PERANCANGAN DAN REALISASI PENGUKUR KECEPATAN 4 RODA MODEL MOBIL DESIGN AND IMPLEMENTATION 4-WHEEL CAR MODEL
SPEEDOMETER
Putut Purnama¹, Agus Virgono², Joko Haryatno ³
¹Teknik Telekomunikasi, Fakultas Teknik Elektro, Universitas Telkom
Abstrak
Kebutuhan bahan bakar minyak dunia terus meningkat. Di bidang transportasi, penggunaan listrik sebagai pengganti bahan bakar minyak telah dimulai penelitiannya. Arah penelitian pada mobil listrik selanjutnya adalah membuat mobil listrik membuat mobil listrik dengan empat buah motor listrik yang diletakkan di keempat rodanya yang memiliki tenaga gerak sebesar mungkin dengan kestabilan yang tinggi dan dimensi mesin yang dibuat sekecil mungkin sehingga tersedia ruang yang lebih besar untuk menyimpan baterai.
Hal yang dikerjakan didalam tugas akhir ini adalah membuat model kendaraan mobil yang merupakan miniatur dari mobil listrik sesungguhnya dan membuat sistem elektronik yang digunakan untuk mengetahui banyaknya putaran roda yang merupakan langkah awal untuk menemukan solusi permasalahan terbesar dalam mengimplementasikan mobil listrik jenis ini yaitu sulitnya melakukan pengontrolan motor dikeempat rodanya.
Model mobil yang dibuat adalah miniatur dari mobil Suzuki ST 10S yang ditiru dari desain
kerangkanya saja. Sedangkan fungsi utama dari sistem elektronik yang dibuat adalah sistem yang dapat membaca banyak putaran dari setiap roda dengan akurasi yang tinggi dan mengirimkannya secara serial ke komputer. Sistem elektronik ini menggunakan counter 16-bit dan Ic
mikrokontroler Atmel AT89C51. Setelah data diterima dikomputer, kemudian data diolah oleh software aplikasi mengunakan 6.0, untuk mengetahui seberapa besar sensitifitas pembacaan putaran roda dari sistem mekanik dan elektronik yang dibuat.
Hasil analisanya adalah data pembacaan putaran roda untuk pengukuran pada sudut belok kanan atau kiri memiliki rata-rata error sebesar 135 Cm dari rata-rata jarak tempuh sebesar 1325.965 Cm. Hasil yang dicapai ini adalah baik. Adapun penyebab utama terjadinya error adalah pada mur-mur model mobil bagian roda dan sensor yang kendor.
Abstract
Electric car is a solution for lack of oil in the world. This final purpose is to make an electric car that used 4 engine that placed on each of wheels, because there are a few benefit of it, less of engine dimension so that car can carry bigger battery for its supply, high stability car because there is no slip wheel because of moving too slow/fast in every turn. But the main problem is about engine controlling mechanism.
First step to find that solution is worked on this final project. This final project purpose is to get valid wheel spin data from measurement process, then the data is analyzed using the application software to determined its precision level. This final project also has another purpose to make a car-model that will be used in measurement process and also useful for next research.
The car-model is made based on the dimension of real car. The real car that used is Suzuki ST10S that well known by “Truntung”. The limitation from this car model just made based on chassis and wheel dimension, because the data is related with these parameter. The electrical system is used to read wheel spin data with high precision result and send it to computer through serial port. The electrical system is featured with 16 bit binary counter, AT89C51 microcontroller as main processor. And the application software is made with Visual Basic 6.0 that have 2 functions, first is to read binary data for car model convert it to decimal format and save it, second is to determined the precision of the data by comparing it with data from calculation process. The result is wheel spin data at its degree of bent contain average error 135 Cm from 1325.965 Cm average distance of measurement, and this is satisfied. The couse of error is on every moor in wheel and sensor that get loose.
Keywords : Electrical vehicle, Suzuki ST10S, Counter 16-bit and Visual Basic 6.0.
Powered by TCPDF (www.tcpdf.org)
Tugas Akhir - 2008
BAB I
PENDAHULUAN
1.1 Latar Belakang
Menurut ramalan, pada tahun 2018 bahan bakar minyak di Indonesia akan habis. Harus ada jawaban akan masalah besar ini. Salah satu jawabannya adalah dengan menggunakan listrik sebagai sumber energi. Di bidang transportasi, penggunaan listrik sebagai pengganti bahan bakar minyak telah dimulai penelitiannya, arah penelitian pada mobil listrik selanjutnya adalah membuat mobil listrik yang memiliki tenaga gerak sebesar mungkin dengan kestabilan yang tinggi dan dimensi mesin yang dibuat sekecil mungkin sehingga tersedia ruang yang lebih besar untuk menyimpan baterai, karena semakin besar dimensi baterai maka semakin lama pula mobil listrik tersebut dapat digunakan. Jawabannya adalah dengan membuat mobil listrik dengan empat buah motor listrik yang diletakkan di keempat rodanya.
Tugas akhir yang dikerjakan ini adalah bagian awal dari riset mobil listrik tersebut. Hal yang dikerjakan didalam tugas akhir ini adalah membuat model mobil yang merupakan miniatur dari mobil listrik sesungguhnya dan membuat sistem elektronik yang digunakan untuk mengetahui perbedaan kecepatan putaran roda yang merupakan langkah awal untuk menemukan solusi permasalahan terbesar dalam mengimplementasikan mobil listrik jenis ini yaitu sulitnya melakukan pengontrolan putaran roda jika menggunakan motor dikeempat rodanya.
Model mobil yang dibuat adalah miniatur dari mobil Suzuki ST 10S yang ditiru dari desain kerangkanya saja. Kerangka yang dibuat memiliki desain meniru desain kerangka mobil sesungguhnya. Kerangka yang dibuat ini sangat memperhatikan segi kekokohan agar didapatkan hasil pengukuran yang akurat dan kerangka yang dibuat ini juga memiliki dimensi yang dapat diubah-ubah yang berguna jika ingin menerapkan pengukuran dengan dimensi model mobil yang berbeda. Sedangkan fungsi utama dari sistem elektronik yang dibuat adalah sistem yang dapat membaca banyak putaran dari setiap roda dengan akurasi yang tinggi dan mengirimkannya secara serial ke komputer. Dikomputer, kemudian data diolah oleh
BAB I PENDAHULUAN 2
INSTITUT TEKNOLOGI TELKOM
software aplikasi, sehingga diketahui seberapa besar sensitifitas pembacaan putaran roda dari sistem mekanik dan elektronik yang dibuat.
1.2 Tujuan dan Kegunaan
Hasil dari tugas akhir ini adalah membuat model mobil dan software penghitung putaran roda yang akan digunakan untuk mendapatkan data perbedaan kecepatan putaran roda yang didapat melalui proses pengukuran.
1.3 Perumusan Masalah
Secara umum, pengerjaan tugas akhir ini dibagi menjadi dua bagian, yaitu pembuatan model-mobil dan software pengolah data, oleh karena itu perumusan masalahnyapun dibagi menjadi dua bagian, yaitu:
1.3.1 Model-Mobil apa yang dimodelkan, di kesimpulan kok gak ada
Apakah kegunaan dibuatnya model-mobil ini ?. Model-mobil ini dibuat sebagai objek pengukuran, sehingga data yang didapat adalah data hasil percobaan dan bukan merupakan data hasil simulasi. Data yang ingin didapat dari pengukuran ini adalah data perbedaan kecepatan putar setiap roda pada sudut belok yang ditentukan.
Apakah kegunaan data pengukuran yang akan diambil ?. Data pengukuran ini berguna untuk mengetahui seberapa besar perbedaan kecepatan putar setiap roda pada sudut belok tertentu yang akan digunakan sebagai data acuan untuk mengontrol kecepatan motor pada riset mobil listrik selanjutnya.
Bagaimanakah proses pembacaan putaran dilakukan ?. Pembacaan putaran dilakukan oleh sensor optocoupler yang ditempatkan di setiap roda. Sensor ini akan membaca banyaknya garis hitam pada roda yang besarnya tergantung dari banyaknya putaran yang dilakukan roda. Kemudian data putaran roda tersebut dikirimkan secara serial ke komputer dengan format biner dengan panjang maksimal 16 bit.
Dapatkah model-mobil yang dibuat, digunakan untuk merepresentasikan mobil lain ?. Model mobil yang dibuat dimensinya dapat diubah-ubah tetapi dengan tetap memperhatikan faktor kekokohannya. Dimensi standarnya mengacu pada mobil Suzuki ST 10S.
Tugas Akhir - 2008
1.3.2 Software Pengolah Data
Untuk apa software pembaca putaran roda ini dibuat ?. Software ini dibuat untuk mengolah data hasil putaran roda yang dikirimkan secara serial ke komputer. Software yang dibuat ini terdiri dari dua bagian yaitu software pembaca putaran roda dan software penghitung keakuratan pembacaan putaran roda.
Bagaimana cara kerjanya ?. Software pembaca putaran roda berfungsi untuk membaca data putaran dari keempat roda yang dikirimkan secara serial ke komputer. Software ini kemudian mengubah data berformat binary dengan panjang 16 bit yang merupakan data jumlah baris yang terbaca oleh sensor optocoupler menjadi data berformat desimal agar lebih mudah dimengerti. Sedangkan software penghitung keakuratan berfungsi untuk membandingkan data jumlah baris hasil pengukuran dengan data jumlah baris hasil perhitungan secara teori, sehingga akan diketahui berapa keakuratan pembacaan sistem yang dibuat.
1.4 Batasan Masalah
1.4.1 Pembuatan Model-Mobil
Model-mobil dibuat dengan memenuhi kebutuhan sebagai berikut: 1. Model mobil yang dibuat mengikuti skala 1 : 2.2.
2. Dimensi standardnya mengacu pada dimensi chassis dan roda dari Suzuki ST-10S. 3. Ukuran panjang dan lebar dari model-mobil, dibuat agar dapat diubah-ubah
dengan tetap memperhatikan segi kokohan dan kekuatannya.
4. Pada bagian roda konstruksinya dibuat sama dengan mobil sesungguhnya.
5. Empat buah sensor gerak ditempatkan dikeempat rodanya dengan ketelitian pembacaaan = 256 pulsa per putaran dan panjang maksimal hitungan dari sensor adalah 16 bit.
6. Pengukuran hanya dilakukan pada jalan yang rata dan mendatar. 7. Data hasil pengukuran dikirimkan secara serial ke komputer.
8. Mikrokontroler yang digunakan adalah AT89C51 agar dapat menangani pengiriman data dengan lebar 16 bit.
1.4.2 Pembuatan Software Pengolah Data
Software pengolah data dibuat dengan memenuhi kebutuhan sebagai berikut: 1. Fungsi software pembaca putaran roda adalah untuk membaca data putaran roda
BAB I PENDAHULUAN 4
INSTITUT TEKNOLOGI TELKOM
mengubahnya menjadi data berformat desimal, dan menyimpan data tersebut dalam file dengan ekstensi .txt. Sedangkan software penghitung keakuratan berfungsi untuk membandingkan data putaran roda hasil pengukuran dengan data putaran roda hasil perhitungan yang hasil akhirnya adalah selisih jarak tempuh roda dan menyimpannya dalam file dengan ekstensi .txt.
1.5 Metodologi Penelitian
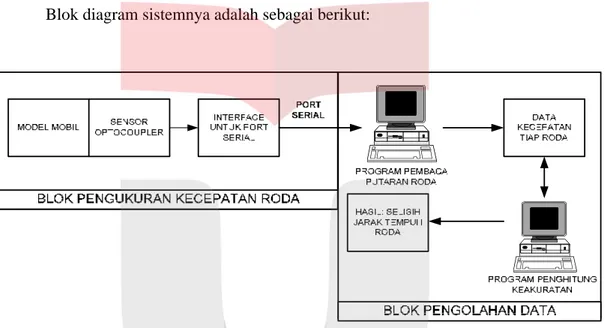
Blok diagram sistemnya adalah sebagai berikut:
Gambar 1.1 Blok diagram sistem secara umum
1.5.1 Permasalahan Model Mobil
Permasalahan yang ada tidak hanya mencakup pada pembuatan model mobilnya saja, tetapi juga pada pembuatan sistem elektroniknya. Permasalahan yang ada adalah sebagai berikut:
1. Membuat konstruksi model mobil yang mengacu pada konstruksi chassis dan roda pada Suzuki ST 10S dengan skala 1 : 2.2.
2. Harus dipilih bahan pembuat rangka model mobil yang kuat dan mudah dibentuk sehingga tidak berubah ukurannya ketika dilakukan proses pengukuran.
3. Ukuran panjang dan lebar dari model-mobil, dibuat agar dapat diubah-ubah dengan tetap memperhatikan segi kokohannya.
4. Membuat piringan sensor dan sensor cahaya yang dapat membaca putaran roda dengan kemampuan baca setinggi mungkin.
Tugas Akhir - 2008
5. Membuat rangkaian counter 16 bit untuk setiap roda dengan menggunakan bus pada jalur pengiriman data agar penggunaan port mikrokontrolernya lebih sedikit. 6. Mengirimkan data putaran roda dengan panjang 16 bit secara serial ke komputer.
1.5.2 Desain Model Mobil
Berdasarkan dari permasalahan yang ada, maka dibuatlah model-mobil sebagai berikut:
1. Bahan yang digunakan untuk membuatnya adalah alumunium persegi.
2. Roda bagian depan konstruksinya memungkinkan untuk dibelokkan dan dapat dikunci arah beloknya.
3. Sensor optocoupler yang dipilih adalah sensor dengan lebar gap 5 mm dan banyak garis yang terdapat pada piringan sensor dibuat sebanyak 256 garis.
4. Rangkaian counter 16 bit yang dibuat, data keluarannya diakses oleh mikrokontroler dengan menggunakan cara addressing. Sehingga 4 x 16 jalur data dapat dilewatkan dalam 1 x 16 jalur data saja.
5. Pengiriman data dengan panjang 16 bit secara serial ke komputer, dibagi menjadi 8 bit-8 bit kemudian disatukan kembali oleh software pembaca putaran roda di komputer.
1.5.3 Permasalahan Software Pengolah Data
Permasalahan yang ada dalam membuat software pengolah data ini adalah sebagai berikut:
1. Software yang dibuat mampu mengubah data berformat binary menjadi data berformat desimal.
2. Software yang dibuat mampu mengetahui seberapa besar kesalahan pembacaan data yang terbaca dan mampu menyimpan data yang telah diolah.
1.5.4 Desain Software Pengolah Data
Berdasarkan dari permasalahan yang ada, maka dibuatlah software pengolah data sebagai berikut:
1. Software yang dibuat dapat membaca data 2 x 8 bit yang dikirim oleh setiap roda dan menerjemahkannya menjadi data 16 bit.
2. Software yang dibuat mampu mengubah data 16 bit berformat binary menjadi data berformat desimal.
BAB I PENDAHULUAN 6
INSTITUT TEKNOLOGI TELKOM
3. Software yang dibuat dapat membandingkan data banyaknya putaran roda hasil pengukuran dengan data putaran roda hasil perhitungan.
4. Software yang dibuat dapat menyimpan data yang telah diolah kedalam file berekstensi .txt.
1.6 Sistematika Penulisan
Penulisan laporan dari tugas akhir ini dibagi menjadi lima bab sebagai berikut: BAB I PENDAHULUAN
Bab ini berisi tentang latar belakang, rumusan masalah, batasan masalah dan metodologi pemecahan masalah dalam membuat tugas akhir ini.
BAB II DASAR TEORI
Bab ini berisi tentang teori-teori sebagai tinjauan pustaka yang digunakan dalam mengerjakan tugas akhir ini. Teori-teori tersebut diantaranya adalah mobil Suzuki ST 10S, sensor optocoupler, voltage comparator, program Visual Basic 6.0 dan lain sebagainya.
BAB III PERANCANGAN DAN REALISASI
Bab ini membahas tentang langkah-langkah perancangan dan proses realisasi dari model mobil dan software pengolah data yang dibuat sehingga dapat diketahui spesifikasinya.
BAB IV ANALISA
Bab ini membahas tentang analisa dari data perbedaan kecepatan putaran roda dan analisa lain yang berkaitan.
BAB V PENUTUP
Bab ini adalah rangkuman dari seluruh pekerjaan yang dilakukan karena didalamnya berisi kesimpulan dari tugas akhir yang telah dilakukan dan saran dari hasil analisa tugas akhir ini.
Powered by TCPDF (www.tcpdf.org)
Tugas Akhir - 2008
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Kerangka model mobil dari ukuran terkecilnya dapat ditarik melebar hingga130 mm dan memanjang hingga 200 mm.
2. Sudut belok kiri/kanan maksimal yang dapat dicapai model mobil adalah 250. 3. Error paling besar dialami roda yang berada paling jauh dari sumbu belok, hal
ini disebabkan karena roda tersebut mengalami gesekan yang lebih besar dari roda yang berada lebih dekat dari sumbu belok.
4. Model mobil masih dapat memberikan pembacaan data dengan error dibawah 13 pulsa jika model mobil dijalankan dengan kecepatan dibawah 32 Cm/detik. . Sedangkan jika model mobil dijalankan dengan kecepatan yang lebih besar dari 32 Cm/detik maka error data yang dihasilkan menjadi random.
5. Rangkaian sensor optocoupler, voltage comparator dan debouncing dapat menghasilkan pulsa pada level TTL dengan baik dan bukan merupakan penyebab terjadinya ripple tegangan, penyebab utamanya adalah mur penguci roda yang terletak pada shaft roda dan mur dudukan sensor optocoupler di kerangka model mobil yang kendor.
6. sudut belok kanan atau kiri memiliki rata error sebesar 135 Cm dari rata-rata jarak tempuh sebesar 1325.965 Cm.
7. Banyaknya data pengukuran dari setiap jenis pengukuran sudah memenuhi syarat sample minimum yang dibutuhkan. Jumlah sample maksimal yang dibutuhkan untuk setiap pengukuran adalah 8.
8. Perhitungan matematis yang dilakukan oleh program Visual Basic 6.0 terkadang menghasilkan error lebih kecil 4 angka satuan dibandingkan dengan hasil perhitungan calculator.
BAB V KESIMPULAN DAN SARAN 48
INSTITUT TEKNOLOGI TELKOM 5.2 Saran
1. Agar model mobil dapat bergerak otomatis dapat ditambahkan motor disetiap roda yang mempunyai diameter puley motor yang besar dan diameter puley roda yang kecil agar motor kuat menggerakkan model mobil.
2. Data pengukuran dapat diperluas dengan mengambil data kecepatan putaran roda pada seluruh perubahan kecepatan (kecepatan mobil ketika diam hingga konstan).
3. Rangkaian counter 16 bit diganti dengan menggunakan 2 buah mikrokontroler AT89C2051 dengan cara memasukkan data dari setiap sensor optocoupler ke pin interupsi eksternal yang flag interupsinya akan selalu dibaca sehingga dapat berfungsi sebagai counter agar lebih tahan terhadap noise.
4. Sebelum menggunakan model mobil untuk pengukuran, agar memeriksa mur-mur roda terlebih dahulu.
Powered by TCPDF (www.tcpdf.org)
Tugas Akhir - 2008
DAFTAR PUSTAKA
1. S, Wasito, 1995, Vademekum elektronika, PT Gramedia Pustaka Utama, Jakarta.
2. Putra, Agfianto, Belajar mikrokontroler AT89C51 /52/55 Gava Media.
3. Prasetia, Retna dan Edi Widodo, Catur. Teori dan Praktek Interfacing Port Paralel
dan Port Serial Komputer dengan Visual Basic 6.0, Andi, Yogyakarta.
4. Pengetahuan tentang mobil Mitsubishi Lancer Evolution MIEV.
http://seriouswheels.com/2005/2005-Mitsubishi-Lancer-Evolution-MIEV-Concept
5. MSDN Visual Basic 6.0 help.