PERANCANGAN SISTEM PERINGATAN DINI PADA
PERLINTASAN KERETA API MENGGUNAKAN
LOUDSPEAKER SEBAGAI SENSOR.
Suyatno
1, Lea Prasetio
2, Suyono
31)Mahasiswa S2 Fisika ITB 2) Staff Pengajar jurusan Fisika ITS 3) Mahasiswa ITS
Laboratorium Akustik Jurusan Fisika FMIPA ITS
e-mail: [email protected]
Abstrak - Telah dirancang dan dibuat alat
sistem peringatan dini datangnya kereta api pada perlintasan tanpa palang pintu, dengan menggunakan metode kontrol jarakjauh (telecontrol). Sistem ini memanfaatkan gejala fisis yang timbul ketika Kereta Api melaju yaitu dengan memanfaatkan terjadinya perubahan tekanan angin disekitar Kereta Api dan getaran di sekitar rel. Sensor yang digunakan adalah loudspeaker tipe IS 8010 WP 8 WOOFER 8 OHM yang diletakkan terpisah pada jarak tertentu dari aktuator dan sensor getaran (loudspeaker) diletakkan di dekat perlintasan. Aktuator berupa traffic light dan suara sirine yang akan aktif secara otomatis ketika Kereta Api melewati posisi sensor.
Kata Kunci: Kecepatan kereta api, perubahan
tekanan udara, loudspeaker , sirine dan traffic light.
1. Pendahuluan
Banyaknya kecelakaan antara kereta api dan kendaraan bermotor membuat keprihatinan bersama. Untuk itu perlu diambil langkah pencegahan kecelakaan diperlintasan kereta api. Langkah antisipasi itu bisa dilakukan dengan membuat palang pintu di setiap perlintasan, sebab kecelakaan kereta api dan kendaraan bermotor kerap terjadi di perlintasan yang tidak berpalang pintu. Sebagai contoh, di Daerah Operasi IV Semarang terdapat 685 perlintasan kereta api. Namun, hanya 81 yang mendapatkan penjagaan sedangkan 604 palang pintu lainnya tidak dijaga. Sementara itu, di Daerah Operasi V Purwokerto terdapat 411 perlintasan kereta api, namun yang dijaga hanya 86 perlintasan dan 325 lainnya tidak dijaga. Di Daerah Operasi VI Yogyakarta terdapat 439 perlintasan dengan 76 perlintasan dijaga, sisanya 363 tidak ada penjagaan. Dari data di atas dapat disimpulkan bahwa sistem pengaman pada perlintasan kereta api yang ada sekarang kurang memadai, sehingga langkah antisipasi yang akan diambil
diharapkan bisa menghilangkan atau paling tidak meminimalkan kecelakaan di perlintasan kereta api. Selama ini kecelakaan yang terjadi selalu disimpulkan sebagai kecelakaan murni yang disebabkan “human error” sebagai penyebab utamanya. Itu artinya, masinis, atau pegawai rendahan PT Kereta Api Indonesia (KAI) lainnya seperti asisten masinis dan penjaga palang pintu, berpeluang besar menjadi tersangka. Salah satu alternatif untuk mengurangi terjadinya kecelakaan adalah membuat sistem pengaman dengan metode peringatan dini datangya kereta api pada perlintasan tanpa palang pintu secara otomatis sehingga pengendara kendaraan bermotor yang akan melewati rel kereta api dapat mengantisipasi terjadinya kecelakaan.
Pada penelitian ini dirancang dan dibuat alat sistem peringatan dini tersebut dengan memanfaatkan gejala fisis yang timbul ketika kereta api melintas di atas rel. Alat ini digunakan untuk memberikan peringatan ketika kereta api masih berada pada jarak tertentu dari perlintasan. Untuk itu posisi sensor dan aktuator dibuat terpisah pada jarak yang sudah ditentukan. Ketika kereta api sampai pada posisi sensor maka sinyal dari sensor akan dikondisikan dan dikirim ke aktuator, yang nantinya memberi peringatan bahwa ada kereta api yang akan lewat.
2. Tinjauan pustaka.
2.1 Sistem Telekontrol ( kontrol jarak jauh )
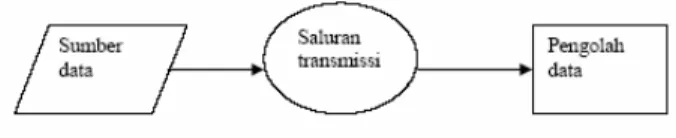
Sistem peringatan dini pada perlintasan kereta api yang dibuat, menggunakan metode telekontrol atau kontrol jarak-jauh, dengan gelombang radio sebagai pembawa sinyal. Komponen sistem telekontrol terbagi menjadi tiga blok pembangun sistem, yaitu blok sumber data, blok saluran transmisi, dan blok pengolah data. ( lihat Gambar. 2.1 )
Gambar 2.1 Blok sistem telekontrol
Blok sumber data analog berhubungan dengan besaran fisis yang dideteksi. Transmisi dapat terjadi dengan menggunakan kabel atau tanpa kabel (wireless) sebagai pengirim sinyal dan dalam Penelitian ini telah digunakan gelombang radio. Blok aktuator berhubungan dengan display alat berupa trafficlight dan sirine berbasis mikrokontroler MCS51.
Gejala fisis yang timbul ketika kereta api melintas di atas rel adalah terjadinya getaran pada rel dan perubahan tekanan udara di sekitar kereta api. Getaran di sekitar rel dan perubahan tekanan udara yang terjadi akan ditangkap oleh sensor kemudian diubah ke besaran listrik dan dikondisikan untuk diproses lebih lanjut.
2.2 Transduser
Pada alat ini transduser yang digunakan adalah transduser jenis elektromekanik, yang mengubah besaran mekanik menjadi besaran listrik. Contoh transduser elektromekanik adalah moving-coil yang terdapat pada loudspeaker atau mikropon. Tipe paling sederhana dari moving-coil transducers adalah sebatang kawat yang berada di dalam medan magnet homogen seperti diperlihatkan pada Gambar 2.2.
Dasar persamaan yang dapat diaplikasikan pada transduser tipe moving-coil
adalah
f = B l i ( 2.1 ) E = B l v ( 2.2 ) dengan,
i = arus listrik dalam ampere ( A) f = gaya ( N ) yang dihasilkan oleh arus i B = rapat flux-magnet ( Wb/m2 )
l = panjang kawat kumparan dalam meter ( m ) v =kecepatan kumparan (m/dt)
E = tegangan listrik dalam Volt ( V )
2.3 Loudspeaker
Transduser elektromekanik yang dipakai adalah loudspeaker, karena
dilihat dari konstruksinya dapat digunakan sebagai sensor getaran. ( konstruksi loudspeaker diperlihatkan pada Gambar 2.3 )
Diafragma loudspeaker pada umumnya terbuat dari kertas atau alumunium, yang ditopang oleh membran elastis pada bagian pinggir terluar dan bagian terdekat dengan koil, sehingga membran dan koil dapat bergerak bebas pada arah axial. Prinsip kerja loudspeaker ketika digunakan sebagai sensor getaran adalah membalik proses kerja loudspeaker pada umumnya. Jika terminal-terminalnya mendapat sinyal listrik seperti Gambar 2.4 (a) , maka didapatkan ouput berupa getaran pada membran. Sebaliknya pada saat digunakan sebagai sensor getaran lapisan membran pada loudspeaker berfungsi sebagai detektor getaran. Bergetarnya membran loudspeaker ketika ada hembusan angin di samping kereta api terjadi akibat getaran paksa yang disebabkan gaya hambat udara ( drag force ) yaitu tumbukan antara molekul udara dengan penampang membran. ( loudspeaker) sebagai sensor getaran diperlihatkan pada Gambar 2.4 (b) )
2.4 Rangkaian Pembagi Tegangan
Rangkaian analog digunakan untuk mengkondisikan sinyal sensor getaran agar didapatkan sinyal yang sesuai. Salah satu cara melakukannya adalah dengan memakai sensor getaran (loudspeaker) dan resistor variabel untuk membentuk jaringan pembagi tegangan ( diperlihatkan pada Gambar 2.5 ) Hubungan ini penting untuk sistem instrumentasi.
Perubahan tegangan pada titik C digunakan sebagai input penguat operasional yang didasarkan pada Op Amp 741.
2.5 Penguat Operasional
Penguat operasional (Op Amp) adalah suatu rangkaian terintegrasi yang berisi beberapa tingkat dan konfigurasi penguat diferensial. Penguat operasional memiliki dua masukan dan satu keluaran serta memiliki penguatan DC yang tinggi. Untuk dapat bekerja dengan baik, penguat operasional memerlukan tegangan catu yang simetris yaitu tegangan yang berharga positif (+V) dan tegangan yang berharga negatif (-V) terhadap tanah (ground). Penguat operasional banyak digunakan dalam berbagai aplikasi karena beberapa keunggulan yang dimilikinya, seperti penguatan yang tinggi, impedansi masukan yang tinggi, impedansi keluaran yang rendah dan lain sebagainya.
2.6 Pemakaian Op Amp sebagai Penguat Diferensial
Penguatan tegangan pada amplifier adalah perubahan pada tegangan output dibagi dengan perubahan pada tegangan input-nya.
Tegangan input dan tegangan output pada operasional amplifier diukur dari terminal bumi. Ada dua input pada Op Amp 741, yaitu input inversi dan input non inversi. Waktu kedua input dipakai, sebuah hubungan diferensial dibuat pada Op Amp. Beda tegangan (V2 – V1) diantara terminal-terminal input diperkuat dan muncul sebagai tegangan output. Maka tegangan output adalah
Vout = A ( V2 – V1 ) (2.5) dengan,
A = besarnya penguatan V1 = tegangan input inversi V2 = tegangan input non inverse
2.7 Rangkaian Timer IC 555
Rangkaian timer apabila di-trigger akan menghasilkan tegangan output TINGGI dalam selang waktu tertentu dan kembali ke kondisi normal yaitu tegangan RENDAH sampai mendapatkan trigger berikutnya. Hubungan yang harus dibuat agar IC 555 dapat digunakan sebagai timer.
Pada saat saklar S1 ditutup dengan cepat maka pin 2 dari IC terhubung pada jalur pencatu daya, akibatnya tegangan output ( pin3 )
naik pada suatu nilai yang dekat dengan nilai pencatu daya. Lamanya waktu output berada dalam kondisi TINGGI ditentukan oleh besarnya nilai kapasitor C dan resistor R.
Lebar pulsa T diberikan oleh persamaan T = 1,1 x R x C detik ( 2.6 ) dengan,R diukur dalam Ω dan C dalam Farad
2.8 Sarana Pembawa Sinyal
Sistem telekontrol pada umumnya memerlukan sarana penghubung dari lokasi atau alat yang dikontrol dengan kendali utama. Dalam sistem elektronik pembawa sinyal jarak-jauh bisa menggunakan kabel, infrared (IR), atau gelombang radio yang biasanya dikenal ( RF = Radio Frequency ). Sarana pembawa sinyal yang digunakan pada penelitian ini adalah sistem telekontroln tanpa kabel ( wireless ) yaitu menggunakan gelombang radio.
Gelombang frekuensi radio atau gelombang pembawa dihasilkan oleh osilator frekuensi radio ( osilator RF ) di stasiun pemancar. Gelombang pembawa termodulasi ditransmisikan lewat antena (transmitter) dari pemancar, kemudian ditangkap oleh penerima radio ( radio receiver ). Radio pemancar dan penerima yang digunakan pada sistem telekontrol tidak berbeda dengan radio pemancar amatir atau radio komersil pada umumnya.
3. Metodologi
Perancangan dan pembuatan alat terdiri dari beberapa bagian yaitu perancangan elektronika, perancangan program ( software ) dan cara kerja alat. Bagian elektronika meliputi catu daya, rangkaian sensor, pengkondisi sinyal, rangkaian driver, rangkaian timer dan radio pemancar-penerima. Pada perancangan program ( software ) mikrokontroler MCS51 untuk traffic light dan sirine digunakan bahasa assembly. Alur atau proses dari alat ini diperlihatkan pada diagram blok di Gambar 3.1 berikut.
Gambar 3.1. Diagram blok instrumentasi
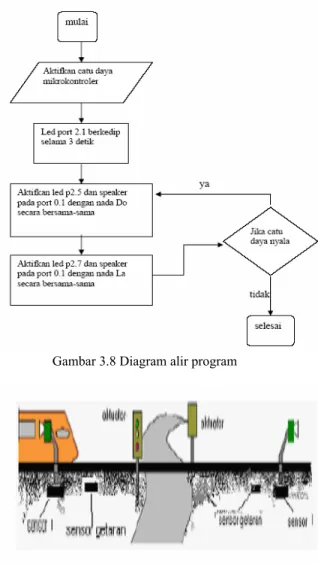
Gambar 3.8 Diagram alir program
Gambar 3. Rencana Implementasi pemasangan di lapangan.
4. Implementasi dan diskusi
4.1 Pengujian Alat dan Analisa Data
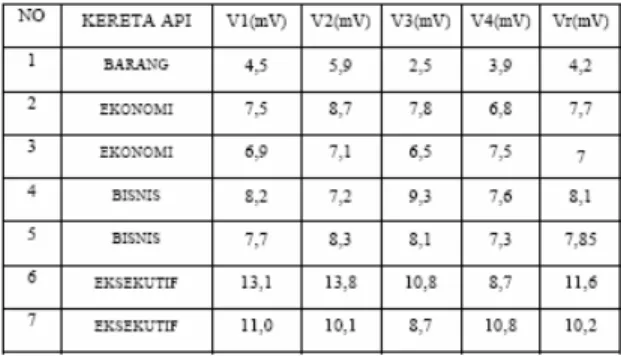
Langkah pertama sebelum alat dijalankan adalah melakukan pengujian di laboratorium. Pengujian alat di laboratorium lebih tepusat pada setup pengkondisi sinyal ketika transduser ( loudspeaker ) mendapat getaran sampai terjadi respon pada aktuator. Adapun data yang diambil adalah sebagai berikut 1. Pengambilan data tegangan output sensor
akibat hembusan angin yang timbul di samping kereta api untuk mengaktifkan sistem
2. Pengambilan data tegangan output sensor akibat getaran pada rel kereta api untuk mematikan sistem
3. Pengambilan data waktu tempuh dan kecepatan beberapa kereta api pada jarak 100 m
Pengambilan data output sensor dilakukan di laboratorium dan di lapangan. Pengambilan data di lapangan dilakukan di perlintasan kereta api di desa Wilangan Kabupaten Nganjuk. Proses pengambilan data di laboratorium dan di lapangan adalah seperti yang dipaparkan pada metodologi percobaan
Tabel 4.1 Data output sensor I akibat hembusan angin yang ditimbulkan kereta api pada pengukuran di lapangan
Tabel 4.2 Data output sensor II ( sensor getaran ) untuk mematikan sistem pada pengukuran di lapangan
5. Kesimpulan
Dari penelitian yang telah dilakukan maka dapat disimpulkan bahwa :
1. Loudspeaker direct radiator dapat digunakan sebagai sensor getaran
2. Sarana pembawa sinyal dari sensor ke aktuator dapat menggunakan gelombang radio
3. Sistem peringatan dini ini dapat digunakan pada perlintasan Kereta Api tanpa palang pintu
6. Daftar pustaka
1.Clive Braithwaite, Paul Fay, Jeffrey Hall, Roy Pickup, Pengantar Ilmu Teknik Elektronika, PT Gramedia, Jakarta, 1985. Hal 130 – 145.
2. Leo L, Beranek, Acoustics, McGraw-Hill Book Company, Inc, New York, Toronto, London, 1954. Hal 70 – 76.
3. Agfianto Eko Putra, Belajar Mikrokontroler AT89C51/52/55( Teori dan Aplikasi ), Gaya Media, 2002. Hal 15 – 30.
4. Martin Nemzow, Implementing Wireless Networks, McGraw-Hill Book Company, Inc, New York, San Francisco Wangsinton, D.C. 1995. Hal 50 – 60. 5. Robert F. Coughlin, Frederick F. Driscoll,
Penguat Operasional dan Rangkaian Terpadu Linier, Edisi kedua Erlanggga, 1983. Hal 161- 170.
6. Agus Sugiharto,”Penerapan Dasar Transduser dan Sensor”, Edisi Pertama, Kanisius, Yogyakarta, 2002. Hal 23 – 25. 7. Suyitno E, Suara merdeka, Jum’at, 10