KIPAS PENGIKUT MANUSIA BERDASARKAN WAJAH
TUGAS AKHIR
Oleh :
WAHYUDI PRASATIA
NIM : 4211401021
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
POLITEKNIK NEGERI BATAM
iii
KIPAS PENGIKUT MANUSIA BERDASARKAN WAJAH
Nama : Wahyudi Prasatia
NIM : 4211401021
Pembimbing : Kamarudin, S.T, M.T.
Email : [email protected]
ABSTRAK
Kemajuan teknologi membuat kebutuhan untuk terhadap sistem yang otomatis meningkat, salah satunya membuat kipas dapat tracking manusia secara otomatis. Pada penelitian ini bertujuan untuk mengembangkan sebuah sistem kipas yang dapat
men-tracking manusia berdasarkan wajah dan dapat membedakan wajah dengan hambatan lain di sekitarnya, sehingga manusia tidak perlu mengatur secara manual dalam mengarahkan kipas agar mendapat tiupan angin dari kipas. Untuk mendeteksi wajah manusia digunakan kamera dari smartphone android yang telah terintegrasi dengan metoda deteksi Haar Cascade yang tersedia pada libraryOpenCV. Sedangkan untuk melakukan tracking maka digunakan pengendali PID dengan dengan metode tuning Zigler Nichols yang terintegrasi dengan motor DC. Berdasarkan hasil percobaan sistem dapat melakukan tracking terhadap wajah manusia dengan rata-rata error sebesar 4.14%, sementara pengujian terhadap deteksi wajah mempunyai tingkat keberhasilan 100% dalam keadaan wajah frontal. Sementara sistem dapat men-tracking manusia berdasarkan wajah dengan keberhasilan 95%. Adapun kesalahan diakibatkan oleh sistem mekanik gearbox motor dc dan posisi hardware kamera yang tidak lurus terhadap objek wajah.
iv
FAN HUMAN TRACKING BASED ON FACE
Nama : Wahyudi Prasatia
NIM : 4211401021
Pembimbing : Kamarudin S.T, M.T.
Email : [email protected]
ABSTRACT
Technological advances make the need for an automated system increases, one of which makes the fan can track the human automatically. In this study to develop a fan system that can track human based on the face and can distinguish the face with other obstacles around it, so that humans do not need to manually set in directing the fan to get the wind from the fan. To detect human faces used cameras from android smartphones that have been integrated with the Haar Cascade detection method available in the OpenCV library. While to do tracking then used PID controller with Zigler Nichols tuning method which integrated with DC motor. Based on the results of experiments the system can track the human face with an average error of 4.14%, while testing on face detection has a 100% success rate in the face of the frontal. While the system can track human based on the face with 95% success. The error is caused by the mechanical system of dc motor gearbox and camera hardware position that is not straight to the face object.
v
KATA PENGANTAR
Bismillah, atas berkat Rahmat Allah ‘Azza wa Jalla, dan Segala Puji bagi Allah yang telah memberikan kekuatan dalam membuat Tugas Akhir ini, karena tidak ada daya, upaya, kekuatan, dan ilmu yang kita miliki melainkan semuanya dari Allah, terkadang kita lupa dengan nikmat Allah, sehingga kita merasa karena dengan kecerdasan kitalah Tugas Akhir ini dapat selesai, sesungguhnya apapun yang kita kerjakan dan miliki sejatinya berasal dari Allah. Ya Allah, berikanlah shalawatmu kepada Nabi Muhammad shallallahu ‘alaihi wa
sallam berserta keluarga beliau, kerana melalui beliaulah kami mengenal-Mu dan kami memiliki suri tauladan yang baik.
Tugas akhir ini ditujukan guna untuk memenuhi salah satu persyaratan memperoleh gelar Sarjana Sains Terapan (S.Tr) pada program studi Teknik Mekatronika di Politeknik Negeri Batam.
Dalam penulisan tugas akhir ini terdapat masih bayak kekurangan baik dari segi motode penulisan maupun pemaparan materi. Oleh karena itu perlunya penulis mendapat kritik berserta saran yang membangun agar dapat memperbaiki kesalahan-kesalahan untuk masa yang akan datang.
Dalam penulisan Tugas Akhir ini dengan segala kerendahan hati, penulis yang hanya berstatus anak dari bapak SYAFRIL dan ibu GUSTIAWATI mengucapkan Jazakumullah Khairan, kerana berkat doa dan dukungan kalianlah ini dapat terselesaikan. Dan selanjutnya
Jazakallah Khairan kepada bapak KAMARUDIN S.T, M.T,. selaku pembimbing yang telah bersedia meluangkan waktu, tenaga dan pikirannya untuk membimbing penulis dalam meyelesaikan tugas akhir ini. Adapun selanjutnya penulis ucapkan Jazakumullah Khairan
kepada :
a. Bapak Dr. Priyono Eko Sanyoto, Selaku Direktur Politeknik Negeri Batam. b. Bapak Dr. Budi Sugandi, S.T., M.Eng. Selaku Ka. Jurusan Teknik Elektro
Politeknik Negeri Batam.
c. Baak Heru Wijanarko, S.T., M.T Selaku Ka. Prodi Teknik Mekatronika Politeknik Negeri Batam.
d. Kepada seluruh kerabat, kaum muslimin dan kaum muslimat yang telah membantu dan mendukung selama kuliah.
e. Kepada seluruh teman-teman angkatan 2014, khususnya Boeng, AW, Pak Mar, Surya, Piantok, Zainuddin.
vi
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... i
LEMBAR PENGESAHAN ... ii ABSTRAK ... iii ABSTRACT ... iv KATA PENGANTAR ... v DAFTAR ISI ... vi DAFTAR GAMBAR ... ix DAFTAR TABEL ... x BAB 1 PENDAHULUAN ... 1
1.1. Latar Belakang Masalah ... 2
1.2. Perumusan Masalah ... 2
1.3. Batasan Masalah... 2
1.4. Tujuan Dan Manfaat Penelitian ... 2
1.5. Sistematika Penulisan ... 2
BAB 2 DASAR TEORI ... 4
2.1. Sistem Pendeteksi Wajah ... 4
2.1.1. Citra Digital ... 4
2.1.2. Citra Grayscale ... 4
2.1.3. Integral Image ... 4
2.1.4. Haar Feature pada OpenCV Library ... 5
2.2. Motor DC ... 5
2.3. Rotary Encoder ... 6
2.4. Kendali PID ... 7
2.4.1. Konsep Dasar PID ... 7
2.4.2. Tuning Parameter PID ... 8
BAB 3 PERANCANGAN SISTEM ... 9
3.1. Strategi Penelitian ... 9
3.2. Perancangan Perangkat Keras ... 10
3.2.1. Spesifikasi Mekanik ... 10
3.2.2. Blok Diagram Kelistrikan ... 11
3.3. Perancangan Perangkat Lunak ... 13
vii
3.3.2. Perancangan Aplikasi Pendeteksi Wajah ... 13
3.3.3. Diagram Sistem Komunikasi ... 15
3.3.4. Diagram Sistem Kendali ... 16
3.4. Instrument Penelitian ... 16
3.4.1. Alat yang Digunakan ... 16
3.4.2. Lingkungan Tempat Pengujian ... 16
3.4.3. Tujuan Penelitian ... 16
BAB 4 HASIL DAN ANALISA ... 17
4.1. Hasil Pengujian Sistem Pendeteksi Wajah ... 17
4.1.1. Sistem Pendeteksian Wajah ... 17
4.1.2. Hasil Pengujian Pendeteksi Wajah ... 23
4.2. Hasil Pengujian Sistem Pengendali Arah Kipas ... 28
4.2.1. Sistem Pengendalian Arah Kipas dengan Metoda Zigler Nichols ... 28
4.2.2. Hasil Pengujian Pengendalian Arah Kipas ... 29
4.3. Hasil Pengujian Tracking Arah Kipas Berdasarkan Wajah ... 30
4.4. Analisa Hasil Pengujian Sistem ... 31
4.4.1. Analisa Sistem Pendeteksi Wajah ... 31
4.4.2. Analisa Sistem Pengendalian Arah Kipas ... 31
4.4.3. Analisa Hasil Tracking Arah Kipas Berdasarkan Wajah ... 32
BAB 5 KESIMPULAN DAN SARAN ... 33
5.1. Kesimpulan ... 33
5.2. Saran ... 33
DAFTAR PUSTAKA ... 34
LAMPIRAN A. Gambar Grafik Hasil Pengendali P Pada Konstanta Kp = 1 ... 36
LAMPIRAN B. Gambar Grafik Hasil Pengendali PID ... 37
LAMPIRAN C. Data Hasil Percobaan 1 & 2 ... 38
LAMPIRAN D. Data Hasil Percobaan 3 & 4 ... 39
LAMPIRAN E. Data Hasil Percobaan 5 & 6 ... 40
LAMPIRAN F. Data Hasil Percobaan 7 & 8 ... 41
LAMPIRAN G. Data Hasil Percobaan 9 & 10 ... 42
LAMPIRAN H. Data Hasil Percobaan 11 & 12 ... 43
LAMPIRAN I. Data Hasil Percobaan 13 & 14 ... 44
LAMPIRAN J. Data Hasil Percobaan 15 & 16 ... 45
viii LAMPIRAN L. Data Hasil Percobaan 19 & 20 ... 47 BIAGRAFI PENULIS ... 48
ix
DAFTAR GAMBAR
Gambar 2.1 Haar-like Feature ... 5
Gambar 2.2 Haar Feature Pada Citra Wajah ... 5
Gambar 2.3 Rangkaian Elektrik Dan Model Mekanik DC Motor ... 6
Gambar 2.4 Ilustrasi Output Rotary Encoder ... 6
Gambar 2.5 Diagram Blok PID ... 7
Gambar 2.6 Nilai Pcr ... 8
Gambar 3.1 Strategi Penelitian ... 9
Gambar 3.2 Desain Mekanik ... 10
Gambar 3.3 Dimensi Mekanik... 10
Gambar 3.4 Diagram Kelistrikan... 11
Gambar 3.5 Diagram Alur ... 13
Gambar 3.6 Daftar Perangkat Bluetooth... 14
Gambar 3.7 Layout Kamera ... 14
Gambar 3.8 Cara Berkomukasi ... 15
Gambar 3.9 Diagram Kendali ... 16
Gambar 4.1 Hasil Pembacaan Citra ... 17
Gambar 4.2 Script onCameraFrame ... 17
Gambar 4.3 RGBtoGray ... 18
Gambar 4.5 Hasil Ukuran Sub Window ... 18
Gambar 4.6 Implementasi Haar Feature ... 20
Gambar 4.7 Fitur Haar Selanjutnya ... 20
Gambar 4.8 Scirpt Sistem Deteksi Wajah ... 21
Gambar 4.10 Jarak Minimal (±15 cm) ... 22
Gambar 4.11 Jarak Maksimal (±330 cm) ... 22
Gambar 4.12 Deteksi Sudut Kemiringan Wajah 0º (Frontal) ... 23
Gambar 4.13 Sudut Kemiringan Wajah ... 24
Gambar 4.14 Kontur Wajah Tidak Ditemukan ... 25
Gambar 4.15 Terdapat Kontur Wajah ... 25
x
DAFTAR TABEL
Tabel 2.1 Zigler Nichols Tabel ... 8
Tabel 3.1 Komponen Kelistrikan... 11
Tabel 4.1 Ukuran Pixel Sub Scan Window ... 19
Tabel 4.2 Spesifikasi Pengujian ... 22
Tabel 4.3 Tingkat Kecerahan... 26
Tabel 4.4 Tabel Hasil Pengujian Sistem Pendeteksi Wajah ... 27
Tabel 4.5 Nilai Kcr&Pcr ... 29
Tabel 4.6 Respon Sistem Pengendali Arah Kipas dengan Metoda Zigler Nichols .... 29
1
BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah
Teknologi yang semakin dinamis menuntut manusia untuk lebih inovatif. Banyaknya cara dalam memecahkan masalah teknologi pada masyarakat, membuat sistem yang ada juga semakin membaik. Hal ini dapat membantu manusia berkerja lebih praktis, termasuk dalam memanjakan kehidupan manusia. Dalam hal ini peneliti akan membahas tentang bagaimana kipas dapat autotracking terhadap manusia.
Sekarang ini telah banyak cara dan metode yang muncul untuk membuat kipas
tracking manusia secara otomatis. Pada umumnya kipas angin, untuk mendapatkan jangkauan angin yang luas, kita butuh mengatur kipas ke mode swing, lalu seseorang terpakasa harus mengarahkan kipas ke arahnnya secara manual, untuk mendapatkan angin yang diinginkan, tentu ini tidak praktis.
Tajrin Ishrat, dkk (2014) dalam menyelesaikan permasalahan ini mengunakan metode sensor jarak ultrasonik untuk mendeteksi manusia. Ternyata metode yang digunakan pada penelitian tersebut terdapat beberapa keterbatasan, diantaranya sensor ultrasonik hanya dapat mendeteksi satu objek dalam satu waktu, jangkauan maksimum sensor kurang lebih tiga meter, dan sensor tidak dapat membedakan antara manusia dengan hambatan lainnya[1].
Berdasarkan pengamatan peneliti, untuk mengatasi kekurangan tersebut maka peneliti mengajukan sebuah metode, dimana sensor yang akan digunakan pada metode ini adalah kamera, karena pengolahan citra pada kamera telah mencapai tingkat intelejensi yang sangat cerdas dan dinamis, dibandingkan penggunaan sensor ultrasonik pada penelitian sebelumnya.
1.2. Perumusan Masalah
a. Bagaimana metode ini dapat membedakan manusia dan hambatan lain berdasarkan wajah ?
2
1.3. Batasan Masalah
a. Kipas hanya dapat berotasi dengan rentang 120 derajat. b. Kipas hanya dapat men-tracking satu objek wajah. c. Kamera tidak dapat mendeteksi di area gelap.
d. Sistem tidak akan bekerja jika obyek berada di luar jangkauan kamera.
1.4. Tujuan Dan Manfaat Penelitian
a. Tujuan dari penelitian ini adalah :
- Kipas dapat autotracking manusia bedasarkan wajah.
- Kipas dapat membedakan manusia dengan hambatan lain berdasarkan wajah.
b. Manfaat dari penelitian ini adalah :
- Dapat mempermudah manusia dalam aktifitas.
- Dengan ini manusia tidak perlu lagi mengatur secara manual kipas mereka. - Interaksi antara kipas dan manusia terlihat lebih praktis.
1.5. Sistematika Penulisan
Sistematika penulisan pada penelitian ini adalah sebagai berikut : BAB 1 : Pendahuluan
Pada umumnya kipas angin harus di atur secara menual, agar angin kipas ke arah manusia. Penelitian sebelumnya membahas bagaimana kipas dapat autotracking manusia, namun memiliki beberapa kekurangan.
BAB 2 : Dasar Teori
Kamera pada kipas digunakan untuk mendeteksi wajah manusia dengan algoritma haar cascade classifier, setelah obyek terditeksi maka sistem pengendali yang diintegrasi dengan motor DC akan melakukan
autotracking. BAB 3 : Perancangan Sistem
Sistem akan di rancang dalam beberapa tahap penelitian, diantaranya pengujian sensor, perancangan hardware, pembuatan program, pengimplementasian hadware dangan program, dan pengujian.
3 BAB 4 : Hasil dan Analisa
Pada bab ini akan di tampilkan hasil berserta data yang dihasilkan dalam melakukan penelitian, kemudian dipaparkan dengan analisa berserta penjelasan berdasarkan hasil yang didapat dalam melakukan penelitian. BAB 5 : Kesimpulan dan Saran
Kesimpulan dari hasil dan analisa yang dihasilkan menjadi pembahasan pada bab ini, dan terdapat saran yang dapat menjadi acuan untuk penelitian berikutnya.
4
BAB 2 DASAR TEORI
Bagian ini akan menjelaskan tentang, beberapa dasar teori yang akan menjadi landasan dalam penelitian ini. Peneliti akan memapaparkan beberapa penelitian yang berkaitan dengan sistem pendeteksi wajah, konfigurasi motor DC berserta pengendali PID, cara kerja sensor rotary encoder, berserta prosesor yang digunkan di dalam penelitian ini.
2.1. Sistem Pendeteksi Wajah 2.1.1.Citra Digital
Citra digital merupakan sebuah Gambar dari dunia nyata yang dinyatakan dalam sebuah fungsi Matrix f(x,y) dengan mengunakan bantuan komputer, sehingga dapat diolah untuk mendapat informasi yang terkandung dalam Gambar tersebut[2].
2.1.2.Citra Grayscale
Citra grayscale merupakan sebuah citra digital yang hanya memiliki satu nilai pada setiap pixel-nya, dimana nilai tersebut didapat dari intensitas citra true color. Adapun citra grayscale adalah bagian dari normalisasi RGB (true color) sehingga dapat mempercepat, mempermudah, dan efektif dalam melakukan pengolahan citra digital.[2][3].
Untuk mendapatkan citra grayscale maka digunakan rumus:
𝐺 =1
3 (𝑅 + 𝐺 + 𝐵) (2.1)
2.1.3.Integral Image
Untuk mendapatkan Haar feature pada sebuah citra maka dilakukan
Intergal Image, dimana integral image ini dibutuhkan untuk mempercepat proses pencarian feature. Nilai pada matrix pixel citra grayscale dengan f(x,y) dilakukan integral image degan rumus[4][5]:
5
2.1.4.Haar Feature Pada OpenCv Libaray
Deteksi wajah mengunakan kamera membutuhkan sebuah metode, dalam peneitian ini metode yang akan digunakan yaitu Haar Cascade Classifier yang telah tersedia pada OpenCV library, pada penelitian ini OpenCV library akan dijalankan di atas platform android. OpenCV merupakan library terbuka untuk komputer vision. OpenCV dirancang untuk menyederhanakan komputasi yang berguna pada aplikasi realtime yang memiliki 500 lebih fungsi yang dapat digunakan dalam mempercepat proses pengolahan citra [6]. Pada awalnya penelitian tentang Haar Cascade Classifier dilakukan oleh Viola ddk (2001)[7]. Sebuah citra wajah dibagi atas beberapa fitur yang disebut dengan Haar feature
seperti Gambar 2.1.
Gambar 2.1 Haar-like Feature[6].
Haar feature ini akan dilakuakan penghitungan dengan citra wajah seperti Gambar 2.2.
Gambar 2.2 Haar Feature Pada Citra Wajah[7].
Haar feature pada citra wajah digunakan untuk menghitung perbedaan intensitas warna yang ada pada area-area wajah, untuk mencari nilai threshold dilakukan dengan mengurangkan area putih dengan area hitam[4][5][6][7].
∆ = 1 𝑛 ∑ 𝐼(𝑥) 𝑛 ℎ𝑖𝑡𝑎𝑚 − 1 𝑛 ∑ 𝐼(𝑥) 𝑛 𝑝𝑢𝑡𝑖ℎ (2.3) 2.2. Motor DC
Motor adalah mesin yang membutuhkan arus searah, merubah kumparan medan menjadi gerak mekanik, motor DC sangat flexible karena mudah menyesuaikannya
6 dengan berbagai pengendali kecepatan dan posisi[8][9][10][11][12][13]. Adapun rangkaian elektrik dan model mekanik dari DC motor seperti Gambar 2.3.
Gambar 2.3 Rangkaian Elektrik Dan Model Mekanik DC Motor[14]. Penjelasan,
R = armature resistance
L = armature inductance
J = moment of inertia
Kt = motor torque constant
Ke = back emf constant
B = viscous friction
Tm = motor torque
Untuk itu maka didapatkan persamaan matematika :
𝐽𝑑𝜔(𝑡) 𝑑𝑡 + 𝐵𝜔(𝑡) = 𝑇𝑚(𝑡) (2.4) 𝐿𝑑𝑖𝑎(𝑡) 𝑑𝑡 + 𝑅𝑖𝑎(𝑡) = 𝑣𝑎(𝑡) − 𝑣𝑏(𝑡) (2.5) 𝑣𝑏 = 𝐾𝑒𝜔(𝑡) (2.6) 𝑇𝑚(𝑡) = 𝐾𝑡𝑖𝑎(𝑡) (2.7)
Pada penelitian ini Motor DC akan dikendalikan dengan batuan feedback sensor agar dapat diatur sudut dan posisinya, yang digunakan dalam mengatur arah kipas.
2.3. Rotary Encoder
Rotary Encoder akan digunakan untuk mendeteksi posisi dari obyek yang diberi rentang 120 derajat pada penelitian ini. Rotary Encoder adalah perangkat yang digunakan untuk mengkonversi pergerakan putaran menjadi pulsa digital.
7
Rotary Encoder diputar searah jarum jam maka Output sama dengan phase A pada Gambar 2.4, sedangkan jika diputar berlawanan arah jarum jam maka pulsa yang keluar phase B, dimana nilai pulsa cepat 90 derjat dari fasa A[15]. Dengan menggunakan bantuan microcontroller pulsa yang dikeluarkan oleh encoder dapat diolah menjadi data Count.
2.4. Kendali PID (Propotional Integral Derivative) 2.4.1.Konsep Dasar PID
Kendali PID banyak digunakan untuk sistem dinamik, dengan PID kontrol sistem dinamik yang awalnya tak terkendali dapat dikendalikan, diperlukan kestabilan dalam menggunakan kendali PID mebuat sistem sesuai dengan yang diinginkan, dengan adanya kendali Propotional dan Derivative telah mampu menigkatkan kinerja sistem mengatasi error steady state atau menjaga kestabilan sistem dinamik[15][16][17].
Rancangan kendali PID dapat digambarkan dalam bentuk diagram blok pada Gambar 2.5
Gambar 2.5 Diagram Blok PID
Sinyal kontrol yang digunakan dalam proses PID didapat dari error, adanya konstanta Kp, Ki, Kd, merupan tuning parameter dari PID untuk mengendalikan plan atau proses. PID dapat disusun dalam persamaan berikut :
𝑢(𝑡) = 𝐾𝑝𝑒(𝑡) + 𝐾𝑖∫ 𝑒(𝑡)𝑑𝑡0𝑡 + 𝐾𝑑𝑑𝑒(𝑡)
𝑑𝑡 (2.8)
Persamaan PID ini akan diimplementasikan menjadi sebuah algoritma yang dapat diterapakan di dalam micrcontroller sehingga mampu mengontrol posisi motor DC. Nilai pada sensor rotary encoder menjadi referensi pengendali PID untuk mengetahui feedback error dari sistem.
8
2.4.2.Tuning Parameter PID
Nilai konstanta pengendali PID tidak terdapat lansung begitu saja oleh karena itu diperlukan Tuning, dengan ini membuat sistem menjadi dapat terkendali dengan baik. Pada penelitian ini peneliti menggunkan metode Tuning Zigler Nichols agar lebih cepat dalam menentukan nilai konstanta. Berikut langkah-langkah menggunakan tuning Zigler Nichols[19][20][21][22] :
a) Terapkan PID dengan hanya menggunakan konstanta Kp.
b) Setting Kp dengan menaikan nilainya, sehingga respon berosilasi yang berkesinambungan.
c) Setelah mencapai osilasi yang berkesinambungan, maka didapat nilai Kcr (Gain Critical) = Kp.
d) Nilai Pcr didapat dari ilustrasi seperti pada Gambar 2.6
Gambar 2.6 Nilai Pcr[22].
e) Setelah nilai Kcr dan Pcr didapat, untuk menemukan nilai Kp, Ki Kp maka dapat digunakan ketentuan Zigler Nichols pada Tabel 2.1
Tabel 2.1 Zigler Nichols Tabel
Tipe Kontroller Kp Ti Td
P 0.5 Kcr ∞ 0
PI 0.45 Kcr 0.83333 Pcr 0
9
BAB 3
PERANCANGAN SISTEM
Sistem dalam penelitian ini akan dirancang dalam beberapa tahap penelitian. Diantaranya strategi penelitian, perancangan mekanik, perancangan electrical, perancangan pemograman, dan instrument yang digunakan.
3.1. Strategi Penelitian
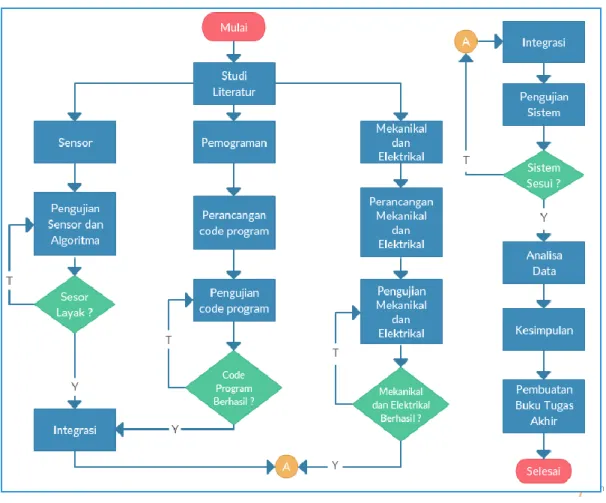
Srategi penelitian merupakan langkah-langkah dalam melaksanakan penelitian ini, Gambar 3.1 terdapat alur strategi penelitian yang akan dilakukan.
Gambar 3.1 Strategi Penelitian
Peneliti akan memulai penelitian dari mempelajari literatur tentang sensor, mekanik, Elektrikal, dan pemograman. Setelah melakukan studi literatur maka akan dilakuakan perancangan sistem. Sistem yang telah dirancang dilakuan pengujian, untuk mengetahui sistem dapat berjalan sesuai fungsinya. Sistem dapat berkerja sesuai dengan tujuan penelitian akan dilakukan analisa data lalu ditarik kesimpulan. Pembuatan buku tugas akhir akan menjadi publikasi dari hasil penelitian.
10
3.2. Perancangan Perangkat Keras 3.2.1.Spesifikasi Mekanik
Perancanganmekanik dapat dilihat berdasarkan desain pada Gambar 3.2 berserta ukuran mekanik pada Gambar 3.3.
Gambar 3.2 Desain Mekanik
11 Pada Gambar 3.3 mekanik berbentuk kotak yang berwarna putih merupakan kerangka bawah mekanik yang digunakan sebagai tempat komponen
electrical dan landasan putar dari piringan, ini terbuat dari bahan akrilik. Piringan yang berwarna hitam pada Gambar dapat berputar dengan bantuan motor dc di bawahnya dan dibantu roda bebas. Ukuran mekanik secara keseluruhan dengan memiliki ketinggian ±67 cm dan lebar ±30 cm.
3.2.2.Blok Diagram Kelistrikan
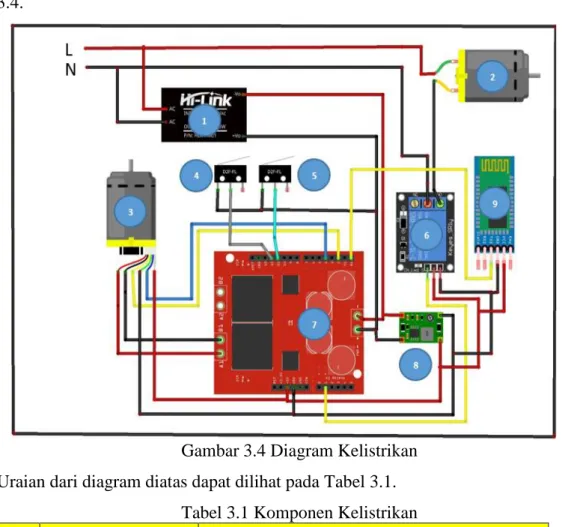
Pada blok diagram kelistrikan ini akan menjelaskan tentang komponen-komponen yang akan digunakan, untuk lebih jelas dapat dilihat pada Gambar 3.4.
Gambar 3.4 Diagram Kelistrikan Uraian dari diagram diatas dapat dilihat pada Tabel 3.1.
Tabel 3.1 Komponen Kelistrikan
No. Nama Komponen Keterangan
1 Power Suplay Power Suplay memiliki tegangan input AC 220V ke 12 VDC, yang digunakan untuk mensuplay tegangan ke Driver Motor, dan menjadi inputan Buck Converter.
12 2 Motor AC (Kipas) Motor Ac kipas membutuhkan tegangan input
AC 220V lalu dikontrol oleh Relay.
3 Motor DC dengan
Encoder
Motor Dc membutuhkan tegangan input 12 VDC yang dikontrol melalui Driver Motor.
Encoder membutuhkan tegangan input 5 VDC yang didapat dari Output Buck Converter, memliki pin signal A, dan B. Signal A terkoneksi ke pin 2 Arduino dan Signal B ke pin 4 Arduino.
4 Limit Switch 1 Limit Switch 1 pada pin COM terkoneksi dengan ground(GND), dan pin NO(Normaly Open) terkoneksi dengan pin 12 Arduino. 5 Limit Switch 2 Limit Switch 1 pada pin COM terkoneksi
dengan ground(GND), dan pin NO(Normaly Open) terkoneksi dengan pin 11 Arduino. 6 Relay Relay tekoneksi dengan Motor AC, dengan 3
pin VCC,GND, Signal. VCC membutuhkan sumber 5 VDC, dan Signal terkoneksi dengan pin A0 Arduino.
7 Arduino Uno dengan Driver
Motor
Arduino membutuhkan sumber tegangan 5 VDC yang diambil dari Buck Converter.
Driver motor membutuhkan sumber 12 VDC dan 5 VDC, yang digunakan untuk mengontrol motor AC.
8 Buck Converter Buck Converter memiliki tegangan input
12VDC ke 5 VDC, yang digunakan untuk mensuplay tegangan ke Driver Motor, dan menjadi inputan Arduino.
9 Bluetooth HC-05 Bluettoth HC-05 memiliki inputan tegangan 5VDC, dan pin TX terhubung ke pin TX
Arduino.
13
3.3. Perancangan Perangkat Lunak 3.3.1.Diagram Alur Proses
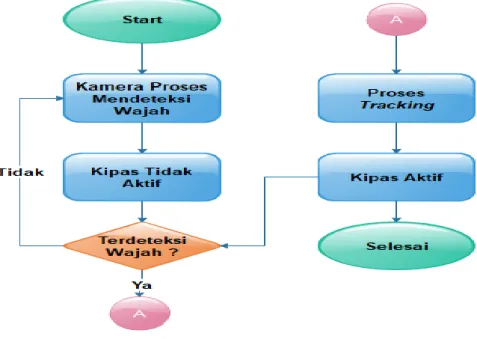
Gambar 3.5 Diagram Alur
Pada Gambar diagram 3.5, proses yang dilakukan pertama kali yang dilakukan yaitu kamera menggunakan bantuan library OpenCV melakukan proses pencarian fitur wajah, ketika objek wajah belum ditemukan maka kipas tidak diaktifkan. Setelah kamera menemukan objek wajah maka akan dilanjutkan ke proses tracking, untuk proses tracking sendiri akan dibahas dalam bab ini di poin 3.3.3 dan 3.3.4., selama proses tracking berlangsung kipas akan diaktifkan, hal ini akan berulang terus menerus sampai kamera tidak mendeteksi lagi adanya fitur wajah.
3.3.2.Perancangan Aplikasi Pendeteksi Wajah
Aplikasi pendeteksi wajah pada penelitian ini akan dibuat menggunakan
IDE Android Studio, aplikasi akan berjalan untuk perangkat android. Aplikasi atau software android ini menggunakan bantuan library OpenCv untuk melakukan proses deteksi wajah, apilikasi disusun dengan bahasa pemograman
14 Gambar 3.6 Daftar Perangkat Bluetooth
Gambar 3.7 Layout Kamera
Pada Gambar 3.6 merupakan layout yang berfungsi untuk menampung perangkat Bluetooth yang tersedia atau terkoneksi dengan perangkat android, juga terdapat tombol refresh yang berguna untuk mencari kembali perangkat yang terkoneksi, untuk penelitian ini bluetooth HC-05 akan dikoneksikan dengan perangkat android. Sedangkan pada Gambar 3.7 merupakan layout
15 ditempilakan pada layout ini, terdapat juga tombol dengan tanda silang(x) yang berfungsi untuk menghentikan proses kamera dan deteksi wajah, kemudian sistem akan kembali ke daftar perangkat bluetooth.
3.3.3.Diagram Sistem Komunikasi
Pada bagian ini merupakan cara komunikasi data yang didapat oleh Kamera
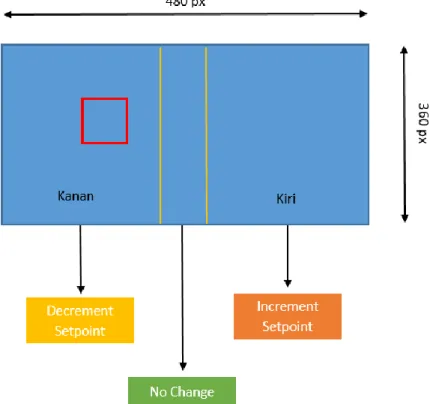
Android Smartphone dengan sistem pengendali arah kipas, yang dapat diamati pada Gambar 3.8.
Gambar 3.8. Cara Berkomukasi
Pada Gambar 3.8. mengilustrasikan sebuah frame kamera dengan ukuran 480×360 px, didalamnya terdapat kontak berwarna merah yang menandakan sebuah objek, ketika objek berada pada area sebelah kanan maka sistem akan mengirim perintah Increment Set point, sebaliknya jika objek di sebelah kanan sistem akan mengirim Increment Set point. Perintah ini akan dikirim dari Aplikasi Pendeteksi Wajah pada smartphone android ke sistem pengendali melalui media bluetooth.
16
3.3.4.Diagram Sistem Pengendali (Tracking)
Pada diagram pengendali ini adalah proses yang akan terjadi pada motor DC dengan skema pada Gambar 3.9.
Gambar 3.9 Diagram Kendali
Dari Gambar 3.9 dapat diperhatikan bahwa nilai Set point akan ditentukan setelah melewati proses komunikasi, dari nilai Set point maka akan terbentuk nilai error yang di akibatakan oleh tidak sesuainya nilai pembacaaan encoder
pada motor DC, untuk menyelesaikan kasus ini maka digunakan pengendali PID yang nantinya akan mempengaruhi Motor DC untuk berputar sehingga terjadi perubahan derajat putaran pada kipas. Sedangkan Count merupakan penjumlahan atau pengurangan sebuah nilai berdasarkan pulsa yang dihasilkan oleh encoder. Proses ini akan dilakukan dengan bantuan microcontroller Arduino Uno.
3.4. Intrument Penelitian 3.4.1.Alat yang digunakan
Alat yang digunakan untuk penelitian ini yaitu busur, meteran. Busur digunakan untuk mengukur sudut pada tracking posisi. Meteran digunakan untuk mengukur jarak jangkau angin, dan jangkauan kamera.
3.4.2.Lingkungan tempat pengujian
Lingkungan dalam penelitian ini adalah lingkungan tertutup atau didalam ruangan. Tempat untuk melakukan penelitian dan pengujian yaitu lab inovation hall di Teching Factory Politeknik Negeri Batam.
3.4.3.Tujuan Pengujian
Sistem yang telah selesai dikembangakan terdapat beberapa perubahan atau perbaikan pada penelitian, perlunya dilakukan pengujian agar perubahan atau perbaikan dari sistem sesuai dengan tujuan penelitian ini.
17
BAB 4
HASIL DAN ANALISA 4.1. Hasil Pengujian Sistem Pendeteksi Wajah
Pada bagian ini akan terdapat beberapa pemaparan data dan penjelasan, berserta analisa tentang hasil pengujian sistem deteksi wajah. Mulai dari pembacaan citra dari kamera, mengambil dan menangani frame video, pemilihan sub window, sampai dengan sistem dapat mengenali wajah, dan juga terdapat beberapa hasil pengujian terhadap citra wajah yang berhasil terdeteksi.
4.1.1. Sistem Pendeteksian Wajah a) Hasil Pembacaan Citra
Gambar 4.1 Hasil Pembacaan Citra
Langkah awal dalam sistem pengolahan citra yaitu dengan mengakusisi citra dari kamera, dengan mengubah citra analog yang ditangkap kamera menjadi citra digital dalam bentuk pixel. Dengan mengunakan library OpenCV Android SDK, untuk mengakuisisi citra maka digunakan library
org.opencv.android.CameraBridgeViewBase, yang merupakan sebuah kelas yang menghubungkan kamera android dengan library OpenCV, adapun hasilnya ditampilkan pada Gambar 4.1.
b)Hasil Pengambilan Frame dari Kamera
Gambar 4.2 Script onCameraFrame
Setelah script pada gambar 4.2 dijalankan maka Gambar 4.1 merupakan citra yang hasilkan pada kecepatan 24,03 Frame per Second (FPS), citra ini ditampilkan dengan panjang480 pixeldan lebar 360 pixel.
18
c) Hasil Perubahan Citra RGB ke Grayscale
Grayscaling merupakan proses untuk mengubah citra dari warna RGB menjadi warna abu-abu atau hitam putih. Untuk citra Gryscale maka digunakan
script seperti pada Gambar 4.3.
Gambar 4.3 RGBtoGray
Maka didapat hasil seperti yang ditampilkan pada Gambar 4.4:
(a) (b)
Gambar 4.4 Hasil Citra RGB ke Gray
Gambar 4.4a merupakan citra RGB, dengan menggunakan script pada Gambar 4.3 maka didapat hasil citra Grayscale yang ditampilkan pada Gambar 4.4b.
d)Hasil Penentuan Ukuran Sub Window
Dalam sistem pendeteksi wajah dibutuhkan penentuan sub window, didalam setiap sub window dilakukan pencarian fitur Haar.
Gambar 4.5 Hasil Ukuran Sub Window
Gambar 4.5 merupakan sub window yang dihasilkan, penentuan ukuran sub window mulai dari pixel bagian kiri atas dari citra Grayscale, dengan ukuran berdasarkan hasil perhitungan di bawah ini.
19
Ukuran 𝑠𝑢𝑏 𝑤𝑖𝑛𝑑𝑜𝑤 = tinggi × 0.05 𝑈𝑘𝑢𝑟𝑎𝑛 𝑠𝑢𝑏 𝑤𝑖𝑛𝑑𝑜𝑤 = 360 × 0.05 = 𝟏𝟖 pixel.
Sub window pertama kali akan dimulai dengan ukuran 18×18 pixel, atau disebut dengan sub window initial, lalu dilakukan proses seleksi fitur haar dan integral image sampai dengan pixel pada citra Grayscale bagian kanan bawah. Sub window dihasilkan dengan ukuran yang beragam, karena ukuran wajah yang dideteksi juga beragam. Keberagaman ukuran sub windows dihasilkan melalui perbesaran terhadap sub window initial yang dikalikan dengan faktor skala 1.1,
hasil perbesaran di tampilakan pada Tabel 4.1.
Tabel 4.1 Ukuran PixelSub Scan Window Iterasi ke- Size (px) Iterasi ke- Size (px) 1 18 17 82,70 2 19,8 18 90,98 3 21,78 19 100,07 4 23,95 20 110,08 5 26,35 21 121,09 6 28,98 22 133,20 7 31,88 23 146,52 8 35,07 24 161,17 9 38,58 25 177,29 10 42,44 26 195,02 11 46,68 27 214,52 12 51,35 28 235,97 13 56,49 29 259,57 14 62,14 30 285,53 15 68,35 31 314,08 16 75,19 32 345,49
20
e) Hasil Seleksi Feature Haar
(a) (b)
Gambar 4.6 Implementasi Haar Feature
Gambar 4.6a merupakan sub windows pada ukuran 90,98 × 90,98 pixel,
diilustrasikan citra telah direpresentasikan dengan fitur Haar lalu kemudian dilakukan Integral Image (telah dibahas pada dasar teori) untuk mendapatkan nilai
treshold, dari hasil perhitungan maka ditentukan bahwa citra pada sub windows
ini mengandung fitur Haar, sedangkan citra pada sub window yang ditampilkan pada Gambar 4.6b setelah dilakukan proses yang sama dengan sub window pada Gambar 4.6a, maka dihasilakan bahwa sub window ini tidak mengadung fitur
Haar.
f) Hasil Pemilihan Sub Window
Sub Window yang tidak terdapat fitur Haar didalamnya tidak akan diproses lagi, yang berarti sub window tersebut tidak lulus pada proses seleksi pertama seperti Gambar 4.6b. Sedangkan citra pada sub window yang memiliki fitur Haar
dinyatakan lulus pada proses seleksi pertama sehingga dapat dilanjutkan ke proses seleksi berikutnya.
(a) (b) (c)
Gambar 4.7 Fitur Haar Selanjutnya
Pada Gambar 4.7 ada beberapa fitur yang diterapkan untuk mendetesi apakah dalam sub window yang telah lulus pada proses pertama terdapat wajah atau tidak. Berdasarkan Landasan Teori, sub window yang memiliki fitur akan
21 melakukan proses seleksi dengan sebanyak 16.000 lebih fitur Haar sehingga citra pada sub windows tersebut benar-benar terdapat citra wajah.
g) Hasil Wajah yang Terditeksi
Proses seleksi fitur Haar dilakukan dengan menggunakan script yang ditampilakan pada Gambar 4.8.
Gambar 4.8 Scirpt Sistem Deteksi Wajah
(a) wajah (b) bukan wajah Gambar 4.9 Hasil Penentuan Wajah
Setelah semua seleksi fitur Haar dilakuakan maka didapatkan hasil pada Gambar 4.9a, yang mununjukkan bahwa citra pada sub window tersebut lulus proses seleksi sehingga dapat dideskripsikan sebagai wajah, sedangkan 4.9b merupakan sub window yang tidak lulus seleksi sehingga tidak dapat dideskripsikan sebagai wajah.
22
4.1.2.Hasil Pengujian Deteksi Wajah
Pengujian sistem pendeteksi wajah dilakukan dengan menggunakan spesifikasi smartphone android berdasarkan Tabel 4.2 :
Tabel 4.2 Spesifikasi Pengujian
No. Komponen Keterangan
1 Merek Xiomi 4X
2 OS (Operating Sistem) Android 7.0 (Nuget) 3 Kamera Depan ( Digunakan) 5 Mega Pixel
4. Aplikasi Camera Frame 480 × 380 pixel
Pengujian akan dilakukan dalam beberapa bagian yaitu, berdasarkan jarak jangkauan kamera, derajat kemiringan wajah, wajah terhalang objek, dan pencahayaan.
a) Pengujian Jarak Jangkauan Kamera
Gambar 4.10 Jarak Minimal (±15 cm)
23 Pada Gambar 4.11 merupakan hasil pengujian jarak jangkauan minimal kamera yaitu sejauh ±15 cm, dan Gambar 4.11 dari hasil pengujian yang didapatkan bahwa jarak jangkauan terjauh kamera atau maksimal sejauh ±330cm.
b)Pengujian Berdasarkan Derajat Kemiringan Wajah
Gambar 4.12 Deteksi Sudut Kemiringan Wajah 0º (Frontal)
Pengujian dilakukan dengan wajah dengan sudut kemiringan 0º Derajat yang ditampilkan pada Gambar 4.12, hasil yang didapatkan wajah terbaca 100% tanpa ada kesalahan di luar sisi wajah.
24 (b)
(c)
Gambar 4.13 Sudut Kemiringan Wajah
Hasil pengujian ditampilkan pada Gambar 4.13, secara berturut turut wajah berhasil terdeteksi dengan sudut kemiringan ±37º, ±21º, dan ±40º.
c) Pengujian Wajah Terhalang Objek
25 (b)
Gambar 4.14 Kontur Wajah Tidak Ditemukan
Pada Gambar 4.14a dan b, bahwa dari hasil pengujian sistem tidak dapat mengenali atau mendeteksi adanya wajah, karena tidak terdapat kontur wajah pada objek yang menghalangi wajah.
(a)
(b)
Gambar 4.15 Terdapat Kontur Wajah
Pada Gambar 4.15a sistem dapat mendeteksi wajah, ini dikarenakan penghalang berupa topi dan sejenisnya tidak menghilangkan atau merubah
26 kontur wajah. Sedangkan pada Gambar 4.15b sistem juga dapat mendeteksi adanya wajah ini karena penghalang kacamata memiliki kontur yang sama dengan mata sehingga penghalang dengan kacamata dan sejenisnya tidak menghilangkan kontur dari wajah.
d)Pengujian Berdasarkan Pencahayaan
Pada pengujian berdasarkan pencahayaan ini, sistem dapat mendeteksi wajah berdasarkan intensitas cahaya yang tertuju ke wajah. Untuk mengetahui initensitas cahaya maka dibutuhkan nilai histogram dari objek wajah. Pengujian ini akan dilakukan dengan bantuan matlab untuk mendapatkan nilai tingkat kecerahan dari citra wajah.
Tabel 4.3 Tingkat Kecerahan
Citra Histogram Rata-rata nilai Histogram Gelap 10.11 Terang 163.99
Berdasarkan Tabel 4.3 pada nilai histogram citra gelap terlihat tingkat kegelapan yang sangat dominan sehingga setelah dilakukan pencarian rata-rata pada nilai histogram maka didapat untuk citra gelap bernilai 10.11, citra gelap sendiri diambil di dalam ruangan yang sangat minim cahaya masuk.
27 Sedangakan citra terang diambil di luar ruangan dengan cahaya matahari langsung, sehingga terlihat pada histogram bahwa terdapat kecerahan yang paling dominan maka didapat nilai histogram 163.99. Oleh karena ini sistem berhasil mendeteksi wajah dari nilai rata-rata histogram 10.11 sampai dengan 163.99.
Maka dari hasil pengujian sistem pendeteksi wajah, ditampilkan tabel hasil pengujian yang diperoleh secara ringkas pada Tabel 4.4.
Tabel 4.4 Tabel Hasil Pengujian Sistem Pendeteksi Wajah
Jenis Pengujian Keteranga Hasil
Jarak Jangkauan Kamera Kamera berhasil mendeteksi wajah dengan jarak ± 15cm sampai dengan ±330cm
Berdasarkan Derajat kemiringan Ketika wajah kemiringan 0º atau
frontal maka sistem berhasil mendeteksi 100%, dan maksimum kemiringan wajah menghadap ke kiri atau ke kanan adalah ±37º, kemiringan wajah hadap ke bawah ±21º, kemiringan wajah hadap ke atas ±40º
Wajah terhalang objek Wajah tidak terditeksi jika objek penghalang menghilangkan kontur wajah.
Berdasarkan Pencahayaan Rata-rata histogram pencahayaan sistem dapat mendeteksi wajah antara 10.1147 sampai dengan 163.9997.
28
4.2. Hasil Pengujian Sistem Pengendali Arah Kipas
4.2.1.Sistem Pengendalian Arah Kipas dengan Metoda Zigler Nichols
a) Hasil Pengujian Dengan Konstanta Kp
Berdasarkan dengan landasan teori tentang tuning ziggler nichols, yang pertama kali dilakukan yaitu dengan melakukan percobaan mengunakan pengandali P dengan menaikan nilai konstanta Kp sedikit demi sedikit untuk menemukan respon sistem yang memiliki osilasi yang berkesinambungan. Berdasarkan hasil percobaan konstanta Kp yang menghasilkan respon osilasi yang berkesinambungan, yaitu dengan nilai Kp=1, sebagaimana diperlihatkan pada LAMPIRAN A.
b)Hasil Perhitungan Nilai Konstanta Kp, Ki, Kd
Dari hasil pengujian pada gambar LAMPIRAN A, dengan melakukan perbesaran pada daerah osilasi yang berkesinambungan sebagaimana Gambar 4.16 maka peneliti dapat mengambil nilai yang digunakan untuk menghitung nilai konstanta Kp, Ki, Kd.
Gambar 4.16. Osilasi Output Kontrol Motor Berdasarkan respon osilasi pada Gambar 4.16 maka ketahui,
𝑇1 = 10 𝑚𝑠 𝑇2 = 28 𝑚𝑠 𝑃𝑐𝑟 = 𝑇2 − 𝑇1 = 28 − 10 𝑚𝑠 = 18 𝑚𝑠 𝑃𝑐𝑟 = 0,018 𝑠 98,8 99 99,2 99,4 99,6 99,8 100 100,2 0 10 20 30 40 50 60 N ilai Ro ta ry E n co d er Time (ms) T1 T2 28
29 Tabel 4.5 Nilai Kcr&Pcr
Kcr Pcr (s) Waktu Sample
(ms)
Kp = 1 0,018 1
Berdasarkan Tabel 2.1 yang merupakan ketentuan Zigler Nichols maka dapat dihitung nilai-nilai Kp, Ki, Kd :
𝑲𝒑 = 𝟎. 𝟔 × 𝟏 = 𝟎. 𝟔
𝑲𝒊 = 𝟎. 𝟓 × 𝟎. 𝟎𝟏𝟖 = 𝟎. 𝟎𝟎𝟗 𝑲𝒅 = 𝟎. 𝟏𝟐𝟓 × 𝟎. 𝟎𝟏𝟖 = 𝟎. 𝟎𝟎𝟐𝟐𝟓
4.2.2.Hasil Pengujian Pengendalian Arah Kipas
Setelah didapatkan nilai-nilai konstanta Kp, Ki, Kd maka dilakukan percobaan dengan menggunakan pengandali PID. Hasil percobaan menggunakan pengendali PID zigler nichols didapat respon seperti gambar pada LAMPIRAN B. Adapun nilai-nilai dari respon tersebut diperlihatkan sebagaimana pada Tabel 4.6.
Tabel 4.6 Respon SistemPengendali Arah Kipas dengan Metoda Zigler Nichols Set Point (𝒚𝒇𝒊𝒏𝒂𝒍) Rise Time (𝒕𝒓) Settling Time (𝒕𝒔) Setteling Max (Smax) Setteling Min (Smin) Peak % Overshoot (Mp) 100 Count 74 ms 89 ms 103 Count 99 Count 103 Count 3%
Dari nilai-nilai yang ditampilkan pada Table 4.6 maka nilai persentase
Overshoot dan Peak dapat ditentukan menggunakan Persamaan di bawah ini:
𝑃𝑒𝑎𝑘 = 𝑆𝑚𝑎𝑥 = 103Count %𝑂𝑣𝑒𝑟𝑠ℎ𝑜𝑜𝑡 (𝑀𝑝) = |𝑦𝑓𝑖𝑛𝑎𝑙− 𝑃𝑒𝑎𝑘 𝑦𝑓𝑖𝑛𝑎𝑙 | × 100 = |100−103 100 |× 100 %𝑂𝑣𝑒𝑟𝑠ℎ𝑜𝑜𝑡(𝑀𝑝) = 3 %
30
4.3. Hasil Pengujian Tracking Arah Kipas Berdasarkan Wajah
Hasil pengujian Tracking Arah Kipas Berdasarkan Wajah pada penelitian ini dapat dilihat pada LAMPIRAN C sampai dengan L. Berdasarkan hasil pengujian tersebut yang berjumlah sebanyak 20 kali percobaan maka dapat diperoleh persentase rata-rata
error sebagaimana yang diperlihatkan pada Tabel 4.8.
Tabel 4.8 Rata-Rata Persentase Error Pengujian
No. Percobaan ke - Rata-rata Error (%)
1 1 16,48 2 2 14,99 3 3 12,94 4 4 9,91 5 5 4,06 6 6 1,80 7 7 1,01 8 8 1,06 9 9 1,80 10 10 2,26 11 11 2,16 12 12 2,34 13 12 1,75 14 14 1,20 15 15 1,63 16 16 1,05 17 17 1,61 18 18 1,54 19 19 1,69 20 20 1,44 Rata - rata 4,14
Dari Table 4.8 dapat dijelaskan bahwa hasil percobaan pertama sampai percobaan ke-5, sistem terdapat error yang sangat besar yaitu dari rentang 4,06% -16,48%. Sedangkan percobaan ke-6 sampai dengan percobaan ke-20 sistem memiliki
31
4.4. Analisa Hasil Pengujian Sistem
4.4.1.Analisa Sistem Pendeteksi Wajah
a) Dengan menggunakan kamera 5 Mege Pixel sistem mampu mendeteksi wajah dengan jangkauan minimal ±15 cm dan maksimal ±330 cm. Dengan menggunkan kamera yang beresolusi tinggi tingkat kecerahan merupakan kebutuhan yang kecil dalam mendeteksi wajah pada library OpenCV hal ini dapat dibuktikan dengan rendahnya rata-rata histogram yang dibutuhkan saat mendetksi wajah, atau dalam cahaya yang minim sistem masih mampu mendeteksi wajah.
b) Sistem pendeteksi wajah tidak mampu mendeteksi wajah dengan tingkat kemiringan melebihi 37º ke kiri dan kanan, 40º ke atas, dan 21º ke bawah, hal ini diakibatakan karena semakin miring wajah atau objek maka kontur wajah akan hilang, sehingga sistem tidak dapat mengenali wajah. Pendeteksi wajah tanpa mendapat kontur wajah yang lengkap sangat bertentangan dengan fitur
haar pada library OpenCV, karena fitur haar dibentuk berdasarkan kontur wajah dan bagian-bagian wajah.
4.4.2.Analisa Sistem Pengendali PID dengan TuningZigler Nichols
a) Pengendalian Motor DC dengan menggunakan PID kontrol dengan metoda
tuningZigler Nichols merpakan cara yang cukup cepat dalam mencari konstanta Kp, Ki, dan Kd. Hal ini dapat dibuktikan dari langkah-langkah dalam mencari konstanta PID, dimana pertama kali dilakuakan adalah men-train satu konstanta saja, dengan respon dari konstanta tersebut kita bisa mengetahui karakteristik respon sistem, dan juga sebagai acuan mencari nilai-nilai konstanta Kp,Ki dan Kd. Perbandingan kecepatan metoda Zigler Nichols dalam mencari konstanta PID dibanding harus melakukan train terhadap konstanta Kp, Ki, Kd satu-persatu adalah 3:1, yang artinaya tuningZiger Nichols memiliki kecepatan 3 kali lebih cepat dari metoda train error.
b) Pengendali PID dengan metoda tuning Zigler Nichols dapat menghasilkan respon sistem yang bagus walaupun di tuning dengan cara yang cepat, hal ini dibuktikan dengan rendahnya nilai overshoot hal dihasilkan oleh sistem, dan cepatnya waktu setteling time yang membuat sistem dapat menuju setpoin yang diinginakan dengan cepat.
32
4.4.3.Analisa Hasil Tracking Arah Kipas Berdasarkan Wajah
a) Tracking kipas berdasarkan wajah merupakan integrasi antara sistem pengendali PID pada motor DC yang menjadikan wajah sebagai acuan. Kipas dapat
men-tracking manusia berdasarkan wajah dengan cukup bagus, walaupun terdapat
error berupa perbedaan sudut tracking terhadap posisi objek wajah.
b) Arah Kipas terdapat error yang cukup signifikan ketika diuji pada jarak 15cm sampai dengan 75cm hal ini diakibatkan karena posisi hardware kamera android yang digunakan tidak lurus terhadap objek wajah. Sedangkan ketika objek wajah berada 75cm sampai dengan 330cm kipas berhasil men-tracking dengan error yang relatif kecil, hal ini karena semakin jauh posisi objek wajah yang
di-tracking seolah-olah pada kamera semakin lurus objek terhadap kamera, adapun
error yang lainnya diakibatakan oleh mekanik gearbox motor dc yang goyang.
c) Berdasarkan hasil pengujian posisi arah kipas terdapat error positif dan negatif terhadap posisi objek wajah yang di-tracking. Rata-rata error yang dihasilkan adalah 4,14%, dengan artian 95,86 % proses tracking berhasil.
33
BAB 5
KESIMPULAN DAN SARAN 5.1. Kesimpulan
a) Sistem kipas pengikut manusia berdasarkan wajah mampu membedakan antara manusia dengan hambatan lain berdasarkan wajah.
b) Dengan menggunakan libraryOpenCV wajah dapat terditeksi dengan ketentuan terdapatnya kontur wajah yang lengkap berserta objek yang menyerupai kontur wajah.
c) Sistem Kendali Motor DC dengan menggunakan metode tuning Zigler Nichols
membuat sistem tracking arah kipas berdasarkan wajah menjadi terkendali dengan baik, kipas berhasil men-tracking manusia berdasarkan wajah dengan tingkat rata-rata keberhasilan 95,86 %, dan terdapat error 4.14%.
5.2. Saran
Adapun bererapa saran yang akan peneliti berikan untuk kedepannya agar sistem menjadi lebih bagus, diantaranya :
a) Agar membuat lebih fix gearbox motor dc supaya tidak menjadi error initial dari awal sistem dibangun.
b) Agar menggunakan kamera yang ketika menangkap objek, menghadap lurus dengan objek, sehingga dapat mengurangi error disaat proses
tracking.
c) Agar dapat menambahakan sistem tracking yang dapat menangani ketika sistem mendeteksi banyak wajah dalam waktu yang bersamaan.
34
DAFTAR PUSTAKA
[1] T. Ishrat, M. A. Rahaman and A. Ahammad, "Smart fan for human tracking," 2014 9th International Forum on Strategic Technology (IFOST), Cox's Bazar, 2014, pp. 124-127.
[2] RD. Kusumanto, Alan Novi Tompunu, "Pengolahan Citra Digital Untuk Mendeteksi Obyek Menggunakan Pengolahan Warna Model Normalisasi Rgb", Seminar Nasional Teknologi Informasi & Komunikasi Terapan 2011 (Semantik 2011), 2011.
[3] Christopher Kanan, Garrison W. Cottrell, "Color-to-Grayscale: Does the Method Matter in Image Recognition?", PLoS ONE 7(1): e29740, 2012.
[4] Helvig Jensen, "Implementing the Viola-Jones Face Detection Algorithm", Kongens Lyngby 2008.
[5] Yi-Qing Wan, "An Analysis of the Viola-Jones Face Detection Algorithm", "Image Processing On Line", June 2014.
[6] Bradski, Gary R. Learning OpenCV: computer vision with the OpenCV library. Farnham ; Cambridge: O’Reilly, 2008.
[7] P. Viola and M. Jones, "Rapid object detection using a boosted cascade of simple features", Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, 2001, pp. I-511-I-518 vol.1.
[8] Ankit Rastogi and Pratibha Tiwari,”Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control Using Particle Swarm Optimization”, International Journal of Soft Computing and Engineering, Volume-3, Issue-2, May 2013.
[9] Dingy¨u Xue, YangQuan Chen and Chunna Zhao, “Fractional Order PID Control of A DC-Motor with Elastic Shaft:A Case Study”, Proceedings of the 2006 American Control Conference Minneapolis, Minnesota, USA, June 14-16, 2006
[10] Saurabh Dubey, Dr. S.K. Srivastava, "A PID Controlled Real Time Analysis of DC Motor,International Journal of Innovative Research in Computer and Communication Engineering”, Vol.1,Issue 8, October 2013.
[11] Dr. Jamal A. Mohammed, “ Modeling, Analysis and Speed Control Design Methods of a DC Motor”, Eng. & Tech.Journal ,vol.29, no.1, 2011.
[12] Dr.Ch.Chengaiah, K.Venkateswarlu, "COMPARATIVE STUDY ON DC MOTOR SPEED CONTROL USING VARIOUS CONTROLLERS", International Journal of
35 Advanced Research in Electrical, Electronics and Instrumentation Engineering,Vol.3, Issue 1, January 2014.
[13] Vivek Shrivastva, Rameshwar Singh, "Performance Analysis of Speed Control of Direct Current (DC) Motor using Traditional Tuning Controller", International Journal of Emerging Technology and Advanced Engineering, Vol 4, Issue 5, May 2014. [14] Virgala, Ivan, and Peter Frankovský, Mária Kenderová. "Friction Effect Analysis of a
DC Motor", American Journal of Mechanical Engineering 1.1 (2013).
[15] V. Suhas kumbhar, P. Suhas Kumbhar, Vinod B. Kumbhar, Prashant P. Zirmite, Design and Implementation of an Electronic System for Identification of Rebars in Reinforced Concrete, Vol. 03, Issue 12, 2016.
[16] Kamarudin dan Endra Pitowarno, “Kontrol 3D Inersia Berbasis Proportional Derivative Active Force Control (PDAFC)”, “The 3rd Indonesian Symposium on Robot Soccer Competition 2015”, June 2015.
[17] Kamarudin and E. Pitowarno, "2D independent actuator control based on a Proportional Derivative Active Force Control", 2015 International Electronics Symposium (IES), Surabaya, 2015, pp. 79-84.
[18] Kamarudin, Pitowarno, Endro, Dewanto, R. Sanggar, "3D Independent Actuators Control Based On A Proportional Derivative Active Force Control", Journal of Ocean Mechanical and Aerospace -Science and Engineering", Vol.32, June 2016.
[19] Ikpe Aniekan E, Owunna Ikechukwu, Satope Paul, "Comparative Analysis of a PID Controller using ZieglerNichols and Auto Turning Method", "International Academic Journal of Science and Engineering", Vol. 3, N.10, 2016, pp. 1-16.
[20] Y.V. Naga Sundeep, P. Nanda Kumar, Y. Vamsi Babu, K. Harshavardhan ,"Stability Control of an Interconnected Power System Using PID Controller","Journal Of Advanced Research in Engineering & Management (IJAREM)", May 2015, Vol. 01. [21] Bambang Supriyo, Samuel BETA Kuntardjo, dan Sihono, "Alat Peraga Kendali Pemanas Udara Berbasis Arduino Uno Sebagai Penunjang Praktikum Laboratorium Kendali Politeknik Negeri Semarang", "FaST - Jurnal Sains dan Teknologi", November 2017, Vol.1 No.1.
[22] “Zigler Nichols Metodh” Internet : http://kurser.iha.dk/m/mtpri1/control/3_PID/f_ziegler/ziegler_nichols_method.html, [3 Maret 2018]
36
LAMPIRAN A. Gambar Grafik Hasil Pengendali P Pada Konstanta Kp = 1
0 20 40 60 80 100 120 0 100 200 300 400 500 600 N ilai Ro ta ry E n co d er Time (ms)
Grafik Pengendali P
SetPoint PV with Kp = 137
LAMPIRAN B. Gambar Grafik Hasil Pengendali PID pada Arah Kipas dengan Metoda Zigler Nichols
𝑡𝑟 𝑡𝑝 𝑡𝑠
𝑠𝑚𝑎𝑥
𝑠𝑚𝑖𝑛
7479 89
38
LAMPIRANC.Data Hasil Percobaan 1 & 2
c) Data Ketika Jarak Objek Wajah = 15 cm Tabel Percobaan 1
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 30 25 3 50 34 32 4 60 45 25 5 70 54 22,85 6 80 64 20 7 90 75 16,66 8 100 85 15 9 110 95 13,63 10 120 104 13,33 11 130 116 10,76 12 140 126 10 13 150 135 10
d) Data Ketika Jarak Objek Wajah = 30 cm Tabel Percobaan 2
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 31 22,5 3 50 37 26 4 60 45 25 5 70 55 21,42 6 80 68 15 7 90 75 16,66 8 100 86 14 9 110 97 11,81 10 120 105 12,5 11 130 117 10 12 140 126 10 13 150 135 10
39
LAMPIRAN D. Data Hasil Percobaan 3 & 4 Data Ketika Jarak Objek Wajah = 45 cm
Tabel Percobaan 3
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 33 17,5 3 50 37 26 4 60 47 21,66 5 70 58 17,14 6 80 70 12,5 7 90 78 13,33 8 100 89 11 9 110 97 11,81 10 120 107 10,83 11 130 117 10 12 140 128 8,57 13 150 138 8
Data Ketika Jarak Objek Wajah = 60 cm Tabel Percobaan 4
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 35 12,5 3 50 40 20 4 60 51 15 5 70 60 14,28 6 80 72 10 7 90 81 10 8 100 92 8 9 110 99 10 10 120 111 7,5 11 130 119 8,46 12 140 131 6,42 13 150 140 6,66
40
LAMPIRAN E. Data Hasil Percobaan 5 & 6 Data Ketika Jarak Objek Wajah = 75 cm
Tabel Percobaan 5
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 36 10 3 50 46 8 4 60 55 8,33 5 70 64 8,57 6 80 76 5 7 90 86 4,44 8 100 95 5 9 110 104 5,45 10 120 115 4,16 11 130 126 3,07 12 140 135 3,57 13 150 146 2,66
Data Ketika Jarak Objek Wajah = 90 cm Tabel Percobaan 6
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0 2 40 38 5 3 50 49 2 4 60 58 3,33 5 70 69 1,42 6 80 78 2,5 7 90 89 1,11 8 100 98 2 9 110 109 0,9 10 120 118 1,66 11 130 129 0,76 12 140 138 1,48 13 150 148 1,33
41
LAMPIRAN F. Data Hasil Percobaan 7 & 8 Data Ketika Jarak Objek Wajah = 115 cm
Tabel Percobaan 7
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0,00 2 40 40 0,00 3 50 49 2,00 4 60 59 1,67 5 70 71 1,43 6 80 81 1,25 7 90 90 0,00 8 100 98 2,00 9 110 108 1,82 10 120 121 0,83 11 130 132 1,54 12 140 140 0,00 13 150 149 0,67
Data Ketika Jarak Objek Wajah = 130 cm Tabel Percobaan 8
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 30 0,00 2 40 38 5,00 3 50 50 0,00 4 60 61 1,67 5 70 69 1,43 6 80 81 1,25 7 90 92 2,22 8 100 100 0,00 9 110 110 0,00 10 120 119 0,83 11 130 129 0,77 12 140 140 0,00 13 150 149 0,67
42
LAMPIRAN G. Data Hasil Percobaan 9 & 10 Data Ketika Jarak Objek Wajah = 145 cm
Tabel Percobaan 9
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 32 6,67 2 40 39 2,50 3 50 52 4,00 4 60 59 1,67 5 70 71 1,43 6 80 79 1,25 7 90 91 1,11 8 100 100 0,00 9 110 112 1,82 10 120 118 1,67 11 130 130 0,00 12 140 140 0,00 13 150 148 1,33
Data Ketika Jarak Objek Wajah = 160 cm Tabel Percobaan 10
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 32 6,67 2 40 38 5,00 3 50 50 0,00 4 60 58 3,33 5 70 68 2,86 6 80 79 1,25 7 90 92 2,22 8 100 98 2,00 9 110 111 0,91 10 120 122 1,67 11 130 128 1,54 12 140 139 0,71 13 150 148 1,33
43
LAMPIRAN H. Data Hasil Percobaan 11 & 12 Data Ketika Jarak Objek Wajah = 175 cm
Tabel Percobaan 11
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 32 6,67 2 40 42 5,00 3 50 49 2,00 4 60 58 3,33 5 70 69 1,43 6 80 81 1,25 7 90 88 2,22 8 100 101 1,00 9 110 111 0,91 10 120 121 0,83 11 130 131 0,77 12 140 138 1,43 13 150 148 1,33
Data Ketika Jarak Objek Wajah = 190 cm Tabel Percobaan 12
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 32 6,67 2 40 38 5,00 3 50 52 4,00 4 60 62 3,33 5 70 71 1,43 6 80 78 2,50 7 90 89 1,11 8 100 99 1,00 9 110 109 0,91 10 120 122 1,67 11 130 131 0,77 12 140 138 1,43 13 150 149 0,67
44
LAMPIRAN I. Data Hasil Percobaan 13 & 14 Data Ketika Jarak Objek Wajah = 215 cm
Tabel Percobaan 13
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 32 6,67 2 40 40 0,00 3 50 48 4,00 4 60 58 3,33 5 70 68 2,86 6 80 81 1,25 7 90 90 0,00 8 100 101 1,00 9 110 110 0,00 10 120 119 0,83 11 130 129 0,77 12 140 139 0,71 13 150 148 1,33
Data Ketika Jarak Objek Wajah = 230 cm Tabel Percobaan 14
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 31 3,33 2 40 40 0,00 3 50 50 0,00 4 60 59 1,67 5 70 71 1,43 6 80 78 2,50 7 90 88 2,22 8 100 101 1,00 9 110 110 0,00 10 120 120 0,00 11 130 129 0,77 12 140 138 1,43 13 150 148 1,33
45
LAMPIRAN J. Data Hasil Percobaan 15 & 16 Data Ketika Jarak Objek Wajah = 245 cm
Tabel Percobaan 15
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 31 3,33 2 40 39 2,50 3 50 52 4,00 4 60 59 1,67 5 70 68 2,86 6 80 79 1,25 7 90 90 0,00 8 100 99 1,00 9 110 109 0,91 10 120 118 1,67 11 130 129 0,77 12 140 140 0,00 13 150 148 1,33
Data Ketika Jarak Objek Wajah = 260 cm Tabel Percobaan 16
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 31 3,33 2 40 40 0,00 3 50 50 0,00 4 60 62 3,33 5 70 71 1,43 6 80 81 1,25 7 90 90 0,00 8 100 101 1,00 9 110 112 1,82 10 120 120 0,00 11 130 132 1,54 12 140 140 0,00 13 150 150 0,00
46
LAMPIRAN K. Data Hasil Percobaan 17 & 18 Data Ketika Jarak Objek Wajah = 275 cm
Tabel Percobaan 17
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 31 3,33 2 40 42 5,00 3 50 49 2,00 4 60 61 1,67 5 70 71 1,43 6 80 80 0,00 7 90 88 2,22 8 100 100 0,00 9 110 111 0,91 10 120 121 0,83 11 130 132 1,54 12 140 142 1,43 13 150 149 0,67
Data Ketika Jarak Objek Wajah = 290 cm Tabel Percobaan 18
No. Posisi Objek (º) Hasil Tracking (º) Error (%)
1 30 31 3,33 2 40 41 2,50 3 50 52 4,00 4 60 60 0,00 5 70 72 2,86 6 80 80 0,00 7 90 92 2,22 8 100 98 2,00 9 110 108 1,82 10 120 120 0,00 11 130 130 0,00 12 140 141 0,71 13 150 149 0,67
![Gambar 2.4 Ilustrasi Output Rotary Encoder[15]](https://thumb-ap.123doks.com/thumbv2/123dok/3107174.2330610/18.892.307.686.1036.1129/gambar-ilustrasi-output-rotary-encoder.webp)
![Gambar 2.6 Nilai Pcr[22].](https://thumb-ap.123doks.com/thumbv2/123dok/3107174.2330610/20.892.223.785.179.933/gambar-nilai-pcr.webp)