DESAIN SISTEM INSTRUMENTASI
JAKET AIRBAG BERBASIS MIKROKONTROLER ATMEGA8535 DENGAN ACCELEROMETER DAN GYROSCOPE
Disusun oleh Kelompok 2 :
Guntur Dwi Cahya 125090800111012 Annisa Nilamsari
Siti Miranti P
Hutomo Pebrianditya
Muhammad Ihsanuddin
JURUSAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
BAB I PENDAHULUAN
1.1 Latar Belakang
Pada zaman transportasi modern ini banyak terjadi kecelakaan lalu lintas yang mengakibatkan banyak kerugian termasuk kematian. Maka semakin banyaknya kecelakaan yang terjadi, banyak juga yang menciptakan alat-alat canggih untuk keamanan saat berkendara dan meminimalisir efek yang mungkin terjadi saat kecelakaan. Pada mobil yang canggih dan modern terdapat alat safety yaitu airbag yang mengamankan pengendara saat terjadi kecelakaan. Hal ini yang memunculkan ide pembuatan airbag jacket untuk pengendara sepeda motor. Airbag pada mobil di inovasikan menjadi jaket sehingga mudah di gunakan untuk pengendara motor.
Airbag mobil mempunyai komponen yang besar dan mempunyai system yang berfungsi sebagai penanggulangan setelah terjadi kecelakaan. Pada saat mobil menabrak maka, airbag akan mengembang. System ini juga salah satu alasan yang di gunakan dalam pembuatan ide jacket airbag. Jika airbag pada mobil menggunakan system hanya untuk penanggulangan saat terjadi kecelakaan maka system ini akan di kembangkan yaitu sebagai pengaman sebelum terjadi kecelakaan.
Selain itu sensor yang di gunakan pada airbag mobil sangat berbeda dengan sensor yang ada pada jacket airbag ini. Pada jacket airbag ini menggunakan fungsi gyroscope dan
accelerometer. Jadi pada desain ini fungsi gyroscope digunakan untuk menentukan kemiringan dan accelerometer di gunakan untuk menentukan percepatan. Sehingga dengan kemiringan dan kecepatan tertentu jacket ini akan akan mengembang dan mengamankan sebelum terjadinya tabrakan.
Desain pada system ini berbasis mikrokotroler ATMEGA8535 penggunaan mikrokontroler ini sebenarnya mempunyai prinsip kerja yang sama dengan mikrokontroler yang lain hanya saja pada mikrokontroler ATMEGA8535 mempunyai system yang lebih ringkas karena hanya mempunyai memori flash sebesar 8 (delapan) bite yang di gunakan untuk mengatur airbag supaya mengembang sesuai perintah yang telah di set.
Berdasarkan latar belakang diatas maka penulis menetapkan rumusan masalah yaitu: a. Bagaimana sistem kerja sensor accelerometer dan gyroscope?
b. Bagaimana kinerja sistem jaket airbag berbasis ATMEGA8535 dengan sensor IMU?
1.2 Pembatasan Masalah
Dalam penelitian ini akan digunakan beberapa batasan masalah untuk mempermudah proses penelitian yakni:
a. Pintu bergerak dua arah berlawanan secara horisontal.
b. Sensor PIR yang digunakan sebagai pendeteksi panjang gelombang infra red pada tubuh manusia.
c. Bahasa pemrograman yang digunakan untuk memprogram mikrokontroler adalah bahasa C.
d. Tidak dibahas mengenai pengaruh deteksi gerak hewan.
1.3 Tujuan Penelitian
Tujuan penelitian ini adalah:
a. Membuat sistem instrumentasi pintu otomatis dua arah menggunakan sensor PIR KC7783R.
b. Mengetahui kinerja sistem untuk menggerakan pintu secara otomatis.
1.4 Manfaat Penelitian
Adapun manfaat yang diperoleh dari penelitian ini adalah:
a. Dapat dimanfaatkan sebagai referensi untuk pengembangan dalam aplikasi sistem buka tutup otomatis pada pintu yang sebenarnya.
BAB II DASAR TEORI
2.1 Mikrokontroler ATmega8535
Mikrokontroler ATmega8535 adalah pusat kendali dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Adapun nilai plus bagi mikrokontroler ini adalah terdapatnya memori dan port I/O dalam suatu kemasan IC yang kompak, fitur yang lengkap seperti ADC internal, EEPROM internal, port I/O, komunikasi serial. Juga harga yang terjangkau memungkinkan mikrokontroler digunakan pada berbagai sistem elektronis, seperti pada robot, automasi industri, sistem alarm, peralatan telekomunikasi, hingga sistem keamanan (Wardhana, 2006).
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16 bit dan sebagian besar instruksi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Hal ini terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing). Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx (Wardhana, 2006). Bentuk fisik mikrokontroler ATmega8535 dapat dilihat pada Gambar 2.1.
Gambar 2.1 Bentuk Fisik Mikrokontroler ATmega8535 (Meriwardana, 2010).
2.1.1 Arsitektur AVR ATmega8535
c. Tiga buah timer / counter. d. 32 register.
e. Watchdog Timer dengan oscilator internal. f. SRAM sebanyak 512 byte.
g. Memori Flash sebesar 8 kb.
h. Sumber Interrupt internal dan eksternal. i. Port SPI (Serial Pheriperal Interface). j. EEPROM on board sebanyak 512 byte. k. Komparator analog.
l. Port USART untuk komunikasi serial.
2.1.2 Fitur AVR ATmega8535
Mikrokontroler ATmega8535 memiliki fitur sebagai berikut:
a. Sistem processor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
b. Ukuran memory flash 8KB, SRAMsebesar 512 byte, EEPROM sebesar 512 byte. c. ADC internal dengan resolusi 10 bit sebanyak 8 channel.
d. Port komunikasi serial USART dengan kecepatan maksimal 2.5 Mbps. e. Mode Sleep untuk penghematan penggunaan daya listrik.
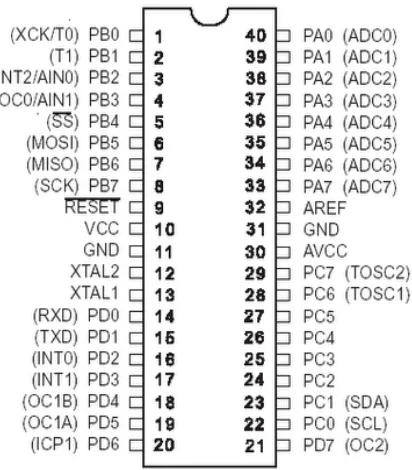
2.1.3 Konfigurasi pin ATmega 8535
Mikrokontroler ATmega8535 mempunyai jumlah pin sebanyak 40 buah, dimana dengan susunan 32 pin dipergunakan untuk keperluan port I/O yang dapat menjadi pin
supply tegangan, reset serta tegangan referensi untuk ADC. Susunan pin-pin pada mikrokontroler ATmega8535 diperlihatkan pada Gambar 2.2.
Gambar 2.2 Konfigurasi Pin ATmega8535 (Meriwardana, 2010).
Secara fungsional, konfigurasi pin ATmega8535 sebagai berikut: a. VCC merupakan Pin yang berfungsi sebagai pin masukan catudaya. b. GND merupakan Pin Ground .
c. Port A (PA0...PA7).
Port A berfungsi sebagai input analog pada A/D Konverter. Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah, jika A/D Konverter tidak digunakan. Pin-pin port dapat menyediakan resistor internal pull-up (yang dipilih untuk masing-masing bit). Port A
output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Ketika pin PA0 ke PA7 digunakan sebagai input dan secara
eksternal ditarik rendah, pin-pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan. Pin port A adalah tri-stated manakala suatu kondisi reset menjadi aktif sekalipun waktu habis.
d. Port B (PB0...PB7).
secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pin Port B adalah tri-stated manakala suatu kondisi reset menjadi aktif sekalipun waktu habis. e. Port C (PC0...PC7).
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Port C output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin port C yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pin port C adalah tri-stated manakala suatu kondisi reset menjadi aktif sekalipun waktu habis. f. Port D (PD0...PD1).
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Port D output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin port D yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pin port D adalah tri-stated manakala suatu kondisi reset menjadi aktif sekalipun waktu habis. g. RESET (Reset Input)
Merupakan pin yang digunakan untuk mereset mikrokontroler. Sebuah reset terjadi jika pin ini diberi logika rendah melebihi periode minimum yang diperlukan.
h. XTAL1 (Input Oscillator).
Masukan ke inverting oscillator amplifier dan masukan ke rangkaian clock internal.
i. XTAL2 (Output Oscillator).
Keluaran dari inverting oscillator amplifier.
j. AVCC
Merupakan pin penyedia tegangan untuk port A dan A/D converter catu daya dari port A dan ADC.
k. AREF
Merupakan pin referensi analog untuk A/D converter.
2.1.4 Peta memori ATmega8535
ATmega8535 memiliki dua jenis memori yaitu memori data dan memori program ditambah dengan satu fitur tambahan yaitu EEPROM memory untuk penyimpanan.
ATmega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu : 32 buah register umum, 64 buah register I.O, dan 512 byte SRAM internal. Register untuk keperluan umum menempati space
data pada alamat terbawah yaitu $00 sampai $1F. Sementara itu register khusus untuk menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 sampai $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register,
timer/counter, fungsi I/O, dan sebagainya. Register khusus alamat memori secara lengkap dapat dilihat pada tabel dibawah. Alamat memori berikutnya digunakan untuk SRAM 512
byte, yaitu pada lokasi $60 sampai dengan $25F (Meriwardana, 2010). Memori data ATmega8535 dapat dilihat pada Gambar 2.3.
Gambar 2.3 Peta Memori Data ATmega8535 (Meriwardana, 2010).
Memori Program ATmega8535.
Memori program yang terletak pada Flash Perom tersusun dalam word atau 2 byte
Gambar 2.4 Peta Memori Program ATmega8535 (Meriwardana, 2010).
EEPROM Data Memory.
ATmega8535 memiliki EEPROM sebesar 512 byte untuk penyimpanan data. Lokasinya terpisah dengan sistem addres register, data register dan kontrol register yang dibuat khusus untuk EEPROM.
2.1.5 Sistem minimum mikrokontroler ATmega8535
Gambar 2.5 Sistem Minimum Mikrokontroler ATmega8535 (Alihasyim, 2011).
Untuk membuat rangkaian minimum ATmega8535 diperlukan beberapa komponen yaitu:
• IC mikrokontroler ATmega8535
• 1 XTAL 4 MHz atau 8 MHz atau 11.0592 MHz (XTAL1)
• 3 kapasitor kertas yaitu dua 22 pF (C2 dan C3) serta 100 nF (C4)
• 1 kapasitor elektrolit 4.7 µF (C12) 2 resistor yaitu 100 Ω (R1) dan10 KΩ (R3). • 1 tombol reset pushbutton (PB1).
Selain itu tentunya diperlukan power suply yang bisa memberikan tegangan 5V DC. Rangkaian sistem minimum ini sudah siap untuk menerima sinyal analog (fasilitas ADC) di port A (Arifin, 2011).
2.2 Sensor Accelerometer MMA7260Q
Accelerometer adalah alat yang digunakan untuk mengukur percepatan, mendeteksi dan mengukur getaran (vibrasi), dan mengukur percepatan akibat gravitasi (inklinasi). Accelerometer dapat digunakan untuk mengukur getaran pada mobil, mesin, bangunan, dan instalasi pengamanan. Accelerometer juga dapat diaplikasikan pada pengukuran aktivitas gempa bumi dan peralatan-peralatan elektronik, seperti permainan 3 dimensi, mouse komputer, dan telepon. Untuk aplikasi yang lebih lanjut, sensor ini banyak digunakan untuk keperluan navigasi.
Namun jika kecepatan semakin berkurang daripada kecepatan sebelumnya, disebut perlambatan (deceleration). Percepatan juga bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula. Untuk memperoleh data jarak dari sensor accelerometer, diperlukan proses integral ganda terhadap keluaran sensor.
Proses penghitungan ini dipengaruhi oleh waktu cuplik data, sehingga jeda waktu cuplik data (dt) harus selalu konstan dan dibuat sekecil mungkin . Secara sederhana, integral merupakan luas daerah di bawah suatu sinyal selama rentang waktu tertentu. Untuk lebih jelasnya dapat dilihat pada Gambar 1.
Persamaan pengintegralan pada persamaan (2) masih memiliki error yang cukup besar. Untuk lebih mengoptimalkan hasil pengintegralan maka dapat digunakan metode Runge-Kutta dengan pendekatan trapezoidal seperti pada persamaan (4).
hasil pengukuran accelerometer pada kenyataannya bukanlah data percepatan benda murni, melainkan juga terdapat derau.
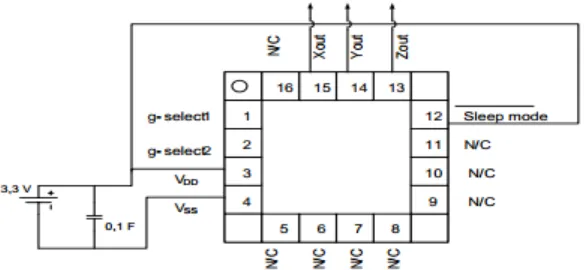
Nilai a merupakan percepatan benda sesungguhnya, nilai r adalah random noise, dan d adalah drift noise.Pada penelitian ini digunakan sensor accelerometer MMA7260Q dengan tiga sumbu pengukuran, yaitu terhadap sumbu x, sumbu y, dan sumbu z. Sensor accelerometer ini digunakan untuk mengukur percepatan benda dalam satuan gravitasi (g). Sensor ini dapat mengukur percepatan dari 1,5 g sampai 6 g. Sensor accelerometer MMA7260Q dengan rangkaian pendukung yang terintegrasi dapat dilihat pada Gambar 2.
Pada sensor accelerometer MMA7260Q ini memiliki fasilitas g-select yang memungkinkan sensor bekerja pada tingkat sensitivitas yang berbeda-beda. Penguatan internal pada sensor akan berubah sesuai dengan tingkat sensitivitas yang dipilih, yaitu 1,5 g, 2 g, 4 g, atau 6 g. Pemilihan tingkat sensitivitas ini dilakukan dengan memberikan input logika pada pin g-select1 dan g-select2. Diskripsi pemilihan tingkat sensitivitas pada sensor accelerometer MMA7260Q dapat diamati pada Tabel 1.
setengah dari tegangan masukan sensor (Vdd). Tegangan offset accelerometer dipengaruhi oleh orientasi
sensor dan percepatan statis tiap sumbu akibat gaya gravitasi bumi. Untuk percepatan positif maka sinyal keluaran akan meningkat di atas tegangan offset, sedangkan untuk percepatan negatif sinyal keluaran akan semakin menurun di bawah tegangan offset.
Sensor accelerometer beroperasi pada tegangan 2,2 – 3,6 volt dengan tegangan tipikal 3,3volt (Vdd). Keluaran sensor accelerometer berupa tegangan analog yang merepresentasikan data percepatan dalam satuan gravitasi (g). Sensor accelerometer MMA7260Q memiliki tingkat sensitivitas yang dapat dipilih yaitu 1,5g/ 2g/ 4g/6g. Tingkat sensitivitas dapat dipilih dengan melakukan pengesetan pada pin g-select1 dan g-select2. Koneksi masukan dan keluaran pin-pin pada accelerometer MMA7260Q dapat dilihat pada Gambar 2.
Gambar 2 Konfigurasi pin-pin accelerometer MMA7260Q
(6)
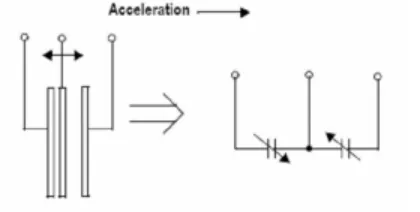
Pada intinya, accelerometer MMA7260Q ini bekerja menggunakan prinsip konversi kapasitansi (C) ke tegangan. Alat ini terdiri dari dua permukaan sel mesin mikro yang bersifat kapasitif atau disebut juga g-cell. Struktur mekanik g-cell terbuat dari bahan semikonduktor (polysilicon) dan dapat dimodelkan sebagai sepasang sinar yang terpancarkan pada suatu benda yang bergerak diantara dua sumber sinar tetap. Benda tersebut akan bergerak katika ada percepatan. Karena sinar terpancarkan pada benda yang bergerak tadi, maka jarak antara benda dengan sumber sinar tetap pada 1 sisi akan bertambah sejumlah berkurangnya jarak pada sisi yang lain. Hal ini menyebabkan berubahnya nilai masing-masing kapasitor yang dapat dirumuskan pada persamaan (7).
(7)
A adalah luas bidang yang dipancari sinar, ε merupakan konstanta dielektrik, dan D adalah jarak antara sinar tetap dengan benda yang bergerak. Gambaran sederhana model transduser g-cell dapat dilihat pada Gambar 3.
Gambar 3 Model sederhana tranducer g-cell
2.3 Sensor Gyroscope LISY300
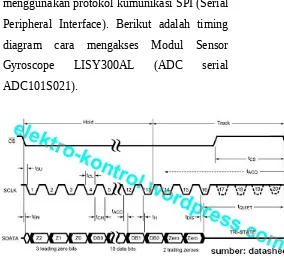
Sensor gyroscope yang saya gunakan ini adalah sebuah modul yang terdiri dari sensor Gyroscope LISY300AL dan ADC serial ADC101S021 yang dikeluarkan oleh PARALLAX Inc. Pada modul ini pun telah dilengkapi dengan regulator tegangan 3.3 V sebagai supply nya. Modul Sensor Gyroscope LISY300AL dapat mendeteksi kecepatan sudut (angular rate) satu axis, yaitu sumbu Z (yaw). Dan mampu membaca sampai ± 300°/s full scale.
menggunakan protokol kumunikasi SPI (Serial Peripheral Interface). Berikut adalah timing diagram cara mengakses Modul Sensor Gyroscope LISY300AL (ADC serial ADC101S021).
Protokol Komunikasi
Pada dasarnya untuk dapat mengakses Modul Sensor Gyroscope LISY300AL ini, sebenarnya kita hanya harus tau cara mengakses ADC serial ADC101S021, dikarenakan Sensor Gyroscope itu sendiri dibaca oleh ADC serial ADC101S021. Dari gambar diatas terlihat bahwa terdapat 3 jalur untuk mengakses ADC serial ADC101S021 yaitu CS, SCLK dan SDATA.
CS digunakan untuk meng-enable ADC serial ADC101S021 agar dapat diakses, harus beri logika LOW.
SCLK digunakan sebagai serial clock, dimana semua aplikasi yang berkomunikasi secara serial membutuhkan clock untuk mengaksesnya, maksimal kecepatan clock untuk mengakses ADC serial ADC101S021 adalah 4MHz.
Sedangkan SDATA adalah jalur data serial yang berasal dari ADC serial ADC101S021. Data yang berasal dari ADC serial ADC101S021 mempunyai 15 bit data. Yaitu 3 bit 0 (LOW) awal, 10 bit data ADC dan 2 bit 0 (LOW) akhir. Dimana 10 bit data ADC dimulai dari MSB dan diakhiri oleh LSB.
Dan sensor Gyroscope LISY300AL, mempunyai sensitivitas 3.3 mV/°/s. Dimana ADC serial ADC101S021 mempunyai pembacaan data 10 bit (0-1023 atau sebanyak 1024 step) dengan perkiraan 3.22 mV/step. Sehingga setiap perubahan setiap step adalah perubahan 1 derajat.
Zero Rate Level
Sebenarnya sensor Gyroscope LISY300AL sudah terkalibrasi dari pabriknya. Yaitu dengan supply tegangan 3.3 V akan menghasilkan zero rate level 1.65 V (tegangan offset atau Voffset). Nilai zero rate level ini terjadi ketika Gyroscope tidak melakukan kecepatan sudut (angular rate), atau sensor Gyroscope dalam keadaan diam. Atau dengan kata lain jika dibaca menggunakan ADC 10 bit, dengan range input ADC 0-3.3 V, maka didapat nilai ADC sebesar 512 untuk zero rate level (tidak terjadi percepatan sudut atau dalam keadaan diam). Jika sumbu Z bergerak searah jarum jam, maka nilai ADC akan berkurang (dibawah nilai zero rate levelnya), Jika bergerak berlawanan arah jarum jam maka nilai ADC akan bertambah (diatas zero rate levelnya).
Tetapi menurut datasheet Gyroscope LISY300AL:
“Zero-rate level describes the actual output signal if there is no angular rate present. For a 3.3 V powered sensor the absolute zero-rate output is ideally 1.65 V. Zero-rate level of precise MEMS sensors is, to some extent, a result of stress to the sensor and therefore zero-rate level can slightly change after mounting the sensor onto a printed circuit board or after exposing it to extensive mechanical stress. This value changes very little over temperature and also very little over time.”
Kalibrasi
Karena alasan diatas, maka terjadi penyimpangan untuk nilai zero rate levelnya, yaitu maksimal sekitar 512±24. Oleh karena itu harus dilakukan cara untuk dapat menentukan nilai zero rate level melalui kalibrasi.
muncul nilai 511, 509, 504, 513 (berubah-ubah). Dari data tersebut bisa saja saya mengambil kesimpulan jika nilai zero rate levelnya adalah 507 (nilai tengahnya).
Sensor gyroscope bersifar dinamis, dimana sensor gyroscope mempunyai nilai saat terjadi kecepatan sudut (angular rate). Sedangkan saat diam (tidak terjadi angular rate) maka nilainya adalah sama dengan zero rate level. Lalu nilainya yang berubah-ubah dikarenakan gyroscope mempunyai efek drift saat kondisi diam (nilainya tidak cenderung kembali ke nilai zero rate level). Hal ini adalah kebalikan dari sensor accelerometer, dimana sensor accelerometer bersifat statis. Oleh karena itu mengapa pada banyak aplikasi selalu menggabungkan dua buah sensor tersebut (gyroscope dan accelerometer).
Berikut ini adalah cara melakukan kalibrasinya. Cara ini saya dapat dari program demo yang diberikan oleh PARALLAX Inc.
center (saya gunakan untuk mengganti istilah zero rate level)
data_gyro (hasil pembacaan ADC dari gyroscope melalui komunikasi SPI) center(n)=(center(n-1)+data_gyro(n))/ banyaknya n
Dimana: n = sampling
center(n-1) = 0 (bernilai nol pada awalnya)
Semakin banyak n (sampling) maka semakin baik untuk mendapatkan nilai zero rate levelnya. Kalibrasi ini dilakukan hanya 1 kali pada awal program saja.
Mengakses Adc Serial Adc101s021 Atau Spi
Untuk mengakses ADC serial ini menggunakan protokol komunikasi SPI dan saya menggunakan bahasa C dengan compiler CodeVision AVR untuk memprogramnya. Pada dasarnya compiler CodeVision AVR telah mempunyai library bawaan untuk mengakses SPI, tapi sayangnya library tersebut hanya untuk mengakses 8 bit data saja (aplikasi ini datanya 15 bit). Oleh karena itu saya membuat sebuah fungsi sendiri untuk mengaksesnya.
Filter digital adalah semua filter elektronik yang bekerja dengan menerapkan operasi matematika digital atau algoritma pada suatu pemrosesan sinyal. Salah satu batasan utama pada filter digital adalah dalam hal keterbatasan kecepatan pemrosesan/waktu komputasi yang sangat tergantung dengan kemampuan mikrokontroler atau komputer yang digunakan.
2.4.1 Filter Eksponensial
Filter eksponensial merupakan filter linier rekursif sederhana. Filter eksponensial secara umum digunakan dalam analisis kawasan waktu. Persamaan filter eksponensial orde 2 dapat dilihat pada Persamaan (8).
(8)
Secara umum parameter a dapat ditentukan dengan persamaan (9).
(9)
Di sini fc adalah frekuensi cut off dan fs adalah frekuensi sampling.
2.4.2 Filter Kalman
Filter Kalman merupakan salah satu solusi optimal dalam memfilter data dari sinyal pada suatu proses yang linier. Filter Kalman digunakan pada proses yang dapat dinyatakan dalam bentuk persamaan state linier seperti pada persamaan (10).
(10)
Persamaan 10 dapat diobservasi dengan model pengukuran yang memetakan state x ke keluaran y seperti dituliskan pada persamaan (11)
(11)
Noise proses (w) dan noise pengukuran (v) merupakan noise yang saling bebas. Nilai estimasi state ^x k pada filter Kalman ditentukan dari estimasi posteriori ^xk´
(12)
Selisih nilai antara pengukuran sebenarnya yk dan estimasi pengukuran disebut sebagai residual atau pengukuran innovation. Jika nilai residual adalah nol, maka hal itu
menunjukkan bahwa hasil estimasi sama dengan hasil pengukuran. Nilai Kk adalah faktor gain pada filter Kalman.Pada filter Kalman dipilih nilai Kk sehingga estimasi posteriori adalah optimal atau mempunyai error yang minimum. Nilai Pk minimum diperoleh jika nilai Kk dapat menyediakan estimasi yang mempunyai covariance minimum. Penyelesaian untuk mendapatkan Pk minimum ditunjukkan pada persamaan (13)
(13)
Nilai estimasi priori diberikan pada persamaan (14) yang diperoleh dengan menghilangkan noise wk.
(14)
Nilai covariance dari error diberikan pada persamaan (15).
(15)
2.5 Inflator dan Airbag
Dahulu banyak model yang dipakai seperti tipe compressed air dan
Pyrotechnic, namun
sekarang yang banyak dipakai adalah Pyrotechnic Inflator karena sudah terbukti baik, kuat dan mudah pemasangannya. Dilihat dari struktur bagian dalamnya, ketika arus mengalir di dalam Initiator kelima, dengan kata lain pada saat arus tertentu disuplai dari ACU, maka Initiator pertama akan membuat ledakan kecil, kemudian menyalakan Auto Ignition Charge kedua . Panas penyepian akan
mengaktifkan Gas Generator keenam,untuk mengasilkan gas secara cepat. Pada saat tersebut terjadinya panas sangat cepat, sehingga mengeluarkan debu. Karena itulah, panas dari gas ini lebih rendah dan debunya dibuang lewat melalui Filter keempat. Gas ini lah yang mengisi kantongudara agar mengelembung. Komposisi utama gas ini adalah He.N2,CO2,Ar. Pemberian arus ke sirkuit untuk inflator akan diberikan dengan urutan pengembangan kantong udara sebagai berikut (tergantung dari keputusan pengembangan yang telah putuskan sebelumya).
100dB. Ketika kantong udara untuk pengemudi dan penumpang meletus pada saatyang mikrokontroler. Dalam melakukan pemrograman mikrokontroler diperlukan suatu software
pemrograman, salah satunya yang mendukung bahasa C adalah Code Vision AVR (CVAVR). CVAVR hanya dapat digunakan pada mikrokontroler keluarga AVR. CVAVR selain dapat digunakan sebagai software pemograman juga dapat digunakan sebagai softwaredownloader.
Software downloader akan men-download fileberekstensi “hex” ke mikrokontroler (Averroes, 2009).
Adapun beberapa kelebihan bahasa C yakni:
Bahasa C tersedia hampir di semua jenis komputer.
Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis komputer.
Bahasa C hanya menyediakan sedikit kata-kata kunci, hanya terdapat 32 kata kunci.
Proses executable program bahasa C lebih cepat.
Dukungan pustaka yang banyak.
Bahasa C adalah bahasa yang terstruktur.
Bahasa C termasuk bahasa tingkat menengah.
BAB III
METODE PENELITIAN
3.1 Alat dan Bahan Penelitian
Alat dan bahan yang akan digunakan dapat dilihat pada Tabel 3.1.
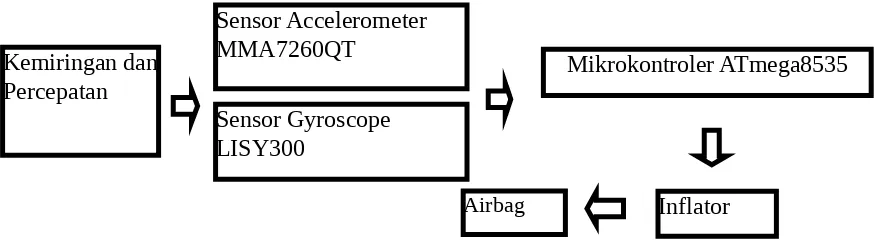
Gambar 3.2 Diagram Blok Rangkaian.
• Pada blok diagram diatas adalah merupakan diagram blok dari langkah – langkah mulai dari sensing berupa kemiringan yang diatas atau lebih dari 60⁰C dan percepatan diatas 1g. Sensor accelerometer akan membaca besarnya percepatan atau perubahan kecepatan mendadak, hal ini dilakukan untuk mendeteksi atau pencegahan saat akan terjadi kecelakaan, karena pada umumnya kecelakaan itu dapat dideteksi dari
percepatan yang besar atau perubahan kecepatan yang besar pula. Pada accelerometer ini menggunakan sumbu gerak sebagai parameter yang diukur, yaitu pada sumbu x, sumbu y, sumbu z. Sensor ini mempunyai tiga buah keluaran yang berupa tegangan analog yang dihubungkan langsung ke ADC mikrokontroler. Dengan tegangan referensi ADC pada mikrokontroler adalah 5V.
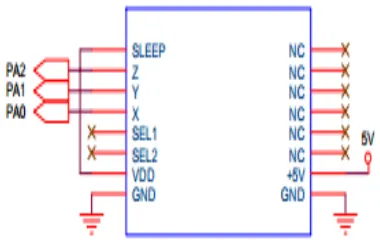
• Tegangan keluaran sumbu X, Y dan Z masing-masing dihubungkan ke PA.0, PA.1 dan PA.2.
• Pin SLEEP pada modul accelerometer dihubungkan ke pin VDD (bernilai 3,3V) yang berfungsi untuk menonaktifkan mode sleep.
• Pin SEL1 dan SEL2 tidak dihubungkan, yang berarti secara default kedua pin ini berlogika low, sehingga sensor accelerometer memiliki sensitivitas 800mV/g dengan jangkauan 1,5g.
Kelebihan sensor accelerometer:
• Dapat mengukur gerakan linier & gravitasi secara bersamaan. • Harga lebih murah dibandingkan Gyroscope.
• Accelerometer dapat memberikan pengukuran sudut tegak lurus yang akurat ketika sistem sedang diam (statis)
Kekurangan accelerometer:
• Pada accelerometer dipengaruhi oleh gravitasi. • Tidak dapat mengukur orientasi secara langsung
• Gerakan lebih patah-patah/ tidak halus seperti pada gyroscope.
Seperti yang sudah dikatakan diatas bahwa sensor accelerometer MMA7260QT, mendeteksi 3 sumbu x, y, dan z. Kemudian nilai percepatannya adalah 1,5g, 2g , 4g dan 6g. Dan sensor ini sudah tersedia dalam IC yang memiliki 16 pin. Sedangkan pin yang kami gunakan hanya pin 1,2,3,4,12,13,14, dan 15. Pin 1 dan 2 digunakan untuk memilih besarnya nilai gravitasi maksimum yang akan digunakan. Dengan konfigurasi jika pin 1 dan pin 2 diberi logika 0, maka nilai percepatan maksimum 1,5g. Pin 1 diberi logika 1 dan pin 2 diberi logika 0, maka percepatan gravitasinya 2g. Pin 1 diberi logika 0 dan pin 2 diberi logika 1 maka akan menggunakan nilai gravitasi maksimum 4g. Jika kedua pinnya diberi logika 1 maka akan menggunakan gravitasi maksimum 6g. Lalu pin12 untuk mengatur sleep mode saat tidak digunakan. Pin 3 digunakan untuk power atau sumber tegangan dan pin 4 digunakan sebagai ground nya. Pin 13 untuk keluaran terhadap sumbu z, pin 14 untuk keluaran terhadap sumbu y dan pin 15 untuk keluaran terhadap sumbu x. Dan sisa pin yang lainnya tidak digunakan. Nilai sensitivitasnya pun bervariasi, tergantung dari nilai range gravitasi yang digunakan. Semakin besar nilai range gravitasinya nilai sensitivitasnya semakin rendah. Ini terlihat saat menggunakan 1,5g nilai sensitivitasnya 800mV/g, yang berarti nilai tegangan sebesar 800mV berubah setiap 1 gravitasi. Lalu dengan range gravitasi yang ppaling besar yaitu 6g, akan menghasilkan nilai sensitivitas 200mV/g yang berarti memiliki nilai sebesar 200mV setiap perubahan 1 g.
Kemudian sensor gyroscope Hanya membutuhkan 3 wire untuk dapat
• Untuk dapat mengakses modul sensor ini pin /CS harus diberi logika low.
• Pin SCLK berfungsi sebagai serial clock, dengan kecepatan maksimal 4MHz.
• Sedangkan pin DOUT merupakan jalur keluaran data dari modul sensor ini
Kelebihan sensor gyro:
• Dapat mendeteksi gerakan dari segala arah.
• Hasil gambar yg di hasilkan dari gerakan lebih halus/ tidak patah-patah seperti pada accelerometer.
• Tidak di pengaruhi oleh gravitasi.
• Rentang skala penuh - kecepatan sudut maksimum.
• Mengukur gerakan rotasi manusia.
• Digunakan untuk mengukur baik, atau mempertahankan orientasi perangkat.
Kekurangan sensor gyro:
• Harganya yang mahal.
• Hanya dapat digunakan jika ada accelerator.
• Chip agak besar
Gambar rangkaian diatas ini dibuat menggunakan software eagle, dimana disitu terdapat mikrokontroler ATMEGA8535, sensor accelerometer MMA7269QT, sensor gyroscope LISY300, lalu lcd sebagai display. Untuk modul sensor accelerometer dihubungkan pada port A 0, port A 1, port A2, yang mana merupakan ADC, karena nilai keluaran yang diolahh adalah digital, maka melewati port ini. Sedangkan sensor gyroscope ini dihubungkan ke port B kareena sensor gyroscope ini menggunakan protocol SPI, yaitu port B 4 sebagai chip selsct yang mengatur apakah sebagai pengirim atau penerima. Port B 5 sebagai data output dari sensor yang masuk ke MOSI dan port B 7 sebagai pengatur clock nya.
Alur Kerja Sistem
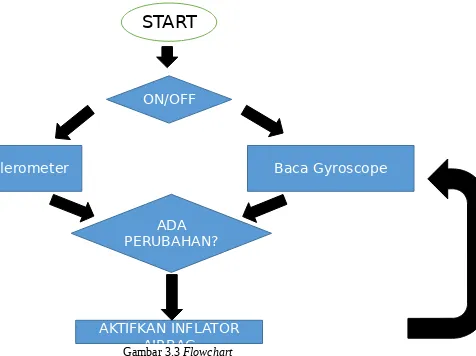
Alur kerja sistem pintu otomatis dapat dilihat pada Gambar 3.3.
Gambar 3.3 Flowchart
START
ON/OFF
Baca Gyroscope
Baca Accelerometer
ADA
PERUBAHAN?
Keterangan Flowchart:
a. dimulai dari percepatan mendadak dan kemiringan ekstrim yang telah ditentukan sebelumnya.
b. lalu, accelerometer dan gyroscope mendeteksi adanya percepatan mendadak yang diatas 1g kemudian kemiringan diatas 60⁰C
c. jika ada perubahan yang terdeteksi ,maka akan memberikan logika 1 pada keluarannya yang diteruskan kebagian keluaran, yaitu, inflator yang akan mengeluarkan nitrogen sehingga airbag terpompa.
d. ketika tidak ada perubahan, maka aktuator (inflator) tidak akan bekerja, sehingga dikembalikan lagi keproses pembacaan sensor untuk mmendeteksi ulang.
BAB IV PENUTUP 4.1. Kesimpulan
Sensor yang dipakai adalah sensor accelerometer dan gyroscope, yang ini merupakan snsor yang peka terhadap perubahan kecepatan atau percepatan dan kemiringan. Aktuator yang digunakan adalah inflator yang biasa digunakan sebagai aktuator pemompa udara ke airbag. Alat ini lebih menekankan pada pencegahan karena didasarkan pada parameter tadi, sedangkan sistem airbag pada mobil lebih kepada penanggulangan karena airbag akan mengembang setelah terjadi kecelakaan, sedangkan pada alat ini tidak. Kemudian jika meninjau pada jaket airbag yang telah ada sebelumnya di Indonesia yang masih manual, jelas ini lebih ungguk karena bersifat elektrik yang tidak butuh kait pada sepeda motor.
4.2. Saran
DAFTAR PUSTAKA
Alihasyim. 2011. Komponen Sistem Minimum Mikrokontroler ATmega8535. http://alihasyim. blogspot. com. Diakses 03 Mei 2014.
Alma’i, Vidi Rahman, Aplikasi Sensor Accelerometer pada Pendeteksi Posisi, Penelitian Teknik Elektro Universitas Diponegoro, Semarang, 2009.
Wahyudi, Adhi Susanto, Sasongko Pramono Hadi, Wahyu Widada, Simulasi Filter Kalman untuk Estimasi Posisi dengan Meggunakan Sensor Accelerometer, Jurnal Techno Science, UDINUS ,Semarang, 2009
Wardhana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta: Andi Offset.
Zuhal. 2004. Prinsip Dasar Elektroteknik. Jakarta: PT Gramedia Pustaka Utama. ---, Atmega8535 Data Sheet, http://www.atmel.com, Juli 2009.