Abstrak— Kapal dilengkapi dengan sistem panduan dan kendali yang harus mampu menavigasi dalam misi pengujian dengan baik agar dapat menjaga lintasan yang diinginkan. Kapal memiliki 6 derajat kebebasan (DOF). Pada Tugas Akhir ini menggunakan 3 DOF yaitu surge, sway dan yaw, yang mana dibedakan menjadi dua yaitu kendali kecepatan surge menggunakan metode state feedback linearization dan untuk kendali sudut heading kapal dengan menggunakan PID heading Controller yang ditambahkan dengan menggunakan model reference autopilot dan feedforward term agar kapal dapat bermanuver dengan course-changing dan course-keeping yang baik. Setelah dilakukan analisa kendali heading dan kecepatan, selanjutnya dilakukan simulasi dengan menggunakan software Matlab dan Simulink Matlab.
Kata kunci: Kendali kapal, state feedback linearization, PID Controller
I. PENDAHULUAN
ndonesia merupakan Negara kepulauan yang memiliki beribu-ribu pulau dan lautan yang luas dan di dalamnya terdapat sumber daya alam yang perlu untuk dilindungi. Perlindungan wilayah perairan yang luas tersebut dapat berupa penerapan teknologi kapal patroli. Suatu model kapal telah dirancang untuk mewakili badan kapal yang sebenarnya, yang telah dipelajari dari suatu sudut pandang manuver dan informasi manuver yaitu model kapal tanker “Esso Osaka”. Meskipun tidak bertipe badan seperti kendaraan otonom permukaan, akan tetapi memenuhi strategi panduan (guidance) yang berbeda dan strategi kontrol yang telah teruji [3].
Masalah utama dalam kendali kapal adalah trajectory tracking dan path following. Trajectory tracking mengacu pada kasus bagaimana kapal melacak jalur referensinya, sedangkan path following bertujuan mengarahkan kapal untuk mengikuti jalur yang diinginkan. Trajectory tracking sangat tergantung pada model referensi sedangkan path following lebih cenderung untuk implementasi praktis seperti panduan (guidance) dan pengendalian kapal [6].
Pada tugas akhir ini dibahas mengenai sistem pengendalian pada system dinamika model dinamika kapal tanker “Esso Osaka” menggunakan metode state feedback linearization. Dinamika kapal yang digunakan adalah model kapal tanker “Esso Osaka”, data masukan yang digunakan dalam simulasi
model adalah koefisien hidrodinamika kapal tanker [3]. Pada tugas akhir ini terdapat simulasi yang menggunakan Software Matlab.
II. DASAR TEORI
2.1 Model Dinamika Gerak Kapal
Pada prinsipnya dinamika gerak kapal dibagi dalam enam-derajat kebebasan atau degree of freedom (DOF), yaitu: surge, sway, yaw, heave, roll, dan pitch. Secara umum gerakan yang dialami sebuah kapal ketika melaju di lautan ada dua macam, yaitu gerakan translasi dan rotasi. Gerakan translasi terdiri dari surge (maju/mundur), sway (kanan/kiri), heave (atas/ bawah). Gerak rotasi kapal dibagi menjadi tiga, yaitu roll (gerakan maju), pitch (gerakan memutar ke depan), yaw (gerakan memutar ke samping) [4].
Komponen depan kecepatan relatif 𝑢𝑢𝑟𝑟 dan komponen transversal kecepatan relatif 𝑣𝑣𝑟𝑟 diberikan oleh [3]:
𝑢𝑢𝑟𝑟 = 𝑢𝑢 − 𝑢𝑢𝑐𝑐cos(𝜓𝜓 − 𝛼𝛼) (1)
𝑣𝑣𝑟𝑟 = 𝑣𝑣 + 𝑢𝑢𝑐𝑐sin(𝜓𝜓 − 𝛼𝛼) (2)
dan kenaikan laju kapal diberikan oleh
𝑈𝑈𝑟𝑟 = �𝑢𝑢𝑟𝑟2+ 𝑣𝑣𝑟𝑟2 (3)
Berdasarkan persamaan (1) dapat dituliskan bahwa kecepatan surge 𝑢𝑢 adalah 𝑢𝑢 = 𝑢𝑢𝑟𝑟− 𝑢𝑢𝑐𝑐cos(𝜓𝜓 − 𝛼𝛼) (4) 𝑢𝑢̇ = 𝑢𝑢̇𝑟𝑟− 𝑢𝑢𝑐𝑐𝑟𝑟 sin(𝜓𝜓 − 𝛼𝛼) (5) dengan 𝑢𝑢̇𝑟𝑟 =𝑚𝑚−𝑋𝑋𝑓𝑓1 𝑢𝑢̇ 𝑟𝑟 𝑓𝑓1= 𝜂𝜂1′�𝜌𝜌2𝐿𝐿2� 𝑢𝑢𝑟𝑟2+ 𝜂𝜂2′ �𝜌𝜌2𝐿𝐿3�𝑛𝑛𝑢𝑢𝑟𝑟+ 𝜂𝜂3′�𝜌𝜌2𝐿𝐿4� 𝑛𝑛2− 𝐶𝐶′𝑅𝑅′ �𝜌𝜌2𝑆𝑆𝑢𝑢𝑟𝑟2� + 𝑋𝑋′𝑣𝑣2𝑟𝑟� 𝜌𝜌 2𝐿𝐿2� 𝑣𝑣𝑟𝑟2+ 𝑋𝑋𝑒𝑒′2� 𝜌𝜌 2𝐿𝐿2𝑐𝑐2�𝑒𝑒2+ ⋯ + �𝑋𝑋𝑟𝑟′2+ 𝑚𝑚′𝑥𝑥𝐺𝐺′� �𝜌𝜌2𝐿𝐿4�𝑟𝑟2+ �𝑋𝑋𝑣𝑣′𝑟𝑟𝑟𝑟+ 𝑚𝑚′� � 𝜌𝜌 2𝐿𝐿3�𝑣𝑣𝑟𝑟𝑟𝑟 + 𝑋𝑋𝑣𝑣′𝑟𝑟2𝑟𝑟2�𝜌𝜌2𝐿𝐿4𝑈𝑈−2�𝑣𝑣𝑟𝑟2𝑟𝑟2 dimana 𝑢𝑢 = kecepatan surge; 𝑣𝑣 = kecepatan sway;
APLIKASI METODE STATE FEEDBACK
LINEARIZATION PADA SISTEM KENDALI
GERAK KAPAL
Dwi Ariyani Khalimah, DR. Erna Apriliani, M.Si
Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 E-mail: [email protected]
𝑢𝑢𝑐𝑐= kecepatan arus;
𝜓𝜓 = sudut heading kapal; 𝛼𝛼 = sudut spasial arus; 𝑚𝑚 = massa kapal;
𝑓𝑓1 = gaya yang bekerja pada surge;
2.2 Bentuk Tak Berdimensi Persamaan Gerak Kemudi Kapal Pada tugas akhir ini untuk bentuk normalisasi menggunakan Prime-system yaitu system yang menggunakan kecepatan sesaat kapal 𝑈𝑈, panjang 𝐿𝐿 = 𝐿𝐿𝑝𝑝𝑝𝑝 (panjang dari bagian depan sampai belakang kapal), waktu 𝐿𝐿/𝑈𝑈, dan satuan massa 12𝜌𝜌𝐿𝐿3 atau 12𝜌𝜌𝐿𝐿2𝑇𝑇 sebagai variabel normalisasi. Prime-System tidak dapat digunakan pada kecepatan rendah misalnya pada dinamika posisi kapal, sebab normalisasi kecepatan 𝑢𝑢, 𝑣𝑣, 𝑤𝑤 termasuk laju kecepatan 𝑈𝑈, yang mana dapat bernilai nol untuk dinamika posisi kapal. Oleh karena itu prime system banyak digunakan dalam maneuver kapal.
Pada model maneuver terdapat koefisien hidrodinamika kapal, dimana 𝑌𝑌′𝑣𝑣̇= turunan gaya arah sway terhadap 𝑣𝑣̇, 𝑌𝑌′𝑟𝑟̇= turunan gaya yaw terhadap 𝑟𝑟̇, 𝑁𝑁′𝑟𝑟̇= turunan momen yaw terhadap 𝑟𝑟̇, 𝑌𝑌′𝑣𝑣= turunan gaya arah sway terhadap 𝑣𝑣, 𝑌𝑌′𝑟𝑟= turunan gaya arah yaw terhadap 𝑟𝑟, 𝑁𝑁′𝑣𝑣= turunan momen sway terhadap 𝑣𝑣, 𝑁𝑁′𝑣𝑣̇= turunan momen sway terhadap 𝑣𝑣̇, 𝑁𝑁′𝑟𝑟= turunan momen yaw terhadap 𝑟𝑟.
𝑌𝑌′𝑢𝑢 =1 𝑌𝑌𝑢𝑢 2𝜌𝜌𝐿𝐿𝑇𝑇𝑈𝑈 = − � 𝜋𝜋𝑇𝑇 𝐿𝐿 − 𝐶𝐶𝐷𝐷𝐷𝐷� 𝑌𝑌′𝑟𝑟 =1 𝑌𝑌𝑟𝑟 2𝜌𝜌𝐿𝐿2𝑇𝑇𝑈𝑈 = 𝑋𝑋′𝑢𝑢̇+ 𝑥𝑥𝑃𝑃 𝐿𝐿 𝑌𝑌′𝑣𝑣 𝑁𝑁′𝑣𝑣=1 𝑁𝑁𝑣𝑣 2𝜌𝜌𝐿𝐿2𝑇𝑇𝑈𝑈= −(𝑋𝑋′𝑢𝑢− 𝑌𝑌′𝑣𝑣) + 𝑥𝑥𝑃𝑃 𝐿𝐿𝑌𝑌′𝑣𝑣 𝑁𝑁′𝑟𝑟 =1 𝑁𝑁𝑟𝑟 2𝜌𝜌𝐿𝐿2𝑇𝑇𝑈𝑈= 1 4𝑌𝑌′𝑣𝑣 𝑌𝑌′𝛿𝛿 =1 𝑌𝑌𝛿𝛿 2𝜌𝜌𝐿𝐿𝑇𝑇 𝑈𝑈2= 𝜌𝜌 𝜋𝜋 4 𝐴𝐴𝑅𝑅 𝐿𝐿𝑇𝑇 𝑁𝑁′𝛿𝛿=1 𝑁𝑁𝛿𝛿 2𝜌𝜌𝐿𝐿2𝑇𝑇𝑈𝑈2= − 1 2𝑌𝑌′𝛿𝛿 dengan 𝑥𝑥𝑃𝑃 = 𝑥𝑥𝐺𝐺± 0.1𝐿𝐿.
2.3 State Feedback Linearization
Feedback linearization adalah untuk mengubah dinamika sistem nonlinier menjadi sistem linier. Metode Feedback linearization mudah diterapkan untuk kapal dan kendaraan bawah air ketika model dasarnya sistem nonlinear mass-damper-spring yang mana dapat ditransformasikan menjadi sistem linear dengan menggunakan suatu pemetaan linear [5].
Jika diberikan suatu dinamika kapal tak linear sebagai berikut:
𝑀𝑀𝑣𝑣̇ + 𝑛𝑛(𝑣𝑣, 𝜂𝜂) = 𝜏𝜏 (6)
dengan 𝜂𝜂 dan 𝑣𝑣 diasumsikan dapat terukur dan 𝑛𝑛 adalah vektor tak linear:
𝑛𝑛(𝑣𝑣, 𝜂𝜂) = 𝐶𝐶(𝑣𝑣)𝑣𝑣 + 𝐷𝐷(𝑣𝑣)𝑣𝑣 + 𝑔𝑔(𝜂𝜂) (7) Maka ketaklinearan dapat dihilangkan dengan menggunakan aturan:
𝜏𝜏 = 𝑀𝑀𝑎𝑎𝑏𝑏+ 𝑛𝑛(𝜈𝜈, 𝜂𝜂) (8)
dimana vektor 𝑎𝑎𝑏𝑏 dapat dipilih sebagai pengontrol PI dengan percepatan feedforward [5]:
𝑎𝑎𝑏𝑏= 𝜈𝜈̇
𝑑𝑑− 𝐾𝐾𝑝𝑝𝜈𝜈� − 𝐾𝐾𝑖𝑖∫ 𝜈𝜈�(𝜏𝜏)𝑑𝑑𝜏𝜏0𝑡𝑡 (9)
2.4 PID Controller
PID controller merupakan algoritma kendali yang banyak digunakan. Feedback loop atau loop umpan balik dikendalikan dengan algoritma atau salah satu bentuk kecil dari jenis ini. PID terdiri dari tiga bagian yaitu Proporsional, Integral dan Derivatif. Pada Tugas Akhir ini PID controller digunakan dalam kapal autopilat untuk kendali heading kapal. Bentuk dari PID controller yaitu sebagai berikut:
𝜏𝜏𝑃𝑃𝑃𝑃𝐷𝐷(𝑠𝑠) = −𝐾𝐾𝑃𝑃�1 + 𝑇𝑇𝑑𝑑𝑠𝑠 +𝑇𝑇1𝑖𝑖𝑠𝑠� 𝜓𝜓�(𝑠𝑠)
𝜏𝜏𝑃𝑃𝑃𝑃𝐷𝐷 adalah pengontrol momen yaw, 𝜓𝜓� = 𝜓𝜓 − 𝜓𝜓𝑑𝑑 adalah eror
heading, dan 𝐾𝐾𝑃𝑃(> 0) adalah konstanta proporsional gain, 𝑇𝑇𝑑𝑑(> 0) konstanta turunan waktu, dan 𝑇𝑇𝑖𝑖(> 0) adalah
konstanta integral waktu.
Suatu bentuk PID controller untuk full state feedback adalah sebagai berikut:
𝜏𝜏𝑁𝑁(𝑠𝑠) = 𝜏𝜏𝐹𝐹𝐹𝐹(𝑠𝑠) − 𝐾𝐾𝑝𝑝�1 + 𝑇𝑇𝑑𝑑𝑠𝑠 +𝑇𝑇1
𝑖𝑖𝑠𝑠� 𝜓𝜓�(𝑠𝑠) (10)
dengan 𝜏𝜏𝑁𝑁 adalah pengontrol momen yaw, 𝜏𝜏𝐹𝐹𝐹𝐹 adalah bentuk feedforward. Bentuk kontinyu dari persamaan diatas adalah sebagai berikut: 𝜏𝜏𝑁𝑁(𝑡𝑡) = 𝜏𝜏𝐹𝐹𝐹𝐹− 𝐾𝐾𝑝𝑝𝜓𝜓� − 𝐾𝐾�𝑝𝑝𝑇𝑇𝑑𝑑 𝐾𝐾𝑑𝑑 𝑟𝑟̃ − 𝐾𝐾���𝑝𝑝/𝑇𝑇𝑖𝑖 𝐾𝐾𝑖𝑖 ∫ 𝜓𝜓�(𝜏𝜏)0𝑡𝑡 𝑑𝑑𝜏𝜏 (11) dimana 𝑟𝑟̃ = 𝑟𝑟 − 𝑟𝑟𝑑𝑑.
Pada model kapal autopilot ini menggunakan autopilot reference model untuk menghitung state yang diinginkan yaitu 𝜓𝜓𝑑𝑑, 𝑟𝑟𝑑𝑑 dan 𝑟𝑟̇𝑑𝑑, untuk course changing manuver atau perubahan
jalur. Course keeping ditentukan menggunakan signal referensi yang konstan, yaitu 𝜓𝜓𝑑𝑑= konstan.
III. ANALISISDANPEMBAHASAN
3.1 Analisis Kontrol Plant dan Kestabilan Model pada Kapal Pada Tugas Akhir ini dipisahkan antara model manuver yang terdiri dari sway dan yaw, dengan model surge. Hal ini dilakukan karena kapal bergerak pada kecepatan yang konstan. model manuver linier 2 DOF yang telah diberikan adalah sebagai berikut
𝚳𝚳𝜈𝜈̇ + 𝐂𝐂(𝜈𝜈)𝜈𝜈 + 𝐃𝐃(𝜈𝜈)𝜈𝜈 = 𝜏𝜏 (12) Dengan 𝐂𝐂(𝜈𝜈) adalah matriks Corioliscentripetal dan 𝐂𝐂(𝜈𝜈)𝜈𝜈 merupakan:
𝐂𝐂(𝜈𝜈)𝜈𝜈 = � 0 (𝑚𝑚 − 𝑋𝑋𝑢𝑢̇)𝑢𝑢0
(𝑋𝑋𝑢𝑢̇− 𝑌𝑌𝑣𝑣̇)𝑢𝑢0 (𝑚𝑚𝑥𝑥𝐺𝐺− 𝑌𝑌𝑟𝑟̇)𝑢𝑢0� �𝑣𝑣𝑟𝑟�
Dan matriks inersia sistem diberikan sebagai berikut: 𝐌𝐌 = � 𝑚𝑚 − 𝑌𝑌𝑣𝑣̇ 𝑚𝑚𝑥𝑥𝐺𝐺− 𝑌𝑌𝑟𝑟̇
𝑚𝑚𝑥𝑥𝐺𝐺− 𝑌𝑌𝑟𝑟̇ 𝑃𝑃𝑧𝑧− 𝑁𝑁𝑟𝑟̇ �
Model manuver kapal untuk sway dan yaw dikendalikan dengan kemudi tunggal yaitu
𝝉𝝉 = 𝒃𝒃𝛿𝛿 = �−𝑌𝑌−𝑁𝑁𝛿𝛿
𝛿𝛿� 𝛿𝛿
dengan matriks redaman hidrodinamika total diberikan sebagai berikut:
𝐃𝐃(𝜈𝜈) = 𝐃𝐃 + 𝐃𝐃n(𝜈𝜈) ≈ 𝐃𝐃
Matriks 𝐃𝐃 adalah matriks redaman yang linear dan 𝐃𝐃n(𝜈𝜈) adalah matriks redaman tak linear yang diabaikan sehingga persamaan (12) dapat dituliskan sebagai berikut:
𝐌𝐌𝜈𝜈̇ + 𝐍𝐍(𝑢𝑢0)𝜈𝜈 = 𝒃𝒃𝛿𝛿 (13)
dengan 𝐍𝐍(𝑢𝑢0) = 𝐂𝐂(𝜈𝜈) + 𝐃𝐃, dengan 𝐃𝐃 = − �𝑌𝑌𝑁𝑁𝑣𝑣 𝑌𝑌𝑟𝑟
sehingga didapatkan:
𝐍𝐍(𝑢𝑢0) = �(𝑋𝑋 −𝑌𝑌𝑣𝑣 (𝑚𝑚 − 𝑋𝑋𝑢𝑢̇)𝑢𝑢0− 𝑌𝑌𝑟𝑟 𝑢𝑢̇− 𝑌𝑌𝑣𝑣̇)𝑢𝑢0− 𝑁𝑁𝑣𝑣 (𝑚𝑚𝑥𝑥𝐺𝐺− 𝑌𝑌𝑟𝑟̇)𝑢𝑢0− 𝑁𝑁𝑟𝑟�
Jika persamaan (13) dijadikan dalam bentuk
𝐱𝐱̇ = 𝐀𝐀𝐱𝐱 + 𝐁𝐁𝐁𝐁 (14) dengan 𝐀𝐀 = −𝐌𝐌−1𝐍𝐍(𝑢𝑢 0) = �𝑎𝑎𝑎𝑎1121 𝑎𝑎𝑎𝑎1222� dan 𝐁𝐁 = 𝐌𝐌−1𝒃𝒃 = �𝑏𝑏11 𝑏𝑏12� Dimana 𝑎𝑎11= −(𝑚𝑚22𝑛𝑛det (𝐌𝐌)11−𝑚𝑚12𝑛𝑛21) ; 𝑏𝑏11=(𝑚𝑚22det (𝐌𝐌)𝑏𝑏1−𝑚𝑚12𝑏𝑏2) 𝑎𝑎12= −(𝑚𝑚22𝑛𝑛det (𝐌𝐌)12−𝑚𝑚12𝑛𝑛22) ; 𝑏𝑏12=(−𝑚𝑚21det (𝐌𝐌)𝑏𝑏1+𝑚𝑚21𝑏𝑏2) 𝑎𝑎21= −(−𝑚𝑚21𝑛𝑛det (𝐌𝐌)11+𝑚𝑚11𝑛𝑛21) 𝑎𝑎22= −(−𝑚𝑚21𝑛𝑛det (𝐌𝐌)12+𝑚𝑚11𝑛𝑛22)
Dan det(𝐌𝐌) = 𝑚𝑚11𝑚𝑚22− 𝑚𝑚12𝑚𝑚21. Selanjutnya akan ditunjukkan apakah model persamaan tersebut stabil atau tidak yaitu dengan cara
|𝜆𝜆𝑰𝑰 − 𝐀𝐀| = 0 𝜆𝜆2− (𝑎𝑎 11+ 𝑎𝑎22)𝜆𝜆 + (𝑎𝑎11𝑎𝑎22− 𝑎𝑎12𝑎𝑎21) = 0 Didapatkan 𝜆𝜆1=(𝑎𝑎11+𝑎𝑎22)+�(𝑎𝑎11+𝑎𝑎22)2−4(𝑎𝑎11𝑎𝑎22−𝑎𝑎12𝑎𝑎21) 2 dan 𝜆𝜆2=(𝑎𝑎11+𝑎𝑎22)−�(𝑎𝑎11+𝑎𝑎22) 2−4(𝑎𝑎11𝑎𝑎22−𝑎𝑎12𝑎𝑎21) 2 , didapatkan bahwa
𝜆𝜆1< 0 dan 𝜆𝜆2< 0. Hal ini menunjukkan bahwa sistem stabil
asimptotik.
3.2 Analisis Keterkontrolan dan Keteramatan Sistem
Pada sub bab ini akan dianalisis keterkontrolan dan keteramatan sistem. Persamaan (14) digunakan untuk mendapatkan model maneuver linear 1 DOF yaitu suatu model linear autopilot untuk kendali jalur, dengan mendefinisikan yaw rate 𝑟𝑟 sebagai outputnya, yang dapat dituliskan sebagai berikut:
𝐱𝐱̇ = 𝐀𝐀𝐱𝐱 + 𝐁𝐁𝐁𝐁 𝐲𝐲 = 𝐂𝐂𝐱𝐱 + 𝐃𝐃𝐁𝐁
Dengan 𝐲𝐲 = 𝑟𝑟, yaitu sebagai output, maka 𝐃𝐃 = 0 , sehingga dapat dituliskan sebagai berikut:
𝑟𝑟 = 𝐂𝐂𝐱𝐱
dengan 𝐂𝐂 adalah matriks [0 1], dan 𝐱𝐱 = �𝑣𝑣𝑟𝑟�, sehingga dapat diperoleh fungsi transfer 𝑟𝑟 terhadap 𝛿𝛿 yaitu
𝑟𝑟(𝑠𝑠) 𝛿𝛿(𝑠𝑠)= 𝐂𝐂(𝑠𝑠𝑃𝑃 − 𝐀𝐀)−1𝐁𝐁 = [0 1] ��𝑠𝑠 00 𝑠𝑠� − �𝑎𝑎𝑎𝑎11 𝑎𝑎12 21 𝑎𝑎22�� −1 �𝑏𝑏1 𝑏𝑏2� = 𝑎𝑎21𝑏𝑏1+(𝑠𝑠−𝑎𝑎11)𝑏𝑏2 (𝑠𝑠−𝑎𝑎11)(𝑠𝑠−𝑎𝑎22)−𝑎𝑎12𝑎𝑎21 (15)
Fungsi transfer pada persamaan (15) dapat dilakukan pendekatan dengan model Nomoto orde kedua yaitu sebagai berikut:
𝑟𝑟(𝑠𝑠) 𝛿𝛿(𝑠𝑠)=
𝐾𝐾(1+𝑇𝑇3𝑠𝑠) (1+𝑇𝑇1𝑠𝑠)(1+𝑇𝑇2𝑠𝑠)
dimana 𝑇𝑇𝑖𝑖, 𝑖𝑖 = 1, 2, 3 adalah suatu konstanta waktu dan 𝐾𝐾 adalah konstanta gain, fungsi transfer tersebut dapat
disederhanakan dengan pendekatan orde pertama dengan mendefinisikan konstanta waktu sebagai berikut:
𝑇𝑇 = 𝑇𝑇1+ 𝑇𝑇2− 𝑇𝑇3 (16)
dan jika diasumsikan 𝑇𝑇2= 𝑇𝑇3 maka jelas bahwa 𝑇𝑇 = 𝑇𝑇1, sehingga didapatkan persamaan dengan pendekatan model Nomoto orde pertama seperti berikut:
𝑟𝑟(𝑠𝑠) 𝛿𝛿(𝑠𝑠)=
𝐾𝐾 (1+𝑇𝑇𝑠𝑠)
Dan dikarenakan yaw rate 𝑟𝑟 adalah turunan pertama terhadap waktu dari sudut heading 𝜓𝜓, sehingga didapatkan fungsi transfer sebagai berikut:
𝜓𝜓(𝑠𝑠) 𝛿𝛿(𝑠𝑠)=
𝐾𝐾 𝑠𝑠(1+𝑇𝑇𝑠𝑠)
Dengan menggunakan transformasi Laplace balik didapatkan fungsi kontinu sebagai berikut
𝑇𝑇𝜓𝜓̈ + 𝜓𝜓̇ = 𝐾𝐾𝛿𝛿 (17)
dengan 𝜓𝜓̇ = 𝑟𝑟, persamaan (17) dapat juga dituliskan sebagai berikut
𝑇𝑇𝑟𝑟̇ + 𝑟𝑟 = 𝐾𝐾𝛿𝛿 (18)
Nilai 𝐾𝐾 dan 𝑇𝑇 didapatkan melalui analisis kapal ketika melakukan maneuver zig-zag.
Persamaan tersebut dapat diubah dalam bentuk matriks seperti berikut:
�𝜓𝜓̇ 𝑟𝑟̇� = �
0 1
0 −𝑇𝑇1� �𝜓𝜓𝑟𝑟� + �0𝐾𝐾𝑇𝑇� 𝛿𝛿
Dengan outputnya yaitu 𝜓𝜓, sehingga dapat dituliskan dalam bentuk state space berikut:
𝑥𝑥̇ = 𝐴𝐴𝑥𝑥 + 𝐵𝐵𝑢𝑢 𝑦𝑦 = 𝐶𝐶𝑥𝑥 dimana 𝑥𝑥 = �𝜓𝜓𝑟𝑟�, 𝑢𝑢 = 𝛿𝛿 dan 𝑦𝑦 = 𝜓𝜓, 𝐴𝐴 = �00 −11 𝑇𝑇� ; 𝐵𝐵 = � 0 𝐾𝐾 𝑇𝑇� ; 𝐶𝐶 = [1 0]
Berdasarkan teori sistem linear, sistem dikatakan terkontrol jika matriks 𝑊𝑊 memiliki rank ≥ 𝑛𝑛, dimana 𝑛𝑛 adalah orde matriks 𝑊𝑊 = [𝐵𝐵 𝐴𝐴𝐵𝐵] 𝑊𝑊 = �0 𝐾𝐾 𝑇𝑇 𝐾𝐾 𝑇𝑇 − 𝐾𝐾 𝑇𝑇2 �
Dengan nilai 𝐾𝐾 = 0.1705 s−1 dan 𝑇𝑇 = 7.1167 s, maka didapatkan nilai determinan matriks 𝑊𝑊 sebagai berikut
det(𝑊𝑊) = �0.023958 −0.003366�0 0.023958 = −0.000574
karena determinan matriks 𝑊𝑊 ≠ 0, sehingga dapat disimpulkan bahwa matriks 𝑊𝑊 memiliki rank penuh, jadi sistem ini merupakan sistem yang dapat dikontrol. Dan untuk mengetahui sistem teramati yaitu menggunakan matriks 𝑉𝑉 yaitu
𝑉𝑉 = � 𝐶𝐶𝐶𝐶𝐴𝐴� = �1 00 1�
Berdasarkan matriks 𝑉𝑉 diatas, jelas bahwa matriks tersebut memiliki rank penuh, sehingga dapat disimpulkan bahwa sistem teramati.
3.3 Analisis Pengendali Sistem dengan Menggunakan Pengontrol PID
Suatu bentuk kendali dengan menggunakan pengendali PID atau PID Controller digunakan dalam kendali autopilot yaitu sebagai berikut:
𝜏𝜏𝑁𝑁(𝑠𝑠) = 𝜏𝜏𝑃𝑃𝑃𝑃𝐷𝐷(𝑠𝑠) = −𝐾𝐾𝑃𝑃�1 + 𝑇𝑇𝑑𝑑𝑠𝑠 +𝑇𝑇1𝑖𝑖𝑠𝑠� 𝜓𝜓�(𝑠𝑠) (19)
Dengan menggunakan transformasi Laplace, persamaan (19) akan menjadi:
𝜏𝜏𝑃𝑃𝑃𝑃𝐷𝐷(𝑡𝑡) = −𝐾𝐾𝑃𝑃𝜓𝜓� − 𝐾𝐾𝑑𝑑𝑟𝑟̃ − 𝐾𝐾𝑖𝑖∫ 𝜓𝜓�(𝜏𝜏)0𝑡𝑡 𝑑𝑑𝜏𝜏 (20)
Dimana 𝑟𝑟̃ = 𝑟𝑟 − 𝑟𝑟𝑑𝑑, adalah eror yaw, 𝐾𝐾𝑑𝑑 = 𝐾𝐾𝑃𝑃𝑇𝑇𝑑𝑑, dan 𝐾𝐾𝑖𝑖 =
𝐾𝐾𝑝𝑝
𝑇𝑇𝑖𝑖. Pengontrol gain dapat ditentukan melalui :
𝐾𝐾𝑃𝑃= 𝜔𝜔𝑛𝑛 2𝑇𝑇 𝐾𝐾 > 0 ; 𝐾𝐾𝑑𝑑 = 2𝜉𝜉𝜔𝜔𝑛𝑛𝑇𝑇−1 𝐾𝐾 > 0 ; 𝐾𝐾𝑃𝑃= 𝜔𝜔𝑛𝑛3𝑇𝑇 10𝐾𝐾 > 0
Dimana 𝜔𝜔𝑛𝑛 adalah natural frekuensi yang nilainya 𝜔𝜔𝑛𝑛 = 1 𝑟𝑟𝑎𝑎𝑑𝑑/𝑠𝑠 dan 𝜉𝜉 adalah rasio redaman relatif dari sistem orde pertama dengan nilai 𝜉𝜉 = 1. Sehingga didapatkan pengontrol gain sebagai berikut, 𝐾𝐾𝑃𝑃 = 41.7422, 𝐾𝐾𝑑𝑑 = 77.6189, 𝐾𝐾𝑖𝑖 = 0.0587.
Dengan mengansumsikan bahwa 𝜓𝜓 dan 𝑟𝑟 diukur melalui kompas dan angka pengendali PID untuk full state feedback diberikan sebagai berikut:
𝜏𝜏𝑁𝑁(𝑠𝑠) = 𝜏𝜏𝐹𝐹𝐹𝐹(𝑠𝑠) − 𝐾𝐾𝑝𝑝�1 + 𝑇𝑇𝑑𝑑𝑠𝑠 +𝑇𝑇1𝑖𝑖𝑠𝑠� 𝜓𝜓�(𝑠𝑠) (21)
Dimana 𝜏𝜏𝐹𝐹𝐹𝐹 adalah suatu feedforward term yaitu: 𝜏𝜏𝐹𝐹𝐹𝐹=𝑇𝑇𝐾𝐾𝑟𝑟̇𝑑𝑑 +𝐾𝐾1𝑟𝑟𝑑𝑑
Dengan demikian bentuk pengendali PID dengan full state feedback menjadi seperti berikut:
𝜏𝜏𝑁𝑁=𝐾𝐾𝑇𝑇𝑟𝑟̇𝑑𝑑+𝐾𝐾1𝑟𝑟𝑑𝑑+ �−𝐾𝐾𝑃𝑃𝜓𝜓� − 𝐾𝐾𝑑𝑑𝑟𝑟̃ − 𝐾𝐾𝑖𝑖∫ 𝜓𝜓�(𝜏𝜏)0𝑡𝑡 𝑑𝑑𝜏𝜏�
Pada persamaan (18) merupakan suatu model autopilot. Suatu model autopilot yang menggunakan model referensi yang mana model referensi yang digunakan yaitu filter orde ketiga sederhana sebagai berikut:
𝜓𝜓𝑑𝑑 𝜓𝜓𝑟𝑟(𝑠𝑠) =
𝜔𝜔𝑛𝑛3
(𝑠𝑠+𝜔𝜔𝑛𝑛)�𝑠𝑠2+2𝜉𝜉𝜔𝜔𝑛𝑛𝑠𝑠+𝜔𝜔𝑛𝑛2�
Dimana referensi 𝜓𝜓𝑟𝑟 adalah input, 𝜉𝜉 merupakan suatu rasio redaman relative, dan 𝜔𝜔𝑛𝑛 adalah natural frekuensi. Dengan catatan bahwa lim𝑡𝑡→∞𝜓𝜓𝑑𝑑(𝑡𝑡) = 𝜓𝜓𝑟𝑟 dan 𝜓𝜓̇𝑑𝑑 , 𝜓𝜓̈𝑑𝑑 terbatas dan smooth pada 𝜓𝜓𝑟𝑟. Pada studi kasus ini diberikan 𝜓𝜓𝑛𝑛 = 0.45 𝑟𝑟𝑎𝑎𝑑𝑑/𝑠𝑠 dan 𝜉𝜉 = 1.
Bentuk pengendali dengan menggunakan PID Controller sebagai berikut:
𝑇𝑇𝑟𝑟̇ + 𝑟𝑟 =𝑇𝑇𝐾𝐾𝑟𝑟̇𝑑𝑑+𝐾𝐾1𝑟𝑟𝑑𝑑+ �−𝐾𝐾𝑃𝑃𝜓𝜓� − 𝐾𝐾𝑑𝑑𝑟𝑟̃ − 𝐾𝐾𝑖𝑖∫ 𝜓𝜓�(𝜏𝜏)0𝑡𝑡 𝑑𝑑𝜏𝜏� (22) 3.4 Analisis Penggunaan Metode State Feedback
Linearization untuk Kendali Surge
Pada bagian ini dilakukan analisis terhadap model surge kapal yaitu suatu gerakan koordinasi kapal diperoleh melalui pengendalian dari kecepatan surge. Model surge kapal yang diberikan pada persamaan (5) dan dengan mensubstitusikan 𝑢𝑢̇𝑟𝑟 =𝑚𝑚−𝑋𝑋𝑓𝑓1
𝑢𝑢̇ 𝑟𝑟 pada persamaan (5) sehingga didapatkan sebagai
berikut: 𝑢𝑢̇ =𝑚𝑚 − 𝑋𝑋𝑓𝑓1
𝑢𝑢̇𝑟𝑟
− 𝑢𝑢𝑐𝑐𝑟𝑟 sin(𝜓𝜓 − 𝛼𝛼)
(𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟)𝑢𝑢̇ = 𝑓𝑓1− 𝑢𝑢𝑐𝑐𝑟𝑟 sin(𝜓𝜓 − 𝛼𝛼)�𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟�
Dengan 𝑓𝑓1 merupakan suatu gaya yang bekerja pada surge, 𝑢𝑢̇ adalah percepatan surge, 𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟 adalah massa, dan
𝑓𝑓1 = 𝑇𝑇ℎ𝑟𝑟𝑢𝑢𝑠𝑠𝑡𝑡(𝑢𝑢𝑟𝑟, 𝑛𝑛) + 𝑓𝑓1∗(𝑢𝑢𝑟𝑟, 𝑣𝑣𝑟𝑟, 𝑢𝑢, 𝑣𝑣, 𝑟𝑟, 𝛿𝛿)
dimana 𝑇𝑇ℎ𝑟𝑟𝑢𝑢𝑠𝑠𝑡𝑡(𝑢𝑢𝑟𝑟, 𝑛𝑛) adalah fungsi gaya terhadap variabel 𝑢𝑢𝑟𝑟 dan 𝑛𝑛, dimana 𝑢𝑢𝑟𝑟 adalah kecepatan relatif depan kapal,
sedangkan 𝑛𝑛 adalah kecepatan sudut baling-baling kapal, yang diberikan sebagai berikut
𝑇𝑇ℎ𝑟𝑟𝑢𝑢𝑠𝑠𝑡𝑡(𝑢𝑢𝑟𝑟, 𝑛𝑛) = 𝜏𝜏(𝑢𝑢𝑟𝑟, 𝑛𝑛) = 𝜂𝜂1′ �𝜌𝜌2 𝐿𝐿2� 𝑢𝑢𝑟𝑟2+ 𝜂𝜂2′ �𝜌𝜌2 𝐿𝐿3� 𝑛𝑛𝑢𝑢𝑟𝑟+ 𝜂𝜂3′ �𝜌𝜌2 𝐿𝐿4� 𝑛𝑛2 dan 𝑓𝑓1∗(𝑢𝑢𝑟𝑟, 𝑣𝑣𝑟𝑟, 𝑢𝑢, 𝑣𝑣, 𝑟𝑟, 𝛿𝛿) = −𝐶𝐶′𝑅𝑅′ �𝜌𝜌2 𝑆𝑆𝑢𝑢𝑟𝑟2� + 𝑋𝑋′𝑣𝑣𝑟𝑟 2 �𝜌𝜌 2 𝐿𝐿2�𝑣𝑣𝑟𝑟2 + 𝑋𝑋𝑒𝑒′2�𝜌𝜌 2 𝐿𝐿2𝑐𝑐2�𝑒𝑒2+ ⋯ + �𝑋𝑋𝑟𝑟′2+ 𝑚𝑚′𝑥𝑥𝐺𝐺′� �𝜌𝜌 2 𝐿𝐿4� 𝑟𝑟2 + �𝑋𝑋𝑣𝑣′𝑟𝑟𝑟𝑟+ 𝑚𝑚′� � 𝜌𝜌 2 𝐿𝐿3� 𝑣𝑣𝑟𝑟𝑟𝑟 + 𝑋𝑋𝑣𝑣′𝑟𝑟2𝑟𝑟2�𝜌𝜌 2 𝐿𝐿4𝑈𝑈−2� 𝑣𝑣𝑟𝑟2𝑟𝑟2
Dengan demikian model surge pada persamaan (5) dapat dituliskan sebagai berikut
�𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟�𝑢𝑢̇ +
𝑢𝑢𝑐𝑐𝑟𝑟 sin(𝜓𝜓 − 𝛼𝛼)(𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟) − 𝑓𝑓1∗(𝑢𝑢𝑟𝑟, 𝑣𝑣𝑟𝑟, 𝑢𝑢, 𝑣𝑣, 𝑟𝑟, 𝛿𝛿) = 𝜏𝜏(𝑢𝑢𝑟𝑟, 𝑛𝑛)
Bentuk tak linear tersebut dapat dihilangkan dengan memilih bentuk pengontrol seperti berikut
𝜏𝜏(𝑢𝑢𝑟𝑟, 𝑛𝑛) = �𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟�𝑎𝑎𝑏𝑏
+ 𝑢𝑢𝑐𝑐𝑟𝑟 sin(𝜓𝜓 − 𝛼𝛼)�𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟�
− 𝑓𝑓1∗(𝑢𝑢𝑟𝑟, 𝑣𝑣𝑟𝑟, 𝑢𝑢, 𝑣𝑣, 𝑟𝑟, 𝛿𝛿)
dimana 𝑎𝑎𝑏𝑏 yaitu suatu percepatan perintah sehigga dapat dinyatakan bahwa percepatan surge 𝑢𝑢̇ = 𝑎𝑎𝑏𝑏, dengan
𝑎𝑎𝑏𝑏 = 𝑢𝑢̇
𝑑𝑑− 𝐾𝐾𝑝𝑝𝑢𝑢� − 𝐾𝐾𝑖𝑖∫ 𝑢𝑢�𝑑𝑑𝜏𝜏0𝑡𝑡
𝑎𝑎𝑏𝑏 = 𝑢𝑢̇
𝑑𝑑− 𝐾𝐾𝑝𝑝(𝑢𝑢𝑟𝑟− 𝑢𝑢𝑑𝑑) − 𝐾𝐾𝑖𝑖∫ (𝑢𝑢0𝑡𝑡 𝑟𝑟− 𝑢𝑢𝑑𝑑)𝑑𝑑𝜏𝜏
dimana 𝑢𝑢� = 𝑢𝑢𝑟𝑟− 𝑢𝑢𝑑𝑑, adalah eror kecepatan pelacakan, 𝑢𝑢𝑑𝑑 adalah kecepatan yang diinginkan, dan dengan mendefinisikan 𝐾𝐾𝑝𝑝 = 0.15 dan 𝐾𝐾𝑖𝑖 = 10−5.
Dengan demikian pengontrol kecepatan surge dapat dihitung melalui
𝜏𝜏(𝑢𝑢𝑟𝑟, 𝑛𝑛) = �𝑚𝑚 − 𝑋𝑋𝑢𝑢̇𝑟𝑟� �𝑢𝑢̇𝑑𝑑− 𝐾𝐾𝑝𝑝(𝑢𝑢𝑟𝑟− 𝑢𝑢𝑑𝑑) − 𝐾𝐾𝑖𝑖∫ (𝑢𝑢𝑟𝑟− 𝑡𝑡 0
𝑢𝑢𝑑𝑑𝑑𝑑𝜏𝜏+𝑢𝑢𝑐𝑐𝑟𝑟sin𝜓𝜓−𝛼𝛼−𝑓𝑓1∗(𝑢𝑢𝑟𝑟,𝑣𝑣𝑟𝑟,𝑢𝑢,𝑣𝑣,𝑟𝑟,𝛿𝛿) (23) Berdasarkan pengontrol 𝜏𝜏(𝑢𝑢𝑟𝑟, 𝑛𝑛) dibutuhkan nilai kecepatan 𝑢𝑢𝑑𝑑. Oleh karena itu, penentuan fungsi 𝑢𝑢𝑑𝑑 didasarkan pada
fungsi transfer filter orde kedua yang ditentukan oleh:
𝑢𝑢𝑑𝑑(𝑠𝑠) 𝑟𝑟𝑏𝑏(𝑠𝑠)=
𝜔𝜔𝑛𝑛2 𝑠𝑠2+2𝜉𝜉𝜔𝜔𝑛𝑛𝑠𝑠+𝜔𝜔𝑛𝑛 2
dengan 𝜔𝜔𝑛𝑛 > 0 dan 𝜉𝜉 > 0 sementara itu 𝑟𝑟𝑏𝑏 adalah input atau masukan perintah (kecepatan surge yang diinginkan). Fungsi transfer filter tersebut dapat dinyatakan secara kontinyu menggunakan transformasi Laplace balik sebagai berikut: 𝑢𝑢̈𝑑𝑑+ 2𝜉𝜉𝜔𝜔𝑛𝑛𝑢𝑢̇𝑑𝑑+ 𝜔𝜔𝑛𝑛2𝑢𝑢𝑑𝑑= 𝜔𝜔𝑛𝑛2𝑟𝑟𝑏𝑏 (24)
Persamaan (24) dapat diselesaikan dengan penyelesaian sebagai berikut:
𝑢𝑢̈𝑑𝑑+ 2𝜉𝜉𝜔𝜔𝑛𝑛𝑢𝑢̇𝑑𝑑+ 𝜔𝜔𝑛𝑛2𝑢𝑢𝑑𝑑= 𝜔𝜔𝑛𝑛2𝑟𝑟𝑏𝑏
PD tereduksi yaitu
𝑢𝑢̈𝑑𝑑+ 2𝜉𝜉𝜔𝜔𝑛𝑛𝑢𝑢̇𝑑𝑑+ 𝜔𝜔𝑛𝑛2𝑢𝑢𝑑𝑑= 0
Dengan memisalkan 𝑢𝑢𝑑𝑑 = 𝑒𝑒𝑘𝑘𝑡𝑡, didapatkan penyelesaian PD tereduksi yaitu
𝑢𝑢𝑑𝑑 𝑟𝑟𝑒𝑒𝑑𝑑 = 𝑐𝑐1𝑒𝑒��−𝜉𝜉+�(𝜉𝜉
2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡
+ 𝑐𝑐2𝑒𝑒��−𝜉𝜉−�(𝜉𝜉
Berdasarkan persamaan tersebut diperoleh bahwa 𝑢𝑢𝑑𝑑 1= 𝑒𝑒��−𝜉𝜉+�(𝜉𝜉2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡 dan 𝑢𝑢
𝑑𝑑 2= 𝑒𝑒��−𝜉𝜉−�(𝜉𝜉
2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡
. Selanjutnya menentukan penyelesaian dari PD lengkap yaitu
𝑢𝑢̈𝑑𝑑+ 2𝜉𝜉𝜔𝜔𝑛𝑛𝑢𝑢̇𝑑𝑑+ 𝜔𝜔𝑛𝑛2𝑢𝑢𝑑𝑑= 𝜔𝜔𝑛𝑛2𝑟𝑟𝑏𝑏
Dengan 𝑢𝑢𝑑𝑑 𝑝𝑝𝑎𝑎𝑟𝑟 = 𝐿𝐿1𝑢𝑢𝑑𝑑 1+ 𝐿𝐿2𝑢𝑢𝑑𝑑 2, yang mana 𝐿𝐿′1𝑢𝑢𝑑𝑑 1+ 𝐿𝐿′2𝑢𝑢𝑑𝑑 2= 0
𝐿𝐿′1𝑢𝑢𝑑𝑑 1′ + 𝐿𝐿′2𝑢𝑢𝑑𝑑 2′ = 𝜔𝜔𝑛𝑛2𝑟𝑟𝑏𝑏
Substitusikan 𝑢𝑢𝑑𝑑 1 dan 𝑢𝑢𝑑𝑑 2 pada persamaan di atas, dan dengan menggunakan aturan Crammer didapatkan penyelesaian sebagai berikut
𝐿𝐿1= −𝜔𝜔𝑛𝑛𝑟𝑟 𝑏𝑏 2(𝜉𝜉2−1)𝑒𝑒�−�(𝜉𝜉
2−1)�𝜔𝜔𝑛𝑛𝑡𝑡
+ 𝐶𝐶1
Begitu pula dengan 𝐿𝐿2= 𝜔𝜔𝑛𝑛𝑟𝑟 𝑏𝑏 −2(𝜉𝜉2−1)𝑒𝑒�(𝜉𝜉 2−1)𝜔𝜔𝑛𝑛𝑡𝑡 + 𝐶𝐶2 Sehingga didapatkan 𝑢𝑢𝑑𝑑 𝑝𝑝𝑎𝑎𝑟𝑟 = �−𝜔𝜔𝑛𝑛𝑟𝑟𝑏𝑏 2(𝜉𝜉2−1)𝑒𝑒�−�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛𝑡𝑡 + 𝐶𝐶1� 𝑒𝑒��−𝜉𝜉+�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡 + � 𝜔𝜔𝑛𝑛𝑟𝑟𝑏𝑏 −2(𝜉𝜉2−1)𝑒𝑒�(𝜉𝜉 2−1)𝜔𝜔𝑛𝑛𝑡𝑡 + 𝐶𝐶2�𝑒𝑒��−𝜉𝜉−�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡
Dengan demikian, penyelesain persamaan diferensial orde kedua dari persamaan (24) adalah
𝑢𝑢𝑑𝑑 = 𝑐𝑐1𝑒𝑒��−𝜉𝜉+�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡 + 𝑐𝑐2𝑒𝑒��−𝜉𝜉−�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡 + �−𝜔𝜔𝑛𝑛𝑟𝑟𝑏𝑏 2(𝜉𝜉2−1)𝑒𝑒�−�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛𝑡𝑡 + 𝐶𝐶1� 𝑒𝑒��−𝜉𝜉+�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡 + � 𝜔𝜔𝑛𝑛𝑟𝑟𝑏𝑏 −2(𝜉𝜉2−1)𝑒𝑒�(𝜉𝜉 2−1)𝜔𝜔𝑛𝑛𝑡𝑡 + 𝐶𝐶2�𝑒𝑒��−𝜉𝜉−�(𝜉𝜉 2−1)�𝜔𝜔𝑛𝑛�𝑡𝑡
3.5 Simulasi Hasil Analisa Pengendalian Menggunakan PID Controller dan State Feedback Linearization
Simulasi hasil dari analisa pengendalian, menggunakan bentuk tak berdimensi berdasarkan pada bab II. Nilai parameter yang digunakan sesuai dengan tabel 1.
Tabel 1 Nilai Karakteristik Kapal
Satuan Nilai Panjang (𝐿𝐿) 3.25 𝑚𝑚 Lebar (𝐵𝐵) 0.53 𝑚𝑚 Tinggi (𝑇𝑇) 0.217 𝑚𝑚 Koefisien Blok (𝐶𝐶𝑏𝑏) 0.831 Jumlah rudder (𝑛𝑛) 1 Massa (𝑚𝑚) 319.4 𝑘𝑘𝑔𝑔 Luas rudder (𝐴𝐴𝑅𝑅) 0.012 𝑚𝑚2 Luas propeller (𝐴𝐴𝑃𝑃) 0.0065 𝑚𝑚2 Jarak CG ke tengah kapal (𝑥𝑥𝐺𝐺) 0.103 𝑚𝑚 Kecepatan Linear (𝑈𝑈) 0.4 𝑚𝑚/𝑠𝑠 Massa jenis air laut (𝜌𝜌) 1.025 𝑘𝑘𝑔𝑔/𝑚𝑚3
3.5.1 Simulasi Pengendalian Heading dengan Menggunakan PID Controller
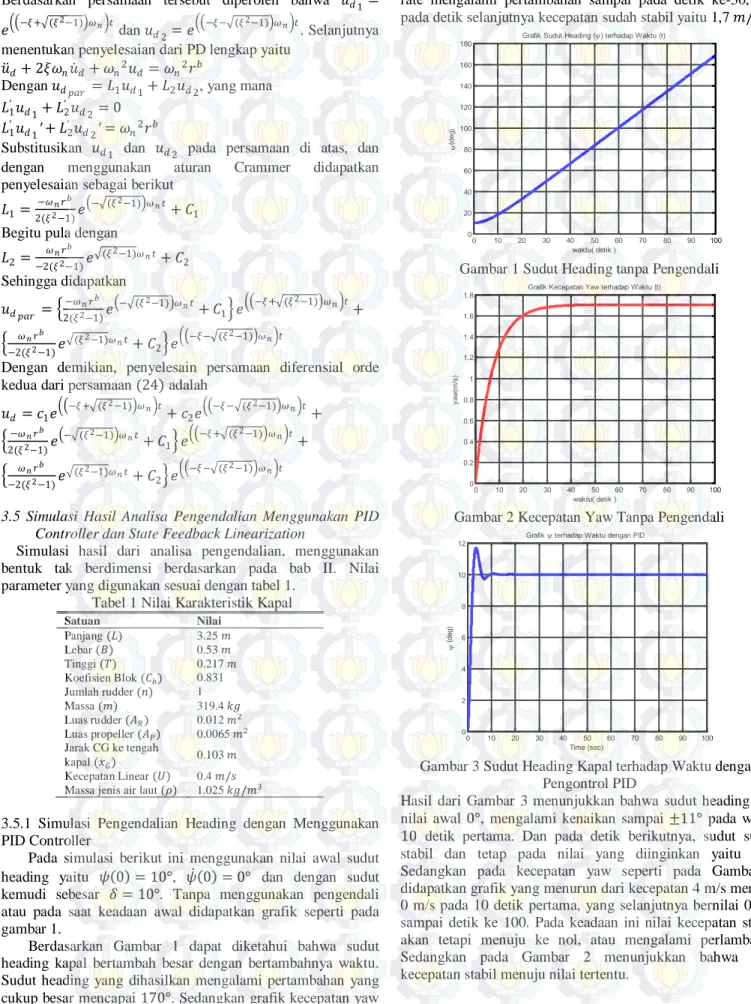
Pada simulasi berikut ini menggunakan nilai awal sudut heading yaitu 𝜓𝜓(0) = 10°, 𝜓𝜓̇(0) = 0° dan dengan sudut kemudi sebesar 𝛿𝛿 = 10°. Tanpa menggunakan pengendali atau pada saat keadaan awal didapatkan grafik seperti pada gambar 1.
Berdasarkan Gambar 1 dapat diketahui bahwa sudut heading kapal bertambah besar dengan bertambahnya waktu. Sudut heading yang dihasilkan mengalami pertambahan yang cukup besar mencapai 170°. Sedangkan grafik kecepatan yaw pada Gambar 2 menunjukkan bahwa kecepatan yaw atau yaw
rate mengalami pertambahan sampai pada detik ke-30, dan pada detik selanjutnya kecepatan sudah stabil yaitu 1,7 𝑚𝑚/𝑠𝑠.
Gambar 1 Sudut Heading tanpa Pengendali
Gambar 2 Kecepatan Yaw Tanpa Pengendali
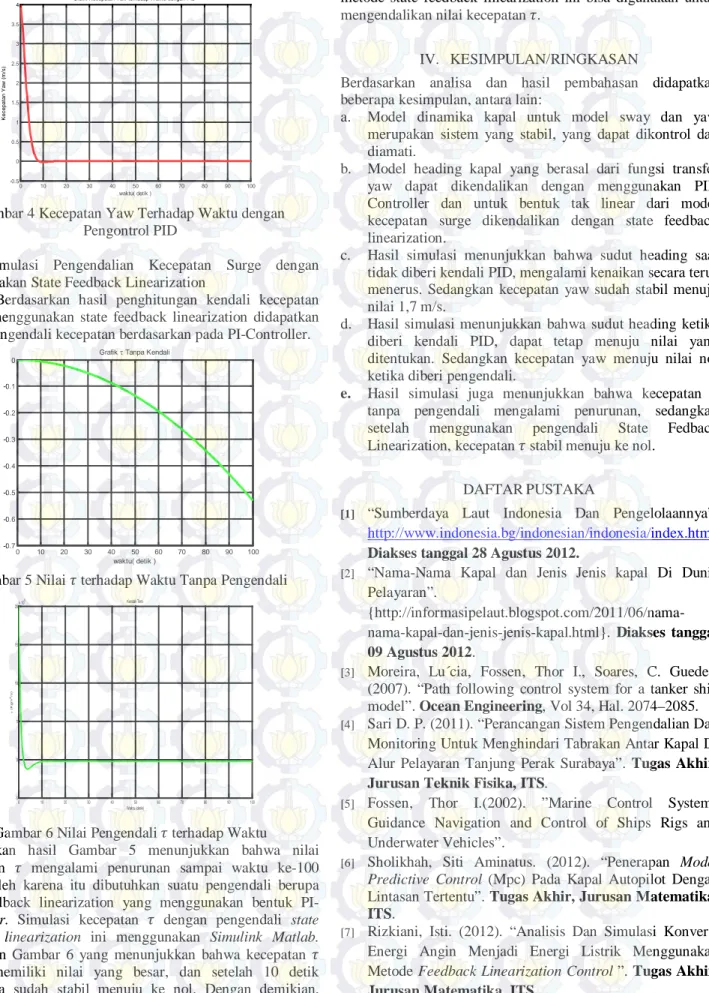
Gambar 3 Sudut Heading Kapal terhadap Waktu dengan Pengontrol PID
Hasil dari Gambar 3 menunjukkan bahwa sudut heading saat nilai awal 0°, mengalami kenaikan sampai ±11° pada waktu 10 detik pertama. Dan pada detik berikutnya, sudut sudah stabil dan tetap pada nilai yang diinginkan yaitu 10°. Sedangkan pada kecepatan yaw seperti pada Gambar 4 didapatkan grafik yang menurun dari kecepatan 4 m/s menjadi 0 m/s pada 10 detik pertama, yang selanjutnya bernilai 0 m/s sampai detik ke 100. Pada keadaan ini nilai kecepatan stabil, akan tetapi menuju ke nol, atau mengalami perlambatan. Sedangkan pada Gambar 2 menunjukkan bahwa nilai kecepatan stabil menuju nilai tertentu.
0 10 20 30 40 50 60 70 80 90 100 0 20 40 60 80 100 120 140 160 180 waktu( detik ) ψ (deg)
Grafik Sudut Heading (ψ) terhadap Waktu (t)
0 10 20 30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 waktu( detik ) y a w (m /s )
Grafik Kecepatan Yaw terhadap Waktu (t)
0 10 20 30 40 50 60 70 80 90 100 0 2 4 6 8 10 12 Time (sec) ψ ( deg)
Gambar 4 Kecepatan Yaw Terhadap Waktu dengan Pengontrol PID
3.5.2 Simulasi Pengendalian Kecepatan Surge dengan Menggunakan State Feedback Linearization
Berdasarkan hasil penghitungan kendali kecepatan dengan menggunakan state feedback linearization didapatkan bentuk pengendali kecepatan berdasarkan pada PI-Controller.
Gambar 5 Nilai 𝜏𝜏 terhadap Waktu Tanpa Pengendali
Gambar 6 Nilai Pengendali 𝜏𝜏 terhadap Waktu
Berdasarkan hasil Gambar 5 menunjukkan bahwa nilai kecematan 𝜏𝜏 mengalami penurunan sampai waktu ke-100 sekon. Oleh karena itu dibutuhkan suatu pengendali berupa state feedback linearization yang menggunakan bentuk PI-Controller. Simulasi kecepatan 𝜏𝜏 dengan pengendali state feedback linearization ini menggunakan Simulink Matlab. Dihasilkan Gambar 6 yang menunjukkan bahwa kecepatan 𝜏𝜏 diawal memiliki nilai yang besar, dan setelah 10 detik berikutnya sudah stabil menuju ke nol. Dengan demikian,
metode state feedback linearization ini bisa digunakan untuk mengendalikan nilai kecepatan 𝜏𝜏.
IV. KESIMPULAN/RINGKASAN
Berdasarkan analisa dan hasil pembahasan didapatkan beberapa kesimpulan, antara lain:
a. Model dinamika kapal untuk model sway dan yaw merupakan sistem yang stabil, yang dapat dikontrol dan diamati.
b. Model heading kapal yang berasal dari fungsi transfer yaw dapat dikendalikan dengan menggunakan PID Controller dan untuk bentuk tak linear dari model kecepatan surge dikendalikan dengan state feedback linearization.
c. Hasil simulasi menunjukkan bahwa sudut heading saat tidak diberi kendali PID, mengalami kenaikan secara terus menerus. Sedangkan kecepatan yaw sudah stabil menuju nilai 1,7 m/s.
d. Hasil simulasi menunjukkan bahwa sudut heading ketika diberi kendali PID, dapat tetap menuju nilai yang ditentukan. Sedangkan kecepatan yaw menuju nilai nol ketika diberi pengendali.
e. Hasil simulasi juga menunjukkan bahwa kecepatan 𝜏𝜏 tanpa pengendali mengalami penurunan, sedangkan setelah menggunakan pengendali State Fedback Linearization, kecepatan 𝜏𝜏 stabil menuju ke nol.
DAFTARPUSTAKA
[1] “Sumberdaya Laut Indonesia Dan Pengelolaannya”.
http://www.indonesia.bg/indonesian/indonesia/index.htm.
Diakses tanggal 28 Agustus 2012.
[2] “Nama-Nama Kapal dan Jenis Jenis kapal Di Dunia Pelayaran”.
{http://informasipelaut.blogspot.com/2011/06/nama-nama-kapal-dan-jenis-jenis-kapal.html}. Diakses tanggal 09 Agustus 2012.
[3] Moreira, Lu´cia, Fossen, Thor I., Soares, C. Guedes. (2007). “Path following control system for a tanker ship model”. Ocean Engineering, Vol 34, Hal. 2074–2085.
[4] Sari D. P. (2011). “Perancangan Sistem Pengendalian Dan Monitoring Untuk Menghindari Tabrakan Antar Kapal Di Alur Pelayaran Tanjung Perak Surabaya”. Tugas Akhir, Jurusan Teknik Fisika, ITS.
[5] Fossen, Thor I.(2002). ”Marine Control Systems Guidance Navigation and Control of Ships Rigs and Underwater Vehicles”.
[6] Sholikhah, Siti Aminatus. (2012). “Penerapan Model
Predictive Control (Mpc) Pada Kapal Autopilot Dengan Lintasan Tertentu”. Tugas Akhir, Jurusan Matematika, ITS.
[7] Rizkiani, Isti. (2012). “Analisis Dan Simulasi Konversi Energi Angin Menjadi Energi Listrik Menggunakan Metode Feedback Linearization Control ”. Tugas Akhir, Jurusan Matematika, ITS.
0 10 20 30 40 50 60 70 80 90 100 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 waktu( detik ) K ec epat an Y aw ( m /s )
Grafik Kecepatan Yaw terhadap Waktu dengan PID
0 10 20 30 40 50 60 70 80 90 100 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 waktu( detik ) τ (K g m 2/s )
Grafik τ Tanpa Kendali
0 10 20 30 40 50 60 70 80 90 100 -5 0 5 10 15 20x 10 6 Kendali Torsi Waktu (detik) τ (K g m 2/s )