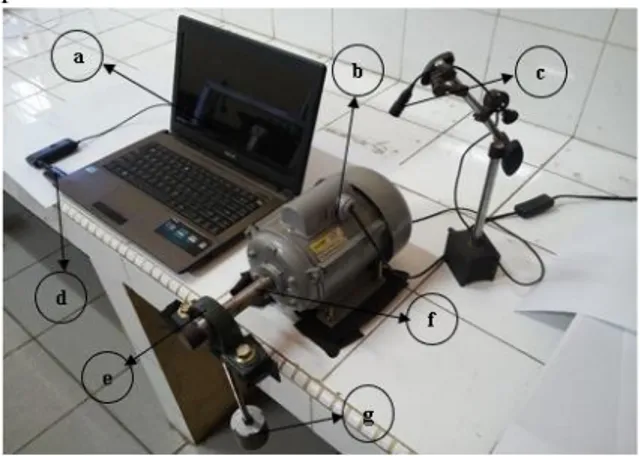
Deteksi Kerusakan Motor Induksi dengan Menggunakan Sinyal Suara
Teks penuh
Gambar
Dokumen terkait
Tujuan penulisan tugas akhir ini adalah untuk mengetahui pengaruh penambahan kapasitor luar terhadap kecepatan putar motor induksi tiga phasa jenis rotor
Pada motor arus searah kecepatan putar yang dihasilkan lebih mudah dikontrol dibandingkan dengan kecepatan putar motor arus bolak-balik yang kurang stabil
4.2.2 Mengukur Kecepatan Motor DC Spindle dengan Tachometer Pengujian kecepatan motor ini adalah untuk mengetahui pembacaan nilai kecepatan yang diukur oleh
Pengujian karakteristik motor induksi dilakukan dengan cara mengubah jumlah kutub, kemudian dilakukan pengukuran terhadap kecepatan putar rotor, slip, arus, daya, dan faktor
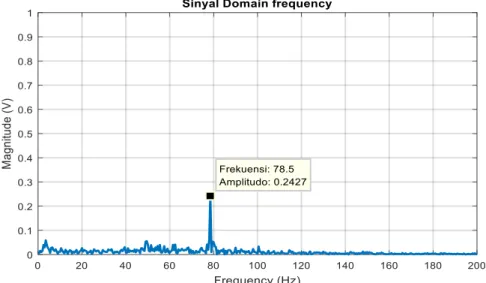
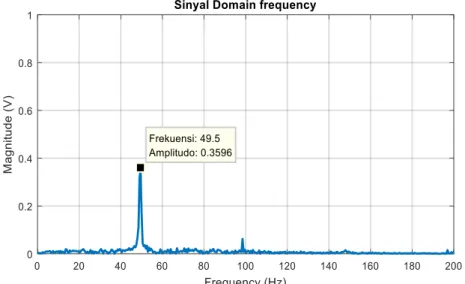
Ketiga pengujian seperti pengujian korosi 1, 2, dan 3 dapat dideteksi posisi mikrofon dan korosi, jika semakin besar tingkat kerusakan maka semakin tinggi nilai puncak
Tujuan dari penelitian ini, Untuk mengidentifikasi dan mendeteksi kerusakan bantalan akibat korosi pada pompa sentrifugal dengan kondisi yang telah ditentukan melalui
Pengujian surja dapat menjadi metode pengujian kerusakan sistem isolasi belitan stator motor induksi dengan berbagai macam jenis keruskan sistem isolasi antara
Batasan Masalah Pembahasan pada penelitian ini dibatasi pada pengaturan kecepatan putar rotor, besar torsi elektromagnetik, slip, dan frekuensi slip dari motor induksi rotor tipe
