TUGAS AKHIR
ANALISIS PERFORMANSI MOTOR INDUKSI KAPASITOR PERMANEN SATU PHASA DENGAN BELITAN BANTU DAN BELITAN UTAMA BERDASARKAN TEORI MEDAN FLUKSI SILANG DAN TEORI MEDAN
FLUKSI GANDA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh :
(040402053)
WAHYUDINATA
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ANALISIS PERFORMANSI MOTOR INDUKSI KAPASITOR PERMANEN SATU PHASA DENGAN BELITAN BANTU DAN BELITAN UTAMA BERDASARKAN TEORI MEDAN FLUKSI SILANG DAN TEORI MEDAN
FLUKSI GANDA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU) Oleh :
NIM : 040402053 WAHYUDINATA
Disetujui Oleh : Pembimbing
NIP : 19541220 198003 1 003 IR. EDDY WARMAN
Diketahui Oleh :
Ketua Departemen Teknik Elektro FT-USU
NIP : 19461022 197302 1 001 PROF. DR. IR. USMAN BAAFAI
DEPATEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ABSTRAK
Motor induksi satu phasa adalah motor yang paling banyak digunakan dalam
kehidupan sehari-hari, yang biasanya diaplikasikan pada peralatan rumah tangga,
seperti pompa air, mesin cuci dan kipas angin. Motor ini memiliki jenis yang
beragam, seperti motor kapasitor start, motor permanent atau run, motor universal,
motor split phase, dan beberapa jenis lainnya.
Motor kapasitor permanen adalah jenis motor induksi satu phasa yang
kumparan bantunya terhubung seri dengan kapasitor yang memiliki nilai tertentu.
Kapasitor digunakan sebagai pembeda phasa antara arus kumparan utama dan arus
kumparan bantu terhadap tegangan yang pada akhirnya akibat perbedaan sudut phasa
tersebut akan mempengaruhi fluksi yang dihasilkan. Ada dua kondisi fluksi yang
dihasilkan pada berbagai keadaan yang dapat dijelaskan dengan teori medan fluksi
silang dan teori medan fluksi ganda.
Konsep medan fluksi silang pada motor induksi satu phasa
menjelaskan bahwa medan silang beraksi pada sudut 90° terhadap medan magnet
stator dengan sudut phasa yang juga tertinggal 90° terhadap medan stator, kedua
medan bersatu untuk membentuk sebuah medan putar resultan yang berputar dengan
kecepatan sinkron. Sedangkan konsep medan fluksi ganda menjelaskan bahwa fluks
berpulsa yang dihasilkan, ekivalen dengan dua buah fluks yang mempunyai besar
KATA PENGANTAR
Dengan Nama Allah Yang Maha Pengasih Lagi Maha Penyayang
Syukur Alhamdulillah penulis ucapkan kehadirat Allah S.W.T dimana atas
berkah, karunia dan rahmat-NYA lah penulis dapat menyelesaikan tugas akhir ini.
Tugas akhir ini merupakan suatu syarat bagi penulis untuk memperoleh gelar
sarjana teknik dari departemen Teknik Elektro Fakultas Teknik Universitas Sumatera
Utara.
Selama penulis menjalani pendidikan di kampus hingga diselesaikannya
Tugas Akhir ini, penulis banyak menerima bantuan, bimbingan serta dukungan dari
berbagai pihak. Pada kesempatan ini penulis ingin menyampaikan terimakasih yang
tulus dan sebesar-besarnya kepada :
1. Ayahanda Khaidir.S dan Ibunda Roswita.R, terima kasih atas semua kasih
sayang, do’a, dukungan serta bimbingan yang tiada terkira selama dalam
kandungan hingga sekarang ini.
2. Bapak Prof. Dr. Ir. Usman baafai selaku ketua Departemen Teknik Elektro
FT-USU dan Bapak Rachmad fauzi, ST. MT selaku sekretaris Departemen
Teknik Elektro USU.
3. Bapak Ir.Eddy Warman, selaku dosen Pembimbing Tugas Akhir, atas segala
4. Bapak Ir. Sugih Arto Yusuf, selaku dosen Wali penulis, atas bimbingan dan
arahannya dalam menyelesaikan perkuliahan.
5. Bapak Ir. Satria Ginting, selaku Kepala Laboratorium Konversi Energi Listrik
Fakultas Teknik USU.
6. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh
Karyawan di Jurusan Teknik Elektro Fakultas Teknik Elektro USU.
7. ”Kodok putih” tersayangku Fenny Wulandari, Sfarm. Apt dengan kesabaran
cinta nya terus memberi dukungan serta doa sehingga penulis dapat
menyelesaikan tugas akhir ini.
8. Adik adikku tercinta Anna, Doni, Ari serta adik sepupuku Della dan Dini
yang senantiasa menjadi teman cerita, belajar dan bermain.
9. Sahabat-sahabat terbaikku , kifly, choky, made, kurlub, nera, ronal, eko yang
telah memberi dukungan baik secara lembut maupun berupa ejekan,semoga
kita semua sukses kedepannya.
10.Teman teman ”Kujam”, Muhfi, Harry, Bismo, Hans, Aris, Firdaus, Luthfi,
Salman, Fahmi, atas kebersamaan dan dukungan yang diberikan.
11.Seluruh teman seangkatan,senior dan junior yang tidak dapat penulis
sebutkan satu persatu yang telah membantu dalam penyelesaian tugas akhir
ini
12.Bang Isroy Tanjung sebagai Staff Administrasi Laboratorium Konversi
Energi Listrik serta Asisten Laboratorium Konversi Energi Listrik faisal,
iqbal, taufiq, martua, eko dan kurlub yang telah banyak membantu penulis
13.Teman-teman dunia maya, rani , kak yeni, tika, iwan, andri, away, gita,
nadya, ririn dan lain lain yang tidak dapat penulis sebutkan satu persatu,
terima kasih atas hiburan dari kalian semua.
14.Dan semua pihak yang banyak memberi masukan kepada penulis yang tidak
dapat penulis sebutkan satu per satu.
Akhir kata, tugas akhir ini masih jauh dari sempurna, masih banyak kesalahan
dan kekurangan, namun penulis tetap berharap semoga tugas akhir ini bisa
bermanfaat dan memberikan inspirasi bagi pengembangan selanjutnya.
Medan, 3 Juni 2010
Penulis
DAFTAR ISI
ABSTRAK... i
KATA PENGANTAR... ii
DAFTAR ISI... v
DAFTAR GAMBAR...viii
DAFTAR TABEL...x
BAB I PENDAHULUAN I.1. LatarBelakang...1
I.2. Tujuan Penulisan...1
I.3. Manfaat Penulisan... 2
I.4. Batasan Masalah... 2
I.5. Metode Penulisan... 3
I.6. Sistematika Penulisan... 3
BAB II MOTOR INDUKSI SATU FASA II.1. Umum... 5
II.2. Konstruksi Umum Motor Induksi Satu Phasa... 6
II.3. Prinsip Kerja Motor Induksi Satu Phasa... 7
II.4. Jenis jenis Motor Induksi Satu Phasa... 9
II.4.2. Motor Kapasitor Start ...12
II.4.3.Motor Kapasitor Permanen... 13
II.4.4. Motor Kapasitor Start – Kapasitor Permanen... 14
II.4.5 Motor Kutub Terarsir………….………... 15
BAB III TEORI MEDAN FLUKSI SILANG DAN TEORI MEDAN FLUKSI GANDA PADA MOTOR INDUKSI KAPASITOR PERMANEN SATU PHASA III.1. Teori dua reaksi motor induksi kapasitor permanen satu phasa... 16
III.1.1.1. Teori Medan Fluksi Silang... 16
III.1.1.2. Konsep Medan Fluksi Silang... 20
III.1.2.1. Teori Medan Fluksi Ganda... 22
III.1.2.2. Konsep Medan fluksi Ganda... 23
III.2. Rangkaian ekivalen motor kapasitor permanen... 29
III.3. Daya, rugi rugi serta efisiensi motor kapasitor permanen... 35
BAB IV ANALISA PERFORMANSI MOTOR INDUKSI KAPASITOR PERMANEN SATU PHASA DENGAN BELITAN BANTU DAN BELITAN UTAMA IV.1. Perhitungan parameter motor kapasitor permanen...40
IV.1.1. Pengujian rotor tertahan...40
IV.1.2. Pengujian beban nol...44
IV.3. Pengujian rotor tertahan...47
IV.4. Pengujian pengukuran tahanan belitan...49
IV.4.1. Pengujian pengukuran tahanan belitan utama...49
IV.4.2. Pengujian pengukuran tahanan belitan bantu...51
IV.5. Pengujian beban nol...52
IV.6. Pengujian berbeban...54
IV.7. Perhitungan performansi motor induksi satu phasa...56
BAB V PENUTUP V.1. Kesimpulan...64
V.2. Saran...64
DAFTAR PUSTAKA...65
DAFTAR GAMBAR
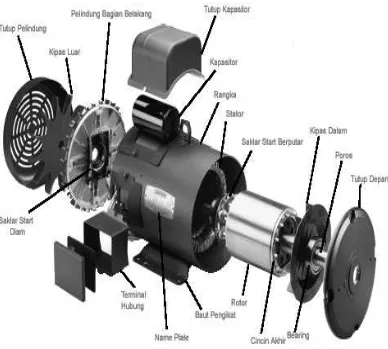
Gambar 2.1. Komponen Dasar Dari Motor Induksi Satu Phasa... 7
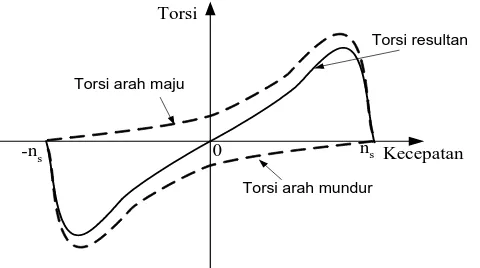
Gambar 2.2. Torsi arah maju dan torsi arah mundur...8
Gambar 2.3. Motor fasa terpisah...11
Gambar 2.4. Motor Kapasitor Star...12
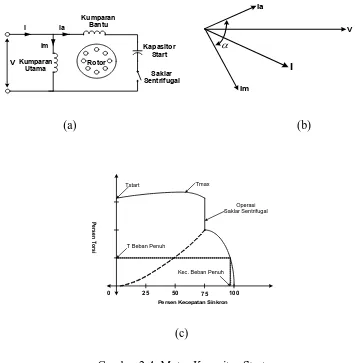
Gambar 2.5. Motor Kapasitor Permanen...13
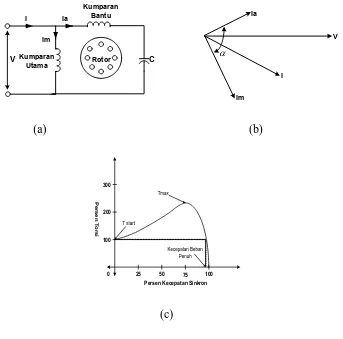
Gambar 2.6 Motor Kapasitor star-kapasitor permanen...14
Gambar 2.7. Motor kutub terarsir...15
Gambar 3.1. Medan magnet stator berpulsa sepanjang garis AC... 17
Gambar 3.2. Motor dalam keadaan berputar... 18
Gambar 3.3. Fluks rotor tertinggal terhadap fluks stator sebesar 900... 19
Gambar 3.4. Medan silang yang dibangkitkan arus-arus stator... 20
Gambar 3.5. Konsep medan fluksi silang... 21
Gambar 3.6. Konsep medan fluksi silang ganda... 24
Gambar 3.7. Konsep medan fluksi ganda yang disederhanakan... 25
Gambar 3.8. Kurva fluks resultan terhadap θ... 26
Gambar 3.9. Karakteristik Torsi – kecepatan motor induksi satu phasa... 28
Gambar 3.10. Rangkaian ekivalen dari motor kapasitor permanen... 30
Gambar 3.11. Rangkaian sederhana ekivalen motor kapasitor permanen... 32
Gambar 3.12. Diagram aliran daya motor induksi satu phasa... 38
Gambar 4.1. Gambar pendekatan rangkaian ekialen dengan rotor tertahan...41
Gambar 4.3. Gambar Pendekatan rangkaian ekivalen pada beban nol dengan s≅0..45
Gambar 4.4. Gambar pengujian rotor tertahan...47
Gambar 4.5. Gambar rangkaian pengujian tahanan belitan utama...49
Gambar 4.6. Gambar rangkaian pengujian tahanan belitan bantu...51
Gambar 4.7. Gambar rangkaian pengujian beban nol...52
DAFTAR TABEL
Tabel 4.1. Tabel distribusi empiris dari Xbr...42
Tabel 7.1. Tabel performansi motor pada keadaan nominal motor...62
ABSTRAK
Motor induksi satu phasa adalah motor yang paling banyak digunakan dalam
kehidupan sehari-hari, yang biasanya diaplikasikan pada peralatan rumah tangga,
seperti pompa air, mesin cuci dan kipas angin. Motor ini memiliki jenis yang
beragam, seperti motor kapasitor start, motor permanent atau run, motor universal,
motor split phase, dan beberapa jenis lainnya.
Motor kapasitor permanen adalah jenis motor induksi satu phasa yang
kumparan bantunya terhubung seri dengan kapasitor yang memiliki nilai tertentu.
Kapasitor digunakan sebagai pembeda phasa antara arus kumparan utama dan arus
kumparan bantu terhadap tegangan yang pada akhirnya akibat perbedaan sudut phasa
tersebut akan mempengaruhi fluksi yang dihasilkan. Ada dua kondisi fluksi yang
dihasilkan pada berbagai keadaan yang dapat dijelaskan dengan teori medan fluksi
silang dan teori medan fluksi ganda.
Konsep medan fluksi silang pada motor induksi satu phasa
menjelaskan bahwa medan silang beraksi pada sudut 90° terhadap medan magnet
stator dengan sudut phasa yang juga tertinggal 90° terhadap medan stator, kedua
medan bersatu untuk membentuk sebuah medan putar resultan yang berputar dengan
kecepatan sinkron. Sedangkan konsep medan fluksi ganda menjelaskan bahwa fluks
berpulsa yang dihasilkan, ekivalen dengan dua buah fluks yang mempunyai besar
BAB I PENDAHULUAN
I.1. Latar Belakang
Motor kapasitor adalah salah satu jenis motor induksi satu phasa yang
banyak digunakan pada mesin-mesin seperti lemari es, kompresor, pompa air,
pembakar minyak, dan mesin pencuci.
Motor kapasitor permanen adalah salah satu jenis motor induksi satu phasa
yang pemakaiannya cukup luas dimana mempunyai kapasitor secara permanen
dihubungkan seri dengan belitan bantu serta paralel dengan belitan utama. Belitan
bantu untuk pengasutan awal motor tetap terhubung dengan belitan utama ketika
berjalan. Hal ini menyederhanakan konstuksi dan mengurangi biaya serta
memperbaiki ketahanan motor karena saklar sentrifugal tidak digunakan. Faktor
kerja, denyutan momen putar, dan efisiensi akan lebih baik karena motor berputar
seperti motor dua phasa.
Pada tugas akhir ini akan di bahas analisa performansi motor induksi
kapasitor permanen satu phasa dimana perhitungannya dengan menggunakan belitan
bantu dan belitan utama. Untuk menjalankan motor induksi digunakan teori medan
fluksi silang dan teori medan fluksi ganda.
I.2. Tujuan Penulisan
Tujuan penulisan tugas akhir ini adalah untuk menganalisa performansi dari
bantu dan belitan utama. Untuk menjalankan motor induksi digunakan teori medan
fluksi silang dan teori medan fluksi ganda.
I.3. Manfaat Penulisan
Manfaat penulisan tugas akhir ini adalah :
1. Memberikan informasi secara umum kepada penulis maupun pembaca
tentang motor kapasitor permanen.
2. Menambah pengetahuan dan wawasan bagi penulis maupun pembaca tentang
performansi motor kapasitor permanen sekaligus analisa perhitungan dengan
belitan bantu dan belitan utama. Dan juga mengetahui teori medan fluksi
silang dan teori medan fluksi ganda untuk menjalankan motor induksi.
3. Selain itu dapat pula digunakan sebagai bahan acuan guna pengembangan
pratikum Mesin-mesin Listrik dan Konversi Energi Listrik di
laboratorium Konversi Energi Listrik FT-USU.
I.4. Batasan Masalah
Untuk menjaga agar pembahasan materi dalam tugas akhir ini lebih terarah
dan maksimal, maka penulis membuat suatu batasan masalah sebagai berikut :
1. Tugas akhir ini hanya membahas analisis Performansi dari motor kapasitor
permanen dengan belitan bantu dan belitan utama yang untuk menjalankan
motor digunakan teori medan fluksi silang dan teori medan fluksi ganda.
2. Tidak membahas mengenai saklar sentrifugal secara mendetail.
4. Tidak membahas karakteristik berbeban.
5. Pembahasan dilakukan seputar keluaran dari motor yang merupakan masukan
pada alat ukur.
6. Tidak membahas pengasutan dan pengaturan kecepatan motor kapasitor
permanen.
I.5. Metode Penulisan
Metode penulisan yang digunakan dalam penulisan tugas akhir ini adalah:
1. Studi Literatur, berupa studi kepustakaan dan kajian dari buku-buku teks
pendukung.
2. Studi Diskusi, berupa tanya jawab dengan Dosen Pembimbing mengenai
masalah-masalah yang timbul selama penulisan tugas akhir.
3. Studi Laboratorium, melakukan percobaan untuk mendapatkan data-data
yang diperlukan.
I.6. Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang
masalah, tujuan penulisan, batasan masalah, manfaat penulisan,
BAB II MOTOR INDUKSI SATU PHASA
Bab ini membahas tentang motor induksi satu phasa, konstruksi
umum, prinsip dasar motor induksi satu phasa, jenis-jenis motor
induksi satu phasa.
BAB III TEORI MEDAN FLUKSI SILANG DAN TEORI MEDAN FLUKSI GANDA PADA MOTOR INDUKSI KAPASITOR PERMANEN SATU PASA
Bab ini membahas tentang teori medan fluksi silang serta
konsepnya, teori medan fluksi ganda serta konsepnya, rangkaian
ekivalen motor kapasitor permanen saat dalam keadaan diam,
rangkaian ekivalen motor kapasitor permanen saat dalam keadaan
berputar, serta torsi, rugi-rugi, efisiensi dan diagram aliran daya
motor induksi kapasitor permanen.
BAB IV ANALISA PERFORMANSI MOTOR INDUKSI KAPASITOR PERMANEN SATU FASA DENGAN BELITAN BANTU DAN BELITAN UTAMA
Bab ini membahas mengenai analisis motor induksi satu phasa
kapasitor permanen dengan menggunakan belitan bantu dan belitan
utama.
BAB V KESIMPULAN DAN SARAN
Bab ini membahas tentang hal-hal yang dianggap penting didalam
tulisan yang dirangkum sebagai kesimpulan dan saran dari hasil
BAB II
MOTOR INDUKSI SATU PHASA
II.1. Umum
Motor induksi adalah motor listrik arus bolak-balik (ac) yang putaran
rotornya tidak sama dengan putaran medan stator, dengan kata lain putaran rotor
dengan putaran medan stator terdapat selisih putaran yang disebut slip. Pada
umumnya motor induksi dikenal ada dua macam berdasarkan jumlah phasa yang
digunakan, yaitu motor induksi satu phasa dan motor induksi tiga phasa. Sesuai
dengan namanya motor induksi satu phasa dirancang untuk beroperasi menggunakan
suplai satu phasa.
Motor induksi satu phasa sering digunakan sebagai penggerak pada peralatan
yang memerlukan daya rendah dan kecepatan yang relatif konstan. Hal ini
disebabkan karena motor induksi satu phasa memiliki beberapa kelebihan yaitu
konstruksi yang cukup sederhana, kecepatan putar yang hampir konstan terhadap
perubahan beban, dan umumnya digunakan pada sumber jala-jala satu phasa yang
banyak terdapat pada peralatan domestik Walaupun demikian motor ini juga
memiliki beberapa kekurangan, yaitu pembebanan yang relatif rendah, tidak dapat
melakukan pengasutan sendiri tanpa pertolongan alat bantu dan efisiensi yang
II.2. Konstruksi Umum Motor Induksi Satu Phasa
Konstruksi motor induksi satu phasa hampir sama dengan motor induksi
phasa banyak, yaitu terdiri dari dua bagian utama yaitu stator dan rotor . Keduanya
merupakan rangkaian magnetik yang berbentuk silinder dan simetris. Di antara rotor
dan stator ini terdapat celah udara yang sempit. Motor satu phasa jenis tertentu
dilengkapi dengan sebuah saklar sentrifugal. Saklar ini berguna untuk melepaskan
belitan bantu dari sumber tegangan bila kecepatan motor telah mencapai kira – kira
75% dari kecepatan sinkronnya.
Stator merupakan bagian yang diam sebagai rangka tempat kumparan stator
terpasang. Bagian ini terdiri atas : inti stator, kumparan stator dan alur stator. Motor
induksi satu phasa dilengkapi dengan dua kumparan stator yang dipasang terpisah,
yaitu kumparan utama atau sering disebut dengan kumparan berputar dan kumparan
bantu yang sering disebut dengan kumparan start. Rotor merupakan bagian yang
berputar. Bagian ini terdiri atas inti rotor, belitan rotor dan alur rotor. Terdapat dua
jenis rotor yaitu rotor belitan( Wound Rotor ) dan rotor sangkar ( Squirrel CagRotor).
Gambar 2.1. Komponen Dasar dari Motor Induksi Satu Phasa
II.3. PRINSIP KERJA MOTOR INDUKSI SATU PHASA
Ketika kumparan stator di suplai dengan sumber tegangan satu phasa maka
mengalir arus, dan arus tersebut akan menimbulkan fluks. Fluks ini tidak berputar
(tidak menimbulkan medan putar), akan tetapi merupakan resultan dari fluks
bergerak arah maju dan arah mundur. Hal ini dapat dijelaskan dengan persamaan
Euler.
2
e adalah merupakan fluks bergerak arah maju, sedangkan
2
m
φ . jθ e−
merupakan fluks bergerak arah mundur. Jumlah dari kedua fluks tersebut
merupakan fluks resultan atau fluks pulsasi yang besarnya adalah :
=
Komponen dari kedua fluksi tersebut yang bergerak berlawanan arah dengan
kecepatan sudut ( tω )yang sama, tentunya akan menghasilkan torsi yang sama,
dan berlawanan arah ( torsi arah maju dan torsi arah mundur ). Perhatikan
gambar 2.2.
Kecepatan Torsi
0 ns
-ns
Torsi arah maju
Torsi arah mundur
Torsi resultan
Torsi resultan (TR) yang dihasilkan torsi maju (Tf) dan torsi mundur (Tb)
adalah:
TR = Tf + Tb ...(2.4)
TR pada dasarnya mempunyai kemampuan untuk menggerakan motor dengan
arah maju atau arah mundur. Pada waktu start, besar torsi maju sama dengan torsi
mundur. Dengan demikian motor tetap saja diam (tidak berputar). Dengan
menggunakan sedikit tenaga yang digerakkan dengan alat bantu dan dapat
menyebabkan motor berputar arah maju atau mundur. Penggunaan alat bantu tersebut
yaitu dengan cara menambah kumparan bantu yang terhubung paralel dengan
kumparan utama. Kemudian di tambahkan juga kapasitor yang terhubung seri dengan
kumparan bantu tersebut. Kapasitor berguna sebagai pembeda phasa antara arus
kumparan utama dan arus kumparan bantu terhadap tegangan yang pada akhirnya
akibat perbedaan sudut phasa tersebut tentu akan mempengaruhi fluksi yang
dihasilkan.yang pada akhirnya dihasilkan torsi yang tidak sama besarnya sehingga
motor pun berputar.
II.4. JENIS JENIS MOTOR INDUKSI SATU PHASA
Cara yang paling mudah untuk menjalankan motor induksi satu phasa adalah
dengan menambahkan sebuah belitan bantu pada belitan utama di stator sehingga
motor dapat dijalankan. Jika dua belitan terpisah sebesar 90° listrik pada stator motor
dan dieksitasi dengan dua ggl bolak-balik yang berbeda waktu phasa sebesar 90°
listrik, dihasilkan medan magnetik putar. Jika dua belitan yang terpisah demikian
bolak-balik, tetapi tidak berputar karena kedua belitannya ekivalen dengan satu
belitan satu fasa. Akan tetapi, jika suatu impedansi dihubungkan seri dengan salah
satu belitan ini, arusnya akan berbeda fasa. Dengan pemilihan impedansi yang cocok,
arus dapat dibuat agar berbeda fasa sampai 90° listrik, sehingga menghasilkan medan
putar sama seperti medan dari motor dua phasa. Inilah prinsip dari pemisahan fasa
(Phase Splitting).
Pada keadaan berputar, motor induksi satu phasa dapat menghasilkan momen
putar dengan hanya satu belitan. Sehingga dengan bertambahnya kecepatan motor
belitan bantu dapat dilepas dari rangkaian. Pada kebanyakan motor, hal ini
dilakukan dengan menghubungkan sebuah saklar sentrifugal pada rangkaian bantu.
Pada sekitar 70 sampai 80 persen kecepatan sinkron, saklar sentrifugal bekerja dan
melepaskan hubungan belitan bantu dari sistem.
Motor induksi satu phasa dikenal dengan beberapa nama. Penamaannya
menjelaskan cara-cara yang dipakai untuk menghasilkan perbedaan phasa antara arus
yang mengalir pada belitan utama dan arus yang mengalir pada belitan bantu.
II.4.1. Motor Fasa Terpisah
Diagram rangkaian dari motor induksi fasa terpisah ditunjukkan pada
gambar 2.3.a. Belitan bantu memiliki perbandingan tahanan terhadap
reaktansi yang lebih tinggi daripada belitan utama, sehingga kedua arus akan
berbeda fasa seperti yang ditunjukkan pada gambar 2.3.b. Perbandingan
tahanan terhadap reaktansi yang tinggi didapat dengan menggunakan kawat
yang lebih murni pada belitan bantu. Hal ini diijinkan karena belitan bantu
rangkaian segera setelah dicapai kecepatan sinkron sebesar sekitar 70 sampai
80 persen kecepatan sinkron.
Karakteristik momen putar vs kecepatan dari motor ini ditunjukkan
pada gambar 2.3.c.Gambar ini memperlihatkan nilai torsi masing-masing
kecepatan motor, mulai dari posisi diam sampai kecepatan nominal, dan
seterusnya sampai kecepatan sinkron. Torsi start adalah torsi yang tersedia
bila motor mulai berputar dari posisi diam. Torsi beban penuh adalah torsi
yang dihasilkan bila motor berputar pada keluaran nominal, dan kecepatan
motor pada keluaran itu disebut dengan kecepatan nominal. Nilai maksimum
dari torsi dalam hal ini disebut torsi maksimum Tmaks.
Rotor
Persen Kecepatan Sinkron
Operasi Torsi Beban Penuh
Kecepatan Beban
II.4.2. Motor Kapasitor Start
Momen putar start yang lebih tinggi dapat diperoleh dengan
menghubungkan sebuah kapasitor yang dipasang secara seri dengan belitan
bantu seperti yang ditunjukkan pada gambar 2.4.a. Hal ini akan menaikkan
sudut fasa antar arus belitan seperti yang ditunjukkan pada gambar 2.4.b.
Karakteristik momen put ar – kecepatan dari motor ini dapat ditunjukkan pada
gambar 2.4.c. Karena kapasitor dipakai hanya pada saat start, jenis kapasitor
yang dipakai adalah kapasitor elektrolit. Motor ini menghasilkan momen
putar start yang lebih tinggi.
Saklar
Persen Kecepatan Sinkron
25 50 75 100
Kec. Beban Penuh T Beban Penuh
(c)
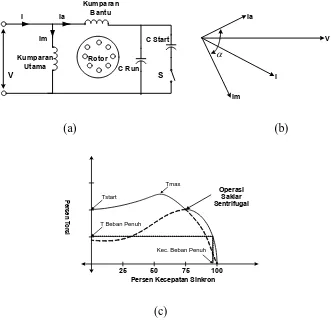
II.4.3. Motor Kapasitor permanen
Pada motor ini seperti yang ditunjukkan pada gambar 2.5.a. kapasitor
dihubungkan seri dengan belitan bantu dan tidak dilepas setelah pengasutan
dilakukan dan tetap tinggal pada rangkaian. Hal ini menyederhanakan
konstruksi dan mengurangi biaya serta memperbaiki ketahanan motor karena
saklar sentrifugal tidak digunakan. Faktor kerja, denyutan momen putar, dan
efisiensi akan lebih baik karena motor berputar seperti motor dua fasa. Sudut
fasa antar belitan ditunjukkan pada ganbar 2.5.b. Jenis kapasitor yang
digunakan adalah kapasitor kertas. Karakteristik momen putar – kecepatan dari
motor ini ditunjukkan pada gambar 2.5.c.
C
Persen Kecepatan Sinkron
25 50 75 100
II.4.4. Motor Kapasitor Start – Kapasitor Permanen
Motor ini mempunyai dua buah kapasitor, satu digunakan pada saat
start dan satu lagi digunakan pada saat berputar, seperti yang ditunjukkan
pada gambar 2.6.a. Secara praktis keadaan start dan berputar yang optimal
dapat diperoleh dengan menggunakan dua buah kapasitor elektrolit. Kapasitor
run secara permanen dihubungkan seri dengan belitan bantu dengan nilai
yang lebih kecil dan dipakai kapasitor kertas. Sudut fasa antar belitan sama
seperti pada motor kapasitor permanen seperti pada gambar 2.6.b.
Karakteristik momen putar – kecepatan dari motor ini ditunjukkan pada
gambar 2.6.c.
Rotor
Persen Kecepatan Sinkron
25 50 75 100
T Beban Penuh
Kec. Beban Penuh
(c)
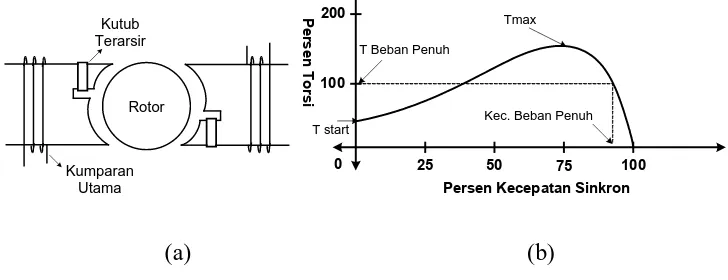
II.4.5. Motor Kutub Terarsir
Motor ini mempunyai kutub tonjol dan sebagian dari masing – masing
kutub dikelilingi oleh lilitan rangkaian terhubung singkat yang terbuat dari
tembaga yang disebut kumparan terarsir seperti pada gambar 2.7.a. Arus
imbas yang terdapat pada kumparan yang terarsir menyebabkan fluksi yang
berada pada bagian lain. Hasilnya seperti medan putar yang bergerak dalam
arah dari daerah kutub yang tidak terarsir ke bagian kutub yang terarsir dan
menimbulkan momen putar saat dihidupkan yang kecil. Karakteristik momen
putar – kecepatan motor kutub terarsir ditunjukkan pada gambar 2.7.b.
Rotor Kumparan
Utama Kutub Terarsir
T start
100 200
Persen Kecepatan Sinkron 25 50 75 100
Pe
rs
e
n
T
o
rs
i
0
Tmax
T Beban Penuh
Kec. Beban Penuh
(a) (b)
BAB III
TEORI MEDAN FLUKSI SILANG DAN TEORI MEDAN FLUKSI GANDA PADA MOTOR INDUKSI KAPASITOR PERMANEN
SATU PASA
III.1. TEORI DUA REAKSI MOTOR INDUKSI KAPASITOR PERMANEN SATU PASA
Pada awalnya bahwa motor ini dalam keadaan diam karena supply yang
diberikan adalah satu phasa, berbeda dengan sumber dua phasa ataupun tiga phasa,
maka yang harus dipikirkan adalah bagaimana menjalankan motor tersebut dengan
berbagai cara dan kemungkinan yang harus dilakukan. Pada penelitian ini digunakan
kapasitor sebagai pembeda phasa antara arus kumparan utama dan arus kumparan
bantu terhadap tegangan yang pada akhirnya akibat perbedaan sudut phasa tersebut
tentu akan mempengaruhi fluksi yang dihasilkan. Adapun kondisi fluksi yang
dihasilkan pada berbagai keadaan adalah sebagai berikut.
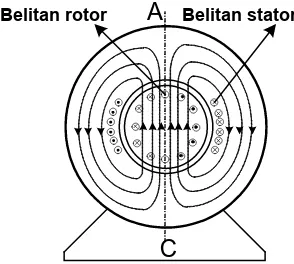
III.1.1.1. TEORI MEDAN FLUKSI SILANG
Prinsip kerja motor induksi satu fasa dapat dijelaskan dengan menggunakan
teori medan putar silang (cross-field theory). Jika suatu motor induksi satu fasa
diberikan tegangan ac satu fasa maka arus sinusoidal terhadap waktu akan mengalir
pada belitan tersebut. Arus stator ini akan menghasilkan medan magnet seperti yang
C A
Belitan rotor Belitan stator
Gambar 3.1. Medan Magnet Stator Berpulsa Sepanjang Garis AC.
Arus stator yang mengalir pada setengah periode pertama akan membentuk
kutub utara di A dan kutub selatan di C pada permukaan stator. Pada setengah
periode berikutnya, arah kutub-kutub stator menjadi terbalik. Meskipun kuat medan
magnet stator adalah selalu berubah-ubah yaitu maksimum pada saat arus maksimum
dan nol pada saat arus nol dan polaritasnya berbalik secara periodik, aksi ini hanya
terjadi sepanjang sumbu AC. Dengan demikian, medan magnet ini tidak berputar
tetapi hanya merupakan sebuah medan magnet berpulsa pada posisi yang tetap
(stationary).
Seperti halnya pada transformator, tegangan terinduksi pada belitan sekunder,
dalam hal ini belitan rotor. Karena rotor dari motor induksi satu fasa adalah rotor
sangkar dimana belitannya telah terhubung singkat, maka aruspun mengalir. Sesuai
dengan hukum Lenz, arah dari arus ini (seperti yang ditunjukkan pada gambar 3.1)
adalah sedemikian rupa sehingga medan magnet yang dihasilkannya menentang
magnet rotor dan membentuk kutub pada permukaan rotor. Karena
kutub ini juga berada pada sumbu AC dengan arah yang berlawanan terhadap
kutub-kutub stator, maka tidak ada momen putar yang dihasilkan pada kedua arah, rotor
tetap diam. Dengan demikian, motor induksi satu fasa tidak dapat diasut sendiri dan
membutuhkan rangkaian bantu untuk menjalankannya. Dimana rangkaian bantu ini
juga dapat dilengkapi dengan komponen lain dalam meningkatkan unjuk kerja motor
itu sendiri seperti halnya dalam penelitian ini menggunakan kapasitor baik dalam
startnya saja dan juga run ataupun menggunakan keduanya secara bersamaan.
Arah putaran
B D
C A
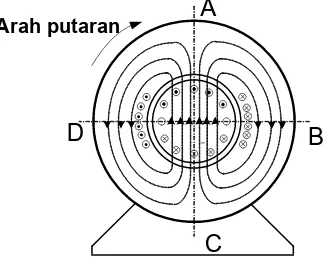
Gambar 3.2. Motor Dalam Keadaan Berputar
Misalnya sekarang motor sedang berputar. Hal ini dapat dilakukan dengan
memutar rotor dengan tangan ataupun dengan rangkaian bantu.
Konduktor-konduktor rotor memotong medan magnet stator sehingga timbul gaya gerak listrik
pada konduktor-konduktor tersebut. Hal ini diperlihatkan pada gambar 3.2 yang
menunjukkan rotor sedang berputar searah jarum jam.
Jika fluks stator seperti yang diperlihatkan pada gambar 3.2 mengarah ke
atas, maka sesuai dengan kaidah tangan kanan Fleming, arah gaya gerak listrik (ggl)
rotor akan mengarah keluar kertas pada setengah bagian atas rotor dan mengarah ke
arah dari gaya gerak listrik yang dibangkitkan akan terbalik. Gaya gerak listrik yang
diinduksikan ke rotor adalah berbeda dengan arus dan fluks stator. Karena
konduktor-konduktor rotor terbuat dari bahan dengan tahanan rendah dan induktansi
tinggi, maka arus rotor yang dihasilkan akan tertinggal terhadap gaya gerak listrik
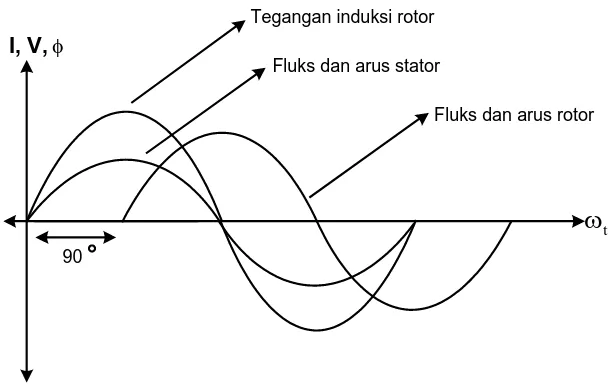
rotor mendekati 90o. Gambar 3.3 menunjukkan hubungan fasa dari arus dan fluks
stator, gaya gerak listrik, arus dan fluks rotor.
90
Tegangan induksi rotor
Fluks dan arus stator
Fluks dan arus rotor
I, V,φ
t
ω
Gambar 3.3. Fluks Rotor Tertinggal Terhadap Fluks Stator Sebesar 90°.
Sesuai dengan kaidah tangan kanan Fleming, arus rotor ini akan
menghasilkan medan magnet, seperti yang ditunjukkan gambar 3.5. Karena medan
rotor ini terpisah sebesar 90o dari medan stator, maka disebut sebagai medan silang
(cross field). Nilai maksimum dari medan ini seperti yang ditunjukkan oleh gambar
3.3, terjadi pada saat seperempat periode setelah gaya gerak listrik rotor yang
dibangkitkan adalah telah mencapai nilai maksimumnya. Karena arus rotor yang
mengalir disebabkan oleh suatu gaya gerak listrik bolak-balik maka medan magnet
yang dihasilkan oleh arus ini adalah juga bolak-balik dan aksi ini terjadi sepanjang
Arah putaran
B D
C A
Gambar 3.4. Medan Silang yang Dibangkitkan Arus-Arus Stator
III.1.1.2. KONSEP MEDAN FLUKSI SILANG (Cross revolving field method)
Untuk dapat menganalisa parameter dan prinsip kerja dari motor induksi satu
phasa salah satu konsep yang dapat dilakukan adalah dengan metode medan fluksi
silang. Pada metode ini akan dijelaskan bagaimana aliran fuksi yang terjadi dalam
setiap arah putarnya. Agar lebih jelas dapat memperhatikan gambar 3.5.
Karena medan silang beraksi pada sudut 90o terhadap medan magnet stator
dengan sudut fasa yang juga tertinggal 90o terhadap medan stator, kedua medan
bersatu untuk membentuk sebuah medan putar resultan yang berputar dengan
kecepatan sinkron seperti yang ditunjukkan pada gambar 3.5.
Pada praktiknya bahwa sudut phasa antara fluksi rotor tertinggal terhadap
fluksi stator. Dimana medan fluksi yang diinduksikan pada rotor terjadi setelah
mencapai siklus atau sudut lebih dari 80 atau (0 〉 800). Untuk memperjelas teori
(a). Induksi arus rotor dua pole (b). Grafik medan stator dan medan silang
tertinggal sejauh 80 . pada rotor terhadap derajat waktu. 0
(1) (2)
(3) (4)
(c). Phasor medan fluksi yang dihasilkan oleh belitan stator dan rotor
III.1.2.1 TEORI MEDAN FLUKSI GANDA (Double revolving field theory)
Tegangan satu phasa yang dicatu ke belitan stator motor induksi satu phasa
tidak akan mampu membuat rotornya berputar. Dengan demikian, motor induksi satu
phasa tidak dapat diasut sendiri dan membutuhkan rangkaian Bantu untuk
menjalankannya. Akan tetapi sekali rotor diputar di dalam medan magnet berpulsa,
motor akan segera meneruskan putarannya dan membangkitkan torsi. Hal ini dapat
dijelaskan dengan teori medan putar ganda.
Teori medan fluksi ganda (Double revolving-field theory) adalah suatu
metode lain untuk menganalisa prinsip perputaran motor induksi satu fasa disamping
teori medan putar silang. Menurut teori ini, medan magnet yang berpulsa dalam
waktu tetapi diam dalam ruangan dapat dibagi menjadi dua medan magnet, dimana
besar kedua medan magnet itu sama dan berputar dengan berlawanan arah. Dengan
kata lain, suatu fluks sinusoidal bolak-balik dapat diwakili oleh dua fluks yang
berputar, yang masing-masing besarnya sama dengan setengah dari nilai fluksi
bolak-balik tersebut dan masing-masing berputar secara sinkron dengan arah
berlawanan. Hal ini dapat dijelaskan dengan persamaan Euler.
Menurut persamaan Euler :
2
θ θ
θ ej e j
Cos
−
+
= ………...(3.1)
Dengan asumsi, jθ
e mewakili vektor yang berputar searah jarum jam dan
θ
j
) (
2
2 maks j2 t j2 t
maksCos t e e
ω ω
φ ω
φ = + − …...(3.2)
Dari persamaan di atas, terlihat bahwa fluks yang terjadi terdiri atas dua
bagian yang sama besar (setengah harga total) dan dengan arah saling
bertolak-belakang.
III.1.2.2. KONSEP MEDAN FLUKSI GANDA (Double revolving field method)
Untuk memperjelas teori medan fuksi ganda dapat memperhatikan grafik arah
jalannya fluksi seperti gambar 3.6. Teori ini menjelaskan bahwa saat terjadi medan
fluksi maju maka bersamaan dengan itu akan dihasilkan medan fluksi lawannya atau
medan fluksi mundur. Hal ini dapat dijelaskan dengan diagram medan fluksi dan
persamaan berikut ini.
(a). Stator dua kutub dan induksi (b). Grafik resultan medan fluksi maju dan
(1) (2) (3)
(4) (5)
(c). Prinsip medan fluksi ganda
Gambar 3.6. Konsep Medan Fluksi Ganda (Forward-backward revolving field
theory)
Konsep medan fluksi diatas dapat juga dijelaskan dengan gambar 3.7. Pada
gambar 3.7 menunjukkan suatu fluksi bolak-balik yang mempunyai nilai maksimum φm. Komponen-komponen fluksnya A dan B mempunyai nilai yang sama yaitu φm/2,
berputar dengan arah yang berlawanan dan searah perputaran jarum jam, seperti
A= m/2
Gambar 3.7. Konsep Medan Fluksi Ganda yang Disederhanakan.
Pada beberapa saat ketika A dan B telah berputar dengan sudut +θ dan -θ
seperti pada gambar 3.7.b, maka besar fluks resultannya adalah :
Setelah seperempat periode putaran, fluks A dan B akan berlawanan arah
seperti yang ditunjukkan pada gambar 3.7.c, sehingga resultan fluksnya sama
dengan nol. Setelah setengah periode putaran, fluks A dan B akan mempunyai
resultan sebesar –2 x φm/2 = -φm, seperti yang ditunjukkan oleh gambar 3.7.d.
Setelah tiga perempat putaran, resultannya akan kembali nol seperti yang
ditunjukkan pada gambar 3.7.e dan demikianlah seterusnya. Jika nilai-nilai dari
fluks resultan digambarkan terhadapθ diantara θ = 0o sampai θ = 360o, maka
akan didapat suatu kurva seperti yang ditunjukkan pada gambar 3.8.
.
0o
90o 180o 270o 360 o
Fl
uk
s
Gambar 3.8. Kurva Fluks Resultan Terhadapθ
Pada keadaan jalan jelas terlihat perbedaan slip yang dihasilkan saat maju dan
mundur. Dimana perbedaan slip yang terjadi adalah akibat fluks yang dihasilkan
putaran rotor. Diketahui bahwa putaran rotor yang terjadi adalah akibat interaksi dua
fluksi magnet yang berlawan arah yaitu satu saat arah maju ( Forward revolving
field) dan yang lain adalah fluksi magnet pada arah mundur berlawanan dengan saat
maju ( Backward revolving field).Saat rotor berputar dengan arah maju (φf ) , maka
menentang fluksi magnet saat arah maju tersebut. Resultan kedua fluksi yang terjadi
dapat dirumuskan dengan persamaan :
b f
R φ φ
φ = + ..………...(3.5)
Akibat kedua fluksi magnet yang dihasilkan, maka slip yang dihasilkan juga
akan berbeda yang diperoleh dengan persamaan dibawah ini :
Dimana kecepatan sinkron dapat diperoleh dengan persamaan:
p
Slip pada keadaan fluksi magnet maju (Forward revolving field) adalah :
s
n = Kecepatan putar rotor saat medan fluksi maju (rpm)
Sedangkan slip pada keadaan fluksi magnet mundur ( Backward revolving
=
Masing-masing dari kedua komponen fluks tersebut memotong konduktor
rotor sehingga menginduksikan ggl dan pada akhirnya menghasilkan torsi tersendiri.
Kedua torsi mempunyai arah yang saling berlawanan seperti yang ditunjukkan pada
gambar 3.8. Pada keadaan diam kedua komponen torsi tersebut sama besarnya,
sehingga torsi resultan asut adalah nol. Pada saat motor berputar, besar kedua
komponen torsi tesebut tidaklah sama sehingga torsi resultan membuat motor tetap
berputar pada putarannya.
Kecepatan Torsi
0 ns
-n
s
Torsi arah maju
Torsi arah mundur
Torsi resultan
III.2. RANGKAIAN EKIVALEN MOTOR KAPASITOR PERMANEN
Telah diketahui bahwa bagaimana medan magnet berpulsa yang diam dapat
diperoleh dengan dua medan putar yang saling berlawanan. Kedua kedua kumparan
utama dan kumparan bantu dieksitasi, kedua kumparan akan menghasilkan sepasang
medan putar arah maju dan arah mundur. Pada gambar 3.10. terlihat bahwa
kumparan bantu dan utama paralel. Kapasitor terhubung seri dengan kumparan
bantu, dan slama motor beroperasi tidak dilepas dengan kumpran bantunya. Dari
gambar tersebut didapat rangkaian ekivalen seperti pada gambar 3.11. Maka
Sehingga tiap-tiap kumparan dapat ditunjukkan dengan suatu rangkaian ekivalen
dengan dua percabangan paralel, satu untuk medan arah maju, dan satu lagi untuk
medan arah mundur. Suatu medan putar, tanpa memperhatikan dari kumparan mana
medan tersebut dihasilkan akan menghasilkan tegangan pada kedua kumparan. Mari
kita asumsikan bahwa kumparan bantu ditempatkan tertinggal sebesar 90o listrik
terhadap kumparan utama. Kemudian medan arah maju yang dihasilkan oleh
kumparan bantu akan menginduksikan tegangan pada kumparan utama, yang mana
akan tertinggal 90o listrik dari tegangan yang dihasilkan oleh medan yang sama
dalam kumparan bantu.. Rangkaian ekivalen dari motor kapasitor permanen
C
Gambar 3.10. Rangkaian Ekivalen dari Motor Kapasitor Permanen
dimana :
1
V~ = tegangan jala-jala masukan motor.
r1 , x1 = resistensi dan reaktansi bocor kumparan utama stator.
Xm = reaktansi magnetisasi.
r2 , x2 = resistansi dan reaktansi rotor dilihat dari sisi stator.
Xc = reaktansi kapasitor permanen.
a = konstanta perbandingan belitan kumparan bantu dengan belitan
kumparan utama.
1
~
E = tegangan yang diinduksikan dalam cabang arah maju dari kumparan
utama oleh medan putar arah maju dari kumparan bantu.
2
~
E = tegangan yang diinduksikan dalam cabang arah mundur dari kumparan
utama oleh medan putar arah mundur dari kumparan bantu.
3
E = tegangan yang diinduksikan dalam cabang arah mundur dari kumparan
bantu oleh medan putar arah maju dari kumparan utama.
Rugi – rugi inti Rc dari motor tidak ditunjukkan dan akan digabungkan
dengan rugi-rugi putaran motor. Catat bahwa kecocokan parameter dari kumparan
bantu pada gambar 3.10. telah didefenisikan melalui perbandingan transformasi (a)
dari parameter-parameter kumparan utama. Impedansi arah maju dari kumparan
utama adalah :
Impedansi arah mundur dari kumparan utama adalah :
)
Pada gambar 3.11. diperlihatkan rangkaian ekivalen dengan Zˆ dan f Zˆb.
1
I ~
= arus pada kumparan utama.
1
I ~
= arus pada kumparan bantu.
a
Zˆ = resistansi kumparan bantu dan reaktansi ekivalen dari kapasitor.
+
Gambar 3.11. Rangkaian Sederhana Ekivalen Motor Kapasitor Permanen
Tegangan yang diinduksikan dalam kumparan utama oleh medan putar arah
maju adalah :
f fm I Z
E~ =~1ˆ ………..…..(3.11)
Tegangan yang diinduksikan dalam kumparan utama oleh medan putar arah
mundur adalah :
b bm I Z
E~ =~1ˆ ………(3.12)
Tegangan yang diinduksikan dalam kumparan bantu oleh medan putar arah
maju adalah :
f fa I a Z
Tegangan yang diinduksikan dalam kumparan bantu oleh medan putar arah
mundur adalah :
b ba I a Z
E~ =~2 2 ˆ ……….(3.14)
Karena kumparan utama ditempatkan mendahului 90o listrik dari kumparan
bantu, tegangan yang diinduksikan dalam kumparan utama oleh medan putar arah
maju dari kumparan bantu harus tertinggal 90o listrik dari tegangan yang
diinduksikan oleh medan yang sama dalam kumparan bantu. Lagipula, tegangan
yang diinduksikan dalam kumparan utama harus sebesar 1/a kali dari tegangan yang
diinduksikan dalam kumparan bantu, yaitu :
f fa jaI Z
E a j
E~1 =− 1 ~ =− ~2 ˆ ………(3.15)
Dengan hal yang sama, tegangan yang diinduksikan dalam kumparan utama
oleh medan putar arah maju yang dihasilkan oleh kumparan bantu harus mendahului
sebesar 90o listrik dari tegangan yang diinduksikan dalam kumparan bantu, yaitu :
b ba jaI Z E
a j
E~2 = 1 ~ = ~2 ˆ ...(3.16)
Dengan cara yang sama, tegangan yang diinduks ikan dalam cabang arah maju
dari kumparan bantu oleh medan putar arah maju dari kumparan utama adalah :
f
Z I ja
E~3 = ~1ˆ ………(3.17)
Akhirnya, tegangan yang diinduksikan dalam kumparan bantu oleh medan
arah mundur dari kumparan utama adalah :
b Z I ja
Karena semua tegangan telah diketahui dalam kaitan dengan arus dan
parameter rangkaian yang tidak diketahui, penyamaan bersama untuk kedua cabang
adalah :
Persamaan-persamaan diatas dapat ditulis kembali menjadi :
1
Dari penyamaan-penyamaan bersama di atas, kita dapat menghitung besar
arus dalam kedua cabang sebagai :
21
Arus masukan adalah :
III. 3. DAYA, RUGI RUGI SERTA EFISIENSI MOTOR KAPASITOR PERMANEN
Dari gambar 3.12 Diagram aliran daya motor induksi satu phasa, daya
masukan motor adalah : θ cos
1 L
in V I
P = ……….(3.30)
Dimana θ adalah sudut faktor daya dimana arus masukan tertinggal dari
tegangan suplai.
Tegangan pada kapasitor permanen adalah:
2
Rugi-rugi tembaga stator adalah :
a
Jika rugi-rugi tembaga stator dikurangi dari daya masukan, daya yang melalui
celah udara dapat diperoleh, yang mana dibagi dua antara medan putar arah maju dan
medan putar arah mundur. Bagaimanapun, kita dapat menulis suatu persamaan untuk
daya yang melalui celah udara sama seperti pada operasi motor satu fasa dengan satu
kumparan. Kita juga harus memperhitungkan bahwa adanya tegangan induksi dalam
suatu kumparan berdasarkan pada medan-medan yang dihasilkan oleh kumparan
yang lain. Dengan dasar inilah, daya yang melalui celah udara yang dihasilkan
berdasarkan pada medan putar arah maju dari kumparan utama adalah :
Dengan hal yang sama, daya yang melalui celah udara arah maju
berdasarkan pada kumparan bantu adalah :
]
Sehingga, daya yang mengalir melalui celah udara total berdasarkan pada
medan putar arah maju dari kedua kumparan utama dan kumparan bantu adalah :
]
Dengan hal yang sama, daya yang mengalir melalui celah udara total
berdasarkan pada medan putar arah mundur dari kedua kumparan utama dan
kumparan bantu adalah :
]
Suatu hubungan yang sangat bermanfaat diperoleh jika kita mengevaluasi
persamaan untuk daya yang melalui celah udara dengan menyatakan arus pada
kumparan utama dan kumparan bantu sebagai :
1
kumparan bantu berkenaan dengan tegangan suplai. Daya yang melalui celah udara
berdasarkan pada medan arah maju dapat ditulis kembali sebagai :
Pgf =Re[(~I1Zˆf − jaI~2Zˆf)~I1* +(~I2a2Zˆf + jaI~1Zˆf)I~2*]
= (I12 +a2I22)Rf +2aI1I2Rf sinθ21 ………..(3.39)
dimana θ21 = θ2 - θ1.
Dengan hal yang sama, kita dapat menulis kembali persamaan dari daya yang
melalui celah udara berdasarkan pada medan arah maju dapat ditulis kembali
sebagai:
Daya bersih yang melalui celah udara adalah :
gb
Dalam keadaan diam (seperti kondisi saat rotor tertahan), slip per unit dari
motor adalah kesatuan dan impedansi rotor dalam cabang arah maju dan mundur
adalah sama. Daya bersih yang melalui celah udara yang dihasilkan motor adalah :
21
Catat bahwa daya bersih yang dikembangkan adalah bentuknya sesuai dengan
sudut sinus antara arus dalam kedua kumparan. Daya yang dihasilkan adalah
maksimum ketika sudutnya sebesar 90o. Akan tetapi dalam motor fasa terpisah,
sudutnya antara 30o sampai 45o. Hal ini mengapa motor kapasitor dengan ukuran
yang sama dapat mengembangkan torsi start yang lebih besar dibandingkan dengan
motor fasa terpisah.
Torsi motor adalah perbedaan antara torsi arah maju dengan torsi arah
mundur, yang dirumuskan sebagai berikut :
b
f T
T
sync
Pada saat start slip = 1, dan Rf = Rb. Dari persamaan 3.42 dan persamaan
3.44, maka torsi start motor adalah :
sync
Daya mekanis yang dihasilkan motor adalah :
T
Dan daya keluaran dari motor adalah:
Pout = Pm – Prot ……….(3.48)
Untuk lebih jelasnya, dapat dilihat pada gambar diagram aliran daya motor
dibawah ini : gesek dan angin Rugi - rugi
inti
Rugi - rugi putaran θ
Sehingga efisiensi motor adalah :
% 100 x P P
in out
=
BAB IV
ANALISA PERFORMANSI MOTOR INDUKSI KAPASITOR PERMANEN SATU PHASA DENGAN BELITAN BANTU DAN BELITAN UTAMA
IV.1. PERHITUNGAN PARAMETER MOTOR KAPASITOR PERMANEN
Parameter induksi satu fasa dapat diperoleh melalui pendekatan parameter
rangkaian ekivalen motor induksi satu fasa dari hasil pengujian beban nol dan
pengujian rotor tertahan. Kedua pengujian ini hampir sama seperti yang dilakukan
pada motor induksi fasa banyak. Pengujian ini dilakukan untuk memperoleh
parameter dari kumparan utama dan kumparan bantu. Pengujian ini hanya dilakukan
dengan hanya mensuplai tegangan satu fasa pada kumparan utama saja.
IV.1.1. Pengujian Rotor Tertahan ( block rotor test )
Pada pengukuran hubung singkat, rotor dipaksa tidak berputar (nm =0,s=1).
Pengujian dilakukan pada frekuensi kerja dengan tegangan kerja. Jika kita asumsikan
bahwa reaktansi magnetik Xm adalah sangat besar dibandingkan dengan reaktansi
rotor sehingga arus yang melalui Xm sangat kecil dan dapat diabaikan, rangkaian
ekivalen dapat diperlihatkan pada Gambar 4.1
Dengan kondisi rotor tertahan, harga-harga yang diukur adalah tegangan rotor
tertahan Vbr, arus rotor tertahan Ibr, dan rugi-rugi yang hilang Pbr. Sehingga
impedansi rotor tertahan dapat dihitung dengan :
br br br
I V
Z = ………. (4.1)
2
br br br
I P
R = ………. (4.2)
Kemudian reaktansi rotor tertahan :
2 2
br br
br Z R
X = − ………. (4.3)
Ibr R1 X1 If 0,5 X2
0,5 R2
0,5 X2
0,5 R2
Vbr
Gambar 4.1. Gambar Pendekatan Rangkaian Ekivalen dengan Rotor Tertahan
Dari rangkaian ekivalen pada Gambar 4.1 diperlihatkan :
2
1 R
R
Rbr = + ... (4.4)
2
1 X
X
Xbr = + ... (4.5)
Untuk memperoleh harga R1 dilakukan dengan pengukuran DC yaitu dengan
menghubungkan sumber tegangan DC (Vdc) pada dua terminal input dan diukur arus
DC-nya (Idc). Di sini tidak mengalir arus rotor karena tidak ada tegangan yang
terinduksi. Harga R1 dapat dihitung sebagai berikut :
dc dc
I V
Harga r1 ini dinaikkan dengan faktor pengali 1,1 - 1,5 untuk operasi arus
bolak-balik, karena pada operasi arus bolak-balik resistansi konduktor meningkat
karena distribusi arus yang tidak merata akibat efek kulit dan medan magnet yang
melintasi alur. Dari harga r1 ini harga r2 dapat ditentukan :
1
2 R R
R = br − ... (4.7)
Untuk menentukan harga X1 dan X2 digunakan metode empiris berdasarkan
NEMA Standard 112. Hubungan X1 dan X2 terhadap Xbr dapat dilihat pada Tabel 4.1.
Tabel 4.1 Distribusi empiris dari Xbr.
Desain Rotor X1 X2
A
B
C
D
Rotor Belitan
0,5 Xbr
0,4 Xbr
0,3 Xbr
0,5 Xbr
0,5 Xbr
0,5 Xbr
0,6 Xbr
0,7 Xbr
0,5 Xbr
0,5 Xbr
Dikutip dari Buku Electric Machinery Fundamentals karangan Stephen J.Chapman
Perbedaan dari masing – masing kelas motor induksi adalah sebagai berikut :
1. Kelas A : Torsi start normal, arus start normal dan slip kecil
Tipe ini umumnya memiliki tahanan rotor sangkar yang rendah. Slip pada
biasanya sekitar 21% dari torsi beban penuh dan slipnya kurang dari 21%.
Motor kelas ini berkisar hingga 20 Hp.
2. Kelas B : Torsi start normal, arus start kecil dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A tetapi arus startnya berkisar
75%Ifl . Slip dan efisiensi pada beban penuh juga baik. Kelas ini umumnya
berkisar antara 7,5 Hp sampai dengan 200 Hp. Penggunaan motor ini antara
lain : kipas angin, boiler, pompa dan lainnya.
3. Kelas C : Torsi start tinggi dan arus start kecil
Kelas ini memiliki resistansi rotor sangkar yang ganda yang lebih besar
dibandingkan dengan kelas B. Oleh sebab itu dihasilkan torsi start yang lebih
tinggi pada arus start yang rendah, namun bekerja pada efisisensi dan slip
yang rendah dibandingkan kelas A dan B.
4. Kelas D : Tosi start tinggi, slip tinggi
Kelas ini biasanya memiliki resistansi rotor sangkar tunggal yang tinggi
sehingga dihasilkan torsi start yang tinggi pada arus start yang rendah
Sebagai tambahan pada keempat kelas tersebut diatas, NEMA juga
memperkenalkan disain kelas E dan F, yang sering disebut motor induksi
soft- start, namun disain kelas ini sekarang sudah ditinggalkan.
Kurva torsi – kecepatan untuk berbagai disain motor induksi digambarkan
Gambar 4.2. Kurva torsi – kecepatan untuk berbagai disain motor induksi
IV.1.2 Pengujian Beban Nol ( No load test )
Pengujian beban nol, kedua kumparan utama dan kumparan bantu digunakan
pada saat menjalankan motor, tetapi saat kondisi motor sudah berputar, kumparan
bantu motor dilepas dari suplai. Sehingga data diambil ketika hanya kumparan utama
saja yang beroperasi. Pada motor induksi tiga fasa yang bekerja pada beban nol,
sehingga dapat diabaikan. Kenyataannya, kita anggap titik cabang rangkaian rotor
sebagai rangkaian terbuka karena slip yang sangat kecil. Dalam motor induksi satu
fasa, slip beban nol tidak kecil seperti pada motor tiga fasa, tetapi jika kita anggap
rangkaian rotor sebagai suatu rangkaian terbuka untuk percabangan arah maju
dibawah kondisi beban nol, kesalahan yang dihasilkan dalam perhitungan parameter
rangkaian motor akan menjadi lebih besar sedikit dibanding dengan pada motor
induksi tiga fasa. Dan dengan rangkaian pendekatan, rangkaian akan menjadi lebih
sederhana sehingga dapat digambarkan rangkaian ekivalennya seperti pada Gambar
4.3 berikut ini :
Inl R1 X1
0,5 X2
0,25 R2
Vnl
Xm
Gambar 4.3. Pendekatan Rangkaian Ekivalen pada Beban Nol Dengan s≅0
Diketahui V , nL I , dan nL P adalah harga – harga yang diukur dari tegangan nL
kerja, arus, dan daya yang dipakai motor pada kondisi beban nol. Impedansi beban
nol dapat dihitung sebagai berikut :
nL nL nL
I V
Z = ... (4.8)
nL nL nL
I P
R = 2 ….……… (4.9)
Kemudian reaktansi beban nol adalah :
nL nL
nL Z R
X = 2 − 2
……….(4.10)
Karena XnL = X1+0.5Xm+0.5X2
Maka :
2 1
2
2X X X
Xm = nL − − ……… (4.11)
IV.2. Peralatan yang digunakan
1. Motor kapasitor run
- Tegangan nominal : 220 volt
- Arus nominal : 6,3 ampere
- Frekuensi : 50 Hz
- Daya output : 0,75 kw
- cos φ : 0,85
- Putaran nominal : 1370 rpm
- Jenis rotor : sangkar
- Jumlah kutub : 4 kutub
- Kelas motor : B
- Nilai kapasitor : 25 mikrofarad
3. 1 voltmeter AC
4. 1 amperemeter AC
5. 1 wattmeter satu phasa
6. 1 unit tachometer
7. 1 unit phony brake PB 184
IV.3. Pegujian Rotor Tertahan (Blocked Rotor)
a. Rangkaian Pengujian
Rotor AC
A
u
to
T
ra
n
s
fo
rm
e
r
W
Kumparan Bantu A
V +
-+
-Vbr
Gambar 4.4. Pengujian Rotor Tertahan
b. Prosedur Pengujian
1) Susun dan rangkailah peralatan pengujian sesuai dengan gambar 4.4
di atas.
2) Tutuplah sakelar auto transformer, kemudian naikkanlah tegangan
auto transformer perlahan-lahan hingga Amperemeter menunjukkan
nilai nominal arus motor.
4) Catatlah penunjukkan Voltmeter V, dan Wattmeter W setiap
tahapannya.
5) Ulangi pengujian secara berulang-ulang dengan cara yang sama untuk
mendapatkan ketelitian pengukuran.
6) Selesai
c. Hasil pengujian
Vbr = 90 Volt
Ibr = 6,3 Amp
Pbr = 390 Watt
f = 50 Hz
d. Analisa hasil Pengujian
Impedansi rotor tertahan :
br
Resistansi rotor tertahan :
2
Reaktansi rotor tertahan :
IV.4. Pengujian Pengukuran Tahanan Belitan
Pengujian ini untuk menentukan nilai tahanan belitan bantu dan utama.
IV.4.1. Pengujian Pengukuran Tahanan Belitan Utama
a. Rangkaian Pengujian
P
T
D
C
A
V
Gambar 4.5 Rangkaian Pengujian Tahanan Belitan Utama
b. Prosedur pengujian
1. Susun dan rangkailah peralatan sesuai dengan gambar 4.5 di atas
2. Buka hubungan terminal kumparan bantu.
3. Naikkan tegangan sampai mencapai arus nominal motor
4. Catatlah nilai penunjukan dari amperemeter dan voltmeter
c. Hasil pengujian
Vdcm (Volt) Idcm (A)
d. Analisa hasil pengujian
Rdc =
( )
(
Ampere)
I
Volt V
dcm dcm
=
) (
8 , 4
) ( 26
Ampere volt
= 5,41 ohm
Karena belitan ini beroperasi pada tegangan bolak – balik maka tahanan ini
harus dikali dengan factor koreksi 1,3.
R1 = Rdc x factor koreksi
= 5,41 x 1,3
= 7,03 ohm
Dengan menggunakan persamaan ( 4.4 ) di dapat :
Rbr = R1 + R2
R2 = Rbr – R1
= 9,82 – 7,03 = 2,79 ohm
Karena motor induksi yang digunakan mempunyai design kelas B , maka :
X1 = 0,4 Xbr
= 0,4 . 10,36 = 4,14 ohm
X2 = 0,6 Xbr
= 0,6 . 10,36 = 6,21 ohm
dimana :
R2 adalah tahanan belitan kumparan rotor
X2 adalah reaktansi belitan rotor
IV.4.2. Pengujian Pengukuran Tahanan Belitan Bantu
a. Rangkaian Pengujian
P
T
D
C
A
V
Gambar 4.6 Rangkaian Pengujian Tahanan Belitan Bantu
b. Prosedur pengujian
a. Susun dan rangkailah peralatan sesuai dengan gambar 4.6 di atas
b. Buka hubungan terminal kumparan Utama.
c. Naikkan tegangan sampai mencapai arus nominal motor
d. Catatlah nilai penunjukan dari amperemeter dan voltmeter
c. Hasil pengukuran
Vdcm (Volt) Idcm (A)
38,1 4,77
r1a = 1.3
( )
IV.5. Pengujian Beban Nol
a. Rangkaian Pengujian
b. Prosedur Pengujian
a. Susun dan rangkailah peralatan pengujian sesuai dengan gambar 4.7
di atas.
b. Tutuplah sakelar auto transformer, kemudian naikkanlah tegangan
auto transformer perlahan-lahan hingga Voltmeter V menunjukkan
nilai tegangan nominal motor.
c. Catatlah penunjukkan Amperemeter A dan Wattmeter W pada saat
tersebut
d. Ulangi pengujian secara berulang-ulang dengan cara yang sama untuk
mendapatkan ketelitian pengukuran.
e. Selesai.
c. Hasil Pengujian
Vnl = 215 Volt
Inl = 3,65 Amp
Pnl = 320 Watt
d. Analisa Hasil Pengujian
Dari hasil pengujian di atas dapat ditentukan :
Impedansi beban nol :
nl nl nl
I V Z = =
65 , 3
215
= 58,9 ohm
2
Dengan menggunakan persamaan (3.17) didapat reaktansi permagnetan
motor induksi :
2
IV.6 Pengujian Berbeban
a. Rangkaian Pengujian
P
b. Prosedur Percobaan
1) Susun dan rangkailah peralatan pengujian sesuai dengan gambar 4.8
di atas.
2) Semuanya switch terbuka, pengatur tegangan semuanya minimum.
3) Tutup S, lalu naikkan PTAC sampai dicapai putaran nominal motor.
4) Naikkan beban secara bertahap, dan tetap pertahankan agar tegangan
di V
Konstan. Catatlah penunjukkan alat ukur A, W, T, dan kecepatan
motor (nr) setiap tahapnya.
5) Percobaan dilakukan sampai arus motor tidak melebihi arus nominal
untuk tegangan konstan.
6) Selesai.
c. Hasil Pengujian
Torsi ( N.m) Nr (rpm) Arus Masukan (A) Daya Input (Watt)
1,0 1410 5,22 400
1,2 1400 5,24 410
1,4 1400 5,31 440
1,6 1390 5,63 520
IV.7. Perhitungan Performansi Motor induksi Satu Phasa
- Kecepatan sinkron
ns = 1500
Nilai perbandingan belitan : a = 1,3
Xc =
- Impedansi Medan Maju (Zf)
Z12 = -j 1,3 [(12,87 + j 7,11) – (0,63 + j 2,91)]
Maka nilai I1 dan I2 berdasarkan persamaan 3.27 dan 3.28 :
Maka nilai arus beban IL :
IL = I1+I2 = (6,04 – j3,33) + (1,5+j1,25)
IL = 7,54- j2,08= 7,82∠−15,42
-Rugi-rugi tembaga rotor medan maju (Pgf)
Pgf = 1 2 21
2 2 2 2
1 ) 2 sin
(I +a I Rf + aI I Rf θ
=(6,92+1,32.1,962) . 12,87 + 2.1,3.6,9.1,96.12,87 sin (39,73-(-28,9))
= (54,3) 12,87 + 452,54 . 0,931
= 698,84 + 421,42
Pgf = 1120,26 watt
-Rugi-rugi tembaga rotor medan mundur (Pgb)
Pgb = (I12 +a2I22)Rb −2aI1I2Rbsinθ21
= (6,92+1,32.1,962) . 0,63 - 2.1,3.6,9.1,96.0,63 sin (39,73-(-28,9))
= 54,3 . 0,63 – 22,15. 0,931
= 34,20 – 20,62
-Daya bersih yang melalui celah udara adalah :
gb gf
g P P
P = −
Pg = 1120,26 – 13,58 = 1106,68 watt
- Kecepatan Mekanis
ωs = (2πns/60)= 157 rps
- Torsi medan maju
Tf =
s
ω
1
Pgf = 1120,26 7,13
157 1
= N.m
- Torsi medan mundur
Tb =
s
ω 1
Pgb = 13,58 0,086 157
1
= N.m
- Torsi resultan
T = Tf - Tb = 7,13 – 0,086 = 7,04 N.m
- Daya yang diubah ke bentuk mekanis
Pm = (1 – s) ωs T
Pm = (1 – s) ( Pgf – Pgb)
= (1-0,086)(1120,26-13,58)
= 1011,50 Watt
- Rugi – rugi perputaran Prot = Pnl – I2nl (R1 + 0,25R2)
= 320 – 3,652 (7,03+0,25.2,79)
- Daya keluaran dari motor adalah:
Pout = Pm – Prot = 1011,50 – 217,15 = 794,35 watt
- Daya masukan stator adalah :
Pinput = V1. I. cos φ = 200.7,82 cos ∠−15,42 = 1507,70 watt
Berikut tabel perofrmansi motor pada putaran nominal motor 1370 rpm :
Kecepatan sinkron (Ns) 1500 Rpm
Slip (S) 0,086
Arus Beban (IL) 7,82
Ampere
Rugi-rugi tembaga rotor medan maju (Pgf) 1120,26
watt Rugi-rugi tembaga rotor medan mundur
(Pgb) 13,58 watt
Daya bersih yang melalui celah udara (Pg) 1106,68
Watt
Kecepatan Mekanis (ws) 157 rps
Torsi medan maju (Tf) 7,13 N.m
Torsi medan mundur ( Tb) 0,086 N.m
Torsi resultan (T) 7,04 N.m
Daya yang diubah ke bentuk mekanis (Pm) 1011,50
Watt
Rugi – rugi perputaran (Prot) 217,15
Watt
Daya keluaran dari motor (Pout) 794,35
watt
Daya masukan stator (Pinput) 1507,70
watt
Efisiensi (h) 52,68%
Ada pun hasil performansi motor pada berbagai keadaan beban dan putaran
motor adalah sebagai berikut:
Beban 1,0 N.m Nr= 1410 rpm
Beban 1,2 N.m dan 1,4 N.m
Nr= 1400
Beban 1,6 N.m dan 1,8
N.m Nr= 1390
Kecepatan sinkron (Ns) 1500 rpm 1500 rpm 1500 rpm
Slip (S) 0,06 0,066 0,073
Arus Beban (IL) 6,45 A 6,81 A 7,19 A
Rugi-rugi tembaga rotor medan maju
(Pgf) 1024,75 W 1037,86 W 1068,05 W
Rugi-rugi tembaga rotor medan mundur
(Pgb) 5,38 W 6,15 W 8,45 W
Daya bersih yang melalui celah udara
(Pg) 1019,37 W 1031,71 W 1059,6 W
Kecepatan Mekanis (ws) 157 rps 157 rps 157 rps
Torsi medan maju (Tf) 6,52 N.m 6,61 N.m 6,8 N.m
Torsi medan mundur ( Tb) 0,034 N.m 0,039 N.m 0,053 N.m
Torsi resultan (T) 6,48 N.m 6,571 N.m 6,747 N.m
Daya yang diubah ke bentuk mekanis
(Pm) 958,20 W 963,61 W 982,24 W
Rugi – rugi perputaran (Prot) 217,15 W 217,15 W 217,15 W
Daya keluaran dari motor (Pout) 741,05 W 746,46 W 765,09 W
Daya masukan stator (Pinput) 1271,82 W 1336,24 W 1401,98 W
Efisiensi (h) 58,26% 55,86% 54,57%