ANALISA PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN MOTOR INDUKSI
TIGA PHASA ROTOR BELITAN
Aplikasi Pada Pusat Pengembangan Dan Pemberdayaan Pendidik Dan Tenaga Kependidikan (P4TK) Medan
OLEH :
NAMA : FAUZAN Z NASUTION NIM : 07 0402 061
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ANALISA PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN DINAMIK MOTOR INDUKSI
TIGA PHASA ROTOR BELITAN
Aplikasi Pada Pusat Pengembangan Dan Pemberdayaan Pendidik Dan Tenaga Kependidikan (P4TK) Medan
Oleh :
NAMA : FAUZAN Z NASUTION NIM : 07 0402 061
Tugas akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 12 bulan Desember tahun 2012 di depan penguji : 1) Ir. Panusur SM.L Tobing : Ketua Penguji : ……… 2) Ir. Surya Tarmizi Kasim, M.Si : Anggota Penguji : ……… 3) Ir. Zulkarnaen Pane : Anggota Penguji : ………
Disetujui Oleh : Pembimbing Tugas Akhir
(Ir. Eddy Warman NIP : 19541120 198003 1 003
)
Diketahui oleh :
Ketua Departemen Teknik Elektro FT USU
ANALISA PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN DINAMIK MOTOR INDUKSI
TIGA PHASA ROTOR BELITAN
Aplikasi Pada Pusat Pengembangan Dan Pemberdayaan Pendidik Dan
Tenaga Kependidikan (P4TK) Medan
Oleh :
NAMA : FAUZAN Z NASUTION NIM : 07 0402 061
Tugas akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 19 bulan Desember tahun 2012 di depan penguji : 1) Ir. Panusur SM.L Tobing : Ketua Penguji
2) Ir. Surya Tarmizi Kasim, M.Si : Anggota Penguji 3) Ir. Zulkarnaen Pane : Anggota Penguji
Diketahui oleh : Disetujui Oleh :
Ketua Departemen Teknik Elektro Pembimbing Tugas Akhir
(Ir. Surya Tarmizi Kasim, M.Si) (Ir. Eddy Warman
KATA PENGANTAR
Segala puji syukur penulis haturkan kehadirat Allah SWT yang telah memberikan kemampuan dan ketabahan dalam menghadapi segala cobaan, halangan dan rintangan dalam menyelesaikan Tugas Akhir ini, serta shalawat beriring salam penulis hadiahkan kepada Nabi Muhammad SAW.
Tugas akhir ini penulis persembahkan kepada yang teristimewa yaitu Ayahanda ( Drs. Rosehat Nasution ) dan Ibunda ( Elmi Zuhriah Hasibuan ), yang telah mendukung dan mendoakan dari penulis hingga sekarang, dan rasa sayang saya saya haturkan kepada saudara-saudara saya Muhammad Anshari Nasution, Nuril Islami Nasution, Riskina Mulyani Nasution Salman Setiawan Nasution.
Tugas akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Universitas Sumatera Utara. Adapun judul Tugas Akhir ini adalah :
ANALISA PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN DINAMIK MOTOR
INDUKSI TIGA ROTOR BELITAN
1. Bapak Ir. Surya Tarmizi Kasim Msi dan Bapak Rachmad Fauzi, ST, MT selaku Ketua dan Sekretaris Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
2. Bapak Ir. Zulkarnaen Pane selaku dosen wali penulis yang senantiasa memberikan bimbingan selama perkuliahan.
3. Bapak Ir. Eddy Warman selaku Dosen Pembimbing yang dengan sabar dan tulus meluangkan waktu dan pikiran untuk membimbing penulis dalam menyelesaikan Tugas Akhir ini.
4. Seluruh Staf Pengajar yang telah memberi bekal ilmu kepada penulis dan seluruh Pegawai Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara atas bantuan administrasinya.
5. Sahabat – sahabat terbaikku dikampus, Ali Sahbana Hrp, Recky Suharmon, Ahmad Muhajir, Fachry, Habibi, Reza, Irham, Indra, Surya , Tony Andrian, Oki, Ardi, hanry, Luki itsardi, Nobel, Benito, dan semua teman – teman Elektro ’07 yang tidak mungkin disebutkan satu persatu.
6. Sahabat – Sahabat terbaikku di tim DW, Dina MSS, Sukma Faizah, Nina Apriani, Deni Rafli, Recky, Iqbal damanik, Bang Ridho, Bang Faizal, Kak Rena, kak widie, kak wina, kak vana.
7. Terkhusus buat Khodri Ibrahim Nasution.
8. Buat Bayu, Sigit, Andika, Rumi, Zuhdi Mahendra, Arif Tri, Ichsan Lubis, Rozi, Adriansyah, Abdul Ghofur, Rahmat Fajar, Patria bowo, Ryan, Azan. 9. Buat anak – anak SMART Ekselensia Indonesia Medan, buat anak – anak
10. Buat Tim saya di SMK TELKOM SANDYPUTRA Medan, buat anak – anak asrama putra Ihsan nasty, Muslimin, Hamdan, Bang Hendry, Cirin.
11. Buat pengurus UKMI Ad-Dakwah periode 2011 semuanya yang saya cintai.
12. Semua abang dan kakak senior serta adik junior yang telah mau berbagi pengalaman dan motivasi kepada penulis.
13. Dan pihak - pihak yang tidak dapat penulis sebutkan satu persatu.
Akhir kata penulis menyadari bahwa tulisan ini masih banyak kekurangannya. Kritik dan saran dari pembaca untuk menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan. Semoga Tugas Akhir ini dapat memberi manfaat khususnya bagi penulis pribadi maupun bagi semua yang membutuhkannya dan hanya kepada Allah SWT – lah penulis menyerahkan diri.
Medan, 5 Oktober 2012
ABSTRAK
Pengereman dinamik motor induksi rotor belitan dapat dilakukan dengan sistem pengereman mekanis dan elektrodinamik. Pada sistem elektrodinamik dapat dibedakan atas beberapa metode diantaranya pengereman regeneratif,
plugging dan dinamik. Pada metode dinamik dapat menggunakan sumber arus searah atau kapasitor.
Pada motor induksi tiga fasa terkadang batangan yang rusak pada cangkang rotor dapat menyebabkan belitan motor yang tidak seimbang, dan juga belitan pada rotor dapat dilengkapi dengan resistansi eksternal 3 fasa yang mungkin belum seimbang. Hal ini memberikan pengaruh terhadap torsi dan putaran motor tersebut. Pada rotor jenis belitan dapat dirancang dengan menambahkan tahanan luar untuk mendapatkan tahanan rotor yang tidak seimbang.
Pada tugas akhir pengaruh tahanan rotor tak seimbang terhadap pengereman dinamik motor induksi tiga fasa rotor belitan ini, menggunakan kapasitor minimum 17,35 μF untuk motor dengan kapasitas 1,1 KW dan faktor
daya 0,71. Tahanan yang digunakan masing – masing 20 Ω dengan tahanan tak seimbang konfigurasi 26,4 Ω, 31,3 Ω, 37,7 Ω. Waktu tercepat pengereman
diperoleh sebesar 3,69 sekon dan waktu terlama pengereman diperoleh sebesar 3,95 sekon.
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xiv
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan dan Manfaat Penulisan ... 2
1.3 Batasan Masalah ... 2
1.4 Metode Penulisan ... 3
1.5 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI TIGA PHASA 2.1 Umum ... 6
2.2 Konstruksi Motor Induksi Tiga Phasa ... 6
2.2.1 Stator ... 7
2.2.2 Rotor ... 8
2.3 Medan Putar ... 11
2.3.1 Analisis Secara Vektor ... 12
2.4 Prinsip Kerja Motor Induksi Tiga Phasa ... 13
2.5 Rangkaian Ekivalen Motor Induksi ... 16
2.5.2 Rangkaian Ekivalen Rotor ... 18
2.6 Aliran Daya Motor Induksi ... 22
2.7 Torsi Motor Induksi tiga Phasa ... 25
2.8 Efisiensi Motor Induksi Tiga Phasa ... 29
2.9 Disain Motor Induksi Tiga Phasa ... 29
2.9 Penentuan Parameter Motor Induksi ... 30
2.9.1 Pengujian Tanpa Beban... 31
2.9.2 Pengujian Tahanan Stator ... 32
2.9.3 Pengujian Rotor Tertahan ... 33
BAB III TEORI KOMPONEN SIMETRIS DAN TORSI MOTOR INDUKSI TIGA FASA DENGAN TAHANAN ROTOR TAK SEIMBANG 3.1 Teori Komponen Simetris ... 36
3.2 Operator “a” ... 39
3.3 Komponen Simetris dari Fasor Tak Simetris ... 40
3.4 Torsi Motor Induksi Tiga Fasa Dengan Tahanan Rotor Yang Tidak Seimbang ... 43
BAB IV PENGEREMAN PADA MOTOR INDUKSI TIGA PHASA 4.1 Umum ... 49
4.2 Sistem Pengereman Mekanis ... 50
4.3 Sistem Pengereman Elektrodinamik ... 50
4.3.1 Pengereman Regeneratif ... 51
4.3.2 Pengereman Plugging ... 51
4.3.3.1 Pengereman Dinamik Dengan Sumber
Arus Searah ... 53
4.3.3.2 Pengereman Dinamik Dengan Kapasitor ... 55
A. Prinsip Kerja ... 55
B. Timbulnya Penguatan Sendiri dan Rangkaian Ekivalen ... 56
C. Kapasitor ... 61
4.4 Sistem Pengereman Elektrodinamik ... 62
BAB V PERCOBAAN PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN DINAMIK MOTOR INDUKSI TIGA FASA ROTOR BELITAN 5.1 Umum ... 63
5.2 Peralatan Yang Digunakan ... 63
5.3 Percobaan Menentukan Parameter Motor induksi Tiga phasa ... 64
5.3.1 Percobaan Hubung Singkat ( block rotor ) ... 64
5.3.1.1 Rangkaian Percobaan ... 64
5.3.1.2 Prosedur Percobaan ... 64
5.3.1.3 Data Hasil Percobaan ... 65
5.3.1.4 Analisa Data Hasil Percobaan ... 65
5.3.2 Percobaan Beban Nol ... 67
5.3.2.1 Rangkaian Percobaan ... 67
5.3.2.2 Prosedur Percobaan ... 67
5.3.2.4 Analisa Data Hasil Percobaan ... 68
5.3.3 Percobaan Pengukuran Tahanan Stator (DC test ) ... 69
5.3.3.1 Rangkaian Percobaan ... 69
5.3.3.2 Prosedur Percobaan ... 69
5.3.3.3 Data Hasil Percobaan ... 69
5.3.3.4 Analisa Data Hasil Percobaan ... 68
5.3.4 Percobaan Pengukuran Tahanan Rotor (DC test ) ... 69
5.3.4.1 Rangkaian Percobaan ... 69
5.3.4.2 Prosedur Percobaan ... 69
5.3.4.3 Data Hasil Percobaan ... 69
5.3.3.4 Analisa Data Hasil Percobaan ... 70
5.4. Penentuan Besar Kapasitor Minimum Untuk Pengereman Dinamis ... 72
5.5 Percobaan Pengaruh Tahanan Rotor Tak Seimbang Terhadap Pengereman Dinamik Motor Induksi Tiga Fasa Rotor Belitan …….73
5.5.1 Rangkaian Percobaan Pengereman Motor Induksi Tiga Fasa Tanpa Kapasitor ... 73
5.5.2 Rangkaian Percobaan Pengereman Motor Induksi Tiga Fasa Dengan Tahanan Rotor Tak Seimbang ... 74
5.5.3 Prosedur Percobaan ... 74
5.5.4 Data Hasil Percobaan ... 76
5.5.5 Analisa Data Hasil Percobaan ... 76
5.5.5.2 Analisa Data ... 77
BAB VI PENUTUP
6.1 Kesimpulan ... 85 6.2 Saran ... 85
DAFTAR GAMBAR
Gambar 2.1 Penampang Stator dan Rotor Motor Induksi Tiga Fasa………….7
Gambar 2.2 Komponen Stator Motor Induksi Tiga Fasa (a) Lempengan Inti, (b) Tumpukan Inti Dengan Kertas Isolasi Pada Beberapa Alurnya, (c) Tumpukan Inti dan Kumparan dalam Cangkang Stator. ... 8
Gambar 2.3 (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan(b) Motor Induksi Tiga Fasa Rotor Belitan ... 9
Gambar 2.4 Skematik Diagram Motor Induksi Rotor Belitan ... 9
Gambar 2.5 (a) Rotor Sangkar Tupai dan Bagian-bagiannya (b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai ... 10
Gambar 2.6 (a) Diagram phasor fluksi tiga phasa (b) Arus Tiga Phasa Setimbang ... 11
Gambar 2.7 Medan Putar Pada Motor Induksi Tiga Phasa ... 12
Gambar 2.8 Arah Fluks Yang Ditimbulkan Oleh Arus Yang Mengalir Dalam Suatu lingkar ... 12
Gambar 2.9 Diagram Vektor Untuk Fluks Total Pada Keadaan t1, t2, t3, t4 Gambar 2.10 Rangkaian Ekivalen Stator Motor Induksi ... 16
... 13
Gambar 2.11 Rangkaian Ekivalen Pada Rotor Motor Induksi ... 19
Gambar 2.12 Rangkaian Ekivalen Pada Motor Induksi Tiga Phasa ... 20
Gambar 2.13 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 20
Gambar 2.14 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 21
Gambar 2.15 Rangkaian Ekivalen Lain Dari Motor Induksi ... 22
Gambar 2.16 Diagram Aliran Daya Motor Induksi ... 24
Gambar 2.18 Impedansi Ekivalen Thevenin Pada Sisi Rangkaian Input ... 27
Gambar 2.19 Rangkaian Ekivalen Thevenin Motor Induksi ... 27
Gambar 2.20 Hubungan Antara Torsi Dan Slip Motor Induksi ... 28
Gambar 2.21 Efisiensi Pada Motor Induksi ... 30
Gambar 2.22 Rangkaian Pengujian Tanpa Beban Motor Induksi ... 31
Gambar 2.23 Rangkaian Pengujian Tahanan Stator Arus Searah Motor Induksi 32 Gambar 2.24 Rangkaian Rotor Ditahan Motor Induksi ... 34
Gambar 3.1 Tiga Himpunan fasor seimbang yang merupakan komponen simetris dari tiga fasor tak seimbang ... 38
Gambar 3.2 Penjumlahan secara grafis komponen – komponen pada gambar 3.1 untuk mendapatkan tiga fasor tak seimbang ... 38
Gambar 3.3 Diagram Fasor berbagai pangkat dari operator a ... 40
Gambar 3.4 Motor induksi dengan belitan rotor tak seimbang ... 44
Gambar 3.5 Kurva Torsi terhadap Slip ... 48
Gambar 4.1 Arah Putaran Medan Putar Stator Dan Putaran Rotor Pada Saat Pengereman Plugging: (A) Sebelum Pengereman : (B) Selama Proses Pengereman: (C) Setelah Pengereman Bila Saat Nr Pembalikan Phasa Tidak Dilepas Dari Sumber ... 52
= 0, Gambar 4.2 Rangkaian Pengereman Dinamik Motor Induksi Tiga Phasa. (a) Penguatan Berasal Dari Baterai, (B) Penguatan Berasal Dari Sumber Jala- Jala Yang Disearahkan ... 54
Karakteristik Arus - Tegangan Capacitor Bank , Semakin Besar Nilai Kapasitor (c ) Maka Arus yang Ditimbulkan Semakin
Besar ... 57
Gambar 4.5 Karakteristik Hubungan Antara Arus Penguata Dengan Tegangan ... 58
Gambar 4.6 Kurva Nilai Kapasitansi Terhadap Pembangkitan Tegangan. ... 59
Gambar 4.7 Rangkaian Ekivalen Pengereman Dinamik Dengan Kapasitor ... 60
Gambar 5.1 Rangkaian Percobaan Hubung Singkat ... 64
Gambar 5.2 Rangkaian Percobaan Beban Nol ... 67
Gambar 5.3 Rangkaian Percobaan Tahanan DC Pada Stator ... 69
Gambar 5.4 Rangkaian Percobaan Tahanan DC Pada Rotor ... 71
Gambar 5.5 Rangkaian Percobaan Pengereman motor induksi 3fasa tanpa kapasitor ………73
Gambar 5.6 Percobaan pengereman motor induksi tiga fasa dengan tahan rotor . tak seimbang ... 74
Gambar 5.7 Grafik Karakteristik Pengereman Dinamik nr tahanan rotor tak seimbang……….83
(rpm) vs t(s) Pada Gambar 5.8 Grafik Karakteristik Pengereman Dinamik R vs t(s) Pada Tahanan Terhubung Y ... 83
Gambar 5.9 Grafik Karakteristik Pengereman Dinamik Torsi vs Slip………..84
DAFTAR TABEL
Tabel 2.1 Standar Besarnya Reaktansi Berbagai Jenis Desain Rotor ... 35
Tabel 5.1 Data Hasil Percobaan Hubung Singkat ... 65
Tabel 5.2 Data Hasil Percobaan Beban nol ... 68
Tabel 5.3 Data Hasil Percobaan Tahanan DC pada stator ... 69
Tabel 5.4 Data Hasil Percobaan Tahanan DC pada rotor ... 71
Tabel 5.5 Data Hasil Percobaan Pengereman tanpa kapasitor ... 76
Tabel 5.6 Data Hasil Percobaan Pengereman Dengan Tahanan Rotor Seimbang……….76
ABSTRAK
Pengereman dinamik motor induksi rotor belitan dapat dilakukan dengan sistem pengereman mekanis dan elektrodinamik. Pada sistem elektrodinamik dapat dibedakan atas beberapa metode diantaranya pengereman regeneratif,
plugging dan dinamik. Pada metode dinamik dapat menggunakan sumber arus searah atau kapasitor.
Pada motor induksi tiga fasa terkadang batangan yang rusak pada cangkang rotor dapat menyebabkan belitan motor yang tidak seimbang, dan juga belitan pada rotor dapat dilengkapi dengan resistansi eksternal 3 fasa yang mungkin belum seimbang. Hal ini memberikan pengaruh terhadap torsi dan putaran motor tersebut. Pada rotor jenis belitan dapat dirancang dengan menambahkan tahanan luar untuk mendapatkan tahanan rotor yang tidak seimbang.
Pada tugas akhir pengaruh tahanan rotor tak seimbang terhadap pengereman dinamik motor induksi tiga fasa rotor belitan ini, menggunakan kapasitor minimum 17,35 μF untuk motor dengan kapasitas 1,1 KW dan faktor
daya 0,71. Tahanan yang digunakan masing – masing 20 Ω dengan tahanan tak seimbang konfigurasi 26,4 Ω, 31,3 Ω, 37,7 Ω. Waktu tercepat pengereman
diperoleh sebesar 3,69 sekon dan waktu terlama pengereman diperoleh sebesar 3,95 sekon.
BAB I PENDAHULUAN
1.1 Latar Belakang
Dewasa ini pada umumnya industri memerlukan motor sebagai penggerak, adapun motor yang sering digunakan adalah motor induksi,karena konstruksinya yang sederhana, kuat dan lebih murah jika dibandingkan dengan motor jenis lain. Pada suatu kondisi tertentu motor harus dapat dihentikan segera. Beberapa aplikasi motor yang memerlukan pengereman misalnya : kereta api, kereta rel listrik, conveyor, katrol dan lain-lain.
Pada motor induksi tiga phasa,ada 2 jenis rotor yang digunakan yaitu rotor sangkar dan rotor belitan. Pada rotor belitannya dapat dilengkapi dengan resistansi eksternal 3 phasa. Hal ini memberikan pengaruh terhadap torsi dan putaran motor tersebut. Begitu juga pada statornya, dalam proses pengereman dinamik ini rangkaian stator dihubungkan dengan kapasitor,maka akan timbul arus penguatan sehingga membangkitkan kopel yang berlawanan arah dengan putaran rotor,dengan demikian akan mempengaruhi proses pengereman sampai berakhirnya proses pengereman.
Setelah proses penguatan sendiri berakhir,tegangan dan arus penguatan akan turun cepat karena pengaruh resistansi dan tegangan induksi yang relatif semakin kecil.
1.2 Tujuan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah untuk mengetahui pengaruh tahanan rotor tak seimbang terhadap pengereman dinamik motor induksi tiga phasa rotor belitan. Dan manfaat dari penulisan tugas akhir ini adalah mendapatkan pengertian dan penjelasan mengenai pengaruh tahanan rotor yang tidak seimbang terhadap pengereman d i n a m i k dan memberikan kesempatan bagi mahasiswa lain untuk mempelajari lebih lanjut.
1.3 Batasan Masalah
Agar isi dan pembahasan tugas akhir ini menjadi terarah dan dapat mencapai hasil yang diharapkan, maka penulis perlu membuat batasan masalah yang akan dibahas. Adapun batasan masalah pada penulisan tugas akhir ini adalah sebagai berikut :
1. Hanya menganalisa pengaruh tahanan rotor tak seimbang terhadap pengereman dinamik motor induksi tiga phasa rotor belitan.
2. Motor yang digunakan adalah motor induksi tiga phasa yang terdapat di P4TK.
3. Tidak membahas tentang pengaturan
4. Analisa dilakukan dalam kondisi steady state. 5. Motor induksi tiga fasa beroperasi sendiri. 6. Rugi inti, gesek dan angin diabaikan.
7. Tidak membahas gangguan yang terjadi pada motor induksi
9. Tidak membahas rugi-rugi pada pengereman dinamik. 10. Tidak membahas masalah starting pada motor induksi.
1.4 Metode Penulisan
Metode yang digunakan dalam penulisan tugas akhir ini adalah: 1. Studi literatur
Yaitu dengan mempelajari buku referensi, jurnal, artikel dari internet, dan bahan kuliah yang mendukung dan berkaitan dengan topik tugas akhir ini. 2. Studi Bimbingan
Yaitu berupa tanya jawab dengan dosen pembimbing, asisten Laboratorium Konversi Energi Listrik Departemen Teknik Elektro dan teman-teman sesama mahasiswa mengenai masalah-masalah yang timbul selama penulisan tugas akhir ini berlangsung.
3. Studi Lapangan
Melakukan percobaan di Laboratorium Pusat Pengembangan Dan Pemberdayaan Pendidik Dan Tenaga Kependidikan (P4TK) Medan.
1.5 Sistematika Penulisan
Untuk memberikan gambaran terhadap Tugas Akhir ini, maka penulis menyusun sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
BAB II MOTOR INDUKSI TIGA PHASA
Bab ini membahas mengenai motor induks i tiga phasa secara umum, konstruksi motor induksi tiga phasa, prinsip kerja motor induksi tiga phasa, medan putar, slip, rangkaian ekivalen motor induksi, desain motor induksi tiga fasa, aliran daya pada motor induksi, efisiensi motor induksi tiga phasa, parameter motor induksi.
BAB III KOMPONEN SIMETRIS DAN TORSI MOTOR INDUKSI TIGA FASA DENGAN TAHANAN ROTOR TIDAK SEIMBANG Bab ini membahas mengenai komponen simetris dan torsi pada motor induksi tiga fasa dengan tahanan rotor yang tidak seimbang.
BAB IV PENGEREMAN PADA MOTOR INDUKSI TIGA PHASA
Bab ini membahas tentang teori umum pengereman pada motor induksi,membahas tentang sistem pengereman,pengereman mekanis,pengereman dinamik, timbulnya penguatan sendiri dan rangkaian ekivalen,membahas tentang kapasitor.
BAB V PENGARUH TAHANAN ROTOR TAK SEIMBANG TERHADAP PENGEREMAN DINAMIK MOTOR INDUKSI TIGA PHASA ROTOR BELITAN
melaksanakan percobaan pada generator induksi di Pusat Pengembangan Dan Pemberdayaan Pendidik Dan Tenaga Kependidikan (P4TK) Medan.
BAB VI KESIMPULAN DAN SARAN
BAB II
MOTOR INDUKSI TIGA PHASA
2.1 Umum
Motor induksi merupakan motor arus bolak–balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai.
2.2 Konstruksi Motor Induksi Tiga Phasa
sampai 4 mm.
Gambar 2.1. Penampang Stator dan Rotor Motor Induksi Tiga Fasa
2.2.1 Stator
(a) (b) (c)
Gambar 2.2. Komponen Stator Motor Induksi Tiga Fasa : a) Lempengan Inti,
b) Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya, c) Tumpukan Inti dan Kumparan dalam Cangkang Stator.
2.2.2 Rotor
Berdasarkan jenis rotornya, motor induksi tiga fasa dapat dibedakan menjadi dua jenis, yang juga akan menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel cage rotor). Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor (gambar 2.3(a)). Belitan-belitan rotor ini kemudian dihubung singkatkan melalui sikat
(a) (b) Gambar 2.3.
a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan b) Motor Induksi Tiga Fasa Rotor Belitan
Gambar 2.4. Skematik Diagram Motor Induksi Rotor Belitan
Rotor sangkar mempunyai kumparan yang terdiri atas beberapa batang konduktor yang disusun sedemikian rupa hingga menyerupai sangkar tupai. Rotor terdiri dari tumpukan lempengan besi tipis yang dilaminasi dan batang konduktor yang mengitarinya (perhatikan gambar 2.5(a)). Tumpukan besi yang dilaminasi disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring)
atau disebut juga dengan end ring.
(a) (b)
Gambar 2.5.
a) Rotor Sangkar Tupai dan Bagian-bagiannya b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
2.3 Medan Putar
Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3. Hubungan dapat berupa hubungan bintang atau delta.
Misalkan kumparan a – a; b – b; c – c dihubungkan 3 fasa, dengan beda fasa masing-masing 1200 (gambar 2.6a) dan dialiri arus sinusoid. Distribusi arus
ia, ib, ic sebagai fungsi waktu adalah seperti gambar 2.6b. Pada keadaan t1, t2, t3,
dan t4
Pada t
, fluks resultan yang ditimbulkan oleh kumparan tersebut masing-masing adalah seperti gambar 2.6c, d, e, dan f.
1 fluks resultan mempunyai arah sama dengan arah fluks yang
dihasilkan oleh kumparan a – a; sedangkan pada t2, fluks resultannya mempunyai
arah sama dengan arah fluks yang dihasilakan oleh kumparan c – c; dan untuk t3
fluks resultan mempunyai arah sama dengan fluks yang dihasilkan oleh kumparan
b – b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang
dihasilkan pada saat t1 keterangan ini akan lebih jelas pada analisa vektor.
Gambar 2.6. (a) Diagram Phasor Fluksi Tiga Phasa (b) Arus Tiga Phasa Setimbang
Gambar 2.7. Medan putar pada motor induksi tiga phasa
Dari gambar c, d ,e, dan f tersebut terlihat fluks resultan ini akan berputar satu kali. Oleh karena itu untuk mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron dapat diturunkan sebagai berikut :
ns
p f . 120 =
ns
f = frekuensi (Hz)
= kecepatan sinkron (rpm)
p = jumlah kutub
2.3.1 Analisis Secara Vektor
Analisis secara vektor didapatkan atas dasar:
1. Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar, sesuai dengan perputaran sekrup (gambar 2.8).
Gambar 2.8. Arah Fluks Yang Ditimbulkan Oleh Arus Yang Mengalir Dalam Suatu Lingkar
3. Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang mengalir.
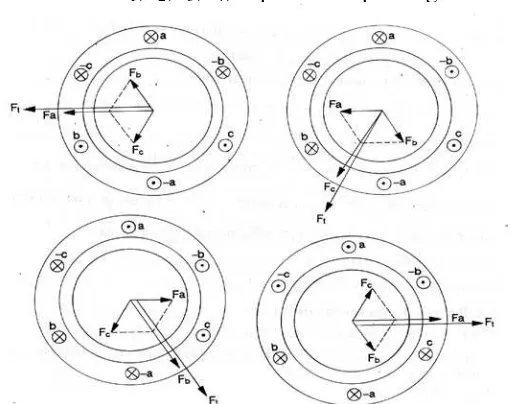
negatif apabila tanda titik (.) terletak pada pangkal konduktor tersebut (gambar 2.8). Maka diagram vektor untuk
fluks total pada keadaan t1, t2, t3, t4, dapat dilihat pada gambar 2.9.
Gambar 2.9. Diagram Vektor Untuk Fluks Total Pada Keadaan t1, t2, t3,
t4
Dari semua diagram vektor di atas dapat pula dilihat bahwa fluks resultan berjalan (berputar).
2.4 Prinsip Kerja Motor Induksi Tiga Phasa
Adapun prinsip kerja motor induksi tiga phasa mengikuti langkah-langkah sebagai berikut :
1. Apabila belitan stator dihubungkan dengan sumber tegangan tiga fasa yang setimbang maka akan dihasilkan arus pada tiap belitan fasa.
2. Arus pada tiap fasa menghasilkan fluksi bolak-balik yang berubah-ubah 3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan
timbul ggl pada stator motor yang besarnya adalah
E1 =4,44fN1Φ( Volt ) ………...(2.1)
4. Penjumlahan ketiga fluksi bolak - balik tersebut disebut medan putar yang berputar dengan kecepatan sinkron ns, besarnya nilai ns
kutub p dan frekuensi stator f yang dirumuskan dengan
5. Akibat fluksi yang berputar tersebut maka timbul tegangan induksi pada belitan stator yang besarnya dapat dinyatakan dengan persamaan berikut.
Φ
= 2
2 4,44fN
E ………... (2.3) 6. Fluksi yang berputar tersebut akan memotong batang konduktor pada
rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar
=Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
2
Ф
=Jumlah lilitan kumparan rotor
m
7. Karena kumparan rotor merupakan rangkaian t ertutup, maka ggl tersebut akan menghasilkan arus I
=Fluksi maksimum(Wb)
8. Adanya arus I
2.
2 di dalam medan magnet akan menimbulkan gaya F
9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator.
10. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr
11. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s
= tegangan induksi pada rotor dalam keadaan berputar (Volt)
2
keadaan berputar)
= s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam
12. Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan
mengalir pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr < ns.
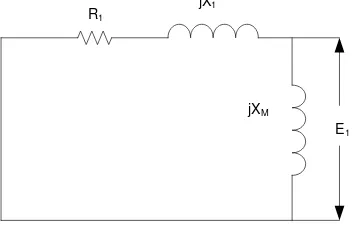
2.5 Rangkaian Ekivalen Motor Induksi 2.5.1 Rangkaian Ekivalen Stator
rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat digambarkan
Gambar 2.10 Rangkaian Ekivalen Stator Motor Induksi
Dimana:
V1
E
= tegangan terminal stator (Volt)
1
I
= ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt)
1 atas 2 komponen, yaitu komponen arus beban dan komponen arus penguat I0.
Komponen arus penguat I0 merupakan arus stator tambahan yang diperlukan
untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm E1
Komponen arus penguat I
.
0 terbagi atas komponen rugi-rugi inti IC yang
sefasa dengan E1 dan komponen magnetisasi IM yang tertinggal 900 dari E1
Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya (E
.
Dimana a adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya a kali jumlah lilitan rotor.
...………...……..………... (2.10)
Bila rotor-rotor diganti secara magnetik, lilitan – ampere masing-masing harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2S
I
pada rotor ekivalen adalah:
2S
a Irotor
= ………… ……….……….………… (2.11)
sehingga hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen
dan impedansi bocor frekuensi slip Zrotor
Z
dari rotor sebenarnya adalah:
2S =
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator.
Selanjutnya persamaan (2.12) dapat dituliskan:
=
= impedansi bocor rotor frekuensi slip tiap fasa dengan referensi ke
sX2 = reaktansi bocor referensi pada frekuensi slip X2
harga reaktansi bocor rotor dengan referensi frekuensi stator (Ohm). didefinisikan sebagai
2.5.2 Rangkaian Ekivalen Rotor
Reaktansi yang didapat pada persamaan (2.13) dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2
didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron. Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator dan rotor adalah:
E2s = sE1 ………...…….(2.14) Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga efektif
I2s= I2 ………...(2.15) Dengan membagi persamaan (2.14) dengan persamaan (2.15) didapatkan:
Didapat hubungan antara persamaan (2.15) dengan persamaan (2.16), yaitu
Dengan membagi persamaan (2.17) dengan s, maka didapat
Dari persamaan (2.18) dapat dibuat rangkaian ekivalen untuk rotor.
Dari persamaan (2.13) , (2.14) dan (2.18) maka dapat digambarkan rangkaian ekivalen pada rotor sebagai berikut :
Gambar 2.11. Rangkaian Ekivalen Pada Rotor Motor Induksi.
1
Gambar 2.12. Rangkaian Ekivalen Motor Induksi Tiga Phasa
Untuk mempernudah perhitungan maka rangkaian ekivalen pada gambar 2.12 diatas dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga fasa akan dapat digambarkan sebagai berikut.
1
Atau seperti gambar berikut:
Gambar 2.14. Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi
Dimana: X'2= a2X2
R'2= a2R2
Dalam teori transformator-statika, analisis rangkaian ekivalen sering disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena adanya celah udara yang menjadikan perlunya suatu arus peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen
c
R dapat dihilangkan (diabaikan). Rangkaian ekivalen menjadi gambar berikut.
diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin
= tegangan sumber (Volt)
1
θ= perbedaan sudut phasa antara arus masukan dengan tegangan sumber.
= arus masukan(Ampere)
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik pada poros motor. Berbagai rugi-rugi yang timbul selama proses konversi energi listrik antara lain:
1. Rugi-rugi tetap (fixed losses), terdiri dari:
Rugi-rugi inti stator (Pi
P
Rugi-rugi gesek dan angin 2. Rugi-rugi variabel, terdiri dari:
Rugi-rugi tembaga stator (Pts
P
)
ts = 3. I12. R1
Rugi-rugi tembaga rotor (P
(Watt)……..……….……..(2.22)
tr
P
)
tr = 3. I22. R2
Daya pada celah udara (P
(Watt)…..………..……..(2.23)
cu
P
) dapat dirumuskan dengan:
Jika dilihat pada rangkaian rotor, satu-satunya elemen pada rangkaian ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2
P
/ s. Oleh karena itu daya pada celah udara dapat juga ditulis dengan:
cu = 3. I22
S R2
. (Watt) ……….……….……….(2.25)
Apabila rugi-rugi tembaga dan rugi-rugi inti dikurangi dengan daya input motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya mekanik.
Besarnya daya mekanik yang dibangkitkan motor adalah: Pmek = Pcu – Ptr
Dari persamaan (2.20) dan (2.22) dapat dinyatakan hubungan rugi-rugi tembaga dengan daya pada celah udara:
Ptr = s. Pcu
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya pada celah udara dikurangi dengan rugi-rugi tembaga rotor, maka daya mekanik dapat juga ditulis dengan:
(Watt)……….…………(2.28)
Pmek = Pcu
Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya mekanik dikurangi dengan rugi-rugi gesek dan angin, sehingga daya keluarannya:
Pout = Pmek – Pa&g – Pb
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan dalam bentuk slip yaitu:
(Watt)………...………(2.30)
Pcu : Ptr : Pmek
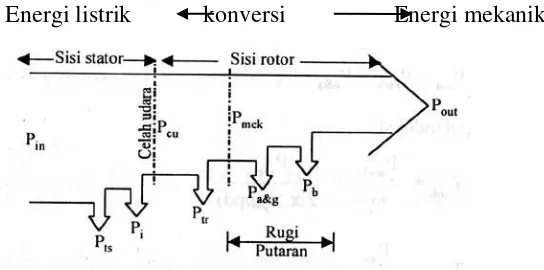
Gambar 2.16 menunjukkan aliran daya pada motor induksi tiga phasa: = 1 : s : 1 – s.
Energi listrik konversi Energi mekanik
Gambar 2.16. Diagram Aliran Daya Motor Induksi 2.7 Torsi Motor Induksi Tiga Phasa
Torsi berhubungan dengan brhubungan dengan kemampuan motor untuk mensuplai beban mekanik.Oleh karena itu , Torsi (τ) secara umum dapat dirumuskan sebagai berikut.
���� =
��
�� ....………..……….(2.31)
dengan :ωr
Dari persamaan (2.5) dapat dibuat bahwa n
= kecepatan sudut (mekanik) dari rotor.
r = ns
ω
(1-s), sehingga diperoleh pula;
1= ωs
Kecepatan sinkron selalu bernilai konstan untuk tiap-tiap frekuensi dan jumlah kutub yang diberikan motor. Karena kecepatan sinkron selalu tetap, maka daya pada celah udara akan menentukan besar torsi induksi pada motor.
(1-s)
����=����
����
…….………..………(2.33)
Meskipun terdapat berbagai cara menyelesaikan rangkaian seperti gambar 2.15, untuk menentukan besarnya arus I2
Agar dapat menghitung ekivalen thevenin dari sisi input rangkaian ekivalenmotor induksi, pertama-tama terminal X’s
, kemungkinan penyelesaian yang paling mudah dapat dilakukan dengan menentukan rangkaian ekivalen thevenin dari gambar tersebut.
dihubung buka (open-circuit), kemudian tegangan open circuit diterminal tersebut ditentukan. Untuk menentukan impedansi thevenin, maka tegangan phasa terminal tersebut ditentukan. Untuk menentukan impedansi Thevenin, maka tegangan phasa dihubung singkat (short-circuit) dan Zeq
VTH
jX1
R1
Vφ
jXM
ditentukan dengan melihat kedalam sisi terminal.
Gambar 2.17 Tegangan Ekivalen Thevenin Pada Sisi Rangkaian Input Dari gambar 2.17 ditunjukkan bahwa terminal di open-circuit untuk mendapatkan tegangan ekivalen Thevenin. Oleh karena itu dengan aturan pembagi tegangan diperoleh:
���=�����
���=��� ���
1+��1+���
Magnitud dari tegangan Thevenin VTH
���=�� �� �(��+�1)2
adalah
Karena reaktansi magnetisasi XM >> X1dan XM >> R1, harga pendekatan
dari magnitud tagangan ekivalen Thevenin ���≈ �� ��
��+�1
R …………
Gambar 2.18 menunjukkan tegangan input dihubung singkat . Impedansi ekivalen Thevenin dibentuk oleh impedansi paralel yang terdapat pada rangkaian.
……….….(2.34)
E1 jX1
R1
jXM
Gambar 2.18 Impedansi Ekivalen Thevenin Pada Sisi Rangkaian Input
Impedansi Thevenin ZTH
��� = �1��
, tahanan dari reaktansi Thevenin secara pendekatan diberikan oleh
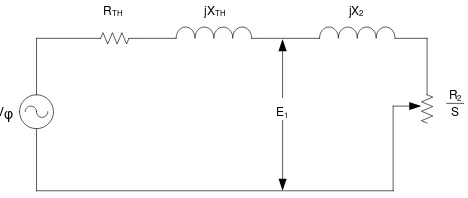
Gambar dibawah menunjukkan rangkaian ekivalen Thevenin
jXTH
RTH
Vφ E1
jX2
R2
S
Gambar 2.19 Rangkaian Ekivalen Thevenin Motor Induksi Dari gambar diatas arus I2
�2=����
��+�2 ; �2=
���
���+��2+���+��2
diberikan oleh:
Magnitud dari arus
�2= ���
�����+��2� 2
+(��+�2)2
………... ………..…… ..(3.36)
Daya pada celah udara diberikan oleh:
��� = 3�22�′� ; ��� =
3����2/�
�(���+�2)2(��+�2)� …..………..(3.37)
Hubungan antara torsi dan slip dinyatakan pada gambar 2.20
− Pada kecepatan hipersinkron (kecepatan melebihi sinkron), slipnya negatif (biasanya kecil), mesin beroperasi sebagai generator induksi dengan torsi bekerja dengan arah yang berlawanan dengan putaran medan putar.
− Saat mesin bekerja pada kecepatan stanstill dan kecepatan sinkron, dengan slip positif antara 1 dan 0, mesin berputar pada keadaan tanpa beban
sehingga slipnya kecil sekali, GGL rotor juga kecil sekali, Z2
− Selanjutnya beban mekanik I dipasang pada poros sehingga putaran rotor makin lambat, slip naik, GGL rotor naik (besar maupun frekuensinya), menghasilkan arus dan torsi yang lebih besar.
(rotor circuit
impedance) hampir Rmurni dan arus cukup untuk membangkitkan torsi dan memutar rotornya.
− Jika motor induksi diputar berlawanan dengan arah putaran medan putar maka masih akan dihasilkan torsi yang bertindak sebagai rem dan terjadi penyerapan tenaga mekanik: mesin dalam keadaan berputar dengan slip “s”, kemudian arah medan putar tiba-tiba dibalik, maka akan terjadi rotor mempunyai slip (2-s), kecepatan turun menuju nol dan dapat dibawa ke kondisi stanstill. Cara ini adalah cara pengereman motor yang disebut dengan Plugging.
2.8 Efisiensi Motor Induksi Tiga Phasa
Dari persamaan di atas dapat dilihat bahwa efisiensi motor tergantung pada besarnya rugi-rugi. Pada dasarnya metode yang digunakan untuk menentukan efisiensi motor induksi bergantung pada dua hal apakah motor itu dapat dibebani secara penuh atau pembebanan simulasi yang harus digunakan.
. Cos………(2.40)
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh rugi-rugi mekanik dan rugi-rugi inti. Rugi-rugi tembaga stator tidak dapat diabaikan sekalipun motor berbeban ringan maupun tanpa beban.
2.9 Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan, dan pengukuran tahanan dc lilitan stator.
2.9.1 Pengujian Tanpa Beban
Pengujian ini untuk mengukur rugi-rugi putaran dan arus magnetisasi. Pada keadaan tanpa beban (beban nol), beban yang dipikul hanyalah rugi-rugi angin dan gesekan. Adapun rangkaian pengujian tanpa beban adalah sebagai berikut:
Gambar 2.22. Rangkaian pengujian tanpa beban motor induksi Dari data instrumen ukur dapat ditentukan parameter-parameter (per fasa):
Zbn
m) dapat dicari jika reaktansi primer X1
I
Slip yang terjadi umumnya sangat kecil (≤ 0,001), sehingga:
R2
pada percobaan ini diabaikan.
Rugi rotor ini dianggap sebagai rugi angin dan gesekan, sedangkan rugi tembaga stator dapat dicari sebagai:
Pts = I12 . R1
Dimana I
………...(2.43)
1 di sini sama dengan Ibn (fasa) dan R1
Persamaan daya:
dicari lewat pengujian tahanan stator arus searah.
Pin( bn ) = Pts
P
+ .………....……….(2.44)
rot = Pi + Pa & g
Dimana:
+ rugi lain-lain……...…………...(2.45)
Prot
P
= daya yang hilang akibat adanya putaran (Watt)
i
P
= rugi inti (Watt)
a & g = rugi angin dan gesekan (Watt)
2.9.2 Pengujian Tahanan Stator
Pengujian ini digunakan untuk mengetahui nilai parameter resistansi stator (primer) R1. Pada pengujian ini kumparan stator dialiri arus searah, sehingga
suhunya mencapai suatu nilai yang sama jika motor induksi beroperasi pada kondisi operasi normal (resistansi kumparan merupakan fungsi suhu).
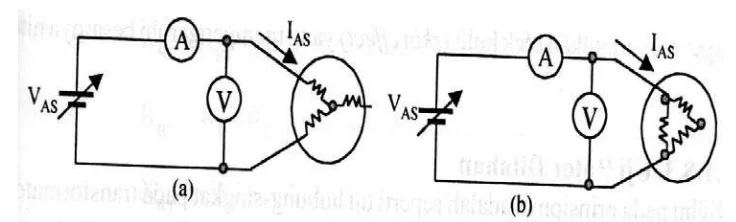
Pada percobaan ini, jika kumparan stator terhubung bintang (gambar 2.21.a), maka arus akan mengalir melewati dua kumparan dengan resistansi sebesar 2R1
Sedangkan jika terhubung segitiga (gambar 2.21.b), maka arus akan mengalir melewati ketiga kumparan tersebut yang besarnya secara ekivalen terlukis pada gambar berikut, dengan resistansi total:
Nilai R1 yang didapat hanya merupakan nilai pendekatan, karena pada
2.9.3 Pengujian Rotor Tertahan
Pengujian ini pada prinsipnya adalah seperti pengujian hubung singkat pada transformator. Motor induksi dihubungkan dengan sumber daya listrik, serta instrument-instrumen ukur pada gambar berikut:
Gambar 2.24. Rangkaian Rotor Ditahan Motor Induksi Dimana:
fr = frekuensi rotor; fj = frekuensi jaringan listrik; fuji
Pada pengujian ini, rotor ditahan agar tidak berputar dan pada saat itu nilai-nilai pada instrumen ukur dicatat. Pada pengujian ini ketika setelah frekuensi dan tegangan diatur, serta rotor ditahan, arus yang mengalir pada motor harus dengan segera disetel pada nilai nominalnya, data daya masukan, tegangan dan arus yang terukur harus dengan segera dicatat sebelum rotor menjadi sangat panas. Sumber daya yang digunakan adalah sumber daya yang tagangan dan frekuensinya dapat disetel atau diatur (adjustable).
= frekunsi
Adapun nilai impedansi per fasa pada percobaan ini sebesar:
ZRT
adalah besarnya resistansi kumparan stator dan kumparan rotor.
1 dan X'2
Sedangkan besarnya reaktansi kumparan stator dan rotor pada kondisi operasi normal adalah:
adalah besarnya reaktansi kumparan stator dan rotor pada frekuensi uji.
Adapun untuk menentukan besarnya nilai X
………….………(2.53)
1 dan X2
Tabel 2.1. Standar besarnya reaktansi berbagai jenis desain rotor. dapat dilihat pada tabel berikut:
BAB III
TEORI KOMPONEN SIMETRIS DAN TORSI MOTOR INDUKSI TIGA FASA DENGAN TAHANAN ROTOR TAK SEIMBANG
3.1 Teori Komponen Simetris
Pada tahun 1918 salah satu cara yang paling ampuh untuk menangani rangkaian fasa majemuk (poly-phase = berfasa banyak) tak seimbang telah dibahas C.L. Fortescue di hadapan suatu sidang American Institute of Electrical Engineers. Sejak saat itu, metode komponen simetris menjadi sangat penting dan merupakan pokok pembahasan berbagai artikel dan penyelidikan uji coba. Gangguan tak simetris pada sistem transmisi, yang dapat terjadi karena hubungan singkat, impedansi antar saluran, impedansi dari satu atau dua saluran ke tanah, atau penghantar yang terbuka, dipelajari dengan metode komponen simetris ini.
Karya Fortescue membuktikan bahwa suatu sistem tak seimbang yang terdiri dari n fasor yang berhubungan (related) dapat diuraikan menjadi n buah sistem dengan fasor seimbang yang dinamakan komponen-komponen simetris (symmetrical components) dari fasor aslinya. n buah fasor pada setiap himpunan komponennya adalah sama panjang, dan sudut di antara fasor yang bersebelahan dalam himpunan itu sama besarnya. Meskipun metoda ini berlaku untuk setiap sistem fasa majemuk tak seimbang, kita akan membatasi pembahasan kita pada sistem tiga fasa saja.
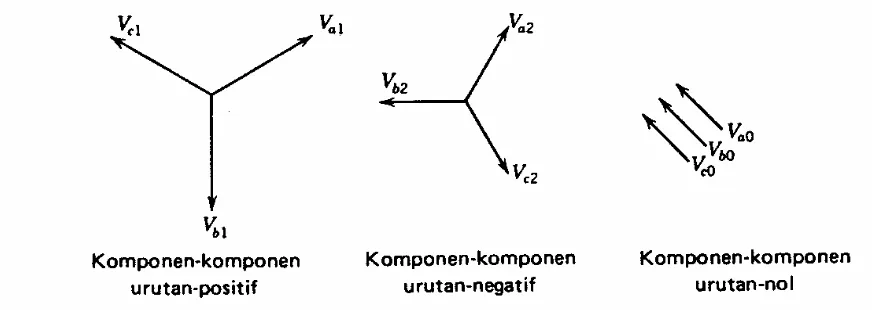
1. Komponen urutan positif (positive sequence components) yang terdiri dari tiga fasor yang sama besarnya, terpisah satu dengan yang lain dalam fasa sebesar 120°, dan mempunyai urutan fasa yang sama seperti fasor aslinya. 2. Komponen urutan negatif yang terdiri dari tiga fasor yang sama besarnya,
terpisah satu dengan yang lain dalam fasa sebesar 120°, dan mempunyai urutan fasa yang berlawanan dengan fasor aslinya.
3. Komponen urutan nol yang terdiri dari tiga fasor yang sama besarnya dan dengan penggeseran fasa nol antara fasor yang satu dengan yang lain. Telah menjadi kebiasaan umum, ketika memecahkan permasalahan dengan menggunakan komponen simetris bahwa ketiga fasa dari sistem dinyatakan sebagai a, b, dan c dengan cara yang demikian sehingga urutan fasa tegangan dan arus dalam sistem adalah abc. Jadi, urutan fasa komponen urutan positif dari fasor tak seimbang itu adalah abc, sedangkan urutan fasa dari komponen urutan negatif adalah acb. Jika fasor aslinya adalah tegangan, maka tegangan tersebut dapat dinyatakan dengan Va, Vb, dan Vc. Ketiga himpunan
komponen simetris dinyatakan dengan subskrip tambahan 1 untuk komponen urutan positif, 2 untuk komponen urutan negatif, dan 0 untuk komponen urutan nol. Komponen urutan positif dari Va, Vb dan Vc adalah Va1, Vb1, dan Vc1.
Demikian pula, komponen urutan negatif adalah Va2, Vb2, dan Vc2, sedangkan
komponen urutan nol adalah Va0, Vb0, dan Vc0
Gambar 3.1 menunjukkan tiga himpunan komponen simetris semacam itu. Fasor arus akan dinyatakan dengan subskrip seperti untuk tegangan tersebut. Karena setiap fasor tak seimbang, yang asli adalah jumlah komponen, fasor asli yang dinyatakan dalam suku-suku komponennya adalah:
Va = Va1 + Va2 + Va0
V
(3.1)
b = Vb1 + Vb2 + Vb0
V
(3.2)
c = Vc1 + Vc2 + Vc0
Sintesis himpunan tiga fasor tak seimbang dari ketiga himpunan komponen simetris dalam Gambar 3.1, diperlihatkan pada Gambar 3.2.
(3.3)
Gambar 3.1 Tiga himpunan fasor seimbang yang merupakan komponen simetris dari tiga fasor tak seimbang.
3.2 Operator “a”
Karena adanya pergeseran fasa pada komponen simetris tegangan dan arus dalam sistem tiga fasa, akan sangat memudahkan bila kita mempunyai metoda penulisan cepat untuk menunjukkan perputaran fasor dengan 120°. Hasil kali dua buah bilangan kompleks adalah hasil kali besarannya dan jumlah sudut fasanya. Jika bilangan kompleks yang menyatakan fasor dikalikan dengan bilangan kompleks yang besarnya satu dan sudutnya �, bilangan kompleks yang dihasilkan adalah fasor yang sama besar dengan fasor aslinya tetapi fasanya tergeser dengan sudut � memutar fasor yang dikenakannya melalui sudut �.
Kita sudah kenal dengan operator j, yang menyebabkan perputaran sebesar 90°, dan operator -1, yang menyebabkan perputaran sebesar 180°. Penggunaan operator j sebanyak dua kali berturut-turut akan menyebabkan perputaran melalui 90° + 90°, yang membawa kita pada kesimpulan bahwa j x j menyebabkan perputaran sebesar 180°, dan karena itu kita ingat kembali bahwa j2
�=�∠���°= −�.�+��.���
Jika operator a dikenakan pada fasor dua kali berturut-turut, maka fasor itu akan diputar dengan sudut sebesar 240°. Untuk pengenaan tiga kali berturut-turut
fasor akan diputar dengan 360°. Jadi,
��= �∠���°= −�.� − ��.���
dan
�� =�∠���°= �∠�°= �
Gambar 3.3 berikut ini memperlihatkan fasor yang melukiskan berbagai pangkat dari a.
Gambar 3.3 Diagram fasor berbagai pangkat dari operator a
3.3 Komponen Simetris Dari Fasor Tak Simetris
dan Vc sebagai hasil kali fungsi operator a dan komponen Va. Dengan berpedoman pada Gambar 3.1, hubungan berikut dapat diperiksa kebenarannya:
��� =����� ��� =����
��� =���� ��� =����� (3.4)
��� =��� ��� =���
Dengan mengulangi Persamaan (3.1) dan memasukkan Persamaan (3.4) ke dalam Persamaan (3.2) dan (3.3) dihasilkan:
��=���+���+��� (3.5)
��=�����+����+��� (3.6) ��=����+�����+��� (3.7)
Atau dalam bentuk matriks:
�����
Untuk mempermudah kita misalkan:
A = �
dan dengan memprakalikan kedua sisi persamaan (3.8) dengan A-1
�
dapat menulis masing-masing persamaan itu dalam bentuk yang biasa. Dari Persamaan (3.11), kita peroleh:
���= �
� ( �� + + ) (3.12)
( + a + ) (3.13)
( + + a ) (3.14) Jika diperlukan, komponen Vb0, Vb1, Vb2, Vc0, Vc1, dan Vc2
Persamaan (3.12) menunjukkan bahwa tidak akan ada komponen urutan nol jika jumlah fasor tak seimbang itu sama dengan nol. Karena jumlah fasor tegangan antar saluran pada sistem tiga fasa selalu nol, maka komponen urutan nol tidak pernah terdapat dalam tegangan saluran itu, tanpa memandang besarnya ketidakseimbangannya.
, dapat diperoleh dari persamaan (3.4).
Persamaan yang terdahulu sebenarnya dapat pula ditulis untuk setiap himpunan fasor yang berhubungan, dan kita dapat pula menuliskannya untuk arus sebagai ganti tegangan. Persamaan tersebut dapat diselesaikan baik secara analitis maupun secara grafis. Karena beberapa persamaan yang terdahulu sangat mendasar, marilah kita tuliskan ringkasannya untuk arus-arus:
(3.15) (3.16)
(3.17)
(3.18)
( ) (3.20)
Dalam sistem tiga fasa, jumlah arus saluran sama dengan arus In dalam jalur kembali lewat netral. Jadi,
+ + = (3.21)
Dengan membandingkan Persamaan (3.18) dan (3.21) kita peroleh:
= 3 (3.22)
Jika tidak ada jalur yang melalui netral dari sistem tiga fasa, In adalah nol, dan arus saluran tidak mengandung komponen urutan nol. Suatu beban dengan hubungan ∆ tidak menyediakan jalur ke netral, dan karena itu arus saluran yang mengalir ke beban yang dihubungkan ∆ tidak dapat mengandung komponen urutan nol.
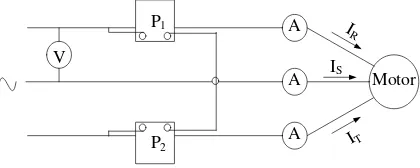
3.4 Torsi Motor Induksi Tiga Fasa Dengan Tahanan Rotor yang Tidak Seimbang
Gambar 3.4 Motor induksi dengan belitan rotor tak seimbang
Pada pokok bahasan sebelumnya telah dijelaskan bahwa jika ada suatu rangkaian tiga fasa yang mempunyai tahanan yang tidak seimbang maka akan timbul komponen simetris pada rangkaian itu. Maka akan ada komponen simetris pada rangakaian rotor diatas yang besarnya ditunjukkan pada persamaan dibawah ini:
Dari persamaan diatas maka didapat besar arus di rotor (I2) untuk urutan
positif (I21) dan urutan negative (I22
V
), dan juga didapatkan tegangan di rotor (V2) sebesar:
Pada pendekatan pertama, semua arus rotor mempunyai frekuensi f2=Sf1 pada keadaan steady state (tetap). Gaya gerak magnet maju, dihasilkan oleh Iar1,
Ibr1, Icr
�
1, berinteraksi seperti biasa dengan belitan.
21�2−�21 = −��1��21 ; �21= �2�21+ ���11
�
(Pers 3.26)
11�1−�11 = −��1�11 ; �11= �1�11+ ���21…(Pers 3.27)
Komponen gaya gerak magnet yang mundur dari arus rotor yang berputar terhadap stator terdapat pada kecepatan n1’. Adapun n1’ adalah:
Maka ini akan menginduksi gaya gerak listrik pada frekuensi f1 = f1(1-2S). Gaya gerak mundur dihasilkan oleh I22, yang akan menghasilkan torsi lawan.
Dimana: Dimana:
I21
I
= Arus Forward rotor (Ampere)
22
I
= Arus backward rotor (Ampere)
11
I
= Arus forward stator (Ampere)
12
R
= Arus backward stator (Ampere)
2
= Teganagan forward rotor (Volt)
Vs = Tegangan sumber (Volt) L1
L
= Induktansi mutual stator (H)
2
Lr = Induktansi rotor (H)
= Induktansi mutual rotor (H)
Ls = Induktansi Stator (H) Lm = Induktansi magnetic (H)
�1
�1= 2 ��1;
= Kecepatan sudut frekuensi dari arus phasa (rad/s);
Dimana �1=Jumlah pasang kutub
�21
�
= Fluks lingkage rotor urutan positif (Wb)
22
� = Slip
= Fluks lingkage rotor urutan negatif (Wb)
Diketahui torsi adalah:
Dari pers 3.26, apabila rotor dihubung singkat maka tegangan di rotor (V2) = 0, maka:
�21�2 = −��1��21 ... .(Pers 3.31)
Dengan menambah kan �21 ∗ (�21 conjugate) ke persamaan 3.31 di atas maka:
Dengan menggabungkan bilangan real dan imaginer bilangan di atas didapat persamaan:
�21∗�21�2 + j�1��21�21* ...(Pers 3.33)
Maka �� adalah:
Imaginer = 3 ��1��21�21
*...(Pers 3.34)
Subsitusikan Persamaan (3.30) ke Persamaan (3.34), maka di dapat: Te = 3 �1 ���� (�21�21* ) ...(Pers 3.35)
Dengan menurunkan persamaan di atas maka di dapat: Te = 3 P1 Imag [(L2I21 + LmI11)I21*]
= 3 P1 Imag (LmI11 I21
*) = 3 P1 Imag (I11 I21
Persamaan di atas juga berlaku untuk persamaan (3.28) yang menghasilkan torsi lawan.
*)……….(Pers 3.36)
Maka ekspresi torsi adalah:
Te = 3 P1Lm[Image(I11I21*) + Image (I12I22*)] = Te1 + Te2.(pers 3.37)
Dimana torsi adalah penjumlahan dari maju (Te1 ) dan torsi mundur (Te2).
Untuk Te1 menggunakan komponen simetris urutan “1” dan untuk Te2 memakai
Gambar 3.5 Kurva torsi terhadap slip
Komponen torsi mundur adalah positif (motoring) dari 1-2S < 0 atau S > 0,5 dan negative (breaking) pada S < 0,5. Pada permulaan, torsi komponen mundur akan bergerak (motoring). Dan juga untuk S= 0,5, torsi balik adalah 0, karena induksi gaya gerak listrik untuk keadaan ini berada pada frekuensi f1’ = f1(1-2S), jika S=0, maka F1’ = 0dan tidak terjadi induksi pada keadaan ini. Torsi balik ini juga disebut dengan Torsi George atau monoksial.
BAB IV
PENGEREMAN PADA MOTOR INDUKSI TIGA PHASA
4.1 Umum
Pada pengereman motor induksi tiga phasa harus dipilih cara pengereman yang baik, yaitu Pengereman tidak mengakibatkan kerusakan-kerusakan pada mesin, Rugi-rugi panas akibat pengereman ditekan sekecil-kecilnya sehingga tidak merusak mesin, Mesin dapat dijalankan dan dihentikan sesuai dengan jadwal operasi yang diinginkan.
Tujuan pengereman tidak terbatas untuk menghentikan perputaran mesin secara cepat tetapi juga untuk menjaga agar perputaran mesin tidak melebihi putaran yang diizinkan. Sehingga dapat disimpulkan, pengereman merupakan suatu kerja dari gaya yang menghasilkan perlambatan atau penghentian.
Ada beberapa sistem yang digunakan untuk pengereman motor induksi, diantaranya sistem pengereman mekanis dan sistem pengereman elektrodinamik.
Pada sistem pengereman elektrodinamik dapat dibedakan atas beberapa metode antara lain, Pengereman Regeneratif, Pengereman Dinamik, Pengereman
Plugging.
4.2 Sistem Pengereman Mekanis
sepatu rem. Pengereman secara mekanik menimbulkan rugi-rugi mekanis seperti gesekan yang menimbulkan panas dan menghasilkan debu akibat gesekan. Dengan demikian proses pengereman ini pada dasarnya dilakukan dengan cara mengubah energi mekanis menjadi energi panas.
4.3 Sistem Pengereman Elektrodinamik
Pada sistem pengereman ini, torsi pengereman timbul dari dalam motor itu sendiri sebagai akibat kerja elektris dari fluksi medan penguat sehingga timbul arus rotor yang mengakibatkan terjadinya torsi pengereman, hal ini disebut juga sistem pengereman dalam. Pengereman secara elektris lebih halus dibanding pengereman secara mekanis. Pengereman secara listrik ini digunakan untuk mengatur waktu pengereman, Pengereman secara listrik ini digunakan untuk mengatur waktu pengereman, perlambatan dan sebagainya. Ada tiga metode untuk melakukan pengereman secara elektrodinamik pada motor induksi tiga phasa, antara lain:
1. Pengereman Regeneratif, dengan cara mengembalikan energi ke rangkaian sumber/jala-jala
2. Pengereman Plugging, dengan cara membalikkan arah medan motor tersebut dari arah semula.
3. Pengereman Dinamik.
4.3.1 Pengereman Regeneratif
Pengereman regereratif terjadi pada saat putaran rotor (nr) melebihi
induksi yang mengirimkan energinya ke jala-jala. Perputaran rotor melebihi kecepatan sinkronnya disebabkan adanya gaya luar yang menyebabkan rotor bergerak harus lebih cepat dari putaran sinkronnya. Hal ini sering dijumpai pada mesin-mesin pengangkat. Pada waktu menurunkan beban muatan, motor malahan ditarik oleh beban tersebut sehingga perputaran motor melebihi putaran sinkronnya, Dengan kondisi demikian, slip motor menjadi negatif, yang merubah fungsi motor menjadi generator yang mengembalikan energi ke jala-jala.
Pengereman regeneratif dapat kita jumpai pada motor induksi yang memiliki dua macam perputaran nominal yang berarti ada dua macam jumlah kutubnya, yaitu pada saat terjadi perubahan dari perputaran nominal tinggi, ke perputaran nominal rendah.
4.3.2 Pengereman Plugging
stator rotor
Gambar 4.1 Arah putaran medan putar stator dan putaran rotor pada saat pengereman plugging: (a) sebelum pengereman: (b) selama proses pengereman: (c) Setelah pengereman bila saat nr = 0,
pembalikan phasa tidak dilepas dari sumber.
Pada gambar 4.1 (a) sebelum pengereman, kecepatan medan putar stator ns dan putaran rotor nr dengan ns > nr harga slip < 1, mesin bekerja sebagai
motor dengan mengambil daya listrik dari sumber. Setelah pembalikan dua phasa stator ( phasa R dan S), yaitu selama proses pengereman berlangsung kecepatan medan putar menjadi – ns
keadaan selama pengereman menyebabkan naiknya frekuensi rotor (f2 = sf1
Akibat kerja torsi pengereman, putaran rotor dengan cepat sekali turun sampai nol, sumber harus dilepaskan, kalau tidak dilepaskan torsi pengereman akan mempercepat putaran rotor dalam arah yang berlawanan (gambar 3.1 (c)). Putaran rotor menjadi - n
). Hal ini mengakibatkan rugi-rugi tembaga dan rugi- rugi besi meningkat.
r dan harga slip S < 1 sehingga mesin akan kembali
bekerja sebagai motor, tapi dengan arah putaran yang berlawanan dengan arah putaran rotor semula.
4.3.3 Pengereman Dinamik
Pengereman dengan metode dinamik ini terdiri atas 2 macam yaitu:
4.3.3.1 Pengereman Dinamik dengan Sumber arus Searah
+
-DC supply
Rectifier
R S T
R S T
S
S
R R
(a) (b)
Gambar 4.2 Rangkaian Pengereman Dinamik Motor Induksi Tiga Phasa. (a) Penguatan berasal dari baterai,
4.3.3.2 Pengereman Dinamik dengan Kapasitor A. Prinsip Kerja
Sistem pengereman dengan menggunakan kapasitor sebagai rangkaian penguat dimana arus yang ditimbulkan oleh penguatan sendiri mengalir dalam mesin tanpa adanya sumber daya dari luar, melainkan dari energi yang tersisa dari rotor yang diubah menjadi energi listrik.
Prinsip kerja pengereman ini dimulai dengan melepaskan motor dari jala- jala dan menghubungkan stator secara paralel dengan kapasitor yang dirangkai secara delta ataupun secara bintang.
C
C C C C
C R
S T
Gambar 4.3 Hubungan Kapasitor Sebagai Penguatan yang Dapat Dihubungkan Delta atau Bintang.
masih dalam keadaan berputar, atau dengan kata lain rotor memiliki energi kinetis yang tersisa. Dengan adanya energi kinetis maka stator akan terinduksi.
Besarnya arus penguatan sebanding dengan besarnya tegangan pada stator, tegangan stator akan bertambah dikarenakan terjadinya penambahan arus penguat antara reaktansi kapasitif dengan reaktansi mesin. Reaktansi yang paling berpengaruh dalam pengereman ini adalah reaktansi magnet mesin
Akibat adanya arus penguatan, maka timbul kopel lawan yang memperlambat putaran rotor. Energi yang dihasilkan selama pengereman ini hilang dalam bentuk panas pada belitan rotor dan stator.
Setelah proses penguatan sendiri berakhir, tegangan dan arus penguatan akan turun dengan cepat karena pengaruh resistansi dan pengaruh tegangan induksi yang relatif semakin kecil. Turunnya tegangan stator ini diakibatkan oleh sisa energi kinetis yang masih dimiliki rotor tidak mampu lagi menginduksikan tegangan kesisi stator.
Hal yang harus diperhatikan ialah pengereman dengan penguatan yang dibangkitkan sendiri tidak dapat merem motor sampai berhenti. Setelah proses penguatan sendiri berakhir, proses pengereman akibat penguatan sendiri juga berakhir. Motor akhirnya berhenti akibat gesekan. Agar motor dapat dihentikan dengan cepat, hendaklah proses pembangkitan penguatan sendiri tidak boleh berhenti, atau dengan kata lain proses penguatan sendiri harus berulang terus. B. Timbulnya Penguatan Sendiri dan Rangkaian Ekivalen
kinetis yang masih tetap dimiliki rotor. Pada awalnya ada fluksi remanensi (setelah sumber dilepas) yang akan membentuk tegangan imbas yang kecil di rotor. Pada sisi stator tempat kapasitor, akan dibangkitkan tegangan bolak-balik yang merupakan penjumlahan tegangan stator yang mula-mula sebesar tegangan jala-jala, dengan tegangan yang diinduksikan dari sisi rotor. Tegangan bolak-balik ini akan membangkitkan arus penguat untuk mengisi kapasitor hingga diperoleh keseimbangan antara reaktansi kapasitif dengan reaktansi magnet mesin (XM=XC).
VT
IM
Capacitor bank voltage Vc
Ic Small C Medium C Large C
(a) (b)
Gambar 4.4 (a) kurva magnetisasi mesin induksi (Xm). (b) Kurva Karakteristik arus-tegangan Capacitor bank , semakin besar nilai
XC
Xm
V
Vb
Va
V1
Ib
Ia Ic Id
A
Gambar 4.5 Karakteristik Hubungan Antara Arus Penguatan Dengan Tegangan
Pada gambar 4.5, tegangan mula-mula pada sisi stator sama dengan tegangan jala -jala V1, dimana tegangan V1 ini membangkitkan arus sebesar
Ia
yang besarnya I ,
a, adalah:
Arus Ia kemudian akan menaikkan tegangan dari V1 menjadi Va . Tegangan Va
akan menaikkan arus Ia menjadi Ib sesuai dengan rumus:
Proses ini akan berlangsung terus-menerus sampai dicapai suatu keseimbangan. Pada keadaan yang seimbang, motor akan bekerja pada operating point (titik A dalam gambar 4.5). Garis XC dalam gambar 3.5 tersebut mempunyai kemiringan