TUGAS AKHIR
PENGENDALIAN KECEPATAN MOTOR INDUKSI TIGA PHASA
ROTOR BELITAN DENGAN MENGGUNAKAN
KAPASITOR LUAR
(Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan
pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh :
KURNIADI LUBIS
NIM: 040402041
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSTAS SUMATERA UTARA
MEDAN
PENGENDALIAN KECEPATAN MOTOR INDUKSI TIGA PHASA
ROTOR BELITAN DENGAN MENGGUNAKAN KAPASITOR LUAR
Oleh :
KURNIADI LUBIS
NIM : 040402041
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat
untuk memperoleh gelar sarjana Teknik Elektro
Disetujui Oleh :
Dosen Pembimbing,
Ir.Sumantri Zulkarnaen
Nip. 19470503 197306 1 001
Diketahui Oleh :
Pelaksana harian
Ketua Departemen Teknik Elektro FT USU,
Prof. Dr. Ir. Usman Baafai
Nip: 19461022 197302 1 001
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Dengan Nama Allah Yang Maha Pengasih Lagi Maha Penyayang
Syukur Alhamdulillah penulis ucapkan kehadirat Allah S.W.T dimana atas berkah, karunia dan rahmat-NYA lah penulis dapat menyelesaikan tugas akhir ini, dengan judul :
“Pengendalian Kecepatan Motor Induksi Tiga Phasa Rotor Belitan Dengan Menggunakan Kapasitor Luar”
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT – USU)
Tugas Akhir ini merupakan suatu syarat bagi penulis untuk memperoleh gelar Sarjana Teknik dari Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara
Dengan selesainya Tugas Akhir ini, penulis mengucapkan terima kasih yang sebesar-besarnya kepada semua pihak yang telah membantu penulis dalam menyelesaikan Tugas Akhir ini, antara lain kepada :
1. Ayahanda Armensyah Lubis dan Ibunda tercinta Rosmiah Nasution, terima kasih atas doa dan kasih sayangnya yang tiada terhitung dan tiada bosan-bosannya mengasuh, mendidik dan membimbing penulis semenjak dalam kandungan hingga sekarang ini.
2. Saudara-saudariku Taufik, Mutia dan Lisa yang selalu jadi tempat berbagi cerita baik, dalam suka maupun duka.
3. Penyejuk hati, pemberi semangat, teman setia, Liza Yenni yang telah memberi dukungan moril dan spritual serta kasih sayangnya untuk menyelesaikan tugas akhir ini.
4. Bapak Prof. Dr. Ir. Usman Baafai selaku Ketua Departemen Teknik Elektro FT-USU dan Bapak Rachmad Fauzi ST, MT selaku Sekretaris Departemen Teknik Elektro FT-USU
5. Bapak Ir.Sumantri Zulkarnain, selaku dosen pembimbing penulis yang telah membantu penulis dalam menyelesaikan Tugas Akhir ini.
6. Bapak Ir. R. Sugih Arto Yusuf, selaku dosen wali penulis yang telah membimbing penulis selama menjalani masa perkuliahan.
8. Kakanda Isroi Tanjung, ST, selaku pegawai pada Laboratorium Konversi Energi Listrik Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara. 9. Rekan-rekan sesama Assisten, Muhariadi, Ronal, Made, Eko, Zuki, Iqbal,Faisal
dan martua yang telah membantu dalam pengambilan data-data percobaan dalam penulisan tugas akhir ini.
10.Rekan-rekan seperjuangan sesama angkatan 2004, Wahyu “way carlo”, Ijal “bek tangguh”, Fauzan “karek awak”, Salman, Kifli, Willy, Leo, Frank, dan rekan – rekan lainnya yang tidak dapat penulis sebutkan satu-persatu,
11.Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh Karyawan di Jurusan Teknik Elektro Fakultas Teknik Elektro USU.
Penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, masih banyak kesalahan dan kekurangan baik dari segi isi maupun susunan bahasanya. Saran dan kritik dari pembaca dengan tujuan menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan.
Akhir kata, penulis berharap semoga tugas akhir ini bisa bermanfaat dan menambah wawasan bagi para pembacanya.
Medan, Maret 2010 Penulis
ABSTRAK
Motor induksi pada umumnya berputar dengan kecepatan konstan mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanya pengendalian putaran. Umumnya pengendalian putaran motor induksi dilakukan dengan beberapa cara yaitu dengan mengubah jumlah kutub motor, mengubah frekuensi jala-jala, mengatur tegangan jala-jala dan mengatur tahanan luar.
Pengendalian kecepatan motor induksi tiga phasa tipe rotor belitan dengan mengimplementasikan elemen pasif umumnya menggunakan tahanan dan jarang menggunakan induktor maupun kapasitor. Tahanan ini terpasang diluar motor akan tetapi memiliki hubungan listrik dengan rangkaian rotor sehingga umumnya diistilahkan dengan tahanan luar.
DAFTAR ISI
KATA PENGANTAR... ... i
ABSTRAK... ... iii
DAFTAR ISI... iv
DAFTAR GAMBAR...vii
DAFTAR TABEL...x
DAFTAR NOTASI...xi
BAB I PENDAHULUAN 1.1 Latar Belakang ...1
1.2 Tujuan dan Manfaat Penulisan...1
1.3 Batasan Masalah ...2
1.4 Metode Penulisan...2
1.5 Sistematika Penulisan ...3
BAB II MOTOR INDUKSI TIGA PHASA 2.1 Umum ...4
2.2 Konstruksi Motor Induksi Tiga Phasa ...5
2.3 Jenis Motor Induksi Tiga Phasa...7
2.3.1 Motor Induksi Tiga Phasa Sangkar Tupai...7
2.3.2 Motor Induksi Tiga Phasa Rotor Belitan...8
2.4 Prinsip Kerja Motor Induksi ...10
2.5 Frekuensi Arus Rotor ...14
2.6 Rangkaian Ekivalen Motor Induksi ...15
2.7 Aliran Daya Pada Motor Induksi ...21
2.9 Disain Kelas Motor Induksi ...24
BAB III PENGATURAN KECEPATAN MOTOR INDUKSI TIGA PHASA 3.1 Pengaturan Putaran Motor Induksi ...26
3.1.1 Mengubah Jumlah Kutub Motor ...26
3.1.2 Mengatur Frekuensi Sumber ...27
3.1.3 Mengatur Tegangan Input Stator ...29
3.1.4 Mengatur Tahanan Rotor ...30
3.2 Pengaruh Kapasitor Terhadap Motor Induksi...33
3.2.1 Kapasitor Secara Umum ...33
3.2.2. Penambahan Kapasitor Luar ...37
BAB IV PENGUJIAN DAN HASIL PENGUKURAN 4.1 Umum ...44
4.2 Peralatan Yang Digunakan ...44
4.3 Percobaan Untuk Mendapatkan Parameter Motor Induksi ...45
4.3.1. Percobaan Tahanan DC...45
4.3.2. Percobaan Rotor Tertahan (Block Rotor) ...46
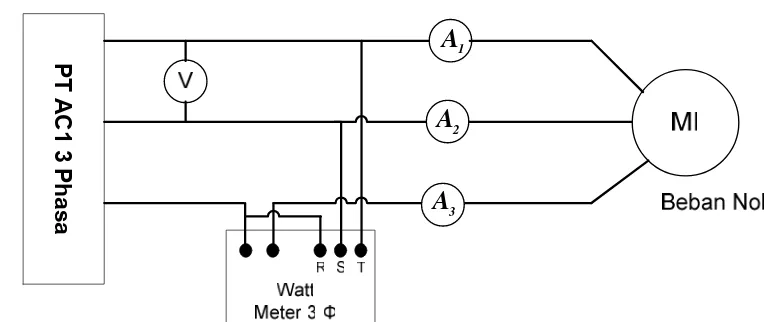
4.3.3. Percobaan Beban Nol...47
4.4 Pengaruh Penambahan Kapasitor Luar ...48
4.4.1. Menggunakan Motor Induksi...48
4.4.2. Menggunakan Simulasi Matlab ...50
4.5 Simulasi Pengendalian Kecepatan ...52
4.6 Analisa Data...53
Kecepatan Motor...55 4.6.3 Pengaruh Penambahan Kapasitor Luar Terhadap
Torsi Motor...58 4.6.4 Pengaruh Penambahan Kapasitor Luar Terhadap
Arus Motor Induksi...61 4.6.5 Pengaruh Penambahan Kapasitor Luar Terhadap
Faktor Daya dan
Efisiensi...66
DAFTAR GAMBAR
Gambar 2.1 Konstruksi Motor Induksi ...5
Gambar 2.2 Komponen Stator Motor Induksi Tiga Phasa...6
Gambar 2.3 Konstruksi rotor motor induksi rotor sangkar...7
Gambar 2.4 Konstruksi motor induksi rotor sangkar ...8
Gambar 2.5 Skematik motor induksi rotor belitan ...9
Gambar 2.6 Konstruksi motor induksi rotor belitan ...10
Gambar 2.7 Penampang rotor dan stator motor Induksi memperlihatkan medan magnet dalam celah udara...11
Gambar 2.8 Rangkaian ekivalen Stator ...16
Gambar 2.9 Rangkaian ekivalen Rotor...18
Gambar 2.10 Rangkaian ekivalen Motor Induksi ...19
Gambar 2.11 Rangkaian ekivalen Motor Induksi dilihat dari sisi Stator...19
Gambar 2.12 Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator...20
Gambar 2.13 Rangkaian ekivalen motor induksi dengan mengabaikan tahanan Rc...20
Gambar 2.14 Aliran Daya Motor Induksi ...22
Gambar 3.1 Pelaksanaan lilitan untuk mengubah jumlah kutub dengan mengubah sambungan phasa ...26
Gambar 3.2 Hubungan seri dan paralel dari masing-masing phasa...27
Gambar 3.3 Karakteristik torsi putaran dengan pengaturan frekuensi ...28
Gambar 3.4 Pengaturan tegangan dengan autotransformator ...29
Gambar 3.5 Kurva Torsi-Putaran untuk tegangan stator yang berbeda...30
Gambar 3.7a Rangkaian Ekivalen Motor Induksi Rotor Belitan per-phasa (Rugi-rugi
inti diabaikan) ...31
Gambar 3.7b Rangkaian Ekivalen Motor Induksi Rotor Belitan per-phasa dilihat dari sisi stator ...32
Gambar 3.8 Kurva torsi-slip sebagai fungsi perubahan tahanan luar ...33
Gambar 3.9 Kapasitor keping sejajar...34
Gambar 3.10 Kapasitor hubungan seri dan parallel...34
Gambar 3.11 Kapasitor tiga phasa hubungan Wye dan Delta ...36
Gambar 3.12 Penambahan kapasitor hubungan delta pada motor induksi ...37
Gambar 3.13 Kapasitor tiga phasa hubungan Delta yang dihubungkan pada rotor ...38
Gambar 3.14 Penambahan kapasitor luar pada motor induksi ...39
Gambar 3.15 Rangkaian ekivalen per-phasa motor induksi (Tahanan RC diabaikan)...39
Gambar 3.16 Rangkaian ekivalen per-phasa motor induksi (dengan total reaktansi di rotor) ...40
Gambar 3.17 Rangkaian Thevenin ...42
Gambar 4.1 Rangkaian Percobaan Tahanan DC pada Stator ...45
Gambar 4.2 Gambar rangkaian percobaan rotor tertahan...46
Gambar 4.3 Rangkaian Percobaan Beban Nol...47
Gambar 4.4 Rangkaian Percobaan Penggunaan Kapasitor Luar Tanpa Beban ...48
Gambar 4.5 Rangkaian Simulasi Penggunaan Kapasitor Luar Tanpa Beban...50
Gambar 4.6 Rangkaian SimulasiPengendalian Kecepatan ...52
Gambar 4.7 Grafik Pengaruh Penambahan Kapasitor Terhadap Kecepatan Motor ...57
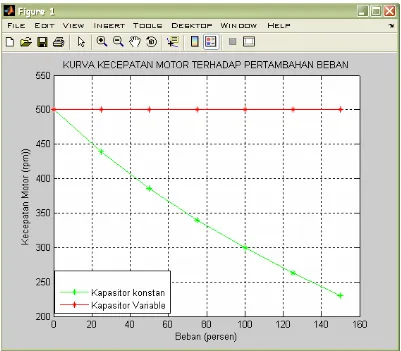
Gambar 4.8 Grafik Pengendalian Kecepatan Motor Pada Kecepatan 500 rpm Untuk Setiap Kondisi Pembebanan ...58
Gambar 4.10 Grafik Pengaruh Penambahan Kapasitor Terhadap
Arus Motor Induksi...65 Gambar 4.11 Grafik Pengaruh Penambahan Kapasitor Terhadap
DAFTAR TABEL
Tabel 4.1 Data Percobaan Tahanan DC pada Stator...46
Tabel 4.2 Data Percobaan rotor tertahan ...47
Tabel 4.3 Data Percobaan Beban Nol ...48
Tabel 4.4 Data Percobaan Penggunaan Kapasitor Luar Tanpa Beban ...49
Tabel 4.5 Data Simulasi Penggunaan Kapasitor Luar Tanpa Beban ...51
DAFTAR NOTASI
a = Perbandingan belitan
C = Kapasitansi kapasitor (Farad)
E1 = Tegangan induksi pada kumparan stator (Volt) E2 = Tegangan induksi pada kumparan rotor (Volt)
E2s = Tegangan induksi pada kumparan rotor dalam keadaan berputar (Volt) f1 = Frekuensi sumber tegangan (Hz)
f2 = Frekuensi rotor motor induksi (Hz) I1 = Arus stator (Ampere)
I2 = Arus rotor (Ampere) N1 = Jumlah belitan pada stator N2 = Jumlah belitan pada rotor
ns = Kecepatan medan putar stator (rpm) nr = Kecepatan putar motor induksi (rpm) P = Jumlah kutub
Pin = Daya input motor induksi (Watt)
PAG = Daya yang ditranfer melalui celah udara (Watt) Pconv = Daya mekanis keluaran (output) (Watt)
PRCL = Rugi – rugi tembaga pada kumparan rotor (Watt) PSCL = Rugi – rugi tembaga pada kumparan stator (Watt) R1 = Resistansi efektif stator (Ohm)
S = Slip (Persen)
V1 = Tegangan terminal stator (Volt) XC = Reaktansi kapasitif (Ohm) X1 = Reaktansi bocor stator (Ohm)
X2 = Reaktansi pada saat rotor diam (Ohm) X2s = Reaktansi pada saat rotor berputar (Ohm)
= Perbedaan sudut phasa antara arus masukan dengan tegangan sumber = Efisiensi motor induksi (Persen)
ABSTRAK
Motor induksi pada umumnya berputar dengan kecepatan konstan mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanya pengendalian putaran. Umumnya pengendalian putaran motor induksi dilakukan dengan beberapa cara yaitu dengan mengubah jumlah kutub motor, mengubah frekuensi jala-jala, mengatur tegangan jala-jala dan mengatur tahanan luar.
Pengendalian kecepatan motor induksi tiga phasa tipe rotor belitan dengan mengimplementasikan elemen pasif umumnya menggunakan tahanan dan jarang menggunakan induktor maupun kapasitor. Tahanan ini terpasang diluar motor akan tetapi memiliki hubungan listrik dengan rangkaian rotor sehingga umumnya diistilahkan dengan tahanan luar.
BAB 1
PENDAHULUAN
I.1 Latar Belakang
Motor Induksi merupakan motor arus bolak-balik (ac) yang paling luas penggunaannya. Penamaannya berasal dari kenyataan bahwa tegangan dan arus motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan tegangan dan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar stator.
Pada prinsipnya, motor induksi beroperasi pada kecepatan konstan mendekati kecepatan sinkronnya. Namun dalam penggunaannya beberapa industri sering membutuhkan putaran yang bervariasi. Putaran motor induksi dipengaruhi nilai Slipnya yang merupakan perbedaan kecepatan relatif antara kecepatan putar medan putar stator dengan kecepatan putar rotor motor induksi. Dengan melakukan penambahan Kapasitor luar akan mempengaruhi nilai Impedansi motor, yang akhirnya akan merubah kinerja motor termasuk putaran.
I.2 Tujuan dan Manfaat Penulisan
Tujuan penulisan tugas akhir ini adalah untuk mengetahui pengaruh penambahan kapasitor luar terhadap kecepatan putar motor induksi tiga phasa jenis rotor belitan.
Selain itu dapat pula digunakan sebagai bahan acuan guna pengembangan praktikum Mesin-mesin Listrik dan Konversi Energi Listrik di Laboratorium Konversi Energi Listrik FT – USU.
I.3 Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis membatasi permasalahan yang akan dibahas sebagai berikut :
1. Motor yang digunakan adalah motor induksi tiga phasa rotor belitan. 2. Tidak membahas gangguan yang terjadi pada motor induksi.
3. Tidak membahas masalah starting motor induksi.
4. Motor Induksi dalam keadaan berbeban dilakukan menggunakan simulasi.
I.4 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa metode studi diantaranya :
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan dengan topik tugas akhir ini dari buku-buku referensi baik yang dimiliki oleh penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal, internet dan lain-lain
2. Studi lapangan yaitu dengan melaksanakan percobaan di laboratorium Konversi Energi Listrik FT-USU..
I.5 Sistematika Penulisan
Untuk memberikan gambaran mengenai Tugas Akhir ini, penulisan tugas akhir ini disajikan dengan sistematika sebagai berikut :
BAB I PENDAHULUAN
Bab ini menguraikan tentang latar belakang penulisan, tujuan dan manfaat penulisan, batasan masalah, metode penulisan dan sistematika penulisan. BAB II MOTOR INDUKSI TIGA PHASA
Bab ini menjelaskan tentang motor induksi tiga phasa secara umum, konstruksi, jenis motor induksi, prinsip kerja, frekuensi arus rotor, rangkaian ekivalen serta aliran daya dari motor induksi tiga phasa.
BAB III PENGATURAN KECEPATAN MOTOR INDUKSI TIGA PHASA Bab ini membahas tentang pengaturan putaran motor induksi tiga phasa danpengaruh kapasitor terhadap motor induksi.
BAB IV PENGUJIAN DAN HASIL PENGUKURAN
Bab ini membahas tentang pengujian dan pengukuran serta penganalisaan terhadap data-data yang diperoleh dengan bantuan Matlab 7.5.
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan tentang hal-hal yang dianggap penting dari hasil penelitian yang dirangkumkan sebagai kesimpulan dan saran.
BAB II
MOTOR INDUKSI TIGA PHASA
2.1 UMUM
Motor induksi merupakan motor listrik arus bolak balik (ac) yang paling luas digunakan. Penamaannya berasal dari kenyataan bahwa motor ini bekerja berdasarkan induksi medan magnet stator ke rotornya, dimana arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator.
Mesin ini juga disebut mesin asinkron (mesin tak serempak), hal ini dikarenakan putaran motor tidak sama dengan putaran fluks magnet stator. Dengan perkataan lain, bahwa antara rotor dan fluks magnet stator terdapat selisih perputaran yang disebut dengan slip.
Pada umumya motor ac yang digunakan adalah motor induksi, terutama motor induksi tiga phasa yang paling banyak dipakai di perindustrian. Motor induksi tiga phasa sangat banyak dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi juga memiliki beberapa kelemahan.
Keuntungan motor induksi tiga phasa:
1. Sangat sederhana dan daya tahan kuat (konstruksi hampir tidak pernah terjadi kerusakan, khususnya tipe squirel cage).
2. Harga relatif murah dan perawatan mudah.
3. Efisiensi tinggi. Pada kondisi berputar normal, tidak dibutuhkan sikat dan karenanya rugi daya yang diakibatkannya dapat dikurangi.
Kerugian motor induksi tiga phasa:
1. Kecepatan tidak dapat berubah tanpa mengorbankan efisiensi. 2. Kecepatannya menurun seiring dengan pertambahan beban.
2.2 KONSTRUKSI MOTOR INDUKSI TIGA PHASA
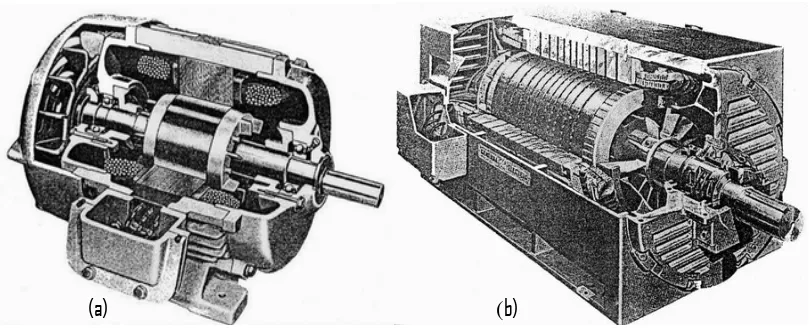
Motor induksi merupakan motor listrik arus bolak balik (ac) yang paling luas digunakan, karena konstruksinya yang kuat dan karakteristik kerjanya yang baik. Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat diperlihatkan pada gambar 2.1.
terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga phasa.
!
Diantara stator dan rotor terdapat celah udara yang merupakan ruangan antara stator dan rotor. Pada celah udara ini lewat fluks induksi stator yang memotong kumparan rotor sehingga meyebabkan rotor berputar. Celah udara yang terdapat antara stator dan rotor diatur sedemikian rupa sehingga didapatkan hasil kerja motor yang optimum. Bila celah udara antara stator dan rotor terlalu besar akan mengakibatkan efisiensi motor induksi rendah, sebaliknya bila jarak antara celah terlalu kecil/sempit akan menimbulkan kesukaran mekanis pada mesin.
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis motor induksi tiga phasa berdasarkan jenis rotornya.
2.3 JENIS MOTOR INDUKSI TIGA PHASA
Ada dua jenis motor induksi tiga phasa berdasarkan rotornya yaitu: 1. Motor induksi tiga phasa sangkar tupai ( squirrel-cage motor) 2. Motor induksi tiga phasa rotor belitan ( wound-rotor motor )
kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda dalam konstruksi rotor.
2.3.1 Motor Induksi Tiga Phasa Sangkar Tupai
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada motor sangkar tupai tiga phasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan phasa ini dapat tersambung dalam hubungan delta ( ) ataupun bintang ( ).
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.3 di bawah ini.
" # "
ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar.
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin. Rotor jenis rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar pada tegangan rendah. Motor induksi dengan rotor sangkar ditunjukkan pada Gambar 2.4.
$ " %
$ " %
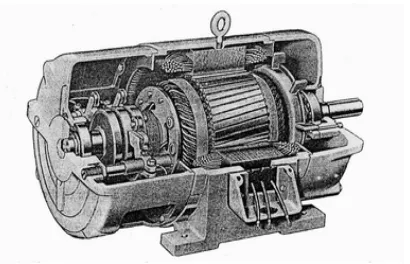
2.3.2 Motor Induksi Tiga Phasa Rotor Belitan
Motor rotor belitan ( motor cincin slip ) berbeda dengan motor sangkar tupai dalam hal konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan Phasa rotor dihubungkan secara dan masing – masing phasa ujung terbuka yang dihubungkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada gambar 2.5. Dari gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang berfungi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor. Selama pengasutan, penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan rotor sangkar. Konstruksi motor tiga phasa rotor belitan ditunjukkan pada gambar di bawah ini.
$ & "
" $ & "
2.4 PRINSIP KERJA MOTOR INDUKSI
Jika pada belitan stator diberi tegangan tiga phasa, maka pada stator akan dihasilkan arus tiga phasa, arus ini menghasilkan medan magnetik yang berputar dengan kecepatan sinkron. Ketika medan melewati konduktor rotor, dalam konduktor ini diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam belitan sekunder transformator oleh fluksi arus primer. Rangkaian rotor merupakan rangkaian tertutup, baik melalui ujung cincin atau tahanan luar, ggl induksi menyebabkan arus mengalir dalam konduktor rotor. Jadi arus yang mengalir pada konduktor rotor dalam medan magnet yang dihasilkan stator akan menghasilkan gaya (F) yang bekerja pada rotor.
Gambar 2.7 di bawah ini menggambarkan penampang stator dan rotor motor induksi, dengan medan magnet diumpamakan berputar searah jarum jam dan dengan statornya diam seperti pada saat start.
magnet seperti yang ditunjukkan, gaya pada konduktor mengarah ke atas karena medan magnet di bawah konduktor lebih kuat dari pada medan di atasnya. Agar sederhana, hanya
&
'
satu konduktor rotor yang diperlihatkan. Tetapi, konduktor – konduktor rotor yang berdekatan lainnya dalam medan stator juga mengalirkan arus dalam arah seperti pada konduktor yang ditunjukkan, dan juga mempunyai suatu gaya ke arah atas yang dikerahkan pada mereka. Pada setengah siklus berikutnya, arah medan stator akan dibalik, tetapi arus rotor juga akan dibalik, sehingga gaya pada rotor tetap ke atas. Demikian pula konduktor rotor di bawah kutup – kutup medan stator lain akan mempunyai gaya yang semuanya cenderung memutarkan rotor searah jarum jam. Jika kopel yang dihasilkan cukup besar untuk mengatasi kopel beban yang menahan, motor akan melakukan percepatan searah jarum jam atau dalam arah yang sama dengan perputaran medan magnet stator.
1. Apabila belitan stator dihubungkan dengan sumber tegangan tiga phasa yang sinusoidal dan setimbang, maka akan dihasilkan arus yang juga sinusoidal pada tiap belitan phasa.
2. Arus pada tiap phasa menghasilkan fluksi yang juga sinusoidal. Dengan menganggap belitan stator adalah reaktif murni dimana arus tertinggal 900 dari tegangan, maka fluksi yang dihasilkan adalah :
t sin
m ωωωω Φ Φ Φ Φ Φ Φ Φ
Φ ==== (Weber) ...(2.1)
3. Akibat fluksi yang berputar timbul ggl induksi pada belitan stator motor yang besarnya adalah
e1 =
dt d N1 ΦΦΦΦ
− −−
− ( Volt )...(2.2a)
(
)
dt t sin d N m 1 ω Φ − = t cos Ne1=− 1×ω×Φm× ω
Pada kondisi maksimum, e1maks = N1 m , dimana = 2 f1 sehingga harga
efektifnya adalah :
2 f 2 N 2 e
E1 = 1maks = 1 π 1Φm
m 1 1 1 4,44f N
E ==== ΦΦΦΦ ( Volt )....(2.2b)
4. Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang berputar
dengan kecepatan sinkron ns, besarnya nilai ns ditentukan oleh jumlah kutub p dan
frekuensi stator f yang dirumuskan dengan :
p f 120
5. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya
pada belitan rotor timbul tegangan induksi (ggl) sebesar E2 yang besarnya :
m 2 2 2 4,44f N
E ==== ΦΦΦΦ ( Volt )....(2.4)
dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N2 = Jumlah belitan belitan rotor
m = Fluksi maksimum (Wb)
6. Karena belitan rotor merupakan rangkaian tertutup, maka ggl tersebut akan
menghasilkan arus I2.
7. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
8. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban,
rotor akan berputar searah medan putar stator.
9. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron.
Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut slip (S) dan
dinyatakan dengan
% 100 n
n n S
s r s
× ×× × − − − − = ==
= ....(2.5)
10.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada
belitan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini
dinyatakan dengan E2s yang besarnya
m 2 1 s
2 4,44Sf N
E ==== ΦΦΦΦ ( Volt )....(2.6)
dimana
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
f2 = S.f1 = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam keadaan
11.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada belitan
rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr < ns.
2.5 FREKUENSI ARUS ROTOR
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan ( sumber ). Tetapi ketika rotor sudah berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip.
Untuk besar slip tertentu, maka frekuensi rotor sebesar f2 yaitu :
120 ) ( 2 r s n n p
f = −
dengan mengalikan persamaan diatas dengan
s s n n didapat : s s r s n n n n p
f = − ×
120 ) ( 2 s r s s n n n pn
f = × −
120 2 dimana, s r s n n n
S = − dan
120
1
s
pn
f = maka frekuensi di rotor adalah :
1 2 S f
f ==== ×××× (Hertz)……….…..………..(2.7)
E2s = 4,44 f2 N2 m
= 4,44 S f1 N2 m
E2s = S E2 (Volt)………..………...….( 2.8)
E2 : ggl pada saat rotor diam (nr = ns) E2s : ggl pada saat rotor berputar
X2s = 2 f2 L2
= 2 S f1 L2
X2s = S X2 (ohm)………...………..….(2.9)
X2 : reaktansi pada saat rotor diam (nr = ns) X2s : reaktansi pada saat rotor berputar
2.6 RANGKAIAN EKIVALEN MOTOR INDUKSI
Untuk menentukan rangkaian ekivalen dari motor induksi tiga phasa, pertama -tama perhatikan keadaan pada stator. Gelombang fluks pada celah udara yang berputar serempak membangkitkan ggl lawan tiga phasa yang seimbang di dalam phasa-phasa stator. Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar jatuh tegangan pada impedansi bocor stator, sehingga dapat dinyatakan dengan persamaan
1
V = E1 + I1( R1 ++++ jX1 ) (Volt) ………...….(2.10)
Di mana: V1 = tegangan terminal stator (Volt)
1
E = ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt)
1
I = arus stator (Ampere)
1
R = resistansi efektif stator (Ohm)
1
Seperti halnya transformator, arus stator dapat dipecah menjadi dua komponen, komponen beban dan komponen peneralan. Komponen beban I2 menghasilkan suatu
fluks yang akan melawan fluks yang diakibatkan arus rotor. Komponen peneralan IΦ,
merupakan arus stator tambahan yang diperlukan untuk menghasilkan fluks celah udara resultan. Arus peneralan dapat dipecah menjadi komponen rugi – rugi inti Ic yang sephasa dengan E1 dan komponen magnetisasi Im yang tertinggal dari E1 sebesar 90 . °
Sehingga dapat dibuat rangkaian ekivalen pada stator, seperti gambar 2.8 berikut ini :
1 V
1 R
1 X
1 I
c
R Xm
Φ
I
c I
m I 2 I
1 E
" (
Misalkan pada rotor belitan, jika belitan yang dililit sama banyaknya dengan jumlah kutub dan phasa stator. Jumlah lilitan efektif tiap phasa pada lilitan stator banyaknya a kali jumlah lilitan rotor. Bandingkan efek magnetis rotor ini dengan yang terdapat pada rotor ekivalen magnetik yang mempunyai jumlah lilitan yang sama seperti stator. Untuk kecepatan dan fluks yang sama, hubungan antara tegangan Erotor yang diimbaskan pada rotor yang sebenarnya dan tegangan E2s yang diimbaskan pada rotor ekivalen adalah
E2s = a Erotor (Volt)………..…..……..(2.11)
I2s= a Irotor
(Volt)………..……….(2.12)
Akibatnya hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen dan impedansi bocor frekuensi slip Zrotor dari rotor yang sebenarnya haruslah sebagai berikut.
s 2
Z = ====
s 2 s 2 I E = = = = rotor rotor 2 I E a rotor 2Z
a ( Ohm )……….….(2.13)
Karena rotor terhubung singkat, hubungan antara ggl frekuensi slip E2s yang dibangkitkan pada phasa patokan dari rotor patokan dan arus I2s pada phasa tersebut adalah = = = = s 2 s 2 I E s 2
Z = R2+ jSX2 (Ohm)………...…….(2.14)
Dimana
S
Z2 = impedansi bocor rotor frekuensi slip tiap phasa berpatokan pada stator (Ohm)
2
R = tahanan rotor (Ohm)
SX2 = reaktansi bocor patokan pada frekuensi slip (Ohm)
Reaktansi yang didapat pada persamaan (2.14) dinyatakan dalam cara demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2 didefinisikan sebagai harga yang akan
dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
E2s = S E1 (Volt)………...……..(2.15) Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga efektif
I2s = I2 (Ampere)...(2.16)
Dengan membagi persamaan (2.15) dengan persamaan (2.16) didapatkan
s 2 s 2 I E = 2 1 I SE Didapat hubungan = = = = s 2 s 2 I E 2 1 I SE
= R2+ jSX2 (Ohm)………....(2.17)
Dengan membagi persamaan (2.22) dengan S, maka didapat :
2 1 I E = S R2
+ jX2 (Ohm)………..……..(2.18)
Dari persamaan (2.14), (2.15) dan (2.18) maka dapat digambarkan rangkaian ekivalen pada rotor sebagai berikut.
s 2
E E1
2 R 2 SX 2 X S R2 2 R ) 1 S 1 (
R2 −
2
I I2
2 X 2 I 1 E
" ( "
dimana : S R2 = S R2
S
R2
= R2+ 1)
S 1 (
R2 −−−− (Ohm)……….………..….(2.19)
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga phasa pada masing – masing phasanya. Perhatikan gambar di bawah ini :
1 V 1 R 1 X 1 I c
R Xm
Φ
I
c
I Im
2 I 1 E 2 SX 2 I 2 R 2 SE
" ( $
Untuk mempermudah perhitungan maka rangkaian ekivalen pada gambar 2.10 diatas dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga phasa akan dapat digambarkan sebagai berikut.
1 V
1
R X1
c R m X ' 2 X 1 E 1
I I0
c I m I 2 ' I s R2'
Atau seperti gambar berikut.
1
V
1
R X1
c R m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
c I m I 2 ' I ( Dimana: 2 '
X = a2X2
2 '
R = a2R2
Dalam teori transformator-statika, analisis rangkaian ekivalen sering disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena adanya celah udara yang menjadikan perlunya suatu arus peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena reaktansi bocor juga perlu lebih tinggi.
Untuk itu dalam rangkaian ekivalen Rcdapat dihilangkan (diabaikan). Rangkaian ekivalen menjadi gambar berikut.
1
V
1
R X1
m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
2 '
I
2.7 ALIRAN DAYA PADA MOTOR INDUKSI
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
ϕ ϕϕ ϕ
cos I V 3
Pin ==== 1 1 ( Watt )...(2.20)
Dimana :
V1 = tegangan sumber (Volt)
I1 = arus masukan (Ampere)
ϕ = perbedaan sudut phasa antara arus masukan dengan tegangan sumber.
Sebelum daya ditransfer melalui celah udara, motor induksi mengalami rugi-rugi berupa rugi-rugi tembaga stator (PSCL) dan rugi-rugi inti stator (PC). Daya yang ditransfer melalui celah udara (PAG) sama dengan penjumlahan rugi-rugi tembaga rotor (PRCL) dan daya yang dikonversi (Pconv). Daya yang melalui celah udara ini sering juga disebut sebagai daya input rotor.
conv RCL
AG P P
P ==== ++++ (Watt)...(2.21)
(((( ))))
2 2(((( ))))
2 2 22 3 I R
s R I
3 ==== +
(((( ))))
s ) s 1 ( R I
Diagram aliran daya motor induksi dapat dilihat pada Gambar 2.14 di bawah ini.
r oad out τl ϖ
P ====
θ cos . L L in 3V I
P ====
AG
P Pconv
SCL
P
C
P
RCL
P F&W
P SLL
P
$
Dimana :
- PSCL= rugi – rugi tembaga pada kumparan stator (Watt) - PC = rugi – rugi inti pada stator (Watt)
- PAG= daya yang ditranfer melalui celah udara (Watt) - PRCL= rugi – rugi tembaga pada kumparan rotor (Watt) - PF+W= rugi – rugi gesek + angin (Watt)
- PSLL = stray losses (Watt)
- PCONV= daya mekanis keluaran (output) (Watt)
Hubungan antara rugi-rugi tembaga rotor dan daya mekanis dengan daya masukan rotor dinyatakan dengan persamaan sebagai berikut :
(((( ))))
2 AG 22
RCL 3 I R sP
P ==== ==== ( Watt )...(2.23)
(((( ))))
2 AG 22
conv R (1 s)sP
s ) s 1 ( I 3
Dari gambar 2.14 dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek + angin (PF&W), sehingga daya mekanis keluaran sama dengan daya yang dikonversi (Pconv) dikurangi rugi-rugi gesek + angin.
Pout = Pconv – PF&W
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan dalam bentuk slip yaitu :
PAG : PRCL : Pconv = 1 : s : 1 – s ...(2.25)
2.8 EFISIENSI
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanis yang dinyatakan sebagai perbandingan antara masukan dan keluaran atau dalam bentuk energi listrik berupa perbandingan watt keluaran dan watt masukan. Defenisi NEMA terhadap efisiensi energi adalah bahwa efisiensi merupakan perbandingan atau rasio dari daya keluaran yang berguna terhadap daya input total dan biasanya dinyatakan dalam persen. Juga sering dinyatakan dengan perbandingan antara keluaran dengan keluaran ditambah rugi-rugi, yang dirumuskan dalam persamaan (2.26) :
Loss out
out in
loss in in out
P P
P P
P P P P
+ + + + = == = − −− − = == = = = = =
η η η
η ××××100% ...(2.26)
Dari persamaan terlihat bahwa efisiensi motor bergantung pada besar rugi-ruginya. Rugi-rugi pada persamaan tersebut adalah penjumlahan keseluruhan komponen rugi-rugi yang dibahas pada sub bab sebelumnya.
- Mengukur langsung daya elektris masukan dan daya mekanis keluaran - Mengukur langsung seluruh rugi-rugi dan daya masukan
- Mengukur setiap komponen rugi-rugi dan daya masukan,
dimana pengukuran daya masukan tetap dibutuhkan pada ketiga cara di atas. Umumnya, daya elektris dapat diukur dengan sangat tepat, keberadaan daya mekanis yang lebih sulit untuk diukur. Saat ini sudah dimungkinkan untuk mengukur torsi dan kecepatan dengan cukup akurat yang bertujuan untuk mengetahui harga efisiensi yang tepat. Pengukuran pada keseluruhan rugi-rugi ada yang berdasarkan teknik kalorimetri. Walaupun pengukuran dengan metode ini relatif sulit dilakukan, keakuratan yang dihasilkan dapat dibandingkan dengan hasil yang didapat dengan pengukuran langsung pada daya keluarannya.
Kebanyakan pabrikan lebih memilih melakukan pengukuran komponen rugi-rugi secara individual, karena dalam teorinya metode ini tidak memerlukan pembebanan pada motor, dan ini adalah suatu keuntungan bagi pabrikan. Keuntungan lainnya yang sering disebut-sebut adalah bahwa memang benar error pada komponen rugi-rugi secara individual tidak begitu mempengaruhi keseluruhan efisiensi. Keuntungannya terutama adalah fakta bahwa ada kemungkinan koreksi untuk temperatur lingkungan yang berbeda. Biasanya data efisiensi yang disediakan oleh pembuat diukur atau dihitung berdasarkan standar tertentu.
2.9 DISAIN KELAS MOTOR INDUKSI
1. Kelas A : Torsi start normal, arus start normal dan slip kecil
Torsi maksimum biasanya sekitar 200 sampai 300 % dari torsi beban penuh dan terjadi pada slip yang kecil. Penggunaan motor ini antara lain : blower, pompa, mesin bubut dan peralatan mesin lain.
2. Kelas B : Torsi start normal, arus start kecil dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A. Torsi maksimum lebih besar atau sama dengan 200 % dari torsi beban penuh, tetapi kurang dari kelas A karena meningkatnya reaktansi rotor. Penggunaan motor ini sama dengan kelas A, tetapi kelas B lebih disukai karena arus start yang lebih rendah.
3. Kelas C : Torsi start tinggi, arus start rendah dan slip kecil.
Torsi maksimum lebih rendah dari motor kelas A, sementara torsi start mencapai 250 % dari torsi beban penuh. Motor ini dirancang dengan double-cage rotors,
sehingga lebih mahal dari motor-motor kelas sebelumnya. Penggunaan motor ini antara lain compressors dan conveyors.
4. Kelas D : Tosi start tinggi, arus start rendah dan slip tinggi.
Pada dasarnya motor kelas ini sama dengan motor kelas A, tetapi batang rotor dibuat lebih kecil dengan material yang beresistansi tinggi.
BAB III
PENGATURAN KECEPATAN MOTOR INDUKSI TIGA PHASA
3.1 PENGATURAN PUTARAN MOTOR INDUKSI
Motor induksi pada umumnya berputar dengan kecepatan konstan, mendekati kecepatan sinkronnya. Meskipun demikian pada penggunaan tertentu dikehendaki juga adanya pengaturan putaran. Pengaturan putaran motor induksi memerlukan biaya yang tinggi. Biasanya pengaturan ini dapat dilakukan dengan beberapa cara, yaitu dengan mengubah jumlah kutub motor, mengubah frekuensi jala, mengatur tegangan jala-jala, dan mengatur tahanan luar.
3.1.1 MENGUBAH JUMLAH KUTUB MOTOR
Untuk pengaturan putaran dengan cara merubah jumlah kutub, dilakukan dengan merencanakan kumparan stator sedemikian rupa sehingga dapat menerima tegangan sumber dengan sambungan phasa yang berbeda-beda. Dari masing-masing sambungan phasa tersebut dapat di peroleh jumlah kutub yang berbeda-beda pula sehingga jumlah putaran motor berubah. Cara ini dapat dilakukan pada motor induksi dengan rotor sangkar (karena jumlah kutub pada rotor sangkar akan menyesuaikan jumlah kutub dari statornya).
Untuk masing-masing sambungan dapat diperhatikan pada gambar berikut :
( ' & ' &
' & ' &
* # '
Pada pengubahan hubungan kumparan untuk mengubah jumlah kutub dari hubungan seri ke paralel atau sebaliknya, hubungan kumparan pada jaring dapat pula diubah dari Y ke atau sebaliknya. Dengan demikian tegangan yang terpasang pada kumparan-kumparan akan berubah pula yang pada gilirannya mengubah rapat fluks celah udara. Hal ini mengubah karakteristik kopel kecepatan pada pengubahan hubungan tersebut.
3.1.2 MENGATUR FREKUENSI SUMBER
Motor induksi beroperasi dengan kecepatan konstan, mendekati kecepatan sinkronnya dan dari persamaan medan putar pada persamaan 2.3 (ns = 120 f1 /P) diketahui bahwa, kecepatan putaran motor induksi dapat diatur dengan mengatur kecepatan medan putar stator yaitu dengan cara merubah jumlah kutub dan mengatur frekuensi.
((((
))))
s r 1 S nn ==== −−−− ×××× (rpm)...(3.1a)
((((
))))
Pf 120 S 1
n 1
r
× ×× × × ×× × − −− − = = =
= (rpm)...(3.1b)
Dari persamaan terakhir ini, jelas terlihat bahwa perubahan jumlah kutub dan frekuensi akan merubah kecepatan putar motor induksi. Mengatur kecepatan dengan cara mengubah jumlah kutub sudah banyak dilakukan namun daerah pengaturan putaran terbatas dan perubahannya kasar, tetapi cara pengendalian putaran yang halus dan dengan jangkauan putaran yang lebar dapat dilakukan dengan mengatur frekuensi. Karena jumlah kutub ditentukan oleh belitan statornya maka pengubahan jumlah kutub ini hanya bisa dilakukan melalui desain belitan stator motor, sedangkan untuk pengaturan frekuensi memerlukan pengubah frekuensi.
Tapi biasanya pengaturan putaran dengan mengatur frekuensi ini, harus dibarengi dengan pengaturan tegangannya untuk mendapat fluksi yang konstan agar kopel yang dihasilkan tidak berubah.
+ , ( + , (
Gambar 3.3 memperlihatkan karakteristik torsi putaran motor induksi untuk frekuensi yang bervariasi dengan tegangan konstan dan untuk frekuensi yang bervariasi dengan tegangan yang bervariasi.
3.1.3 MENGATUR TEGANGAN INPUT STATOR
Untuk melakukan pengaturan kecepatan dengan daerah pengaturan yang sempit pada motor induksi dapat dilakukan dengan cara menurunkan (mengatur) besarnya tegangan masukan.
Perlu diperhatikan pengaturan kecepatan seperti ini bisa menyebabkan naiknya slip sehingga efisiensi menurun, dengan menurunnya kecepatan dan pemanasan berlebihan pada motor bisa menimbulkan masalah. Pengaturan tegangan untuk mengatur kecepatan dapat diimplementasikan dengan mensuplai kumparan stator dari sisi sekunder autotransformator yang bisa diatur.
& ,
Dari rangkaian ekivalen motor induksi gambar 2.13, dapat diketahui bahwa arus rotor, daya yang ditransfer melalui celah udara dan torsi induksi adalah :
2 1 '
2 Z
E I =
ϕ × × ×
=3 E I cos
P '
s AG ind P ω = τ
Bila Z1 = R1 + jX1 dianggap kecil, maka E1 hampir sama dengan V1.
s 2 1 1 ind cos Z E E 3 ω ϕ × × × = τ 2 s 2 1 ind Z cos E 3 × ω ϕ × × = τ 2 s 2 1 ind Z cos V 3 × × × × × × × × × ×× × = = = = ω ω ω ω ϕ ϕ ϕ ϕ
ττττ (Nm)...(3.2)
Persamaan 3.2 ini, menyatakan bahwa torsi sebanding dengan kuadrat tegangan yang diberikan. Apabila tegangan jaringan diubah, maka karakteristik torsi pun akan berubah, begitu juga dengan kecepatan putarnya. Namun daerah pengaturan sempit.
Karakteristik di bawah ini memperlihatkan dua kecepatan putaran n1 dengan tegangan sumber VS, dan n2 dengan sumber tegangan ½ VS.
( #&
3.1.4 MENGATUR TAHANAN ROTOR
Perbaikan perilaku start motor induksi rotor belitan diperoleh dengan cara menghubungkan tahanan luar secara seri dengan belitan rotor.
$ "
Rn = Tahanan Luar Rotor per phasa
Motor Induksi Rotor Belitan mempunyai belitan kumparan rotor tiga phasa sama dengan kumparan belitan statornya. Kumparan rotor dan stator juga mempunyai jumlah kutub yang sama.
Motor Induksi Rotor Belitan adalah motor induksi yang putarannya dapat diatur dengan tahanan luar yang disisipkan secara seri dengan rangkaian rotor. Perhatikan rangkaian ekivalen motor induksi dibawah ini :
Besarnya slip adalah : 1 2 s r s s r s f f n n n
S ==== −−−− ==== −−−− ====
ω ω ω ω ω ω ω ω ω ω ω ω ...(3.3)
Untuk rangkaian ekivalen motor induksi rotor belitan yang dilihat dari sisi stator, seperti gambar berikut :
)
S
S
1
(
−
" - ( $ " #
Dari rangkaian diatas dan dengan menganggap tahanan dan reaktansi bocor stator kecil, arus I’2 dapat diperoleh :
((((
))))
(((( ))))
' 2 2 2 n ' 2 1 ' 2 X S R R V I + + + + + + + + = = == (Ampere)...(3.4)
Dan
((((
))))
((((
))))
(((( ))))
' 2 2 2 n ' 2 n ' 2 X S R R S R R impedansi tahanan Cos + ++ + + + + + + + + + = == = = = = = ϕ ϕϕϕ ...(3.5)
Maka torsi motor sebagai akibat penambahan tahanan luar adalah :
((((
))))
((((
))))
(((( ))))
' 22 2 2 n ' 2 n ' 2 2 1 S ind X S R R R R S V 3 + + + + + + + + + + + + = = = = ω ωω ω
ττττ (Nm)...(3.6)
karena perubahan nilai tahanan luar. Untuk lebih jelasnya, perhatikan kurva torsi-kecepatan akibat penambahan tahanan luar.
( # ,
Karekteristik torsi-kecepatan menyatakan besarnya tahanan luar untuk menghasilkan torsi mula yang besar disamping untuk membatasi arus mula yang besar pada saat start. Penambahan tahanan luar, tidak mempengaruhi harga torsi maksimum.
3.2 PENGARUH KAPASITOR TERHADAP MOTOR INDUKSI
3.2.1 KAPASITOR SECARA UMUM
merupakan perbandingan dari energi yang disimpan oleh bahan dielektrik dengan energi yang disimpan jika menggunakan udara.
) )
Pemasangan beberapa kapasitor dapat dihubungkan secara seri maupun paralel. seperti gambar berikut :
1
C C2 C3
1
C
2
C
3
C
Bila beberapa kapasitor dihubungkan seri, maka:
3 2
1 V V
V
Karena pada hubungan seri muatan listrik pada semua kapasitor adalah sama, maka: 3 3 2 2 1 1 C Q C Q C Q C Q + + = 3 2 1 C 1 C 1 C 1 C 1 + ++ + + + + + = = =
= ...(3.7)
Bila beberapa kapasitor dihubungkan paralel, maka:
3 2
1 Q Q
Q
Q= + +
Karena pada hubungan paralel tegangan listrik pada semua kapasitor adalah sama, maka:
3 3 2 2 1
1V C V C V
C
CV= + +
3 2 1 C C
C
C ==== ++++ ++++ ...(3.8)
dimana :
V1 , V2 , V3 = Tegangan listrik setiap kapasitor (Volt) Q1 , Q2 , Q3 = Muatan listrik setiap kapasitor (Coulomb) C1 , C2 , C3 = Kapasitansi setiap kapasitor (Farad) V = Total tegangan listrik kapasitor (Volt) Q = Total muatan listrik kapasitor (Coulomb) C = Total kapasitansi kapasitor (Farad)
L I ph I C I ==== ====
3 L V ph V C V ==== ====
3 L I ph I C I ==== ====
L V ph V C V ==== ====
(a) Hubungan Wye (b) Hubungan Delta . Karena : C 1 I V X C C C ω ω ω ω = == = = = =
= (Ohm)...(3.9)
Di dapat nilai kapasitansi kapasitor :
C C V I C ω ω ω ω = = =
= (Farad)...(3.10)
Maka besarnya kapasitansi kapasitor per phasa untuk masing-masing rangkaian adalah :
L L L L V 3 I V 3 I C ω ω ω ω ω ω ω ω ∆ ∆ ∆
∆ ==== ==== (Farad)...(3.11a)
L L L L Y V I 3 3 V I C ω ω ω ω ω ω ω ω = == = = = =
= (Farad)...(3.11b)
Dengan membandingkan CY dan C :
3.2.2 PENAMBAHAN CAPASITOR LUAR
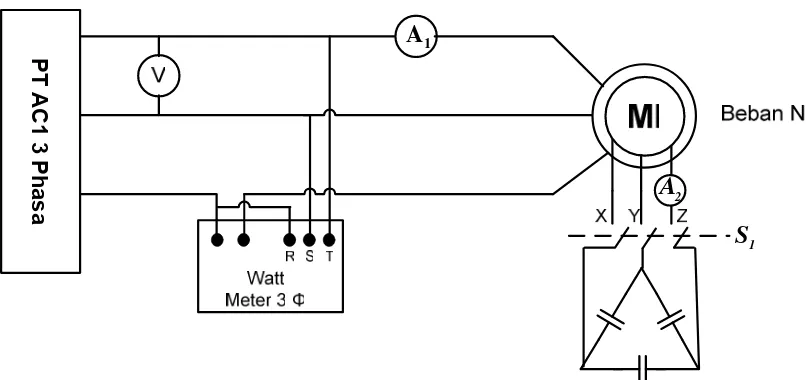
Penambahan kapasitor luar terhadap motor induksi dimana kapasitor dirangkai dalam hubungan delta akan merubah karekteristik motor tersebut, termasuk kecepatan motor induksi. Perhatikan gambar berikut :
&
Hubungan antara frekuensi pada rotor dengan slip yang terjadi adalah :
1 2 S f
f ==== ×××× (Hz)...(3.13a)
Dimana : (S=ns−nr ns) dan (f1 =P×nS 120), substitusikan kedua persamaan
ini kedalam persamaan 3.13.
((((
))))
120 n n P
f s r
2
− − − − × ×× × = = =
= (Hz)...(3.13b)
Maka, kecepatan putar motor induksi adalah :
P f 120 n
n 2
s r
× × × × − − − − = ==
= (rpm)...(3.14)
3 2 I ph I C
I ==== ====
2 V ph V C
V ==== ====
2 I
Dari persamaan (3.9), dimana = 2 fkita dapatkanbesarnya nilai frekuensi pada rotor, yaitu :
C 2 X 1 f C 2 × × × × × ×× × × ×× × = = = = π π π
π (Hz)...(3.15)
Dengan mensubstitusikan persamaan 3.15 kedalam persamaan 3.14, didapatlah persamaan sebagai berikut :
C 2 X P 120 n n C s r × × × × × × × × × × × × × × × × − − − − = == = π π π
π (rpm)...(3.16)
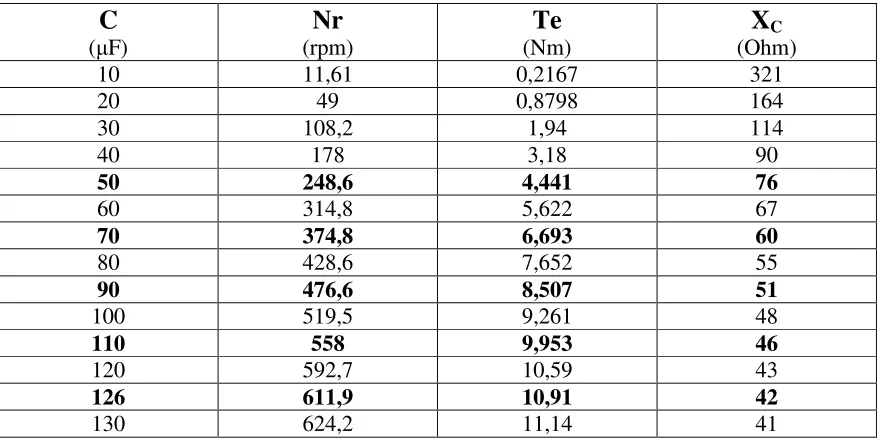
Persamaan ini menyatakan bahwa, penambahan kapasitor luar pada motor akan merubah nilai kecepatan motor.
Karena reaktansi kapasitif (XC) merupakan fungsi frekuensi maka nilai reaktansi berubah-ubah seiring dengan perubahan frekuensi rotor. Reaktansi kapasitif yang di berikan pada rotor motor adalah :
C f 2 1 C 1 X 2 C × × × × × × × × × ×× × = == = = = = = π π π π ω ω ω
ω (Ohm)...(3.17a)
C f S 2 1 X 1 C × ×× × × × × × × × × × × × × × = = = = π ππ
π (Ohm)...(3.17b)
C S 1 XC × × × × × × × × = = = = ω ω ω
ω (Ohm)...(3.17c)
Maka kecepatan motor, karena penambahan kapasitor luar adalah :
C X
1 S
C×××× ××××
= == =
ω ωω
ω ...(3.18)
((((
))))
s r 1 S nn ==== −−−− ×××× (rpm)...(3.19)
Penambahan capasitor luar terhadap motor induksi akan merubah karekteristik motor tersebut, termasuk karekteristik torsi-kecepatan motor induksi.
Perhatikan gambar berikut :
2 R 2 SX 2 R 2 R 2 SX 2 SX &
Berdasarkan rangkaian diatas, dapat dibuat model rangkaian ekivalen per-phasa motor induksi dengan penambahan kapasitor luar.
1 V + + + + − − − − 1
jX R1
M jX 2 jX S R2 1 E C jX − −− − 2 I 1 I 1 V + + + + − − − −
Dengan menggunakan rangkaian ekivalen motor induksi dan aliran daya motor kita mendapatkan persamaan umum untuk torsi induksi sebagai fungsi kecepatan. Torsi induksi dari suatu motor induksi diberikan oleh persamaan berikut.
r conv ind P ω ωω ω
ττττ ====
(Nm)...(3.20a)
s AG ind P ω ω ω ω
ττττ ==== (Nm)...(3.20b)
Persamaan terakhir ini sangat bermanfaat, kecepatan sinkron adalah konstan untuk frekuensi dan jumlah kutub yang diberikan. Karena s konstant, daya celah udara akan menghasilkan / sebanding dengan torsi induksi.
Daya celah udara merupakan daya pada celah yang berasal dari rangkaian stator ke rangkaian rotor. Ini sepadan dengan daya yang diserap oleh resistansi R2/S.
1 V + + + + − − − − 1
I jX1 R1
M
jX
2
I j(X X )
C 2−−−−
S R2 × ×× × × × × × 1 E
" ( #
Dengan mengacu pada rangkaian ekivalen diatas, jika I2 diketahui maka rugi-rugi daya dan torsi motor induksi dapat ditentukan.
Rugi-rugi Tembaga Stator dari rangkaian diatas adalah :
1 2 1 SCL 3I R
P ==== ...(3.21)
SCL in AG P P
P ==== −−−− ...(3.22)
Daya celah udara juga dapat ditentukan dengan persamaan berikut :
S R I 3
P 2 2
2
AG ==== ...(3.23)
Rugi-rugi Tembaga Rotor dari rangkaian diatas adalah :
2 2 2 RCL 3I R
P ==== ...(3.24)
Setelah mengetahui rugi-rugi tembaga dan daya celah udara, kita dapat menentukan besarnya daya yang dirubah dari energi listrik menjadi energi mekanik atau yang sering disebut sebagai daya mekanik, yang besarmya adalah :
AG CONV (1 S)P
P ==== −−−− ...(3.25)
S AG r
conv ind
P P
ω ω ω ω ω ω ω ω
ττττ ==== ==== ...(3.26)
Torsi induksi ( ind) dari suatu mesin merupakan torsi yang dihasilkan dari pengubahan daya listrik menjadi energi mekanik, yang nilainya dapat ditentukan dari persamaan diatas.
1
V
1
jX R1
M
jX
TH
V
( +*
1
jX R1
M
jX
( /*
TH
V E1
TH
R jXTH
× × × ×
× × × ×
) X X (
j 2−−−− C
S
R2
* (
M 1
M 1 TH
Z Z
Z V V
+ =
M 1 1
M 1
jX jX R
jX V
Besarnya tegangan thevenin adalah : 2 M 1 2 1 M 1 TH ) X X ( R X V V + + + + + + + + = ==
= (Volt)...(3.27)
Pada gambar 3.17b, sumber tegangan phasa telah di hubung-singkat dan kedua impedansi terhubung parallel.
TH TH M 1 1 1 1 M
TH R jX
) X X ( j R ) jX R ( jX
Z ==== ++++
+ + + + + ++ + + + + + = ==
= (Ohm)...(3.28)
Karena XM >> X1 dan XM + X1 >> R1, resistansi dan reaktansi thevenin adalah : 2 M 1 M 1 TH X X X R R + ++ + ≈ ≈ ≈
≈ (Ohm)...(3.29)
1 TH X
X ≈≈≈≈ (Ohm)...(3.30)
Dari rangkaian ekivalen 3.17c, dapat ditentukan besarnya arus I2 yang mengalir pada rangkaian thevenin dan torsi motor.
2 TH TH 2 Z Z V I + = C 2 TH 2 TH TH jX jX jX S R R V − + + + =
((((
))))
2 C 2 TH 2 2 TH TH 2 X X X S R R V I − −− − + + + + + ++ + + ++ + = = == (Ampere)...(3.31)
Dari persamaan 3.20b, persamaan 3.23 dan persamaan 3.31, didapatlah pengaruh reaktansi kapasitif terhadap torsi motor.
((((
++++ −−−−))))
+ + + + + + + + = = = = 2 C 2 TH 2 2 TH S 2 2 TH ind X X X S R R S R V 3 ω ωω ωBAB IV
PENGUJIAN DAN HASIL PENGUKURAN
4.1 Umum
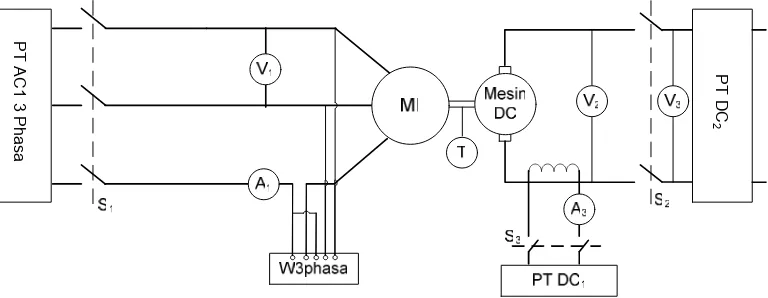
Untuk mendapatkan parameter dari rangkaian ekivalen motor induksi tiga phasa, maka dapat dihitung dari data yang didapat dari percobaan beban nol, rotor tertahan ( block rotor ), dan percobaan tahanan DC. Pada percobaan beban nol dimana tidak ada beban yang terhubung pada poros rotor sehingga putaran rotor dikatakan maksimum. Percobaan rotor tertahan (block rotor ) harus dilakukan jauh dibawah keadaan nominal, karena dengan tegangan stator yang kecil sudah menghasilkan arus yang besar pada rotor. Dipercobaan rotor tertahan putaran rotor dikatakan dalam keadan minimum (nr= 0 ). Untuk percobaan tahanan DC dimana pada percobaan ini akan mengukur besarnya tahanan pada kumparan motor.
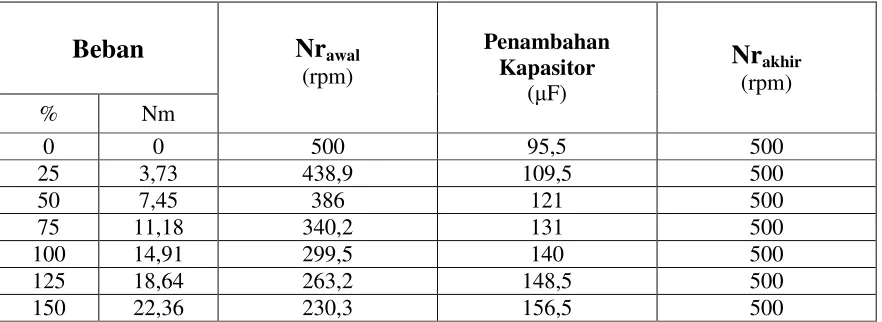
Percobaan penggunaan kapasitor luar dilakukan untuk mengetahui pengaruh penambahan kapasitor terhadap kecepatan motor induksi. Percobaan ini dilakukan dengan mengubah-ubah nilai kapasitor yang dirangkai pada kumparan rotor motor.
4.2 Peralatan Yang Digunakan
Peralatan yang digunakan dalam percobaan ini adalah: 1. motor induksi tiga phasa
tipe : rotor belitan
spesifikasi motor: - AEG Typ C AM 112 MU 4 RI - /Y 220/380 V 10,7 / 6,2 A - 2,2 Kw, cos 0,67
- 1410 rpm, 50 Hz - isolasi B
5. Sumber tegangan AC dan DC
6. Kapasitor Luar, dengan nilai 50 F, 70 F, 90 F, 110 F dan 126 F.
4.3 Percobaan Untuk Mendapatkan Parameter Motor Induksi
Untuk dapat menentukan parameter motor induksi tiga phasa jenis rotor belitan, maka dapat dilakukan dengan percobaan berikut ini: