor
komunikatif
karena
kita
dapat
mengendalikan atau menggerakkan
motor penapak sejauh yang kita
inginkan
dengan
bahasa
pemrograman
pascal
atau
delphi.
Hubungan Kecepatan Sudut dengan
Kecepatan Linier
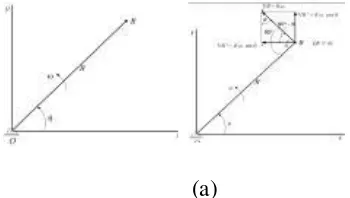
Perhatikan
sebuah
penghubung kaku yang berputar
terhadap satu titik tetap, O, seperti
ditunjukkan dalam Gambar 2a. Jarak
antara O dan B adalah R, dan garis
O-B membuat suatu sudut sebesar θ
terhadap sumbu x.
Gambar 2. Hubungan kecepatan
sudut dan kecepatan linier
(5)Kecepatan total titik B dapat diperoleh
dengan menjumlahkan secara vektor
kedua
komponen
tegak
lurus
(Holowenko, 1984), dengan hasil
seperti terlihat dalam Gambar 2b :
V
B= Rω sin θ + Rω cos θ = Rω
Pada sistem penggerak presisi
dengan motor stepper, batang traksi
bergerak linier akibat adanya gesekan
antara
roller
dengan batang traksi.
Kecepatan linier batang traksi yang
menempuh
suatu
perpindahan
tertentu dalam jangka waktu tertentu
adalah:
traksi (mm/s)
S
=
perpindahan
yang
ditempuh batang traksi (mm)
t = waktu (s)
Kecepatan linier dari
roller
(V
B) dan
kecepatan linier batang traksi (v)
adalah sama, atau secara matematis :
v
V
B
(3)
Dengan mengetahui data putaran per
menit (rpm) roller untuk setiap posisi
timer, maka berdasarkan persamaan
(4) kecepatan linier dari
roller
secara
teoritis dapat diketahui.
METODE PENELITIAN
Data teknis motor penapak yang
digunakan adalah sebagai berikut :
Jenis Motor Stepper : Unipolar
motor stepper HM004 TEAC 1403
P.N.O.14769070-90
produksi
Shinano Kenshi Co, Ltd Japan
Jumlah step : 200 step/revolution
Degree/step : 1,8
0
Diameter roller : 23,8 mm
Alat dan bahan yang digunakan
dalam penelitian ini antara lain :
1. Landasan luncur yang terbuat dari
aluminium.
2. Batang traksi sepanjang 300 mm
3. Motor Stepper
4. Roller
5. Kabel Data
6. Rangkaian Penguat Elektronik
7. Komputer (PC)
8. Tachometer
Penelitian dilakukan di Laboratorium
Jurusan Teknik Mesin Universitas
Lampung pada bulan Februari – Mei
2007
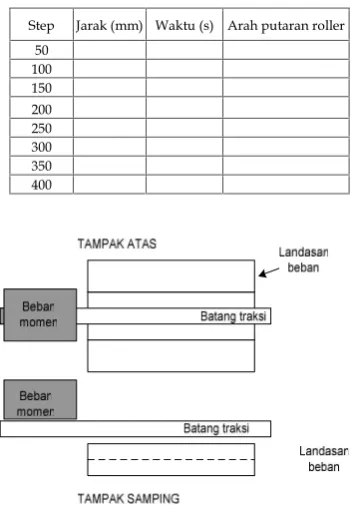
Gambar 3. Skema peralatan
Penggerak gesek dengan motor
stepper
Proses pengujian
Pengujian yang dilakukan adalah
pengujian kinerja penggerak gesek
untuk mengetahui apakah penggerak
gesek yang dibuat dapat melakukan
gerakan presisi sesuai dengan input
yang diberikan ke sistem dengan
memberikan
beban
dan
variasi
kondisi pembebanan yaitu berupa
beban tarik/tekan (lihat Gambar 3),
dan beban momen (lihat Gambar 4).
Tabel pengambilan datanya dapat
dilihat berikut ini.
Tabel 1. Tabel data kecepatan
penggerak gesek dalam satu posisi
timer untuk berbagai step yang
ditempuh
Step Jarak (mm) Waktu (s) Arah putaran roller 50
100 150 200 250 300 350 400
Gambar 4. Kondisi Pembebanan
momen
HASIL DAN PEMBAHASAN
Perbandingan kecepatan penggerak
presisi untuk berbagai jarak yang
ditempuh hasil pengujian dengan
hasil perhitungan teoritis.
Data
hasil
pengujian
ditampilkan dalam bentuk grafik dan
CPUBeban Landasan rel
Motor stepper
Kabel data
dibandingkan
dengan
kondisi
teoritisnya.
Untuk
mengetahui
kecepatan
teoritis,
berdasarkan
persamaan (4) kita bisa menghitung
kecepatan
teoritisnya
dengan
mengetahui putaran (rpm)
roller
motor stepper. Putaran
roller
motor
stepper didapat melalui pengukuran
menggunakan
tachometer
dan
hasilnya
untuk
masing-masing
pengujian ditampilkan berikut ini.
Jenis pengujian Putaranroller(rpm)
Pengujian tanpa beban : 5,5
Pengujian dengan beban I (300gram) : 1,1
Pengujian dengan beban II (450 gram) : 0,5
Pengujian dengan beban momen (300 gram) : 0,7
Dengan besar jari-jari roller motor
stepper sebesar 11,9 mm maka besar
masing-masing kecepatan teoritisnya
adalah :
Jenis pengujian Kecepatan teoritis (mm/s)
Pengujian tanpa beban : 6,8
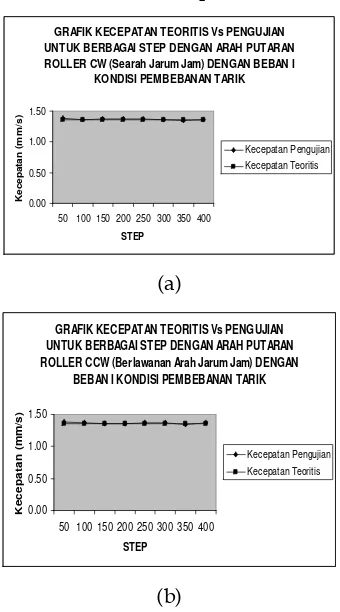
Pengujian dengan beban I (300gram) : 1,36
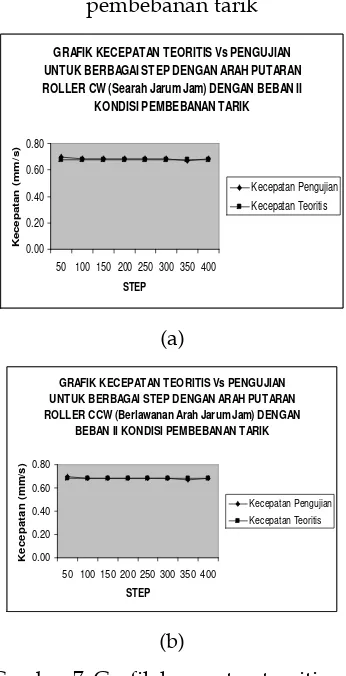
Pengujian dengan beban II (450 gram) : 0,68
Pengujian dengan beban momen (300 gram)
: 0,87
Grafik perbandingan kecepatan hasil
pengujian terhadap kecepatan teoritis
untuk
masing-masing
pengujian
dapat dilihat berikut ini.
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN
ROLLER CW (Searah Jarum Jam) TANPA BEBAN
0.00
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CCW (Berlawanan Arah Jarum Jam) TANPA
BEBAN
Gambar 5. Grafik kecepatan teoritis vs
pengujian untuk berbagai step (a) arah
putaran roller cw, (b) arah putaran
roller ccw , tanpa beban
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CW (Searah Jarum Jam) DENGAN BEBAN I
KONDISI PEMBEBANAN TARIK
0.00
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CCW (Berlawanan Arah Jarum Jam) DENGAN
BEBAN I KONDISI PEMBEBANAN TARIK
0.00
putaran roller cw, (b) arah putaran
roller ccw dengan beban I kondisi
pembebanan tarik
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CW (Searah Jarum Jam) DENGAN BEBAN II
KONDISI PEMBEBANAN TARIK
0.00
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CCW (Berlawanan Arah Jarum Jam) DENGAN
BEBAN II KONDISI PEMBEBANAN TARIK
0.00
Gambar 7. Grafik kecepatan teoritis vs
pengujian untuk berbagai step (a) arah
putaran roller cw, (b) arah putaran
roller ccw dengan beban II kondisi
pembebanan tarik
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CW (Searah Jarum Jam) DENGAN BEBAN I
KONDISI PEMBEBANAN MOMEN
0.00
GRAFIK KECEPATAN TEORITIS Vs PENGUJIAN UNTUK BERBAGAI STEP DENGAN ARAH PUTARAN ROLLER CCW (Berlawanan Arah Jarum Jam) DENGAN
BEBAN I KONDISI PEMBEBANAN MOMEN
0.00
Gambar 8. Grafik kecepatan teoritis vs
pengujian untuk berbagai step (a) arah
putaran roller cw, (b) arah putaran
roller ccw dengan beban I kondisi
pembebanan momen
Dari Gambar 5, Gambar 6, Gambar 7
dan Gambar 8 secara umum terlihat
hampir semua titik data saling
berimpit. Hal ini berarti antara
kecepatan
hasil
pengujian
dan
kecepatan teoritis dapat dikatakan
hampir sama. Dengan kata lain,
kinerja sistem penggerak presisi yang
digunakan
sudah
baik.
Adanya
beberapa titik yang berbeda antara
teoritis dan pengujian karena adanya
slip antara roller dengan batang traksi
yang
bisa
dikarenakan
tidak
sempurnanya sistem mekanisnya, dan
kesalahan non teknis
(human error)
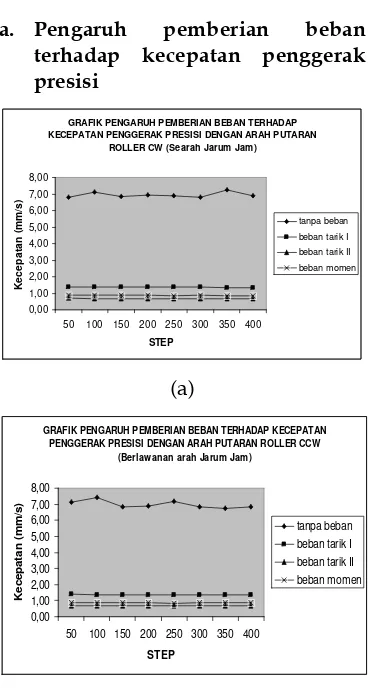
a. Pengaruh
pemberian
beban
terhadap kecepatan penggerak
presisi
GRAFIK PENGARUH PEMBERIAN BEBAN TERHADAP KECEPATAN PENGGERAK PRESISI DENGAN ARAH PUTARAN
ROLLER CW (Searah Jarum Jam)
0,00 beban tarik I beban tarik II beban momen
(a)
GRAFIK PENGARUH PEMBERIAN BEBAN TERHADAP KECEPATAN PENGGERAK PRESISI DENGAN ARAH PUTARAN ROLLER CCW
(Berlawanan arah Jarum Jam)
0,00
beban tarik I beban tarik II
beban momen
(b)
Gambar 9. Pengaruh pemberian beban
terhadap kecepatan penggerak presisi
(a) arah putaran roller cw, (b) arah
putaran roller ccw
Dari Gambar 9 terlihat pengaruh
pemberian beban terhadap kecepatan
penggerak presisi baik untuk arah
putaran roller cw maupun arah
putaran roller ccw, yaitu terlihat
kecepatan penggerak presisi berubah
menjadi lebih rendah dan semakin
mengecil seiring bertambahnya besar
beban seperti terlihat pada beban tarik
I dan bebab tarik II. Perubahan
kecepatan ini terjadi karena besar
putaran (rpm) roller yang berkurang
dan perubahan ini secara logika
berpikir
dapat
diterima,
artinya
kecepatan benda bergerak tentunya
akan semakin berkurang seiring
bertambahnya
beban.
Namun
walaupun
terjadi
pengurangan
kecepatan, tingkat ketepatan gerakan
tetap tinggi, ini artinya walaupun
terjadi
pengurangan
kecepatan,
penggerak
presisi
tetap
dapat
melakukan gerakan presisi seperti
terlihat pada hasil pengujian pada
Gambar 5 hingga Gambar 8. Dengan
kata lain, pemberian beban tidak
berpengaruh
terhadap
tingkat
ketepatan gerak penggerak presisi,
tetapi berpengaruh terhadap besar
kecepatannya saja.
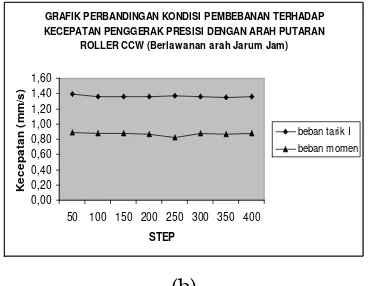
b. Pengaruh kondisi pembebanan
terhadap kecepatan penggerak
presisi
GRAFIK PERBANDINGAN KONDISI PEMBEBANAN TERHADAP KECEPATAN PENGGERAK PRESISI DENGAN ARAH
PUTARAN ROLLER CW (Searah Jarum Jam)
0,00
beban tarik I
beban momen
GRAFIK PERBANDINGAN KONDISI PEMBEBANAN TERHADAP KECEPATAN PENGGERAK PRESISI DENGAN ARAH PUTARAN
ROLLER CCW (Berlawanan arah Jarum Jam)
0,00
beban tarik I beban momen