2.1 Sucker Rod Pump
Sucker rod pump merupakan suatu pompa yang di desain khusus untuk memindahkan fluida dari dalam tanah ke permukaan. Pompa ini menggunakan piston sebagai komponen utama untuk menghisap fluida dari dalam tanah tersebut. Pompa ini biasanya digunakan pada pengeboran minyak.
Pompa angguk untuk mengangkat fluida (minyak) dengan kapasitas produksi rendah. Tergantung pada ukurannya pompa ini menghasilkan 5-40 liter fluida pada setiap langkah. Ukuran pompa juga ditentukan oleh kedalaman dan berat dari minyak yang akan dipindahkan atau dihisap. Pompa ini menggunakan mekanisme putar motor untuk menggerakkan poros pompa yang kemudian diteruskan ke gerakan translasi dan menggerakkan poros pompa kemudian menjadi gerak mengangguk. Istilah teknik untuk jenis ini adalah mekanisme berjalan balok. Itu sering digunakan dalam kelautan desain mesin uap di tahun 1700-an dan 1800-an.
2.2 Sucker Rod Pump Bukaka Tipe C228D-173-74
Gambar 2.1 Sucker Rod Pump Tipe C228D-173-74 ( Sumber : Pertamina EP Asset 1 Rantau Field )
Dalam memproduksi kan minyak dapat dilakukan dengan dua cara, yaitu : dengan cara sembur alam (natural flow) dan sembur buatan (artificial lift). Cara pertama dilakukan bila tekanan reservoir cukup tinggi, sehingga dapat mengalirkan fluida ke permukaan secara alamiah. Cara yang kedua dilakukan apabila tekanan reservoir tidak mampu lagi mengalirkan fluida kepermukaan secara alamiah.
Pumping unit tipe C228D-173-74 adalah jenis pompa sucker rod yang menggunakan metode artificial lift yang paling baik diterapkan pada sumur-sumur dangkal dan sedikit atau tidak adanya gas yang terproduksi bersama minyak. Sucker rod pump memanfaat kan sumber tenaga yang berupa listrik atau gas dari prime over untuk menggerak kan pompa sehingga fluida pada formasi dapat naik ke permukaan.
Dalam pengoperasian nya, pompa sucker rod memiliki banyak masalah yang sering timbul, diantaranya adalah tidak sesuainya laju produksi yang diinginkan dengan laju produksi sebenarnya.
Kondisi tersebut dapat disebabkan karena adanya kebocoran tubing, kebocoran standing valve maupun travelling valve, adanya plunger overtravel maupun undertravel, fluid pound, gas lock, plunger sticking, gesekan yang berlebihan dan lain sebagainya.
Dalam pendesainan pompa sucker rod, informasi mengenai static fluid level sangat penting untuk diketahui, terutama untuk mendesain setting depth pump. Untuk mengetahui static fluid level dapat menggunakan alat yang disebut sonolog, pada prinsipnya sonolog menggunakan gelombang suara untuk mengetahui level cairan didalam sumur. Data-data yang diperoleh dari sonolog dapat digunakan untuk mengevaluasi kinerja pompa dan mengoptimasikan kinerja pompa supaya didapat laju produksi yang optimum. Pompa sucker rod atau sering juga disebut beam pumping ialah salah satu metode artificial lift yang memanfaatkan gerakan naik-turun dari plunger untuk mendorong fluida reservoir ke permukaan.
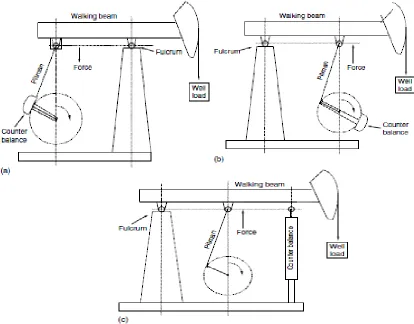
pompa sebesar 160 K in lbs, angka 173 adalah batasan beban polished rod maksimum yang diijinkan sebesar 173 ratusan pound (17.3 klb) dan angka 64 merupakan panjang langkah pompa maksimumnya 64 in, serta huruf CW merupakan arah putaran dari pompa searah jarum jam (circulation watch). Pompa sucker rod ada tiga jenis yaitu Conventional Unit, Mark II dan Air Balance.
Conventional Unit adalah jenis pompa sucker rod yang paling banyak digunakan dengan ukuran/tenaga sampai 100 HP, sedangkan Mark II digunakan untuk sumur yang dalam dengan produksi yang tinggi, dengan ukuran/tenaga sampai 125 HP. Air Balance unit adalah jenis dari pompa sucker rod yang memiliki ukuran lebih kecil dan ringan dibandingkan dengan unit lainnya, pompa sucker rod ini memiliki ukuran sampai 150 HP.
2.3 Prinsip KerjaSucker Rod Pump
Prinsip kerja sucker rod pump dapat dijelaskan sebagai berikut, Gerak utama (prime mover) akan menghasilkan gerak rotasi, selanjutnya gerak ini akan diubah menjadi gerak naik turun oleh system pitman crank assembly. Selanjutnya gerak ini akan melalui walking beam dan diteruskan ke horse head dan dijadikan gerak lurus naik turun untuk menggerakkan plunger yang berada di dalam sumur. Instalasi pumping unit di atas permukaan dihubungkan dengan instalasi pompa yang berada di dalam sumur oleh sistem sucker rod, sehingga gerak lurus naik turun dari horse head akan dipindahkan ke plunger pompa, dan plunger ini ikut bergerak naik turun dalam barrel pompa.
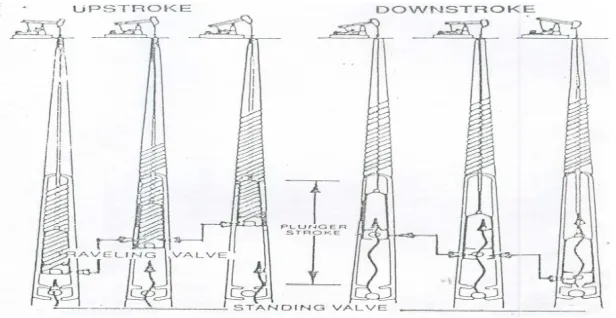
Pada saat upstroke, plunger akan bergerak ke atas (up stroke) dimana traveling valve menjauhi standing valve, sehingga menyebabkan traveling valve akan tertutup dikarenakan adanya tekanan dari fluida yang berada di atasnya, fluida tersebut dapat terangkat dan keluar melalui pipa. Pada saat plunger bergerak ke atas, tekanan di dalam barrel akan berkurang sampai dengan tekanan vacum, sehingga tekanan formasi akan membuka standing valve dan fluida akan masuk ke dalam barrel. Pada saat proses down stroke, standing valve akan tertutup karena tekanan cairan yang berada di atasnya serta pengaruh dari berat bola-bola itu sendiri, sedangkan pada traveling valve akan terbuka dan terdorong oleh cairan yang berada di dalam barrel, kemudian liquid tersebut akan masuk kedalam tubing dan terangkat karena gerakan pompa dipermukaan. Proses ini akan terus berlanjut sampai pipa terisi oleh fluida dan bergerak ke atas permukaan.
2.4 Peralatan Sucker Rod Pump Tipe C228D-173-74
Peralatan sucker rod pump dibagi menjadi dua bagian yaitu peralatan di atas permukaan dan peralatan di bawah permukaan, dapat dilihat pada gambar 2.4.
2.4.1 Peralatan di Atas Permukaan
Peralatan di atas permukaan ini memindahkan energi dari suatu prime mover ke sucker rod. Selain itu peralatan ini juga mengubah gerak berputar dari prime mover menjadi suatu gerak naik turun dan juga mengubah kecepatan prime mover menjadi langkah pemompaan yang sesuai.
a. Prime Mover
Merupakan penggerak utama, dimana prime mover akan memberikan gerakan putar yang diubah menjadi gerak naik turun pada polished rod dan sucker rod untuk diteruskan keperalatan bawah permukaan. Prime mover dapat berupa mesin gas, diesel, motor bakar dan motor listrik, yang dapat dilihat pada gambar 2.5
Prime mover ini disesuaikan dengan tersedianya sumber tenaga tersebut. Jadi pemilihan motor diusahakan mempunyai daya yang cukup untuk mengangkat fluida dan rangkaian rod dengan kecepatan yang diinginkan.
Gambar 2.5 Prime Mover
b. V-Belt
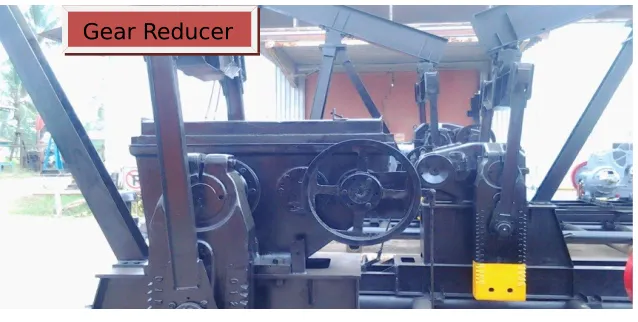
Merupakan sabuk untuk memindahkan gerak dari prime mover ke gear reducer, yang dapat dilihat pada gambar 2.6.
Gambar 2.6 V-Belt
( Sumber : Pertamina EP Asset 1 Rantau Field )
c. Gear Reducer
Gambar 2.7 Gear Reducer
( Sumber : Pertamina EP Asset 1 Rantau Field )
d. Crank
Crank merupakan sepasang tangkai yang menghubungkan crank shaft pada gear reducer dengan spitman. Pada crank ini terdapat lubang-lubang tempat pitman bearing. Besar kecil nya langkah atau stroke pemompaan yang diinginkan dapat diatur disini,dengan cara menghubungkan pitman dengan lubang yang sesuai dengan panjang langkah yang diinginkan. Apabila pitman terpasang pada lubang yang paling luar, maka panjang langkahnya adalah yang paling panjang untuk pompa tersebut,sedangkan bila pitman terpasang pada lubang paling dalam yang berarti langkahnya paling pendek, yang dapat dilihat pada gambar 2.8.
Gambar 2.8 Crank
e. Counter Weight
Counter weight adalah sepasang pemberat yang fungsinya:
- Menyimpan tenaga prime mover pada saat down-stroke atau pada saat counter weight menuju ke atas, yaitu pada saat kebutuhan tenaga kecil atau minimum.
- Membantu tenaga prime mover pada saat up-stroke (saat counter weight bergerak ke bawah) sebesar tenaga potensialnya, karena kerja prime mover yang terbesar adalah pada saat up-stroke (pompa bergerak ke atas) dimana sejumlah minyak ikut terangkat ke atas permukaan, yang dapat dilihat pada gambar 2.9.
Gambar 2.9 Counter Weight
( Sumber : Pertamina EP Asset 1 Rantau Field )
f. Pitman
Pitman adalah penghubung antara walking beam pada equalizer bearing dengan crank. Lengan pitman merubah gerakan berputar menjadi gerakan naik turun.
Gambar 2.10 Pitman Pitman
( Sumber : Pertamina EP Asset 1 Rantau Field g. Walking Beam
Walking beam merupakan balok melintang diatas menara (Sampson post) dengan mempunyai engsel ditengahnya. Pada ujung walking beam terdapat kepala kuda (horsehead) dan pada ujung yang lain nya dihubungkan dengan pitman yang fungsinya meneruskan gerakan pitman sehingga horsehead bergerak naik turun, yang dapat dilihat pada gambar 2.11
Gambar 2.11 Walking Beam
( Sumber : Pertamina EP Asset 1 Rantau Field )
h. Horse head.
Horse head meneruskan gerak cari walking beam ke unit pompa di dalam sumur melalui bridle, polished rod dan sucker string atau merupakan kepala dari walking beam yang menyerupai kepala kuda, dapat dilihat pada gambar 2.12.
Gambar 2.12 Horse Head
( Sumber : Pertamina EP Asset 1 Rantau Field )
i. Bridle
Bridle merupakan nama lain dari wireline hanger, yaitu merupakan sepasang kabel baja yang disatukan pada carrier bar. Bridle di ikat di horse head sedangkan ujung yang lain ditempati carier bar, dapat dilihat pada gambar 2.13.
Gambar 2.13 Bridle
( Sumber : Pertamina EP Asset 1 Rantau Field ) Horse
j. Carrier Bar
Carrier bar merupakan alat yang berfungsi sebagai tempat bergantung nya rangkaian rod dan polished rod, penyangga dari polished rod clamp, dapat dilihat pada gambar 2.14.
Gambar 2.14 Carrier Bar
( Sumber : Pertamina EP Asset 1 Rantau Field )
k. Polished Rod
Polished rod merupakan bagian teratas dari rangkaian rod yang muncul di permukaan. Fungsi nya adalah menghubungkan antara rangkaian rod di dalam sumur
dengan peralatan-peralatan dibawah permukaan.
Polishe drod mempunyai permukaan yang licin sehingga batang besi tersebut dinamakan polishe drod.
Berikut ini adalah gambar dari polished rod yang terdapat pada pumping unit konvensional.
Gambar 2.15 Polished Rod
( Sumber : Pertamina EP Asset 1 Rantau Field )
l. Stuffing Box
Stuffing box dipasang diatas kepala sumur (casing atau tubing head) untuk mencegah / menahan minyak agar supaya tidak keluar bersama naik turunnya
polished rod. Dengan demikian seluruh aliran minyak hasil pemompaan akan mengalirke Flowline lewat Crosstee.
m. Sampson Post
Sampson post merupakan kaki penyangga atau penopang walking beam yang menghubungkan saddle bearing yang dipasang pada walking beam dan terhubung oleh horse head untuk keseimbangan pada pumping unit, dapat dilihat pada gambar 2.16
Gambar 2.16 Sampson Post
( Sumber : Pertamina EP Asset 1 Rantau Field )
n. Saddle Bearing
Saddle bearing adalah tempat kedudukan (engsel) dari walking beam pada sampson post pada bagian atas, yang dapat dilihat pada gambar 2.17.
Gambar 2.17 Saddle Bearing Sampson
( Sumber : Pertamina EP Asset 1 Rantau Field o. Brake
Brake disini berfungsi untuk mengerem gerak pompa jika dibutuhkan, misalnya pada saat akan dilakukan reparasi sumur atau unit pompa nya sendiri. Gambar 2.18 di bawah ini menunjukkan letak brake pada gearbox mesin pumping unit konvensional tersebut, dapat dilihat pada gambar 2.20
Gambar 2.18 Brake
( Sumber : Pertamina EP Asset 1 Rantau Field )
2.4.2 Peralatan di Bawah Permukaan
( Sumber : www.google.com )
Peralatan pompa di bawah permukaan (subsurface pump equipment) dapat dilihat pada gambar 2.19. Yang terdiri dari beberapakomponen utama,yaitu:
a. Working Barrel
Working Barrel merupakan tempat dimana plunger dapat bergerak naik turun sesuai dengan langkah pemompaan dan menampung minyak terisap saat up-stroke dapat dilihat pada gambar 2.19.
b. Plunger
Plunger merupakan bagian dari pompa yang terdapat didalam barrel dan dapat bergerak naik turun yang berfungsi sebagai penghisap minyak dari lubang sumur masuk ke barrel yang kemudian diangkat ke permukaan melalui tubing, dapat dilihat pada gambar 2. 19.
c. Tubing
Seperti hal nya pada peralatan sembur alam, tubing digunakan untuk mengalirkan minyak dari dasar sumur ke permukaan setelah minyak diangkat oleh plunger pada saat up-stroke, dapat dilihat pada gambar 2. 19.
d. Standing Valve
Standing Valve merupakan bola yang terdapat dibagian paling bawah barrel pompa yang berfungsi mengalirkan fluida dari lubang sumur masuk ke working barrel dan hal ini terjadi pada saat plunger bergerak ke atas dan selanjutnya standing valve terbuka, dapat dilihat pada gambar 2. 19.
e. Travelling Valve
Travelling valve merupakan bola yang ikut bergerak naik turun menurut gerakan plunger dan berfungsi mengalirkan minyak dari working barrel masuk ke plunger dan hal ini terjadi pada saat plunger bergerak ke bawah serta menahan minyak keluar dari plunger pada saat plunger bergerak ke atas, dapat dilihat pada gambar 2. 19.
Gas Anchor merupakan komponen pompa yang dipasang di bagian bawah dari pompa yang berfungsi untuk memisahkan gas dari minyak agar gas tersebut tidak ikut masuk kedalam pompa bersama-sama dengan minyak, dapat dilihat pada gambar 2. 19.
Ada dua macam tipe Gas Anchor,yaitu: - P oo r m a n T y pe
Larutan gas dalam minyak yang masuk ke dalam anchor akan melepaskan diri dari larutan (bouyancy effect). Minyak akan masuk ke dalam barrel melalui suction pipe, sedangkan gas yang telah terpisah akan dialihkan melalui annulus. Apabila suction pipe terlalu panjang atau diameternya terlalu kecil, maka akan terjadi pressure loss yang cukup besar sehingga menyebabkan terjadinya penurunan PI (Produktivity Index) sumur pompa.
Sedangkan apabila suction pipe terlalu besarakan menyebabkan annulus antara dinding anchor dengan suction pipe menjadi lebih kecil, sehingga kecepatan aliran minyak besar dan akibatnya gas masih terbawa oleh butiran-butiran minyak. Diameter gas anchor yang terlalu besar akan menyebabkan penurunan PI sumur pompa, dapat dilihat pada gambar 2.20.
( Sumber : www.google.com -P ac k e r T y pe
Minyak masuk melalui ruang antara dinding anchordan suction pipe, kemudian minyak jatuh didalam annulus antara casing dan gas anchor dan ditahan oleh packer,selanjut nya minyak masuk ke pompa melalui suction pipe. Disini minyak yang masuk ke dalam annulus sudah terpisah dari pompa, dapat dilihat pada gambar 2.21.
Gambar 2.21 Packer Type ( Sumber : www.google.com )
g. Tangkai Pompa
Tangkai pompa terdiri dari : - Sucker rod
Gambar 2.22 Tangkai Pompa ( Sumber : www.google.com ) -S u c k e r r od
Sucker rod merupakan batang penghubung antara plunger dengan peralatan di atas permukaan. Fungsi utamanya adalah melanjutkan gerak naik turun dari horse head ke plunger. Berdasarkan konstruksi nya, maka sucker rod dibagi menjadi 2 (dua), yaitu:
a. Berujung box-pin b. Berujung pin-pin
Untuk menghubungkan antara dua buah sucker rod digunakan sucker rod coupling. Umumnya panjang satu single dari sucker rod yang sering digunakan berkisar antara 20-30 ft. Terdapat beberapa macam ukuran sucker rod, dimana ukuran-ukuran tersebut merupakan standar API.
sama diameternya, tetapi dapat dilakukan / dibuat kombinasi dari beberapa type dan ukuran rod. Sucker string yang merupakan kombinasi dari beberapa tipe dan ukuran tersebut,disebut Tappered Rod String.
-Poni Rod
Poni rod merupakan rod yang lebih pendek dari panjang rod umumnya (25feet). Fungsinya adalah untuk melengkapi panjang dari sucker rod, apabila tidak mencapai kepanjangan yang dibutuhkan ukurannya adalah: 2,4,6,8,12 feet.
-Polished Rod
Polished rod adalah tangkai rod yang berada diluar sumur yang mengubungkan sucker rod string dengan carier bar dan dapat naik turun di dalam stuffing box. Diameter stuffing box lebih besar dari pada diameter sucker rod, yaitu:1
1
8 ,1¼,1½,1¾. Panjang polished rod adalah:8,11,16,22 feet.
Gambar 2.24 merupakan jenis-jenis pompa berdasarkan klasifikasi API (American Petroleum Institut), gambar no.1 sampai no.6 pada Gambar 2.24 merupakan pompa jenis rod,sedangkan no.7 dan no.8 merupakan pompa jenis tubing.
Berikut adalah keterangan untuk jenis-jenis pompa berdasarkan klasifikasi API:
Tabel 2.1. Jenis – Jenis Pompa Menurut Standar API
Tabel 2.2. Jenis dan Ukuran Maksimum Pompa
Pump Type
Tubing Size,in
1.900 23/8 27/8 3½ Tubingone-piece,
Tubingone-piece,
Tubinglinerbarrel(TL) - 1¾ 2
¼
2¾ Rodone-piece,
Rodlinerbarrel(RL) - 1¼ 1 ¾
2¼ 2.5 Spesifikasi Sucker Rod Pump Tipe C 228D-173-74
Tabel 2.3. Spesifikasi Sucker Rod Pump Tipe C 228D-173-74 Description
PUMPING UNIT C228D-173-74
Peak torque 228.000 in-lbs
Polished rod capacity 17.300 lbs
Stroke length 74”, 62”, 52”
Walking beam SPM range 6-14 SPM
Wire hanger 1 x 9 CTRS
Double reduction gears LUFKIN (helical Gears) Pumping unit manufacture BUKAKA
Power Max. 32 HP
Speed Min. 300 RPM
Cooling system Radiator water cooling system
Prime mover Gas engine
Pulley engine to run 6-14 SPM Gas engine manufacture ARROW C-106
Start/stop switch
Engine oil cooler
Alternator electric starting
Dry type air cleaner
Carburator for natural gas
2.6 Kriteria Penggunaan Sucker Rod Pump Tipe C 228D-173-74
1. Kedalaman sumur produksi berkisar antara : 300 – 1200 m 2. Kedalaman sumur rata-rata : 800 m.
3. Tidak dapat digunakan untuk sumur directional (sumur bengkok). 4. Kemampuan pumping unit dalam mengatasi masalah :
Pasir : sedang
2.7 Pengertian Perawatan (Maintenance)
Assauri (1980:124) maintenance merupakan kegiatan untuk memelihara atau menjaga fasilitas atau peralatan pabrik dengan mengadakan perbaikan atau penyesuaian atau penggantian yang diperlukan supaya tercipta suatu keadaaan operasional produksi yang memuaskan sesuai dengan apa yang telah direncanakan.
Kegiatan perawatan dalam dunia industri merupakan kegiatan yang sangat penting, karena dengan tidak adanya perawatan yang baik suatu industri dapat dipastikan bahwa akan timbulnya kemacetan atau kerusakan dan bahkan akan menyebabkan terhentinya suatu proses produksi.
2.7.1 Jenis-Jenis Perawatan
Assuari (2004 : 96) kegiatan perawatan yang dilakukan dalam suatu perusahaan dapat dibagi menjadi beberapa jenis, diantaranya:
Penentuan tingkat perawatan pada dasarnya berpedoman pada lingkup atau bobot pekerjaan yang meliputi kerumitan, macam dukungan serta serta waktu yang diperlukan untuk pelaksanaannya. Tiga tingkatan dalam sistem perawatan, yaitu:
a) Perawatan Tingkat Ringan
Bersifat preventive, yaitu kegiatan pemeliharaan dan perawatan yang dilaksanakan untuk mencegah timbulnya kerusakan-kerusakan yang tidak terduga dan menemukan kondisi atau keadaan yang dapat menyebabkan fasilitas produksi mengalami kerusakan pada waktu digunakan dalam proses produksi.
b) Tingkat Perawatan Sedang
Bersifat corrective, dimaksudkan adalah kegiatan pemeliharaan dan perawatan yang dilakukan setelah terjadinya suatu kerusakan atau kelainan pada fasilitas dalam peralatan sehingga tidak berfungsi dengan baik.
c) Perawatan Tingkat Berat
b. Perawatan Tidak Terjadwal (Unschedule Maintenance). Perawatan yang hanya dilakukan bila terjadi kerusakan pada mesin saat beroperasi, jika tidak terjadi kerusakan maka perawatan tidak dilakukan.
3) Berdasarkan Dukungan Dananya
a. Terprogram (Planned Maintenance). Perawatan yang telah memiliki program tersendiri, maka dari itu perawatan ini memiliki teknisi, peralatan dan anggaran tersendiri untuk melakukan perbaikan.
b. Tidak Terprogram (Unplanned Maintenance). Tidak memiliki anggaran tersendiri untuk melakukan perawatan terhadap mesin atau sistem yang mengalami kerusakan, maka biaya yang dikeluarkan berasal dari anggaran biaya tak terduga.
4) Berdasarkan Tempat Pelaksanaan Perawatan
Untuk melaksanakan kegiatan perawatan diperlukan adanya suatu tempat perawatan yang disesuaikan dengan macam atau beban kerja yang dihadapi yang dilengkapi dengan peralatan-peralatan yang memenuhi persyaratan tertentu, berharga mahal, sehingga benda yang digunakannya perlu dilakukan secara efektif dan efesien. Oleh karena itu untuk mencegah terjadinya duplikasi kemampuan, maka peralatan disertalisasikan penempatannya di unit-unit perawatan.
Jenis-jenis kebijakan perawtan dibagi menjadi dua jenis, yaitu: perawatan pencegahan (preventive maintenance) dan perawatan perbaikan (corrective maintenance).
1. Perawatan Pencegahan (Preventive Maintenance)
Preventive maintenance merupakan perawatan yang dilakukan secara terjadwal, umumnya secara periodik, dimana seperangkat tugas pemeliharaan seperti inspeksi dan perbaikan, penggantian, pembersihan, pelumasan, penyesuaian dan penyamaan dilakukan. Perawatan ini bertujuan untuk mencegah kerusakan, menemukan penyebab kerusakan atau berkurangnya tingkat keandalan peralatan dan menemukan penyebab kerusakan atau berkurangnya tingkat keandalan peralatan dan menemukan kerusakan tersembunyi. Preventive maintenance terbagi menjadi empat kategori tugas, yaitu sebagai berikut:
a) Time Directed Maintenance
Time Directed Maintenance merupakan kegiatan perawatan yang dilakukan berdasarkan variable waktu. Kebijakan perawatan lain yang sesuai untuk diterapkan pada kegiatan ini adalah periodic maintenance dan on condition maintenance.
Periodic maintenance (hard time maintenance) merupakan kegiatan perawatan yang dilakukan secara periodik atau terjadwal. Kegiatan yang dilakukan adalah penggantian komponen secara terjadwal dengan interval waktu tertentu. Factor yang mempengaruhi periodic maintenance:
a. Faktor ekonomi
lebih besar bila komponen atau unit tersebut mengalami kerusakan apabila terjadi kelalaian.
b. Faktor keamanan
Kebijakan penggantian tidak lagi berdasarkan nilai rupiah, tetapi di hadapkan pada keadaan apabila tidak dilakukan, maka nyawa manusia menjadi taruhannya karena berhubungan erat dengan keamanan dan keselamatan manusia.
On condition maintenance merupakan perawatan yang dilakukan berdasarkan kebijakan operator perawatan.kegiatan yang dilakukan pada kondisi ini adalah cleaning, inspection dan lubrication.
b) Condition Basel Maintenance
Condition Basel Maintenance merupakan perawatan pencegahan yang dilakukan sesuai dengan kondisi yang berlangsung dimana variable waktu tidak diketahui secara tepat. Kebijakan yang sesuai dengan keadaan tersebut adalah predictive maintenance.
Predictive maintenance merupakan suatu kegiatan perawatan yang dilakukan dengan memeriksa dan memelihara pada saat perawatan sudah benar-benar memerlukan pemulihan ke tingkat semula.
c) Failure Finding
Failure finding merupakan suatu tindakan pencegahan yang dilakukan dengan cara memeriksa fungsi yang tersembunyi (hidden function) secara periodik untuk memastikan kapan suatu komponen akan mengalami kerusakan.
Kegiatan ini disebut juga no schedule maintenance dimana kegiatan perawatan ini tidak melakukan usaha untuk mengantisipasi kerusakan. Suatu peralatan atau mesin dibiarkan bekerja hingga mengalami kerusakan kemudian dilakukan perawatan perbaikan. Kegiatan ini dilakukan jika tidak ada kegiatan pencegahan efektif yang dapat dilakukan, tindakan pencegahan terlalu mahal atau dampak gagal tidak berpengaruh.
2. Perawatan Perbaikan (Corrective Maintenance)
Kegiatan perbaikan adalah kegiatan perawatan yang dilakukan setelah terjadinya kerusakan (failure) atau sistem tidak dapat berfungsi dengan baik. Hal ini bukan berarti bahwa aktivitasnya tidak dapat diramalkan, karena pada kenyataannya metode untuk mengembalikan fungsi peralatan (recovery) dari failure dapat dikembangkan. Tidakan yang dapat diambil adalah berupa penggantian komponen (corrective replacement), perbaikan kecil (repair) dan perbaikan besar (overhaul). Kegiatan pemeliharaan ini merupakan perbaikan yang dilakukan setelah mesin atau sistem mengalami kerusakan atau tidak dapat berfungsi dengan baik. Perawatan perbaikan ini lebih cenderung suatu tindakan yang tidak terjadwal.
Setelah mengetahui pengertian-pengertian perawatan di atas maka dari itu penulis akan memilih jenis perawatan pencegahan (Preventive maintenance) serta perawatan korektif (Corrective maintenance). Karena dengan perawatan pencegahan kita dapat mencegah kerusakan yang fatal dari sistem undercarriage excavator yang akan menghentikan suatu pekerjaan proyek, sedangkan perawatan korektif disini adalah untuk menggantikan komponen-komponen yang sudah selayaknya di gantikan.
Assauri (1980) bahwa pelaksanaan perawatan perlu ditentukan frekuensinya menurut keperluan setiap peralatan, agar suatu fasilitas dapat dipergunakan dengan terus menerus dan tidak akan mengganggu proses produksi. Frekuensi pengerjaan perawatan dapat di tentukan berdasarkan skala waktu operasional, misalnya:
a. Harian b. Mingguan c. Bulanan
Perawatan terjadwal merupakan bagian dari perwatan pencegahan. Perawatan ini bertujuan mencegah terjadi kerusakan dan perawatannya dilakukan secara periodik dalarn rentang waktu tertentu. Strategi perawatan ini disebut juga sebagai perawatan berdasarkan waktu (time based maintenance) (Sudrajat. 2011).
Kebijakan perawatan ini cukup baik dalam mencegah terhentinya mesin yang tidak direncanakan. Rentang waktu perawatan ditentukan berdasarkan pengalaman, data masa lalu atau rekomendasi dari pabrik pembuat mesin yang bersangkutan. Kekurangannya jika rentang waktu perawatan terlalu pendek akan mengganggu aktivitas produksi dan dapat meningkatkan kesalahan yang timbul karena kekurang cermatan teknisi dalam mernasang kembali komponen yang diperbaiki serta kemungkinin adanya kontaminan yang masuk kedalani sistem. Jika rentang wakru perawatan terlalu panjang kemungkinan mesin akan mengalami kerusakan sebelurn tiba waktu perawatan. Selain itu jika kondisi mesin atau komponen mesin/peralatan masih baik dan menurut jadwal harus sudah diganti atau diperbaiki. Penjadwalan perawatan harus dilakukan berdasarkan interval yang sesuai dengan objek perawatan.